
Un youtuber se ha empeñado en construir una versión real del equipo de maniobras tridimensionales del anime. Y sorprendentemente funciona… a veces.

Un montaje consistente en una CPU de 16 bits con hojas de estilo: ejecuta demos y no requiere ni JavaScript, pero es lento como el hambre.

Entre blue boxes y revistas, surgió una nueva tribu tecnológica; luego llegó la rivalidad y un festival de juicios penales.

Bricolaje fino: un chip de pago en el interior, una antena miniaturizada, y una tapa a medida. Resultado: un reloj de cuarzo ochentero para pagar en las tiendas.

El proceso está en marcha para que suceda lo mismo en algunos más.

El hacker original: curiosidad infinita, humor contagioso y, por supuesto, Unix. Un legado que sigue inspirando.

Ideal para detectar el hidrógeno galáctico y demostrar que el cartón sirve para algo más que para montar cajas.

La confusión con los crackers lleva décadas instaurada en los medios de comunicación y querer aclararlo es prácticamente una batalla perdida.

Los crackers de Lazarus Group robaron 1.500 millones de Ethereum a Bybit. Dinero para programas militares norcoreanos. Criptoseguridad, ¿dónde estás?

La calculadora de Will: 156 engranajes, 304 piezas y el poder de sumar, restar, multiplicar y dividir sin electricidad. ¿Quién necesita ordenadores pudiendo calcular así?

Wozniak recuerda sus días como creador del Apple II y critica la nube, la inteligencia artificial sin regulación y advierte del peligro de los deepfakes.

La pasión por la microscopía llevada a su extremo.
Una pareja crea un ordenador singular con 1.700 válvulas de vacío, diseño moderno de 8 bits y el espíritu de la retroinformática.

Aunque soldar componentes y chips es algo que solo hacen los más aficionados al hardware y la electrónica es algo que en realidad está al alcance de todo el mundo. Con algunos conocimientos, paciencia y algo de destreza manual es barato...

Según data la historia, el mítico Homebrew Computer Club se fundó el 5 de marzo de 1975. La primera reunión de hackers fue en el garaje de Gordon French en Menlo Park (California) y acudieron unas 30 personas interesadas en el...

I made a website. it's called "one million checkboxes dot com". it has one million checkboxes on it.checking a box checks it for everyone.that's it. have fun! pic.twitter.com/KBF4UqCMJc— nolen (@itseieio) June 26, 2024 Me ha encantado la historia que cuenta Nolen Royalty...
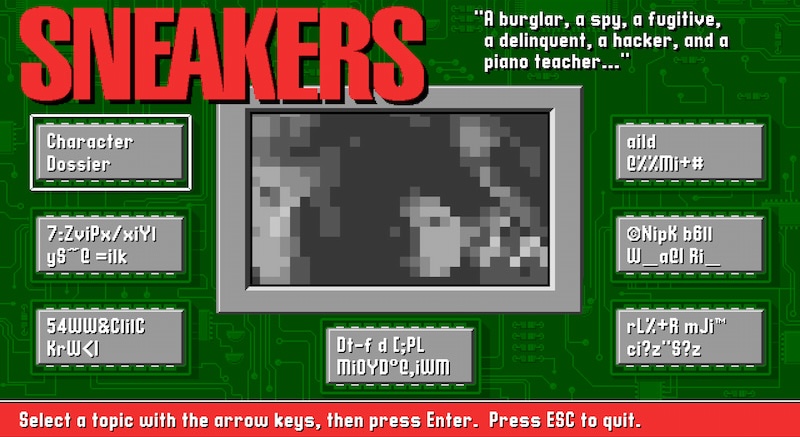
En el archivo de internet puede encontrarse el Kit de prensa original de Sneakers, la película de hackers de 1992 que marcó época, y una de nuestras favoritas. El disquete original con el que se generó la versión para el archivo...

Del departamento de «no me da la vida y se me acumulan los enlaces» llega el anuncio de la Raspberry Pi 5, que en realidad se produjo a finales de septiembre. Es una mejora de la 4, presentada en 2019. Aunque...

Cuentan que hay un pájaro en Detroit (Estados Unidos) que de algún modo sabe hackear los surtidores de gasolina para que suministren el preciado combustible sin parar… y sin pagar. Lo etiquetan como «hacker» porque hay un mínimo de tecnología implicada...
Todo hacker ha oído la legendaria historia de que John Draper (Cap'n Crunch) descubrió a través de un amigo phreaker que en los años 70 los silbatos que se regalaban con las cajas de cereales Cap'n Crunch podían modificarse para emitir un...
Me topé vía algoritmo con este vídeo de YouTube que resulta ser un cuatro en uno, a cual más interesante, y que se deben corresponder con los extras del DVD de Juegos de Guerra (1983), la famosa película hackeril por excelencia,...

Por aquí somos muy fans del Juego de la vida de John H. Conway, hasta el punto de haber pasado días y días programando versiones y leyendo sobre sus infinitas curiosidades, variantes y relaciones con las matemáticas, especialmente gracias al gran...

De cracker a hacker: tras algunas condenas, fugas y aislamiento, uno de los mayores hackers de todos los tiempos montó una consultora y enseñó ingeniería social a empresas y organismos.

Wokwi es una fascinante herramienta consistente en un simulador de proyectos Arduino, que también sirve para microcontroladores ESP32 y STM32. Puede simular visualmente y mediante objetos y conexiones móviles las placas, cables y componentes y también ejecutar el código y mostrar...
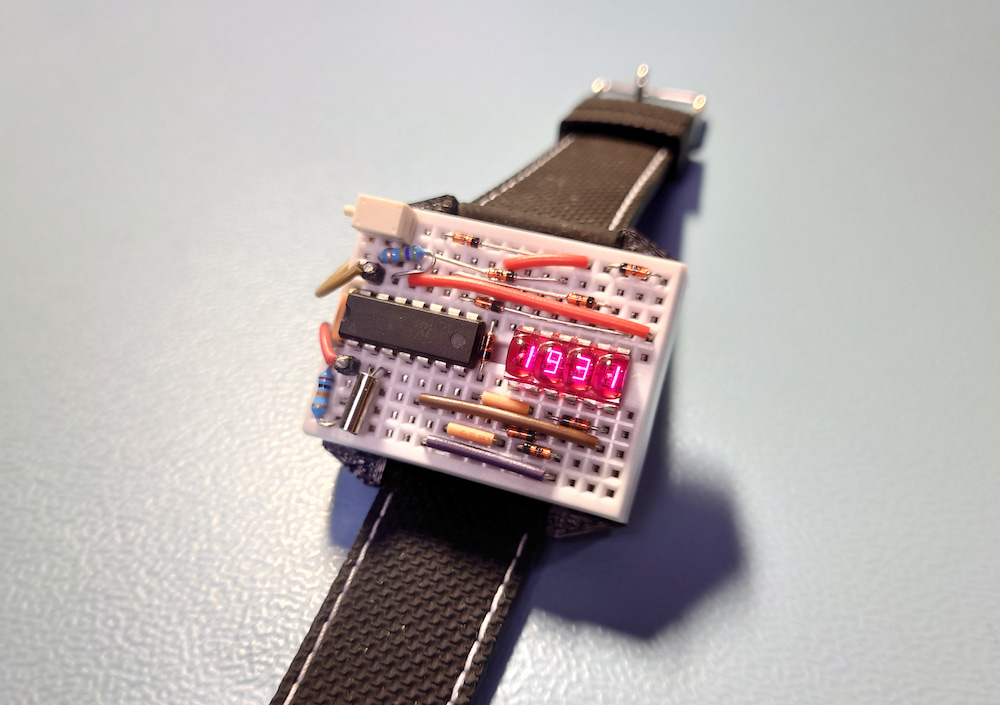
Me ha parecido total y absolutamente delicioso el Bread Board Wristwatch, un reloj de pulsera un poco brutalista, con sus componentes a la vista que puede ser un estupendo proyecto de fin de semana para practicar con la electrónica más sencilla....

La Beepberry es un proyecto de algo parecido a una Blackberry pero sin sus sofisticadas apps, sobria elegancia ni, por supuesto, Tuenti. Al ser un proyecto planeado para agosto de 2023 –aunque sus creadores dicen tener ya unas 50 unidades para...

Este cruel pero a la vez cachondo invento de un hacker-inventor, Joel, es nada más que y nada menos que un teclado de piano «eléctrico» que suelta zascas no menos eléctricos cuando te equivocas al interpretar una partitura (o, más exactamente,...

En su misión por «inventar, romper y usar incorrectamente la tecnología», este divertidísimo hacker tuvo la genial idea de crear un sistema de reconocimiento visual capaz de interpretar sus gestos para convertirlos en pulsaciones de teclado. Como bien aclara al principio,...

Que en el CERN trabajan gentes raras y peculiares no es ninguna novedad. Lo divertido es ver los inventos maravillosos en los que se meten, desde –ejem– una red global de páginas de hipertexto en los 90 a, en esta ocasión...
Shane Wighton, del canal Stuff Made Here, trabaja en proyectos tan largos como impresionantes. El último del que ha dado cuenta es la construcción de un mecanismo robótico para resolver puzles, pero puestos al tema, eligió la versión más difícil del...
¿Te imaginas ver Star Wars y que todos los láseres fueran reales y te pasaran por encima de la cabeza? Pues en esos consiste este experimento, que a falta de un nombre mejor han llamado mapeado láser o visionado aumentado /...

Si has echado de menos volar con todo esto de la pandemia y que las cosas todavía no van como iban antes siempre puedes recurrir al simulador de vuelo alternativo que ha diseñado y montado Alex Shakespeare. Lo de alternativo es...
Esta idea que enseña Alister de Playful Technology es genial: utilizar llaves de paso de grifería como potenciómetros analógicos conectados a una placa Arduino, que entonces puede controlar cualquier otro sistema sirviendo como una especie de tosco «mando» para el ordenador,...
Lennert Wouters, un hacker de la seguridad de la universidad belga KU Leuven ha hackeado los terminales de Starlink, esto es, el dispositivo que hace de router y que se instala en las casas junto con la antena para recibir y...

A Zack Freedman de Voidstar Lab se le ocurrió un curioso proyecto tras darse cuenta de que mucha gente prefiere ver los vídeos y películas con subtítulos en vez de sin ellos, por cualquier razón (dominio del idioma, dificultades de audición,...
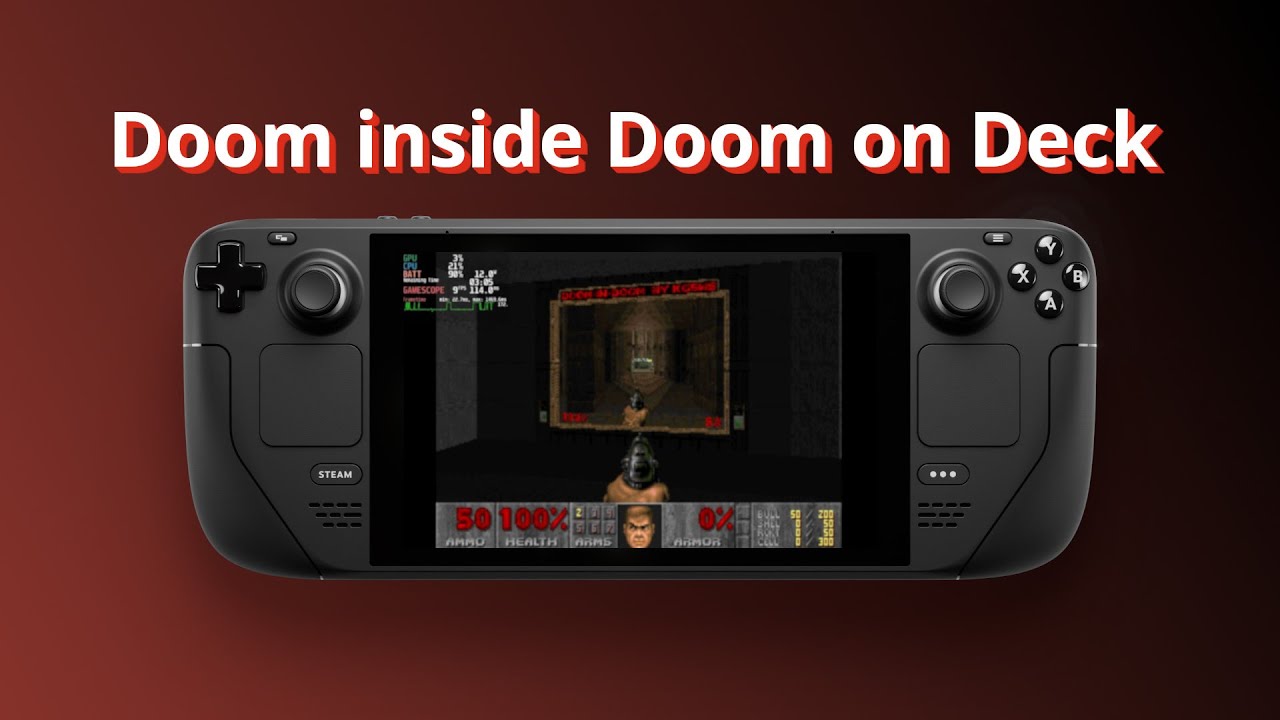
Alguien llamado kgsws tuvo la ingeniosa idea de hackear el código de Doom para que se pudiera ejecutar otro Doom dentro del propio juego. Esto añade un nivel de complejidad al famoso dicho «Doom se puede ejecutar en cualquier sitio» (calculadoras,...
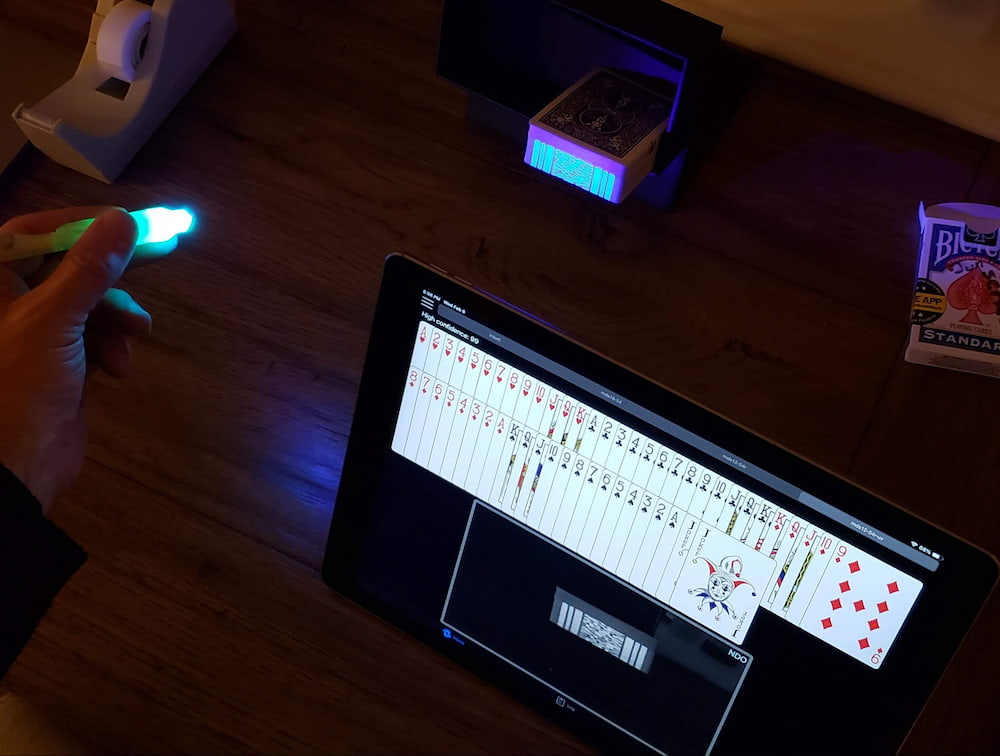
Este intrigante e ingenioso proyecto medio hackeril, medio mágico, medio para quedarte con el personal, se llama The Nettle Magic Project y es una especie de juego de magia con el ordenador que va más allá del típico «adivinar la carta»....
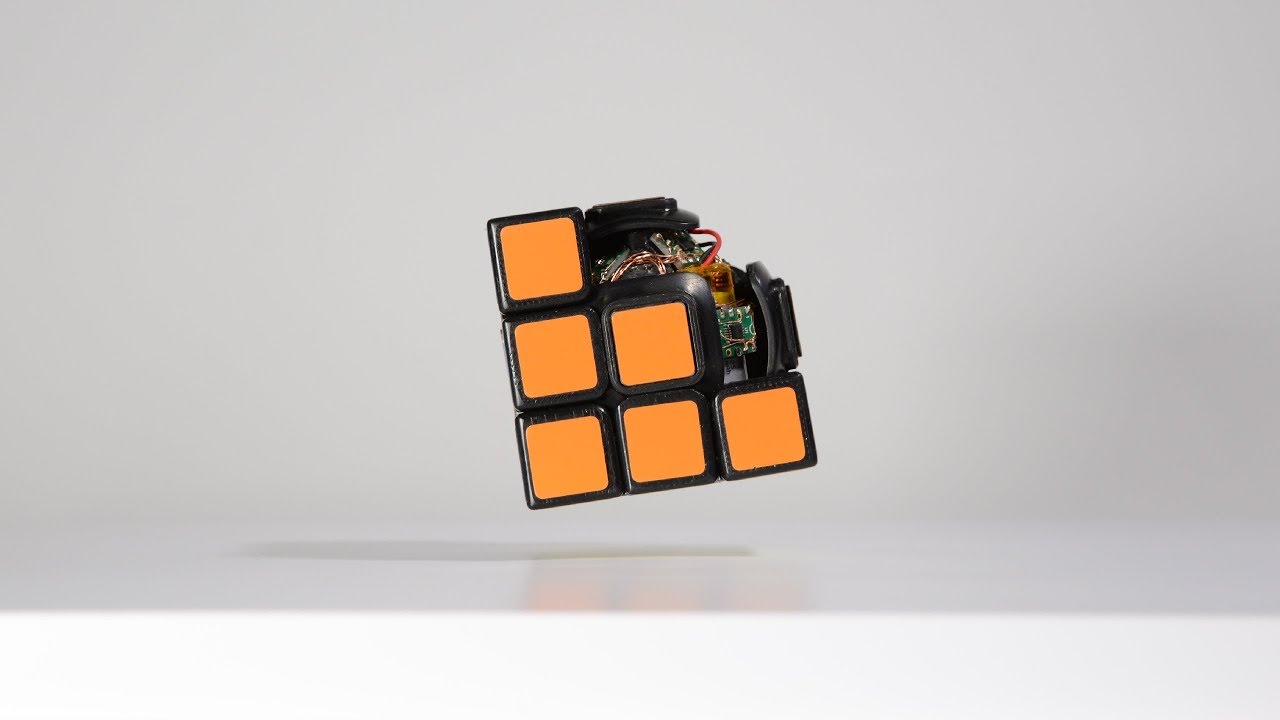
Parece que Human Controller ha superado el «más difícil todavía» construyendo un Cubo de Rubik que no sólo se resuelve a sí mismo, como pudimos ver hace unos años, sino que además, levita en el aire, flotando grácilmente mientras lo hace....

En The Science Elf explican cómo se puede construir una máquina del tiempo de Internet sumamente realista. Tan es así que Internet se convierte en la mítica «caja negra» de Roy y Maurice, de I.T. Crowd: tan sólo hay que enchufar...

Un contador diseñado para llegar a un gúgol muestra la imposibilidad práctica de alcanzar este gigantesco número en toda una vida, o incluso en la edad del universo.
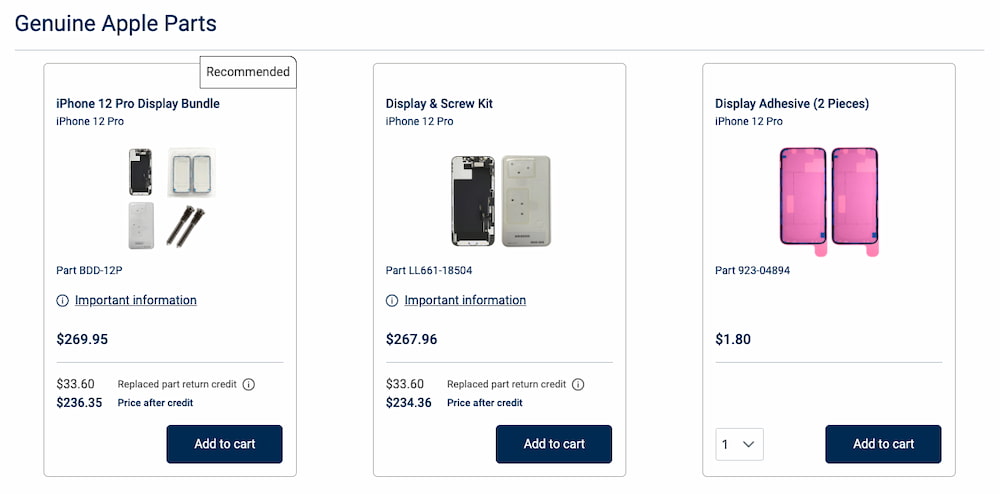
SelfServiceRepair.com es la tienda oficial de Apple –muy espartana y sin logos ni demasiada asociación con la compañía, porque lo gestiona otra entidad de momento «desconocida»– en la que ya se pueden comprar piezas y componentes oficiales para reparaciones de iPhones...
A través del mismísimo @Woz, que ha prologado el libro, descubrí la edición de este año de Hackers Movie Guide [PDF] de Steven Morgan y Connor Morgan, editado por Cybersecurity Ventures. Es una curiosa y completa enciclopedia del cine de hackers. Esto...
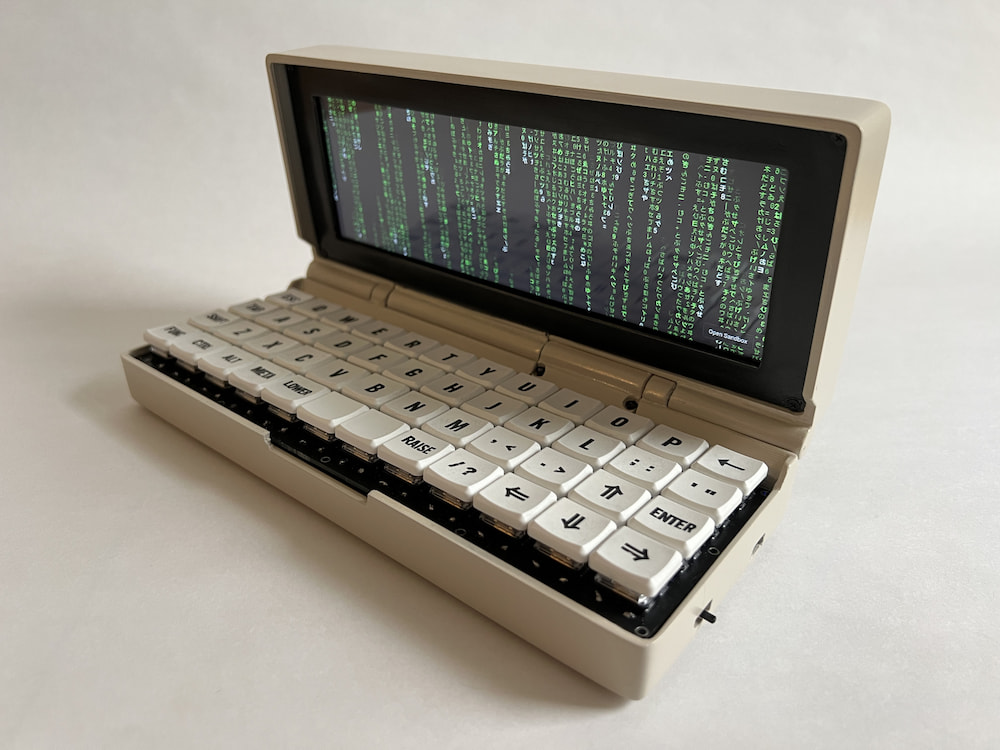
Este pequeño ordenador llamado simplemente Penkesu Computer es una creación de Penk Chen, usando una Raspberry Pi Zero 2 W con piezas impresas en 3D, otras recicladas de una Gameboy Advance SP, una pantalla de 7 pulgadas y 1280x400 y un...
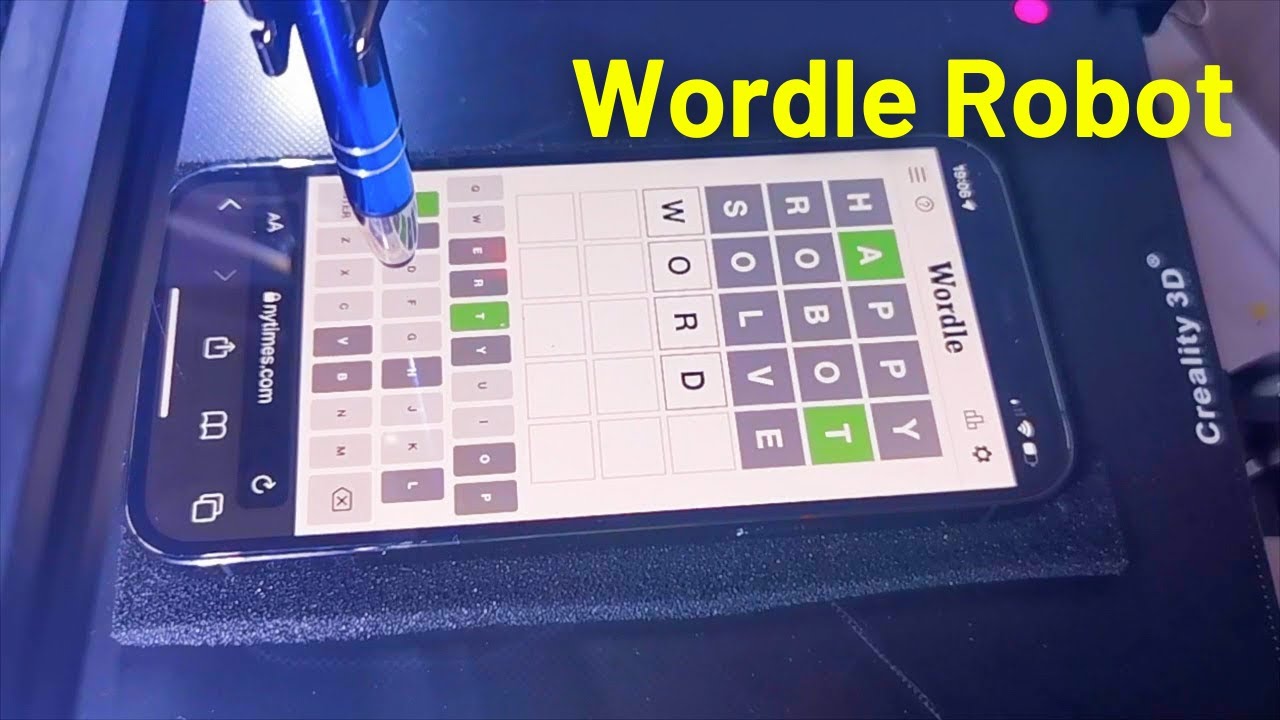
Demostrando que todo reto puede llevar a una solución estilo Rube Goldberg de extremada complejidad y nula practicidad, este simpático señor de Atomic14 ha creado un robot que resuelve el Wordle original directamente en la pantalla del móvil, elgiendo letra a...

Esta pequeña maravilla de Lucas Dul, un especialista en reparaciones de máquinas de escribir antiguas, se llama Proyecto Cyberdeck. Es una especie de ordenador retrofuturista, tan poco práctico que probablemente sería imposible trabajar con él más de un cuarto de hora…...

Este vídeo de Vije Miller es intrínsecamente divertido por el a) tono de presentador de documental viejuno y b) el aspecto de anuncio de teletienda… Aunque en realidad se refiere a un invento bastante interesante por no decir práctico: un contador...
La hacker, experta en seguridad y activista alemana Lilith Wittmann publicó un larguísimo artículo titulado Bundesservice Telekommunikation — enttarnt: Dieser Geheimdienst steckt dahinter («El Servicio Federal de Telecomunicaciones, desenmascarado: hay un servicio secreto está detrás») acerca de su investigación para conocer...

En este invento un tanto cafre hay unas cuantas cosas que podrían salir mal, pero realmente no sería para tanto. De modo que si juegas al golf y quieres probar algo diferente y prescindir del caddy, puedes fabricarte este carrito de...
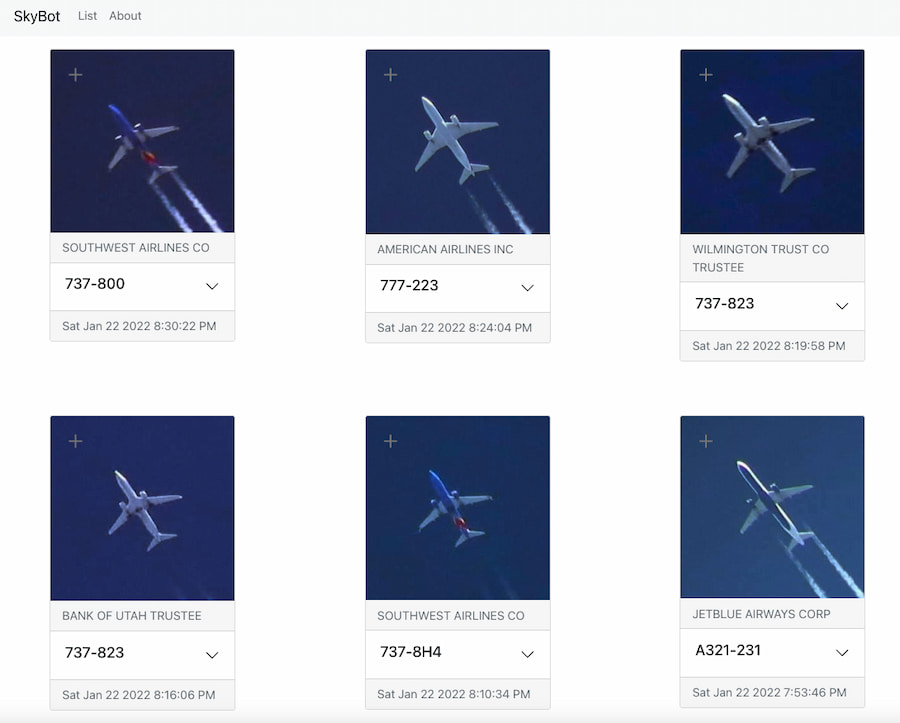
El SkyBot es un curioso invento de un aerotrastornado geek que consiste en una cámara que fotografía automáticamente todos los aviones que sobrevuelan su casa. Los resultados quedan además perfectamente encuadrados e identificados, con el nombre de la aerolínea, el modelo...
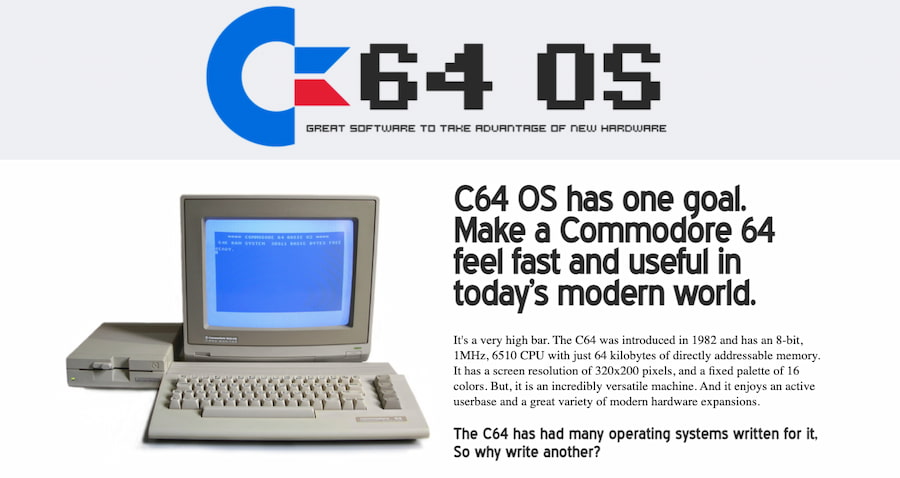
Gregory Nacu es un hacker autodidacta que adora los ordenadores antiguos y se ha embarcado desde hace tiempo en la extenuante y apasionante tarea de crear un sistema operativo «moderno» para el Commodore 64, al que ha llamado, apropiadamente, C64 OS....

En esta minibiografía de Altium Stories titulada Confesiones de un hacker conocido como Kingpin se narran las aventuras hackeriles de Joe Grand. Bajo el alias de Kingpin fue uno de los miembros más activos y jóvenes de L0pht (L0pht Heavy Industries),...
Si hubiera que hacer un Top 10 de inventos de la humanidad, la imprenta estaría sin duda en un alto lugar de la lista, junto con la rueda, la electricidad y algunos más. En estos 60 minutos de documental Stephen Fry...

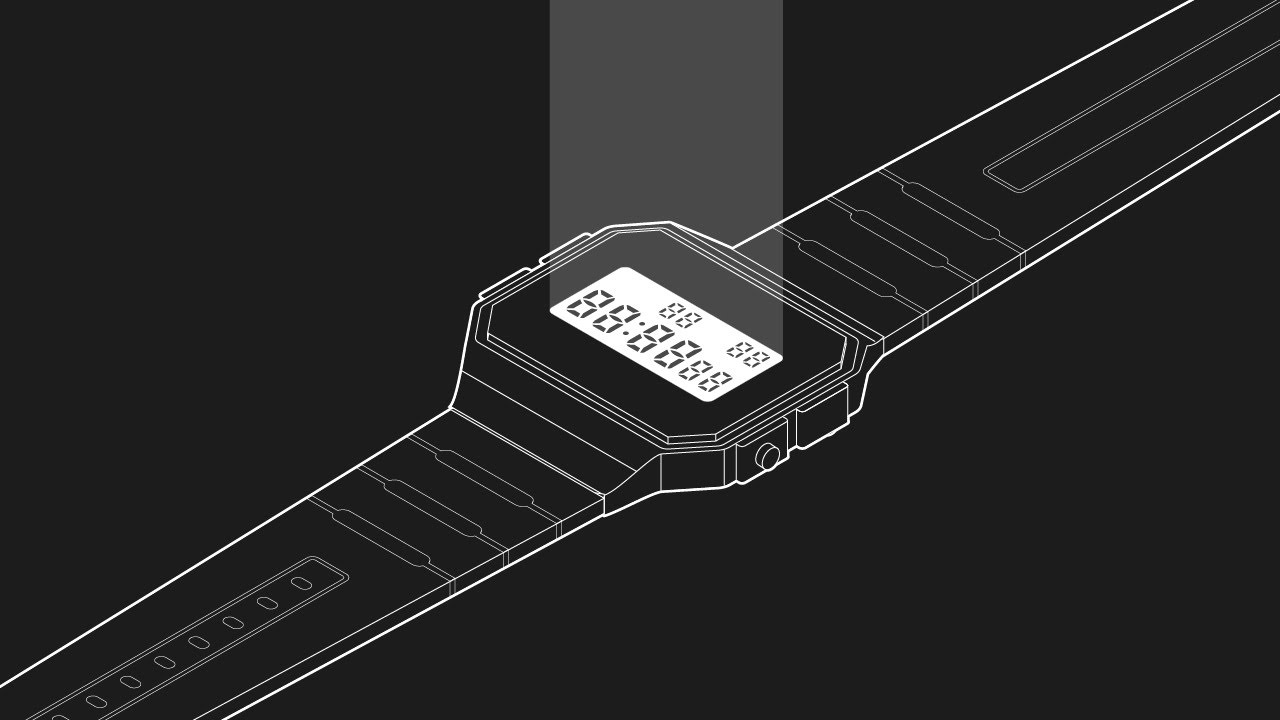
Este precioso proyecto de Joey Castillo permite modernizar los míticos y preciados relojes de pulsera Casio F-91W, unos curiosos objetos digitales vintage que salieron a la venta en 1989 y todavía se fabrican. La idea es utilizar una placa de la...
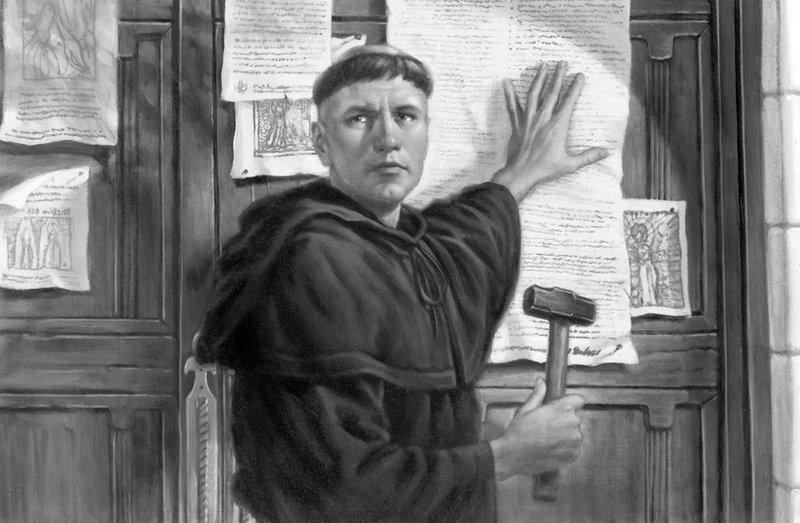
Desde que hace más de 500 años Martín Lutero se agarrara un cabreo monumental y clavara sus Noventa y cinco tesis en la puerta de la puerta de las iglesias de Wittenberg a modo de manifiesto de declaraciones o propuesta de debate...
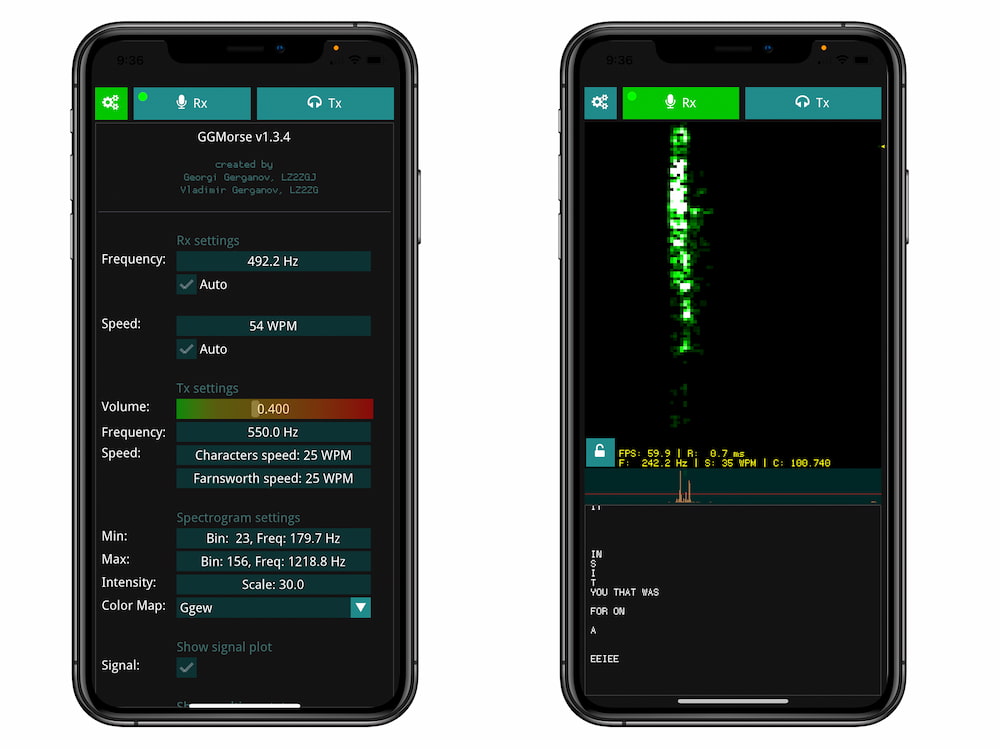
Eduardo nos habló de GGMorse, un transcriptor de código morse «en vivo» totalmente carente de utilidad real, pero suficientemente interesante, intrigante y obsoleto como para descargarlo y ver qué tal funciona. Además es de código abierto y se puede mirar cómo...
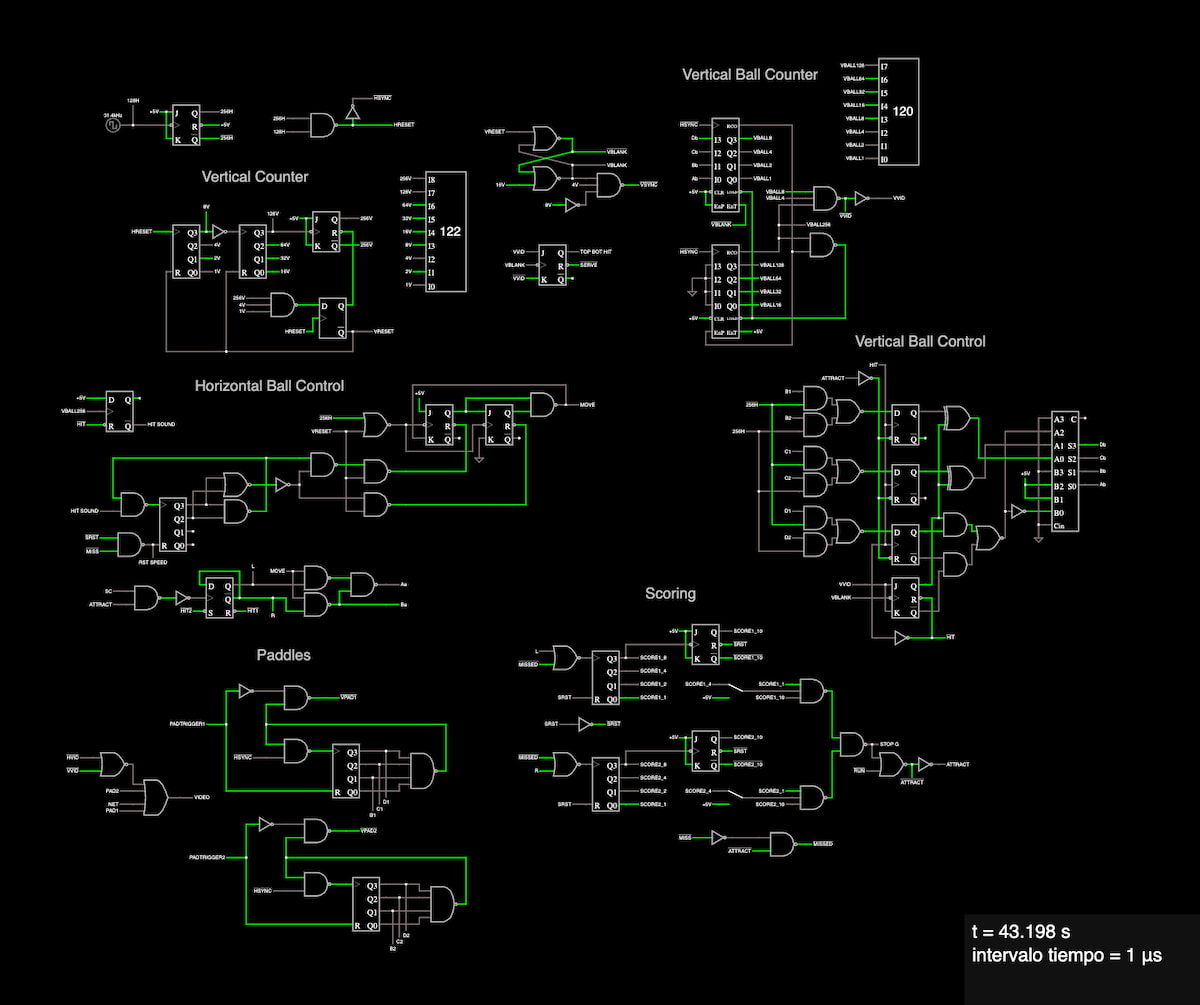
Tiene mérito esto: una recreación de Pong, uno de los más antiguos videojuegos, con circuitos electrónicos. Está basado en el juego original de Atari de 1972 y la recreación es bastante fiel: mandos analógicos que se pueden mover con el ratón,...

Esta juego de salón de máquinas recreativas llamado Speed of Light es antiguo, pero parece divertido para lo sencillo que es el planteamiento: las luces se van encendiendo una a una y quien las apague todas en el orden correcto va...

Steve Wozniak, «Woz», uno de los mayores hackers de la historia y co-fundador de Apple, nos habla en este vídeo del canal de YouTube del Repair Preservation Group con sabias palabras acerca del derecho a reparar. Naturalmente, aprovecha para colar unas...
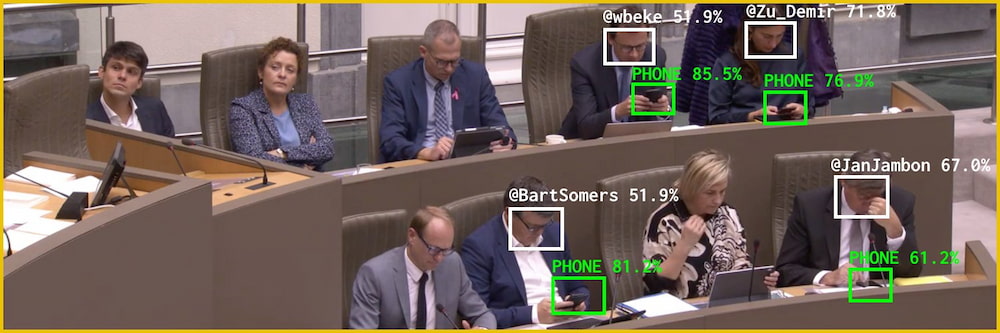
Dries Depoorter es un hacker que ha creado una combinación definitiva y letal para los políticos adictos al móvil y que ha llamado The Flemish Scrollers (algo así como «los flamencos que hacen scroll»). Consiste en capturar las retransmisiones en vivo...

Este invento de Karayaman tiene mucho de ingenioso y hackeril: consiste en un software escrito en Python que permite jugar al ajedrez contra el ordenador pero utilizando un tablero de verdad. La clave es usar técnicas de reconocimiento visual y una...
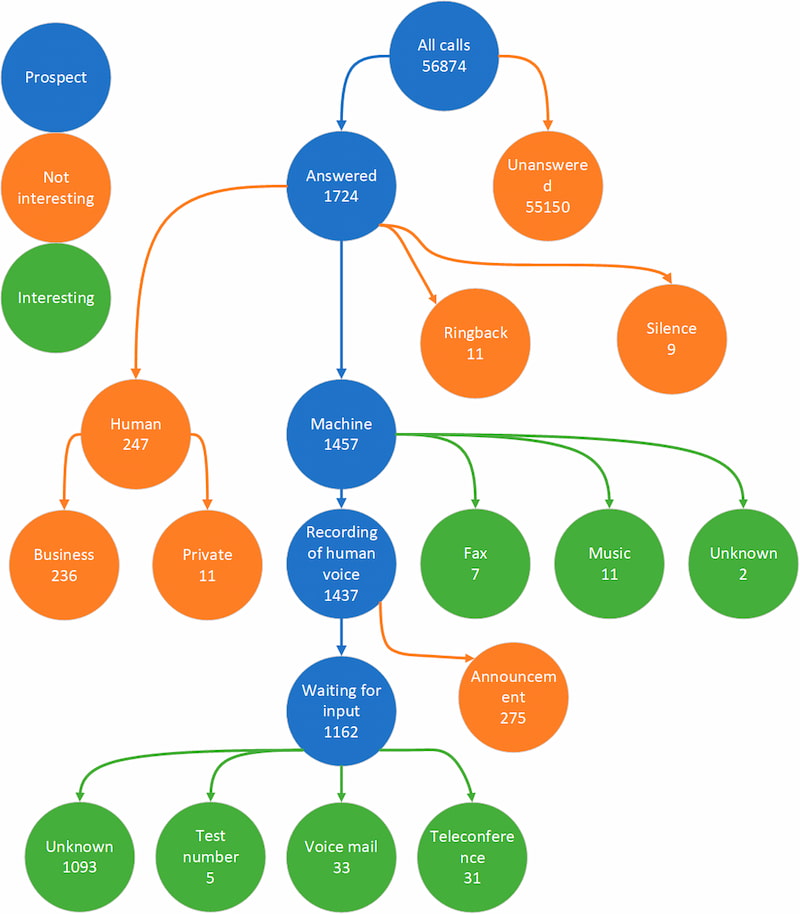
Un hacker y experto en seguridad finlandés ha probado a hacer más de 56.000 llamadas a la red telefónica grabando las respuestas para luego analizarlas y ver si encontraba «algo interesante». Espíritu hacker en su máxima esencia. Esta legendaria técnica se...

Teléfono ANOM – Policía australiana En 2018 el FBI cerró un servicio de comunicaciones cifradas llamado Phantom Secure que era muy popular entre criminales de todo el mundo. Y viendo una oportunidad reclutaron a un ex distribuidor del servicio que estaba trabajando...

Conseguí encontrar la web del proyecto XUAN y este vídeo de un joven ingeniero, hacker e inventor de artilugios, Peng Zhihui donde se puede ver su bicicleta autónoma XUAN (de eXtremely Unnatural Auto-Navigation). Es tan fácil de explicar como lo que...

Alex cuenta en su canal de YouTube AirtagAlex algunos de sus experimentos con los Airtags de Apple, esos pequeños dispositivos de rastreo que resultan útiles para encontrar las llaves, la mochila o el bolso. Como buen hacker, se puso a explorar...

El PiDP-11 – Oscar Vermeulen El PiDP-11, diseñado por Oscar Vermeulen, reproduce un PDP-11/70 de 1975 a escala 6:10. Bueno, reproduce la consola desde la que se encendía y apagaba y se podía hacer la depuración de programas examinando posiciones de memoria...

Este invento es un «tercer ojo» para el phono sapiens, un invento que nos permite caminar de forma segura mientras caminamos sin separar la vista de nuestros teléfonos inteligentes. Minwook Paeng es una estudiante del Royal College of Arts de Londres...

Joe Grand es un ingeniero y hacker que ha inventado y construido esta brújula de pizza, que básicamente hace lo que su propio nombre indica: en vez de apunar siempre al Norte apunta a algún lugar en el que conseguir una...

En el canal de ScottBez hay una breve pero detallada e ilustrativa explicación de cómo funcionan los paneles de caracteres split-flap. Estas pantallas en las que letras y números electromecánicos giran y hacen el característico y encantador sonido flap-flap-flap cuando se...

Este invento de Zip Zaps es un mecanismo que permite escribir al dictado mediante reconocimiento automático de voz en una vieja máquina de escribir Smith Corona Galaxie Twelve de 1973. Es tan sencillo –o tan complicado– como suena. El resultado es...

Me crucé con una referencia a las -2000 líneas de código de Bill Atkinson [en la foto, el que sujeta el Macintosh] que está archivada Folklore.org y data de 1982. Es divertida y aunque conocía el contexto no la había visto...

Iván nos escribió para contarnos que había construido un Pong para Arduino Uno, al que ha llamado cariñosamente PongDuino. Nos envió un vídeo del prototipo y unos días después toda información y enlaces. Lo hemos editado con su colaboración para publicarlo...
26 FEB 2021

Un grupo de ingenieros de la NASA que en el MundoReal™ trabajan en el equipo de la Estacion Espacial Internacional (EEI) ha diseñado ISS Mimic, un modelo de ella que se puede imprimir en 3D y animar mediante Arduino y unos...
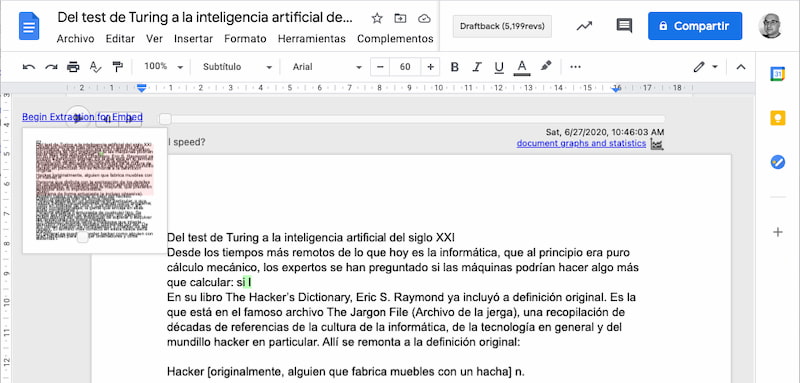
Existe una extensión de Chrome llamada Draftback creada por James Somers, un desarrollador que sintió curiosidad por el funcionamiento de Google Docs allá por 2014. Si se instala en el navegador al abrir cualquier documento de Google Docs aparece como un...

Matthias Wandel es un hacker de la madera y los mecanismos ingeniosos que construyó hace tiempo esta escalera mecánica de madera de forma totalmente artesanal. Está pensada para que un simpático Slinky pueda recorrer sus escalones. Si se hace con habilidad...
Uno de nuestros eventos favoritos para inventores piraos, científicos locos y hackers de todo pelaje, la Maker Faire, celebrará su próxima edición Maker Faire Galicia completamente online, del 18 al 22 de noviembre. Es la sexta edición del conocido evento para...

Este curioso invento un poco al estilo portal de Stargate es un Auto-calendario Críptico que combina los principios de otros dos inventos similares: el Calendario Perpetuo Automático y el Calendario Críptico. Los signos raros e indescifrables cobran sentido cuando pasan a...

La Raspberry Pi 400 es una nueva versión del famoso miniordenador educativo y para cacharreo en «formato teclado», todo en uno; una especie de Raspberry Pi «en formato Commodore», que decía Víctor. Además de su indudable atractivo por un diseño y...

En la web de Relativty dos auténticos hackers quinceañeros explican cómo construyeron sus propias gafas de realidad virtual por unos 200 dólares (~170 euros) y cómo cualquiera puede imitarlos y entretenerse en un proyecto chulo, chulo. Las características principales de las...

Desde tiempos inmemoriales hackers y programadores han utilizado foo y bar como variables de ejemplo al escribir su código o hablar sobre él. Es lo que «técnicamente» llaman variables metasintácticas: algo para representar entidades desconocidas, sea eso lo que sea. Algo así...
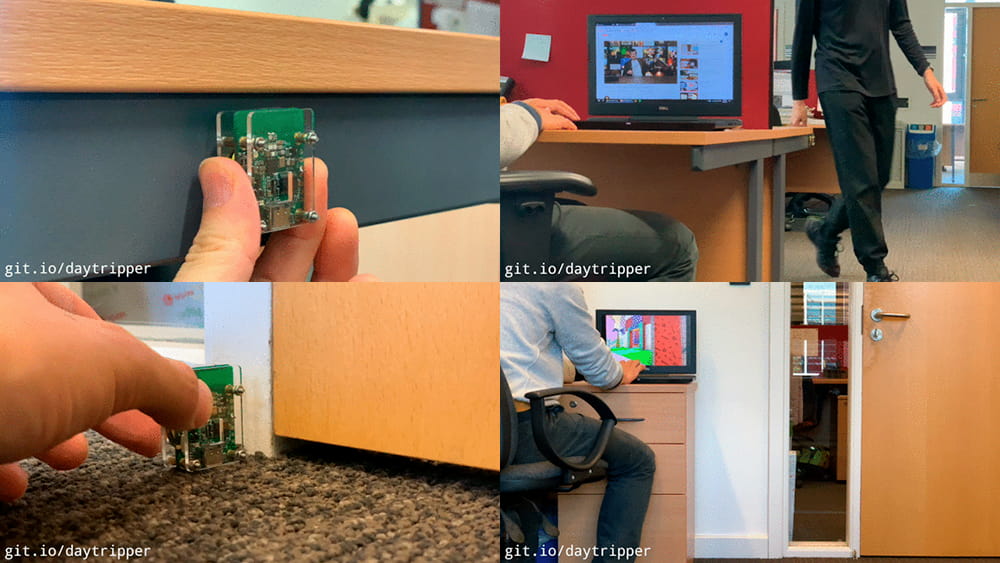
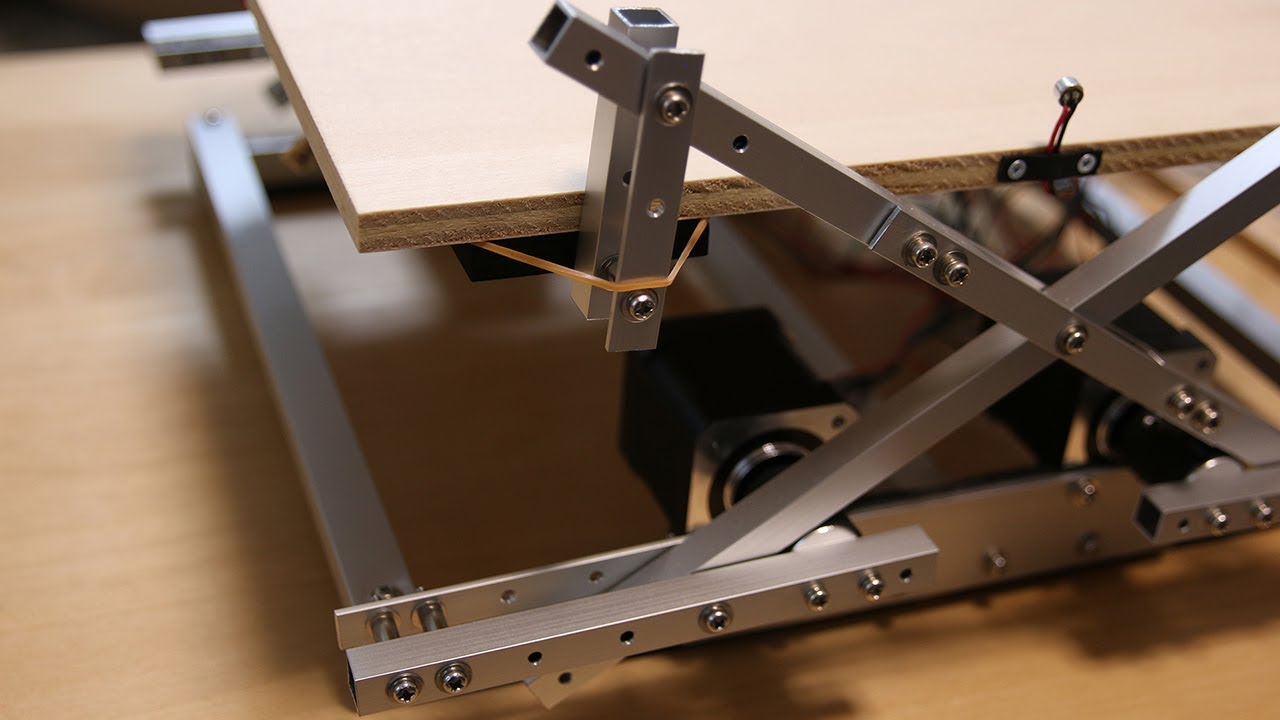
Tan ingenioso como práctico y simpático, Daytripper es un invento que será muy apreciado por quienes trabajan en oficinas, cubículos y otros «puntos de engorde» de las empresas de hoy en día. Es básicamente un detector láser a modo de cable‑trampa...

McGyver asentiría orgulloso al ver todos los usos ingeniosos de los mundanos clips que han recopilado en este vídeo de Interesting Engineering. Y es que no sólo sirven para juntar papeles. Entre otras cosas se pueden usar como: Abrefácil para cinta...

Dominik Jašek y Ondřej Sláma del Instituto de Automatización e Informática de la Universidad Técnica de Brno (República Checa) han construido este curioso e invencible «robot de hockey de aire» que (casi) nunca pierde. Se parece en espíritu a un invento...

A MatKC un día le asaltó la duda de si sería posible meter un programa en un código QR. A fin de cuentas un QR no deja de ser un «dispositivo» de almacenamiento. Así que en Can you fit a whole...

Las máquinas de Rube Goldberg que hacen cosas sencillas de una forma complicada son algo que nos encanta por aquí. Las hemos visto servir como juegos, protagonizar escenas absolutamente inútiles e incluso en anuncios anuncios. Uno de nuestros inventores de estos...
Esta pequeña maravilla que todo geek que se precie desearía poseer se llama Data Runner y es el mítico reloj de pulsera digital Casio F-91W modificado cual gadget de James Bond. Pero, como diría Superratón, es un Casio «supervitaminado y mineralizado»....
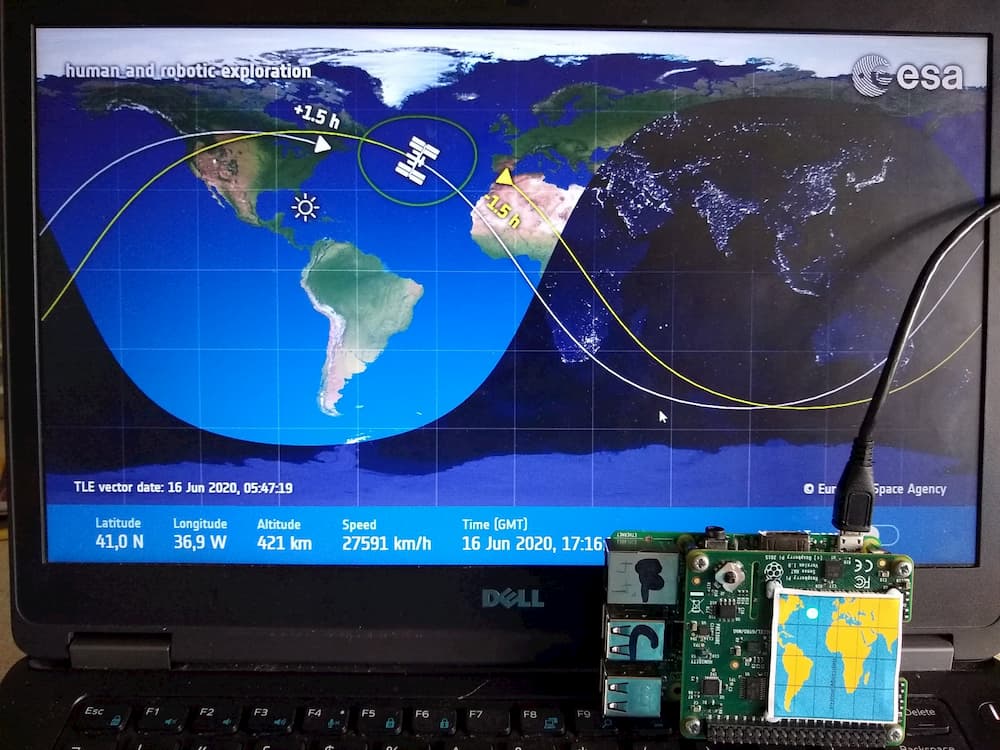
El mapa en acción – John Chinner John Chinner, un ingeniero de hardware de Airbus Space, se dio cuenta de que tenía un Sense Hat para Raspberry Pi medio muerto de risa. Y pensó que podría darle uso fabricando el mapa de...

Ken Shirriff, de quien conocemos otros proyectos como el estudio del chip de sonido de Space Invaders o el del Intel 8008 se ha entretenido explicar la ingeniería inversa del chip de sonido de la Game Boy Color, la famosa miniconsola...

La gente de Raspberry ha anunciado que ya está disponible la nueva Cámara de alta calidad Raspberry Pi. Se trata de una minicámara para montar en los kits de Raspberry Pi, un sensor Sony IMX477 de 12,3 megapíxeles, de tan solo...

Tal y como explica Greg Egan (sí, el autor de novelas de ciencia-ficción, que además de ser informático también sabe mucho de matemáticas) es sabido que en una elipse una trayectoria recta que pase por uno de los focos y «rebote»...
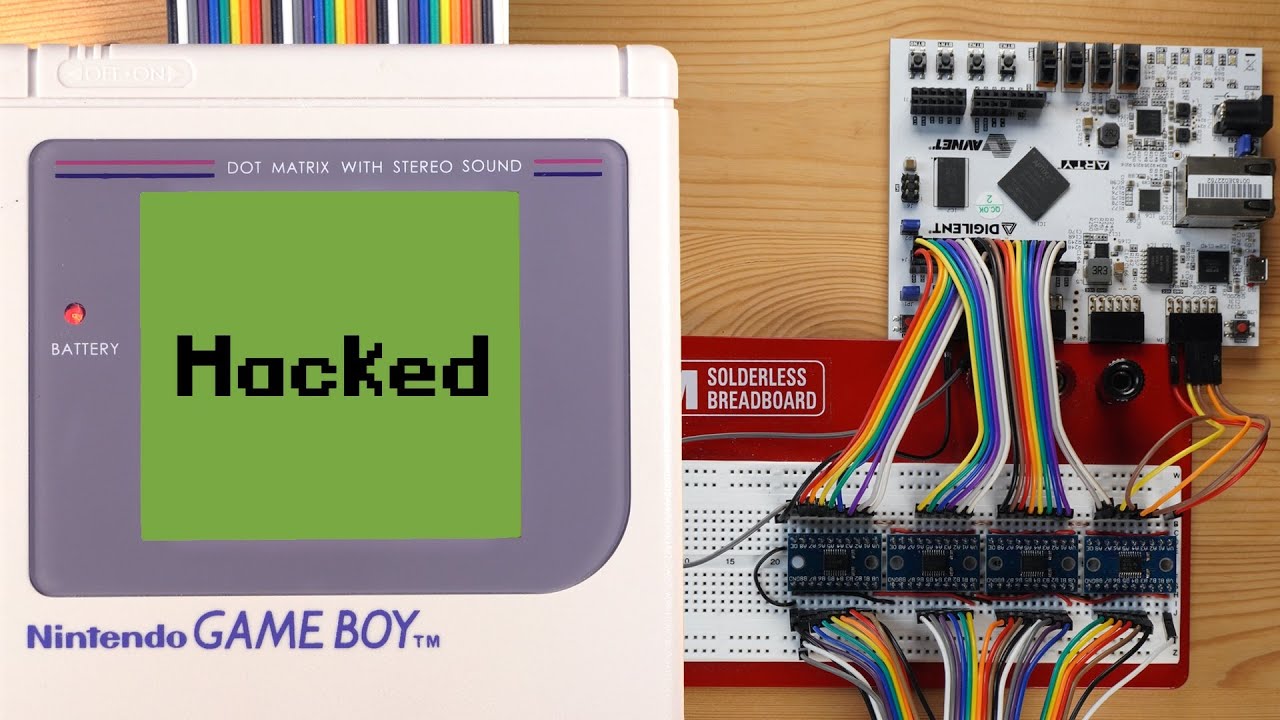
Las Game Boy de Nintendo (1989) tenían un peculiar sistema de protección para que sólo se pudieran utilizar en ellas cartuchos debidamente licenciados por la compañía. Aun así los desarrolladores independientes investigaron sus entresijos y descubrieron cómo hackear el ingenioso sistema...
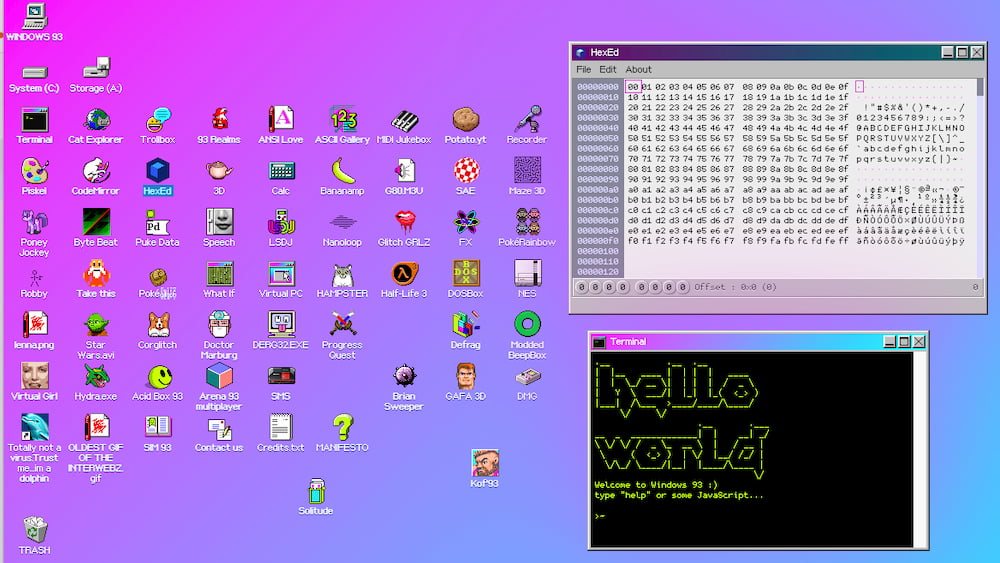
Windows93.net es un curioso entretenimiento experimental obra de Jankenpopp –un músico, artista y hacker– quien ha trabajado en su creación junto con un amplio elenco de hackers que han programado los diversos componentes, diseños, animaciones y música. Es difícil de explicar...

La Octo-Bouncer (que podríamos traducir como Octo-botadora) es la última encarnación que han publicado en Electron Dust sobre su máquina para hacer equilibrios con una pelota de ping-pong. En el canal hay cinco años de vídeos mostrando la evolución del invento....

El DSTIKE Deauther Watch V2 es un reloj de pulsera tosco y un poco ciberpunk. No tanto por los componentes, que son más bien modernillos sino por el aspecto y su definitiva practicidad: es una placa ESP8266 con su pantalla de...

Este teléfono móvil con disco de marcar es completamente funcional; su principal característica es el disco de marcar, en cuyos dígitos hay que meter los dedos y darles vueltas esperando al raka-raka-raka cuando el muelle devuelve el mecanismo a su posición...
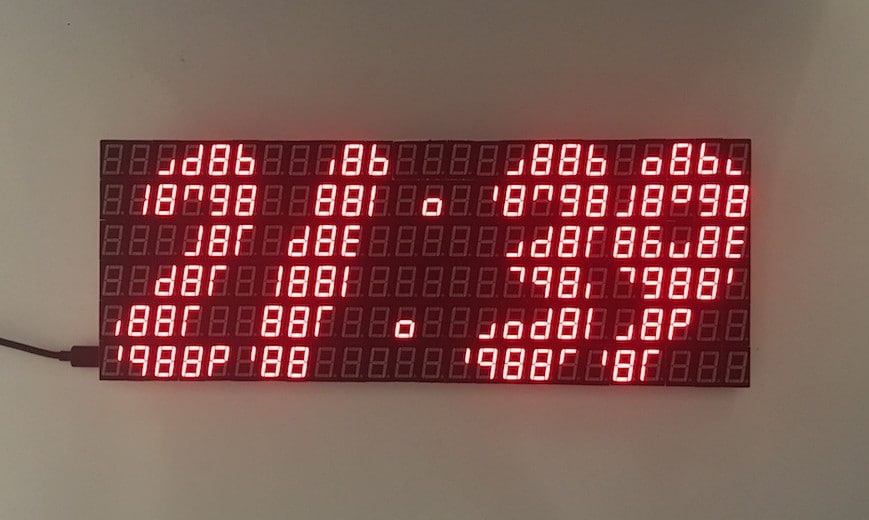
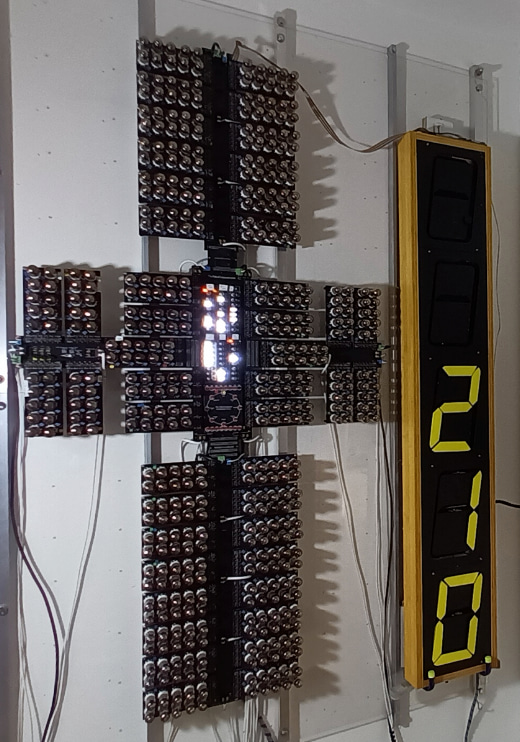
En el blog de Arduino se encontraron con este simpático reloj hecho con 144 displays de 7 segmentos, que un usuario de Reddit llamado Krukerfluk dio a conocer con algunas imágenes y detalles sobre su funcionamiento. En una de las versiones...

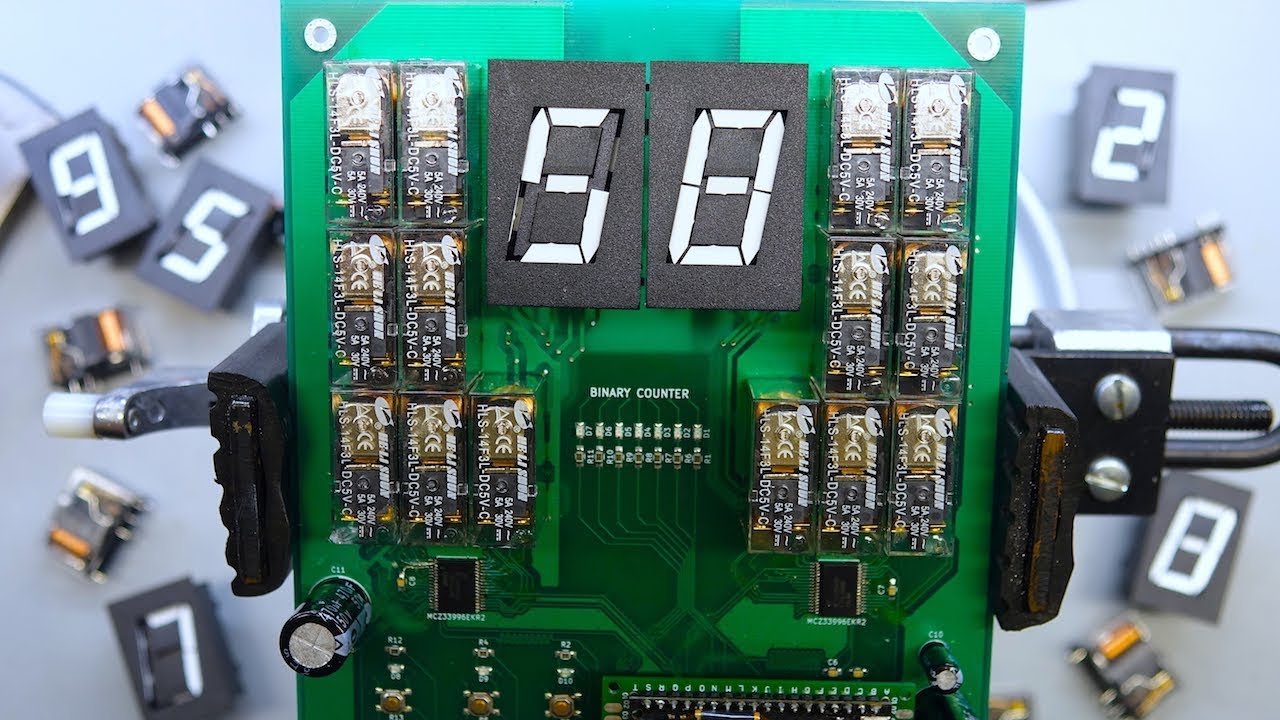
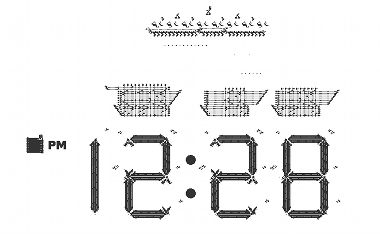
Una icónica escena de Wargames (John Badham, 1983) nos mostraba un display alfanumérico del superordenador W.O.P.R. (War Operative Plan Response) utilizando la fuerza bruta para adivinar los códigos de lanzamiento de los misiles termonucleares del arsenal de los Estados Unidos. Seamos...
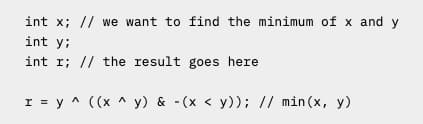
int x; // we want to find the minimum of x and y int y; int r; // the result goes here r = y ^ ((x ^ y) & -(x < y)); // min(x, y) En la página Bit Twiddling Hacks...
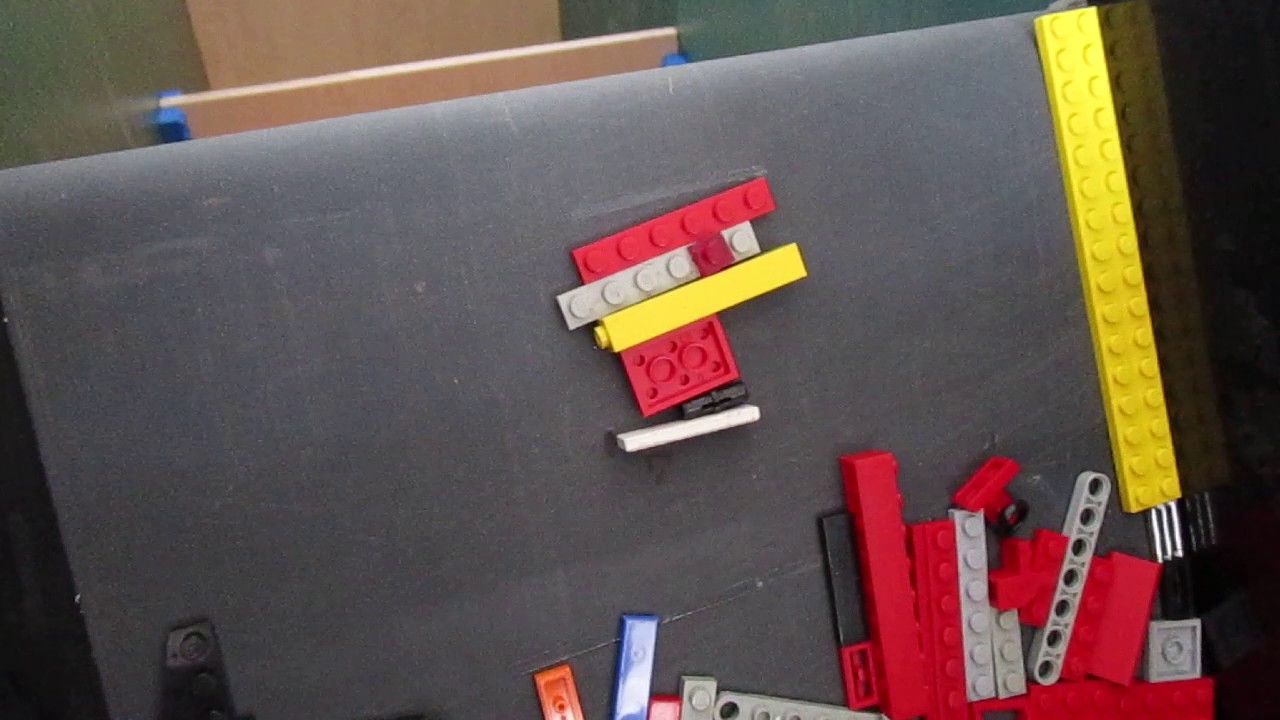
Daniel West ha desarrollado esta máquina de Lego capaz de ordenar piezas de Lego. La llama «Máquina Universal» porque puede clasificar unas 3.000 piezas diferentes mediante técnicas de visión e inteligencia artificial, como hacen las máquinas de muchas fábricas y almacenes....
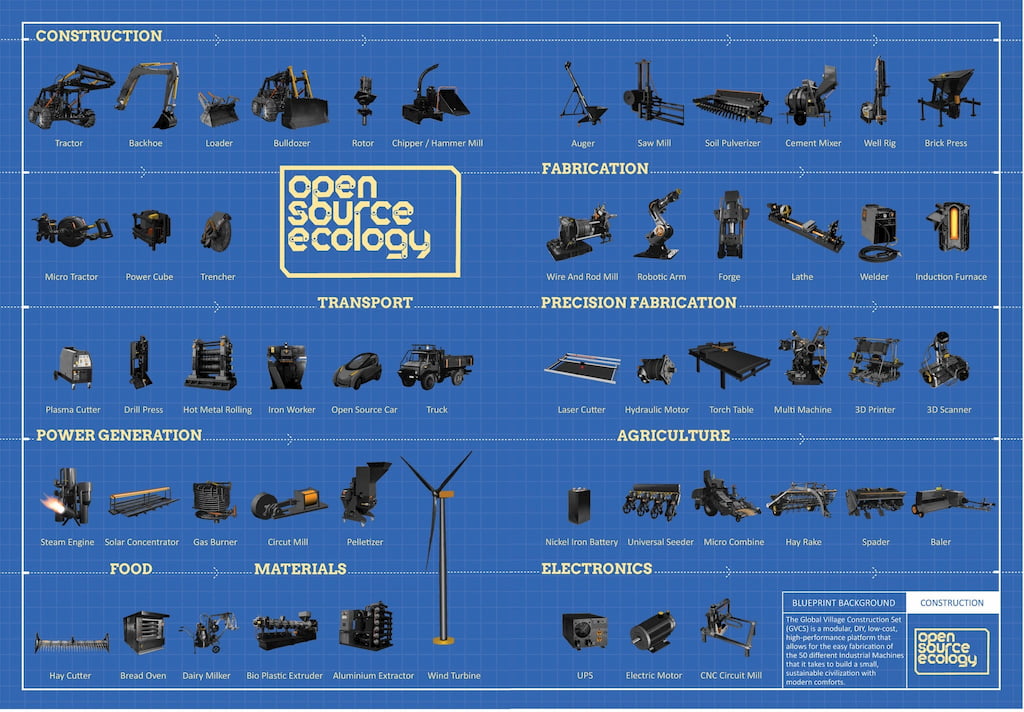
Marcin Jakubowski estudió física pero decidió dedicarse a asuntos más mundanos y prácticos. Comprobó lo increíblemente dura que es la vida del granjero y hace unos años decidió aplicar sus conocimientos para crear un grupo llamado Open Source Ecology para diseñar...
Hay que reconocer que para el pedazo de truño de película que era la cinta de Stallone Demolition Man (Marco Brambilla, 1993) nos legó dos chascarrillos importantes para la cultura nerd de la ciencia-ficción de baratillo: las multas instantáneas por violación...

Tiene mérito lo de Device Orchestra porque consigue hacer música con instrumentos de lo más variopinto, en este caso un par de datáfonos en los que suena la banda sonora de Super Mario Bros. Pero también sabe sacarle partido a otros...

Yo de pequeño quería ser inventor. Tal vez por eso me haya resultado especialmente entrañable este vídeo de SciFri acerca de Little Inventors, una organización sin ánimo de lucro que se dedica a hacer realidad los inventos de niños y niñas....

Me crucé con el canal de Lock Picking Lawyer, un recurso informativo estupendo y con vídeos de calidad acerca del educativo y siempre interesante mundo de las cerraduras y sus vulnerabilidades. Contiene cientos de vídeos cortos (la cuenta va por 894)...

Esta preciosidad es un helicóptero «de Lego» fabricado por Adam Woodworth. Si todavía te estás quitando las legañas del lunes por la mañana puede que te quedes un poco asombrado, porque vuela de verdad. Mirándolo con un poco más detalle se...

Este vídeo titulado Un riesgo que merece la pena correr que el inventor Richard Browning de Gravity ha preparado para la campaña Born to Engineer es un excelente repaso a la historia de su jetpack, el Dédalo (técnicamente: Daedalus Mk. 1...
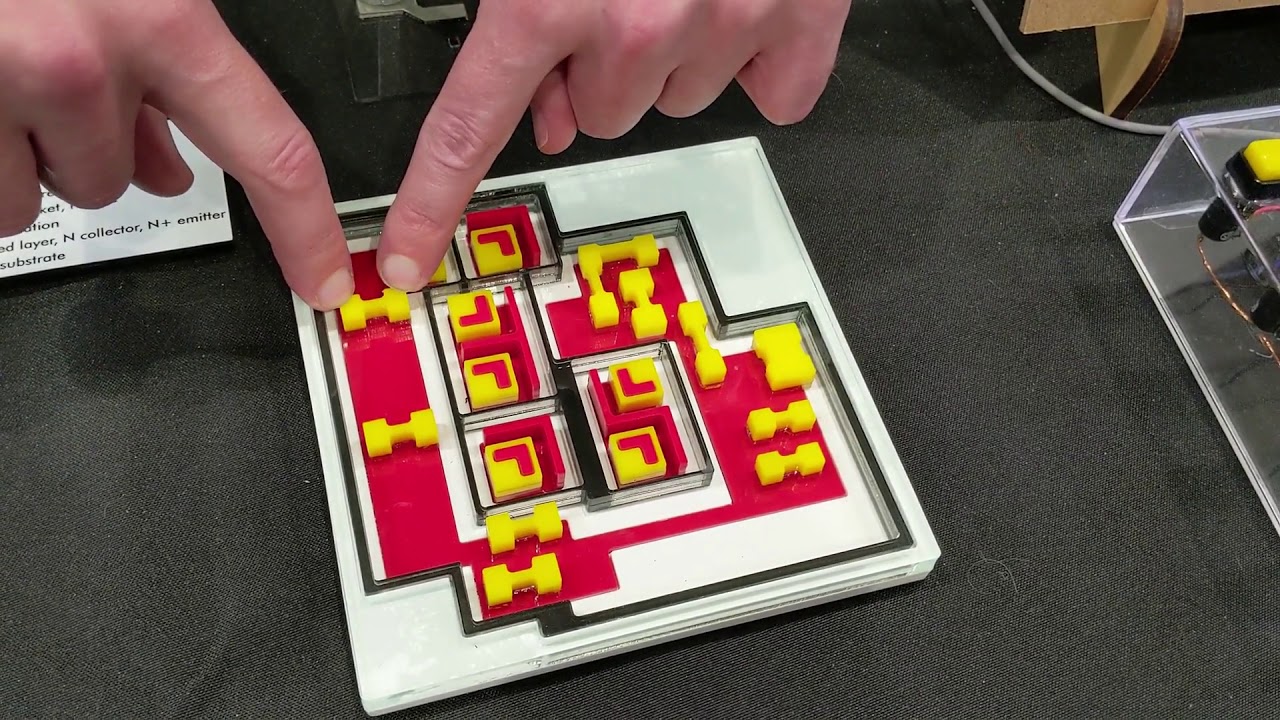
En la última Maker Faire un equipo de hackers enseñó este proyecto consistente en un circuito integrado gigante ideado para explicar a los más pequeños cómo funciona este tipo de componentes electrónicos. El montaje es una gigantesca placa de material acrílico...
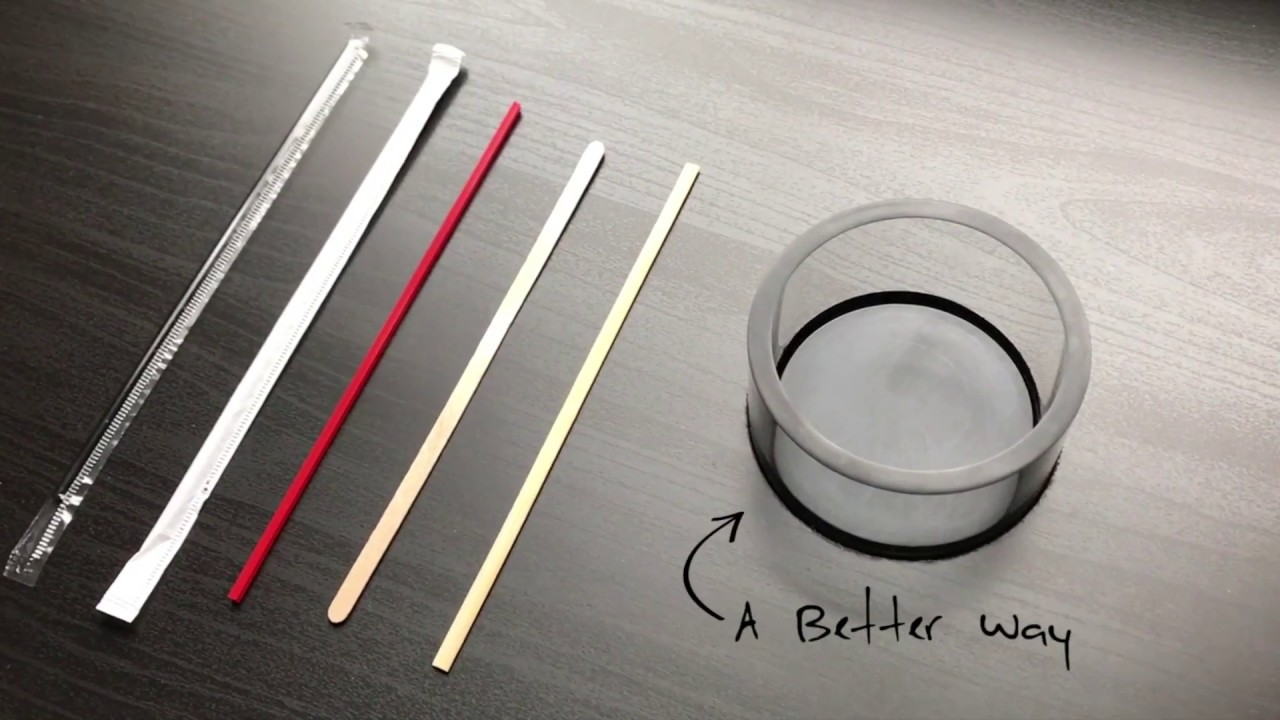
El Stircle es un agitador de bebidas «mejor», que hace bueno aquello de que «si la montaña no viene a Mahoma puede ser Mahoma el que vaya a la montaña». En este caso en vez de dar vueltas al café con...
Zoe ha inventado el WebTuner, una forma de hacer más cómodo (o no) algo tan habitual como cambiar de pestaña en el navegador. El invento es una rueda mecánica, como las de los mandos de sintonía de una radio analógica, que...

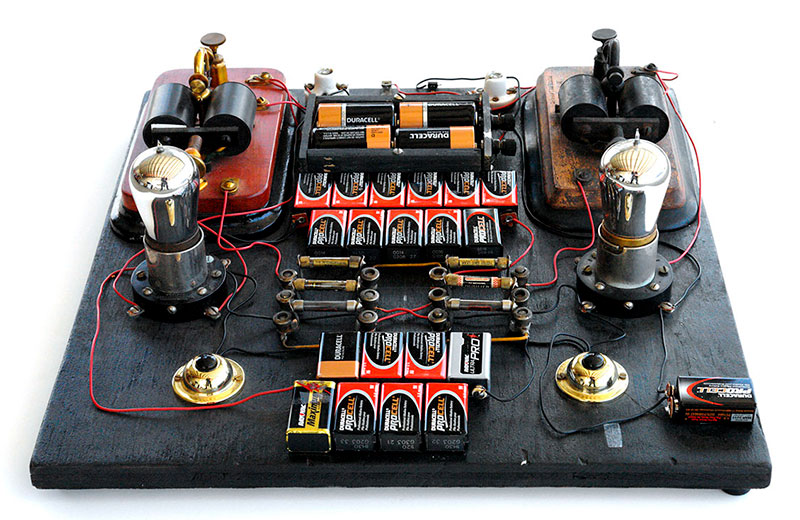
Estos curiosos experimentos de Mr. Michal sirven tanto para fabricar trenecitos y pistas de carreras con pilas normales y corrientes (o baterías recargables) como para comparar cuál parece ser más poderosa por su carga/rendimiento. Todo lo que se necesita es: Cable...

La SPUDwrite (de Single Purpose User Device, «dispositivo de un solo uso») es una especie de invento de esos que «hacen algo fácil de forma complicada». Básicamente es una máquina de escribir. Pero en vez de utilizar cualquier dispositivo con un...
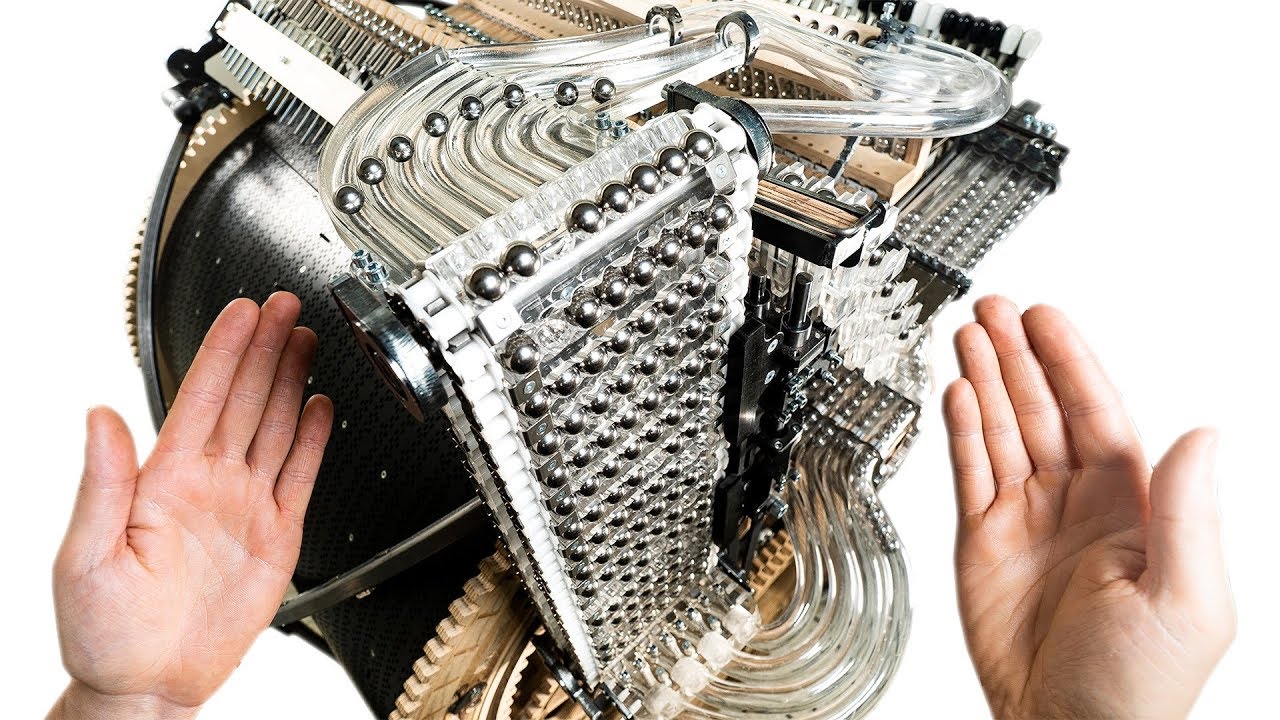
Este curioso invento se llama Máquina de Canicas X y tal y como cuentan en el canal de Wintergatan, combina «música, ingeniería e innovación». Pero sobre todo resulta hipnotizante y a la vez un tanto intrigante, al tiempo que transmite calma...

Este invento de Shy Vardi es una curiosa máquina con aspecto de haber salido de un laboratorio de científico loco, pero lo importante es que ¡funciona! Está fabricada principalmente con piezas recicladas de impresoras, una buena forma de darles una vida...

He aquí un huevo normal y corriente que está recubierto de pigmento fotocromático. Se monta sobre el EggBot –un mecanismo CNC que lo mueve de forma muy precisa– y entonces un rayo láser violeta va dibujando la hora exacta. El pigmento...
Este vídeo del canal Electron Dust está grabado a lo largo casi 4 años. Muestra cómo fue la evolución de un invento para mantener una pelota de ping-pong en continuo movimiento sobre una tabla/raqueta, utilizando micrófonos y sensores ópticos. Idea a...
En Future Founders preguntaron a niños y niñas de entre 6 y 11 años qué inventarían para hacer del mundo un lugar mejor. A partir de una breve descripción artistas adultos los convirtieron en inventos más detallados. De este modo ha...

El WiPhone que ya ha alcanzado la financiación colectiva en KickStarter es un teléfono móvil que funciona por VoIP, así que no necesita un contrato ni una tarjeta SIM, porque sólo funciona mediante una conexión wifi. Se autocalifica de minimalista y...

En el canal Tested de Adam Savege (uno de los Cazadores de Mitos) tienen esta historia acerca de Matt Sengbusch, que trabaja en la restauración artesanal de videojuegos antiguos en lo que llama Small Change Arcade. Las máquinas son exactamente igual...

A simple vista se diría que es un juguetito a escala pero… ¡qué demonios! Es un rover tamaño real con un diseño limpio y elegante, en el que pueden montarse los más pequeñajos de la casa, quizá de hasta 3 o...

Este invento quedó finalista en el concurso de tecnología InVenture 2019 que organiza la Universidad de Georgia Tech. Se llama HANDLD y básicamente es una cámara y sensores instalados en las bicicletas que circulan por calles y carreteras. Si un vehículo...
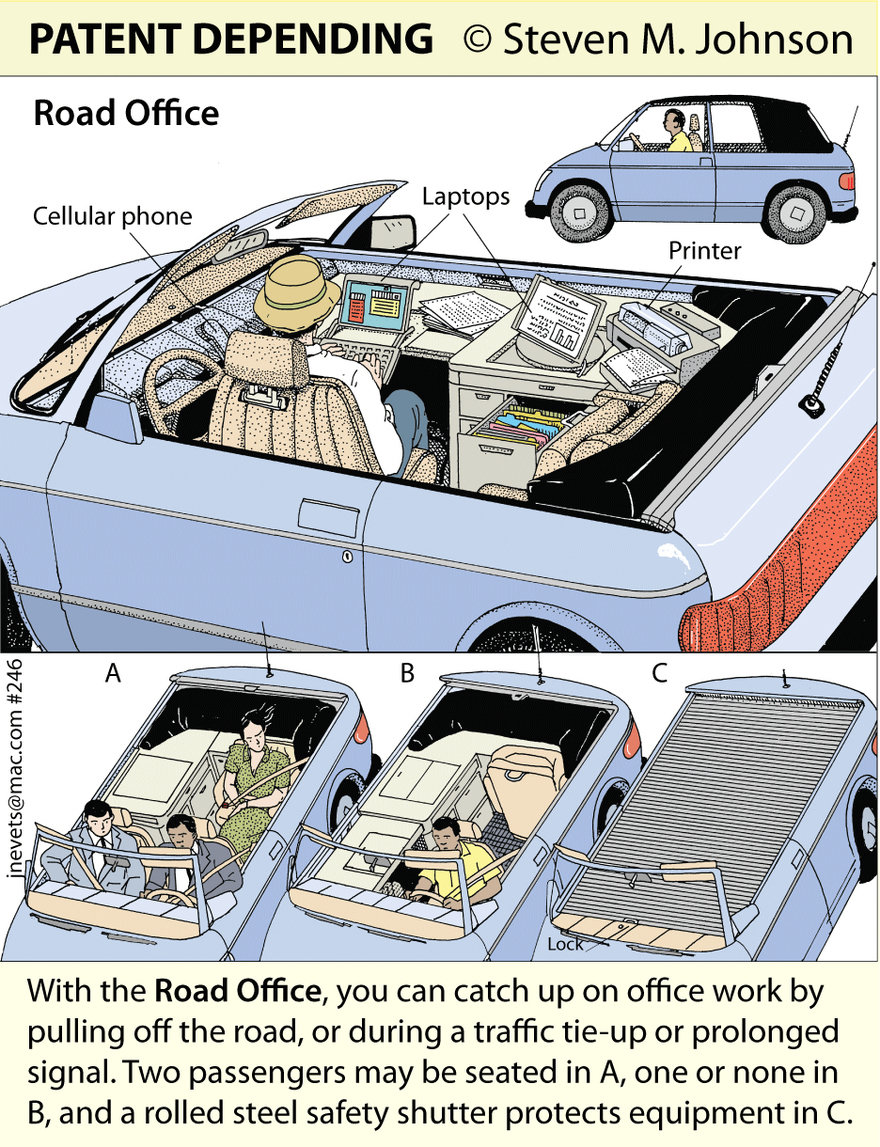
Me crucé con la curiosa sección de Steven Johnson dedicada a inventos fallidos, artilugios a medio camino entre el «¡Oh, qué ingenioso! ¿Por qué no se le habrá ocurrido a alguien antes?» y el «¿¡Pero cómo narices va a funcionar ese...

¡Ahora soy libre cual pájaro!– David Neevel Este hacker llamado David ha construido un aparatejo genial digno de los inventos locos de Simone, Colin o del mismísimo Profesor Franz de Copenhague. Es un sistema robótico llamado Operador Telefónico que puede tocar...

La hacker Alex Glow enseñó durante la 2018 Hackaday Superconference una simpática lechuza que se mueve con dos servos y tiene una especie de cardán en su estructura para mantener el equilibrio. Además de ser preciosa y de simpáticos movimientos tiene...

Esta Máquina robótica de patear palabras activada por voz es una curiosa instalación creada por Neil Mendoza. Hace básicamente lo que su nombre dice: hace «volar» palabras por el cuadro y un pie las patea de vez en cuando, de forma...

Chris Notap tiene este vídeo-tutorial que combina lo mejor del reciclaje del baratijo con la alta tecnología de las cámaras digitales: cómo fabricar una lente macro para la cámara del teléfono móvil a partir de piezas de otra cámara de desguace....

En su canal Wood by Toth el amigo Kyle Toth se dedica a mostrar cómo fabrica objetos en madera. Algo que tiene su encanto e intríngulis, y que va desde mesas a cajones e incluso tablas para cortar pizzas. Siete días...
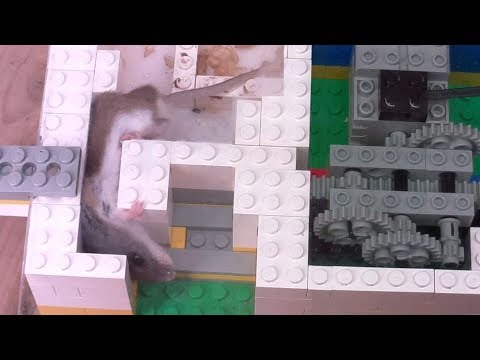
La flexibilidad de los ratoncitos, como la de muchos otros animales (incluyendo pulpos y cucharachas, por mencionar algunos) es legendaria. Matthias Wandel se proposo comprobarlo rigurosamente y por eso creo este laberinto en Lego con una puertas mecánica controlada por ordenador...

Hubo una moda pasajera llamada movimiento lento que abarcaba a su vez submodas como la comida lenta, vacaciones lentas, pasatiempos tranquilos… Lo que los seres humanos hemos hecho toda la vida, pero más despacio, en vez de «a toda prisa» como...

Antes que el spam inundó nuestras vidas el correo basura en papel. Aunque ahora es algo menos abundante que en el pasado –quizá porque su efectividad debe haberse reducido notablemente– hubo un tiempo en que recoger el correo (físico) del buzón...
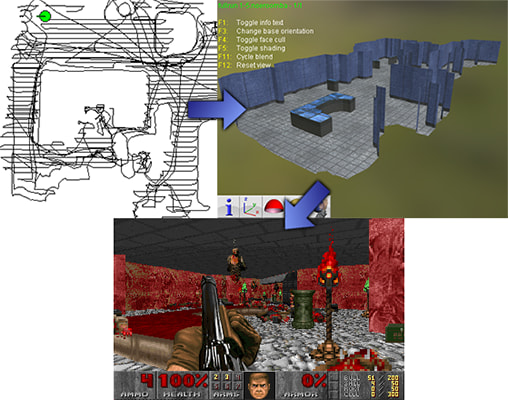
Este hackeo llamado Doomba es una genialidad de Rich Whitehouse. Consiste en utilizar los datos de escaneado de los planos de una casa generados por una aspiradora Roomba para alimentar con ellos un mapa de Doom, el popular videojuego de disparos...

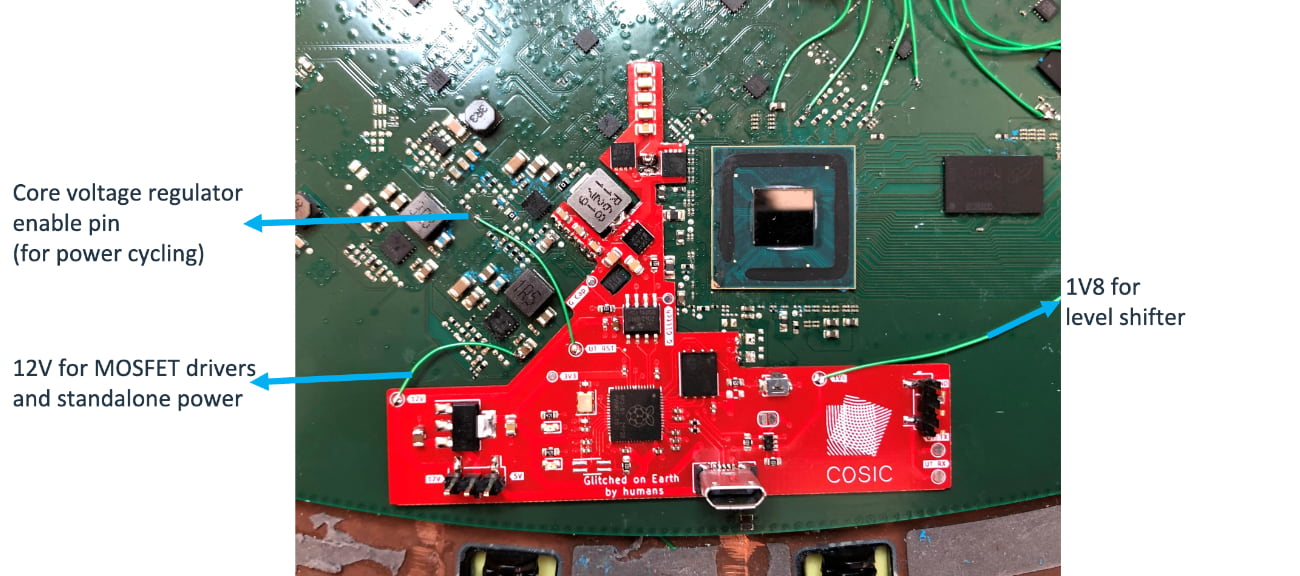
Quiero fabricar chips. Y punto.– ElectronicMercenary Nos escribió Abraham para contarnos algo sobre los esfuerzos de su equipo para fabricar semiconductores de manera artesanal en su propia casa, medio reconvertida en laboratorio, como es fácil imaginar: Queremos construir todas las herramientas...

La Consola de Mitxela es un proyecto que ha requerido unos cuatro años de trabajo hackeril de forma intermitente. Su principal característica es que se trata de una videoconsola que emplea un osciloscopio para generar las imágenes mediante gráficos vectoriales. Y...

En Hacktuber tienen este proyecto «100% niños y niñas, no hagáis esto en casa» es básicamente una pistola-cañón estilo Flash Gordon que combina muchos elementos hackeriles. Entre ellos, grandes clásicos de los inventores locos: un bote de Pringles (grandes inventos llevan...

Un grupo de los siempre jococos hackers del MIT ha creado una instalación que llaman The Laughing Room. Está en la Biblioteca Pública de Cambridge (Massachusetts) y consiste en unos micrófonos que escuchan todo lo que se dice en su interior....

El mayor problema que Samy Kamkar (hacker y especialista en seguridad) ve a las películas de hackers es que suelen emplear interfaces visuales muy llamativas pero poco realistas (¡es cine! dirán muchos, no sin razón). En casi todas hay gráficos en...

Niklas Roy nos escribió para contarnos que ha realizado esta instalación titulada Wasserorgel von Winnenden (el Órgano de agua de Winnenden) en la ciudad del mismo nombre de Alemania. Se trata de un teclado que va conectado a unos tubos de...

La primera sería utilizar esta robot aspirador de Lego obra de The King of Random, que tiene la peculiaridad de estar fabricado a su vez una gran caja de Lego «modificada» y sirve para recoger las piezas de construcción que estén...
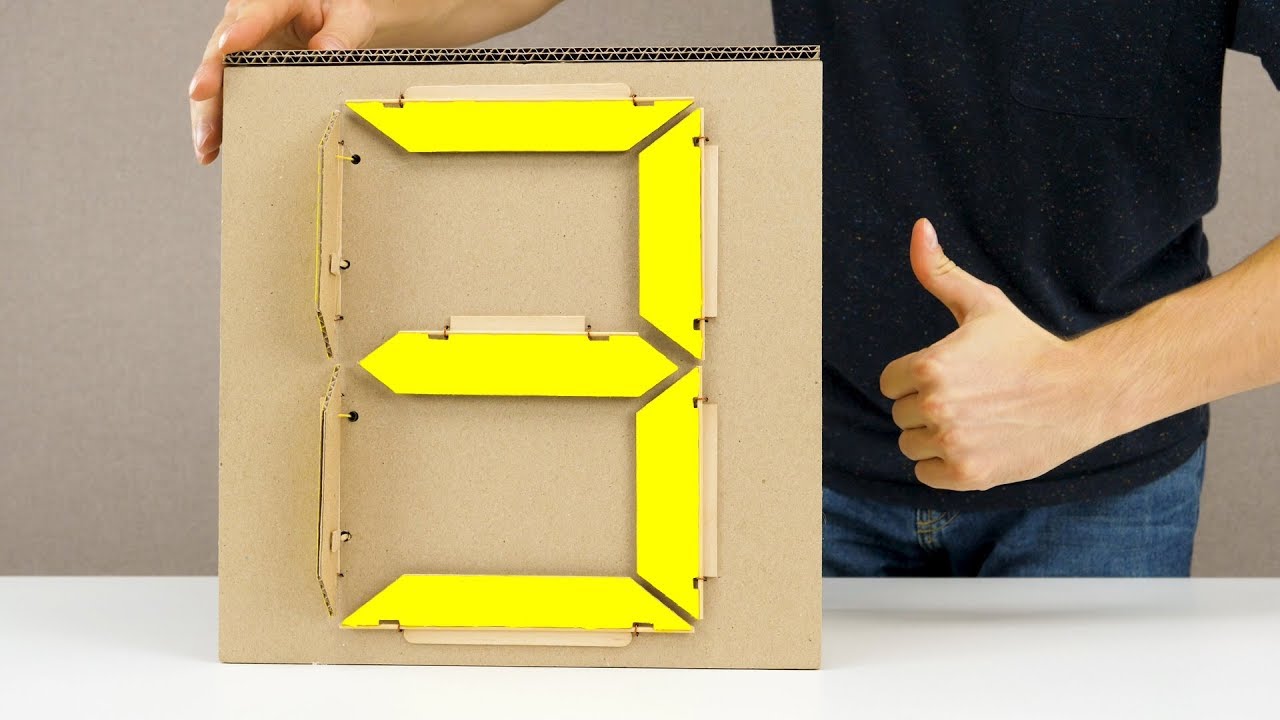
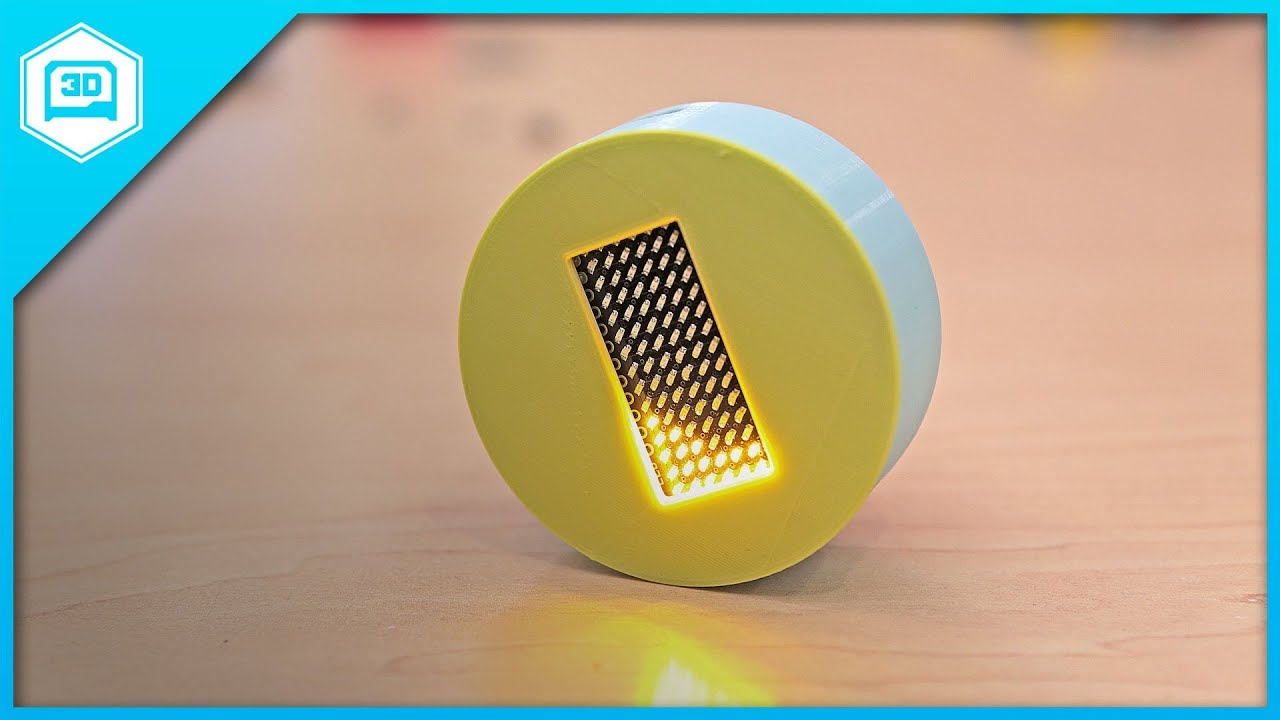
El encanto de lo viejuno y los displays mecánicos queda redoblado en este ingenioso proyecto de The Q que es un visualizador de siete segmentos fabricado con cartón, gomas elásticas y poco más. Eso sí, es tremendamente ingenioso y dedicarle una...

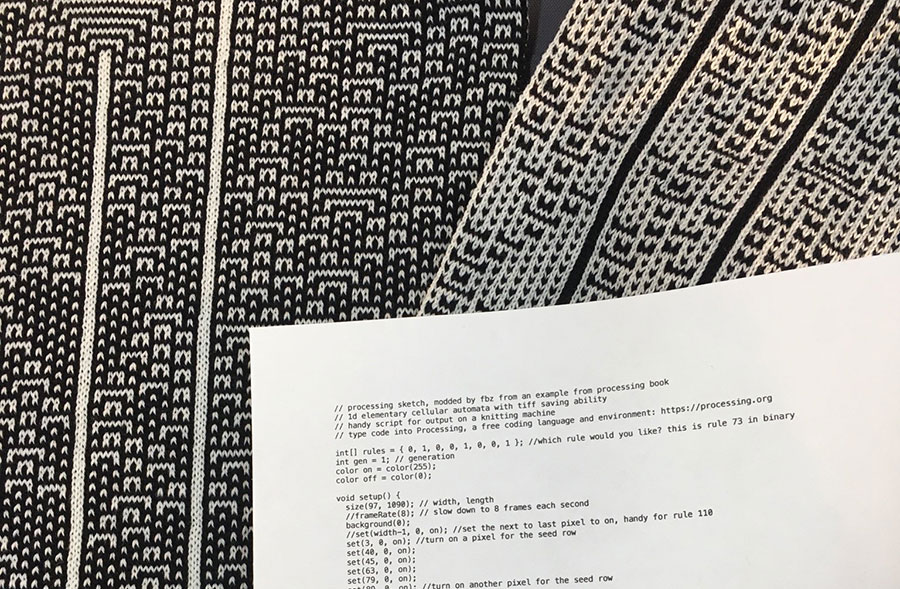
En Space.com cuentan la historia de Sarah Spencer, una ingeniera de software que hackeó una máquina de punto para tejer un mapa celeste. Las tricotosas, que es como también las llaman, son de hecho unos de los primeros dispositivos que en...
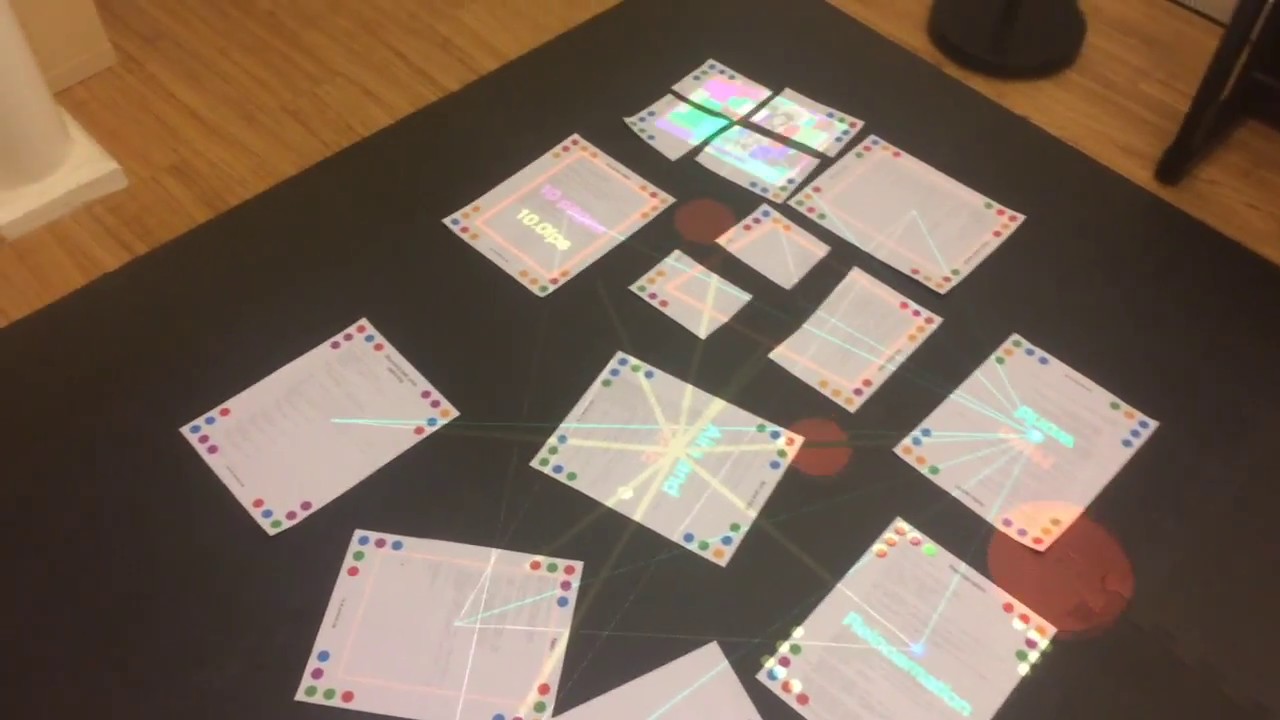
Paper Programs podría considerarse una oda a la complejidad innecesaria, pero también es sumamente bonito, divertido y hackeable. Es un invento –por llamarlo de algún modo– de JP de Dynamicland. Funciona con un proyector, una cámara y hojas de impresora en...
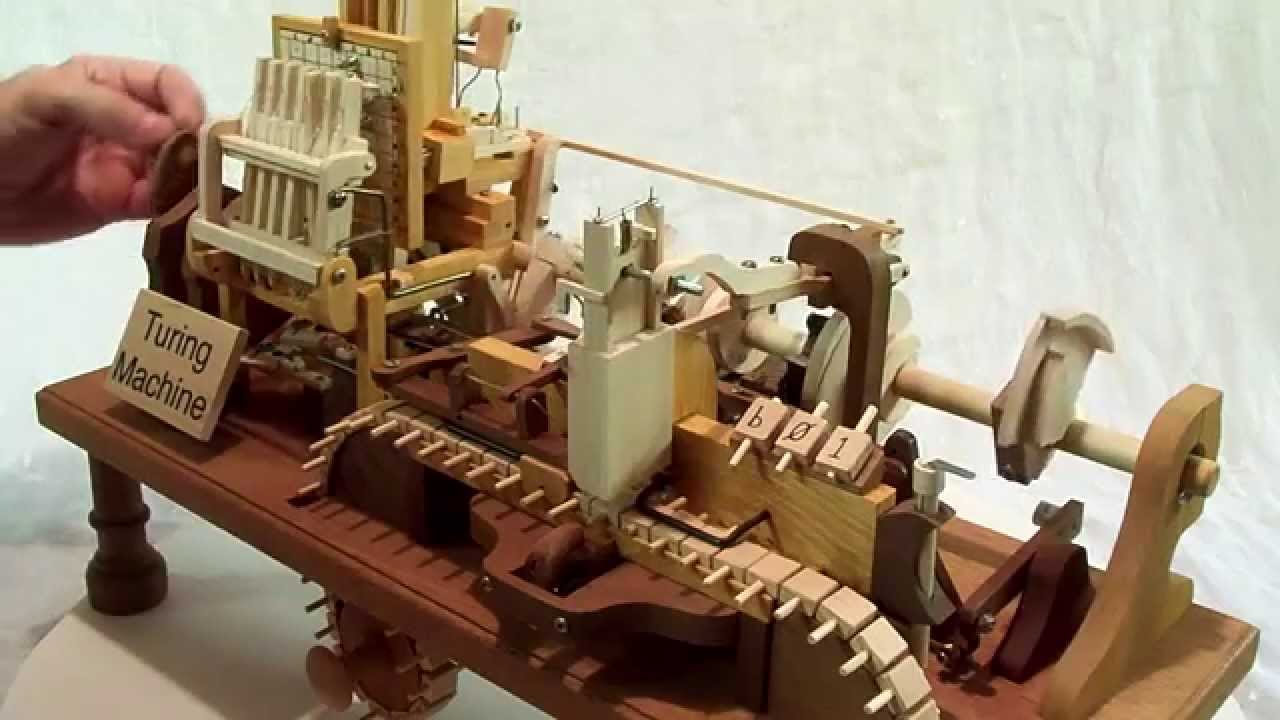
Richard J. Ridel construyó esta máquina de Turing en madera, dispositivo para manipular símbolos sobre una cinta según unas reglas, que pese a su sencillez puede simular la lógica de cualquier ordenador – ingenio increíblemente importante aunque no muy práctico porque...
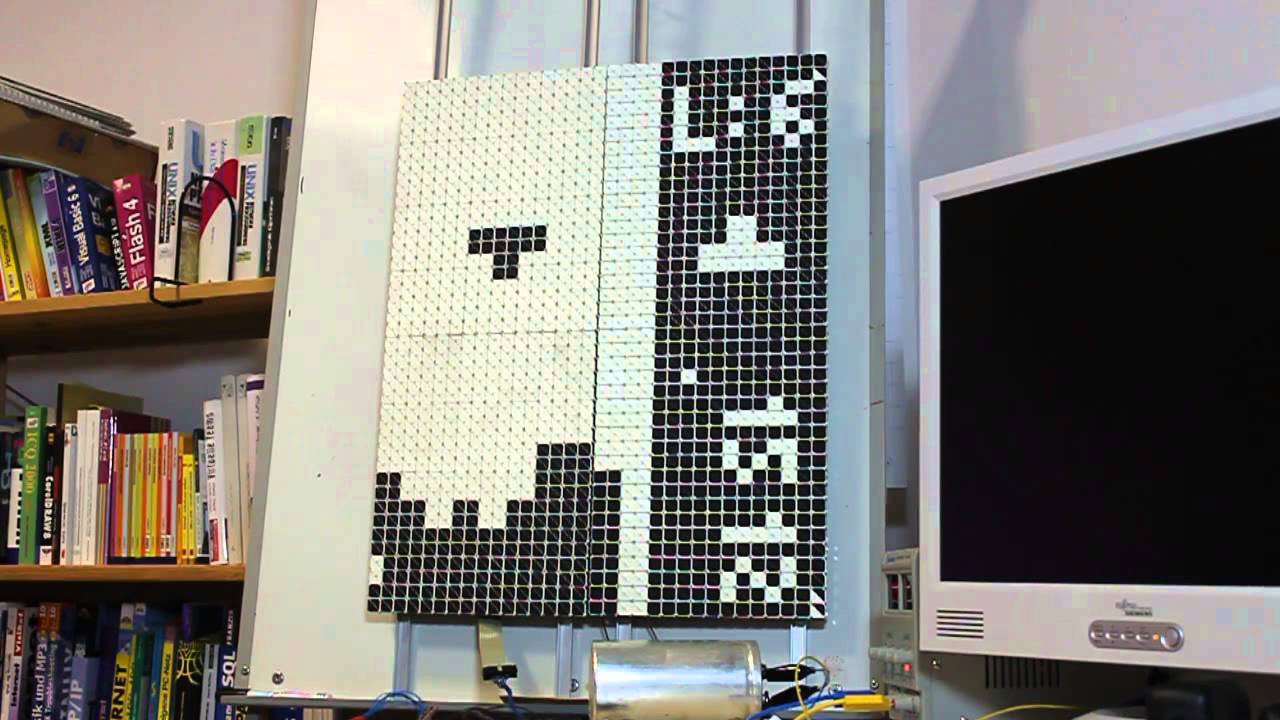
Los paneles split-flap –a veces llamados simplemente paneles electromecánicos– siguen teniendo gran encanto y atractivo aunque ya estén en desuso y sean casi piezas de museo. La gente de Bytewerk consiguió unos cuantos en el 29º congreso de hackers del CCC...
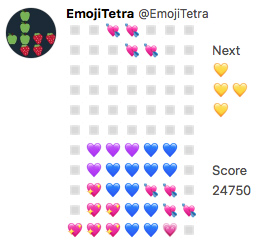
Este hackeril engendro de Joe Sondow se llama @EmojiTetra y es básicamente un bot de Tetris al que se juega vía Twitter. ¿Cómo? Cada tuit lleva incorporada una encuesta y votando se puede decidir si mover la pieza a la izquierda,...

Como proyectillo vacacional del verano Mark Rober y su cuadrilla construyeron el «robot lanzapiedras perfecto» –al que llamaron cariñosamente Skippa–utilizando como base un lanzador de platos de arcilla (como los del tiro al plato). En su primera versión funcionaba bien pero...

En Bootable CD + retro game in a tweet, Alok Menghrajani, ingeniero de seguridad en Square, explica con detalle cómo codificar una imagen ISO de disco (en formato CD-ROM) que puede inicializarse y desde el cual se puede ejecutar un vídeojuego...
Por Nacho Palou -
2 AGO 2018
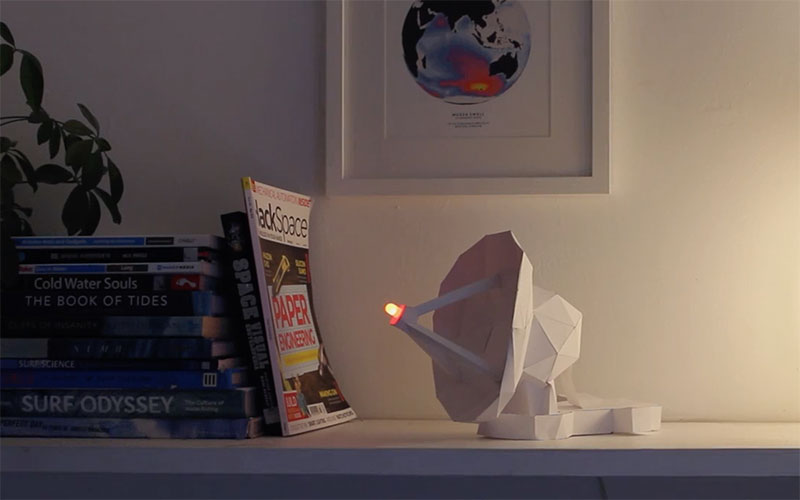
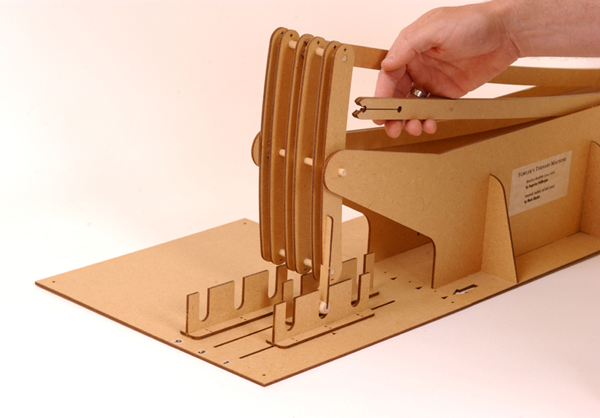
Arthur es el nombre de la primera antena de comunicaciones por satélite del mundo, situada en la Estación terrestre Goonhilly, en el Reino Unido. Project_Arthur es un proyecto diseñado para enseñar un poco e electrónica, programación, y algo de papiroflexia a...
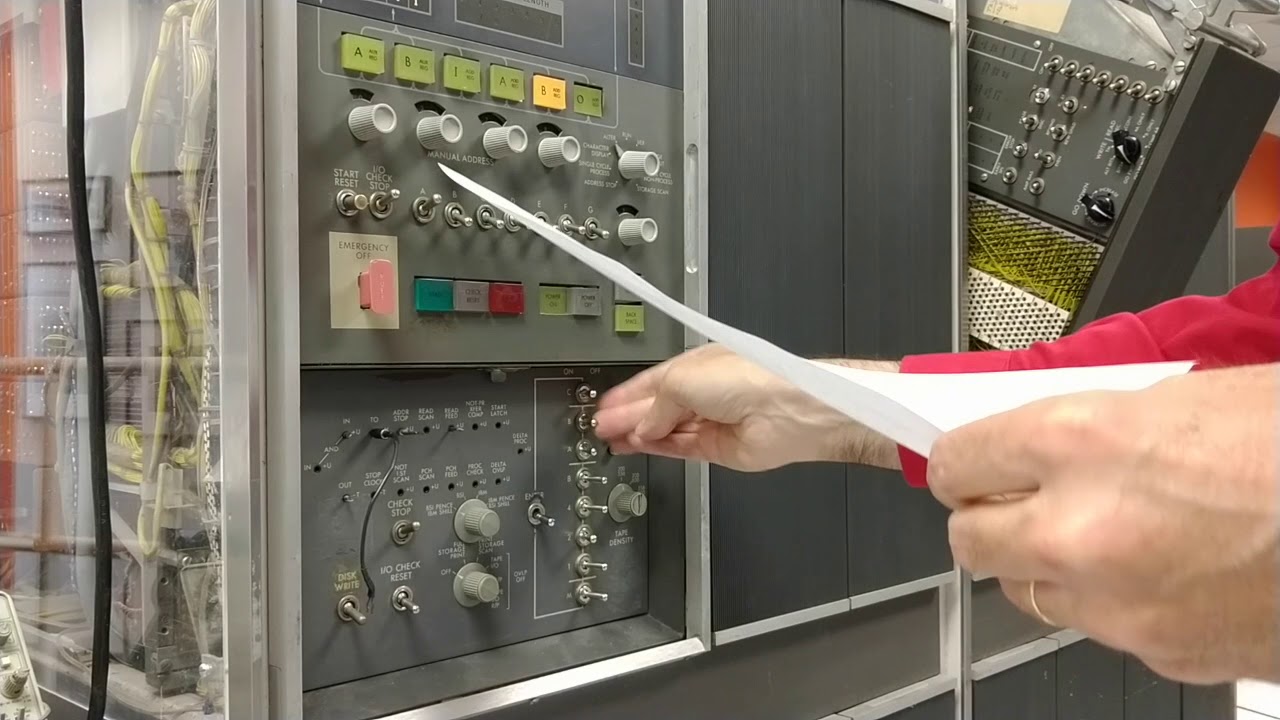
En esta nueva entrega de los vídeos de los abuelos cebolleta de la informática se puede experimentar durante más de diez minutos la (literalmente) más tediosa forma de introducir un programa en el IBM 1401: girando ruedecitas y pulsando interruptores a...
Esta maravilla fabricada por Richard Brewster que muestran en Spectrum es una recreación del primer flip-flop (biestable), uno de los circuitos básicos más importantes de la electrónica digital, que ahora cumple un siglo. Tal y como indica su nombre, es un...
A veces el ingenio de la gente va más allá de lo que podríamos suponer razonable y aunque ha habíamos visto calculadoras raras (calculadoras mediante agua o en los mundos de Minecraft o en Little Big Computer) esta sin duda se...
Dan Macnish ha inventado una pseudocámara que llama Draw This que es como una cámara Polaroid que en vez de imprimir fotografías dibuja bocetos de la escena que se fotografía. «Lo divertido es que nunca se ve la imagen original; los...
Me crucé con vídeo de una calculadora ternaria que muestra cómo operaba la máquina calculadora ternaria de Thomas Fowler, un artilugio construido en 1840 que basaba su funcionamiento en la base 3 (en vez de 2 del binario o el 10...
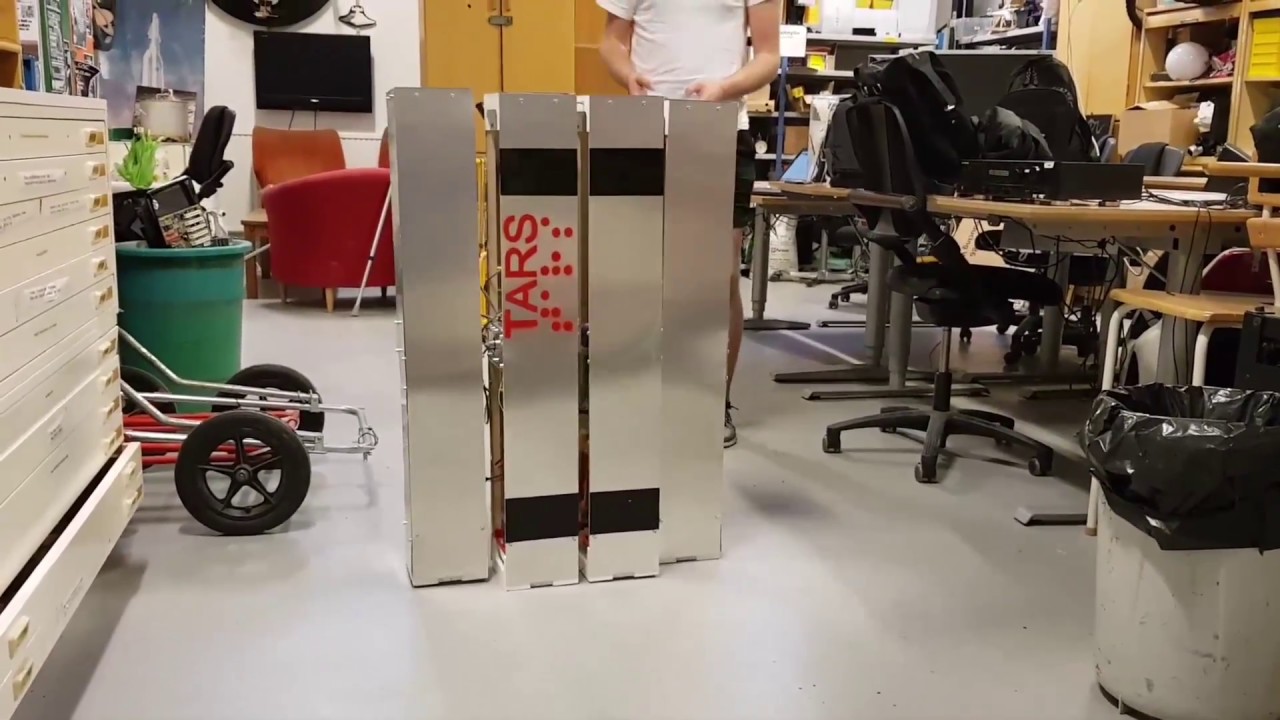
Esta versión a escala del robot TARS de Interstellar la han fabricado unos estudiantes suecos como proyecto de fin de curso. La idea era imitar el mecanismo mediante el que el TARS camina, moviéndose un poco torpemente pero de forma bastante...

Este es el típico invento que no sabes si calificar de friki o de hacker, pero merece decantarse por lo último. Es una pistola de dardos Nerf hackeada para mostrar hechizos luminosos [00:35] gracias a un motor giratorio. La llaman pistola...
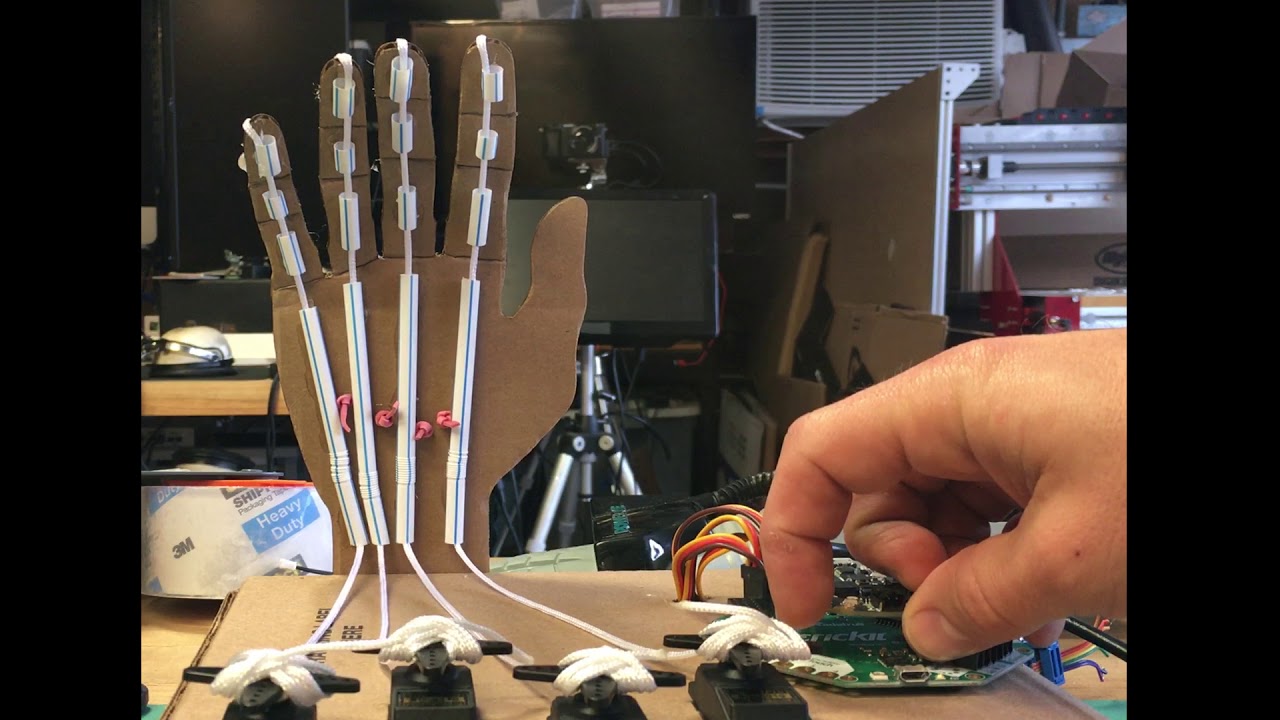
Un pequeño proyecto que casi no necesita explicación: cartón, pajitas de plástico, cables, motores y CircuitPython de código abierto. La mano va contando de 0 a 15 en binario con sus 4 dedos de cartón móviles (el pulgar está fijo). También...

A este flexo Tertial de Ikea se le sacan las tripas, se añade un miniproyector láser, una Raspberry Pi y con Android Things puede hacer maravillas según se apunte la luz sobre los objetos o paredes de la casa. Las instrucciones...

La mejor forma destacar y ser alguien puntero en tu campo es procurar que ese campo sea lo más pequeño posible.– Simone Giertz Simone Giertz, nuestra inventora de chismes estrambóticos favorita, nos deleita en su charla TED con una explicación acerca...

Este instructivo vídeo de The Q muestra cómo construir paso a paso un candado gigante de cartón con herramientas de andar por casa. Es un candado completamente funcional excepto porque debido a su tamaño no sería muy transportable. Para abrirlo hace...

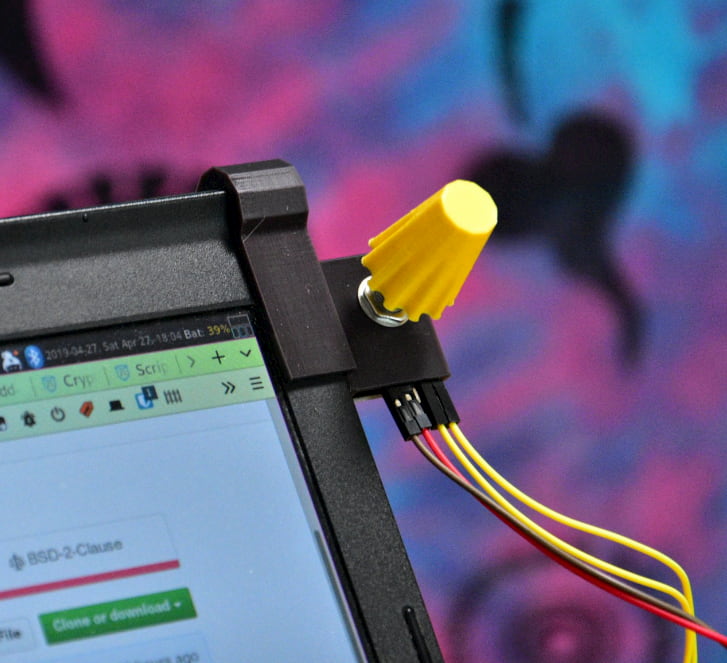
La idea de Anish Athalye es brillante por su sencillez y consiste en utilizar la cámara (webcam) que incorporan los ordenadores portátiles para convertir su pantalla en una pantalla táctil: colocando un espejo en la cámara (a modo de prisma) y...
Por Nacho Palou -
10 ABR 2018
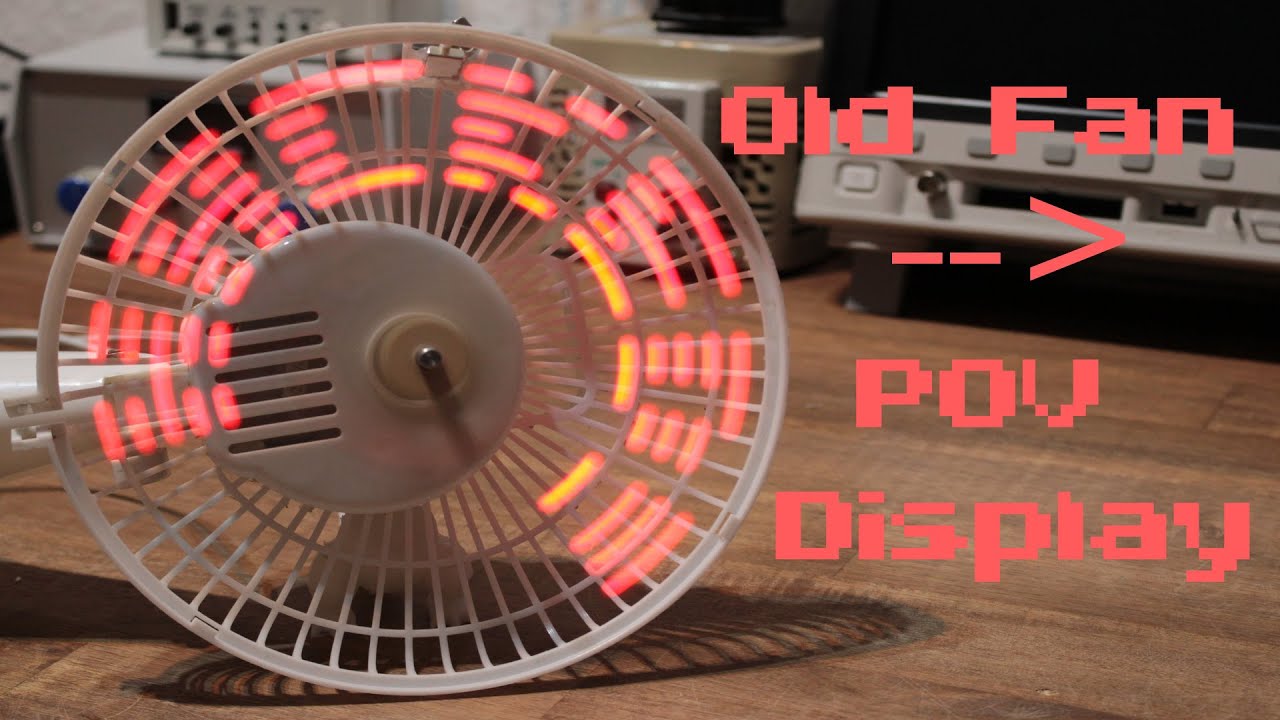
Utilizando un efecto visual este hackeo permite convertir un viejo ventilador barato en una pantalla de ledes. Es un proyecto con Arduino, una ristra de redes, algunas resistencias, un sensor de efecto Hall y una batería. Las instrucciones detalladas están en...

Fotografía: Quentin Chevrier, Valentin Squirelo. La gente de Hackerloop dice que esta es “la prótesis más molona que habrás visto porque dispara dardos de espuma”. No es para menos: se trata de una prótesis para antebrazo convertida en un cañón Nerf que...
Por Nacho Palou -
12 MAR 2018
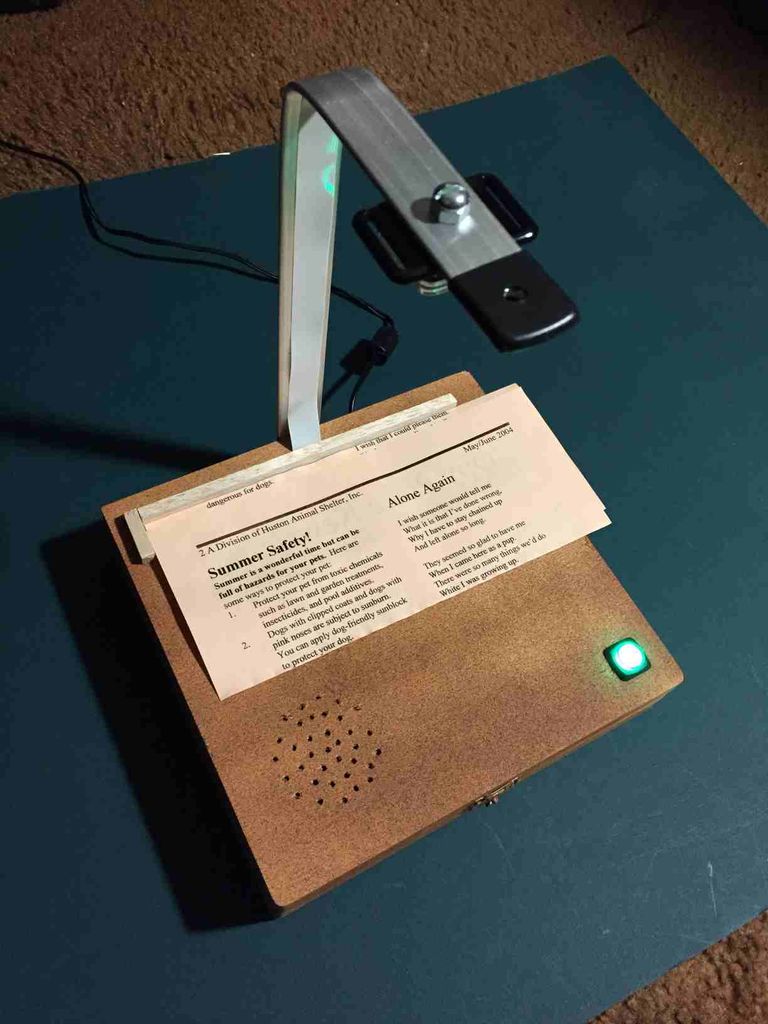
PiTextReader es un proyecto DIY que utiliza un microordenador Raspberry Pi 3 para convertir texto impreso a voz. Está diseñado para ser lo más barato posible (unos 100 dólares) y también los más simple posible: no necesita conexión internet y no...
Por Nacho Palou -
2 MAR 2018
Este display tiene el encanto de lo mecánico y antiguo: funciona con piezas que se mueven –y no lucecitas– y también con relés –que no transistores– lo cual además añade el ruidito mecánico característico, así que sólo puede caracterizarse como un...

Esta mini impresora de telegramas llamada Mini Telégrafo es un invento fabricado con una placa Arduino, madera, motores y un rotulador. Es capaz de imprimir mensajes sencillos en una tira de papel, provenientes de las apps de mensajería o de Twitter,...
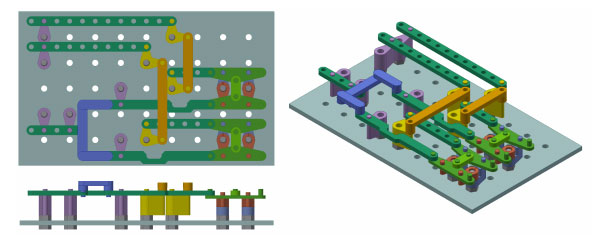
Charles Babbage y Alan Turing asentirían orgullosos y sonrientes ante este ingenioso «invento». Se trata de una descripción de la forma mecánica de crear puertas lógicas utilizando únicamente placas y pernos articulados simples, del estilo de los que incluyen juegos de...
Este proyecto de Adafruit llamado Arena LED animada es muy completo e ideal para aprender física, electrónica y programación. La idea básica es simular en una pantalla de ledes de 15×7 el comportamiento de unos granos de arena digital. La arena...

Jamie, uno de los Cazadores de mitos originales tiene un curioso proyecto llamado Vortrex que básicamente consiste en unos zapatos eléctricos con ruedas que sirven tanto para caminar más rápido como para aplicaciones de realidad virtual (haciéndolos funcionar «al revés»). El...
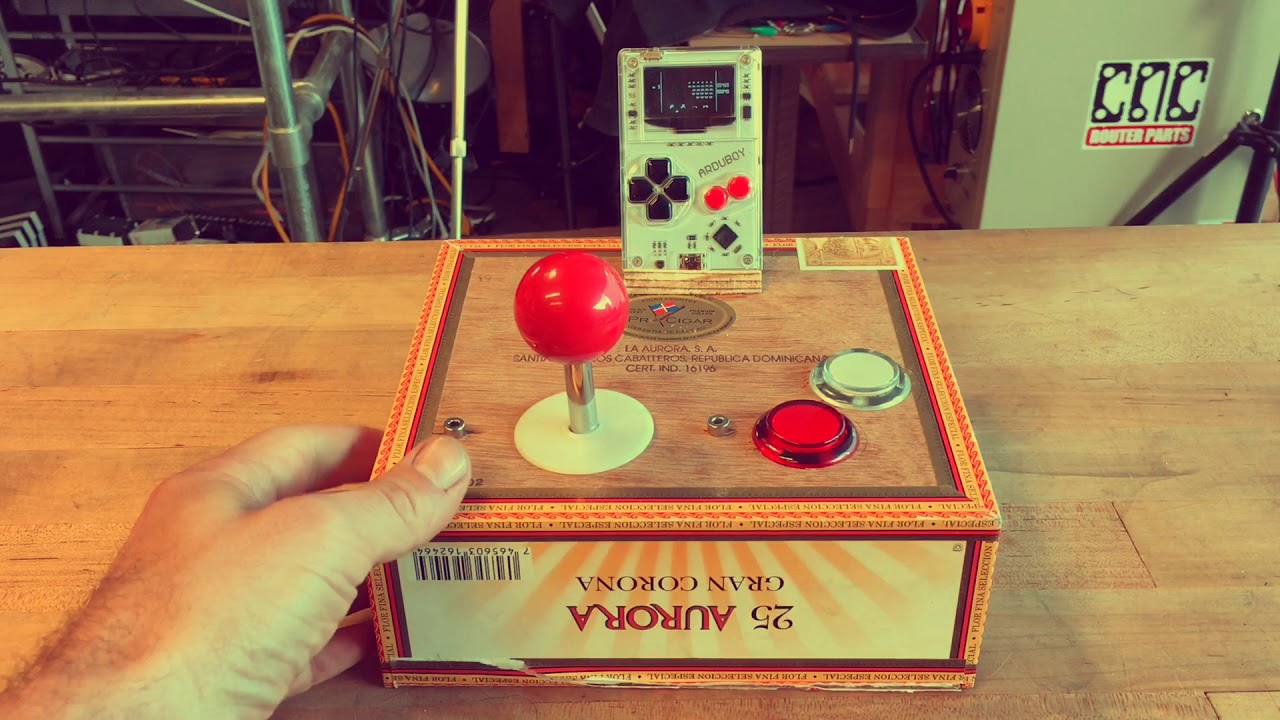
La Arduboy, de la que ya hemos hablado por aquí alguna vez, es una pequeña mini-consola personal con tecnología Arduino sobre la que funcionan juegos de 8 bits escritos por gente corriente. A pesar de nombre y de su aspecto no...

Puntuada con un mísero 6,2 en la Internet Movie Database, cuando se estrenó Hackers, de Iain Softley, hace ya más de dos décadas (1995) todo el mundo andaba un poco flipadillo con lo de la «nueva era de Internet» y sobre...

Este vídeo muestra el aspecto y funcionamiento del Mini Raspberry Pi Handheld Notebook, un mini-Pc con mini-pantalla y mini-teclado; algo apropiado para quienes sean fans de los Raspberry Pi, tengan manos pequeñas o simplemente disfruten con los retos de hackear gadgets...
Este proyecto artesano pero tecnológico a la vez no solo es encantador sino que además tiene cierto toque misterioso. Se trata de un mecanismo secreto para abrir un cajón. Pero en vez de ser una llave o una combinación de números...

Con una pantalla plana de televisión enmarcada a lo The Frame, pero con un marco de la vieja escuela, John Park logra crear el efecto de que se trata de una pintura antigua encantada. Entre bambalinas una Raspberry Pi Zero produce...
Por Nacho Palou -
19 SEP 2017

El tipo que se construyó un iPhone 6S con piezas de mercadillo chino ha vuelto a las andadas. Esta vez estaba empeñado en demostrar que podía añadir un jack de auriculares tradicional a un iPhone 7. Y lo consiguió, no como...
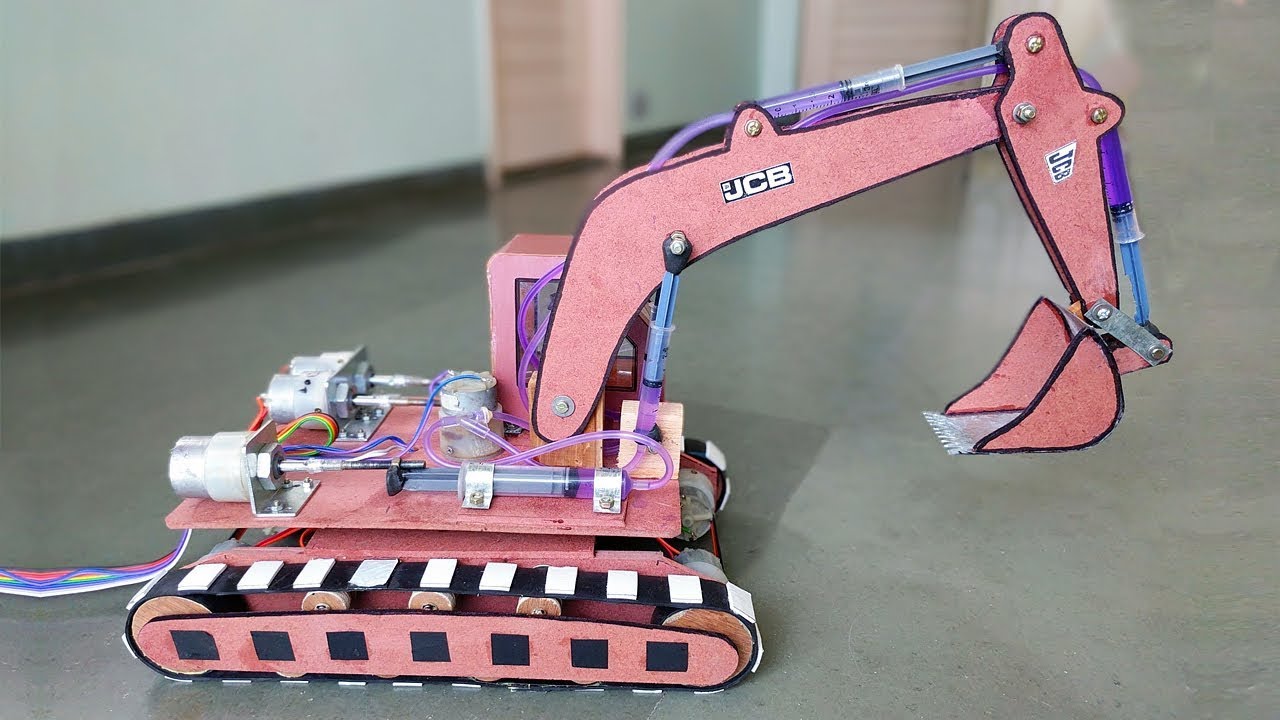
Este vídeo de Mr. NK muestra cómo construir una ingeniosa excavadora hidráulica. Lo mejor es precisamente la parte hidráulica porque este tipo de artilugios normalmente se conectan directamente los motores a las juntas (o mediante cables o cuerdas) y aquí se...
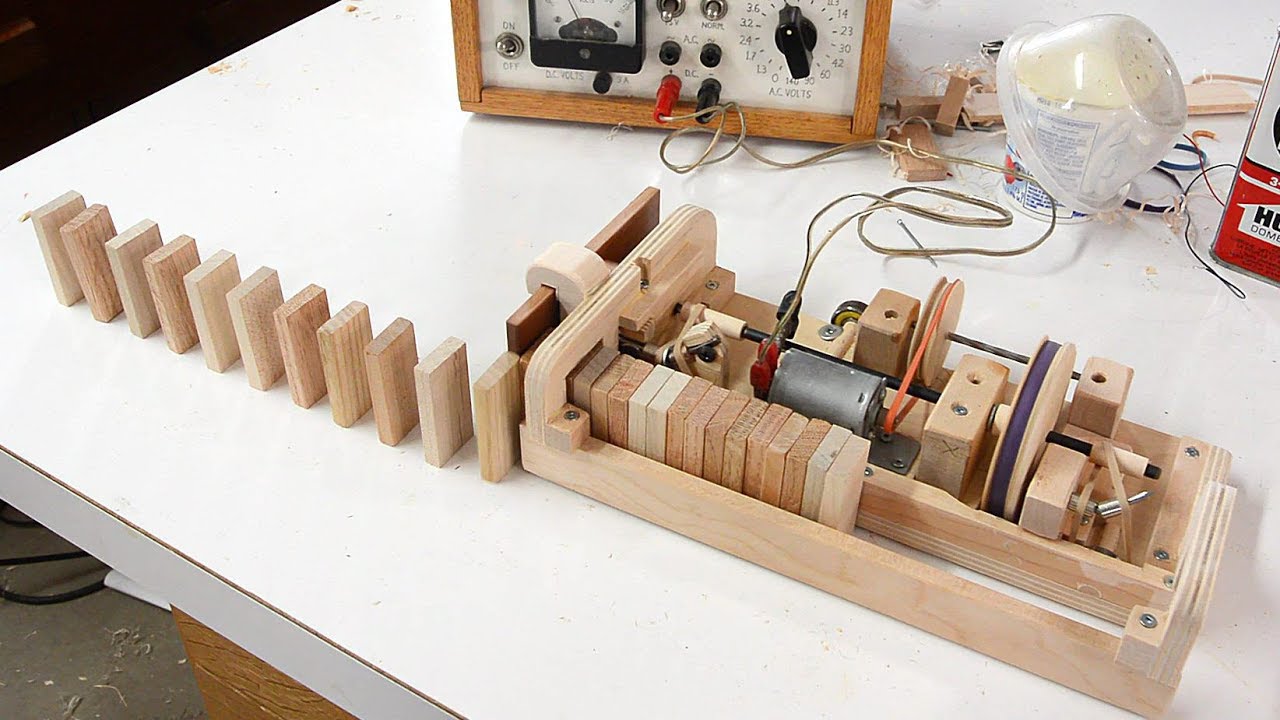
Esta altamente satisfactoria máquina preparadora de filas de dominós es un invento de Matthias Wandel. Parte del mérito es que es completamente mecánica y no está controlado por ordenador. Toda una máquina de baja tecnología que sin embargo ya existió en...

Inspirados sin duda por los zapatos mágicos que llevaba Dorothy en El mago de Oz (1939) estos zapatos hacen aparecer «mágicamente» un coche de Uber con solo chocar los tacones tres veces. Según cuentan en New Scientist son un invento de...
En Thingverse hay un proyector láser mecánico que es un mecanismo bastante simple de ruedas dentadas en el que se sujeta un puntero láser con una goma elástica. Por la descripción desde luego que no parece tecnología punta, pero es muy...
Hay quienes defienden que las máquinas de tejer fueron los primeros ordenadores programables, y algo de razón no les falta – aunque su uso no era lo suficientemente «general». Fabienne tiene una máquina de tejer Brother KH-930 hackeada y teje con...

El Lightino es un fidget spinner en el que caben ocho ledes RGB, la electrónica básica de Arduino y una batería para crear efectos visuales realmente llamativos al hacerlo girar. Como herramienta educativa resulta más que interesante; es lo que se...

TheKingOfDub5 ha compartido este espectacular montaje de imágenes y vídeos sobre cómo hizo para hackear y controlar su DeLorean DMC-12 con un iPad a través de Bluetooth. El iPad Mini va instalado en el salpicadero donde normalmente se aloja el equipo...
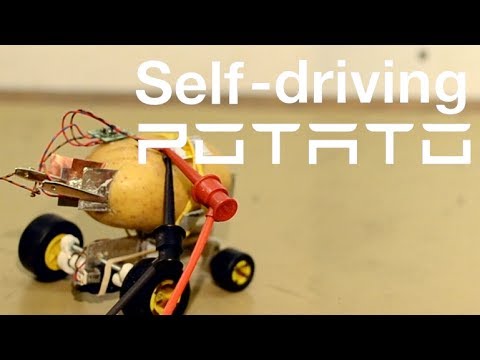
¿Sabes aquello de encender una bombilla con una patata? Ahora la cosa puede ser más divertida: alguien tuvo la idea de conectarle un circuito especial que recoge la energía aunque sea tan escasa como para a duras penas alimentar una calculadora....

Caroline Buttet reconvirtió un bonito globo terráqueo en una especie de dispositivo táctil con el que mostrar un álbum de fotos con imágenes de todo el planeta. Si te gustan los globos terráqueos, la fotografía y los hackeos electrónicos te encantará...
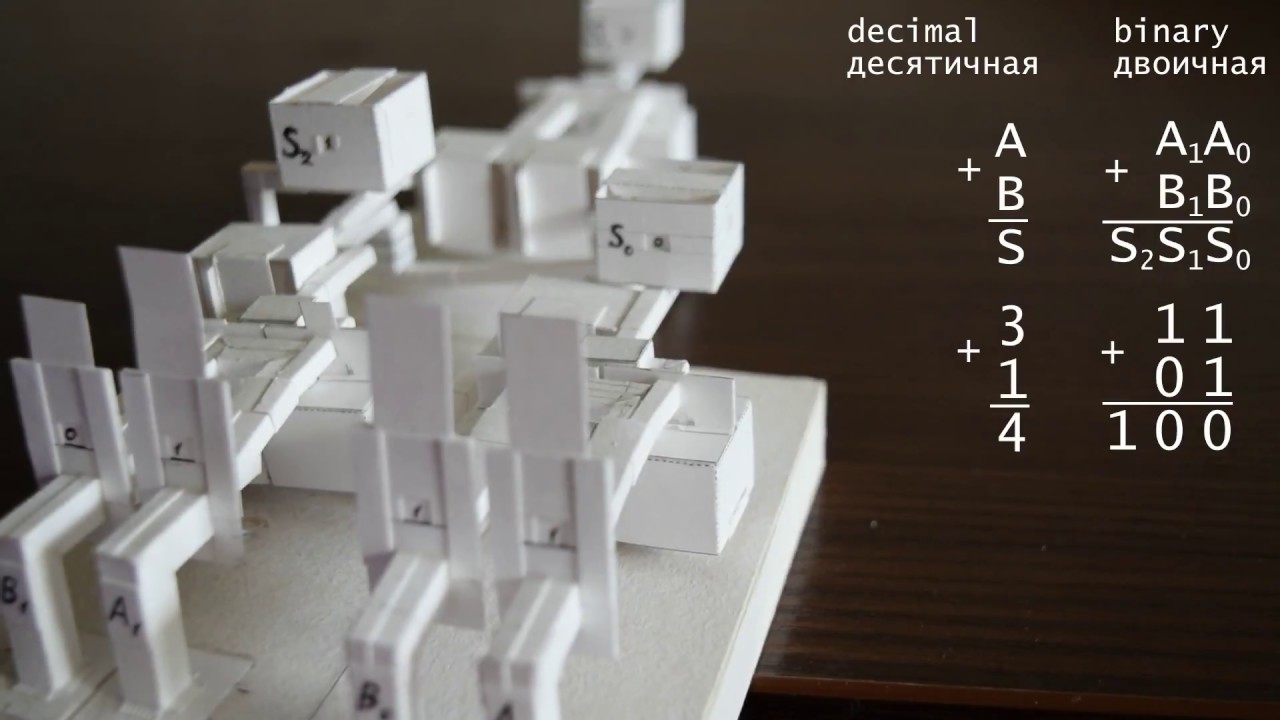
Este curioso ingenio es un circuito sumador binario construido con cartulina, tijeras y pegamento. Esto ya es bastante complicado de por sí, pero rizando el rizo además utiliza energía neumática en forma de aire comprimido procedente de un globo normal y...

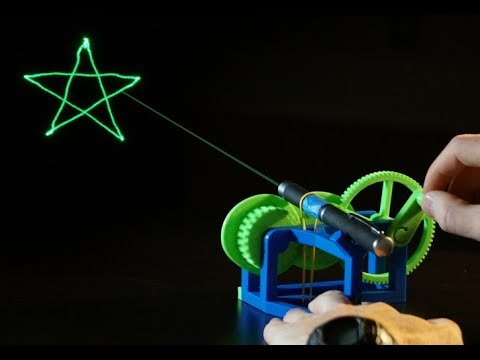
Habíamos visto muchas variantes de Asteroides (1979), el mítico juego de Atari en el que nos dejábamos las monedas en los 80, pero ninguna tan espectacular como esta: un montaje en el que la pantalla está proyectada con láseres. La idea...
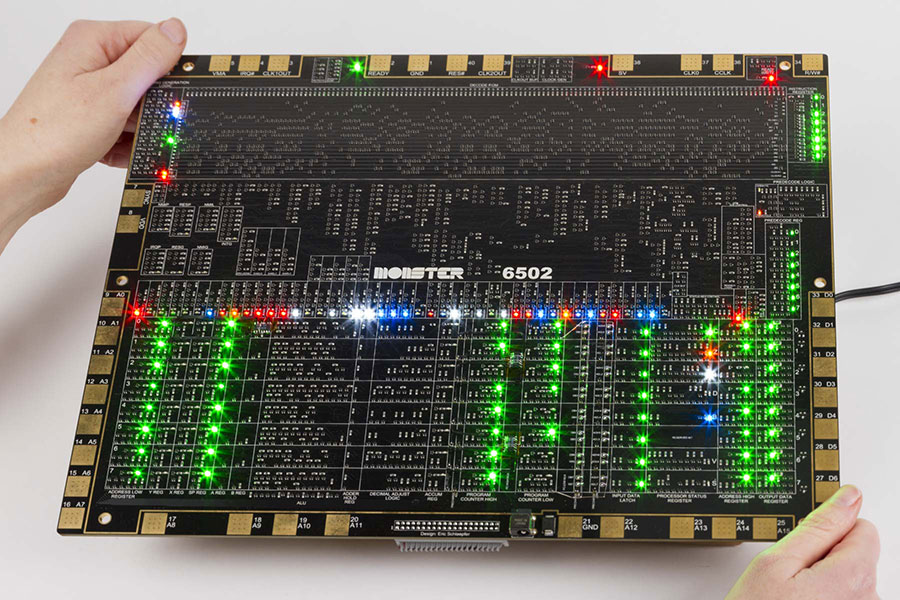
Este gigantesco montaje es el circuito de un microprocesador MOS 6502 a escala (7000:1), aumentado para hacerlo funcionar igual que el original pero con transistores y lucecitas en versión XXXL. Lo han llamado sencillamente MOnSter 6502, algo apropiado para su desproporcionado...
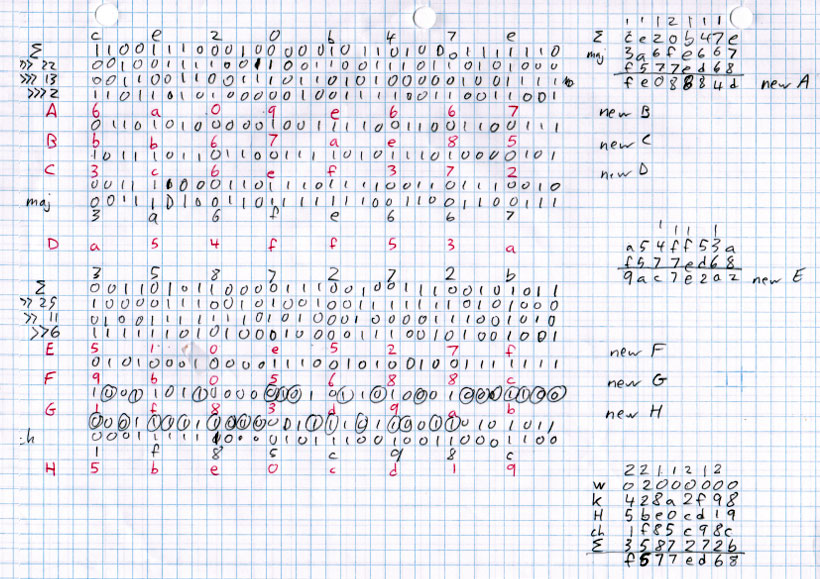
Rápido no es. Pero posible sí. Por eso esta historia de Ken Shirriff que hizo una prueba para comprobar cuánto tardaría en minar bitcoin a mano tiene un mérito especial. Según cuenta el hash SHA-256 es relativamente fácil de calcular a...

Cuando los hackers se reunen a pensar sobre «inventos raros» cualquier cosa es posible. Hace unos días el Equipo Liquid IT de Accenture Digital organizó lo que llaman La Semana Marciana, que básicamente es la presentación de proyectos originales con tecnologías...

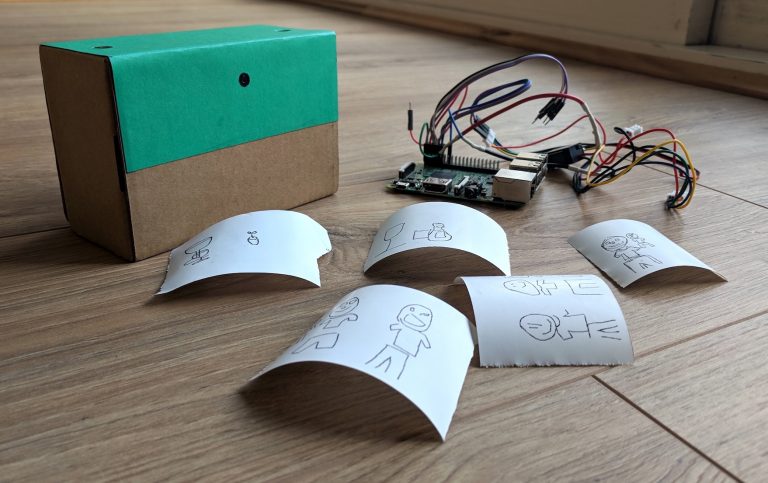
Google y la revista The MagPi han lanzado un kit de cartón con algunos componentes electrónicos para la construcción de un kit de asistente de voz que conecta una Raspberry Pi con Google Asisstant. El kit viene de regalo con la...
Tal y como cuenta en su blog, Jacques Mattheij tiene un curioso proyecto en marcha que es la construcción de una máquina para separar y clasificar toneladas de piezas de Lego. De momento tan solo tiene un prototipo y muchas experiencias...

Este reloj denominado Cold War Clock hace honor a su nombre al haber sido fabricado en la era moderna pero únicamente con componentes y tecnologías anteriores a 1959. El corazón del reloj son unos tubos Dekatron como los que se usaban...

En Strange Parts cuentan la historia de la construcción de un iPhone «pieza a pieza», que comienza cuando el protagonista se pregunta si sería posible con todos los componentes y recambios originales (o no tanto) que se venden en los mercadillos...

Bob de Making Stuff muestra cómo construir un soporte para monitor que gira virtual y físicamente la pantalla 90°, pasando de orientación horizontal a posición vertical, para que sea más cómodo leer documentos....
Por Nacho Palou -
13 ABR 2017

Este Mac Classic construido con Lego por Jannis Hermanns funciona, aunque no como un Mac de verdad. En cambio dispone de un microordenador Raspberry Pi Zero y una pantalla de tinta electrónica en la que muestra información como la hora, el...
Por Nacho Palou -
6 ABR 2017

En Make están las instrucciones detalladas y el código con la programación para construir y hacer funcionar este Drink Robot que en el vídeo prepara un cóctel Mai Tai, más o menos. Este “proyecto de fin de semana” cuenta con seis...
Por Nacho Palou -
30 MAR 2017

¡Maldición! ¡Otro juego en el que las máquinas nos superan! Desde luego la utilidad de este invento de Mark Rober –una diana que se «apunta sola» para que aciertes siempre– es muy limitada, porque el juego pierde toda la gracia. Pero...

Un poco de madera, unas piezas impresas en 3D, un motor eléctrico y un microordenador Raspberry Pi y poco más es todo lo que hace falta para construir un tocadiscos. La hoja de la planta que roza con el plato es...
Por Nacho Palou -
13 MAR 2017
De unas reglas muy simples puede surgir algo muy complejo; en algunos autómatas celulares como el Juego de la vida esto se traduce en que de repente se convierten en una suerte de ordenador universal capaz de computar cualquier cosa. Como...

En Windows 98 Wrist Watch se detalla el desarrollo de un proyecto que combina el sistema operativo Windows 98 y un microordenador Raspberry Pi en un reloj de pulsera, en un smartwatch forrestwatch. El resultado es un reloj un poco aparatoso....
Por Nacho Palou -
3 MAR 2017

El teleprompter es un invento de los años 50 que va proyectando el texto que debe leer un presentador de televisión sobre un cristal situado justo delante de la cámara. Con esto se logra que el sujeto «mire directamente a la...

Suena Under the Town, de Holly Throsby. Este vídeo de Technically Possible muestra el funcionamiento de un pequeño mecanismo de Lego Mindstorms EV3 capaz de tocar el piano. Los dedos robóticos son cuatro en total, capaces de tocar algunas melodías sencillas...

Cariñosamente la llaman papelfugadora. Este invento surgido de la universidad de Stanford es una solución de baja tecnología a las costosas centrifugadoras que se usan en los laboratorios. Nacida de una idea de los juguetes infantiles es capaz de realizar pruebas...
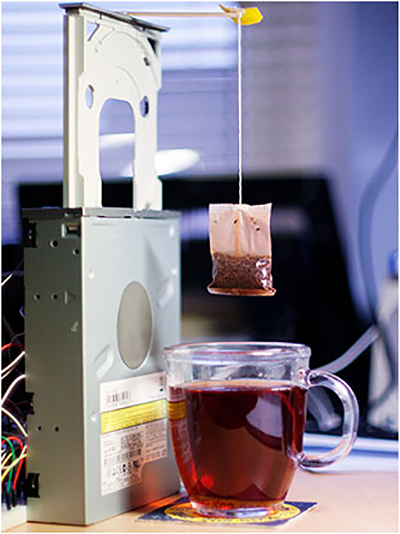
El CDTea es un bonito (y claro) ejemplo de sobreingeniería: para su proyecto Andrey Chilikin recurre a un microordenador Rasperri Pi que controla el mecanismo de una vieja unidad lectora de discos compactos (CD) para que su máquina meta y saque...
Por Nacho Palou -
12 ENE 2017

Cuando la aguja de un tocadiscos recorre los valles y las elevaciones que hay grabadas en los surcos de un disco de vinilo la aguja vibra, y esa vibración se convierte en sonido. El principio de funcionamiento de un fonógrafo es...
Por Nacho Palou -
26 DIC 2016
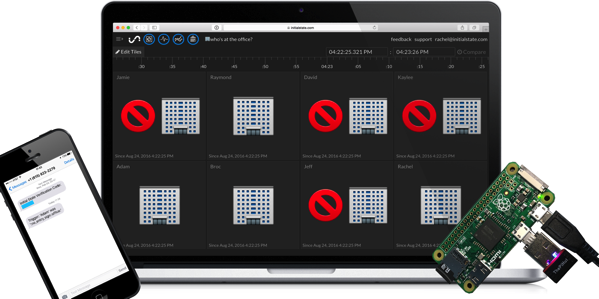
El detector de presencia por wifi descrito en Wifi Detector, Know Who is at Home utiliza un pequeño ordenador Rasperry Pi para conocer qué dispositivos, como móviles, están conectados a una red wifi determinada y conocida, La manera en la que...
Por Nacho Palou -
20 DIC 2016

Esta historia titlada Find my Phone [subtítulada] tiene algo de detectivesco y hackeril; es una película de Anthony van der Meer, al que robaron su iPhone en Amsterdam en una tienda, por el clásico método de despistarte para pedirte algo mientras...

Este Piano de las nubes (Cloud Piano) está modificado de modo que un mecanismo de 88 piezas puede tocar cada una de las teclas. Una cámara captura imágenes del cielo del edificio, que se transmiten en tiempo real al ordenador, que...

Este mecanismo robótico llamado Air Hockey Robot Evo juega al hockey de aire con tanta habilidad que es capaz de ganar a los humanos. Es una creación de la gente de JJRobots y a la vez todo un hackeo de mecanismos...

Desde el Departamento de cosas que hacer con un teléfono público viejo, Fuzzy-Wobble explica y muestra pasado a paso en Instructables cómo reutilizar una teléfono público de los noventa, convirtiéndolo en una gramola. El hackeo aprovecha todas las partes de la...
Por Nacho Palou -
30 NOV 2016

El Teslaphatic es efectivamente un Tesla Telepático. Lo que han hecho estos hackers es utilizar una interfaz cerebro-ordenador (OpenBCI) para registrar dos pensamientos distintos: «acelerar» y «parar». Un sistema de aprendizaje convierte estos dos «estados mentales» en señales de aceleración y...

Cómo entrar fácilmente en un ordenador sin tener acceso a la contraseña. Se puede hacer con medios que están al alcance de cualquiera. Y no se requiere experiencia previa. Niños, no hagáis esto en casa ni utilicéis vuestros conocimientos para actividades...

New Atlas ha publicado una serie de tres artículos sobre los hackers en las películas de Hollywood de los años 80, 90 y 2000 que bien merece repasar: Hollywood and Hacking: The 1980s Hollywood and Hacking: The 1990s Hollywood and Hacking:...

Estas cajas mecánicas combinan la belleza de lo artesanal, mecánico y físico con una placa Arduino. Los diversos sonidos (vibraciones, golpes, frotamientos, etc.) se producen a medida que los usuarios pulsan diversas teclas en un mando de control. Es un método...

Esta charla de Elie Bursztein en la Defcon 2016 muestra el funcionamiento con todo detalle de un curioso conjunto de dispositivos que él y un multidisciplinar grupo de hackers logró encontrar en el mercado negro. Se sabía su existencia, medio leyenda,...

Esta mesa de ping-pong llamada Ping Pong FM parece divertida: la música de acompañamiento sigue el ritmo del juego, gracias a unos sensores instalados en las raquetas. De lento a rápido va aumentando el ritmo de la música; los jugadores eligen...

Dicen que la vida sería mucho mejor si tuviera banda sonora. En RedPepper han decidido llevar aproximarse a esa idea con un invento llamado Doorjam que básicamente detecta tu presencia y reproduce tu «tema musical personal» en lo que podría considerarse...

Gran Thompson, discípulo de MacGyver, explica en este vídeo cómo encender fuego con un lápiz si tienes a mano el coche con su batería y unos cables con pinzas. La idea es hacer arder el grafito de la mina del lápiz....

Un entretenido, divertido y sin duda resultón proyecto de fin de semana con uno de los símbolos más icónicos de Stranger Things: la pared con adornos de navidad y ledes luminosos. En SparkFun explican cómo se construye. Los componentes de la...
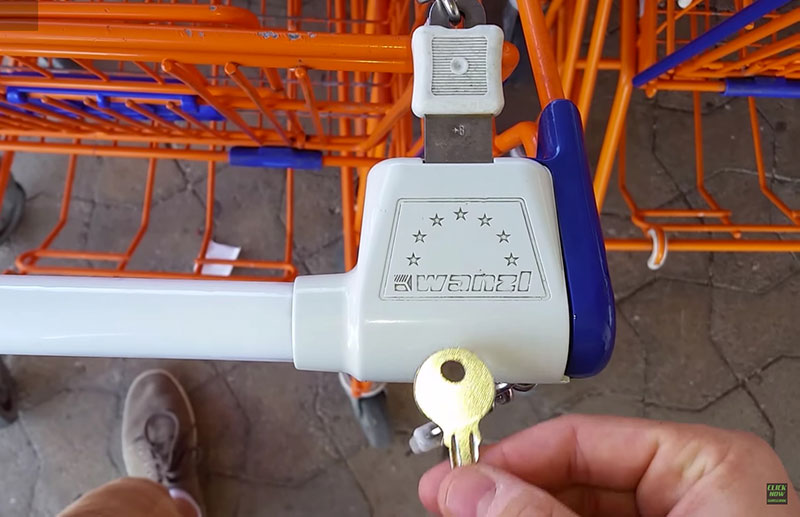
¡Fácilmente! Aunque no lleves monedas a mano siempre llevarás una llave y las de tamaño estándar suelen encajar en la mayor parte de los carritos de supermercado. Simplemente la usas, cuando terminas la sacas y listo, problema solucionado....

Boeing fabrica 42 aeronaves 737 cada mes, una cifra grande para tratarse de un avión de entre 50 y 85 millones de euros, dependiendo de la variante. El 737 se fabrica ininterrumpidamente desde 1967. En el año 2014 entregó el número...
Por Nacho Palou -
28 SEP 2016
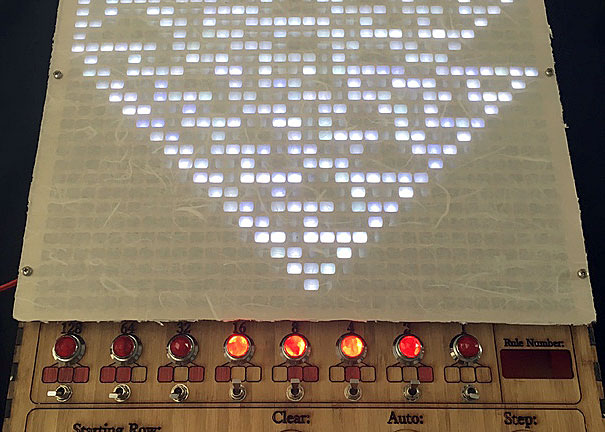
Gavin de Tinkerings construyó este explorador de autómatas celulares, una máquina física y muy visual para ver en funcionamiento los autómatas celulares 1D más básicos. En su pantalla cada línea es un «momento» en la evolución de las «células»; la máquina...

Expertos chinos en seguridad del Keen Security Lab, muestran en este vídeo el nivel de control que llegaron a tener sobre un Tesla Model S –a distancia— siendo capaces de interferir las pantallas, actuar sobre las cerraduras, el techo solar, los...
Por Nacho Palou -
20 SEP 2016

De pequeño podías ser de Lego o de Meccano. O, como a muchos de nosotros, podían gustarte ambos juguetes, cada cual con sus peculiaridades. En el Club Meccano de Londres fabricaron esta máquina de pinball completamente funcional y con todos los...

Calificada como «la más precisa escena de hacker jamás rodada» este momento de la octava temporada Castle (episodio 8) podría pasar a los anales de la informática más bien como la mayor serie de WTFs encadenados de la historia del hacking....

En Night Hawking Light están haciendo algunos experimentos caseros con láseres, lentes y humo de modo que la luz reflejada pueda grabarse en vídeo con espectaculares efectos. El resultado es que cuando se graba a cámara superlenta (240 fotogramas por segundo)...
Lo llamé @ Cafe y, colega, la gente no tenía ni idea de lo que significaba el símbolo ese.– Glenn McGinnisFundador del @ Cafe (1995) Corrían tiempos de cambios en el invierno de 1995… La Web se había inventado hacía poco...

Cory explica en esta microentrevista dos o tres cosillas sobre cómo enseñar a los niños a hackear para el bien, a adentrarse en un mundo tecnológico de curiosidades, experimentos y aprendizaje sin liarla parda. Su teoría se basa en que hay...
Javier «el Javo» nos envió una información sobre el Kansas Fest, un pequeño festival de una semana de duración donde se rememoran los tiempos de los inicios de Apple con aficionados de todas partes del mundo llevando sus Apple II y...

Perry Rosen es el protagonista de esta pieza de Great Big Story. Su trabajo es una labor doblemente obsoleta: por un lado, reparar máquinas viejas –algo poco habitual en el mercado de consumo y usar-y-tirar de hoy en día– y por...

Nova tiene este pequeño vídeo sobre quiénes son los hackers y qué es el hacking. Me pareció un muy buen resumen para los tres minutos que dura; de hecho recopila muchas de las ideas sobre los hackers originales, las diferencias con...

Felix Vorreiter inventó el Flux 1440 hace ya unos años; es un reloj «digital» que utiliza una cuerda, cuerda, con marcas de color negro que muestran la hora exacta. Es un híbrido de lo más peculiar; notablemente ingenioso sin duda. El...

Cómo hackear Pokémon Go usando un dron para que revolotee grácilmente por ahí buscando los pokémon que haya sueltos por la zona. Complicado, arriesgado y probablemente caro –siempre hay riesgo de crash– pero definitivamente dentro de lo posible. [Nota: también estará...

Esta historia la conocí a través de 99% Invisible, el siempre recomendable podcast de Roman Mars y tiene mucho encanto. Trata sobre La cabina telefónica de Mojave, una cabina como las que ya apenas existen que estaba situada en un remoto...

Aprovechando el truco de hacer una lupa con una botella de plástico y agua Roman UrsuHack utiliza esas mismas lentes de coste cero para construir unas gafas de realidad virtual basadas en las Google Cardboard, tal y como explica en How...
Por Nacho Palou -
1 JUL 2016

Lighter Hacks de LXG Design muestra cómo construir una pistola de pegamento plástico, un punzón, un soldador de estaño y un cortador de poliestireno. Tal vez no sean las mejores herramientas del mundo, aunque el soldador de estaño parece bastante apañado,...
Por Nacho Palou -
30 JUN 2016
Hacer una lupa es una de las diversas ideas para reutilizar botellas de plástico de la serie de vídeos de Roman UrsuHack, que incluye propuestas para convertirlas en trípode para cámara, soporte para cepillos de dientes, redes, aislante para cables, canalones...
Por Nacho Palou -
18 JUN 2016

Todo esto es una forma extrema de explicar cómo funciona el electromagnetismo.– Joe / Arc Attack A una gloriosa velocidad de 11.000 fotogramas por segundo es fácil apreciar la belleza de una explosión electromagnética capaz de partir una lata de aluminio...

Este año se pudieron ver todo tipo de artilugios robóticos compitiendo en luchas de sumo, carreras y otras categorías.
En una extraña combinación entre lo moderno y lo vintage el artista Dmitry Morozov ha creado un híbrido con piezas antiguas y modernas para montar una curiosa máquina que realiza fotografías estilo selfi y las imprime en una viejísima impresora en...

A medio camino entre un superpoder mutante de los X-Men y el control de la Fuerza de los caballeros Jedi este invento de Nolan Moore es un guante de control remoto para drones, algo que ha dado en llamar UHID (Universal...
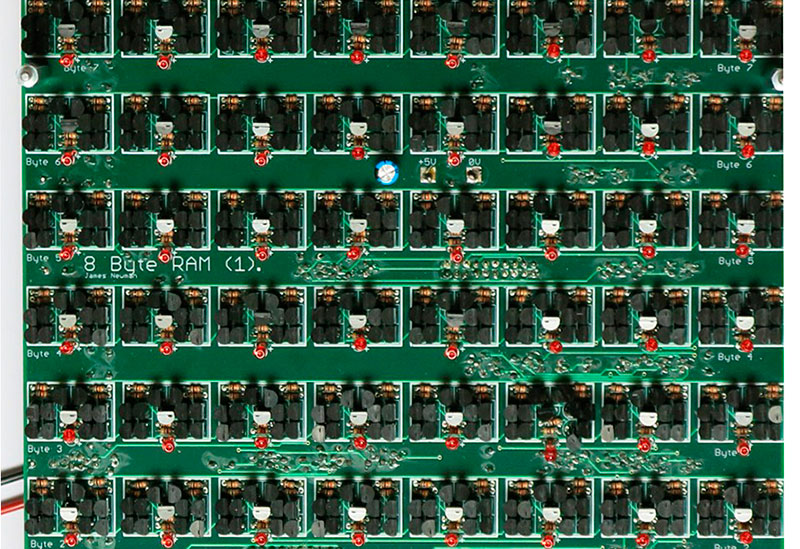
El Megaprocesador es un proyecto de geek loco de James Newman, que lleva años trabajando en ello simplemente porque (a) le da la gana y (b) ha pensado que «hacer grande lo pequeño» y mostrarlo con luces puede ayudar a mucha...

Este vídeo de Household Hacker muestra cómo construir algunos hackeos caseros con piezas de Lego, algo que está al alcance de cualquiera y que puede hacer algo más llevaderos los pequeños problemas cotidianos. Desde un sujetapuertas a un portaclips o un...

Dispuesto a escapar de cualquier situación de peligro con un lápiz, un clip y el envoltorio de una chocolatina –o algo más rústico todavía– MacGyver es un héroe de acción capaz de deshacer cualquier entuerto. Lo que viene siendo un hacker...
Propuesta de Michael Flarup. Debe ser un poco incómodo estar estos días en los zapatos de Ian Spalter, director creativo de Instagram. Ian es el responsable del cambio de logo de Instagram, tan criticado por tantos e incluso en algún caso llegando...
Por Nacho Palou -
16 MAY 2016
En Make It Real: Captain America Electromagnet Shield the Hacksmith construye algo parecido al brazalete electromagnético que utiliza el Capitán América en La era de Ultrón para que el escudo vuelva a su brazo sin tener que ir a buscarlo —...
Por Nacho Palou -
10 MAY 2016
La gente del proyecto Común Tierra trabaja en investigación sobre comunidades sostenibles en América Latina desde 2010. En el vídeo Carlos y Sonia, padres de la pequeña y preciosa Sonia, nos enseñan cómo fabrican bici-máquinas en Oaxaca (México) mediante hackeos de...
Un palo de esos de los helados es la base de este altamente rudimentario invento que sirve como sistema de «alerta temprana» cuando alguien tropieza con un cable o abre una puerta. Se puede usar en casa, en el campo o...
Esta miniconsola tiene cuerpo de Game Boy, pero dentro de su carcasa hay una Raspberry Pi capaz de correr emuladores de todo tipo de plataformas, así como un ingenioso adaptador para que la tarjeta SD funcione con la carcasa de plástico...
George Hotz, el hacker que construyó un coche autónomo en su garaje y en un mes, ha obtenido recientemente 3,1 millones de dólares de financiación para que desarrolle la tecnología que hace unos meses le permitió convertir su turismo convencional Acura...
Por Nacho Palou -
5 ABR 2016
Bloomberg Businessweek publicó este interesante artículo titulado How to Hack an Election en donde el hacker Andrés Sepúlveda explica cómo manipuló diversas elecciones en Latinoamérica durante casi una década. Merece la pena echarle un vistazo. ¿El método? Instalar malware en los...
En este vídeo Tom Scott narra una curiosa historia de hackeos respecto a la radio, el invento que cambió el mundo a principios del siglo XX. Mientras Marconi realizaba demostraciones y daba conferencias no dejaban de surgirle moscas cojoneras que investigaban...
El vídeo de Giaco Whatever muestra el proceso de construcción de un rotulador marcador Sharpie en este caso de aluminio. «Existen bolígrafos Sharpie de aluminio, pero no rotuladores, que son siempre de plástico», explica Giaco. La varilla de aluminio es la...
Por Nacho Palou -
30 MAR 2016
RambleBot es un pequeño vehículo robot que puede controlarse de forma remota a través de internet. Actualmente se encuentra en una fase entre el experimento y el prototipo y se puede comprar por 199 dólares en su configuración básica — más...
Por Nacho Palou -
21 MAR 2016
Cuatro días de trabajo, una Game Boy original, un montón de herramientas, una FPGA para adaptarla a un monitor VGA, un altavoz y un amplificador que tenían perdidos por ahí y mucha, mucha, habilidad y saber hacer fue todo lo que...
Un par de sopletes calientan el agua que hay en el depósito de cobre, el vapor producido se dirige hacia un pequeño motor de dos cilindros que tiene un motor eléctrico acoplado al cigüeñal. Cuando el volante del motor de vapor...
Por Nacho Palou -
18 MAR 2016
En un ejemplo de MacGyverismo extremo en el mundo de la supervivencia el conductor de North Survival –usando ese peculiar estilo del hacker ruso zumbao– explica cómo hacer fuego rápidamente con un limón. Tan solo se necesita: Un limón (grandecito) Pasadores...
AxiDraw es una máquina parecida a los plóter de toda la vida, pero resulta mucho más versátil que éstos: puede escribir en cualquier superficie plana utilizando cualquier tipo de instrumento de dibujo y escritura (rotulador, pluma, trazador, lápiz o bolígrafo, veleda...)...
Por Nacho Palou -
14 MAR 2016
Según cuentan en Man hacks Tesla firmware, finds new model, has car remotely downgraded, Jason Hughes accedió al sistema operativo de su coche eléctrico Tesla P85D y descubrió algo interesante: una referencia a un modelo P100D. Esto es, una variante o...
Por Nacho Palou -
9 MAR 2016
{Obvia decir que mejor ni intentar esto: el vídeo al parecer lo grabaron junto a un empleado de los ferrocarriles, corriendo el riesgo no solo de un cortocircuito y chispas sino también de estropear el tendido eléctrico y causar un «atasco...
La idea detrás de Brixo es sencilla: combinar las construcciones estilo Lego con el mundo de la electrónica. Las piezas tienen unos conectores especiales conductores de la electricidad; además hay piezas especiales como ledes, motores y sensores. Las construcciones con Brixo...
El vídeo Taking 5G to the sky de Ericsson corresponde a una demostración que pude ver en el MWC, relacionada con el vuelo remoto de drones. En este caso el vuelo del dron estaba controlado de forma remota a través de...
Por Nacho Palou -
2 MAR 2016
En How you can use Facebook to track your friends’ sleeping habits, Søren Louv-Jansen explica de qué manera es posible conocer cuáles son los hábitos de sueño de los amigos y contactos de Facebook; al menos, es verdad, averiguar los hábitos...
Por Nacho Palou -
1 MAR 2016

En una visita a la DEFCON 23, la conocida convención de hackers, Kevin Roose de Real Future preparó este videoreportaje acerca del tipo de actividades que llevan a cabo los hackers – demostraciones reales incluidas. Roose simplemente se acercó a estos...
Es un poco laborioso prepararla pero lo importante es que funciona y que además el cilindro principal es una lata de Pringles (AKA paraboloide hiperbólico). El MacGyverismo hecho papel: toda una máquina de cifrado Enigma como la utilizada por los nazis...
Estos cascos traductores a la «lengua droide» sirven como disfraz pero además llevan micrófono y auriculares. De este modo que todo lo que se habla se «traduce» a sonidos ambiente similares a los del idioma droide de los R2-D2s y BB-8s...
¿Qué sucedería si todas las diatribas en contra de los sistemas de cifrado y seguridad hubieran tenido su origen en una película de ficción? ¿Si se hubieran gastado millones y millones en defender a un país de amenazas imaginarias? ¿Si al presidente...
Llámense patatas Pringles o llámense paraboloides hiperbólicos su forma es exactamente la misma: la de una «silla de montar». Algunas de las curiosidades de esta peculiar forma es que se pueden apilar perfectamente pese a su curvo aspecto; el otro es...
Este reloj binario muestra las horas, minutos y segundos de una forma muy peculiar y en cierto modo avanzada: como «ondas», donde las crestas son unos y los valles ceros. Así que para leer la hora hay que convertir esas ondas...
El Google Play Market Retro, la App Store Retro y también la Mac App Store Retro son las versiones estilo PC con MS-DOS de finales de los años 1980 y principios de los 1990. No es sólo que la estética se...
Por Nacho Palou -
19 FEB 2016
The Malware Museum de Mikko Hypponen, en Archive.org, recopila algunos de los programas maliciosos, normalmente virus informáticos que se propagaban en los años 1980 y 1990 por los PC con sistema operartivo MS–DOS — aunque se echa de menos alguno mítico...
Por Nacho Palou -
18 FEB 2016
En la Retro Radio Farm (de Great Big Story) el bueno de Allen Chiang, un hombre analógico donde los haya, cuenta cómo ha encontrado una forma de hacer un buen negocio con sus conocimientos de electrónica. De hecho se autodenomina retro-granjero...
La idea es sencilla: conseguir un Furby de esos de nueva generación –que ya es un poco inquietante de por sí– y desmontarlo para programarlo. Estos chismes tienen un altavoz, micrófono, ojos que son pequeñas «pantallas», un pequeño motor y una...
Max Braun en Medium, My Bathroom Mirror Is Smarter Than Yours sobre la fabricación artesanal de un espejo para el cuarto de baño que funciona con Android y que muestra información —como la previsión meteorológica—, la hora o notificaciones directamente delante...
Por Nacho Palou -
3 FEB 2016
El rocódromo Brooklyn Boulders se convirtió en un videojuego experimental de escalada artificial con una idea de Randori, una pequeña empresa dedicada a los videojuegos. La idea es sencilla: se proyectan números, pistas y objetivos sobre la pared y los escaladores...
En Bloomberg, The First Person to Hack the iPhone Built a Self-Driving Car. In His Garage, Hotz mantiene sujeto el volante mientras que el escáner láser Lidar del Acura —que él mismo ha modificado en su garaje— representa en pantalla una...
Por Nacho Palou -
18 DIC 2015
En Business Insider, A programmer wrote scripts to secretly automate a lot of his job — and email his wife and make a latte, Uno de sus scripts compone un mensaje con el texto «sigo en el trabajo» + «algún motivo» elegido...
Por Nacho Palou -
24 NOV 2015
Fuego y cámaras superlentas, ¿se puede pedir algo más? Gav y Dan, los auténticos e inimitables Slow Mo Guys se entretuvieron en esta grabación, que incluía la generación de un mini-tornado artificial. Para generar y mantener el tornado utilizaron una docena...
Una de las más míticas escenas de hacking de la historia del cine… recreada con unos efectos y situaciones más realistas, incluyendo el Windows de la época. (Aguanta hasta 00:30…)...
Menos robots industriales, menos prototipos y menos habilidades inútiles… Lo que todos queremos son robots domésticos que realicen las labores cotidianas del hogar de forma eficiente: recoger y lavar los platos, limpiar la mesa o poner la lavadora, por poner algunos...
Del 1 al 5 de noviembre puede verse en YouTube en exclusiva CodeGirl, un documental sobre un grupo de chicas de secundaria que participa en un concurso de programación para mejorar la comunidad en la que viven mediante el uso de...
No es que vaya a reemplazar a las básculas de precisión pero… El resultado de este hackeo es ingenioso. De hecho aunque la balanza ni siquiera muestra el peso real de los objetos sí que da un porcentaje normalizado y un...
Todavía colean algunos vídeos acerca de la conmemoración del #BTTFday de ayer, como este de los chicos de la Universidad de Stanford, que modificaron un DeLorean DMC-12 para que hiciera trompos de forma autónoma. El resultado es visualmente interesante, mecánicamente atractivo...
Enviando órdenes «de voz» a Google Now «sin decir ni mú», señales de radio emitidas por la antena — Imagen: Wired. En Wired, Hackers Can Silently Control Siri From 16 Feet Away, Tal vez Siri y Google Now sean tus asistentes personales,...
Por Nacho Palou -
15 OCT 2015
Alberto es un lector habitual que nos escribió para contarnos una historia relacionada con una anotación que publicamos hace unos meses sobre un cubo dentro de un cubo dentro de un cubo fabricado en metal con técnicas de tornero. Según cuenta...
El bromista hacker de Sufficiently Advanced se ha fabricado una réplica del Mjölnir de Thor. Lo más divertido es que, fiel al espíritu de las leyes de los hackers y los superhéroes, al igual que le sucede al «original» sólo su...
USB killer v2.0, No te preocupes por el portátil, seguramente volverá a funcionar después de cambiar la placa base. ¿Alguien tiene un MacBook Pro para probar? Hace unos meses surgió la historia de una unidad USB maliciosa que podía freír un...
Por Nacho Palou -
14 OCT 2015
He aquí una vieja camiseta que hasta hace poco guardaba en el armario (la vendían en Think Geek, pero ya no) que de repente adquiere un nuevo e inquietante significado, naturalmente a raíz del escándalo por la modificación del software de...
Quien más quien menos habrá oído hablar alguna vez de Arduino, la plataforma de hardware y software libres con la que construir prototipos electrónicos de todo tipo. Comprarse el kit básico y juguetear con él incluso para los más simples experimentos...
Este guante de realidad virtual creado por Mirek Burkon no utiliza nada más que sensores inerciales: ni emplea ninguna tecnología parecida ni la del Leap o el Kinect ni sistemas de reconocimiento visual, que adolecen de sus propios problemas (ej. el...
Dicen que Hypernom es «como un Pac-Man en 4D» (para que se entienda) aunque en realidad es un explorador de objetos 4D en un entorno de realidad virtual o, técnicamente, un juego de orientación en S^3. Sí: hay pastillas que comer...
Uno de los peores problemas de las cámaras de vídeo son los movimientos bruscos en la imagen, saltos y traqueteos debidos a lo que sucede al desplazarse con ellas (al caminar, ir en coche, bici, etcétera). A este buen hombre se...
Todavía hoy los gráficos pixelados siguen resultando atractivos para mucha gente, especialmente para aquellos que vivieron el inicio de los gráficos por ordenador, e incluso son “objeto” de culto — y a otras muchas personas les causarán la risa. El vídeo...
Por Nacho Palou -
3 SEP 2015
En realidad pueden ser latas de cerveza como pueden serlo de cualquier refresco, pero las latas de cerveza son más bonitas y mucho más interesantes que ninguna otra. Como sea, para el caso que nos ocupa lo importante es que la...
Por Nacho Palou -
31 AGO 2015
A este paso al manejar el ordenador va a parecer que en vez de usar el ratón y el teclado estamos utilizando el poder de la Fuerza para cada pequeño gesto. Esta demostración está realizada con el sensor Leap y una...
Émile es el nombre de esta curiosa «máquina de bolas» emplea un sistema de tarjetas físicas y una placa Arduino para realizar una conversión binaria de 5 bits en letras y símbolos que pueden verse en una pequeña pantalla. En su...
Unos empleados del departamento de informática de la George Fox University se percataron de que había un montón de cajas de iMacs ya desembalados, listas para reciclar y aprovechando su peculiar forma truncada pensaron en si podrían montar una «gigantesca rueda»...
American Hacker publicó este vídeo estilo bricomanía en el que se explica cómo crear algo que proporciona un efecto «proyector de hologramas» visible sin gafas; es simplemente una pieza de plástico sobre la pantalla. La receta requiere: Papel milimetrado Una caja...
En Wired, Hackers Remotely Kill a Jeep on the Highway—With Me in It, Mientras los dos expertos en seguridad juegan de forma remota con el aire acondicionado, la radio y los limpiaparabrisas de mi coche desde su casa a unos 15...
Por Nacho Palou -
28 JUL 2015
Smith Corona Typewriter to Printer Hack describe el proyecto de convertir una máquina de escribir eléctrica Smith Corona Sterling 12 en una impresora. En el vídeo la máquina interpreta la sinfonía The Typewriter compuesta por Leroy Anderson en 1950 que se...
Por Nacho Palou -
29 JUN 2015
{¡Cuidadín! El intrépido «científico loco» que grabó estas demostraciones lo hizo sabiendo que son peligrosas y que requieren supervisión de alguien adulto – legal y mentalmente adulto, vamos. Por poner un par de ejemplos: manejar imanes tan poderosos tiene un gran...

El Self Repair Manifesto (en castellano: Manifiesto por la autorreparación) va a cumplir cinco añitos. Procede de la época en la que para dar una opinión al cuñao en el bar se publicaba un manifiesto: resúmenes altamente ingeniosos de una página...
Esta pedazo de máquina de pinball se llama Galactic Dimension y es un montaje entre lo técnico y artístico que funciona perfectamente. Se puede encontrar en el Museo de la Ciencia Phæno de Wolfsburgo, Alemania. Mide ni más ni menos que...
Desde MIOTtech nos llegó un tuit acerca de su MIOT, un «contador social», un panel informativo a la antigua usanza –de hecho combina madera, aluminio y metacrilato con un display mecánico– que muestra en tiempo real algunas métricas provenientes de Internet,...
Coffee Machine Vacuum Lightbulbs es uno de los muchos vídeo del tipo házlo tú mismo que tiene el usuario de YouTube Rulof Maker en su cuenta, y entre los que se incluyen desde un barco teledirigido a un cochete propulsado con...
Por Nacho Palou -
17 MAY 2015
Philippe Chrétien buscó financiación colectiva para fabricar una idea, el Reloj Fibonacci, y ya hay miles de personas interesadas que han multiplicado por 20 sus expectativas. Este reloj sirve incluso como lámpara, aunque básicamente es un artilugio para marcar el paso...
Este teclado de piano bananero está creado con un poco de papel aluminio, un Arduino Nano, Clojure y el sample de piano de Overtone. El papel sirve para hacer de toma de tierra; las bananas –probablemente también funcionaría incluso mejor con...
Esta curiosa «pantalla de Lego» muestra letras en una matriz de 5×5 a partir de la información preparada en una especie de tarjetas perforadas (o más bien, «resaltadas») también construidas con placas y pequeñas piezas de Lego. Un ingenioso mecanismo va...
Un ingeniero hacker llamado Seth Wahle se implantó en su mano izquierda –entre el pulgar y el índice– un chip con una antena NFC para poder acceder de forma inalámbrica a sistemas de seguridad y dispositivos inalámbricos de todo tipo. Entre otras...
Moon Phases es una instalación interactiva fabricada con Arduino, botones circulares, una linterna, una pequeña maqueta de la Luna y muy buen estilo. Basta elegir la fecha para que la máquina coloque la Luna en posición; la lámpara led se encarga...
Este instructivo vídeo de MFH cuenta con voz robótica y explicaciones simples cómo construir una mini-bobina de Tesla, que no es sino un tipo de pequeño transformador capaz de ionizar el aire y producir efectos tan curiosos como encender una bombilla...
Dentro de un mes, los días 28 y 29 de abril, se celebrará en Madrid el evento Mundo Hacker Day 2015, que reunirá a unos 1.500 expertos en seguridad de todo el mundo. Explorando el universo de la seguridad, los hackers...
En Backchannel, Steven Levy recupera una de las cuestiones más debatidas del mundo de la informática, la tecnología y el conocimiento en general: ¿Qué es un hacker? ¿Genio? ¿Vándalo? ¿Solucionador de problemas? Por aquí publicamos hace más de una década lo...

Mañana se estrena esta nueva serie de la Fox de la franquicia CSI (Crime Scene Investigation), en este caso situada en la darknet y la web profunda. Seamos claro: o la amaremos o la odiaremos, porque tiene el típico problema de...
Este invento/hackeo del que no hay mucha más información según parece emplea un proyector y diversos sensores de una Xbox para ir modificando el aspecto del terreno según lo que se hace con la arena: algo con mucho potencial en sistemas...
Maurits Martijn en Medium, Quizá no es buena idea que leas esta historia usando un wifi público, Vamos a un tercer café. La última petición que le hago a Slotboom es que me muestre lo que él haría si en realidad quisiera...
Por Nacho Palou -
7 FEB 2015
Fotografía Wired / Lizzie Wade En Wired, Donde no existen redes celulares la gente está construyendo las suyas, La torre —que Hernández, el herrero, forjó con chatarra hace apenas unas horas— es la columna vertebral de la primera red de telefonía celular...
Por Nacho Palou -
14 ENE 2015
Este clasificador de M&M/Smarties/Skittles funciona con un motor que hace dar vueltas a los dulces hasta un tubo, que son examinados mientras caen con la cámara de un iPhone, que envía la señal a través de Bluetooth a un módulo Arduino...
No es el monopatín volador Hendo ni mucho menos es el de Regreso al Futuro, pero éste monopatín volador o hoverboard construido por Ryan Craven tiene su punto MacGyver y funciona más o menos igual, al menos conceptualmente, y probablemente por...
Por Nacho Palou -
16 DIC 2014
El iRobot: Create 2 es una especie de Roomba hackeable, algo así como un Lego Mindstorms pero en forma de robots casero móvil, como el espíritu –y la forma– propias las simpáticas aspiradoras circulares que lleva años fabricando iRobot. Lo mejor...
¿Harto de perder a menudo el mini-mando a distancia por culpa de los niños de la casa? Más primitiva la solución, imposible. (Visto en A Brilliant Solution.)...
Como puede verse en el vídeo la técnica consiste en recargar el móvil con una pila de 9 voltios estándar. Pero los USB funcionan a 5V, no a 9V. La forma de hacerlo es usar un cargador de coche y una...
Una buenísima noticia para cualquiera que esté interesado en la historia de los hackers españoles: Hackstory, el impresionante trabajo de Mercé Molist que recopilando su historia, está ya disponible para su descarga como libro electrónico en multitud de formatos. La descarga es...
La idea es la siguiente: compras en la tienda de todo a un euro unos cuantos hula-hops (seguramente acabarás con el inventario) y los cubres con algún material oscuro que transmita bien el calor. ¡Al agua! Cuando no uses la piscina...
Esta instalación interactiva de Niklas Roy se llama Acelerador de Pelotas Esponjosas Neumático; en total hay unos 150 metros de tubos neumáticos para mover unas 1.000 pelotas de un lado a otro. Es parecido a otro succionador de bolas que ya...

Este chismático llamado The Wormhole Actualization Machine (La Máquina de Actualización del Agujero de Gusano) es un proyecto artístico de Alan Watts. Construido con leds, un espejo infinito y grandes botones de colores a lo Star Trek, es tan «creíble» como...
Ben North y su hija de 7 años crearon este pequeño proyecto consistente en un robot que juega a Simon y es capaz de derrotarlo. Como los lectores recordarán sin duda Simon es ese juego de memoria de finales de los...
En el vídeo se ve y se explica paso a paso el proceso para «transferir» una fotografía impresa con una impresora convencional de inyección de tinta en superficies como madera. Básicamente se imprime la imagen invertida (especialmente si tiene texto) sobre...
Por Nacho Palou -
30 ABR 2014
Ya hemos mencionado en algunas ocasiones Hack Story, el wiki en el que Mercé Molist ha ido recopilando la historia de los hackers españoles. Pero si quieres una introducción al tema, incluyendo una explicación de por qué no se debe usar el...
El viernes y el sábado 9 y 10 de mayo, en el MediaLab-Prado de Madrid tendrá lugar el EcoHack World, un encuentro sobre Cómo usar la tecnología para entender mejor nuestro entorno, creando inventos que tengan verdaderamente impacto, sin ningún tipo...
Este reactor construido con plástico 3D no sé yo si propulsará mucho o poco, pero instructivo resulta un montón. Y suena mejor que los delfines en celo esos....
En IFixIt lo venden en forma de kit y además bartito (6 dólares): Action Hero Toolkit, una caja de «herramientas» con las que cualquier aspirante a MacGyver podría sobrevivir en una isla desierta behind the musgo, asaltar una base de lanzamiento...
En Phys.org, Can you drive fast enough to avoid being clocked by speed cameras? Cualquier conductor puede evitar que le cacen los radares de carretera — lo único que tiene que hacer es respetar los límites de velocidad.Pero estos estudiantes de física...
Por Nacho Palou -
25 MAR 2014
Probablemente te comerás las palomitas más rápidamente de lo que se hacen; pero oiga, que no falten palomitas en el Apocalipsis....
Por Nacho Palou -
19 MAR 2014
The Open Enigma Project es una educativa forma de entender las máquinas Enigma y aprender algo de matemáticas, criptografía e historia, construyendo una desde cero. La máquina utiliza cables, leds y muchos interruptores; su núcleo es una placa de Arduino pero...
Esta genial «tarjeta de visita» se llama Arduboy y ha sido creada por Kevin Bates como hackeo para mostrar no solo su habilidad sino también las posibilidades de los pequeños circuitos Arduino. Además de servir para jugar un rato al Tetris...
Este gran hackeo de Cloud Tea Studio se llama Flappy Bird Bot; es un pequeño brazo robótico que juega al Flappy Bird original. Está dividido en tres partes: reconocimiento visual, control y mecanismos. La visión la obtiene con una webcam y...
Me pareció brillante este hackeo del MundoReal™, por sencillo y aparentemente efectivo, que encontré en Advice to young parents, vía LifeHacker. Resuelve, con un bote de champú convenientemente recortado, el clásico problema que tienen los niños para llegar al agua del...
Por Nacho Palou -
28 FEB 2014
Con algo de habilidad, programación y un soldador, Franci Kapel hackeó un ratón óptico de Logitech para hacer que la pequeña cámara que contiene —como todos los ratones ópticos— funcione como una diminuta webcam*, con una resolución de 15 x 15...
Por Nacho Palou -
21 ENE 2014
Las cosas, aunque sean simuladas, hay que hacerlas bien. En vez de simplemente hacer el ridículo simulando programar (Asdsahhre kmasdiomjnn, grrfff, worrhrfff) como recomienda el Ministerio de Educación y Cultura, puedes «escribir» «verdadero» código con HackerTyper. Tac, tac, tac… Ideal para...
Hechos a mano, sirven para abrir cerraduras. (Vía Boing Boing.)...
El juego de la vida de Conway. (Salta a 01:10 si ya conoces las reglas) En el peculiar mundo computacional de los autómatas celulares el juego de la vida de John H. Conway ocupa un lugar destacado y por méritos propios....
John de Mental Floss rescata con este vídeo la más pura ciencia empírica de lo cotidiano para confirmar como válidos o descartar como grandes FAILs ni más ni menos que 30 «truquis» en 10 minutos. La mayor parte tienen que ver...
(Para ansiosos: se puede mirar un poco el vídeo y saltar a 02:50 para ver cómo funciona y en 05:10 el efecto). Estos colegas aprovecharon un trabajo que tenían que hacer para montarse una especie de mini-habitación giratoria. Lo complicado del...

«Trivial», dijo Starbug – el hacker que ha ganado el premio. Ahora con todo el proceso al completo con un vídeo decente. Mejor que la gente use TouchID solo por comodidad, que no por seguridad (…) No critico a Apple, pero...
IsTouchIDHackedYet.com ? Ni dos días ha resistido: La seguridad del iPhone 5s, en entredicho a las 24 horas de ponerse a la venta, un artículo que he preparado para RTVE.es explicando los detalles. Los hackers del CCC siguen siendo unos auténticos clásicos....
¿Se puede crear una máquina capaz de jugar al ajedrez con un programa de 3,5 KB y tan solo 224 bytes de RAM? Aparentemente sí: se llama PIC Blitz y tiene hasta un pequeño libro con 44 líneas de aperturas y...
IsTouchIDHackedYet.com responde a la pregunta en forma de concurso / reto: de momento la respuesta es No pero un montón de gente está haciendo aportaciones para premiar a quien consiga hackear el botón TouchID y grabar un vídeo de cómo saltarse...
Los bristlebots son pequeños robots vibradores cuyos componentes son la cabeza de un cepillo de dientes, un micromotor y una pila botón. Basta pegar el motor al cepillo, asegurarse de que el voltaje de la pila coincide y soldar algunas conexiones....
La gente suele pensar en rms como en el filósofo del que surgió la idea y en mi como el ingeniero que fue capaz de ponerla en práctica.– Linus Torvalds No habíamos mencionado por aquí hasta ahora un «documento histórico» titulado...
Como seguramente no habrás podido estar allí, reserva un par de horas y prepara las palomitas porque este es el documental completo de los cuatro días de conferencia DEFCON, de la mano del archivista Jason Scott (el de Textfiles.com). Baste decir...
Desde el departamento de los dispositivos más inútiles del mundo nos llega una versión revisada y tuneada de famosa máquina definitiva de Claude M. Shannon. Hay que ver el vídeo completo porque hay sorpresas hasta el final....
Si eres de los que siempre ha querido pasarse por alguna de las Maker Faire que organiza la revista Make, esta llega ahora a España en su versión Mini Maker Faire, que es la marca bajo la que estas ferias se...
Toda una suerte encontrarse de casualidad con Woz en el aeropuerto y que además acceda a dejarse grabar en una pequeña mini-entrevista con sus impresiones sobre iOS 7, Prism y otras cuestiones más mundanas – pero no por ello menos importantes:...
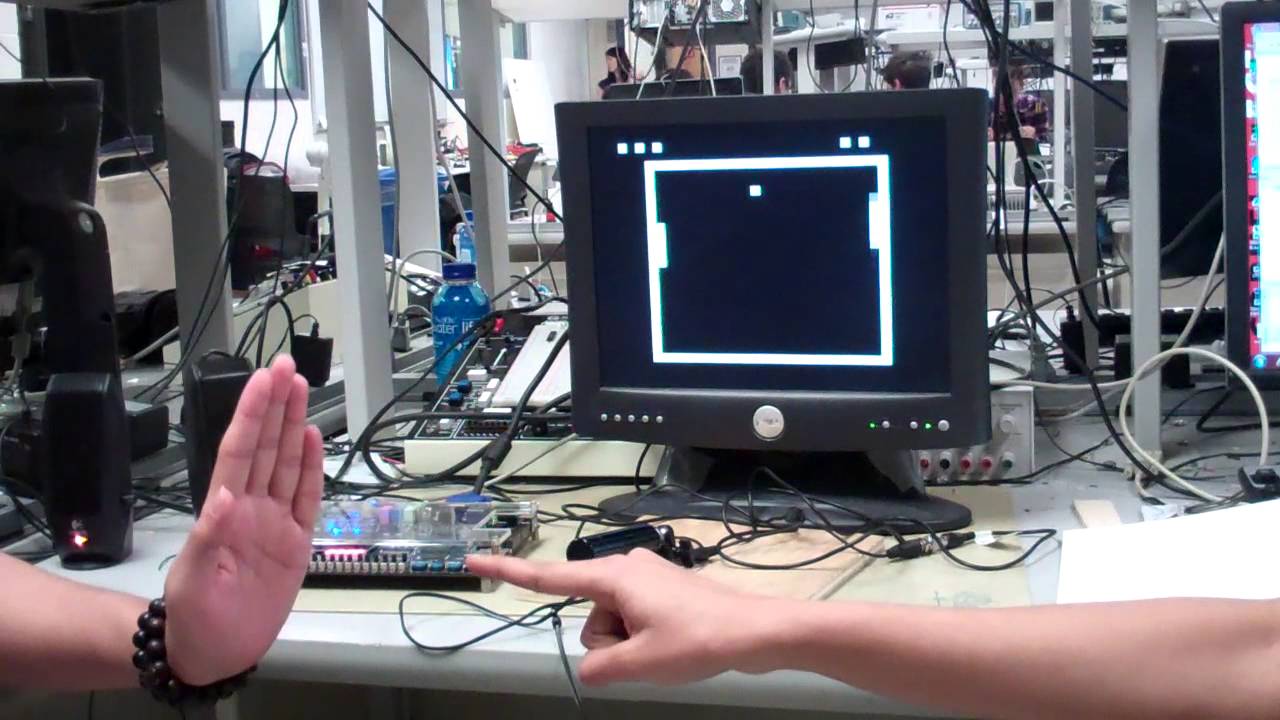
El proyecto Hand Tracking Pong consiste en recrear el famoso juego de tenis pero con una interfaz física: los movimientos de las palas se hacen con la mano, mediante reconocimiento visual a través de una cámara de vídeo. El resto es...

Todas las películas con escenas de hackers reunidas en un videoclip con la apropiada música electrónica de Eclectic Method....
La idea es capturar todas las imágenes posibles de escenas normales y corrientes fotografiadas con los coches de Google para su Street View y luego montarlas con habilidad mediante un software diseñado a medida; el resultado del experimento cuando se añaden...
La idea de este proyecto es sencilla; llevarlo a cabo no tanto. Veamos: se trata de meter una cámara de vídeo dentro de un paquete postal, con una rendija a través de la cual poder grabar y luego ver cómo es...

En esta ocasión el mini-documental de Off Book de la PBS está dedicado a la ya tradicional diferencia entre «hacker» y «cracker», explicando los orígenes de los términos y por qué los periodistas acabaron liándola a mediados de los 80. Con...
El Lomo-cóptero es un extraño híbrido entre un helicóptero multirotor y una cámara fotográfica Lomo Diana F+. Un montón de tecnología relativamente complicada -incluyendo un visor, transmisión de imágenes y radiocontroles- para hacer fotos... en película de 120 mm. Un gran...
Este ajedrez construido con Arduino permite jugar de forma inalámbrica con solo mover las piezas. El tablero es un poco grande, para que puedan moverse sin problemas todas las piezas incluyendo los caballos, se puedan retirar las piezas capturadas, etcétera. Imanes,...

¡Alehop! Si nunca has visto funcionar una cerradura «por dentro», no te cansarás de verlo. Es así de simple, pero también complicado a la vez. Esta vieja animación es de Stian Berg Larsen y muestra en acción una típica cerradura de...
vs. En fin: el hackeo casero para abrir la puerta del garaje con un iPhone está bien como idea y tiene su mérito, pero sus reminiscencias con 2001: Una odisea del espacio por desgracia nos devuelven al contexto actual: nada de...
Interesante concepto este de Darren Jones de combinar un Raspberry Pi (uno de los más populares ordenadores miniatura «pelaos», ~30€) con una pantalla plana DVI barata y el software emulador MAME para Linux. El conjunto se puede meter con la alimentación...
Leonardo asentiría orgulloso: este hipnótico vídeo de un circuito de madera con canicas que ruedan simplemente por la fuerza de la gravedad es a la vez intrigante y inexplicablemente emocionante. En cada fase hay un nuevo pequeño reto o mejora, incluyendo...

Pocos entretenimientos matemáticos hay como el Juego de la vida, ese sistema de autómatas celulares de absoluta simpleza y a la vez increíble complejidad creado por John H. Conway en 1970. Ahora Stephan Rafler ha creado SmoothLife, una interesante «generalización» que...
Ryan Challinor, un programador del M.I.T. creó este hackeo para el Music Hack Day: consiste en un monitor de corazón que mide la frecuencia cardíaca; con eso se controla el tempo de una canción (su «velocidad», digamos); de este modo variando...
¡Cuidado que engancha! Se llama The Infinite Jukebox y es un precioso hackeo creado por Paul Lamare con motivo del Music Hack Day organizado por el M.I.T. en Boston; el típico evento que congrega y conecta a programadores y hackers de...
Un invento que debería ser de alta tecnología ejecutado con la muy baja tecnología de una aspiradora normal y corriente: un escáner que pasa las páginas antes de explorarlas y archivarlas. La idea es de Dany Qumsiyeh, un ingeniero hacker que...
¿Cómo descifran y rompen los hackers la seguridad de las tarjetas de transporte público? (en RTVE.es). Desde el truco del cartoncillo en los bonobuses al descifrado del contenido de los chips NFC/RFID de las tarjetas actuales, pasando por copias de bandas magnéticas,...
El Dyskograf es un curioso experimento músical, en el que basta dibujar con un rotulador sobre un disco para crear música. El disco gira como los vinilos en un tocadiscos que realiza una lectura óptica de la música, combinando instrumentos según...
Nunca se sabe cuándo vas a tener que utilizar estos conocimientos, pero el saber no ocupa lugar: cuáles son los PIN secretos más habituales en tarjetas de crédito y probablemente en cajas de seguridad, candados, teléfonos y similares. Según un estudio...
Quien tenga unos miles de euros para gastarse y trabaje en diseño industrial, ingenería, arquitectura o simplemente sea un chiflado del hágalo-usted-mismo encontrará interesante la nueva Replicator 2 de la gente de MakerBot: una máquina para imprimir objetos. Es una impresora...
Como se explica en el vídeo, el secreto es conseguir que el agua forme una lente en la que la curva sea una parábola perfecta. Un plástico de cortina de baño puede valer. Hay que hacerlo al mediodía, con el sol...
Este trabajo de fin de curso titulado Hacking Hope es una recreación visual y musical combinada con frases y apuntes, datos y curiosidades acerca de esa peculiar relación que mantenemos los seres humanos con las máquinas que nos rodean. Comprenderlas, entender...
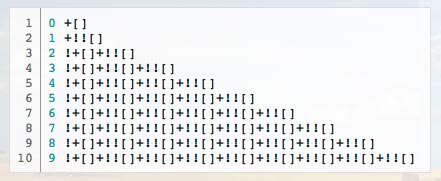
Patricio Palladino escribió acerca de cómo se puede recrear cualquier JavaScript a partir de ocho caracteres distintos, más concretamente ()[]{}!+ El resultado es un código en cierto modo minimalista pero que está muy lejos de ser óptimo; más bien algo bastante...
¿Sabes esos paneles que todavía hay en algunos lugares públicos y carreteras, que están formados por grandes píxeles en blanco y negro? Funcionan con electroimanes y son bastante binarios; no son tan modernos como las pantallas LED, pero todavía se les...
StanleyPiano, también conocido como @StanleyPiano es un piano interactivo creado por Digital Kitchen que funciona a través de Twitter; se le podían «pedir canciones» chateando con él; durante un fin de semana tocó toda esa música en el Block Party de...
Por si había pocas celebraciones -así, en general- llega una nueva, sin duda la más interesante para nuestros lectores y sus respectivas versiones 2.0 también conocidas como mini-,o descendencia o, más popularmente, hijos: el Día de los padres geeks, los apasionados...
Los hackers originales del MIT eran unos tipos a los que les apasionaba saber todo lo posible de las máquinas que usaban por el placer de saberlo, y si para saber algo más había que saltarse alguna norma pues no tenían ningún...
Quienes gusten de aumentar su nivel de adrenalina y ansiedad mediante emociones fuertes no tienen más que seguir a @PrimaRiesgoBot, un bot de Twitter que cada 10 minutos pía con el valor del diferencial de deuda entre los bonos alemanes y...
Reconozcamos que muy estable no se ve, pero alguien tenía que inventar lo que han dado en llamar «la bicicleta anfibia», que es básicamente una bici encima de una lancha hinchable. La idea además es que funcione con un motor eléctrico,...
Lo prometido es deuda; la bestia en acción. Dice Rob, su creador, que el ruido es tan atronador que para el vídeo tuvo que bajar el sonido al 5 por ciento del original....
Rob de dɸ/dt ha pensado que sería buena idea construir una bobina Tesla portátil y diseñarla y configurarla a modo de rifle. El resultado es The Tesla Gun, y seguro que el propio Nikola Tesla asentiría orgulloso ante su conveniente existencia...
De nombre extraño y misteriosamente sonoro, Hartverdrahtet fue el ganador del concurso PC 4kB. En ese concurso de programación el software presentado deben ocupar 4 KB de código fuente como máximo. El original funciona en Windows XP/Vista/7 y de su ejecución...
SevenBlocks rinde homenaje a los visualizadores de siete segmentos, esos bloques de dígitos con los que construimos relojes e indicadores numéricos de todo tipo. Su peculiaridad es que tiene un corazón mecánico, que incluye motores, servos y diversos mecanismos ingeniosos, ayudados...
El documental Liberad la Red [Free the network, 30 min. Inglés subtitulado en español] repasa los eventos de la ocupación de Wall Street el pasado mes de septiembre. Pero está planteado desde el punto de vista de Isaac Wilder y de...
Por Nacho Palou -
13 ABR 2012
Esta máquina casi infinita realiza 300 pasos distintos de todo tipo para lograr un objetivo trivial: inflar y pinchar un globo. La han creado entre la Purdue Society of Professional Engineers y la Society of Hispanic Professional Engineers de Estados Unidos....
Hacker [originalmente, alguien que fabrica muebles con un hacha] n. 1. Persona que disfruta con la exploración de los detalles de los sistemas programables y cómo aprovechar sus posibilidades; al contrario que la mayoría de los usuarios, que prefieren aprender sólo lo...

Desde el departamento de vídeos entrañables nos ha llegado la historia de Caine Monroy, un pequeño hacker de 9 años al que le encanta construir máquinas recreativas de cartón con todo lujo de detalles. Es tal su habilidad y buen arte...
Este ingenioso tablero de ajedrez robótico a distancia permite que dos jugadores echen una partidita aunque estén separados miles kilómetros de distancia, en tiempo casi real. Porque, reconozcámoslo, una cosa es jugar pantalla-a-pantalla y otra muy distinta hacerlo con un tablero...
La receta es un Lego Mindstorms + una duplicadora de discos vieja comprada en eBay + Arduino + una cámara para fotografiar las cubiertas + algunos motores y… ¡listo! Un conversor de disquetes de 3,5” DD de Amiga a volcados en...
Son ganas de hacerlo más difícil todavía, pero… Un chaval de 16 años ha creado una calculadora en el mundo virtual de Minecraft, que funciona a la perfección, tal y como puede verse en el vídeo. Tiene seis dígitos para uno...
Peticiones para comprobar el estado de los contactos + script en Perl + lista de teléfonos registrados en España al completo = gran hackeo. Según esta suerte de war dialing móvil masivo, 9.832.654 terminales móviles españoles tienen WhatsApp instalado....
Esto es un poco como los códigos para hacer trampas en los videojuegos pulsando «Arriba-Arriba-Abajo-Fuego mientras mantienes apretado Start con A y B a la vez»… Lo han publicado en Wired con el curioso título Prepare for Liftoff With Automotive Cheat...
Ahora que vienen unos cuantos días de asueto y se puede dedicar algo de tiempo a hacer experimentos y juguetear con cacharritos puede ser buen momento para revisar Arduino, el documental (2010), un repaso rápido a la historia del popular sistema...
Aviso: esto ya ni siquiera funciona, pero lo intrigante es el concepto. Hace tiempo alguien pensó que podría ser toda una idea crear un Google al revés, en el que las páginas menos relevantes fueran las primeras. Esto además evitaría toda...
Mmm… Repasemos las noticias de hoy, a ver… clic, clic… Investigadores alertan que las impresoras se pueden hackear para que ardan en llamas (Fayerwayer) Pse, lo habitual, nada alarmante. Ilustrativa foto, por cierto…...
genera… Es endiabladamente enrevesado, pero alguien se ha entretenido en programar una visualización del conjunto de Mandelbrot en Python (ofuscado), de modo que el código de arriba, con ese formato tan curioso, genera la imagen de abajo: toda una delicia recursiva...
Qué hacer si accidentalmente acabas esposado con unas bridas de plástico. Desde el departamento de Superpoderes Prácticos que Nunca Sabes Cuándo vas a Poder Necesitar -pero que vienen bien en estos tiempos convulsos- llega este práctico y educativo vídeo sobre cómo...
Tesla aprueba esto, pero yo no lo haría en casa si fuera vosotros, niños: básicamente consiste en recopilar un montón de pilas de de 9 voltios usadas y encastrarlas unas con otras de modo que los voltajes se sumen. Jeremy de...
El ingenioso protagonista de esta historia vive en una casa cerca de las vías del tren. Ha construido con Arduino, una webcam y algo de software libre un mecanismo que cierra las ventanas antes de que el ruido entre en la...
En CV Dazzle explican cómo camuflarse para que las modernas cámaras de videovigilancia que hay en muchas ciudades y los algoritmos de reconocimiento automático de Facebook, Picasa y otros servicios web no puedan detectarte. El truco consiste principalmente en utilizar peinados...
Mundo Hacker TV, que nació en la radio para luego saltar a la televisión por Internet a través de Globbtv, ahora va a poder llegar al gran público en Telecinco a través de Nosolomúsica. Será con cuatro programas especiales que se emitirán...
Si Claude Shannon levantara la cabeza y viera su máquina definitiva dando vueltas por Youtube… Los dispositivos más inútiles del mundo, gran recopilación...
Tras miles y miles de dólares e innumerables horas invertidos en su hobby, Chris Burden completó el montaje de Metrópolis II, una combinación de arte y mecánica que puntúa muy alto en el espíritu hacker original. En el vídeo se cuenta...
Mientras que una persona normal simplemente daría vueltas hasta encontrarlo –tal vez llamándose a sí misma para localizar el ring– un geek lo haría además de forma más tecno-científicamente eficiente: lo tendría programado de antemano con un tono de ruido blanco que...
No tenemos ni idea de si esta oferta de trabajo es actual, antigua o si sigue en pie, pero nos la pasaron por correo como altamente creativa y ciertamente que lo es: simbiotica.es/oferta Casi a la altura de las mejores ofertas de...
MiFirma.com. Con el DNI electrónico. Si va a resultar que, al final, al final… el DNIe va a servir para algo. Hacia la revolución de las firmas digitales, algunas ideasComienza la distribución gratuita de lectores de DNI electrónico (2009) Así es...
«¡Wow! Ya sé hackear…» Y no es Matrix, es Hacker Typer. (Agradecimientos a Jon y Roberto por el enlace y un *warning*: la web en cuestión ya murió de éxito y puede volver a hacerlo. En ese caso… Insert disk and...
Anillo modelado con la impresora 3D de Veloso Espectacular la resolución y precisión que logra la impresora 3D artesanal construida por Veloso, capaz de modelar formas de hasta 50 micrones. Eso sí, la tarea requiere su tiempo: 3,5 cm por hora. El...
Por Nacho Palou -
4 ABR 2011
The Most Useless Machine, de John Williams es una versión elegante de la famosa máquina definitiva de Claude M. Shannon, basada en una idea de Marvin Minsky, y de la que existen diversas encarnaciones. Tiene el plus de la autorreferencia y...
Kinect-Controlled Tesla Coils: The Evil Genius Simulator. ¿Dónde sino en una Maker Faire, en este caso Maker Faire UK 2011, se pueden controlar un par de bobinas Tesla con un Kinect convertido así en un Simulador de Genios Malignos? Pues eso....
En los últimos tiempos distintos estudios han puesto en evidencia la relativa vulnerabilidad informática de los vehículos modernos. Aunque la incorporación de ordenadores -una berlina moderna puede sumar hasta casi un centenar de centralitas- supone mejoras en la seguridad, el funcionamiento y...
Por Nacho Palou -
14 MAR 2011

Este artículo se publicó originalmente en Cooking Ideas, un blog de Vodafone donde colaboramos semanalmente con el objetivo de crear historias que «alimenten la mente de ideas». Continuando con la saga de las soluciones de baja tecnología que mediante un poco de...
La cutre-caja de madera no hace justicia a este «montaje», por llamarlo de alguna forma: un sistema de almacenamiento casero de 70 terabytes de capacidad, armado con otros tantos discos duros enfriados con 20 ventiladores. Un curioso hackeo que habría que...
Paper processor: un ejercicio práctico sobre cómo funcionan las CPU, explicado con papel y tijeras, lo que viene siendo a manubrio. Una ingeniosa y educativa forma de introdocirse en el mundo de los sistemas digitales, por Saito Yutaka. (Vía Hack-a-day.) CARDIAC,...
Tiene su mérito: PS-HTTPD es un servidor web simplificado escrito en Postscript, el «lenguaje de las impresoras». Es como hacer que un microondas sirva para reproducir música: tan poco práctico como divertido. Un gran hackeo. (Vía CyberHades.)...
Dicen que las limitaciones son la fuente de la creatividad, y en este caso todo eran limitaciones para un gran hacker. La imagen de arriba es de ZX-81 Chess, el que algunos consideran el mejor programa de ordenador jamás escrito. Y...
De todos los ingeniosos complementos para iPad al estilo «hágalo usted mismo» que han circulado por ahí decidí construirme este soporte a base de lápices de Geeky Gadgets (vía Gadget Lab) tan funcional como elegante, que requiere únicamente algo de material...
A Short History of Hacking es un resumen altamente comprimido de la historia del hacking (a lo que habría que añadir más apropiadamente y del cracking, por aquello de los matices). No conocía la mención que hacen a que fue John...
El número de mayo de Wired llevaba este entrañable artículo sobre hackers: Geek Power: Steven Levy Revisits Tech Titans, Hackers, Idealists, donde el mismísimo autor del clásico libro Hackers: Heroes of the Computer Revolution (1984) revisa lo que sucedió con los...
Los hackers de equipo de Panic fueron capaces de conectar un iPad con un Apple IIe para enviarle datos; hay una separación temporal de 28 años entre ambos equipos, lo cual tiene mérito. El asunto era todo un reto y lo consiguieron...
Desde el departamento de cómo no se me habría ocurrido a mi esto antes llega una de las mejores soluciones de la temporada para un problema cotidiano. La idea es de pojken, un lector de Lifehacker, que envió una foto explicando...
Un organizador de cables tan simple, efectivo y barato como localizar algunos clips de esos que andan perdidos los cajones de casa o de la oficina. ¡Gracias Elenita por iluminarnos con tan genial solución de baja tecnología!...

A Turing Machine es una Máquina de Turing hecha realidad. Su creador pensó que sería divertido construir físicamente la máquina teórica concebida en la mente del pionero de la computación Alan Turing y se puso manos a la obra. Hablé algo...

Si hay una forma de revivir un chisme de baja tecnología en otro de alta tecnología, este es un magnífico ejemplo: cómo convertir una vieja máquina de escribir Smith Corona de los años 40 en un teclado USB y conectarla a...
Si no lo veo, no lo creo: Los insurgentes de Irak utilizan decodificadores de televisión por satélite para interceptar las imágenes de los vehículos no tripulados de los EE.UU. Al parecer basta una antena parabólica, un decodificador como los de la...

Ni siquiera dicen cuánto llega a durar este cargador USB casero, ni hasta qué punto tiene una utilidad real, pero lo importante es el conceto y el factor hackeo MacGyver: que con una pila de 9V, un regulador barato (conector para...
No sabía que se podían hackear con gominolas los sistemas de autenticación biométrica de huellas dactilares, pero me parece todo un avance y un «memorable hackeo», como dicen en Security by Default. Al parecer se publicó sobre esto en 2002 bajo el...
Buen truco de baja tecnología este que comentan en Lifehacker: Cómo identificar de que lado va un conector con una gota de pegamento. Sirve para todos esos conectores ambiguos en los que la prioridad de ley de Murphy implica no acertar nunca...
Al parecer alguien con tiempo libre y afición a Juegos de Guerra que trabajaba en un servicio de alojamiento de webs dedicó un buen rato a construirse un indicador DEFCON funcional. El chisme lleva el clásico indicador digital que varía según...
Desde ayer he comenzado a participar de forma habitual en La Sábana, el magazine nocturno de Canal Extremadura Radio dirigido por José Antonio Moreno y perpetrado junto a un montón de colaboradores, a cual más divertido. Me invitaron muy amablemente a contar...
Los chicos de Evil Mad Science crearon una matriz con 625 LED de colores llamada Peggy 2, que se puede programar fácilmente, para mostrar textos o efectos visuales. Además, si se pone un plástico encima del os «superpíxeles» se obtiene una...
Ver vídeo: Mini-Pinball Machine!!!! Mini-Pinball Machine [2 min.] Hay quien dice que el VHS está acabado, pero a Dios pongo por testigo que el otro día estuve con alguien que compró unas cuantas cintas vírgenes en el Saturn, así que… no sé...
Un impresionante agujero de seguridad en Twitter hace que se puedan publicar mensajes como si fueran de otra persona en una cuenta ajena; el problema ya se conoce hace días pero en Twitter todavía no lo han podido corregir: el método es...
¡Bonita foto! Pues tiene más mérito de lo que parece: la consiguió hacer Jean-Sébastien Busque desde un globo «casero» que se elevó hasta 90.000 pies de altura (28 kilómetros) ni más ni menos, casi llegando al límite de la estratosfera. Esta...
WonkaPistas adelantó información de un sondeo político del CIS un día antes de que fuera público. No es que hubiera ninguna conspiración, filtración, «piratería» ni historias raras: fue pura suerte, como posteriormente reconoció. Simplemente se fijó en que las direcciones de Internet...
Alberto me envió un enlace a la página del simpático µWatch, un reloj de pulsera medio retro medio futurista calificado apropiadamente como «El símbolo de estatus nerd definitivo». Además de dar la hora es una calculadora científica programable, inspirada en la...
Interesante historia sobre uno de los más comunes sistemas de seguridad web: Hackers completely break SSL using 200 PS3s. El sistema que «rompieron» es el SSL (Secure Sockets Layer, Protocolo de Capa de Conexión Segura) más comúnmente conocido como «el candado de...
Este descubrimiento que vi pasar hace tiempo por LifeHacker me encantó: resulta que las baterías de 9 voltios están hechas con seis baterías AAAA de 1,5 voltios. Me dejó entre sorprendido y maravillado, tal es la simpleza del asunto, como cuando...
Geeks de Microsoft, 1978 Geeks de Microsoft, 2008 Treinta años separa la mítica foto de la «nueva versión», en la que aparece Miriam Lubow –que por alguna razón no pudo estar en la foto original– y en la que tristemente no está...
Encuentro digital con Kevin Mitnick en ElMundo.es, breve pero con alguna perla interesante: P: ¿Algún consejo para los adolescentes que se inician en el hacking?R: Que no les pillen…...
El CapsLocker USB parece una gran broma tecnológica que se puede construir con algunos conocimientos de electrónica – así que todavía se puede preparar para el Día de los Inocentes. Es una pequeña llave USB que se puede camuflar en el ordenador...
Hack Story es una iniciativa de la incansable M&M (Mercé Molist) para construir en comunidad, utilizando un wiki, la historia de los hackers. El sitio tiene la portada en inglés pero también hay contenidos ya en castellano. Utiliza el conocido editor de...
Siguiendo los sabios consejos de algunos fans de las consolas me pedí de regalo un DSTT para mi Nintendo DS. Es un cartucho adaptador que, unido a una memoria microSD (hasta 4 GB, pero 2 GB es más que suficiente) sirve para...
La cultura geek, en el diario La Vanguardia: Unos dirán que el geek más célebre es Bill Gates y otros sostendrán que se trata de una contracultura surgida en la universidad (…) Si los hippis querían volver a la naturaleza y los...
Brillante hackeo con JavaScript y CSS, bien explicado en anieto2k: Cómo detectar el sexo de tus visitantes con su historial de navegación. El código original se llama SocialHistory.js y se basa en un hackeo tremendamente ingenioso: utilizando técnicas de programación en JavaScript...
A veces el truco consiste en rayarlo un poco más, como explican en Life Hackery: Removing Scratches from CDs and DVDs. La mayor parte de las veces con agua templada, jabón, trapos de distintas texturas, pasta de dientes (!), pieles de plátano...
La cabeza no solo piensa, también amplifica. Truco de supervivencia: encuentra el coche usando el cráneo como antena.
Mini vMac DS corriendo el Sistema 6; foto de Synaesthesia Mini vMac DS R3 es un emulador de Macintosh que puede ejecutar el Sistema 6 de los viejos Macintosh de Apple en una tarjeta DS Flash en la consola Nintendo DS. Descubrieron...
Al parecer en Japón algunas máquinas expendedoras comprueban la edad de los compradores mediante una cámara digital: se examina la cara del sujeto buscando ciertos signos de «edad», mediante un sistema automático de la compañía Fujitaka. Se trata de discernir si la...
La imagen es bastante autodescriptiva, pero la historia de Security Focus Messing with the RIAA and MPAA tampoco está nada mal: cómo una serie de hackers de la Universidad de Washington consiguieron crear cierta confusión usando BitTorrent y las direcciones de...
Una de esas cosas que siempre viene bien saber, por culturilla, porque nunca sabes cuándo vas a necesitar: Cómo falsificar huellas digitales. Botellas, papel fotografico, pomos de puertas o discos compactos son buenas fuentes para obtener una huella anónima. Luego se puede...
Una de nuestras películas favoritas de todos los tiempos, la mítica Juegos de Guerra, está de aniversario y cumple 25 años estos días. Lo mencionan Slashdot y Barrapunto: WarGames and the Great Hacking Scare of 1983 «Juegos de guerra» cumple 25...
Esto es lo que obtiene si se hackea una Roomba, el robot aspiradora limpiador, para que se parezca a un Pac-Man, añadiéndole unos 450 LEDs para generar la animación del comecocos, los sonidos originales y demás. Es una creación de Ron...
Puzzlemation es un impactante puzzle que está construido con pequeñas pantallas digitales de LEDs que forman un mosaico de 8×8 píxeles. Esas «piezas» son independientes y se programan al comenzar el juego, de modo que pueden mostrar imágenes estáticas o incluso...
Wired’s Geekster Handbook, a Field Guide to the Nerd Underground es una clasificación de las subespecies de geeks, que según Troy Brownfield de Wired pueden dividirse en seis grandes grupos: El Fanboy, cercano al friki El geek musical El jugón / gamer...
Estupenda charla en el TED esta de Johnny Lee, sobre sus hackeos con el controlador de movimiento/infrarrojos de la consola Wii: Creating tech marvels out of a $40 Wii Remote [5 min.] Está en inglés pero se entiende bastante bien. Lo...
Nano nos recordó que en unas semanas se estrena en EE.UU. 21, que es la esperada película sobre el equipo del M.I.T que contaba cartas para ganar al BlackJack. El trailer que se está emitiendo en algunos cines españoles y que también...
Da gusto tener lectores que aprecien grandes detalles del MundoReal™ como estos y encima nos los manden bajo títulos tan sugerentes como La fascinante paradoja del Telepizza – En la oferta del 2×1 te cobran la pizza más cara. Por ejemplo, pidiendo...
Este vídeo es una charla de las siempre recomendables conferencias TED con Gever Tulley, fundador de la Tinkering School. Se titula Cinco cosas que deberíamos dejar hacer a los niños y presenta lo que en su opinión son cinco cosas aparentemente...
El 20 de enero se celebró en CosmoCaixa Barcelona la final española de la First Lego League. Es una competición internacional de robótica para niños (pequeños hackers de 10 a 16 años) en la que este año se inscribieron más de 100.000...
!Hispahack, conocido también como !H, fue un grupo de hackers españoles activo entre los años 1992 y 2002 (…) La razón de la exclamación inicial en su nombre, !Hispahack, era salir los primeros en las listas de canales IRC de Undernet (…)...
100 potrzebies son 226 milímetros1000 ngogns son 11,6 litros1000 blintzes son 36,4 kilogramos El homenaje geek de Google a Donald Knuth, en su calculadora....
El 787 Dreamliner, en pruebas. Foto (FDL): Yasuhiko O. Yasobara Este titular digno de un Gran WTF! resume lo que cuenta Wired en FAA: Boeing’s New 787 May Be Vulnerable to Hacker Attack. Básicamente explica una revelación relativa a la red informática...
El título explica en qué consiste este hackeo con claridad meridiana: Make Something That Can Be Seen on Google Earth, un micro-artículo del Wiki How-to de Wired, que se resumen en: Que tenga al menos 15-20 metros de largo Que tenga cierto...
Pero geeks, geeks. Si te gusta esto, te gustarán… Hack A Day (todo un clásico) Geekologie (futurista total) Hacked Gadgets (cacharritos) Brainy Quote (citas variadas) E-Skeletons (extraño proyecto) Chemical Elements (tabla periódica) Coffee Geek (todo sobre el… café) Board Game Geek (frikis...
The hack of the year publica la curiosa aventura de Dan Egerstad, un hacker sueco de 22 años que trabaja como consultor de seguridad. Consiguó hacerse con cientos de contraseñas de empresas, ONGs, embajadas y otras organizaciones, que luego notificó a los...
Google as a password cracker explica una forma de romper contraseñas en versión niños-de-cuatro-años-podrían-hacerlo. Se aplica cuando se tiene el hash de la contraseña pero no es fácil probar un diccionario completo contra ella, por ejemplo en muchos sistemas de login o...
Este fin de semana largo se está celebrando el evento hacker Hackelarre: Hackmeeting 2007 en Gernika. En la web/wiki hay amplia información sobre las actividades, conferencias, enlaces a los blogs de los participantes y recomendaciones para los medios que quieran cubrir...
Taller de Criptografía recupera en una interesante historia titulada ¿Quién craquea los códigos de Digital+? la época dorada del crackeo de decodificadores de Canal Plus en España de finales de los 90. Como suele suceder con estas historias, por un lado la...
Si lo dice M&M, será verdad: El hack del año – Es impresionante, épico, divertidísimo lo que ha pasado con Media Defender. Una empresa pagada por la industria audiovisual que se dedicaba a meter basura en las redes P2P y van y...
En la carrera entre los estudios empeñados en limitar lo que los usuarios pueden hacer con los discos que compran y los usuarios dispuestos a hacer con esos mismos discos lo que ellos estiman oportuno y no lo que los ejecutivos de...
Cuando hace poco más de dos semanas se publicó la clave que permite decodificar todos o prácticamente todos los títulos publicados hasta le fecha en formato HD-DVD e incluso algunos en formato Blu-Ray estaba claro que sólo era una cuestión de tiempo...
Los detalles son un poco hardcore como para seguirlos a fondo si no estás muy interesado en el tema, pero en los foros de Doom9 se está discutiendo un nuevo crackeo del sistema de protección AACS que haría innecesarias las claves de...
Este número hexadecimal que está circulando hoy por Internet es la última demostración de que los sistemas de protección DRM no tienen futuro. Aunque esa ristra hexadecimal no sirva de mucho sin el software adecuado, resulta ser la «clave secreta» que sirve...
Bordeando la fina línea entre hacker y cracker, una lista de los mejores siete hackers de todos los tiempos, traducida con más detalle en El Concepto es el Concepto como Top 7 Hackers, procedente del original Top 7 Hackers Ever donde hay...
Sanchez-Almeida nos envía un aviso sobre un nueva lamentable actuación de políticos y legisladores, tanto en lo linguístico (la famosa distinción acerca de que un hacker no es un cracker) como en lo demás: Los hackers entran en el Código Penal –...

The History Of Hacking es un gran documental educativo a la par que histórico que en su día emitió Discovery Channel en castellano. Trata sobre la historia de los hackers, empezando por los phreakers o hackers telefónicos como John Draper (Captain...
How To Login From an Internet Café Without Worrying About Keyloggers [PDF, 120 KB] de Cormac Herley y Dinei Florêncio (Microsoft) es un interesante trabajo de un par de páginas que describe una solución de baja tecnología para evitar que un sistema...
The Top Ten Things I Love Most About Woz es una encantadora lista que escribió nuestro admirado Guy Kawasaki sobre nuestro no menos admirado «Woz», Steve Wozniak, legendario hacker y creador de los primeros ordenadores Apple entre otras cosas. Le pedí permiso...
Uno de los mejores hackeos teóricos, llevado a la práctica: Codificación de SMSs mediante llamadas perdidas – Existe una manera de enviar mensajes entre teléfonos moviles totalmente gratuita. Para ello solo necesitamos ocho terminales y SmsCoop (…) El programa utiliza cuatro telefonos...
Ultimo viernes de julio, así que hoy es el System Administrator Appreciation Day o Día de Mostrar Aprecio a tu Administrador de Sistemas –y conviene mucho mostrarle aprecio a tu administrador de sistemas de vez en cuando. Y ¡felicidades! si es tu...
Por Nacho Palou -
28 JUL 2006
95 Theses of Geek Activism: how to defend freedom with tech (95 tesis del activismo geek, o cómo defender la libertad mediante la tecnología) es una llamada al activismo geek/hacker empleando el ya clásico formato de las 95 tesis de Martín Lutero,...
El País publica hoy la segunda parte de la entrevista que le hizo Mercè Molist a Kevin Mitnick, titulada Los mejores consejos de un 'superhacker', en la que Mitnick explica las precauciones básicas que debe tomar el propietario de un ordenador. (Gracias,...

Conway: el genio que hizo que los nerds perdieran horas estudiando patrones simples y complejos.
Microsiervos (Microserfs). Douglas Coupland. 1995. Harper Collins. Publicado en castellano en 1996 por Ediciones B, Grupo Z. ISBN 84-406-6646-2. Traducido por J.G. López Guix y C. Francí. Existe una segunda edición de bolsillo, mejorada y revisada, también en Ediciones B (ambas...
Interesante entrevista a Kevin Mitnick, uno de los hackers más conocidos de las últimas décadas, que acabó pasando una larga temporada en la cárcel en los 90 y tras la experiencia ahora tiene su propia empresa en la que trabaja como consultor...
¡Nueva sorpresa fotográfica! En The Hidden Photos Within Photos se desvela un hecho poco conocido, que es que algunas cámaras digitales añaden una foto «miniatura» (thumbnail) al archivo de las fotos originales como parte de los metadatos EXIF del fichero. A veces...
Durante una auditoría de seguridad informática en una empresa que se dedica a conceder créditos en la que los responsables de ésta se mostraron especialmente preocupados por el factor humano y lo fácilmente que en el pasado sus empleados habían revelado claves...
¡Moooola! No había visto esta versión nunca, y eso que son fan de las creatividades artísticas de Absolut (Vodka). Hasta me compré un libro hace años que recopilaba la historia completa de Absolut, con las imágenes más interesantes. Casi todas aparecieron en...
¡Múltiples historias de terror podrían insertarse aquí en un lunes por la mañana! Eduardo hizo una buena traducción de la excelente anotación: How Not to Lead Geeks: Cómo no tratar a los geeks en el trabajo Subestimar el entrenamiento. No dar reconocimiento....
Mercé publica en su blog y en la revista Arroba una muy buena entrevista a un gran tipo: Alberto Lozano: Hard Hard Hacker. Conocí al legendario Lozano a principios de los 90 a través del mundillo Apple. Luego hicimos cosas juntos durante...
Para variar, un artículo que habla bien de los hackers, titulado precisamente ¿Qué tenemos que agradecer a los hackers? Unas pistas: videojuegos, música generada por ordenador, el ordenador personal, una «cosilla» llamada Internet… (Vía Port 666.) The New Hacker's Dictionary, Third Edition;...
Si llevas escrito «r34lly» en tu camiseta te gustará utilizar Google h4x0r para realizar tus búsquedas. Todo sobre esta versión de Google está explicado aquí: 411 480|_|+ 600613 (lo creas o no ahí dice «All about Google» ;-) En Pipes Network Clog...
Por Nacho Palou -
6 MAR 2006
Todo un clásico: La dieta del hacker: cómo perder peso, y pelo, gracias a una mala alimentación y al estrés, de John Walker. A pasar del título que resulta bastante gracioso, es un libro serio, desde el punto de vista de «ingenería»...
Por si no lo sabías, ¡puedes contar de 0 a 1.023 con dos manos! Geek in extremis: cómo contar en binario usando las manos. (Vía Minid.net.) Actualización (13 de junio de 2018) – La web original ya no existe, pero en la...
Minid explica cómo funciona el asunto del nuevo iPod con vídeo, algo que no me había quedado muy claro tras leer decenas de noticias opr ahí: iPod que soporta video no admitirá piratería -No todo lo que brilla es oro, al menos...
La CNN publicó hace unos días A convicted hacker debunks some myths, una entrevista con Kevin Mitnick, el famoso cracker/hacker (según opiniones), en la que reconoce que él mismo tiene la culpa de todos sus problemas legales y su paso por la...
Siempre me llegan los avisos con poco tiempo, pero bueno, los chicos que hacen cosas raras con la electricidad me avisan de que este próximo jueves 13 de octubre se celebra una nueva edición de Dorkbot en Madrid: ¿Qué es Dorkbot? -...
G0RK4M nos cuenta: Por si alguien se encuentra en la misma situación que yo (intento encontrar un reproductor de DivX freeware que admita subtítulos, pero no lo encuentro), he escrito una pequeña guía sobre Cómo integrar subtítulos en un vídeo para Pocket...
Convocatoria interesante. Añadida al Calendario Geek de octubre: Bajo el lema «Libertad en Construcción Permanente» la sexta edición del Hackmeeting se celebrará este año en el recinto ferial de Mercadal (Menorca) durante los días 21, 22 y 23 de Octubre. El hackmeeting...
Geeks. Hay quien se pregunta si los geeks dominarán el mundo o si ser geek está de moda. Es un artículo titulado Ancient Geek en el Toronto Star, que en Barrapunto está traducido completo al castellano como ¿Está de moda ser geek?...
Ardo en deseos de probar este hackeo, sería uno de lo hackeos definitivos, sólo superable con el hackeo a distancia de semáforos cuando vas en coche (estilo Italian Job). Al parecer los diseñadores de ascensores ponen ciertas «combinaciones de tecla» escondidas en...

Actualización (2023) – El wiki hace años que ya no existe, así que se han quitado los enlaces dado que no funcionan. El Calendario Geek del Wiki ya tiene 56 entradas, la mayoría escritas por lectores del Wiki de Microsiervos. Eso supone...
Todos los últimos viernes de julio, como hoy, se celebra el System Administrator Appreciation Day que en castellano sería algo así como Día de Mostrar Aprecio a tu Administrador de Sistemas. Así que si eres algún tipo de administrador de sistemas, centralitas,...
Desde el programa Google Earth es posible guardar en un archivo diversa información relativa a una localización o vista concreta, de modo que además de poder volver en cualquier momento al mismo punto también es posible (y esto es lo divertido) compartir...
Por Nacho Palou -
22 JUL 2005
Mind Hacks. Tom Stafford, Matt Webb. Editado por O'Reilly. Noviembre 2004. ISBN: 0596007795. Inglés. Web oficial del libro: Mind Hacks. O'Reilly lleva algún tiempo explorando algo más allá de los libros tecnológicos y de referencia que son su especialidad. Se está adentrando...
La BBC cuenta en Key hacker magazine faces closure que Phrack, la mítica revista de y para hackers y phreakers desaparece tras casi veinte años de publicación con su número 63, número será editado en tapa dura y que seguro que se...
Interesante convocatoria para este próximo fin de semana: Jornadas Telemáticas 2005 en el Kaslab - Un año más, los días 8, 9 y 10 de Julio, tendrán lugar en el C.S. Seco las Jornadas Telemáticas del Kaslab (Hacklab de Vallekas). En esta...
¡Qué bueno! En el episodio de CSI que están emitiendo ahora mismo (No More Bets, cuarta temporada) el caso trata de unos tipos que ganan jugando a la ruleta con un ordenador en el zapato, y como no podía ser de otra...
HDLockPicking: Cómo abrir (picking) cerraduras (locks) con piezas de ordenador, más concretamiente con un disco duro (Hard Disk). La apertura de cerraduras y candados es un conocimiento general que no debe faltar en la biblioteca de todo buen hacker, véase por ejemplo...
La Vanguardia publica hoy una entrevista con Richard Stallman, el conocido hacker y defensor del software libre, titulada “Bill Gates está espiándote”. Es tan peculiar como tiene fama de serlo el propio RMS. (Gracias, GgarfielD.) Actualización (15 de junio de 2006): Por...
Algo sobre libros. Mi amigo Carlos, que celebraba ayer su cumpleaños (por cierto que como parte del PDM le regalamos un iPod Mini) me enseñó la versión en castellano editada por Anaya de Google Hacking for Penetration Testers, que tenía buena pinta,...

Puede que este hackeo tenga incluso utilidad para algo, pero cuando menos es curioso. En Abusing Amazon images Nat ha hecho un poco de ingeniería inversa y explica cómo funciona el «código secreto» de las imágenes de Amazon, esas largas cadenas que...
Hace un par de días y nosecuantos posts en una galaxia muy, muy lejana (perdón, es que uno se va poniendo nervioso) hablábamos del fin de la Segunda Guerra Mundial en Europa y de la importancia que la ruptura del código de...
Gizmodo informa sobre un gran hackeo: un emulador de Gameboy para la PSP, con lo cual la mini-consola de juegos de Sony que se pondrá a la venta en septiembre en España ya cuenta con uno de las emulaciones que muchos estábamos...
En todas partes se comenta que hoy se conmemora el 60º aniversario del fin de la II Guerra Mundial en Europa, que fue la guerra que se ganó gracias a la información de los criptoanalistas o «rompecódigos» aliados (denominados por Churchill el...

Cómo hackear máquinas de Pepsi en I-Hacked.com [versión Archive.org]. Es parecido a lo de cómo hackear las máquinas de Coca-Cola de lo que estuvimos hablando hace unas semanas. En mi vida he visto un armatoste como esas máquinas en España, deben ser...
Este hackeo sonaba bueno, tenía incluso un poco de código morse, pero al final les han pillado con todo el equipo: Cien autoescuelas serán cerradas por «chivar» por móvil las respuestas de los exámenes [20 Minutos] - La Guardia Civil ha puesto...

La anotación del otro día sobre cómo hackear máquinas de refrescos de Coca-Cola ha tenido tantos comentarios que la página se ha vuelto un poco grande e «impracticable», así que vamos a continuarlos en este nuevo hilo. La foto de la máquina...
The Eudaemonic Pie: The bizarre true story of how a band of physicists and computer wizards took on Las Vegas. Thomas A.Bass. Houghton Mifflin. 1985. ISBN: 0395353351. Inglés. 330 páginas. Web sobre el libro, por Thomas A. Bass Este libro también...
The New Hacker's Dictionary, Third Edition. Eric. S.Raymond. The MIT Press. 1996 (1993). ISBN: 0262680920. Inglés. 547 páginas. Weblog de Eric S. Raymond. Esta tercera edición del Diccionario del Hacker es sin duda referencia obligada para todos los hackers como para...
Un repaso histórico sobre los hackers, desde el M.I.T. de los 1950 hasta los microordenadores y los videojuegos, con ética hacker incluida, por si faltaba épica.
ALT1040 puso hace tiempo un enlace a Cómo obtener Coca-Cola gratis en lo que es una especie de hacking de bajo nivel, pero hacking entretenido al fin y al cabo. En el artículo original (en inglés), titulado Hacking Coke Machines se explica...
El otro día nos preguntábamos si el dicho «ser un hacha» podría tener algo que ver con los hackers, dado que una de las definiciones de «hacker» era originalmente, al menos en inglés, «alguien que fabrica muebles con un hacha». Naturalmente, para...
En la anotación Return of the Mac de Slashdot hay una interesante discusión acerca de la importancia que puede tener el hecho de que cada vez más hackers se estén pasando a Mac OS X, basada en lo que cuentan enReturn of...

A modo de recordatorio histórico, algo que escribí en 1996 y que ha estado en la Red desde entonces. En 2003 lo actualicé mínimamente dado que incluso las definiciones originales habían cambiado en los últimos años. De vez en cuando se reedita...
Vía Fernand0 una entrevista de Xavi y Mercé ni más ni menos que a Bruce Schenier, leyenda viva de la seguridad informática, publicada en El País (en su blog hay un PDF completo). Bruce Schneier, gurú de seguridad (€) (...) fundador de...
Es una bonita historia para Navidad: The Graphic Calculator Story. Narra las aventuras de Ron Avitzur durante la creación de la Calculadora Gráfica, originalmente NuCalc, que formó parte de las aplicaciones incluidas en más de 20 millones de Macintosh PowerPC, en el...
Alexburke lo cuenta en How To Cost Microsoft Money: cómo consiguió 150 copias físicas de CD-ROMs del SP2 de Windows XP en modalidad “gratis total” con solo pulsar el botón ATRáS y RECARGAR 150 veces en su navegador. ¡Y con fotos! (Visto...

Este artículo, igual que el del verdadero origen de Internet, fue publicado originalmente en el periódico El Ideal Gallego; más tarde se publicó como especial en la web de iWorld, la revista de Internet de IDG -donde ya no está disponible- y...
Una lista completa de todos los MacGyverismos, expresión para definir todos aquellos "hackeos ingeniosos de baja tecnología" que llevaba a cabo MacGyver utilizando lo que encontraba más a mano. A destacar: Atravesar un puesto de control colgado debajo de un coche Usar...
El tribunal de apelaciones de Oslo ha confirmado hoy la sentencia que absolvía a Jon Lech Johansen, más conocido cómo DVD Jon, de los cargos de violación del copyright y de fomento de la piratería que había presentado contra él la unidad...
How To Open Locks With Improvised Tools. Hans Conkel (2001). Se trata de una guía simple y práctica de cómo abrir cerraduras: puertas, candados, coches, cajoneras y cualquier otro dispositivo «cerrado con llave» de la forma menos destructiva posible. Si alguna...
La mejor definición del término geek, palabra que se usa tanto en inglés como en castellano (aunque en nuestro idioma apenas es conocida fuera de los propios círculos geeks) es la de Jon Katz, autor de Geeks: How Two Lost Boys Rode...
Martes 25, 8.30pm. El altamente tecnológico Diario del Navengante del no menos prestigioso periódico El Mundo publicaba ayer esta noticia, también disponible buscando por «casa blanca»: Piratas informáticos chinos 'hackean' la página web de la Casa Blanca con mensajes ofensivos – INSULTAN...
The Art of Deception: Controlling the Human Element of Security. Kevin D. Mitnick, William L. Simon. Octubre 2002. Sin duda uno de los más famosos hackers (o crackers, según se mire) de las últimas décadas, Kevin Mitnick, ha decidido abandonar el...
Bringing Down the House: The Inside Story of Six MIT Students Who Took Vegas for Millions. Ben Mezrich. 2002. Este esperado libro fue adelantado en un número reciente de la revista Wired bajo el atractivo título Hacking Las Vegas. El título de...
The Victorian Internet: The Remarkable Story of the Telegraph and the Nineteenth Century's On-Line Pioneers. Tom Standage. 1999. Resulta increíble encontrar tantas similitudes entre la invención del telégrafo y la Internet actual. El libro, que resulta increíblemente ameno y entretenido, no...
Estos nuevos Robin Hoods («robo a los ricos, me lo quedo yo») recuerdan al grupo de eudaemons descrito en The Eudaemonic Pie y aunque se les parecen mucho son del MIT. En Wired publican este mes Hacking Las Vegas, donde se describe...
Todo un clásico: el documento para identificar a tu administrador de sistemas entre la variada fauna informática que puebla las empresas: Know your System Administrator....
Cyberpunk: Outlaws and Hackers on the Computer Frontier. Katie Hafner, John Markoff. Touchtone. 1991. ISBN: 0684818620. Inglés. 370 páginas. Según los autores, los cyberpunks son los forajidos y hackers de la frontera informática - la definición original se refiere a un género...
Anarchy Online: Net Crime, Net Sex. Charles Platt. HarperCollins. 1997. ISBN: 0061009903. Inglés. 366 páginas. Dividido en dos partes claramente diferenciadas, Anarchy Online es prácticamente dos libros (incluso la mitad del volumen está encuadernada en un sentido y la otra mitad boca...
Masters of Deception: The Gang That Ruled Cyberspace. Michelle Slatalla, Joshua Quittner. HarperCollins. 1995. ISBN: 0060926945. Inglés. 226 páginas. En este libro sobre los crackers (piratas informáticos destructivos) y los phreakers (hackers telefónicos) se describen las andanzas por las redes de bandas...
The Hacker Crackdown: Law and Disorder on the Electronic Frontier. Bruce Sterling. Bantam Books. 1992. ISBN: 055356370X. Inglés. 316 páginas. Disponible como libro electrónico gratuito en la Web: The Hacker Crackdown (inglés) y The Hacker Crackdown (La Caza de Hackers), Ley y...
Underground: Tales of Hacking, Madness and Obsession on the Electronic Frontier. Suelette Dreyfus. Mandarin. 1997. ISBN: 1863305955. Inglés. 476 páginas. Esta novela, basada en hechos reales, cuenta las andanzas de un grupo de hackers australianos y sus aventuras en las redes. Al...
Secrets of a Super Hacker. The Nightmare. Loompanics Unlimited. 1994. ISBN: 1559501065. Inglés. 204 páginas. Este libro es, sencillamente, un manual de hackers bastante... infantil. Escrito por un hacker anónimo, explica todos los métodos clásicos de los hackers, con un texto muy...





