Su lanzamiento está previsto para el próximo 30 de agosto a bordo de un Falcon Heavy.

A lo largo de su carrera estableció numerosos récords

Es un componente fundamental de los planes del país para enviar una misión tripulada a la Luna antes de que termine esta década.

Sólo han pasado unos nueve meses desde que la agencia adjudicara el contrato para llevarla a cabo, lo que es una velocidad inusitada.

El cielo nocturno avanza con más y más chatarra hacia un final soprendentemente «brillante» que no es tal como suena.
El jurado destaca que «su esfuerzo de superación personal ha contribuido a extender las fronteras de la humanidad».

Su capacidad de carga a órbita baja terrestre aumenta en dos toneladas para alcanzar un total de 22.
Trae de vuelta resultados de experimentos y materiales que hay que revisar o que ya no son necesarios a bordo de la EEI.

No sabemos aún la fecha del siguiente intento.
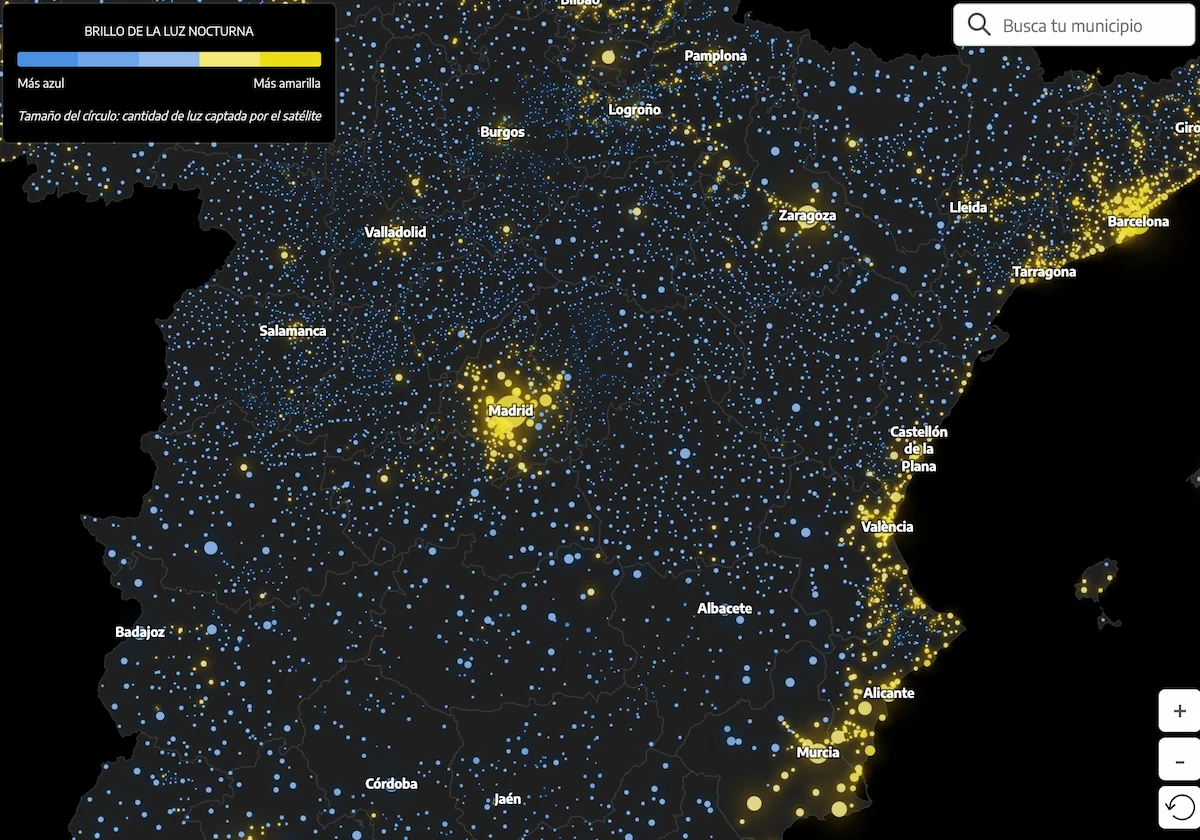
Entre farolas, LED azules y urbanismo con vocación de estadio, quedan pocos oasis realmente oscuros

Las cifras que se manejan son descabelladas y como para asustar al más pintado.

Lo que no está nada claro es que esa misión vaya a poder ser lanzada a finales de 2027 como pretende la NASA.

Es un duro golpe para Blue Origin y también para los planes de la NASA de volver a la Luna.
Esto permitirá una breve visita a la estación espacial china por parte de un astronauta paquistaní.

Para ser un cohete con grandes cambios respecto a las versiones anteriores las cosas han ido razonablemente bien.
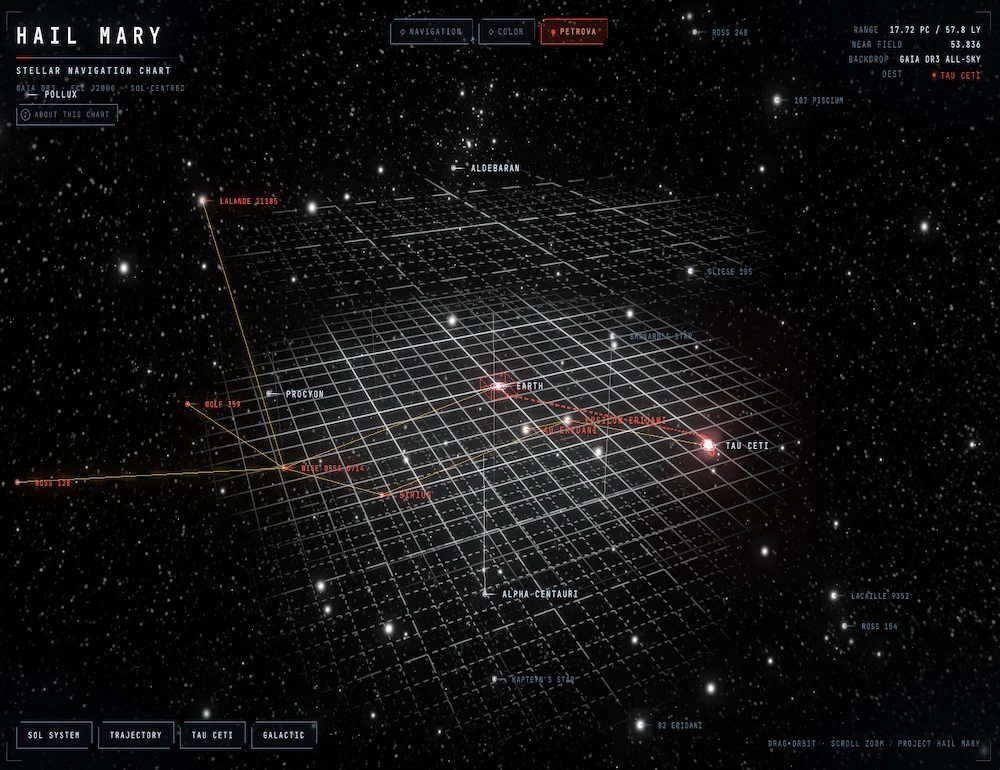
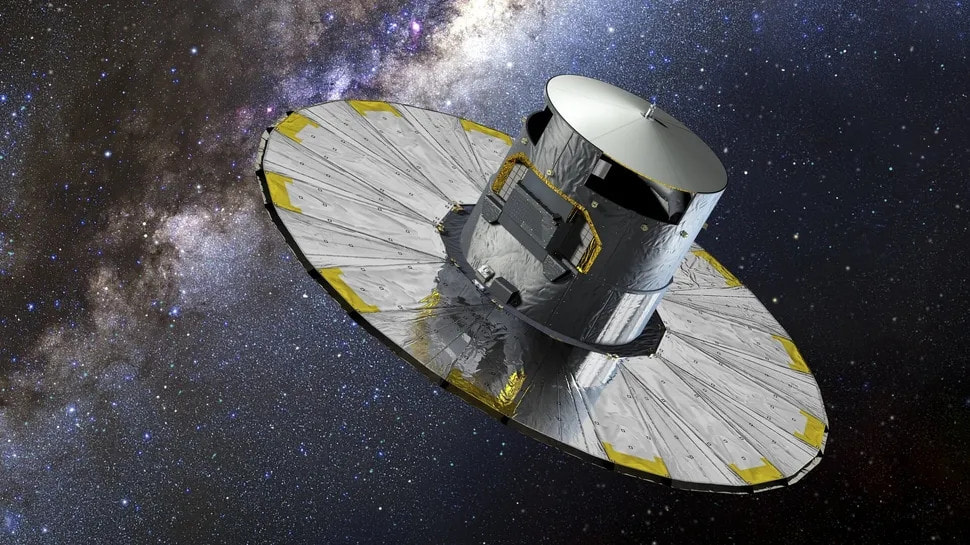
Un viaje intergaláctico gracias a los datos de GAIA DR3. Ojalá hubiera GPS y wifi en el espacio.
No hay fechas para ella, claro.

Es el primero desde octubre de 2025.

Tardará un mes en alcanzar su órbita de trabajo y está previsto que empiece a recoger datos en julio.

Es una reflexión que era necesaria desde hace tiempo, y más desde que Donald Trump ha llegado de vuelta a la Casa Blanca.

Lleva a bordo casi 3.000 de consumibles y materiales.
Lleva en camino desde octubre de 2023 y no llegará a su destino hasta el verano de 2029.
Dan para echar un buen rato alucinando con ellas.

La duración prevista de su misión es de unos seis meses.

Será sustituido en apenas unos días por otro repleto de nuevos suministros.

Puedes jugarlo en Windows en Steam, PlayStation 5 y Xbox Serie X/S.

Será la startup frances Maisapace la que ocupe esa plataforma de lanzamiento.

Lleva más de una década en desarrollo y aún le queda demostrar su valía con una misión con carga útil real.

Tiene tres meses para lanzar otros 1.600 más.

La carga útil ha sido el tercer satélite de telecomunicaciones de la serie Viasat 3
Es la segunda en utilizar la recién reparada plataforma 31/6 del Cosmódromo de Baikonur.

Baikonur va retomando la normalidad tras la reparación de la plataforma 31/6.

Será sustituida en unos días por la MS-34.
Habrá qué ver qué ha sucedido con la segunda etapa para que la carga útil no haya quedado en la órbita prevista.

Esta sonda y su gemela son las que más lejos han llegado de la Tierra.

Es el cuarto cohete que está previsto que ponga en camino la misión; a ver si a la cuarta va la vencida.

Estará en el espacio hasta el mes de noviembre.

Han sido nueve días, una hora, 31 minutos y 35 segundos entre el despegue y el amerizaje.

La NASA cree haber dado con la solución que evitará que el escudo térmico resulte tan dañado como en la misión anterior del programa.
La misión debe terminar con un amerizaje frente a la costa de California en la madrugada del sábado 11,

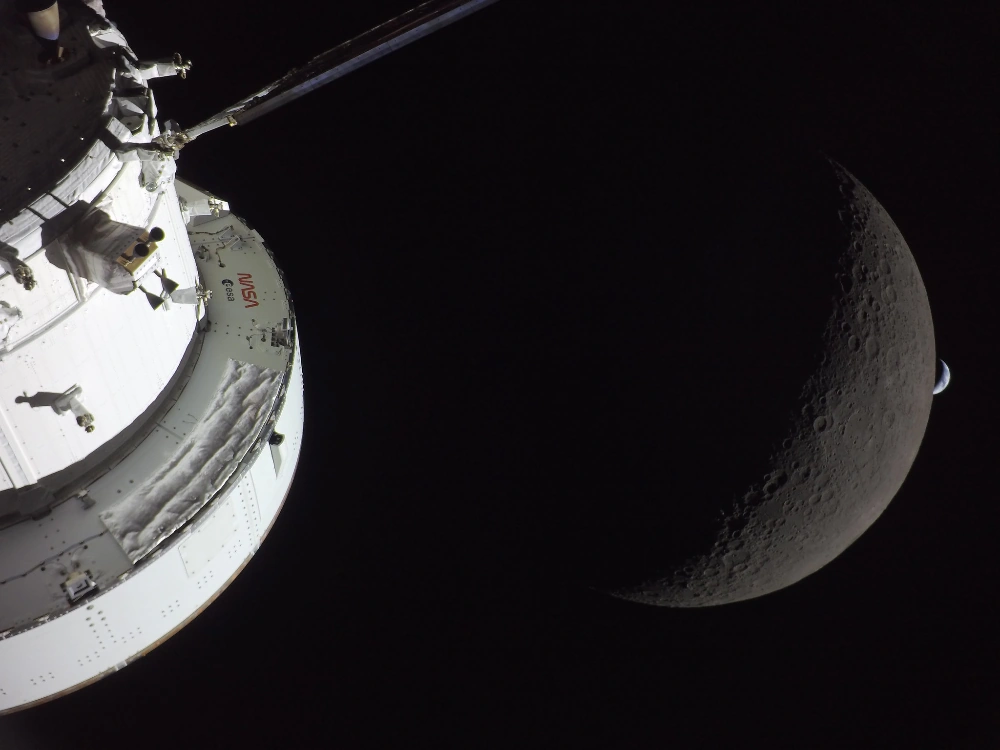
Están empezando a llegar fotos del sobrevuelo de la Luna por parte de la misión y son todo lo espectaculares que esperábamos.

Habrá que espras unas horas e incluso días para que el ancho de banda disponible permita recibir imágenes en alta resolución.

Les pasa la antorcha simbólicamente para que sigan allanando el camino para futuras misiones.

Serán algo menos de cinco horas de actividad frenética a bordo de la cápsula Orión Integrity.

Tampoco verán un eclipse de Sol, aunque lo hayas oído por ahí.

Hay alternativas a su uso; buena es la NASA preparándose para imprevistos.

Una foto tomada mientras partían hacia la Luna recuerda inevitablemente a la tomada por la tripulación del Apolo 17 en las mismas circunstancias.

Con el lanzamiento de hoy tiene en órbita 241 de los 1.615 que en principio tiene que haber lanzado para el 31 de julio de este año.

Habrá que ver cómo se toma esto el Congreso y si consigue evitarlo igual que para el presupuesto de 2026.

La primera etapa es –o será– reutilizable al estilo del Falcon 9.

La sobrevolarán el próximo lunes.

El primero nunca ha sido probado antes en condiciones reales; el segundo resultó seriamente dañado en la anterior misión.

Serán diez días entre ida y vuelta.

Desde diciembre de 1972 ninguna persona ha ido más allá de la órbita baja terrestre.

Quedan poco más de 24 horas para llegar al momento previsto.

Si todo va bien despegarán el jueves 2 a las 00:24, hora peninsular española (UTC +2).

Puede volar con hasta cuatro propulsores laterales o con ninguno, aunque la configuración estándar es con dos.

Este episodio fue el que llevó a la NASA a decidir que él y sus compañeros de la tripulación Crew 11 volvieran a casa antes de lo previsto.

Lo más preocupante es la meteorología, que aún así se estima favorable en un 80 %.

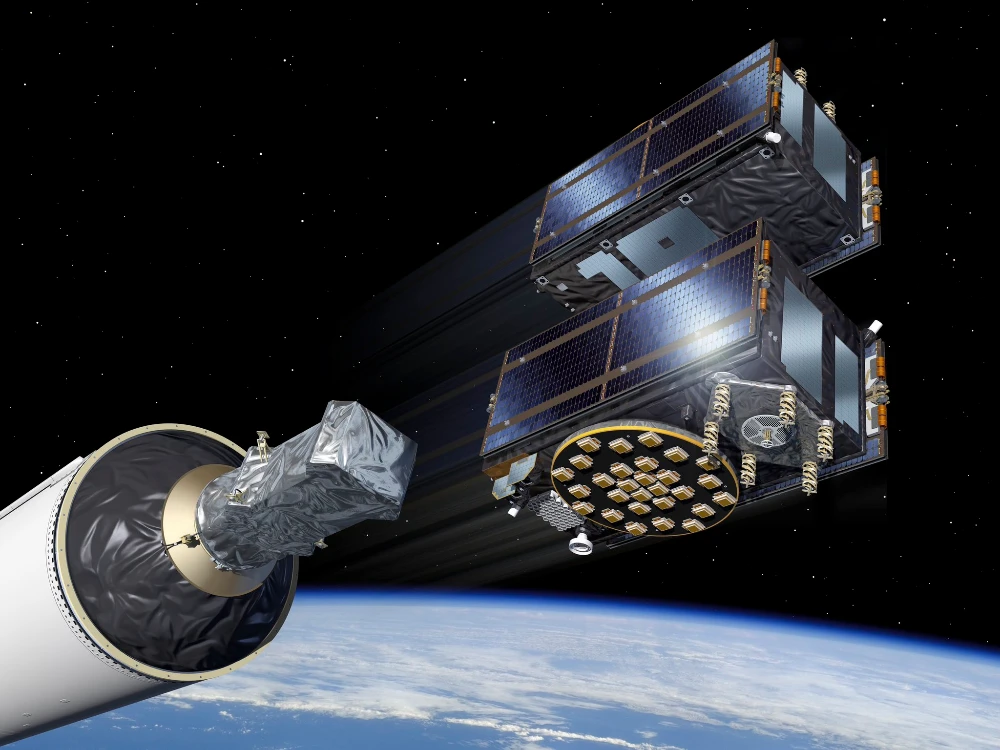
La idea es mejorar la disponibilidad y precisión de los servicios que ofrecen Galileo y EGNOS.

Hasta ahora estaban en el Centro espacial Johnson en Texas, que es su base.
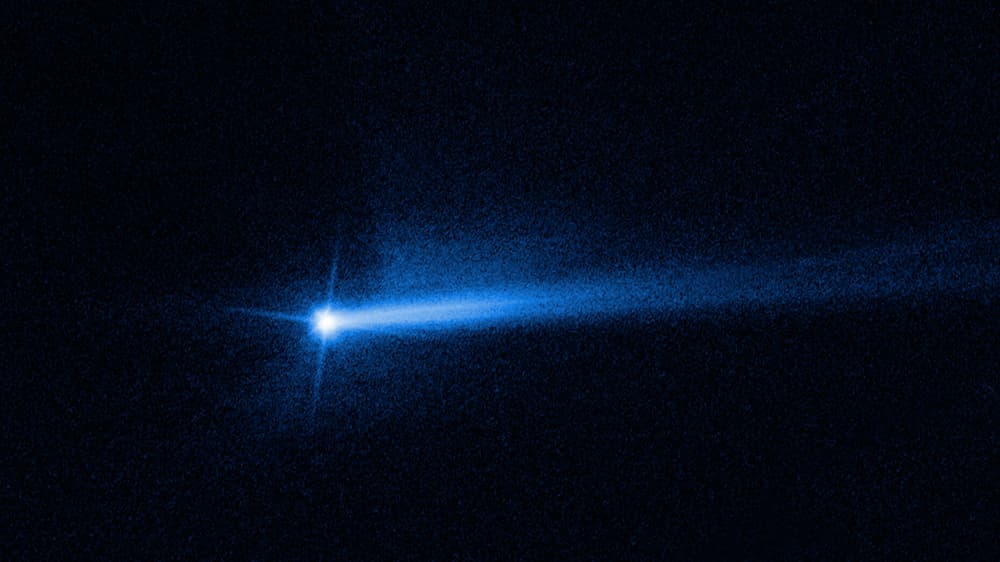
Este resultado amplía las capacidades de defensa planetaria de la humanidad, que falta nos hace.

Puede convertirse en la primera empresa privada europea en llegar a orbita.

Va a ser prácticamente imposible que se cumpla nada de lo previsto en los plazos previstos.

Su lanzamiento marcó la vuelta al servicio de la única plataforma desde la que Rusia puede lanzar naves a la EEI.

La Progress MS-33 marca la vuelta al servicio de la plataforma 31/6 del Cosmódromo de Baikonur.

Hay varios días en los que puede despegar la misión si no lo consiguen a la primera.
Al principio estaba prevista la instalación de seis de estos paneles, pero al final serán ocho.

Un traje excesivamente hinchado provocó todo tipo de problemas, aunque esto no se supo hasta muchos años después.

La única plataforma que se puede usar para lanzarlas lleva fuera de servicio desde noviembre de 2025, pero se supone que ya está reparada.

Lamentablemente murió antes de ver ningún lanzamiento orbital.

Se desintegró en una reentrada controlada en la atmósfera.

La ventana de lanzamiento del mes que viene incluye hasta seis oportunidades distintas.
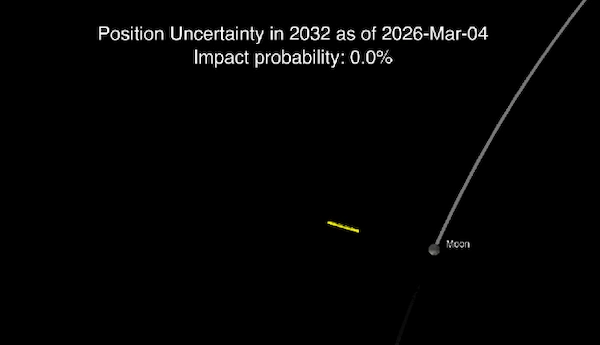
El susto del «asteroide, ven ya» se queda en simple amago: de un 4,3% de probabilidades de choque lunar con la Luna a nada de nada.

La escogida es una Centauro V modificada que apenas requiere modificaciones.

Estará tres meses demostrando el funcionamiento de distintos experimentos y dispositivos.

El problema estaba con el sistema de alimentación de helio de la segunda etapa.

Le permitirá aumentar su capacidad de producción y lanzamiento.

El próximo 22 de marzo será el momento de comprobar que todo está bien… O no.

Se trata de un documento que recoge acciones ya en curso.

La idea es, sin embargo, acelerar la cadencia de lanzamientos del programa.

Es una operación que hay que hacer periódicamente para evitar que se precipite en la atmósfera.

Seguimos sin saber qué le pasó pero al menos ya tenemos algo más de información.

El problema está en el sistema de purga de hidrógeno y oxígeno mediante helio de la segunda etapa.

Todo indica que pasará mucho tiempo antes de que volvamos a ver una misión tripulada de esa cápsula.

A falta del análisis definitivo de los datos la agencia podría programar el lanzamiento para el 7 de marzo.

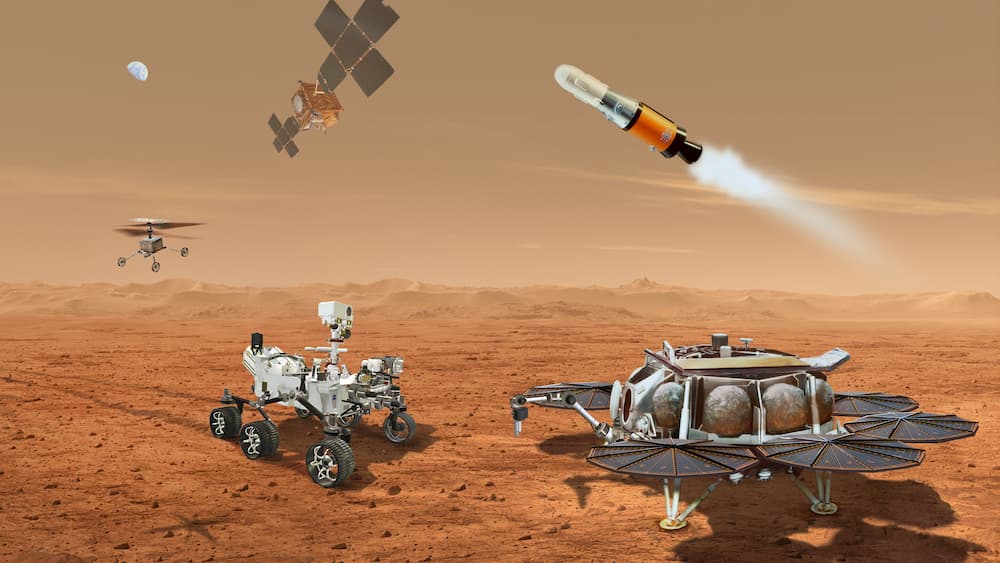
Tal y como están las cosas es prácticamente seguro que las muestras que ha tomado no llegarán nunca a la Tierra.

Será una importante demostración de la capacidad española de acceder al espacio sin depender de nadie.

Con la fecha de nacimiento, una web suma los giros del planeta, sus órbitas y el desplazamiento de la galaxia.

La misión, que está previsto que despegue el próximo 22 de marzo, será seguida con enorme interés.

Si todo va según lo previsto será la estancia más larga en el espacio de un astronauta de la agencia europea hasta la fecha.

Estaba a pocos meses de lanzar por primera vez su cohete Prime.

Están teniendo los mismos problemas que con el cohete que lanzó la anterior misión del programa.

Es la primera del grupo de astronautas de carrera de la ESA de la promoción de 2022 en volar al espacio.

Es el primero comercial del cohete y de los dieciocho que tiene contratados la empresa estadounidense.

A pesar de todo la carga útil fue colocada en la órbita prevista.

Hay programado el lanzamiento de una cápsula Progress desde la plataforma reparada para el 22 de marzo.

Es un importante paso más de cara a llegar a nuestro satélite para 2030, que es el objetivo fijado.

Debe estar sintiendo tanto la presión de la NASA como el aliento de Blue Origin en la nuca.

En principio será un retraso de a lo sumo un par de días.

En ella va Sophie Adenot, que será la primera astronauta de la promoción de la Agencia Espacial Europea de 2022 en ir al espacio.

Los objetivos son tan misteriosos como en cualquiera de las tres anteriores.
La idea es dejarles comunicarse de forma más espontánea y acelerar el proceso de adopción de dispositivos por parte de la agencia.

La astronauta francesa de la Agencia Espacial Europea Sophie Adenot forma parte de ella.

La idea es montar una plataforma de computación para inteligencia artificial en órbita formada por un millón de satélites.

El no poder terminar la primera prueba de carga de propelentes del cohete ha obligado a tomar esta decisión.

Los responsables de la NASA decidieron ignorar información que apuntaba a daños en el ala del vehículo que podían comprometer su integridad estructural.

No es descabellado pensar que esta decisión pueda permitir a la empresa adelantar a SpaceX.

Las bajas temperaturas reinantes en Florida obligan a tomar esta decisión.

Sigue estando previsto que el cohete haga su vuelo inaugural en 2026 desde el Puerto espacial europeo de Kourou.

La agencia dispone de otros aviones que se pueden encargar de la tarea aunque no tengan un techo de vuelo tan alto.

Una cultura tóxica que tendía a silenciar las voces disonantes tuvo mucho que ver con que se produjera algo que era perfectamente evitable.

Los datos que obtenga se incorporarán a los modelos meteorológicos con los que se elaboran las predicciones y también los avisos de riesgos inmediatos.

La agencia lo utiliza para obtener imágenes del lanzamiento y la reentrada de sus misiones más relevantes.

Numerosos errores de diseño, un proceso de ensamblado menos cuidadoso de lo debido y un descontrol generalizado fueron factores decisivos en la muerte de los tres astronautas.
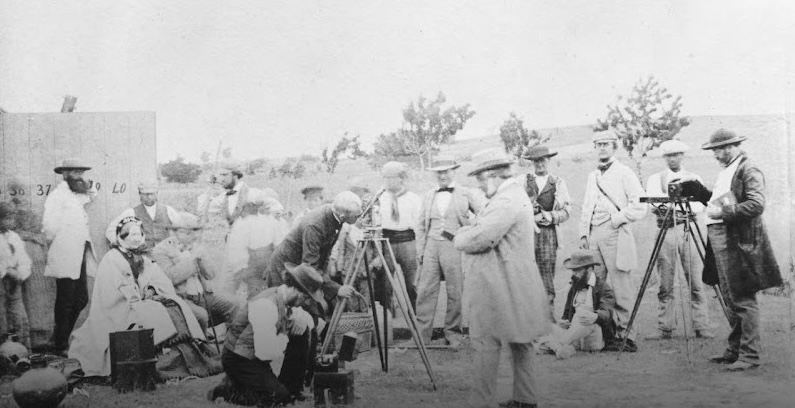
Entre mapas viejos y geodesia fina, ya se sabe definitivamente dónde se montó el observatorio del eclipse de 1860.

El Congreso los ha rechazado de plano tras varios meses de debate.

Es la segunda persona de nacionalidad española en volar con la empresa de Jeff Bezos.

Circunvalarán nuestro satélite, sin llegar a entrar en órbita.

Los cohetes para los siguientes cinco lanzamientos ya están en producción.

Por ahora no hay información acerca de sus planes de futuro.

Su tripulación original volvió a casa en otra cápsula hace ya unas semanas para no correr riesgos.

La causa ha sido el impacto contra algún tipo de partícula de pocos milímetros y gramos que lo ha dejado en un estado irrecuperable.

Vienen ahora unas semanas de pruebas para comprobar que todo funciona correctamente antes de poder seguir adelante.

Es una gran victoria y un ejemplo lamentablemente poco usual entre demócratas y republicanos.
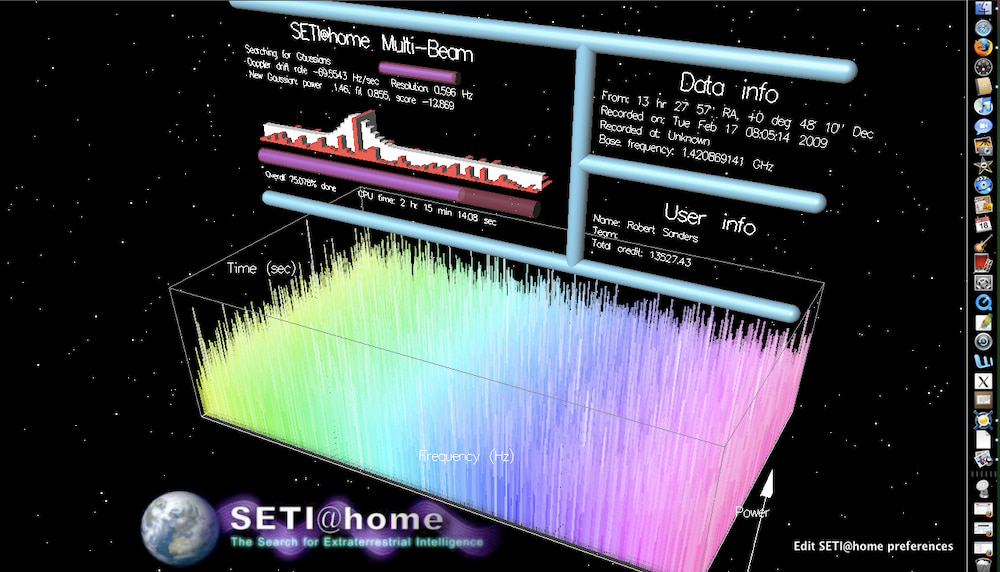
El proyecto dejó ciencia ciudadana a escala planetaria y muchas lecciones aprendidas. El resultado: 100 señales que aún se hacen las «interesantes».

Seguimos sin saber quién es la persona afectada ni qué le pasa.

Pero primero el cohete tiene que la pondrá de camino tiene que pasar todavía sus ultimas pruebas.
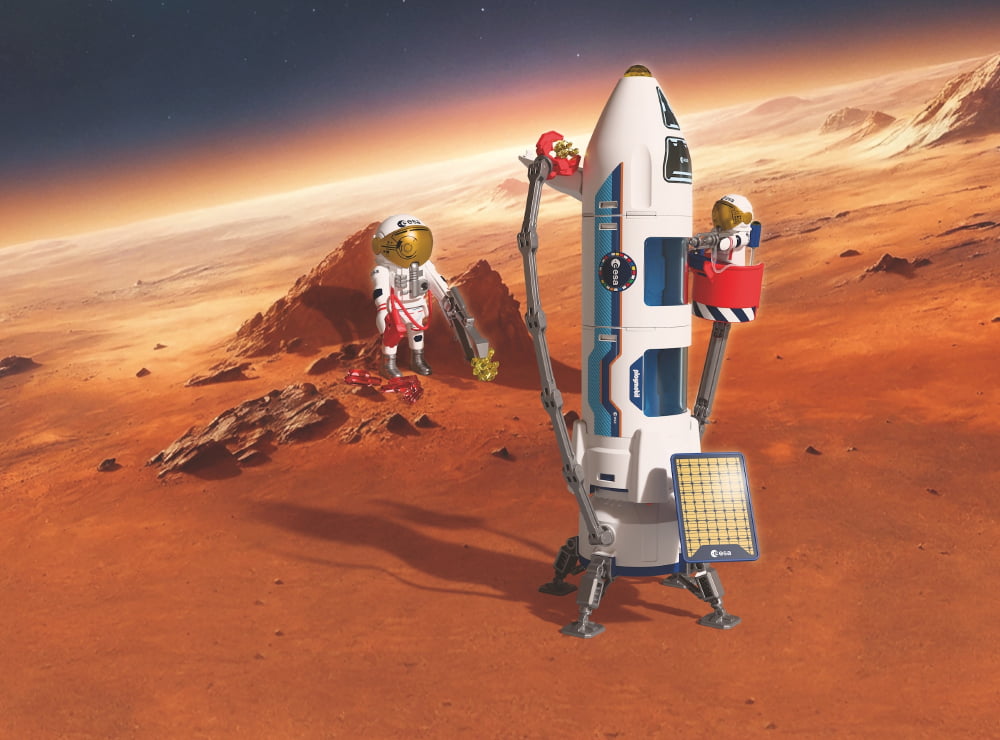
Tres nuevos conjuntos se unen a la línea de colaboraciones entre ambas.

Es la primera vez en la historia de la agencia o de la Estación Espacial Internacional en la que sucede algo así.
China tiene ahora todas las papeletas para convertirse en el primer país que lleve a cabo una misión de ese tipo.

El segmento estadounidense de la Estación Espacial Internacional quedará a cargo de Chris Williams en caso de producirse esta vuelta antes de tiempo.

Habrá que esperar a la próxima primavera para que vuelvan a volar.

No ha sido un proceso fácil pero por fin la agencia tiene alguien al mando de forma permanente.

Deja en una situación delicada al programa espacial del país ya que es su principal lanzador.

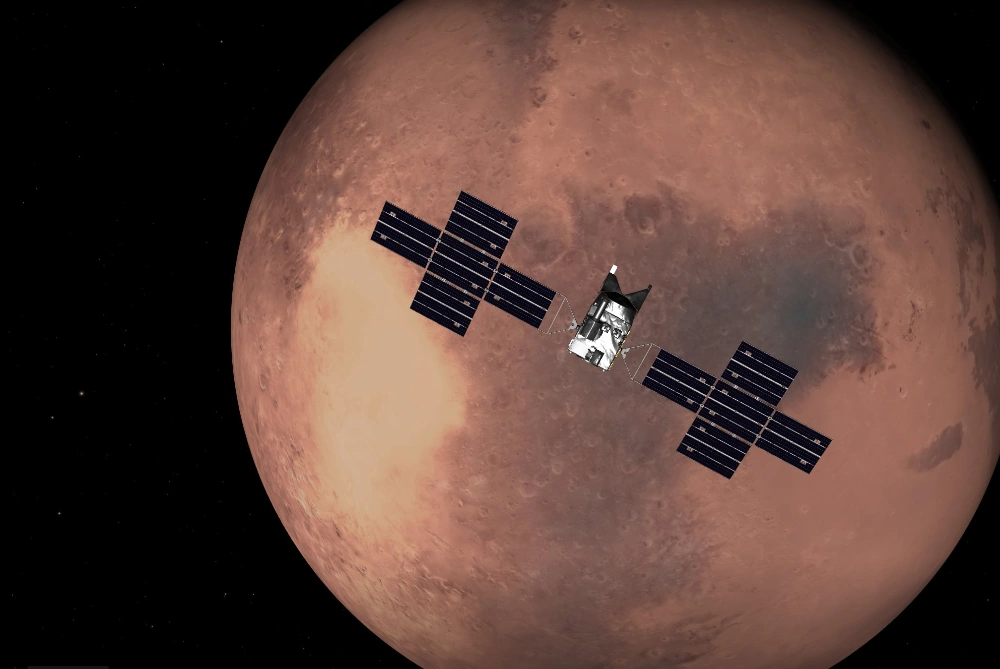
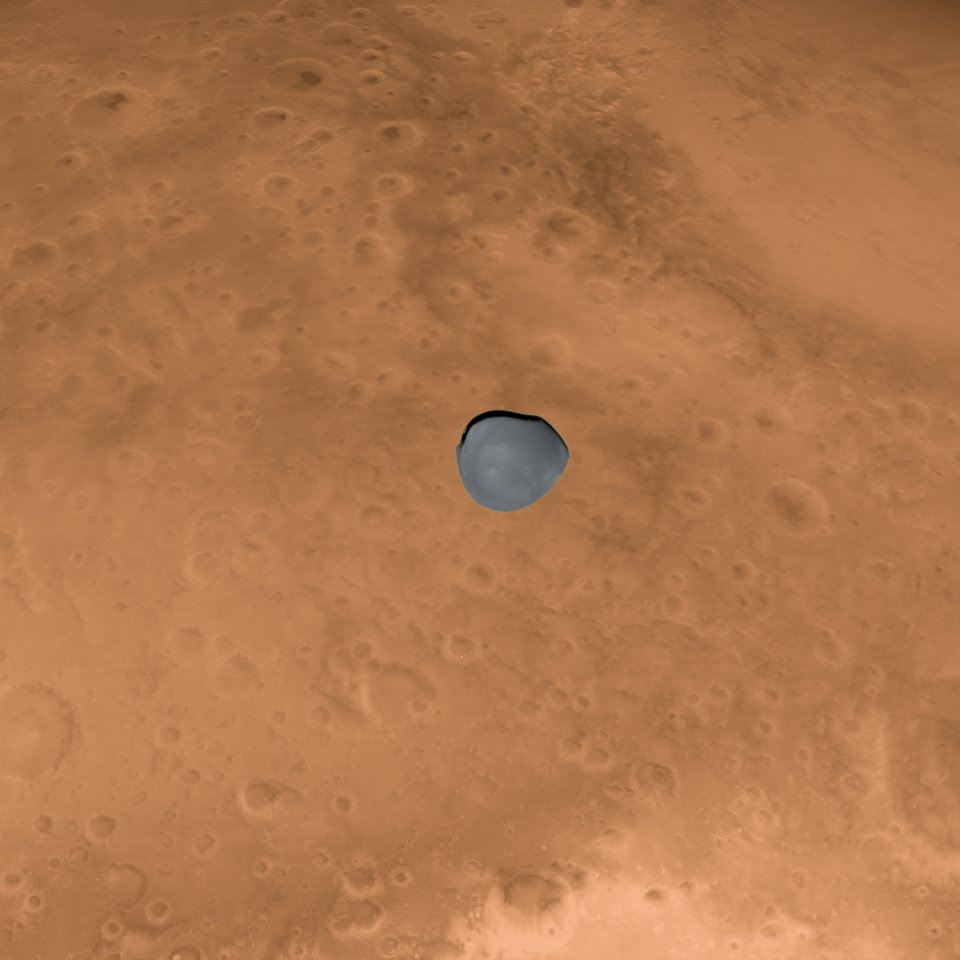
En Marte, el tiempo vuela. Aunque no tanto como para preocuparse... de momento.

Ha sido la más larga hasta la fecha de una de estas cápsulas.
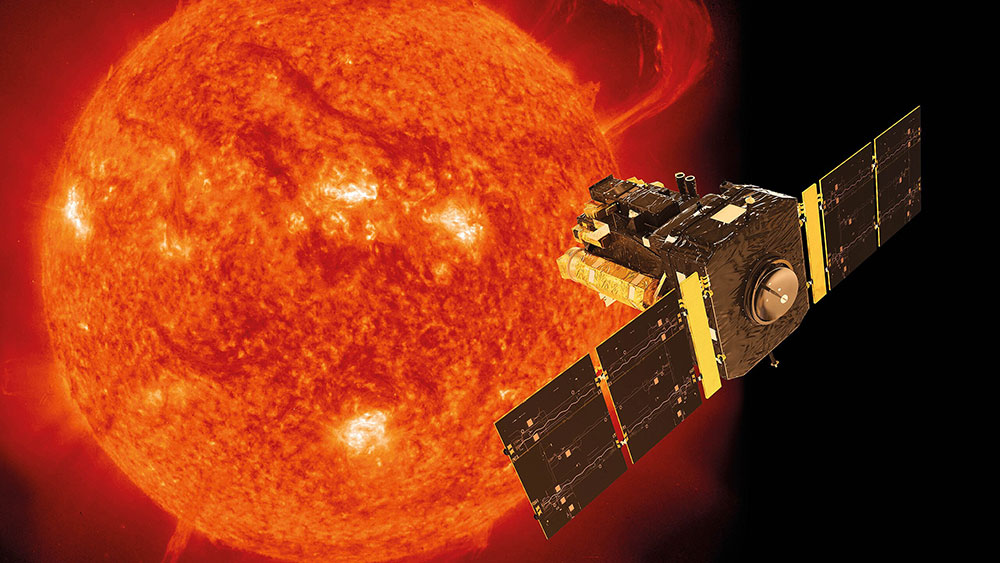
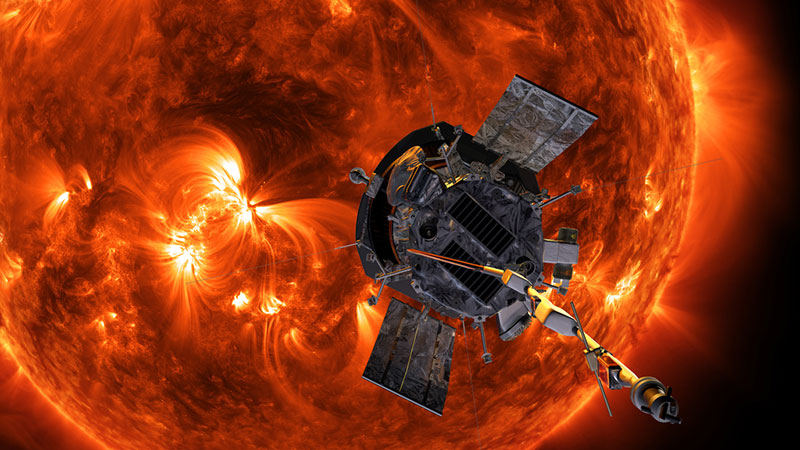
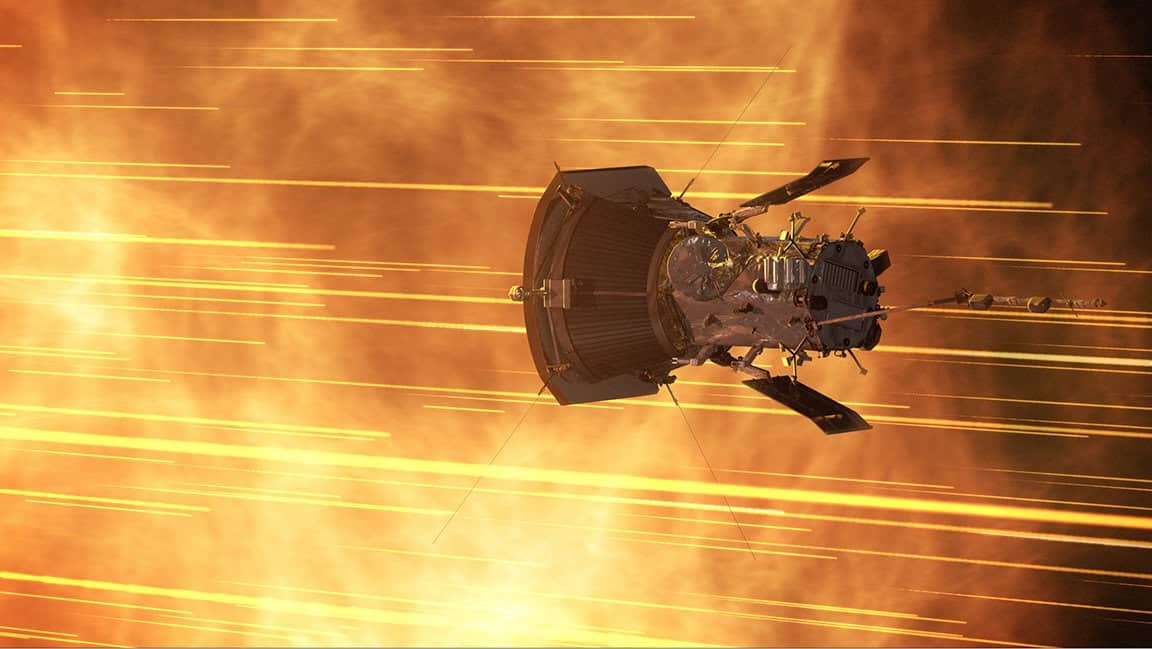
Es una misión conjunta de la ESA y la NASA que estudia el Sol.

El problema de los n cuerpos es más enrevesado que un cubo de Rubik en una montaña rusa.

La avería tiene toda la pinta de ir para largo.

Estarán a bordo unos seis meses antes de que llegue su relevo.

Es prácticamente la cantidad completa que la agencia pedía de antemano.
En abril debería ser declarado oficialmente en servicio.

El complicado –más de lo habitual– panorama geopolítico actual lo hace el más relevante en muchos años.
Es un nuevo fracaso en el desarrollo de esta nave, que acumula retrasos y problemas más allá de lo que cualquiera pudiera haber pensado cuando empezó su desarrolló allá por 2010.

La avería de la Shenzhou 20 por el impacto de basura espacial hizo necesaria esta misión.

Esto supondrá más retrasos en el programa, que se supone que hace como dos años que tenía que haber logrado poner el cohete en órbita.

Se trata de una unidad de calificación y no está destinado a volar, pero antes de que termine el año quiere tener lista una segunda unidad de pruebas y para el primer trimestre de 2026 la primera unidad de vuelo.

La apertura del gobierno federal ha permitido levantar las restricciones en vigor desde el 7 de noviembre.

Por ahora no hay ninguna nave tripulada europea en la que probarlo pero nunca está de más ir preparándose.

Se unirá en breve a su gemelo, el 6A, para dar continuidad a una toma de datos que se está haciendo de forma ininterrumpida desde 1993.

Hay que lanzar lo antes posible una cápsula para los tres astronautas que quedan a bordo de la estación espacial china.

Se convierte en la segunda empresa del mundo en lograr tal cosa.

La Agencia Espacial Tripulada de China está estudiando opciones para solucionar la situación.

Estas limitaciones podrían durar pocos días si el grupo de senadores demócratas que han decidido apoyar los presupuestos de Trump no cambian de opinión.

El proceso no puede arrancar mientras el gobierno de los Estados Unidos esté cerrado por falta de presupuestos.

Es el cuarto de esta familia que es lanzado.

Enviamos de todo al espacio: placas, canciones, mensajes… Si hay E.Ts, esperemos que sean fans de los Beatles y no de las invasiones galácticas.

Está por ver cuánto tiempo más le queda por la edad de sus módulos y por la voluntad de la NASA de favorecer las estaciones espaciales comerciales.

Permanecerán a bordo aproximadamente seis meses.

Se une a las Cygnus, Dragon y Progress en esta importantísima tarea.
Se unirá a su gemelo, lanzado a principios de este año, para dar servicios de telecomunicaciones seguras.

Pretende reabrir el concurso para la adjudicación del contracto para la construcción del aterrizador de la misión Artemisa III, ahora en poder de SpaceX.

Siguen apuntando a un primer lanzamiento desde el Puerto espacial de Kourou en 2026.

Si funciona como se espera podría servir como base para una producción industrial en el futuro.

Será el último lanzamiento de este año y el último de la versión dos del cohete.

Es algo que está previsto y que seguirá pasando en el futuro, por lo que siempre tendrá que estar reponiéndolos.

La gravedad no es tan rápida como pensaba Newton. La Tierra necesita 8 minutos tras la desaparición del Sol para darse cuenta de que ya no está ahí.

Una de ellas volaba por segunda vez.

Durante el último año la empresa ha estada centrada en el desarrollo del Miura 5, su próximo cohete.

Se avecinan disputas legales y políticas sobre el futuro de esta parte de la historia de la era espacial.

Es también el que lleva más paseos espaciales.

Con esta ya son cuatro las dedicadas al seguimiento de las sondas más lejanas.

Vamos muy tarde pero parece que por fin empezamos a movernos.

Después de casi veinte años en desarrollo no deja de haber retrasos en su entrada en servicio.

Tiene que lanzar más de 3.000 satélites más de aquí a finales de julio de 2026.

Su destino es el punto de Lagrange L1 del sistema Sol-Tierra.

Comienzan ahora una formación de dos años que les permitirá unirse al cuerpo de astronautas de la agencia.

Aporta mayor capacidad en cuanto a masa y volumen de carga para cada lanzamiento.

La vida útil del nuevo traje es de seis o siete años durante los que podrá soportar entre quince y veinte usos.

Sigue en perfecto estado de funcionamiento y todo indica que seguirá así hasta que la EEI sea desactivada.

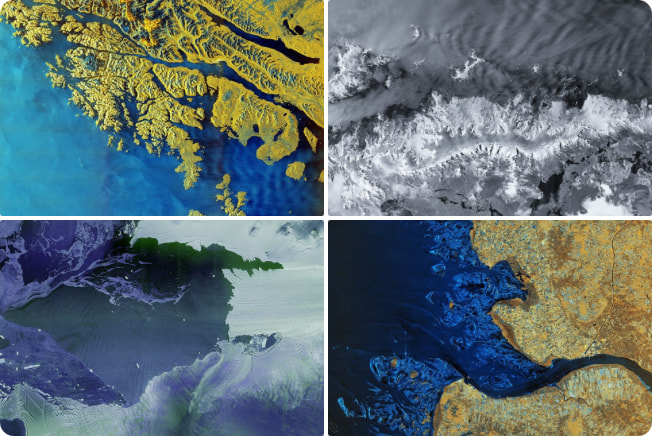
Microsatélites españoles: vigilancia de alta tecnología en formato mini para un mundo de clima cambiante.

Será probado en más ocasiones al o largo de las próximas semanas.
Le quedan aún dos sobrevuelos de la Tierra en 2026 y 2029 antes de emprende camino a su destino.

El plan es seguir utilizando esta primera etapa hasta que un día termine por fallar.

No está claro si tiene como objetivo animar al personal o si es un grito de ayuda al gobierno del país, pero pinta muy mal.

Lo que no sabemos aún es la fecha de lanzamiento de estas misiones.

Con todo, a la empresa aún le queda mucho trabajo antes de poder declarar el cohete operativo, y mucho más para tenerlo listo para ir a la Luna o a Marte.
El problema ha sido causado por un problema, ya corregido, con el software de a bordo que gestiona el amplificador de sus señales de radio.

Los fallos anteriores añaden un extra de presión en este próximo vuelo.
Sera utilizado para aumentar la altitud de la EEI en varias ocasiones a lo largo de los próximos meses.

Como siempre hay muy pocos datos sobre los objetivos a cumplir.

La serie incluye seis satélites que deberían proporcionar datos durante los próximos veinte años.

Es la configuración y el tipo de misión ideal para este lanzador.

Alcanzaron una altitud máxima de 106 kilómetros en un vuelo que duró poco más de diez minutos.

Llegan para una misión de unos ocho meses antes de recibir el relevo.

El equipo de la misión está teniendo problemas para poner en marcha uno de los dos.

En esta ocasión ha probado los seis motores de la nave, que serán los encargados de llevarla al espacio.

Será una misión de unos ocho meses a bordo de ella.

Si no hay problemas el próximo vuelo de prueba del sistema tendrá lugar el cuatro de agosto.
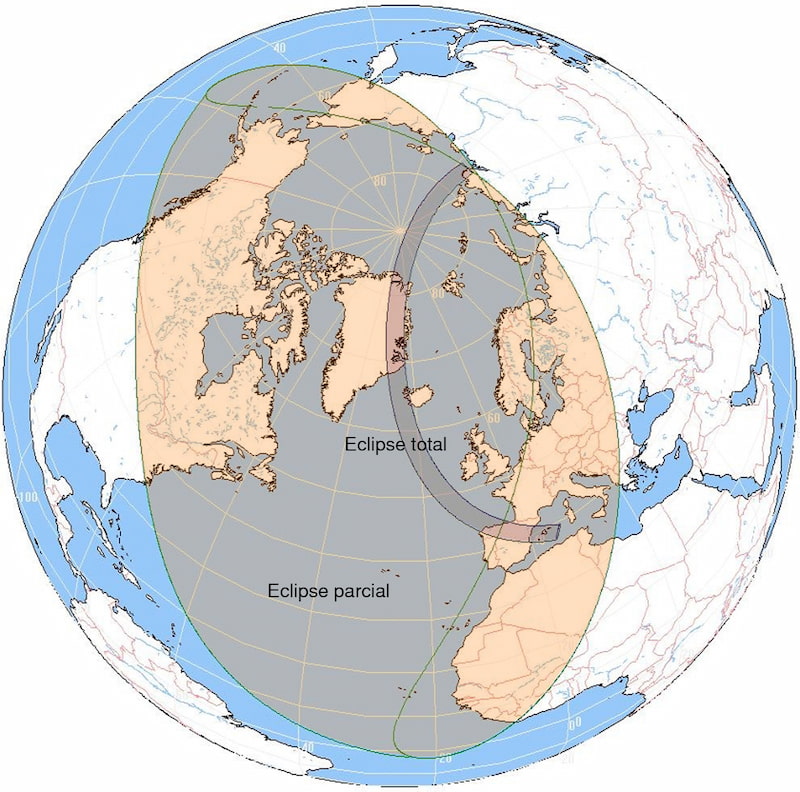
Próximos eclipses en España: planificar las vacaciones de 2026 a 2028 nunca fue tan astronómicamente importante.

Con un coste de 1.500 millones de dólares es el satélite de observación terrestre más caro jamás lanzado.

Ha sido el primer intento de lanzamiento orbital desde Australia en más de 50 años.
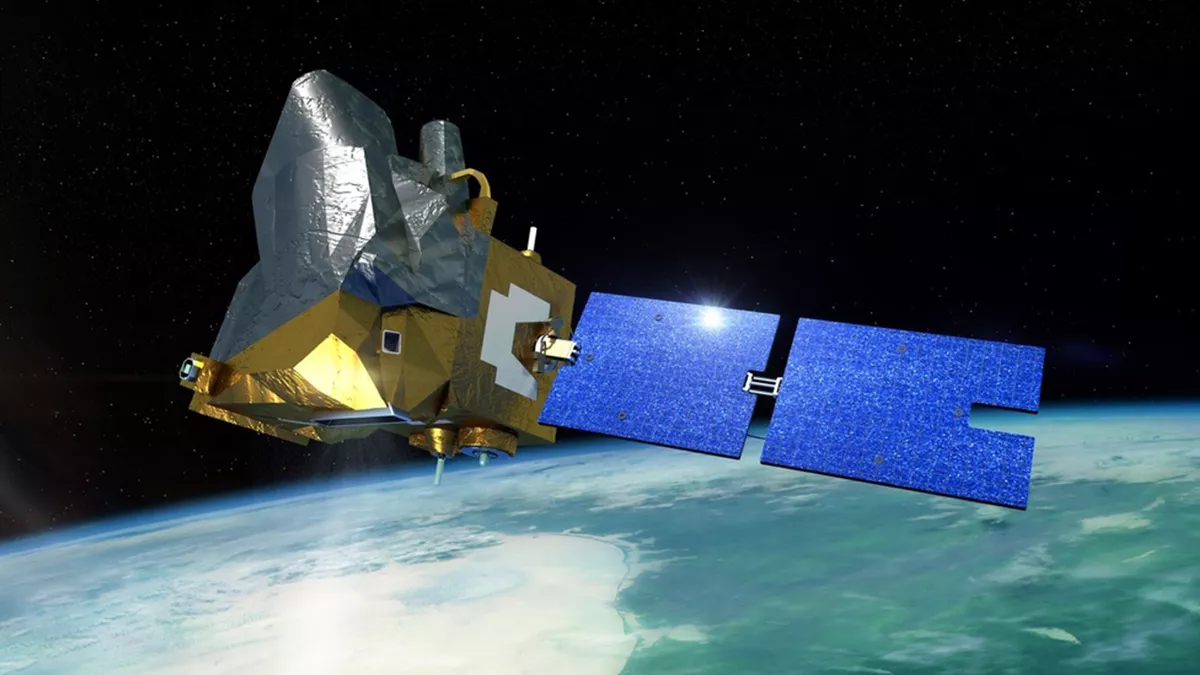
Servirá para dar continuidad a los datos de la misión OCO-2 de la NASA, lanzada en 2014.

Un rover lunar completamente equipado le permite explorar nuestro satélite en pos de nuevos descubrimientos científicos.

Samuel Antonio Jiménez da una explicación del origen de estas impresionantes máquinas sobre cómo fueron buscando soluciones a los desafíos que suponían.
Está aún en su fase inicial de pruebas pero los resultados ya son prometedores.

La empresa de Jeff bezos tiene que lanzar unos 1.600 satélites en los próximos doce meses para no incumplir con sus permisos.
Algo similar es bastante impensable hoy en día.

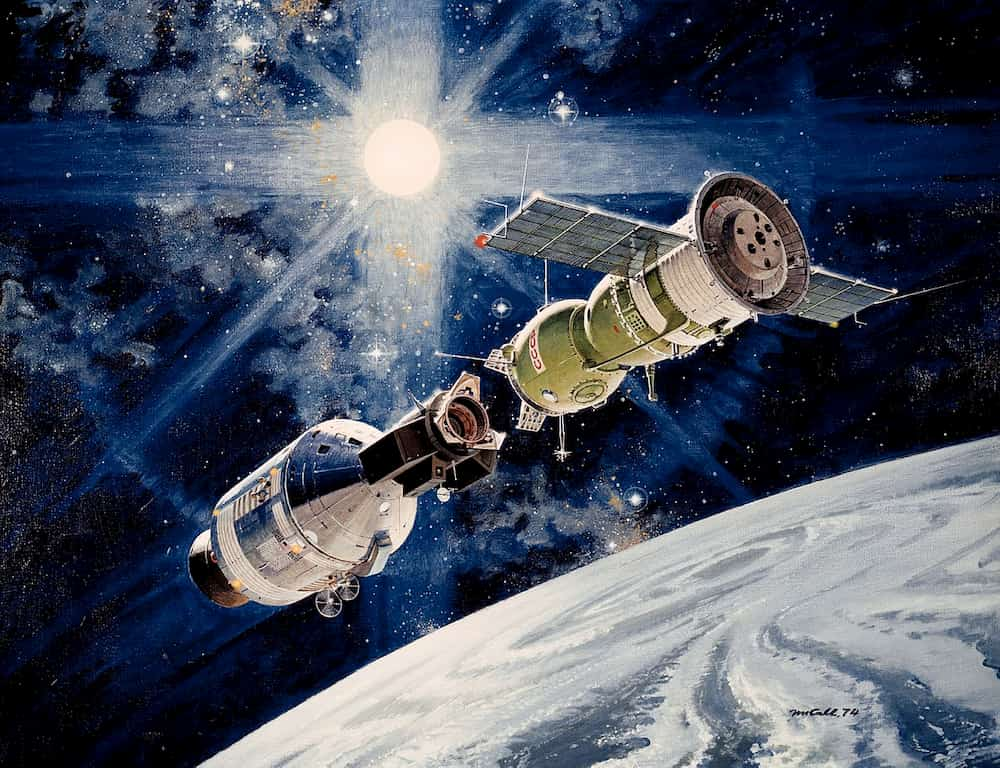
Tres astronautas de otras tantas agencias volaron a la Estación Espacial Internacional durante 18 días.

Por ahora está previsto que la misión siga activa mientras le quede combustible de maniobra.

Lleva a bordo cerca de seis toneladas y media de suministros.

Su futuro está en el aire debido a los recortes que la administración Trump quiere imponer al presupuesto de la NASA.

Andrew McCarthy captura con maestría el tránsito de la EEI frente a la Luna.

Hace algún tiempo que viene mostrando achaques, pero es insustituible.

No se sabe durante cuánto tiempo ocupará el puesto ni está claro que sea la persona más cualificada ni que le vaya a dar la vida para seguir atendiendo además las responsabilidades del puesto que ya tenía.

Un módulo de prueba fue dejado caer hasta en tres ocasiones para probar los sistemas de guiado y control de los parapentes que utilizará para aterrizar.

La selección final se producirá tras el consejo de ministros del ramo previsto para noviembre de 2025.

Lleva a bordo algo más de 2.600 kilos de materiales y suministros variados.

La empresa sigue buscando los límites de reutilización de las primeras etapas de sus cohetes.
Ayudará con la predicción en tiempo real de fenómenos atmosféricos extremos.

Será sustituida en unos días por la Progress MS-31.
Será necesario estudiar la posibilidad de instalar instrumentos más fiables de cara a un posible tercer intento.

Será sustituido por el H3, más barato de operar, y que lleva ya tres lanzamientos con éxito tras el fallo de su lanzamiento inaugural.

Han viajado como si fueran pasajeros de un avión, sin capacidad alguna para intervenir en el vuelo, así que no es muy correcto hablar de ellas como la tripulación de la nave.
Seguirá orbitando el Sol durante los próximos millones de años, en una misión extendida mientras le quede combustible de maniobra.

Estará dos semanas en la Estación Espacial Internacional llevando a cabo hasta trece experimentos y demostraciones de tecnología.

Estarán dos semanas a bordo de la EEI llevando a cabo distintos programas de actividades.

Permitirá entender mejor cómo se crean las eyecciones de masa solar y probar nuevos sistemas de orientación y posicionamiento para futuras misiones.

Esto supone un nuevo revés para SpaceX en el desarrollo de este cohete.

Su órbita en el futuro, que cada vez irá teniendo más inclinación, le permitirá ver los dos polos con más detalle.
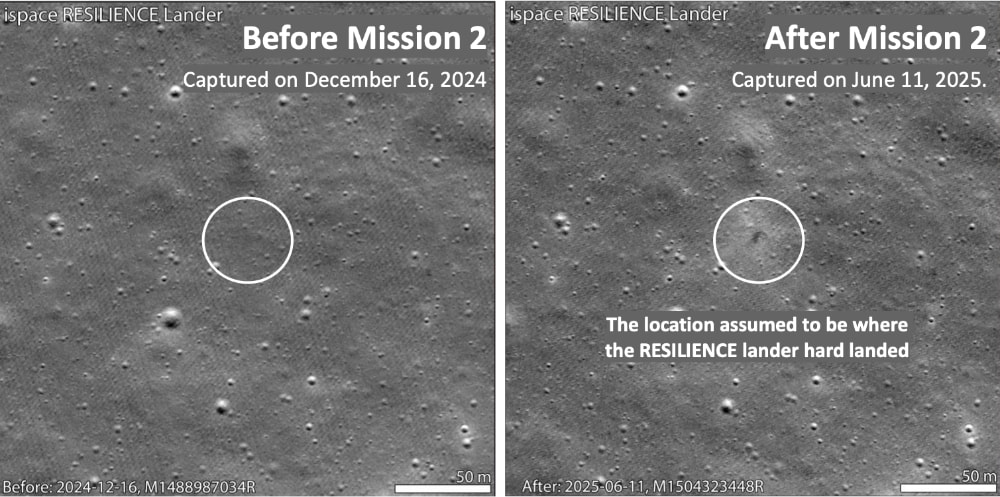
Era el segundo intento de la empresa ispace de colocar uno de sus aterrizadores sobre la superficie de nuestro satélite.
Su proximidad a Elon Musk y su insuficiente alineamiento con la causa MAGA parecen haber sido los dos factores fundamentales que han terminado con sus opciones.

Ha sido el decimosegundo lanzamiento tripulado de este cohete; el trigésimo segundo en total de su carrera.

De los diez países fundadores se ha pasado a los 23 estados miembros actuales, además de otros que tienen la consideración de colaboradores.

La agencia espacial china tiene programadas sendas misiones más a Marte y a Júpiter para lanzarlas antes de que termine esta década.

Aunque los objetivos no eran más ambiciosos que en anteriores ocasiones se trataba de una misión sometida a mucho escrutinio porlos fallos anteriores.

Es un resultado, una vez más, impresionante para unas sondas lanzadas en 1977 para una misión de cinco años.

Es muy fácil de ver y con las nuevas apps aún es más sencillo hacerlo.
Es la única nave en servicio a la Estación Espacial Internacional que tiene capacidad de retorno de carga significativa; todas las demás de destruyen en la reentrada o apenas pueden traer unos pocos kilos a bordo.

Tras el fallo de las etapas superiores de los dos anteriores será seguido con especial interés.
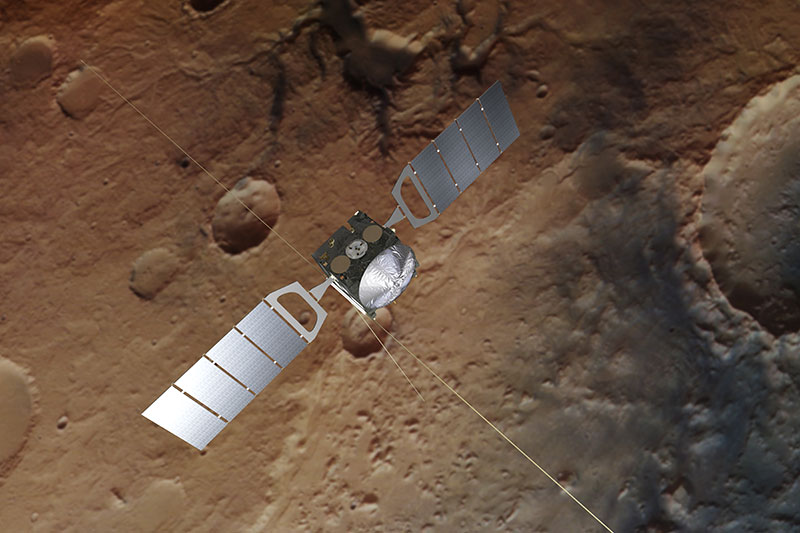
Sus siete instrumentos podrán seguir trabajando en el estudio de la superficie y la atmósfera del planeta rojo.
Hoy en día la forman siete estaciones, aunque otras de otras agencias e incluso de empresas privadas colaboran con ella.
Es posible que haya llegado de una pieza al a superficie del mar ya que estaba diseñada para sobrevivir a un descenso en la atmósfera de Venus.

Su diseño extremadamente resistente hace que no sea descabellado pensar que puede alcanzar la superficie terrestte de una sola pieza.

Tendrá aún que negociarlo en el congreso y el senado pero hasta ahora no ha tenido mucha oposición en nada.

2.417 piezas permiten construir uno de los Boeing 747 modificados para la tarea y el Enterprise, el único transbordador que nunca fue al espacio.

Llevará a cabo el segundo intento de aterrizaje de la empresa en nuestro satélite el próximo cinco de junio.
Es un paso fundamental e imprescindible de cara a su entrada en servicio.

Otro paso más del ambicioso programa espacial chino.

Dispone de un radar que permitirá obtener un perfil más detallado que nunca de la cobertura forestal de nuestro planeta.

Permanecerán seis meses a bordo hasta que llegue su relevo.

Ha servido como un ensayo general para las fugaces visitas a sus objetivos que llevará a cabo durante los doce años que se prevé que dure la misión
Han sido necesarios cerca de treinta años de desarrollo para tenerlos listos.

Donald Pettit, el astronauta de la NASA que ha vuelto a bordo de ella, se ha convertido en la persona de más edad en hacer una misión de larga duración a la Estación Espacial Internacional.

Seis mujeres con destacadas carreras profesionales –pero no astronautas– han ido unos minutos al espacio.

Tiene el puesto prácticamente garantizado gracias al apoyo del presidente Trump y de Elon Musk.

Darán el relevo a sus compañeros de la MS-26, que llevan en órbita desde septiembre de 2024

Han superado con creces el récord de inclinación orbital de una misión tripulada, hasta ahora en poder de Valentina Tereshkova.

El fallo de varios propulsores del sistema de maniobra hizo que por momentos no hubiera control completo sobre la cápsula.
Durará cuatro días durante los que se llevarán a cabo hasta 22 experimentos y proyectos de investigación, parte de disfrutar de las vistas.
Si por fin consigue despegar pondrá fin a una saga que empezó en 2001.

Con 234 día acoplada a la Estación Espacial Internacional ha sido la más larga de este tipo de cápsulas hasta la fecha.

Tiene mucho mérito, de todos modos, que en apenas siete años Isar Aerospace haya podido llegar tan lejos.

No supone ningún problema inmediato porque siempre hay reservas de meses de provisiones a bordo de la Estación Espacial Internacional.

Viajar a Marte no es un paseo por el campo, niños: las maniobras de Hohmann, bi-elípticas y asistencias gravitatorias son los trucos para el viaje perfecto.
El legado de la misión son los teras de datos que deja detrás, que seguirán produciendo trabajos científicos durante años.
La idea es evitar la dependencia de otros países para el acceso al espacio.
No ha habido ningún tipo de comunicación oficial al respecto pero el cambio es significativo.

Es un hito importantísimo, en especial de cara a conseguir una capacidad de lanzamiento independiente de la voluntad de otros países supuestamente aliados como los Estados Unidos.

Falta aún para alcanzar dos lanzamientos seguidos en menos de 24 horas pero parecen estar en el camino adecuado.

La misión tiene una duración inicial prevista de seis años a lo largo de la cual producirá unos 100 GB de datos al día que serán catalogados con la ayuda de una IA.

La campaña de desinformación al respecto orquestada por Elon Musk y Donald Trump ha sido espectacular e innecesaria.

Estarán en el espacio hasta el mes de julio.
Ahora queda aproximadamente año y medio para que alcance su destino.

La racha anterior de lanzamientos sin pérdidas fue de tres años y medio.

Uno estudiara la historia del universo; los otros la región más externa de la atmósfera del Sol.

La idea es seguir usándolo mientras aguante para determinar los límites del hardware.
Las declaraciones al respecto de Elon Musk y Donald Trump son un sinsentido.

Al resultado parece muy parecido al de Odiseo, la anterior misión de la empresa a nuestro satélite.

Repite casi al pie de la letra los resultados del anterior, lo que indica que las mejoras entre ellos no parecen haber sido efectivas.

Llega en un momento crítico de las relaciones entre Europa y los Estados Unidos.

Son las sondas que más lejos han llegado de la historia.
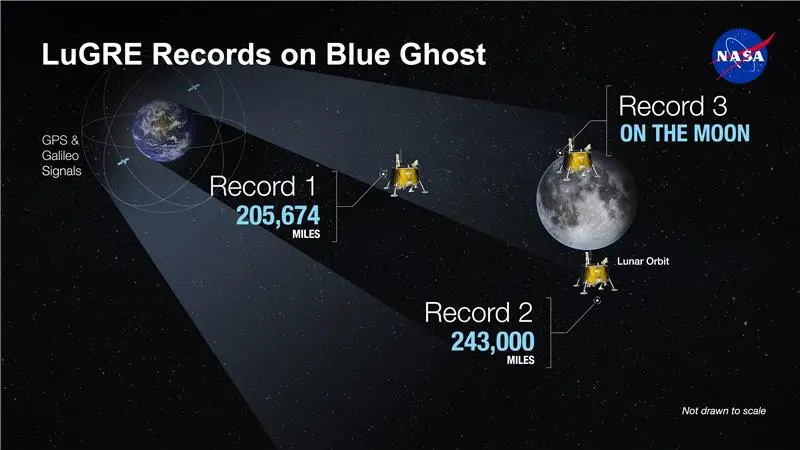
GNSS en la Luna: de «Houston, tenemos un problema» a «¿Siri, dónde está el cráter?» Todo un hito en la navegación espacial.

Su módulo Blue Ghost M1 operará durante dos semanas.

Le quedan aún algo más de cinco años de viaje.

Es la tercera misión lanzada hacia nuestro satélite en lo que va de año.

Fugas de propelentes causaron un incendio que provocaron la pérdida de la segunda etapa del cohete.

La duración total de su viaje apenas ha sobrepasado los diez minutos.

Probalemente sólo quede en una rabieta pero a saber.

Será el segundo –o tercer, depende de cómo lo mires– español en ir al espacio.
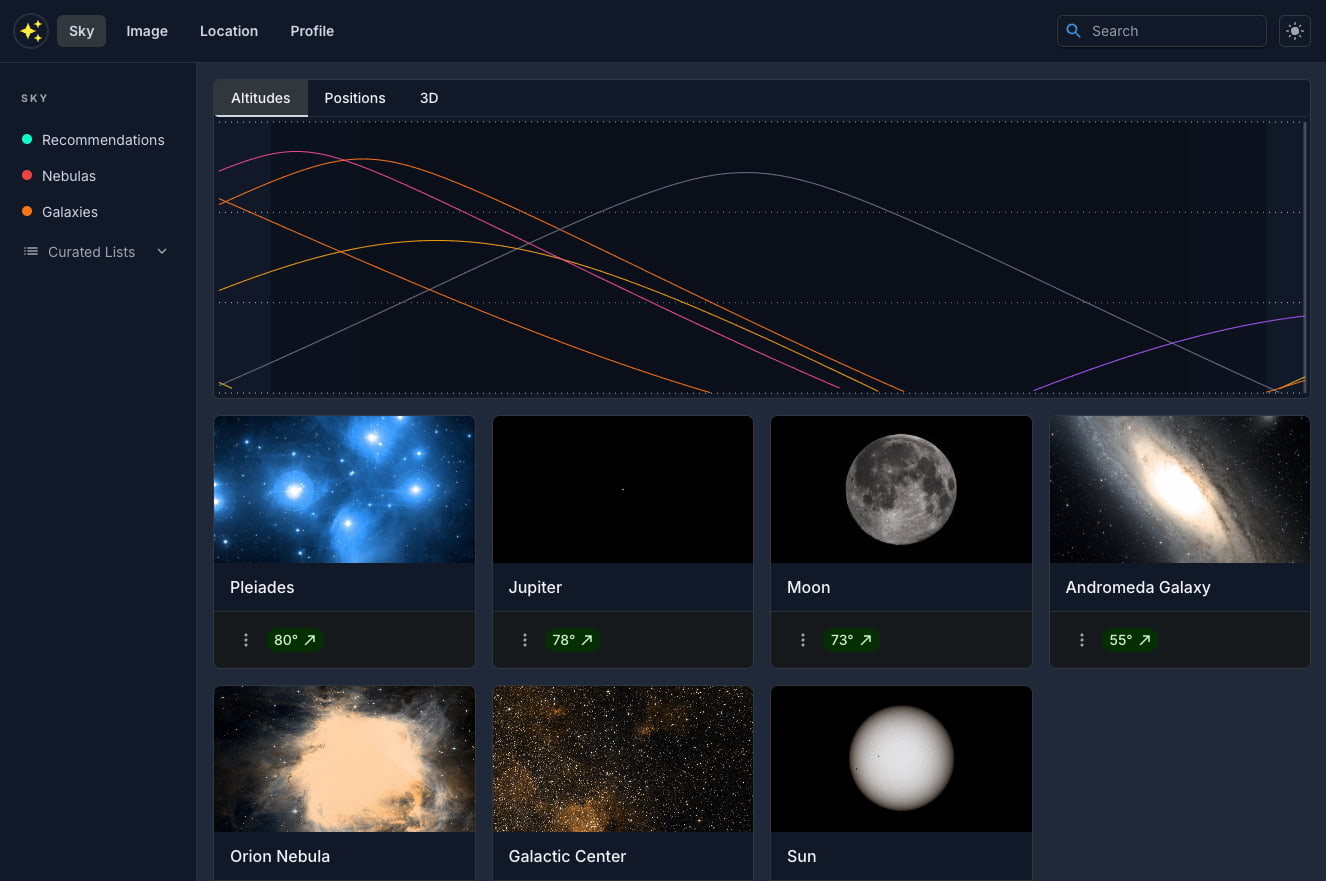
Inteligencia artificial y astronomía se unen en una app que indica planetas y estrellas visibles. Si la contaminación lumínica lo permite.
En unos meses le seguirá su gemelo el SpainSat NG II.

Llevarla a cabo supondría crear el caos en la programación de vuelos a la EEI.
Es un muy importante paso adelante para futuras misiones.

Una galaxia, 200 millones de estrellas y un archivo gigantesco: Andrómeda como nunca antes se había visto, gracias a los trabajos de una década del telescopio Hubble.
Esta herramienta visual del Sistema Solar permite explorar en 3D datos de objetos celestes.
La segunda etapa explotó a los pocos minutos del despegue.

Es uno de los más potentes del mundo.
El agotamiento de su combustible de maniobra obliga a poner fin a su misión, que en cualquier caso ha durado más del doble de lo previsto.

Son los primeros pero no los únicos que partirán hacia nuestro satélite este año.

Deberían darle un carnet de viajero frecuente.
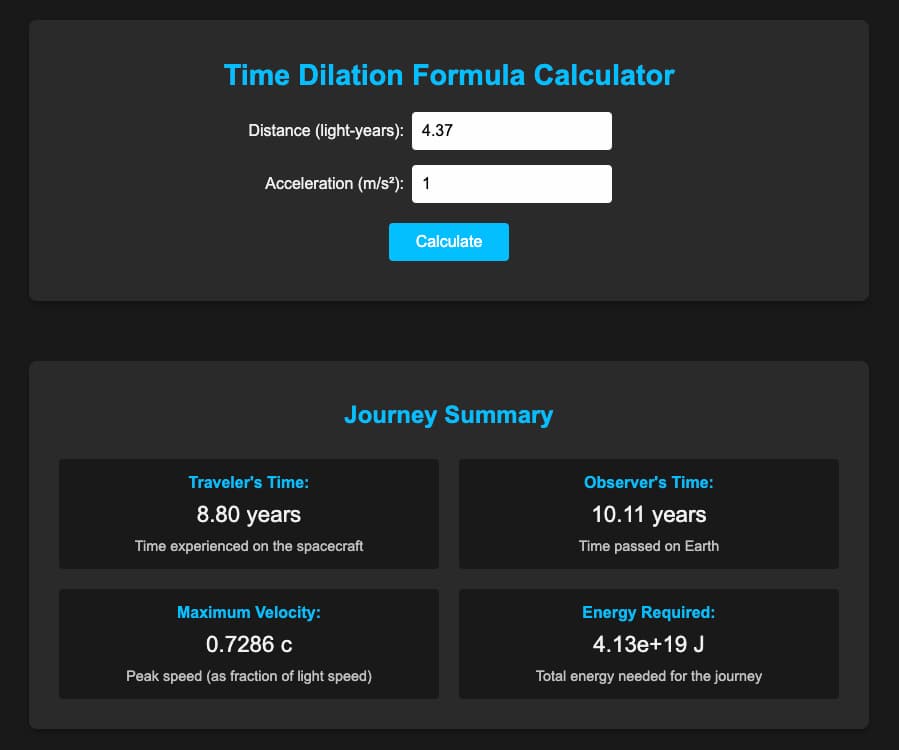
Alcanzar incluso las estrellas más cercanas implica velocidades extremas y consumir el equivalente a 397 millones de camiones cisterna llenos de gasolina, entre otras dificultades.
Son una interna y otra privada, con costes entre 5.800 y 7.700 millones de dólares, para ser lanzadas sobre 2030.
Si todo va según lo previsto llegará a su destino en noviembre de 2026.

Un extraño hallazgo en Kenia: un anillo de separación de cohete, de 500 kg, que ha sorprendido a todos. La búsqueda del responsable ya ha comenzado.

Programado para el 6 de enero de 2025 llega con algo más de cuatro años de retraso sobre lo previsto.
Si todo va bien hará otros cuatro a lo largo de 2025

Un porcentaje de éxitos del 94% respalda su carrera.
Un eficaz escudo térmico, un sistema de refrigeración por agua y la velocidad son clave.

Combina el encanto de la tecnología informática retro con características modernas, aunque su precio de 795 euros puede asustar.

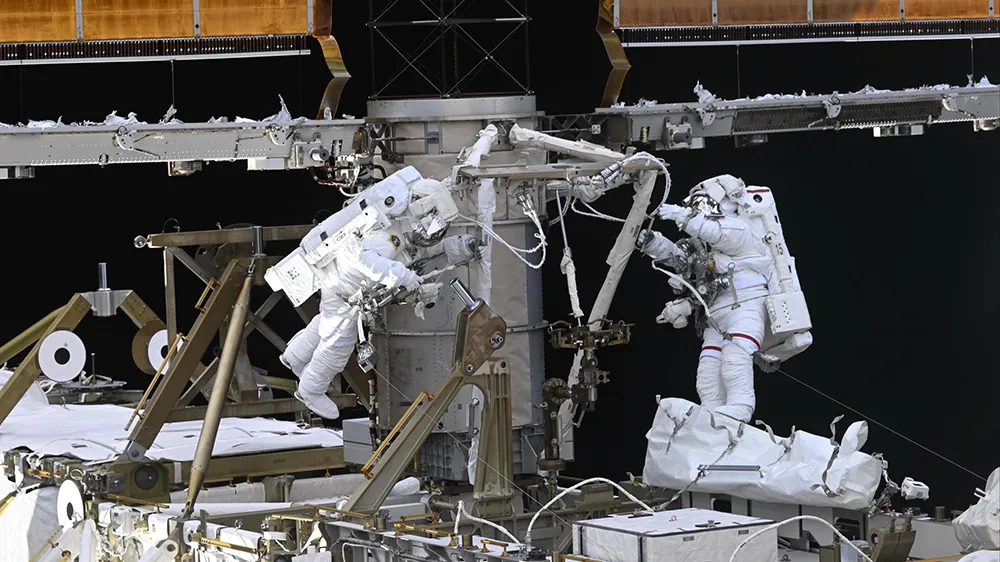
En una sesión de 7 horas dos cosmonautas instalan nuevos equipos y hacen limpieza en la EEI.

El intento se saldó con un nuevo fracaso, pero al menos no hubo explosiones espontáneas esta vez.
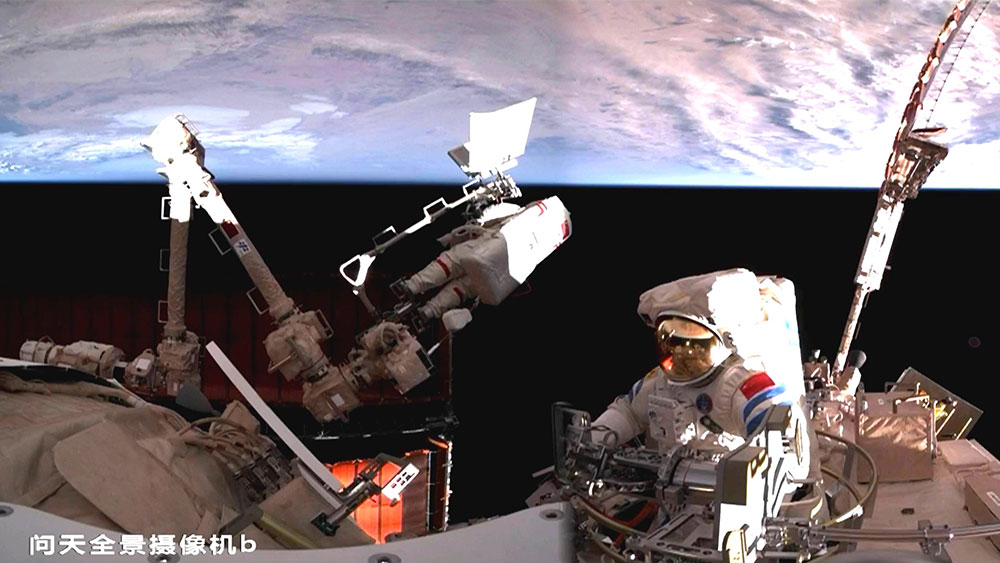
Dos astronautas chinos establecieron un nuevo récord con un paseo espacial de 9 horas y 6 minutos, superando al anterior por 10 minutos.

Nuestro satélite natural no solo ilumina las noches, también influye directamente en las mareas y en la rotación de la Tierra. La interacción gravitatoria entre ambos cuerpos provoca efectos fascinantes como las libraciones, que nos permiten ver algo más de la...

Blastoff! A #LongMarch5B Y6 rocket with Yuanzheng-2 Y2 upper stage, has sent a group of new satellites for satellite internet services into orbit! The rocket lifted off at 6:00pm BJT on Dec. 16 from the #Wenchang Spacecraft Launch Site on the southern...
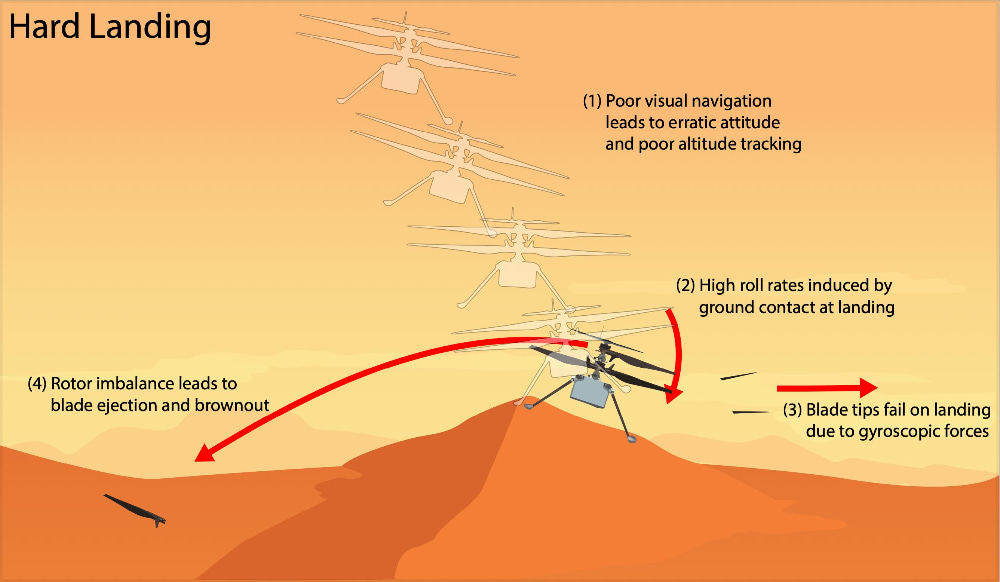
Ingenuity, tras 72 vuelos, se estrelló por un fallo en su sistema de navegación. Ahora se ha convertido en una estación especie de meteorológica.
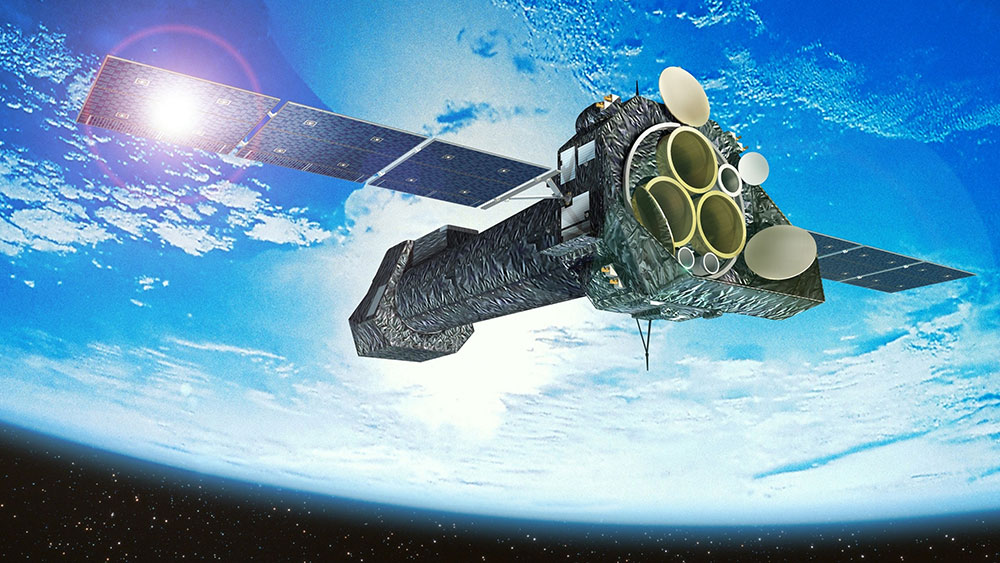
Con 3 telescopios y 58 espejos, el XMM-Newton explora el universo en rayos X.

Lanzamiento de la misión – SpaceX Hace unos días un cohete Falcon 9 de SpaceX ponía en órbita un lote de 24 satélites Starlink, lo que es casi completamente rutinario a estas alturas. Pero la novedad está en el que la primera...
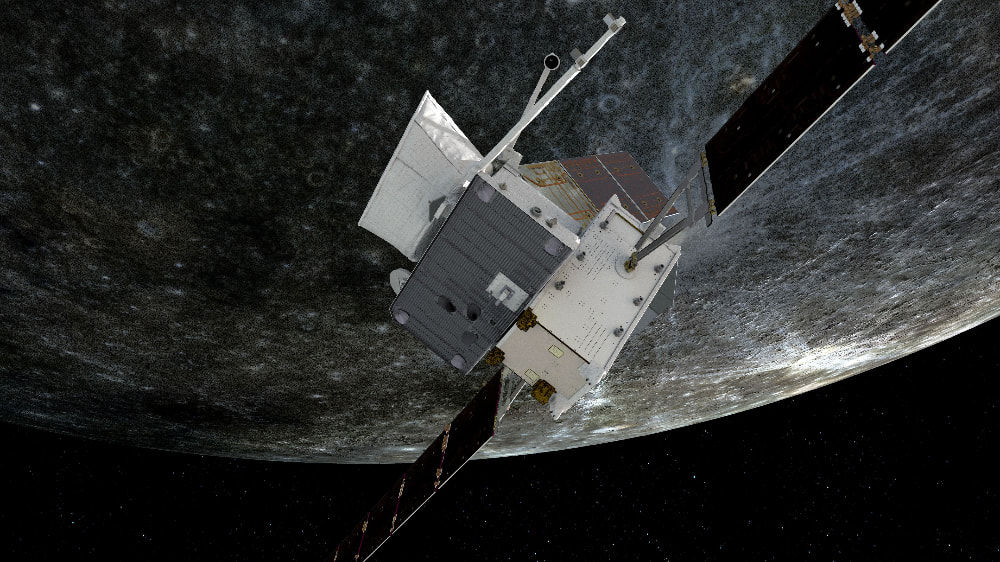
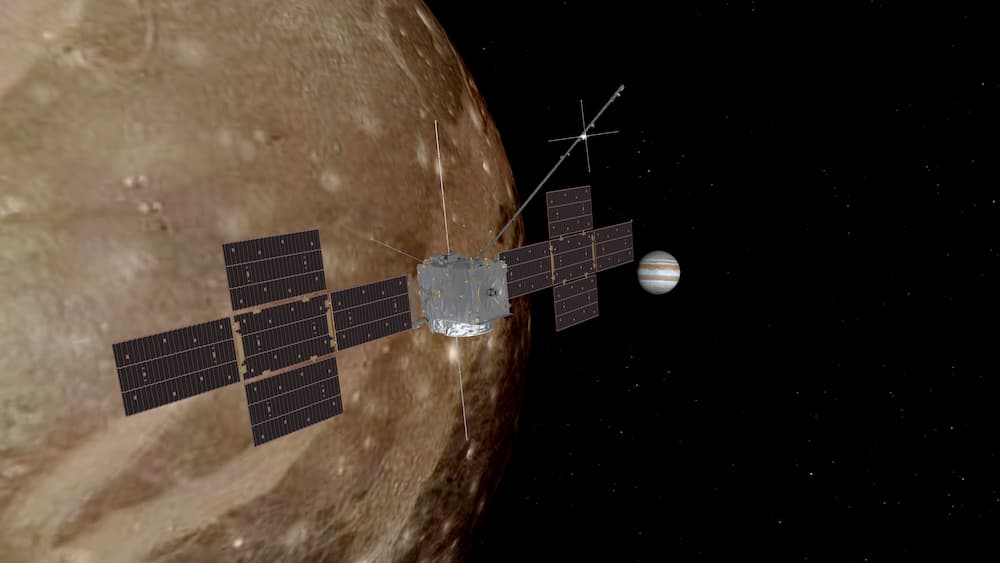
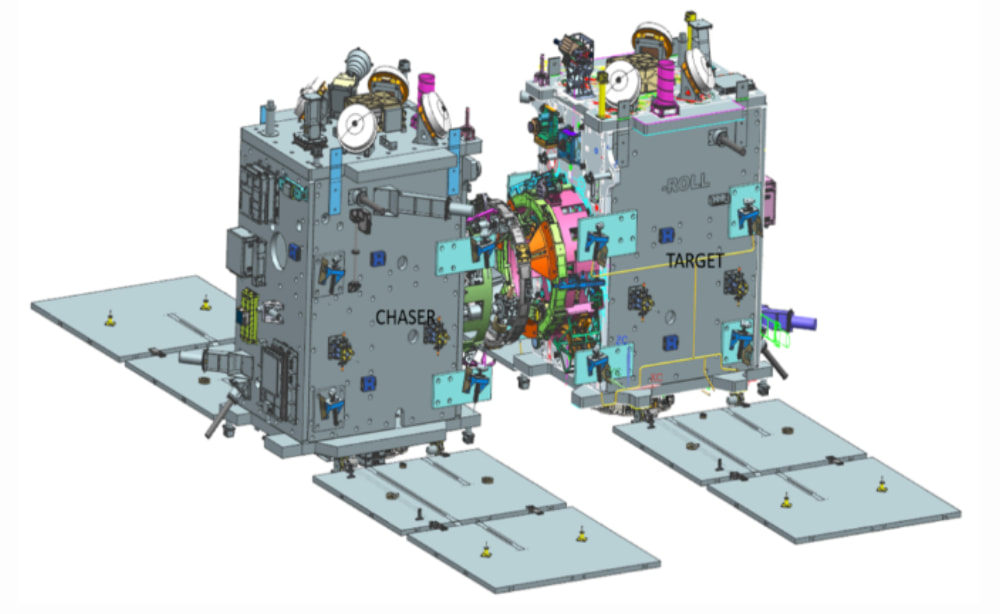
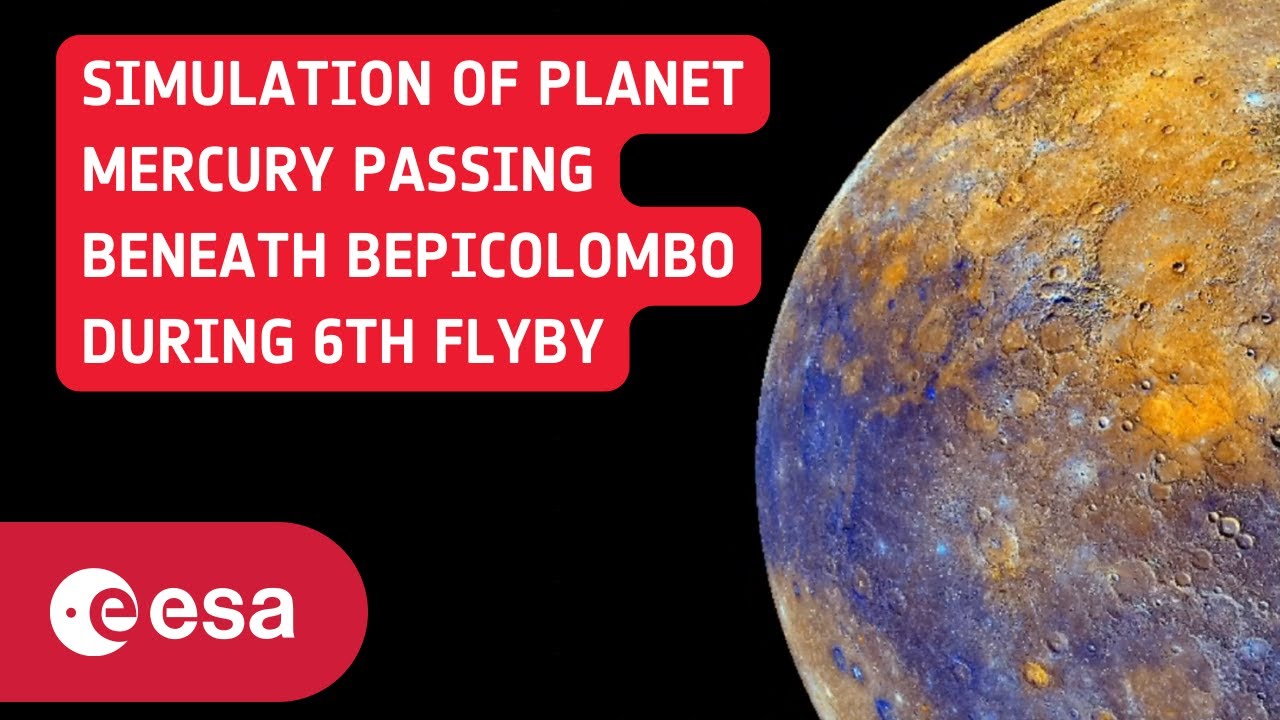
Mercury in motion... One of the #BepiColombo selfie-cameras captured Mercury today as the spacecraft rushed by the planet at almost 3 km per second.This time-lapse of unprocessed images was captured during 10:26-11:18 UTC today (11:26-12:18 CET), between 53700 and 48000 km… pic.twitter.com/NPlnLCBOr3—...
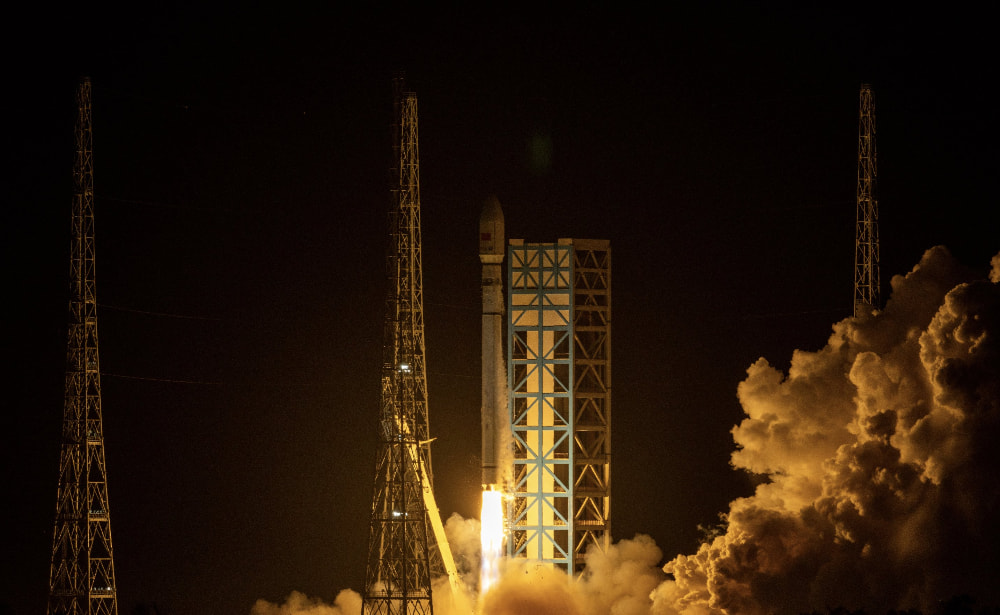
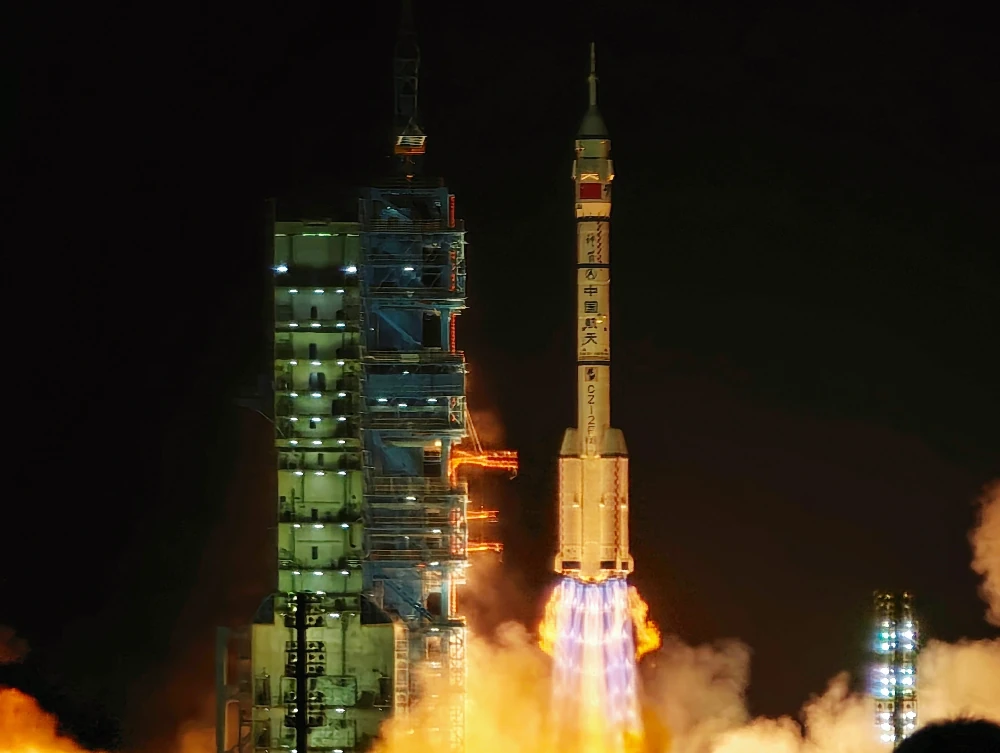
Esta tarde China ha lanzado con éxito su primer cohete Larga Marcha 12 (CZ-12) desde el Centro de lanzamientos comerciales de Hainan. A bordo llevaba un par de satélites experimentales. Era también el primer lanzamiento desde Hainan. El CZ-12 es un...

A remarkable journey to space and back. #NS28 pic.twitter.com/bBkLVxLe67— Blue Origin (@blueorigin) November 23, 2024 Este pasado viernes Blue Origin llevó a cabo el lanzamiento número 28 de su cohete New Shepard. A bordo de la cápsula RSS First Step iban seis...
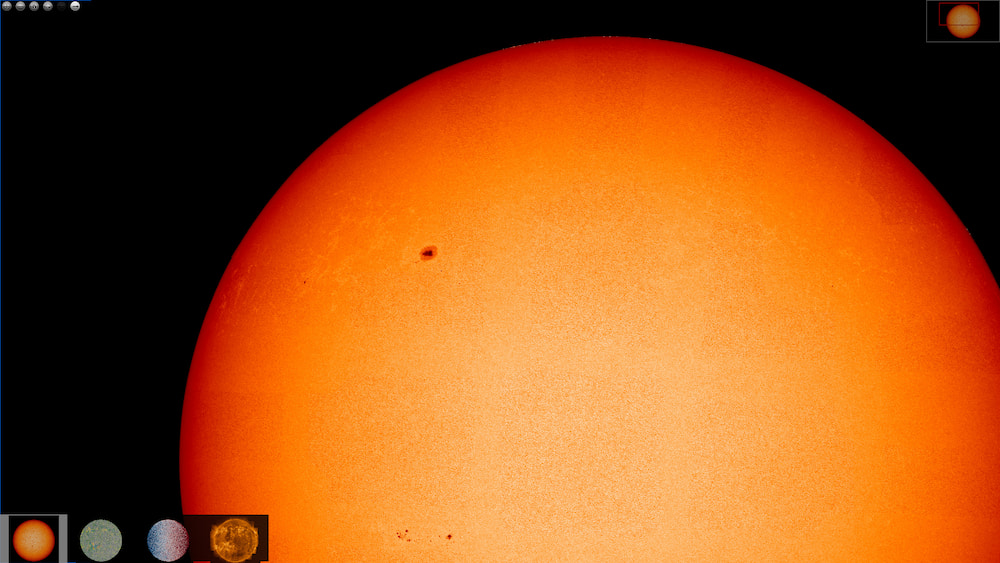
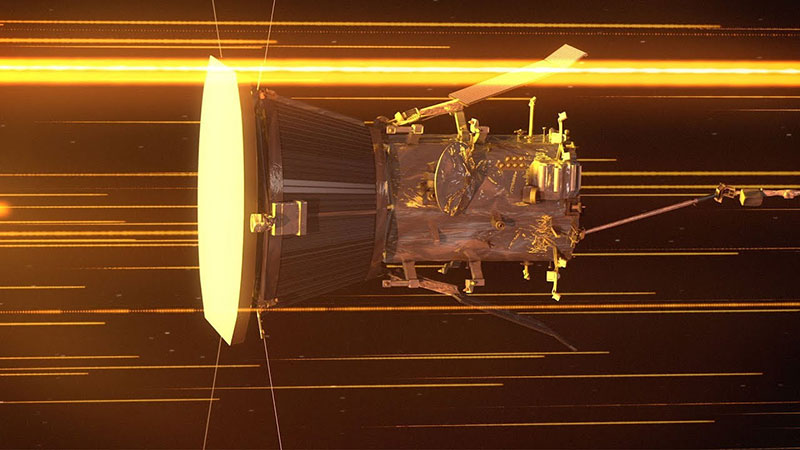
Nuevas imágenes del Sol tomadas por la Solar Orbiter muestran detalles del astro rey a máxima resolución.

The Progress 90 cargo craft is safely in orbit following a successful launch at 7:22am ET. Progress, carrying nearly three tons of food, fuel, and supplies for the Exp 72 crew, will dock to the space station’s Poisk module at 9:36am Saturday,...

With data and flight learnings as our primary payload, Starship’s sixth flight test once again delivered → https://t.co/oIFc3u9laE pic.twitter.com/O6ZKThQRr6— SpaceX (@SpaceX) November 20, 2024 Esta pasada noche ha tenido lugar el sexto vuelo del Starship de SpaceX. En general se puede decir...

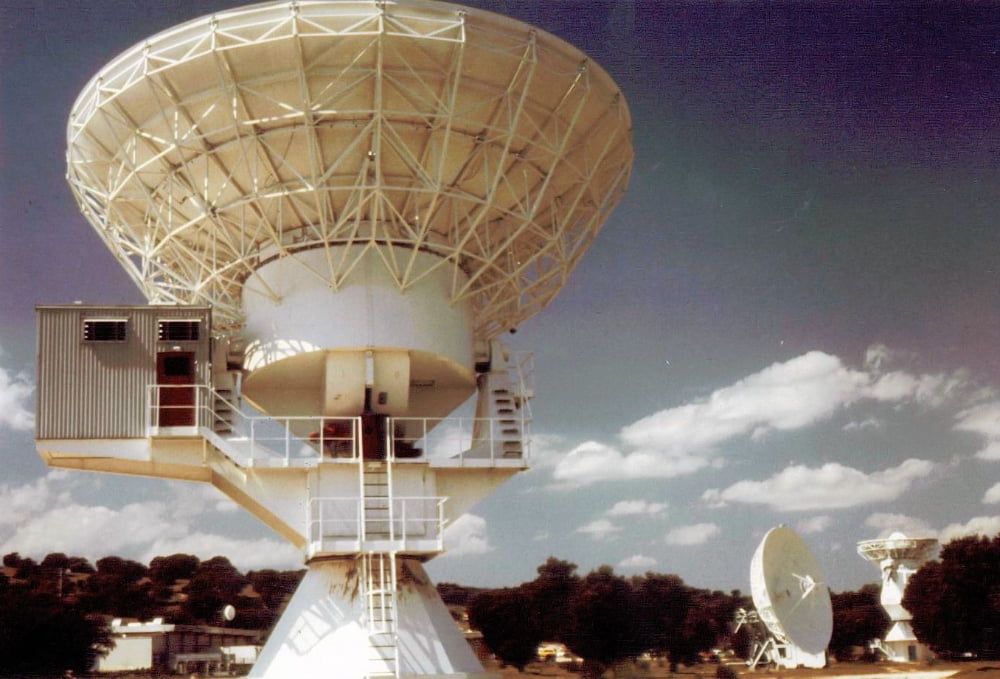
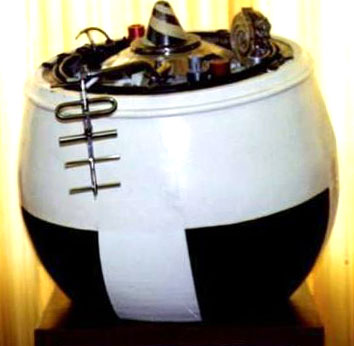
Un modelo a tamaño real del Intasat 1 con personas al lado para ver su tamaño – INTA Tal día como hoy en 1974 un cohete Delta lanzaba desde la Base de la Fuerza Aérea Vandenberg en California el Intasat 1, el...

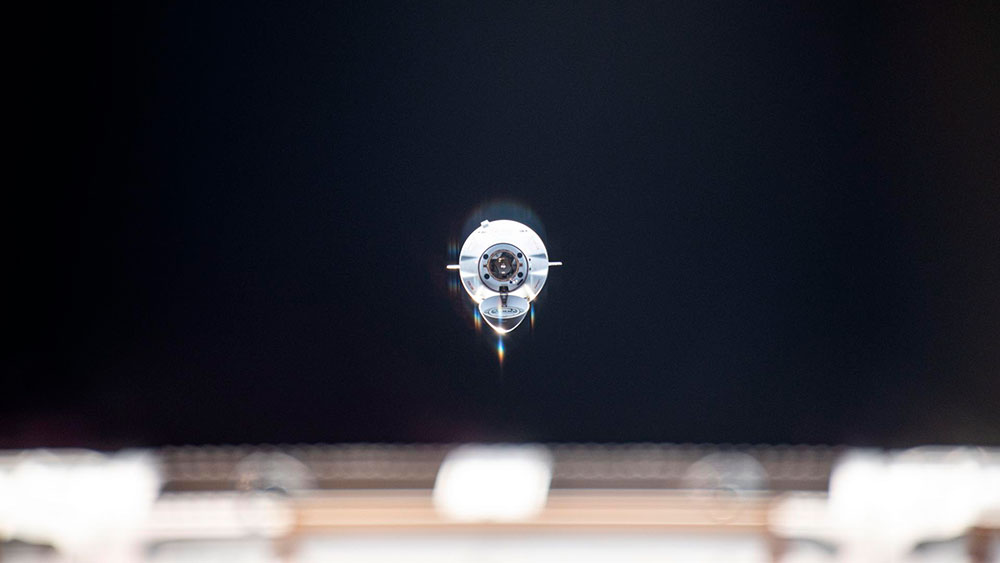
Liftoff of Dragon's 31st Commercial Resupply Services mission to the @Space_Station! pic.twitter.com/MPRoutKS3t— SpaceX (@SpaceX) November 5, 2024 Poco más de doce horas después de su lanzamiento la cápsula de carga Dragon 31 se acoplaba al puerto frontal del módulo Harmony de la...
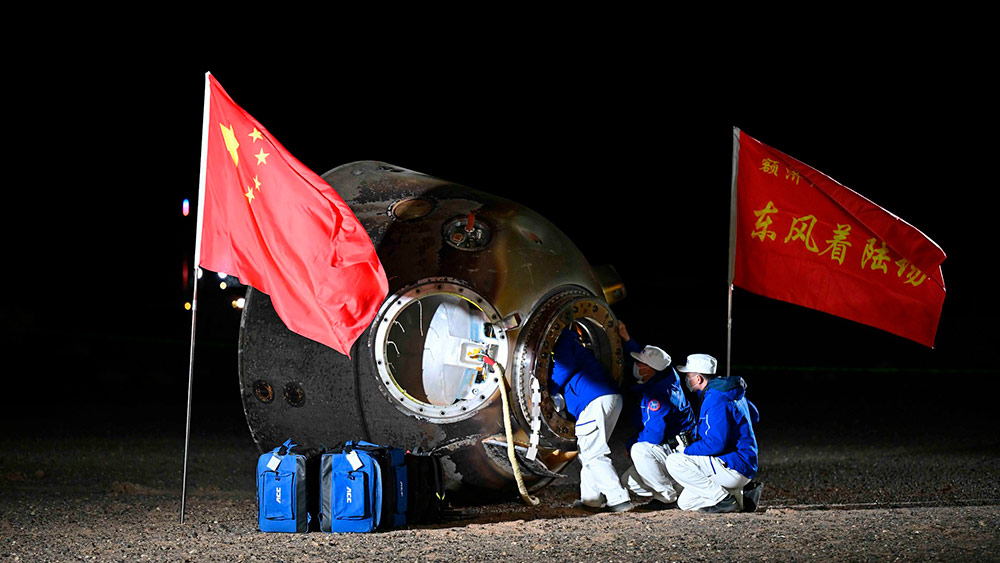
A media tarde –ya de noche en China– la cápsula espacial tripulada china Shenzhou 18 aterrizaba en la zona de aterrizaje Dongfeng con dos nuevos récords. Uno, el de misión tripulada más larga, con un total de 192 días y cuatro...

El Evento Laschamp sucedió hace unos 42.000 años, momento en el que el campo magnético de la Tierra se debilitó hasta el 5 por ciento de su fuerza actual. Ahora unos científicos de la Universidad Técnica de Dinamarca y del Centro...
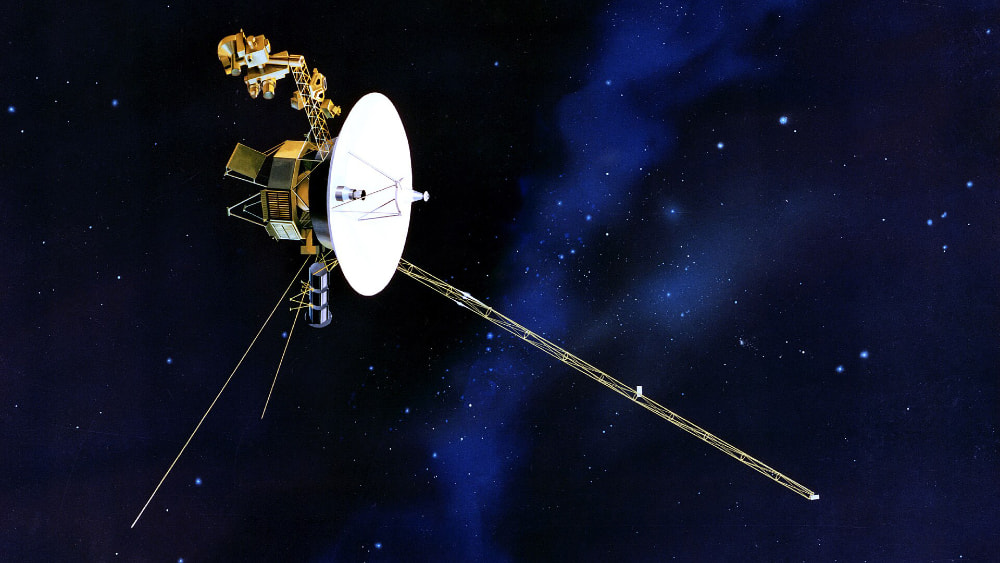
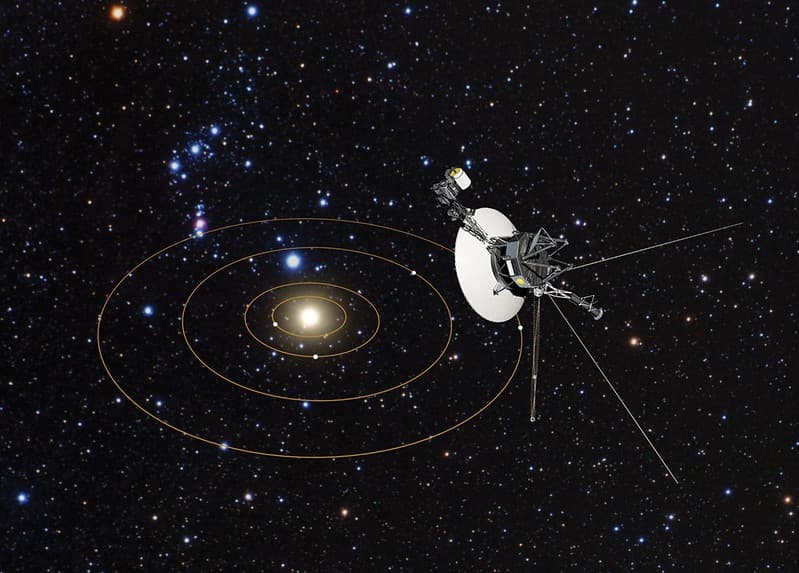
I thought Voyager1 really was gone this time but appears not! Just appeared with its S band transmitter. And an official post https://t.co/KSwgHXiW29 pic.twitter.com/9Qf9FvGBA3— Bernard Netherclift (@Bernard1963) October 29, 2024 La NASA anunciaba hace unas horas que ha retomado el contacto con...

Esta pasada noche China ha enviado una nueva tripulación a su estación espacial (CSS por las siglas en inglés Estación Espacial China). Viajaban en la cápsula Shenzhou 19, que se acopló a la estación sin problemas aproximadamente seis horas y media...
Impresión artística de la Voyager 1 en el espacio – NASA/JPL La NASA no se lo ha dicho a nadie pero lleva una semana sin contacto con la Voyager 1. Lo sabemos gracias al ojo avizor de Bernard Netherclift, que el pasado...
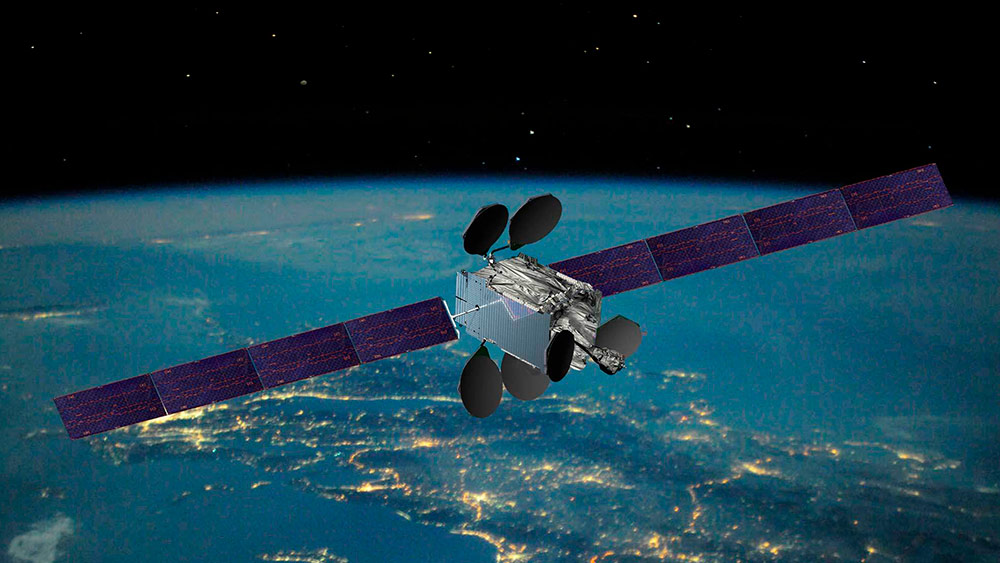
Impresión artística del Intelsat 33e en órbita y de una pieza – Boeing Boeing no levanta cabeza. El último ha sido la explosión en órbita geoestacionaria del satélite de telecomunicaciones Intelsat 33e, fabricado por la empresa. Se trata de una órbita popular...

Splashdown of Dragon confirmed – welcome back to Earth, @dominickmatthew, Mike, @Astro_Jeanette, and Sasha! pic.twitter.com/3fhqlQ3btP— SpaceX (@SpaceX) October 25, 2024 Hace unas horas la cápsula tripulada Crew Dragon Endeavour amerizaba en el Golfo de México, poniendo fin a la misión Crew-8. A...

Hace unos minutos Blue Origin ha estrenado nuevo cohete y nueva cápsula tripulada para sus vuelos espaciales suborbitales. Quería haberlo hecho hace un par de semanas pero primero un problema con el cohete y luego un problema con el GPS obligaron...

Antes muertos que sencillos – Axiom Space / Prada Hoy, durante el Congreso de Astronáutica, que está teniendo lugar en Milán, Axiom Space y Prada –sí, Prada, la firma italiana de moda– han presentado el traje espacial AxEMU que utilizarán las tripulaciones...
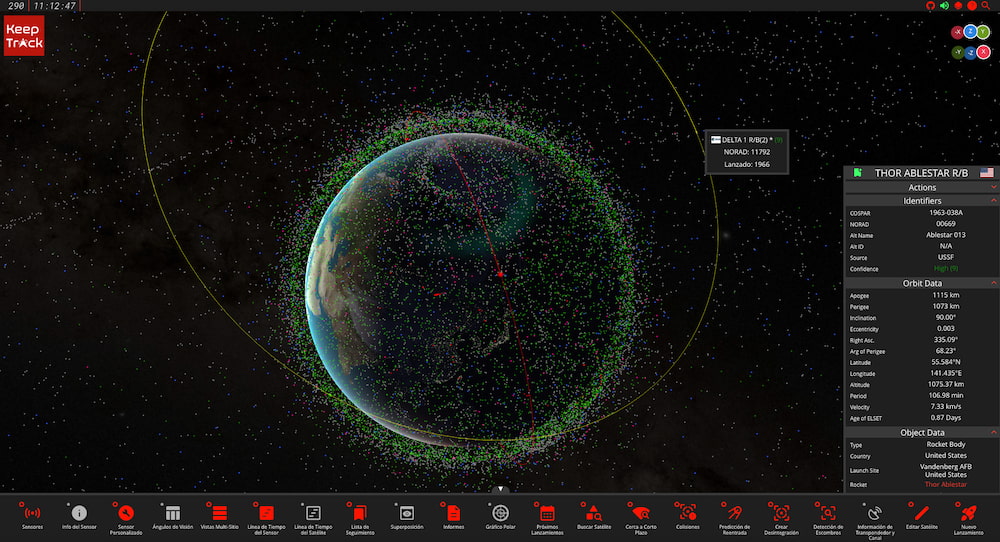
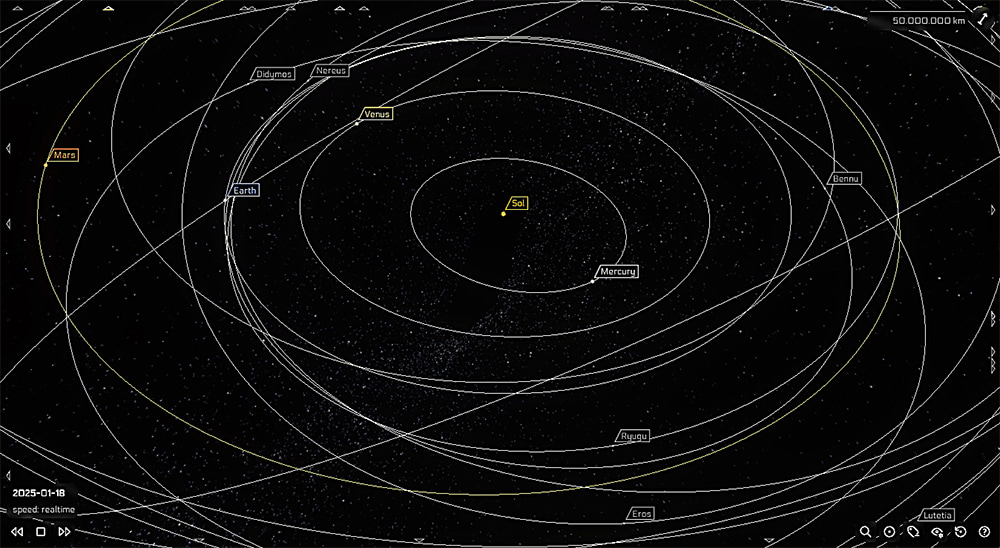
Descubrí hace unos días KeepTrack, una impresionante herramienta para el seguimiento de satélites y la visualización de órbitas y datos. Es el sueño de cualquier friki de la «chatarra espacial»; astrodinámica diseñada para gente de a pie, con gráficos dignos de...

Liftoff of Falcon 9! pic.twitter.com/WRuvT58Pr1— SpaceX (@SpaceX) October 15, 2024 Esta mañana SpaceX lanzaba un lote de satélites Starlink desde el Complejo de lanzamiento 40 de Cabo Cañaveral. Ese lanzamiento marcó la tercera vuelta al servicio del Falcon 9 en dos meses...
Falcon Heavy lifts off from pad 39A in Florida for the 11th time! pic.twitter.com/tcZu1LOOOm— SpaceX (@SpaceX) October 14, 2024 Hace unas horas un Falcon Heavy despegaba de la plataforma 39A del Centro Espacial Kennedy para lanzar la sonda Europa Clipper de la...

Liftoff of Starship! pic.twitter.com/WyNRN1fLbd— SpaceX (@SpaceX) October 13, 2024 [Anotación en actualización] Tras unas cuantas semanas de espera por la autorización de la Administración Federal de Aviación (FAA) de los Estados Unidos hoy por fin ha tenido lugar el quinto lanzamiento de...

Hace unos días la Agencia Espacial Española (AEE) presentaba su identidad visual, que incluye su nuevo logo. Ese que puedes ver ahí a la derecha. Pero llega envuelto en polémica porque no es el que había sido escogido originalmente. La AEE convocó...
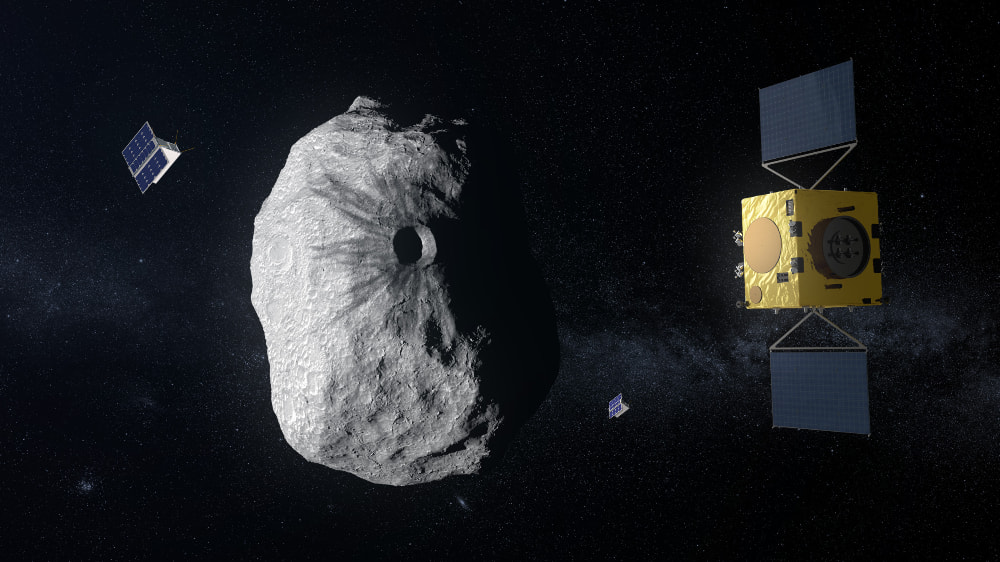
We have a mission!!#HeraMission's solar arrays have deployed and its batteries are charging. The satellite is in good health and the first commands have been confirmed on board. pic.twitter.com/ChckwCmNw9— ESA Operations (@esaoperations) October 7, 2024 Aunque la meteorología no era la más...

Europa necesita una empresa líder que sea capaz de competir en el nuevo escenario espacial, que pueda competir con los Estados Unidos y con China. Pensamos que PLD Space puede ocupar ese lugar– Ezequiel Sánchez,Presidente Ejecutivo de PLD Space. Hoy ha...

El SpaceShipOne puede ser visto en el Smithsoniano – Museo Nacional del Aire y el Espacio Hoy hace veinte años que el SpaceShipOne ganaba el Ansari X Prize (Premio Ansari X) al convertirse en el primer vehículo tripulado desarrollado por una empresa...

3... 2... 1... Liftoff of #Crew9, now soaring to the International @Space_Station. pic.twitter.com/gDRd1VVAV7— NASA (@NASA) September 28, 2024 Con el lanzamiento y llegada a la Estación Espacial Internacional de la Crew Dragon Freedom la tripulación de la Starliner ya tiene nave con...

La Agencia Espacial Europea (ESA) junto con la Agencia Aeroespacial Alemana (DLR por sus siglas en alemán) acaban de inaugurar el simulador de la superficie lunar LUNA. Aunque se refieren a ella como una instalación análoga lunar. Instalada en un edificio...

Welcome home!The Soyuz MS-25 spacecraft, with NASA astronaut Tracy C. Dyson and cosmonauts Nikolai Chub and Oleg Kononenko aboard, landed in Kazakhstan at 7:59am ET today. More… https://t.co/RYIAX6voqf pic.twitter.com/HCAewHyjik— International Space Station (@Space_Station) September 23, 2024 Hace unas horas la cápsula espacial...

Liftoff! pic.twitter.com/yG7YajyF2k— SpaceX (@SpaceX) September 17, 2024 Esta mañana un Falcon 9 de SpaceX ponía en órbita dos satélites más del sistema de navegación Galileo. Pero esta vez Europa lo reconoce, no como en la anterior ocasión en la que ninguna de...

Despegue del primer Ariane 6 – Agencia Espacial Europea La Agencia Espacial Europea (ESA) acaba de publicar una actualización acerca del primer lanzamiento de un Ariane 6 del pasado 9 de julio y que terminó con algunos objetivos sin cumplir. La buena...

Splashdown of Dragon confirmed! Welcome back to Earth, @rookisaacman, @kiddpoteet, @Gillis_SarahE, @annawmenon pic.twitter.com/nILpMQh2sR— SpaceX (@SpaceX) September 15, 2024 El amerizaje de la Crew Dragon Resilience hace unos minutos ha puesto fin a la misión Polaris Dawn, que ha cumplido con todos sus...

Commander @rookisaacman conducting suit mobility tests while Dragon flies between Australia and Antarctica pic.twitter.com/yj3vFOTNzQ— SpaceX (@SpaceX) September 12, 2024 [Anotación en actualización] Ha sido impresionante y emocionante. La misión Polaris Dawn ha llevado a cabo el primer paseo espacial privado de la...

.@NASA_astronauts Don Pettit (@Astro_Pettit) with his cosmonaut crewmembers, Alexey Ovchinin and Ivan Vagner, successfully launched on the Roscosmos Soyuz MS-26 spacecraft from Baikonur Cosmodrome in Kazakhstan today, Wednesday, Sept. 11 at 12:23pm ET. They are scheduled to dock… pic.twitter.com/IYDAxmQ404— NASA's Johnson Space...

Polaris Dawn and Dragon at 1,400 km above Earth – the farthest humans have traveled since the Apollo program over 50 years ago pic.twitter.com/rRDeD1dY1e— SpaceX (@SpaceX) September 11, 2024 Con un apogeo de 1.400,7 kilómetros en la órbita de su cápsula la...

Despegue de la misión – Polaris Program Apenas hace unos minutos acaba de ser lanzada Polaris Dawn, la primera misión con un paseo espacial privado de la historia. Todo estaba listo en la Plataforma de lanzamiento 39A del Centro Espacial Kennedy el...

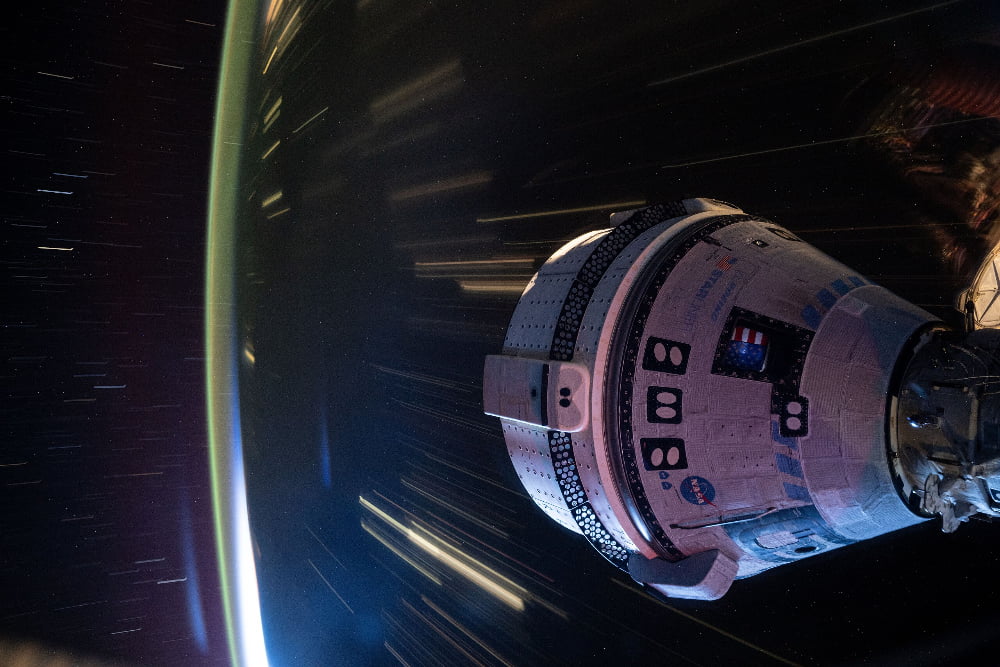
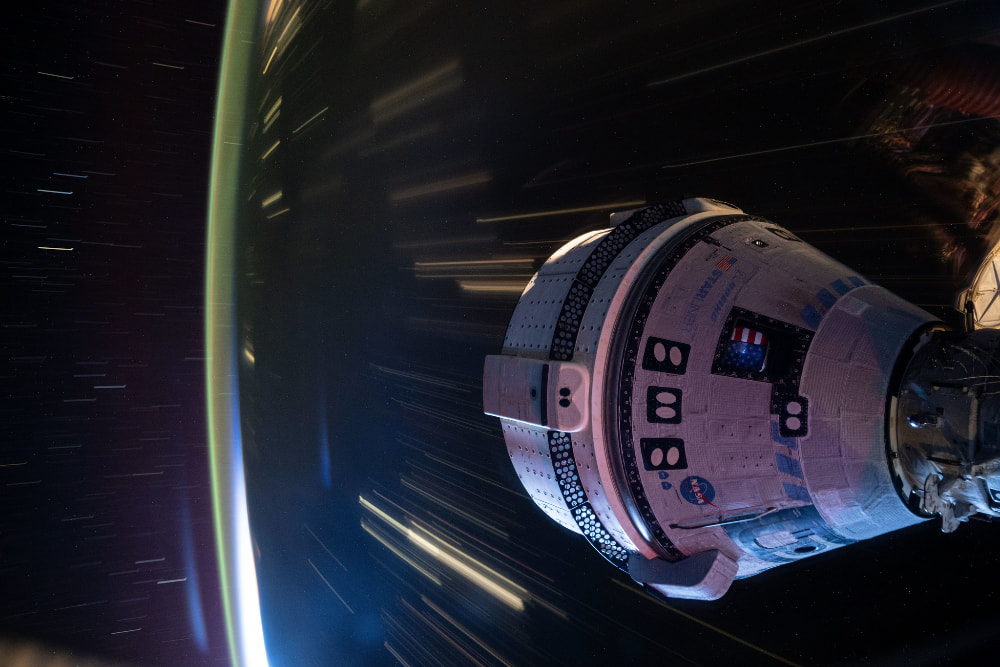
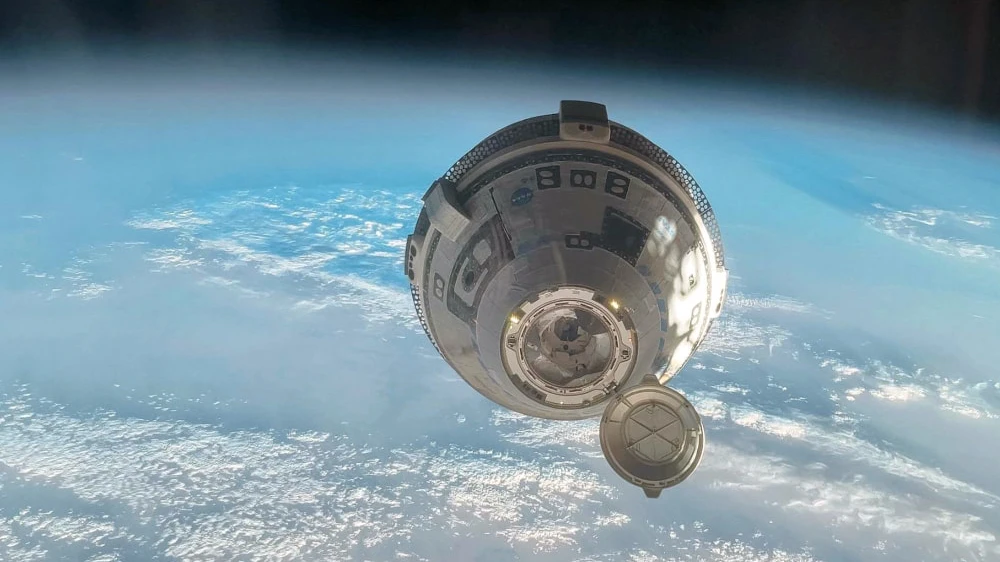
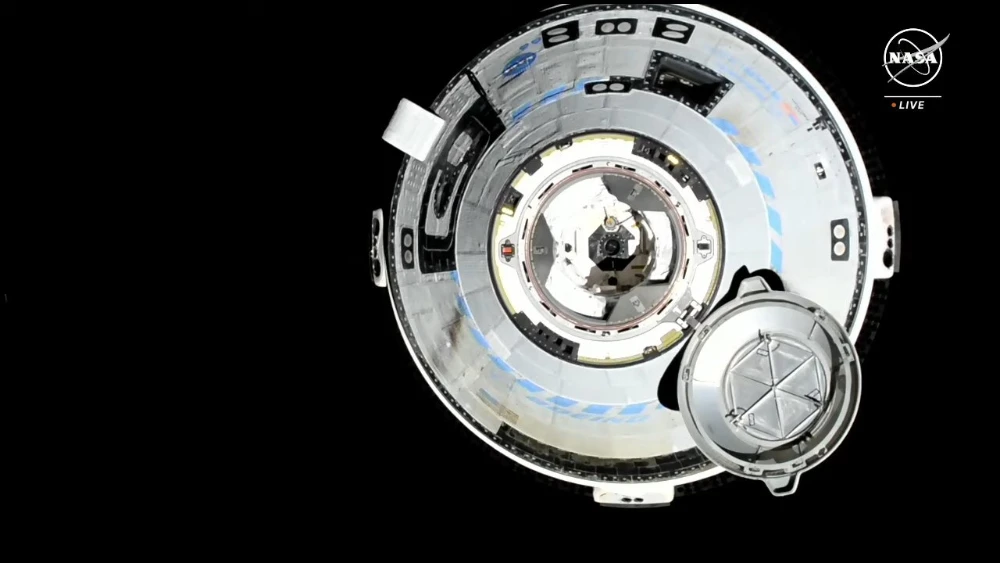
The #Starliner spacecraft is back on Earth.At 12:01am ET Sept. 7, @BoeingSpace’s uncrewed Starliner spacecraft landed in White Sands Space Harbor, New Mexico. pic.twitter.com/vTYvgPONVc— NASA Commercial Crew (@Commercial_Crew) September 7, 2024 [Anotación en actualización] A primera hora de esta mañana la Starliner...
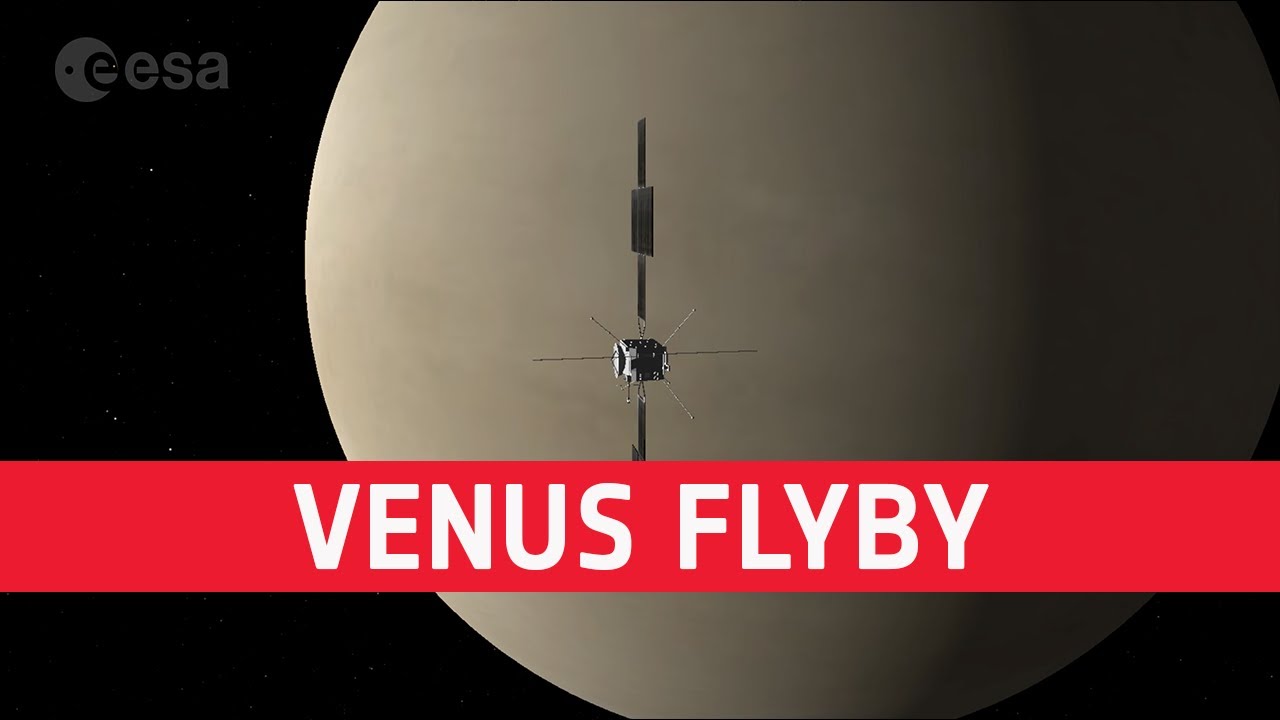
Impresión artística de BepiColombo durante uno de sus sobrevuelos de Mercurio – ESA/JAXA A mediados de mayo la Agencia Espacial Europea (ESA) anunciaba que la sonda BepiColombo tenía problemas con su sistema de propulsión que impedían que sus propulsores funcionaran con la...

“We have a mission!” declares ESA Flight Operations Director, Franco Marchese.#Sentinel2 C’s solar array has deployed: the satellite is in good health and generating power. pic.twitter.com/jKopBDx1Ds— ESA Operations (@esaoperations) September 5, 2024 Tras un retraso de 24 horas a causa de un...

La tripulación Crew-9 original. De izquierda a derecha Aleksandr Gorbunov, Nick Hague, Zena Cardman y Stephanie Wilson – SpaceX Ya es oficial: la NASA ha escogido a Nick Hague y al cosmonauta Aleksandr Gorbunov para llevar la Crew Dragon Freedom a la...

3, 2, 1 and liftoff of Falcon 9 from pad 40 in Florida! pic.twitter.com/t9GJK01E5o— SpaceX (@SpaceX) August 31, 2024 El pasado día 29 cuando publicaba que los Falcon 9 –y por tanto los Falcon Heavy– quedaban en tierra tras el fallo del...

An epic journey. #NS26 pic.twitter.com/FzQeMuQNB6— Blue Origin (@blueorigin) August 30, 2024 Hace apenas un par de horas Blue Origin lanzaba seis personas más al espacio durante el breve vuelo suborbital de 10 minutos y ocho segundos de la misión NS-26. La altitud...

El Falcon 9 de la misión Polaris Dawn en la plataforma de lanzamiento a la espera de que le dejen volar – SpaceX No lo vimos venir pero tras el fallo del aterrizaje de la primera etapa B1062 de un Falcon 9...

RIP booster pic.twitter.com/jmlt1VoKb8— Empress Heavy (@HeavyMetalShip) August 28, 2024 Esta mañana un Falcon 9 de SpaceX despegaba desde el Complejo de lanzamiento 40 de Cabo Cañaveral con 21 satélites Starlink a bordo. El lanzamiento fue un éxito en el sentido de que...

SLIM fotografiado haciendo el pino por el rover LEV-2, cuyas ruedas se ven en primer plano a ambos lados de la parte inferior de la imagen – JAXA Después de que hayan fallado todos los intentos por ponerse en contacto con él...
La Starliner acoplada a la Estación Espacial Internacional – NASA [Anotación en actualización] En el día 80 de una misión que iba a durar ocho días por fin la NASA ha confirmado que ha decidido traer de vuelta la Starliner de Boeing...

Bye-bye ESM-3! The Airbus-built ESM-3, that will bring boots back on the Moon, left the Airbus facilities in Bremen to head to its launch site in Cape Canaveral.The European Service Module (ESM) will travel aboard the ship Canopée and arrive in Florida...
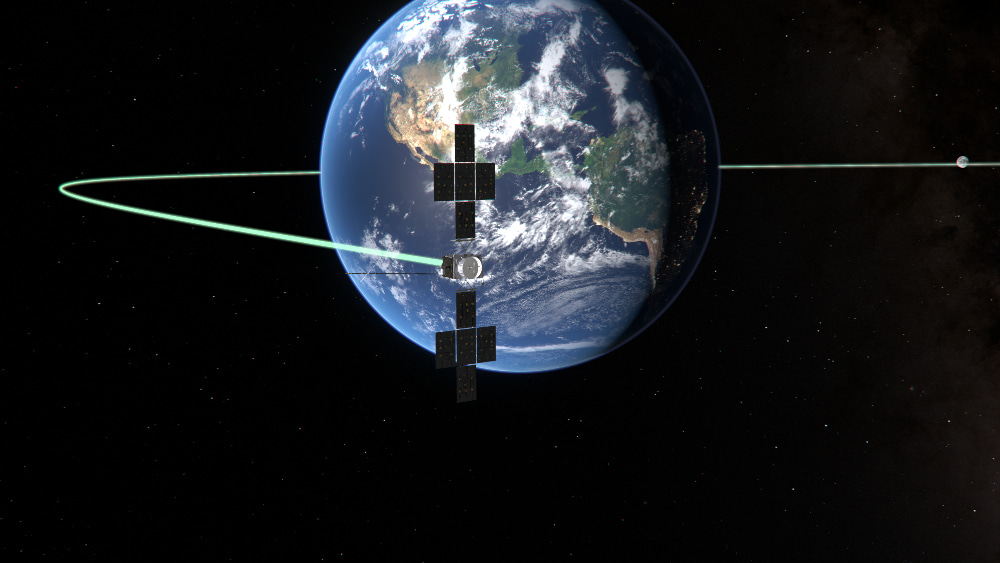
Timelapse! Volume up, sit back and enjoy #ESAJuice's lunar-Earth flyby in all its glory pic.twitter.com/3aPGl3JQG0— ESA's Juice mission (@ESA_JUICE) August 27, 2024 Ya tenemos confirmación de que el sobrevuelo de la Luna y la Tierra por parte de la sonda JUICE de...

Finally, after several attempts at improving it further : Video views of @ESA_JUICE's moon flyby as seen from the two JMC cameras & NAVCAM, all from the data received in Bochum @amsatdl !This time in color, making it even nicer :-) pic.twitter.com/KOmfM1PSzg—...
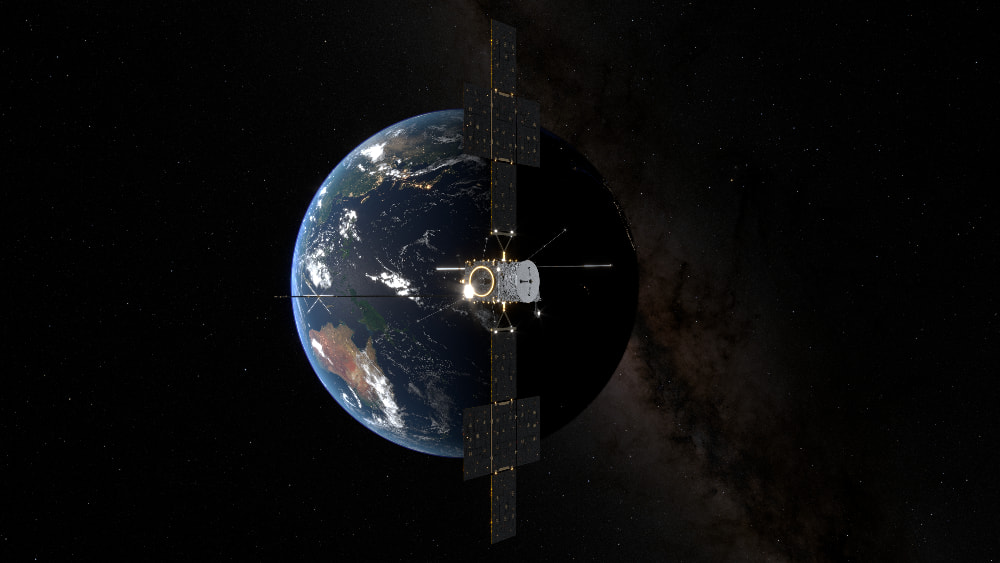
Impresión artística de JUICE sobrevolando la Tierra – ESA Las próximas horas son cruciales para la misión JUICE de la Agencia Espacial Europea (ESA) porque va a ejecutar un sobrevuelo de la Luna y la Tierra que le ayudará a modificar su...
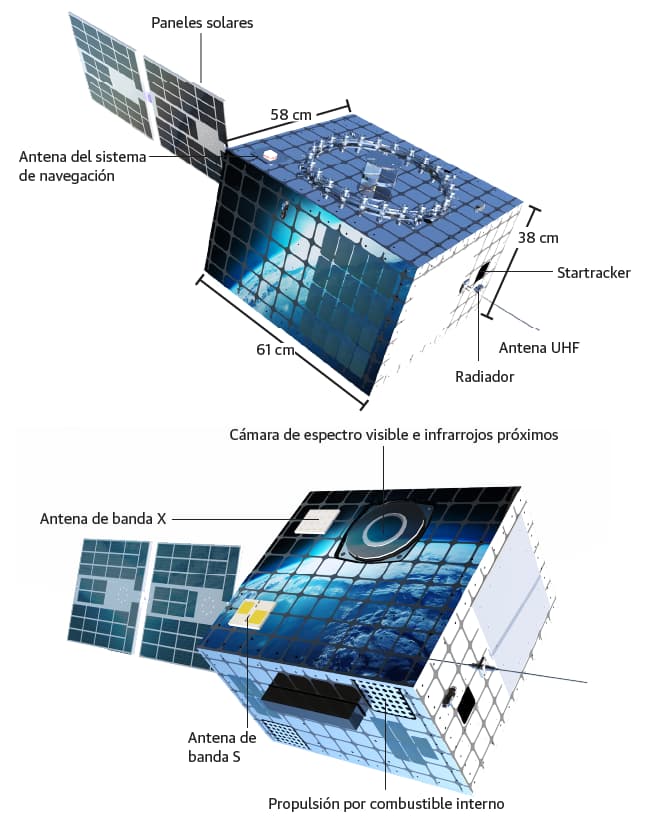
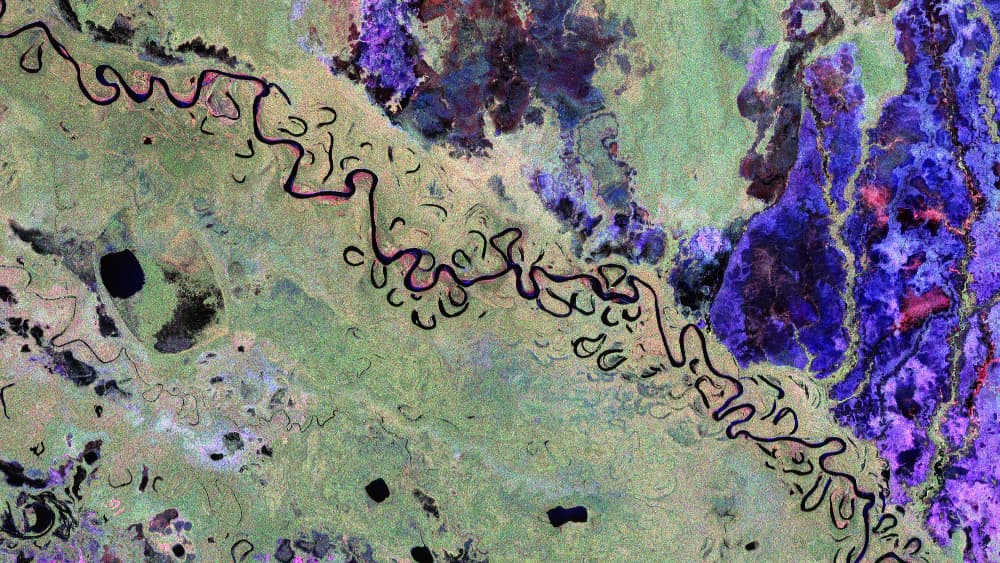
LUR-1 y su equipo – AVS Una de las cargas útiles de la misión Transporter 11 de SpaceX era el satélite de observación terrestre LUR-1. Diseñado y construido por la empresa AVS (Added Value Solutions, Soluciones de valor añadido), es el primer...

Tal y como estaba previsto esta mañana llegaba a la Estación Espacial Internacional (EEI) la cápsula de carga Progress MS-28. Atracó de forma automática en el puerto trasero del módulo Zvezda. Lleva a bordo 2.621 kg de carga. Se reparten entre...

Hace unas horas un Falcon 9 de SpaceX lanzaba con éxito la misión Transporter 11 de la empresa. Con ella colocaron en órbita sincrónica al Sol (SSO) de 500 kilómetros de altitud 116 satélites de empresas e instituciones de todo el...

The Progress 89 cargo craft is safely in orbit following a successful launch at 11:20pm ET today. Progress, packed with nearly three tons of food, fuel, and supplies, will dock to the space station’s Zvezda module at 1:56am Saturday, Aug. 17. More......

La Starliner atracada en la EEI – NASA Una semana más, otra semana en la que la NASA sigue sin tomar una decisión acerca de la Starliner más allá de haber retrasado el lanzamiento de la tripulación Crew-9. Así que aún no...
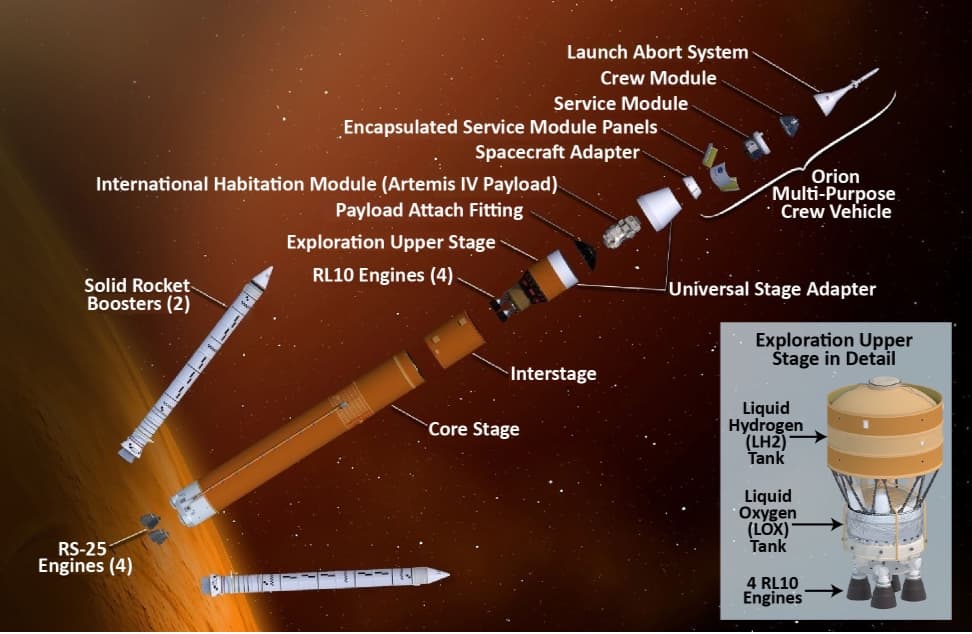
El SLS 1B y sus componentes – NASA La semana pasada la Oficina del interventor general, Office of Inspector General (OIG) de la NASA publicó un informe bastante mordaz obre el estado de la versión 1B del SLS, el Space Launch System,...
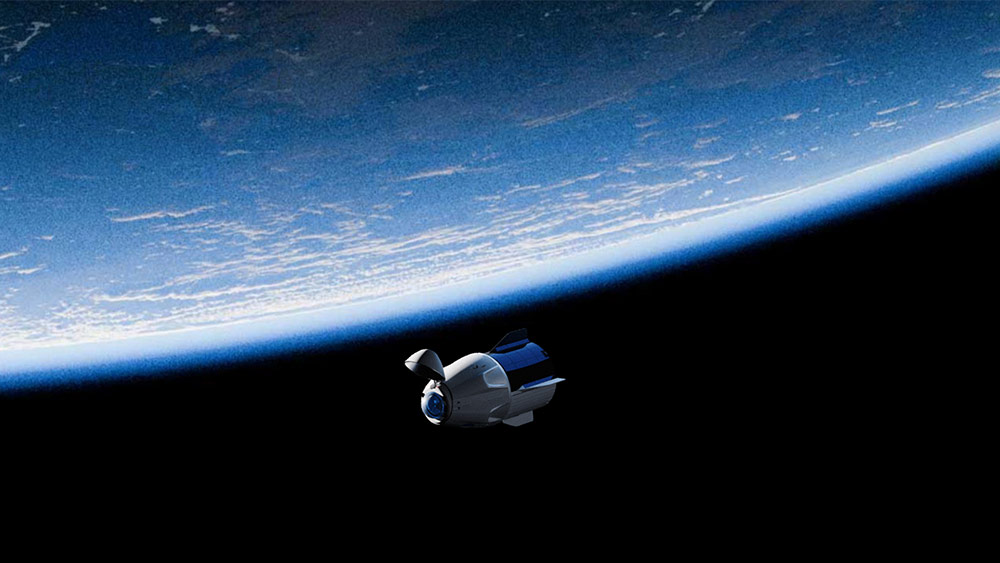
Impresión artística de la Endurance en el espacio durante la misión – Fram2 SpaceX acaba de anunciar la primera misión espacial tripulada que sobrevolará los polos de la Tierra. Ha sido bautizada Fram2 en honor al Fram, el un barco que fue...

Hace apenas unos minutos la cápsula de carga Progress MS-26 ha terminado su misión con una reentrada controlada en la atmósfera sobre el Pacífico. La cápsula iba cargada con materiales de desecho y ya no necesarios a bordo de la Estación...

Una vez más llegan los días de observación de las Perseidas, que comenzaron a mediados de julio y ahora en agosto tendrán su máximo los días 12 y 13 de agosto, es decir las noches del próximo domingo, lunes y martes....
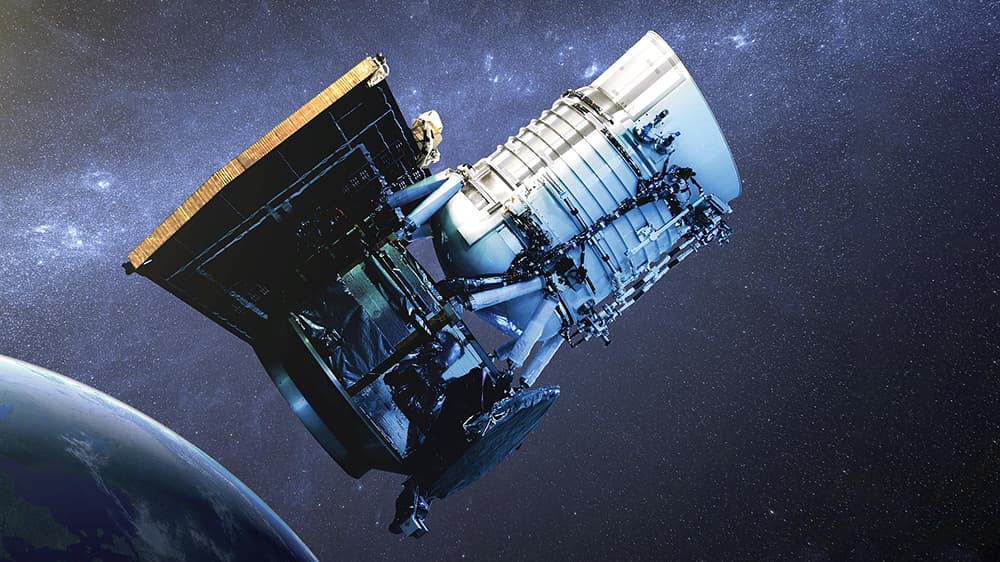
Impresión artística de NEOWISE en órbita – NASA/JPL-Caltech Esta pasada noche la NASA ha enviado el comando para que apagara sus radios, lo que significa el final de la misión del telescopio espacial NEOWISE. Reentrará en la atmósfera en los próximos meses,...

En este vídeo el aficionado a la música Hainbach enseña lo que es el rebote lunar, una especie de eco que se considera una forma de comunicaciones Tierra-Luna-Tierra y utilizan a veces los radioaficionados para comunicarse. Es algo que se conoce...

Despegue de la misión – SSST Un cohete Larga Marcha 6A ha puesto en órbita los 18 primeros satélites de la constelación china de acceso a Internet G60. G60 Starlink, que es como se la conocía al principio, de hecho. Así que...

La NASA ha anunciado hace unas horas que retrasa el lanzamiento de la tripulación Crew 9 a la Estación Espacial Internacional (EEI) del 18 de agosto a no antes del 24 de septiembre. La NASA también retrasará el lanzamiento de la cápsula...

Hoy hace diez años que la misión Rosetta de la Agencia Espacial Europea (ESA) entró en órbita alrededor del cometa 67P. Para ser exactos del cometa 67P/Churyumov-Gerasimenko. A falta de un Apolo XI yo la he comparado en muchas ocasiones con...
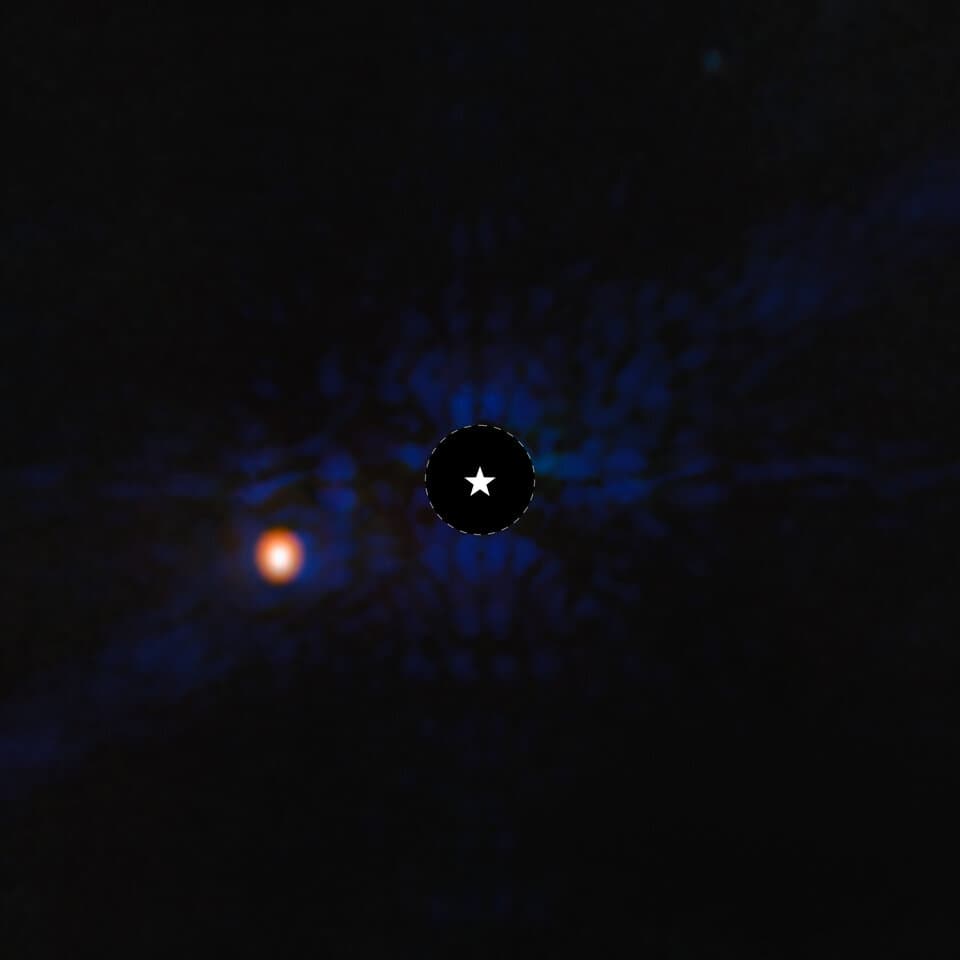
Epsilon Indi Ab visto por el instrumento MIRI – ESA/Webb, NASA, CSA, STScI, E. Matthews (Max Planck Institute for Astronomy) Hace unos días la ESA y la NASA presentaban la primera imagen de un planeta extrasolar conseguida por el Telescopio espacial James...

La SS Francis R. Scobee ya atracada en la EEI – NASA TV Esta mañana a las 9:11, hora peninsular Española (UTC +2), el astronauta de la NASA Matthew Dominick capturaba la cápsula de carga Cygnus NG 21 con el brazo robot...

La Calypso vista a través de una de las ventanillas de la Crew Dragon Endeavour – NASA Después de la prueba de encendido de los motores de la Starliner Calypso en la Estación Espacial Internacional (EEI) el pasado 27 de julio se...

De izquierda a derecha Peggy Whitson, Shubhansku Shukla, Sławosz Uznański y Tibor Kapu – Axiom Space Pues ya está confirmado: el astronauta polaco de la Agencia Espacial Europea (ESA) ESA Sławosz Uznański volará a la Estación Espacial Internacional (EEI) en la cuarta...
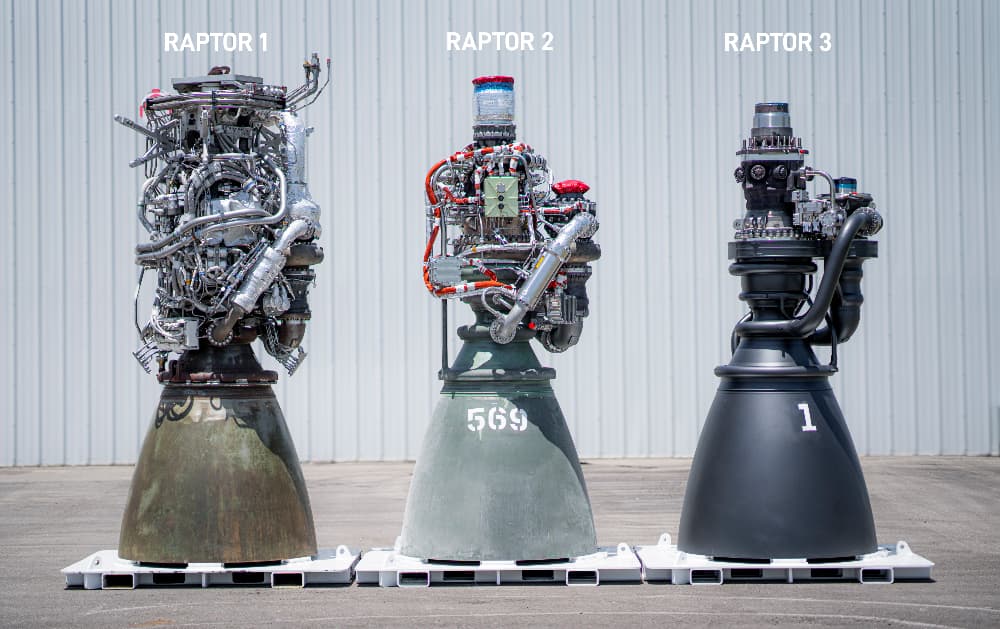
La evolución del Raptor en una imagen – SpaceX Este fin de semana SpaceX ha mostrado una foto del que se supone que es el primer motor Raptor 3 de producción. Lo ha hecho mostrándolo al lado de los Raptor 1 y...
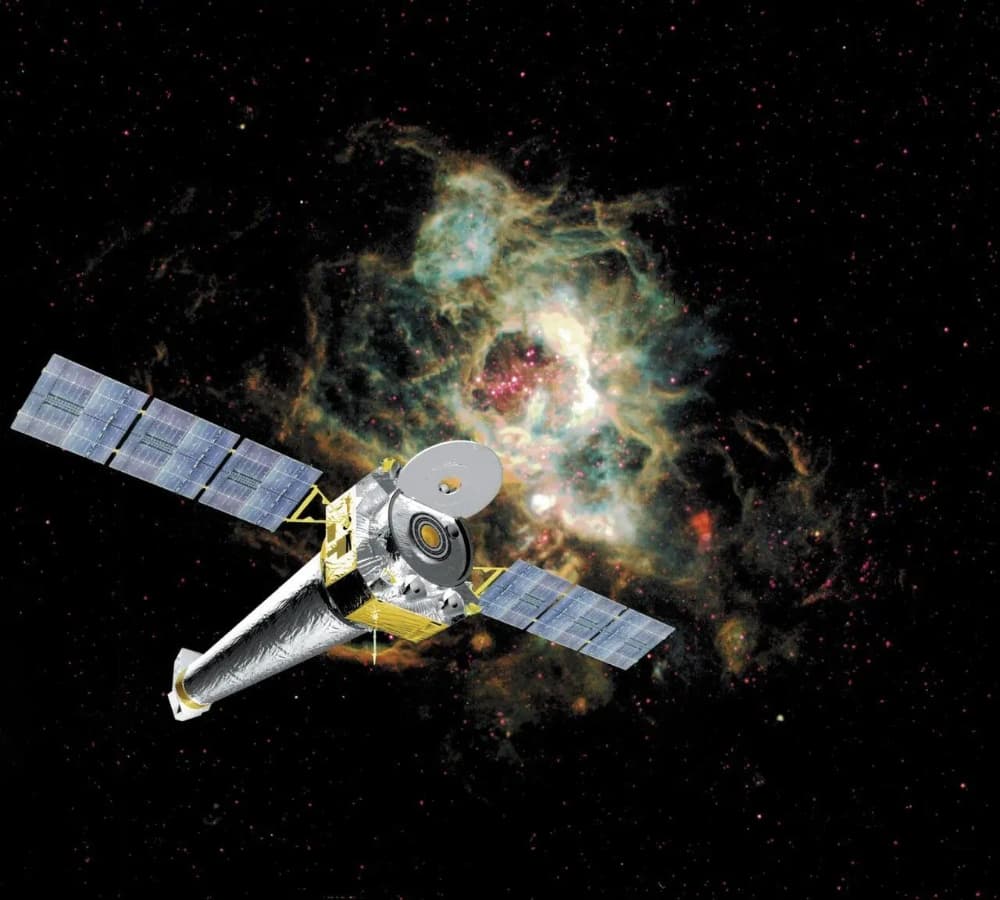
Impresión artística de Chandra en el espacio – NASA/SAO/CXC Se me había pasado pero el pasado 23 de julio se cumplieron 25 años de la puesta en órbita del observatorio espacial de rayos X Chandra por parte del transbordador espacial Columbia para...

Liftoff of Falcon 9 and Cygnus! pic.twitter.com/zLq45t41pw— SpaceX (@SpaceX) August 4, 2024 Esta tarde un Falcon 9 de SpaceX ha lanzado la cápsula de carga Cygnus NG 21 en su viaje hacia la Estación Espacial Internacional (EEI). Es la segunda Cygnus lanzada...

A call to all #space & @LEGO_Group fans out here: votes are still open to make a #Lego model of #Ariane6! Cast your vote here (or scan QR code in the video) to make this happen ! https://t.co/SsPIdDBQWq@RocketLego #Arianespace #LegoCreations #DestinationSpace pic.twitter.com/T0ASQBo1w3—...

El primer Ariane 6 en volar se eleva sobre la plataforma de lanzamiento – ESA La Agencia Espacial Europea (ESA) acaba de publicar su primera actualización sobre el lanzamiento del primer Ariane 6 desde el día 9, el día del lanzamiento. En...
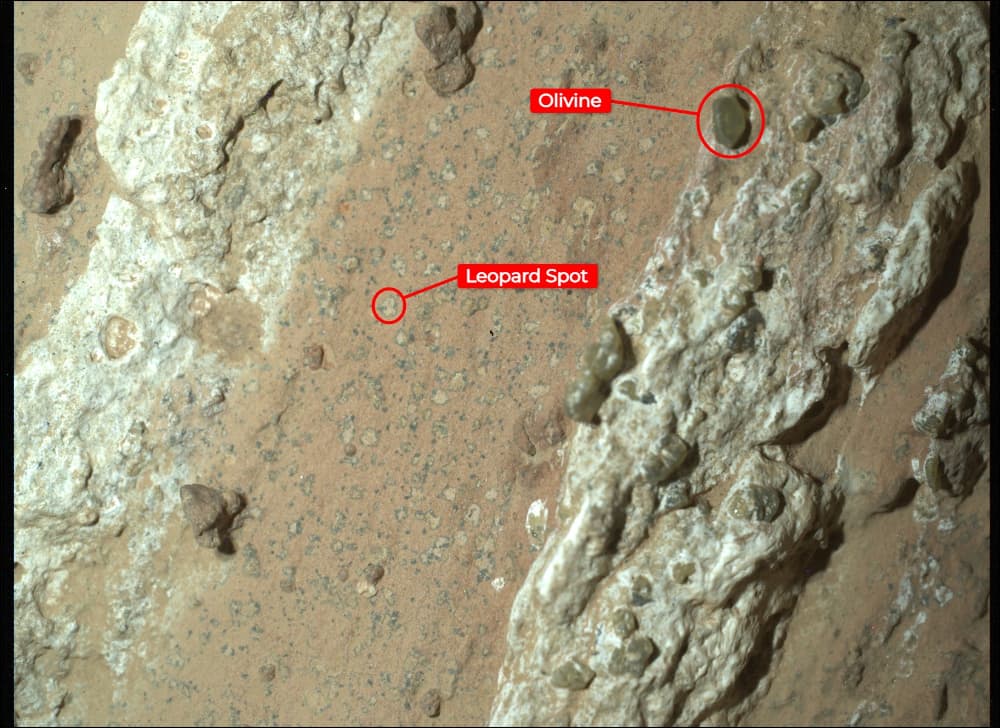
Las manchas de leopardo y vetas de olivino en Chevaya Falls – NASA/JPL-Caltech/MSSS Hace unos días el Laboratorio de Propulsión a Chorro de la NASA publicaba una nota en la que informaba de que Perseverance ha encontrado una roca que muestra algunos...
La Starliner Calypso en la Estación Espacial Internacional a la espera de que se decida su destino – NASA Tras la más reciente actualización sobre el asunto ahora sabemos que la NASA ya cuenta con que la Starliner de Boeing no entrará...

Svetlana Savítskaya en el exterior de la Salyut 7 – Roscosmos Estos días se han cumplido 40 años del paseo espacial de Svetlana Savítskaya, el primero llevado a cabo por una mujer en la historia de la investigación espacial. En concreto fue...

Falcon 9 lifts off from pad 39A in Florida! pic.twitter.com/ozYLYUxCss— SpaceX (@SpaceX) July 27, 2024 Esta mañana un Falcon 9 despegaba desde el Complejo de lanzamiento 39A del Centro Espacial Kennedy en lo que marca la vuelta al servicio del cohete desde...

La NASA y SpaceX han dado más detalles acerca del USDV, el U.S. Deorbit Vehicle, Vehículo para desorbitado de los Estados Unidos, la nave espacial que la empresa va a construir para terminar con la Estación Espacial Internacional (EEI) al final...
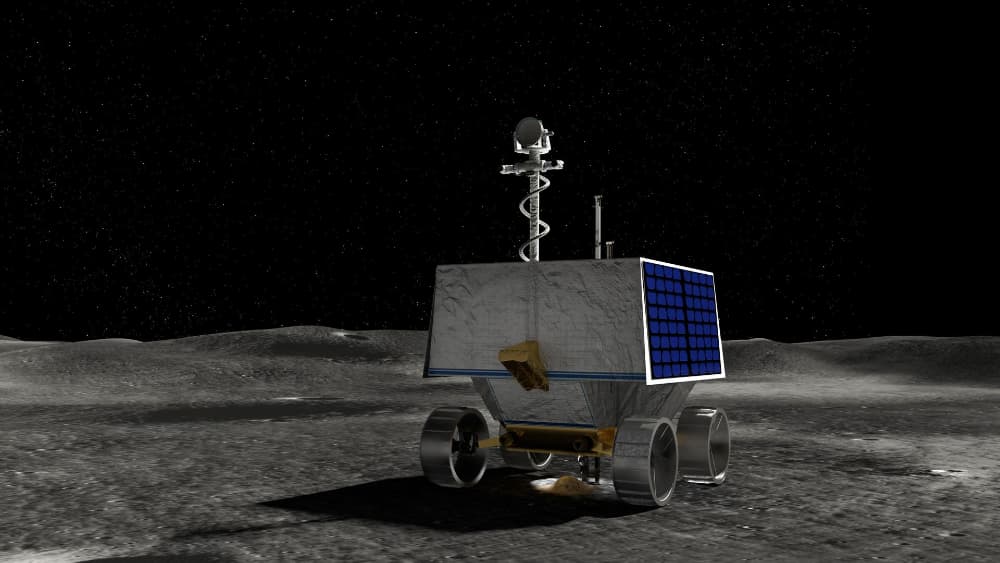
Impresión artística de VIPER sobre la superficie de la Luna – Centro de Investigación Ames En un anuncio que ha pillado a casi todo el mundo por sorpresa la NASA ha comunicado que cancela el rover VIPER después de haberse dejado unos...
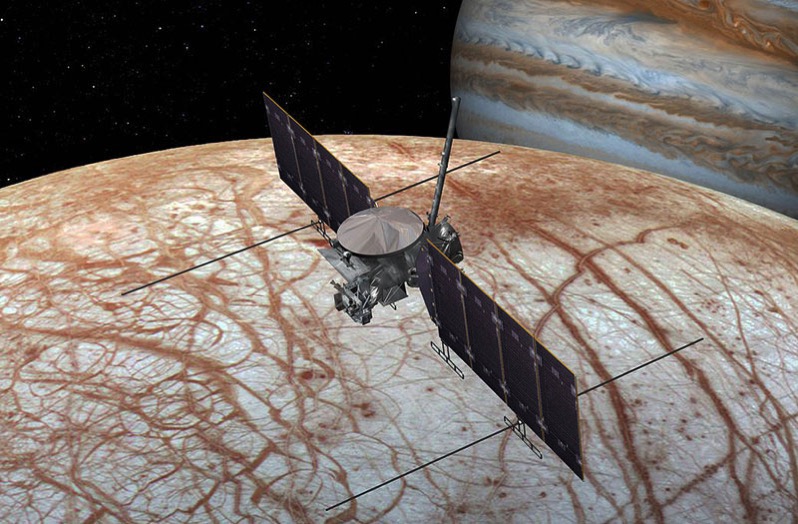
Europa Clipper con el satélite que le da nombre y Júpiter al fondo – NASA/JPL-Caltech La NASA estaba preparando todo para el lanzamiento de la sonda Europa Clipper rumbo a la luna del mismo nombre de Júpiter el próximo mes de octubre....
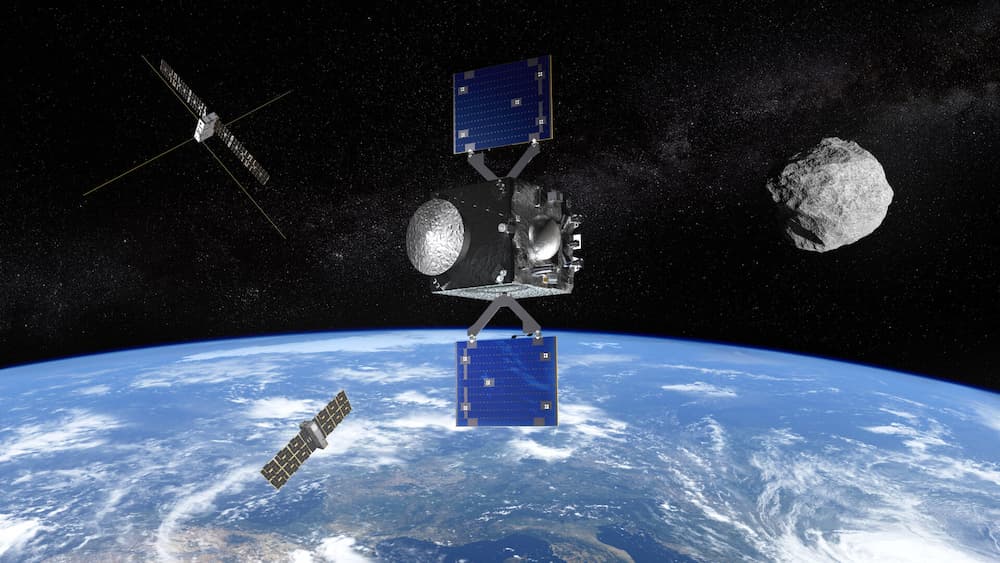
Impresión artística de RAMSES y Apofis pasando por las proximidades de la Tierra – ESA-Science Office No tenía en mi radar la misión RAMSES de la Agencia Espacial Europea (ESA) pero hoy mismo el Programa de seguridad de la agencia ha recibido...

.@northropgrumman’s Cygnus space freighter was released from the Canadarm2 robotic arm at 7:01am ET today, ending its five-and-a-half month stay at the orbiting laboratory. More… https://t.co/F55tLmJiXr pic.twitter.com/fge7xHiav6— International Space Station (@Space_Station) July 12, 2024 Tras dejar la Estación Espacial Internacional (EEI) poco...

Watch Falcon 9 launch 20 @Starlink satellites to orbit from California, including 13 with Direct to Cell capabilities https://t.co/aXuY7ZXXrO— SpaceX (@SpaceX) July 12, 2024 Hace unas horas un Falcon 9 de SpaceX despegaba de Complejo de lanzamiento espacial 4E de la Base...

5,4,3,2,1 allumage Vulcain!Relive the moment the first Ariane 6 launched from @EuropeSpacePort, French Guiana Turn the sound all the way UP #GoAriane! pic.twitter.com/WYRpPLGtnn— European Space Agency (@esa) July 9, 2024 A las 21:00, hora peninsular española (UTC +2) el primer Ariane 6...

1⃣Countdown to liftoff!1 day to #Ariane6 launch.There's only one first launch. Join us tomorrow on #ESAWebTV half an hour before lift-offhttps://t.co/xj3UixJdrE9 July 202419:00–23:00 BST/20:00–00:00 CEST(Local time 15:00-19:00 GFT) pic.twitter.com/SI4SnA68kT— ESA Space Transport (@ESA_transport) July 8, 2024 Este pasado fin de semana todas...
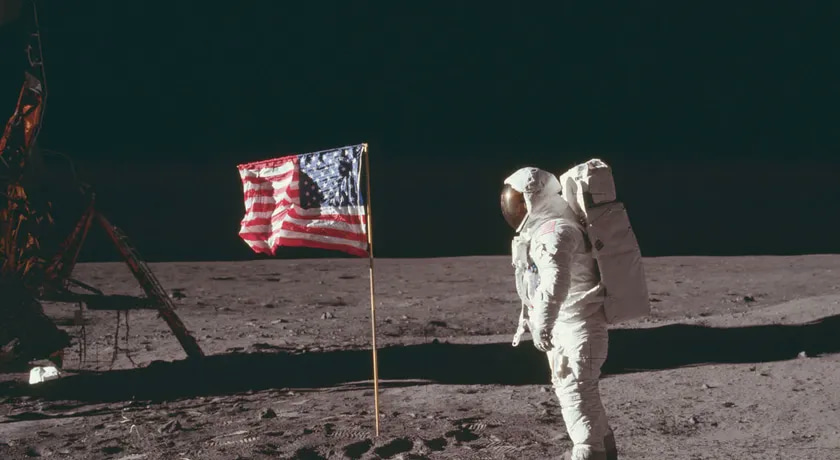
Los rusos han admitido tras de cinco décadas que es cierto que los estadounidenses llegaron con sus astronautas a la Luna, algo que al parecer todavía no habían admitido abiertamente desde las altas instancias. Debido a la guerra fría y a...

Impresión artística de una segunda etapa de un Miura 5 con las cofia protectora recién abierta – PLS Space ¿Tienes una idea apabullante para enviar un proyecto científico o tecnológico al espacio pero no tienes el dinero para hacerlo? Pues PLD ofrece...

Hace unos días la Agencia Japonesa de Exploración Aeroespacial (JAXA) llevaba a cabo con éxito el segundo lanzamiento con éxito del cohete H3. Su carga útil era el satélite de observación terrestre ALOS 4, destinado a sustituir al ALOS 3 que...
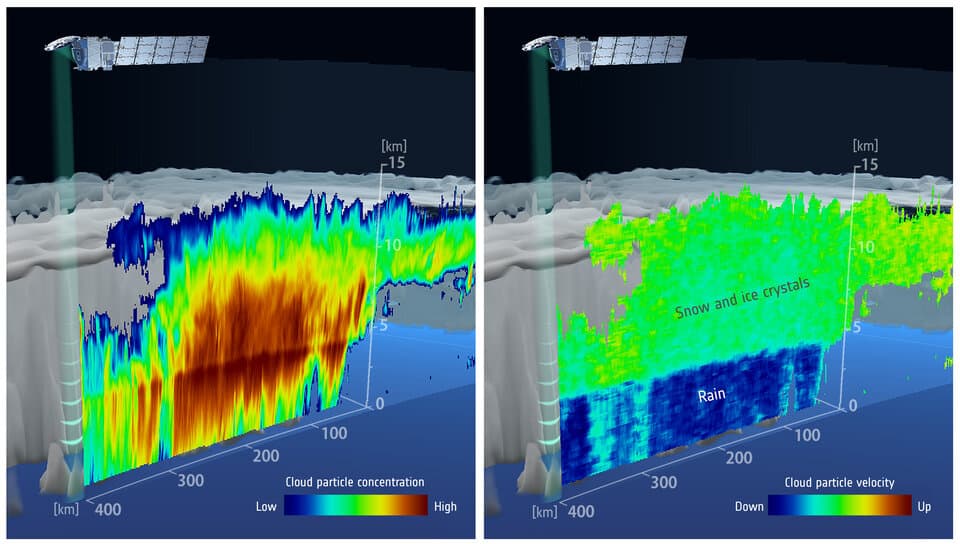
Primera imagen del radar de perfilado de nubes del satélite EarthCARE – JAXA/NICT/ESA Menos de un mes después de su lanzamiento el satélite medioambiental EarthCARE ha enviado ya su primera imagen. En concreto se trata de una del interior de una nube...

Después de la prueba de carga de propelentes (WDR) del Ariane 6 del pasado día 20 la Agencia Especial Europea (ESA) dijo que todo parecía haber ido bien. Pero que necesitarían como una semana para terminar de analizar todos los datos...

La empresa china Space Pioneer llevó ayer a cabo un encendido estático de la primera etapa de su cohete Tianlong-3. Pero la pieza que sujetaba el cohete a la plataforma de lanzamiento falló y este salió disparado hacia arriba. En cuanto...

La Starliner vista desde la Cúpula – NASA En una rueda de prensa celebrada este pasado viernes responsables de Boeing y la NASA dijeron que aún no están listos para fijar la fecha de la vuelta a tierra de la Starliner. Pero...

Lanzamiento del Meteosat MTG-S1 en diciembre de 2022 – Arianespace Aunque por lo visto llevaban meses dándole vueltas no deja de ser sorprendente que a menos de dos semanas del primer lanzamiento de un Ariane 6 la junta directiva de la agencia...

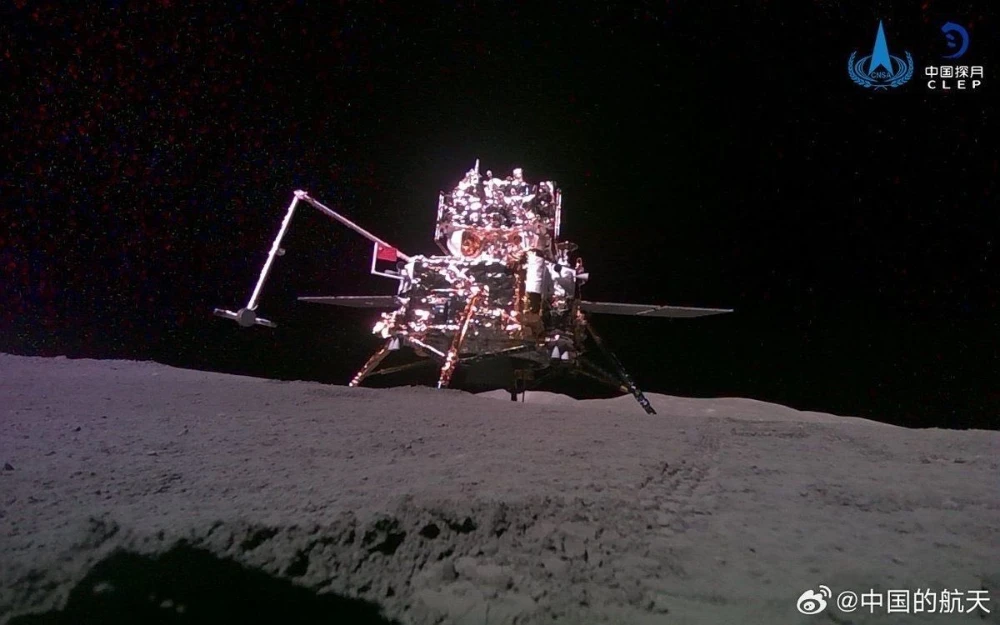
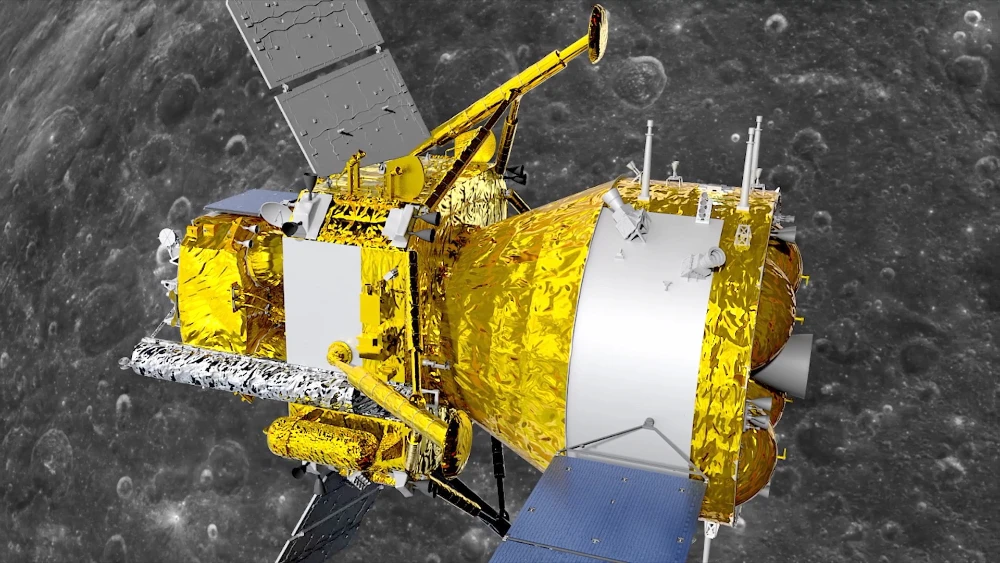
La cápsula de muestras antes de ser abierta – CNSA Nos quedaba por saber el dato de cuánto pesaban las muestras que la misión china Chang'e ha traído del lado oculto de la Luna. Pero ya lo tenemos: han sido dos kilos...

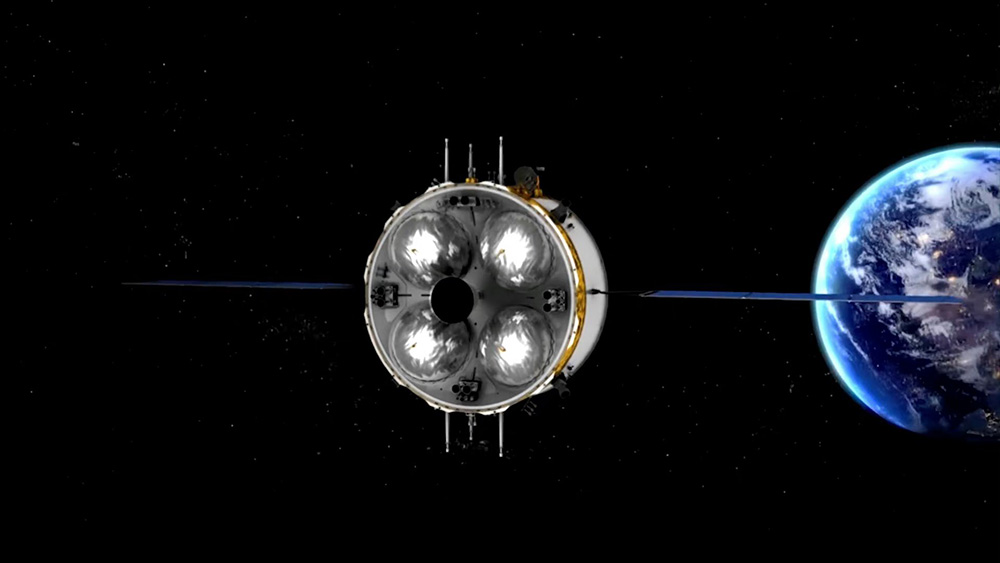
En un anuncio sorpresa porque no era público que el proceso de selección estaba en marcha la NASA ha anunciado que ha otorgado a SpaceX el contrato para el diseño y construcción del U.S. Deorbit Vehicle, Vehículo para desorbitado de los...

Falcon 9 lands on the Just Read the Instructions droneship, completing the first 22nd launch and landing of a booster! pic.twitter.com/8WX1mE4QbH— SpaceX (@SpaceX) June 27, 2024 Sí, el título de la anotación es prácticamente repetido de la anterior sobre este tema. Pero...

En junio de 2022 la NASA anunció que había contratado el diseño y desarrollo de sus nuevos trajes espaciales a Axiom Space y a Collins Aerospace. Pero ahora Collins Aerospace se ha retirado del proyecto. Según la misma empresa reconoce van con...

Deployment of @NOAA’s GOES-U satellite confirmed pic.twitter.com/Q5CDr6FSaL— SpaceX (@SpaceX) June 26, 2024 Esta pasada noche despegaba el décimo Falcon Heavy, el primero de 2024, que puso en órbita con éxito el satélite meteorológico GOES-U de la Oficina Nacional de Administración Oceánica y...
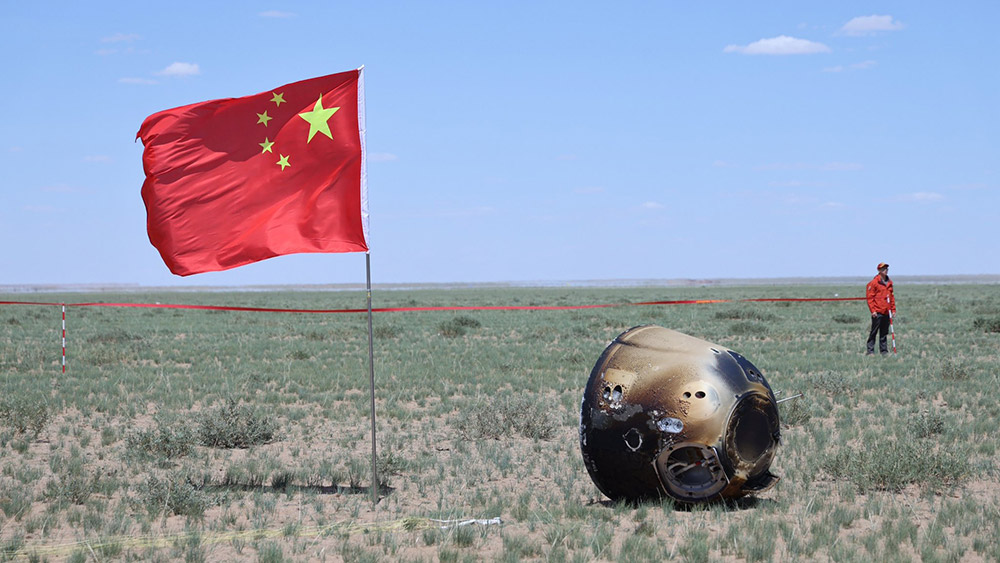
Hace unos minutos la cápsula con muestras del lado oculto de la Luna de la misión china Chang'e 6 aterrizaba sin problemas en la zona designada de la provincia de Sichuan, poniendo fin con éxito a la misión, que en total...
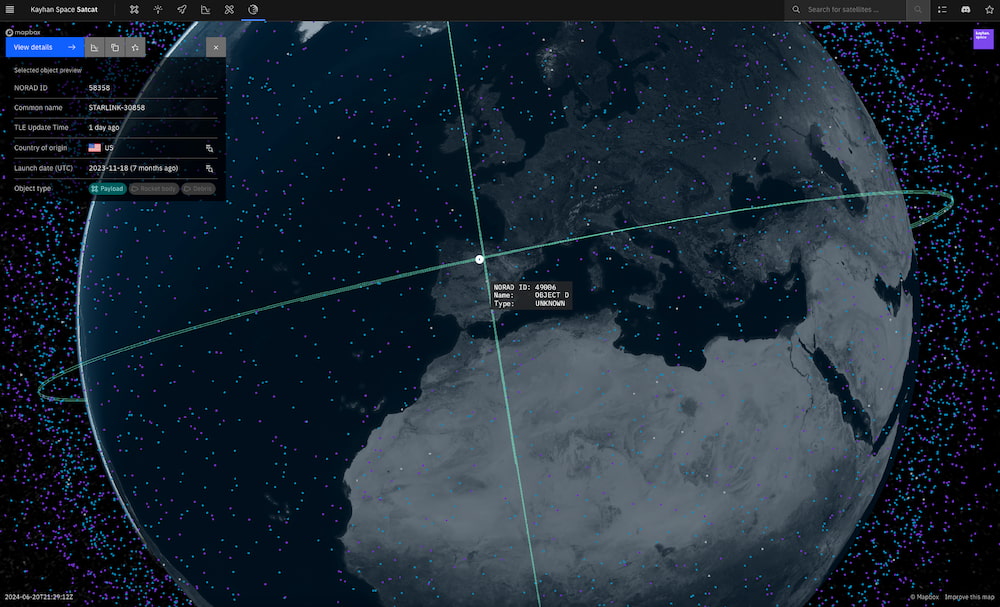
Me topé con Satcat, de Kayhan Space, un completísimo y precioso recurso informativo acerca de las decenas de miles de objetos que están en órbita de la Tierra. En total contiene información sobre más de 29.700 satélites, 15.000 «restos» espaciales, la...
Impresión artística del Miura 5 en su plataforma de lanzamiento en Kourou – PLD Space PLD Space acaba de anunciar que invertirá 10 millones de euros en su base de lanzamiento en del espaciopuerto de Kourou. Desde ella lanzará el Miura 5,...

El RLV-TD, también conocido como Pushpak, que es el demostrador del futuro transbordador espacial de la India, acaba de hacer sin problemas su tercer y último aterrizaje. Como siempre el vuelo, bautizado como RLV LEX-03, aumentaba el nivel de dificultad respecto...
Impresión artística de la sonda camino de vuelta – CNSA No ha habido ninguna confirmación oficial al respecto pero observaciones de radio y mediante telescopios por parte de aficionados han confirmado que la sonda china Chang'e 6 ya viene rumbo a la...

La Starliner atracada en la EEI con Egipto al fondo – NASA Boeing y la NASA acaban de anunciar que, una vez más, retrasan la vuelta a tierra de la cápsula tripulada Starliner. En lugar de el 26 de junio, que era...
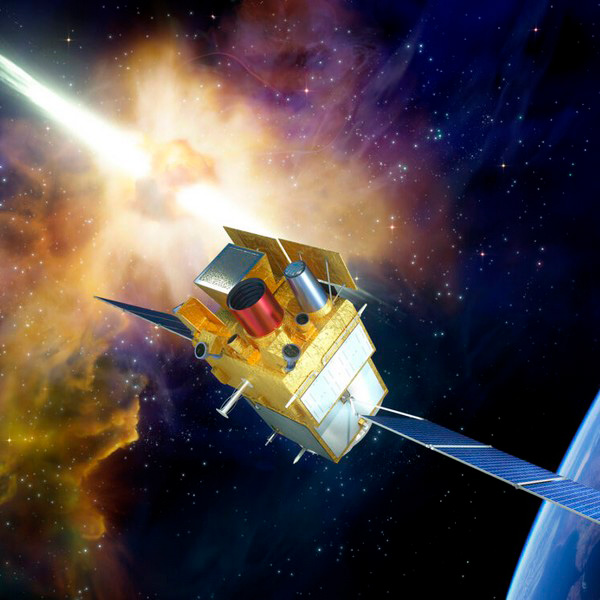
Esta mañana a las 9:00, hora peninsular española (UTC +2) un cohete Larga Marcha 2C despegaba del cosmódromo de Sichang para poner en órbita el observatorio franco-chino de explosiones de rayos gamma SVOM. Lo dejó en una órbita circular de 625...
El primer Ariane 6 en la plataforma de lanzamiento – ESA/CNES/ArianeSpace/Ariane Group/Optique Vidéo du CSG - R. Prigent Con un par de días de retraso sobre la fecha prevista ayer se llevó a cabo la prueba de carga de propelentes del primer...

Hace unos minutos Rocket Lab ha hecho el lanzamiento número 50 de su cohete Electrón. En esta ocasión la carga útil eran cinco satélites que ofrecen conectividad IoT (Internet de las cosas) de la empresa francesa Kinéis que tiene como objetivo...
La Starliner atracada en la EEI con Egipto al fondo – NASA Boeing y la NASA acaban de dar una rueda de prensa en la que han anunciado que de nuevo se pospone el regreso de la Starliner. Queda ahora programado para...
La Starliner vista desde la Cúpula – NASA Hace un par de días Boeing y la NASA anunciaban que posponían la vuelta a casa de la Starliner del día 14 al 18 para que no ocurriera justo un día después de un...
Impresión artística de la Voyager 1 en el espacio – NASA/JPL El pasado mes de noviembre un fallo en un chip de memoria dejó a la Voyager 1 incapaz de enviar datos ni telemetría a la Tierra. Pero desde hace unos días...
La Starliner a su llegada a la Estación Espacial Internacional – Oleg Kononenko/Roscosmos Cuando la Starliner Calypso despegó el pasado día 5 en su primera misión tripulada había una fuga de helio localizada en su sistema de propulsión. Parecía un problema aislado...

Ed Stone con un modelo de las Voyager en 2022, año de su jubilación. De Stone, no de las sondas, que siguen a lo suyo dándolo todo – JPL Acaba de hacerse pública la noticia de la muerte de Ed Stone, quien...

China acaba de anunciar la selección de diez personas para su cuarto grupo de candidatos a astronauta. O taikonautas, que aunque es un «palabro» inventado cada vez va ganando más popularidad. Y va a haber que rendirse a la evidencia. No...

Always look up #Galactic07 pic.twitter.com/S5mmu14I2z— Virgin Galactic (@virgingalactic) June 9, 2024 Hace unos minutos el avión cohete VSS Unity de Virgin Galactic aterrizaba tras su séptimo y último vuelo comercial «al espacio.» Al espacio va entrecomillado porque la altitud máxima alcanzada ha...

La tierra vista desde la Luna fotografiada por Bill Anders – NASA Fuimos a explorar la Luna y descubrimos la Tierra.– Bill Anders Hace unas horas ha muerto William «Bill» Anders, uno de los miembros de la tripulación del Apolo 8 y...
Alguien se preguntó: ¿Cuántos fotones tiene que emitir la sonda Voyager 1 para que se reciba 1 bit de información de sus señales en la Tierra? Y se puso a hacer cálculos junto con las comunidades de la sección de Física...
Docking confirmed!@BoeingSpace's #Starliner docked to the forward-facing port of the @Space_Station's Harmony module at 1:34pm ET (1734 UTC). @NASA_Astronauts Butch Wilmore and Suni Williams will soon make their way into the orbital laboratory, where they'll spend about a week. pic.twitter.com/BtcXA4Vq4t— NASA (@NASA)...

Slow motion liftoff of Starship on Flight 4 pic.twitter.com/9itFbrfxW7— SpaceX (@SpaceX) June 6, 2024 [Anotación en actualización] Ha habido cosas que han fallado. Pero aún así el cuarto lanzamiento del Starship ha cumplido todos sus objetivos, lo que no es poco: la...

La Administración Nacional del Espacio China (CNSA) ha confirmado que hace un par de horas el módulo de ascenso de la misión Chang'e 6 se ha acoplado correctamente con el orbitador y le ha transferido las muestras tomadas en el lado...

Impresión artística de una Starliner en órbita – Boeing [Anotación en actualización] Esta pasada noche, camino aún de la Estación Espacial Internacional (EEI), la Starliner Calypso de Boeing ha desarrollado dos nuevas fugas de helio aparte de la ya conocida con la...

Targeting Thursday, June 6 for Starship’s fourth flight test. A 120-minute launch window opens at 7:00 a.m. CT → https://t.co/bJFjLCiTbK pic.twitter.com/jWdhCAyk8I— SpaceX (@SpaceX) June 4, 2024 Todo está listo en la Starbase en Boca Chica para el cuarto lanzamiento del Starship, conocido...

Starliner to the stars!At 10:52am ET, @BoeingSpace #Starliner lifted off on a @ULALaunch Atlas V for the first time with @NASA_Astronauts aboard. This Crew Flight Test aims to certify the spacecraft for routine space travel to and from the @Space_Station. pic.twitter.com/WDQKOrE5B6— NASA...

El cohete ya completamente cargado de propelentes y listo para volar a la espera de la llegada de sus tripulantes – NASA Desde hace unas horas está en marcha el tercer intento de lanzamiento de la primera misión tripulada de la Starliner....

Hace unas horas un cohete Electrón de Rocket Lab ponía en órbita el segundo y último satélite de la misión PREFIRE de la NASA para estudiar las emisiones de calor de los polos. Se trata da un par de CubeSat de...

Impresión artística del despegue de un Ariane 6 – ESA La Agencia Espacial Europea (ESA) Acaba de anunciar que el primer lanzamiento del Ariane 6 será el próximo 9 de julio. Lo ha anunciado, tal y como había prometido, en la Exhibición...

Kononenko durante el entrenamiento para su actual misión – Roscosmos Esta pasada noche el cosmonauta Oleg Kononenko ha alcanzado un total de 1.000 días en el espacio. Es la primera persona que supera esa cifra. Y no está sino aumentando su récord,...
Esta pasada madrugada el módulo de ascenso de la misión china Chang'e 6 despegaba de la superficie de la Luna con las muestras que ha recogido el brazo robot del aterrizador. Unos seis minutos después la cápsula con las muestras entraba...

Esta pasada noche el aterrizador de la misión china Chang'e 6 se posaba sin problemas en la superficie de la Luna para tomar muestras de su lado oculto. En concreto ha aterrizado en la Cuenca Aitken, donde todo parece indicar que...

A poco más de tres minutos del lanzamiento de la primera misión tripulada de una Starliner el sistema de control detuvo la cuenta atrás. Como es una ventana de lanzamiento instantánea con tan poco tiempo no había forma de intentarlo de...

La cápsula aproximándose a la EEI – NASA Hace unos minutos la cápsula de carga Progress MS-27 llegaba sin problemas a la Estación Espacial Internacional (EEI) y atracaba de forma automática en el puerto superior del módulo Poisk. Su llegada tenía un...
SLIM fotografiado por el rover LEV-2, cuyas ruedas se ven en primer plano a ambos lados de la parte inferior de la imagen – JAXA Esta semana se daban las condiciones de iluminación necesarias en el cráter Shioli de la Luna como...
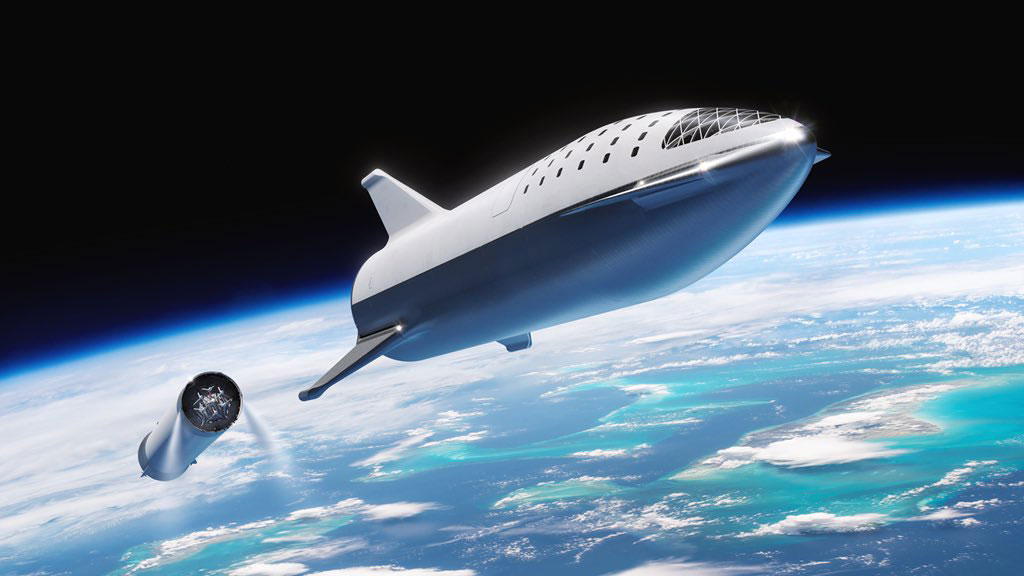
Impresión artística del lanzamiento de un Starship tripulado – SpaceX Cuando en 2018 SpaceX anunció que el multimillonario japonés Yusaku Maezawa había contratado una misión tripulada alrededor de la Luna en un Starship para ser lanzada en 2023 ya dije que se...

El cohete y la cápsula listos para volar – NASA Está de nuevo en marcha la cuenta atrás para el lanzamiento de la primera misión tripulada de una Starliner, previsto para esta tarde a las 18:25, hora peninsular española (UTC +2). Dado...
El Starship del cuarto vuelo de prueba durante un ensayo de carga de propelentes – SpaceX SpaceX ha puesto fecha al cuarto lanzamiento del Starship, conocido como Integrated Flight Test 4, IFT-4: el próximo miércoles 5 de junio. Siempre pendiente del permiso...

Butch Wilmore y Sunita Williams de vuelta en el Centro Espacial Kennedy (KSC). Llevan en cuarentena más de un mes – NASA Tras una reunión de todas las partes implicadas esta pasada noche la NASA ha autorizado otra vez el lanzamiento de...

The Progress 88 cargo craft is safely in orbit and headed to the station following launch from the Baikonur Cosmodrome in Kazakhstan at 5:43am ET. Progress will spend two days in orbit before docking to the Poisk module at 7:47am Saturday, June...

Separation complete: #EarthCARE is alone in space for the first time.The satellite will now automatically deploy its solar array and begin transmitting telemetry.Next up: the all-important ‘acquisition of signal’ from Hartebeesthoek ground station in South Africa in approx.… pic.twitter.com/2UQDDzn9RP— ESA Operations (@esaoperations)...

La Progress MS-25 a su partida de la EEI – Roscosmos A primera hora de esta tarde la cápsula de carga Progress MS-25 terminaba su misión con una reentrada controlada en la atmósfera sobre una zona remota del Pacífico. A bordo llevaba...

Este espectacular vídeo 360° ha sido creado por el Centro Goddard de Vuelos Espaciales de la NASA y es una fiel simulación para entender lo que sucede al aproximarse a un agujero negro y caer en su interior. Digo «fiel» por...
Impresión artística de la Voyager 1 en el espacio – NASA/JPL Según informaba la NASA hace unas horas la Voyager 1 vuelve a enviar datos de dos de sus instrumentos por primera vez desde noviembre de 2023. En concreto son el Subsistema...

La Starliner en lo alto del cohete que la va a lanzar – NASA En la más reciente actualización del auténtico culebrón venezolano que está siendo en concreto el lanzamiento de la primera misión tripulada de la Starliner de Boeing y en...

Sophie Adenot y Raphaël Ligeois posan sonrientes para un selfie tras el anuncio – ESA/Raphaël Ligeois La Agencia Espacial Europea (ESA) acaba de anunciar que la francesa Sophie Adenot y el belga Raphaël Ligeois, en ese orden, serán las primeras personas en...

El ATV-3 Edoardo Amaldi aproximándose a la EEI en 2012 – NASA La directiva de la Agencia Espacial Europea (ESA), reunida en Bruselas con los ministros de los países miembros y con los ministros del Consejo de Europa, acaba de anunciar que...

Personal de Boeing trabajando en una Starliner – Boeing Sí, es como el día de la marmota pero en versión espacial: la primera misión tripulada de la Starliner se retrasa de nuevo, aunque esta vez sin fecha de lanzamiento. De un correo...
Impresión artística del despegue de un Ariane 6 – ESA En la más reciente actualización sobre el primer lanzamiento del Ariane 6 la Agencia Espacial Europea ha reducido la ventana de lanzamiento de mes y medio a dos semanas. Así, si antes...

Hace unos minutos Blue Origin ha llevado a cabo su primer lanzamiento suborbital tripulado en casi dos años. El parón ha sido debido a la explosión del cohete New Shepard en un lanzamiento no tripulado el 13 de septiembre de 2022....

Falcon 9 completes its first 21st launch and landing! pic.twitter.com/m77JbAdNKJ— SpaceX (@SpaceX) May 18, 2024 Esta pasada noche un Falcon 9 de SpaceX ha puesto en órbita un lote de 23 satélites de la constelación Starlink de acceso a Internet. Pero lo...
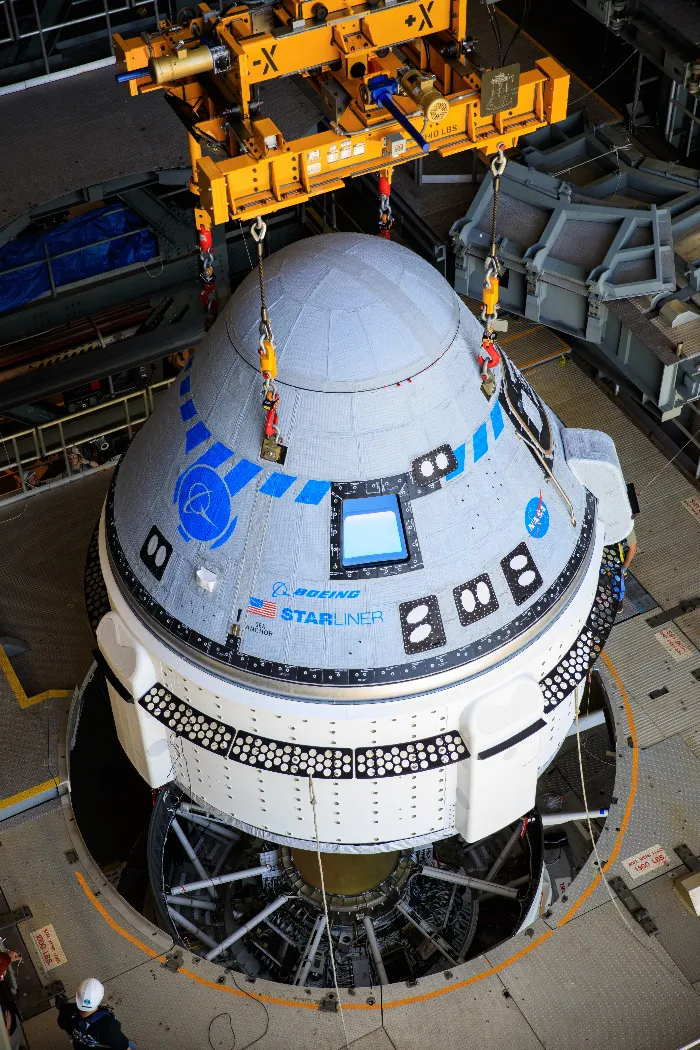
La Starliner y su módulo de servicio durante su integración con el cohete que las va a lanzar – NASA/Frank Michaux Boeing y la NASA han anunciado que necesitan más tiempo para solucionar la fuga de helio detectada hace unos días en...

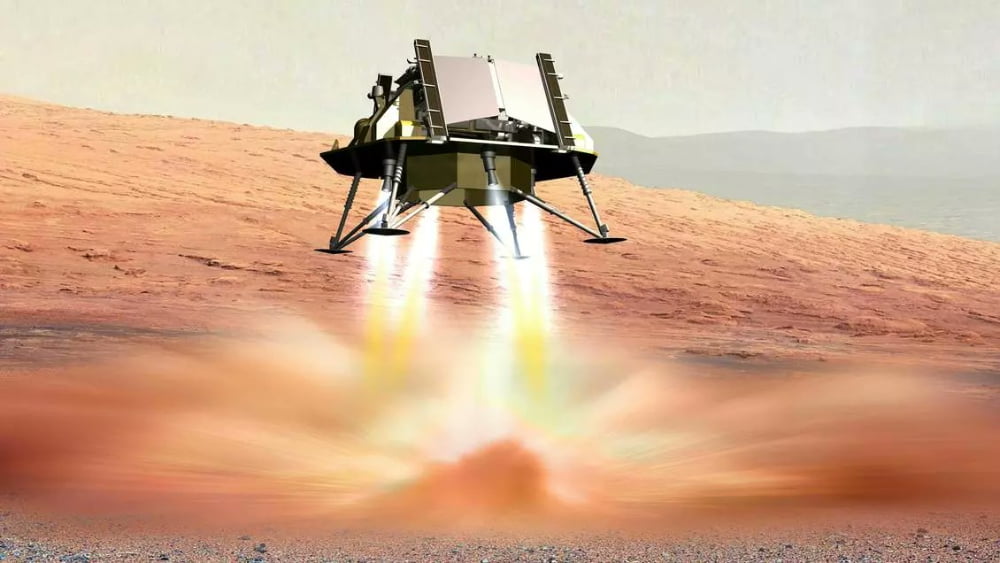
La historia de la misión ExoMars de la Agencia Espacial Europea (ESA) da para varios culebrones. Pero en su último capítulo la agencia europea y la NASA han firmado un acuerdo en el que retoman su colaboración para hacer aterrizar el...
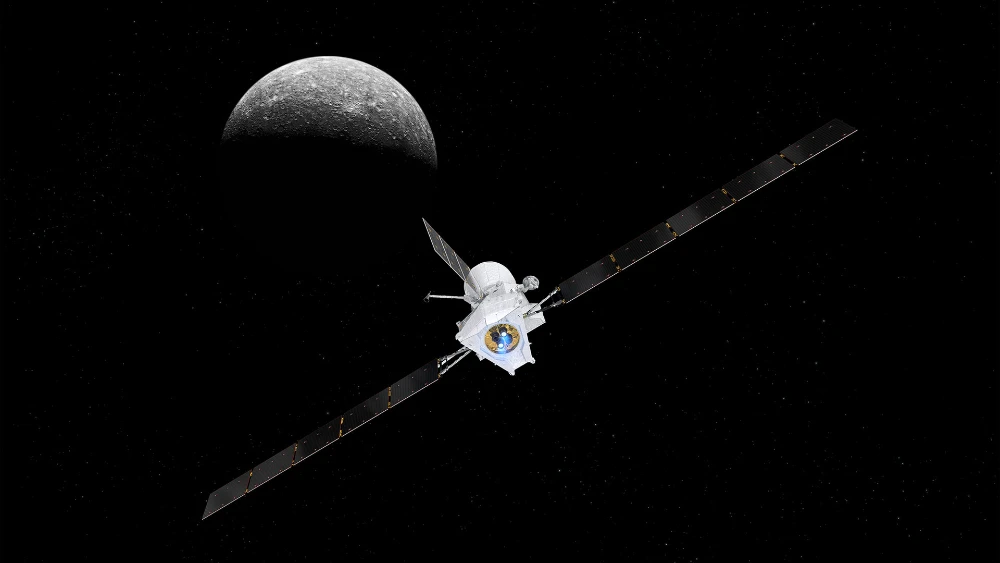
Impresión artística de BepiColombo en las proximidades de Mercurio – ESA/JAXA Según ha comunicado la Agencia Espacial Europea (ESA) hace unas horas la sonda BepiColombo tiene problemas con sus motores, que no ahora mismo no pueden funcionar a plena potencia. BepiColombo es...

La Starliner y su cohete de vuelta al «taller» – NASA Commercial Crew Sí, es el cuento de nunca acabar: Boeing acaba de anunciar que el primer lanzamiento tripulado de su cápsula espacial Starliner se retrasa de nuevo. En esta ocasión al...

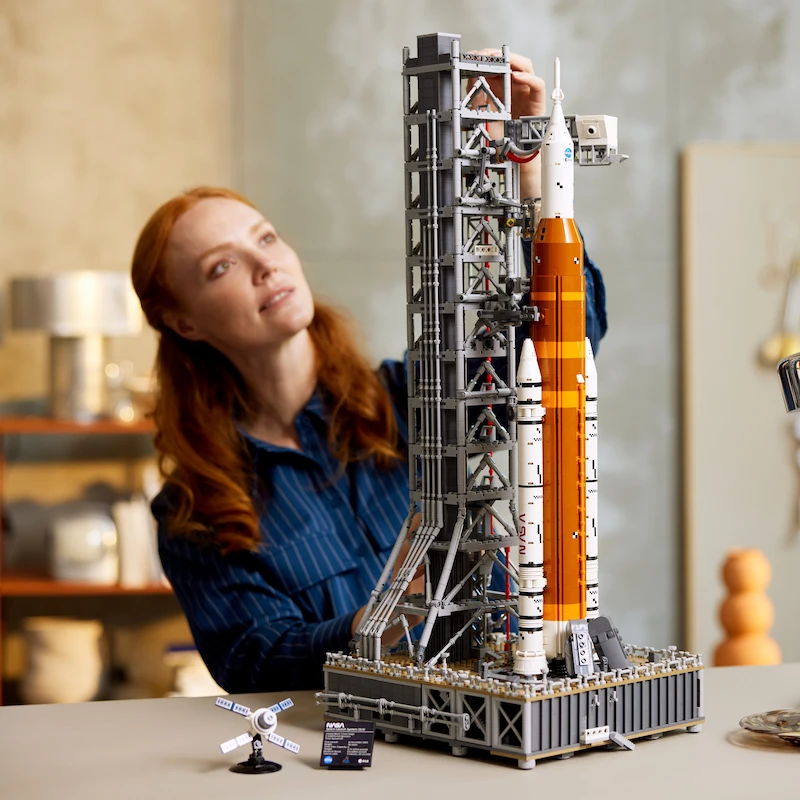
Ya vuelven a las andadas las malas gentes de Lego. En este caso con un conjunto un conjunto de 1.913 piezas que permite construir el rover lunar del programa Apolo. En concreto el de la misión Apolo 17. Aunque antes de...
Chang'e 6 probe‘s 53-day journey continues after performing the first near-moon braking procedure on Wednesday (May 8th).What's next? Here's a short video showing what will take place before the Chang'e 6 probe lands on the far side of the moon.#ChangE6 #Queqiao2 pic.twitter.com/ZGG9jDKdUt—...

Este vídeo del Solar Orbiter de la ESA muestra con todo lujo de detalles las imágenes de espículas y erupciones entre las zonas interiores y el exterior del Sol, la cromosfera. Algo que ya habíamos visto, pero ahora con más detalle....

La Starliner y su cohete en la plataforma de lanzamiento – NASA Esta pasada noche, a apenas un par de horas del momento del despegue, ha habido que aplazar el lanzamiento de la primera misión tripulada de la Starliner de Boeing. El...

La cuenta atrás para el lanzamiento de la primera Starliner tripulada acaba de arrancar a las 17:14, hora peninsular española, del 6 de mayo de 2024. Dura 11 horas y 20 minutos, incluyendo una pausa planificada de cuatro horas en T-menos cuatro...

The SpaceX Extravehicular Activity (EVA) suithttps://t.co/z2Z9iVpt6x #Maythe4thBeWithYou pic.twitter.com/peETlLCcDP— SpaceX (@SpaceX) May 4, 2024 SpaceX ha presentado por fin los trajes que se utilizarán en los paseos espaciales del programa de misiones tripuladas Polaris. Se trata de un programa liderado –y también financiado–...

La Starliner y su cohete en la plataforma de lanzamiento. Se puede ver el pasillo por el que la tripulación accederá a la nave en la noche del lunes al martes – ULA Unos días después de completar su Flight Readiness Review...

Despegue de la misión – Administración Espacial Nacional China (CNSA) Tras un lanzamiento sin problemas y su inyección en una trayectoria de transferencia lunar la misión china Chang'e 6 ya va camino de la Luna para traer muestras de su lado oculto....
La Endeavour poco después de abandonar el puerto frontal de la Estación Espacial Internacional – NASA TV Esta tarde la tripulación Crew-8 de la Estación Espacial Internacional (EEI) se subió a la cápsula Crew Dragon Endeavour con el objetivo de cambiarla de...

El cohete que va a lanzar la misión listo en su plataforma – Administración Espacial Nacional China (CNSA) Todo está aparentemente listo en el centro de lanzamientos espaciales de Wenchang para el de la misión china Chang'e 6 para traer muestras del...

Impresión artística de un Miura 5 tras la separación de la segunda etapa – PLD Space Desde hoy si tienes una carga útil que poner en órbita que vaya de 1 kg a una tonelada y quepa en la cofia del cohete...

Matt Eason ha unido una combinación de fuentes interesantes acerca de la Estación Espacial Internacional (ISS) en una sola página: 3D ISS Tracker [Nota: funciona en muchos navegadores pero no en todos]. Básicamente es una visualización de un globo terrestre con...

Esta mañana la cápsula tripulada china Shenzhou 17 se posaba en el área de aterrizaje de Donfeng en Mongolia, poniendo fin a su misión. A bordo venían Tang Hongbo, Tang Shengjie y Jiang Xinlin, quienes han estado a bordo de la...
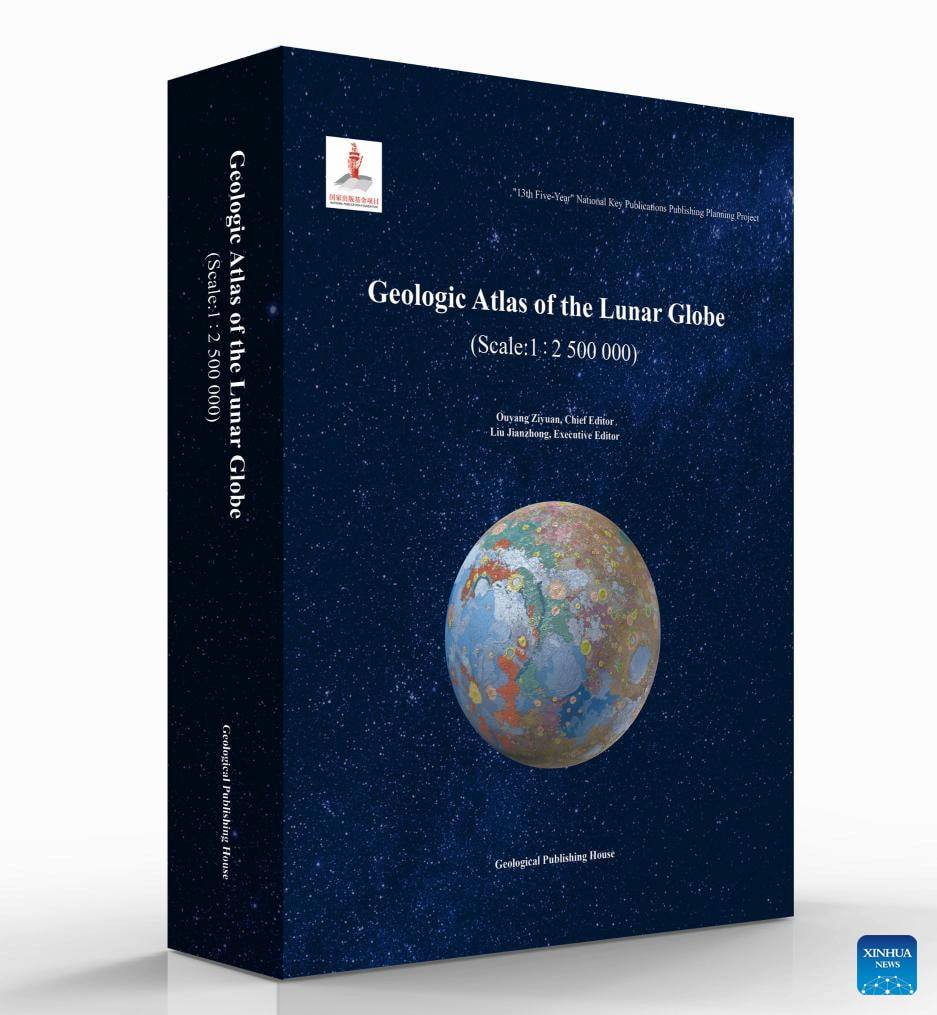
La Academia China de las Ciencias ha publicado el Atlas Geológico del Globo Lunar a escala 1:2,5 millones, un impresionante volumen con todo tipo de detalles sobre los aspectos geológicos de nuestro satélite. Los datos provienen de diversas fuentes, incluyendo el...
La Dragon 30 a su partida de la EEI – NASA Un amerizaje en el Golfo de México ha puesto fin a la misión de la cápsula de carga Dragon 30 (CRS-30) a la Estación Espacial Internacional (EEI). La cápsula llegó a...
Liftoff! pic.twitter.com/NolsTPxBBU— SpaceX (@SpaceX) April 28, 2024 Hace algo más de un mes un artículo de Politico afirmaba que la Unión Europea iba a firmar un acuerdo con SpaceX para lanzar cuatro satélites del sistema de navegación Galileo. Y mientras estaba pendiente...
Impresión artística de la Voyager 1 en el espacio – NASA/JPL Una actualización de software hecha a 24.000 millones de kilómetros de distancia ha permitido que la sonda Voyager 1 vuelva a enviar telemetría correctamente. La NASA espera que nuevas actualizaciones que...

La Starliner Calypso recién acoplada al Atlas V que ha de lanzarla – ULA Hace unas horas representantes de todos los departamentos involucrados de la NASA y de Boeing se reunieron para ver si la Starliner estaba lista para su primera misión...
Menos mal que todo el politiqueo que lo rodea y la nefasta gestión del proyecto por parte de Boeing han hecho que el cohete SLS de la NASA me caiga mal. Que si no lo mismo tendría el problema de necesitar...
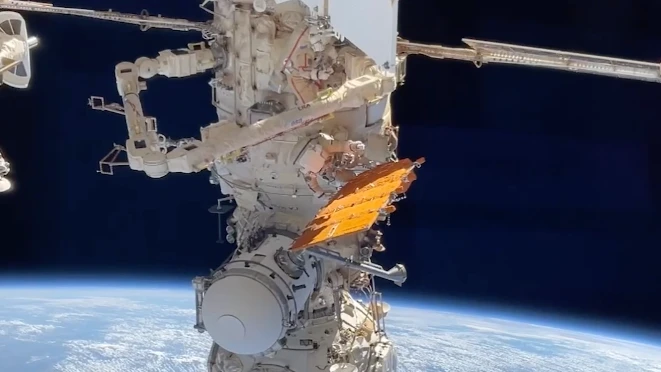
En la tarde/noche de ayer los cosmonautas Oleg Kononenko y Nikolai Chub llevaron a cabo un paseo espacial en el segmento ruso de la Estación Espacial Internacional (EEI). Durante él terminaron de desplegar la antena del radar de apertura sintética del...

A última hora de la tarde la cápsula espacial tripulada Shenzhou 18 se acoplaba de forma automática a la estación espacial china (CSS). A bordo iban tres astronautas que serán su nueva tripulación durante los próximos seis meses. El acoplamiento se...

La superficie de la Luna vista por SLIM al abrir los ojos a su cuarto día lunar – JAXA Lo del aterrizador japonés SLIM, de Smart Lander for Investigating Moon, Aterrizador inteligente para investigación lunar, es sorprendente: ha sobrevivido a su tercera...

Pablo tras recibir su parche de Alexander Gerst, el mentor de su grupo; sus alas de astronauta de Daniel Neuenschwander, el director de Exploración humana y robótica de la ESA; y con su diploma esperándolo en manos de Josef Aschbacher, el Director...
Impresión artística de dos astronautas de la NASA sobre la superficie de la Luna, algo que a saber cuándo veremos – NASA TV No habrá confirmación oficial este año porque tocan elecciones en los Estados Unidos. Pero según cuenta Eric Berger en...
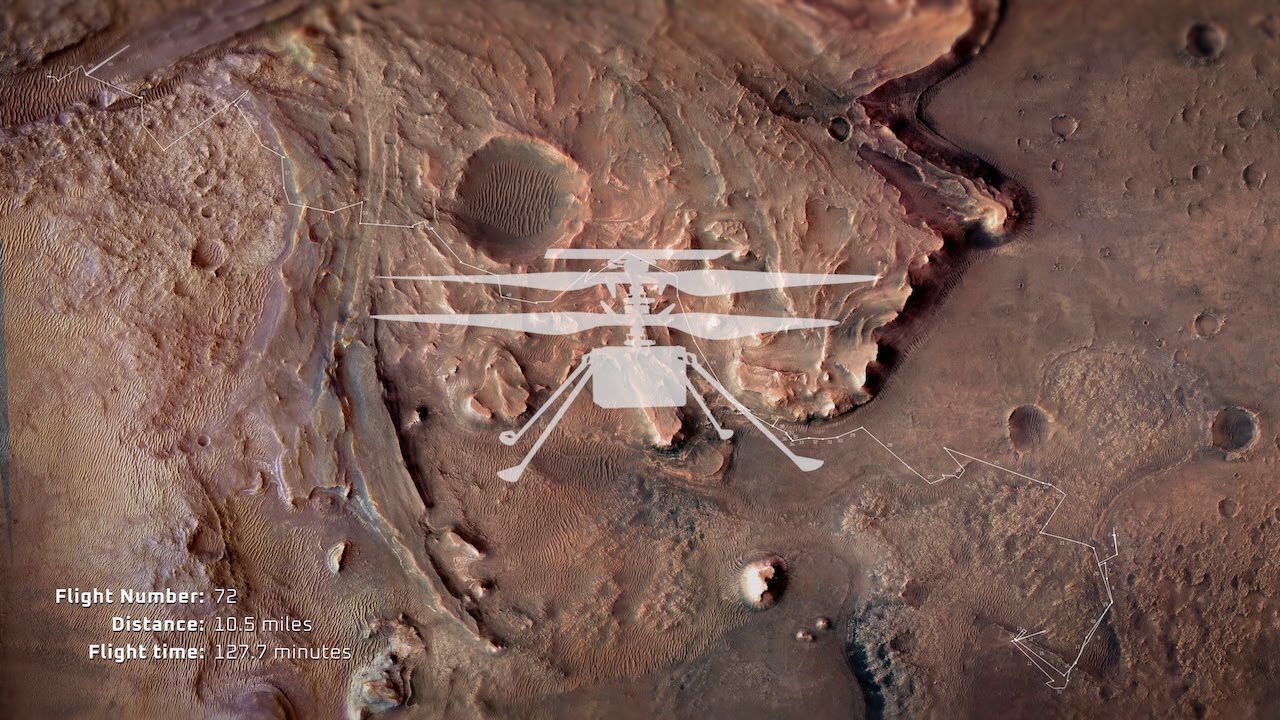
Hoy se cumplen tres años desde que el helicóptero Ingenuity hiciera su primer vuelo en Marte. Tenía que haber hecho cinco en treinta días pero al final hizo 72 en casi tres años. Este vídeo permite verlos en su conjunto. Ingenuity...
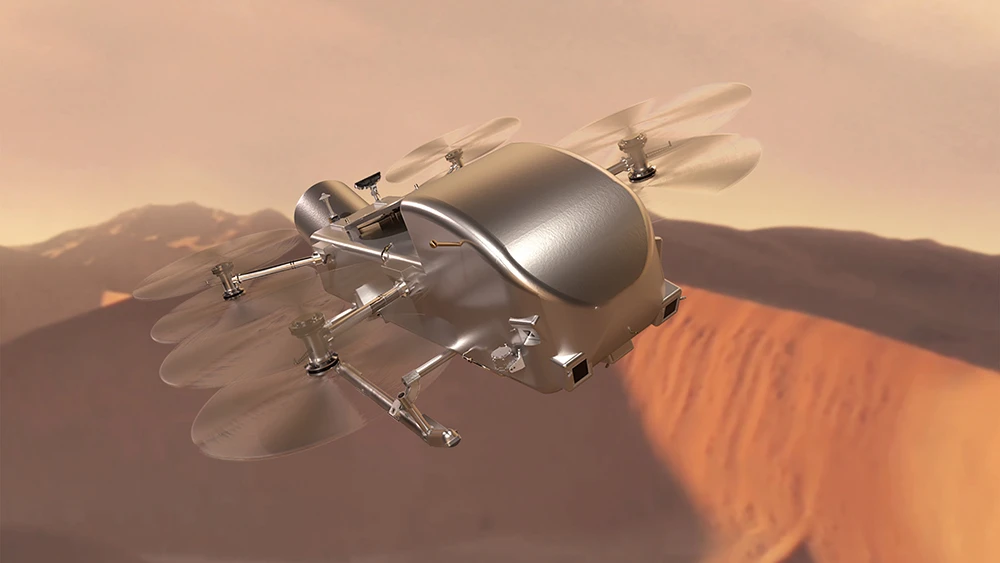
La NASA acaba de anunciar que ha dado el visto bueno para seguir adelante con el desarrollo del dron Dragonfly con el objetivo de lanzarlo rumbo a a Titán en julio de 2028… O al menos para intentarlo. Dragonfly es, para...

La Starliner Calypso de nuevo acoplada al Atlas V que ha de lanzarla – ULA Suena un poco a trabalenguas pero la Starliner Calypso está de nuevo acoplada a su cohete Atlas V para que Boeing intente lanzar su primera misión tripulada...

Ingenuity a la derecha de la imagen sobre las dunas en las que quedará para siempre y el aspa rota de su rotor a la izquierda del centro de la imagen – NASA/JPL-Caltech/LANL/CNES/CNRS El pasado 25 de enero la NASA daba por...

Hello. Looks like one of those pieces missed Ft Myers and landed in my house in Naples. Tore through the roof and went thru 2 floors. Almost his my son. Can you please assist with getting NASA to connect with me? I’ve...
Impresión artística de los distintos elementos de la misión en la configuración propuesta en 2022, que ya no es válida - NASA Bill Nelson, el administrador de la NASA, y Nicky Fox la administradora adjunta para la Dirección de misiones científicas, acaban...

Falcon 9 lands on the A Shortfall of Gravitas droneship – completing the first 20th launch and landing of a booster! pic.twitter.com/G0w4IlXzNP— SpaceX (@SpaceX) April 13, 2024 Esta pasado noche un Falcon 9 de SpaceX ponía en órbita sin problemas un lote...
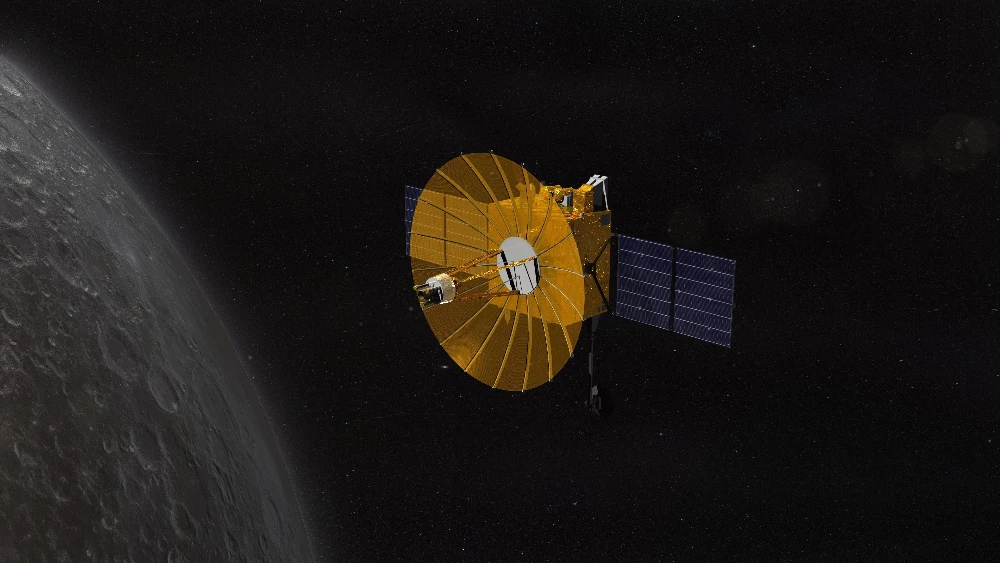
Impresión artística de Quaqiao 2 con su antena parabólica de 4 metros desplegada y en órbita alrededor de la Luna – CNSA El pasado 20 de marzo China lanzaba el satélite Queqiao 2 hacia la Luna. Su objetivo es servir de relé...

Esta semana United Launch Alliance (ULA) utilizó un Delta IV Heavy para poner en órbita un satélite militar secreto de la NRO (National Reconnaissance Office) de los Estados Unidos. Fue el decimosexto lanzamiento de un Delta IV Heavy desde que esa...

Impresión artística del futuro rover lunar que Japón pondrá para el programa Artemisa – Toyota/JAXA Esta semana el primer ministro de Japón, Fumio Kishida, está de visita en los Estados Unidos. Y entre otra multitud de anuncios la visita ha servido para...

Al final a la tercera ha sido la vencida y Roscosmos, la agencia espacial rusa, tiene acaba de lanzar el primer cohete Angará A5 desde el Cosmódromo de Vostochny. No es el primer Angará A5 que ha sido lanzado pero sí...

Liftoff at sunset for Falcon 9 pic.twitter.com/sw6EoiGY82— SpaceX (@SpaceX) April 7, 2024 Esta pasada noche un Falcon 9 de SpaceX puso en órbita 21 satélites de la constelación Starlink de acceso a Internet. Pero seis de ellos montan el hardware necesario para...

Hace unas horas la cápsula espacial tripulada Soyuz MS-24 tomaba tierra en las estepas de Kazajistán, poniendo fin a su misión. A bordo iban Oleg Novitskiy de Roscosmos, Marina Vasilevskaya de la Agencia Espacial de Bielorrusia, que ha sido la primera...

Impresión artística de un LTV genérico – NASA Hace unas horas la NASA anunciaba la selección tres empresas para seguir con el desarrollo del rover lunar que utilizarán las tripulaciones del programa Artemisa, conocido como LTV, de lunar terrain vehicle , vehículo...
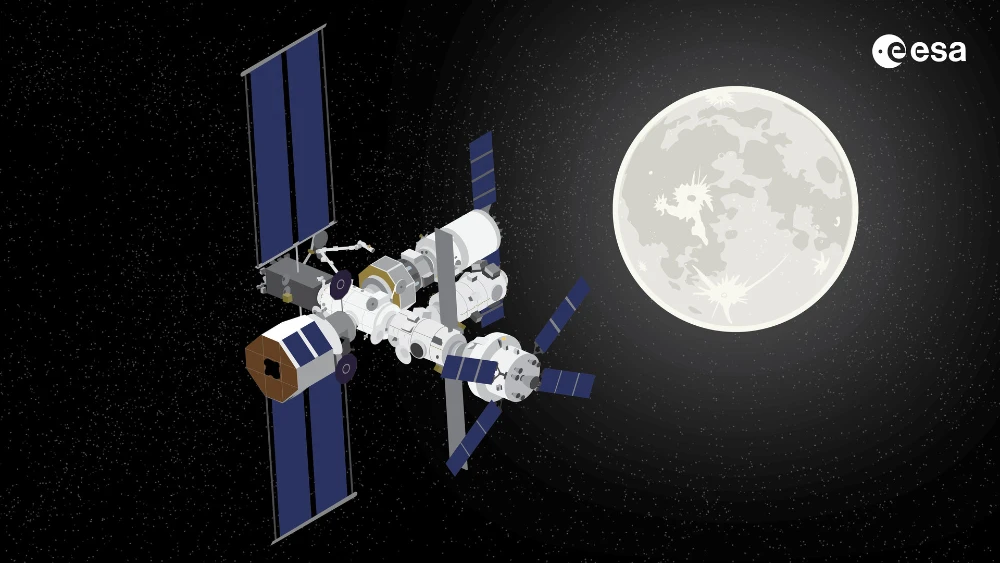
Configuración de la estación Gateway en abril de 2022. Clic para ver en grande – NASA La Agencia Espacial Europea (ESA) acaba de anunciar nuevos nombres para los módulos que va a construir para la futura estación lunar Gateway. Así que los...

Una Starliner a su llegada a la Estación Espacial Internacional en su misión de prueba no tripulada en mayo de 2022 – NASA La NASA y Boeing acaban de confirmar oficialmente que intentarán lanzar la primera misión tripulada de la Starliner a...
Impresión artística de la Voyager 1 en el espacio – NASA/JPL Aún no hay un comunicado oficial al respecto pero según una de las personas que trabaja en la estación de Canberra de la Red de Espacio Profundo (DSN) de la NASA...
El conjunto propuesto – CuteHackler036/Lego Estos días que estamos pendientes de que la NASA consiga solucionar los problemas de la venerable sonda, qué mejor que apoyar con tu voto la posibilidad de que Lego decida comercializar una Voyager 1 de Lego para...

Impresión artística de alguien de la tripulación de la misión Artemisa III colocando los instrumentos sobre la superficie de la Luna – NASA Aunque aún faltan años para su lanzamiento la NASA ha seleccionado los tres primeros instrumentos científicos que la misión...

Starlink en versión airBaltic - Martin Gauss/airBaltic A principios de este año airBaltic anunció que ofrecerá conexión gratuita a Internet en sus vuelos utilizando el servicio de Starlink. Ahora acaba de hacer las primeras pruebas. La aerolínea está trabajando con SpaceX para...
Impresión artística del terreno en las proximidades el polo sur de Encélado y los géiseres que salen de sus grietas – ESA/Science Office La Agencia Espacial Europea (ESA) acaba de hacer público el estudio con el que buscaba escoger el objetivo de...

Imagen más reciente enviada por SLIM – JAXA De nuevo el aterrizador japonés SLIM ha sorprendido a propios y extraños y ha sobrevivido a su segunda noche en la Luna y desde hace unas horas está de nuevo en contacto con el...

Imagen tomada por una de las cámaras de a bordo de Odiseo antes de entrar en reposo el pasado 29 de febrero – Intuitive Machines Era altamente improbable que el aterrizador Odiseo de Intuitive Machines sobreviviera a la noche lunar, que dura...
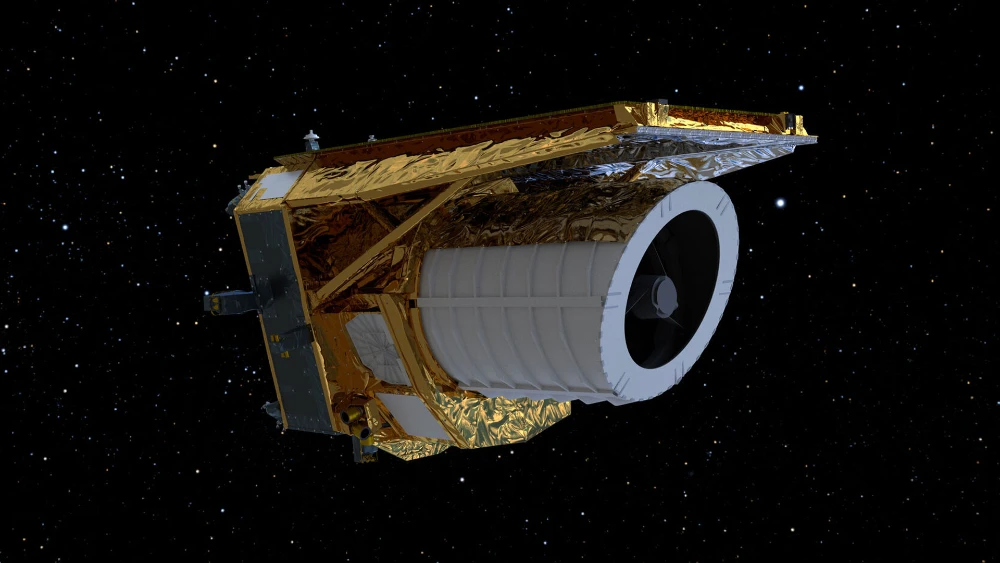
Impresión artística de Euclid en el espacio – ESA Se confirman las primeras impresiones adelantadas hace unos días: la ESA ha conseguido restaurar la vista del telescopio espacial Euclid al evaporar el hielo depositado en sus ópticas. El problema de que es...

Después de atracar de forma automática en el módulo Prichal de la Estación Espacial Internacional (EEI) unos minutos después de las 16:00, hora peninsular española (UTC +1) las escotillas entre la Soyuz MS-25 y la estación fueron abiertas aproximadamente a las...
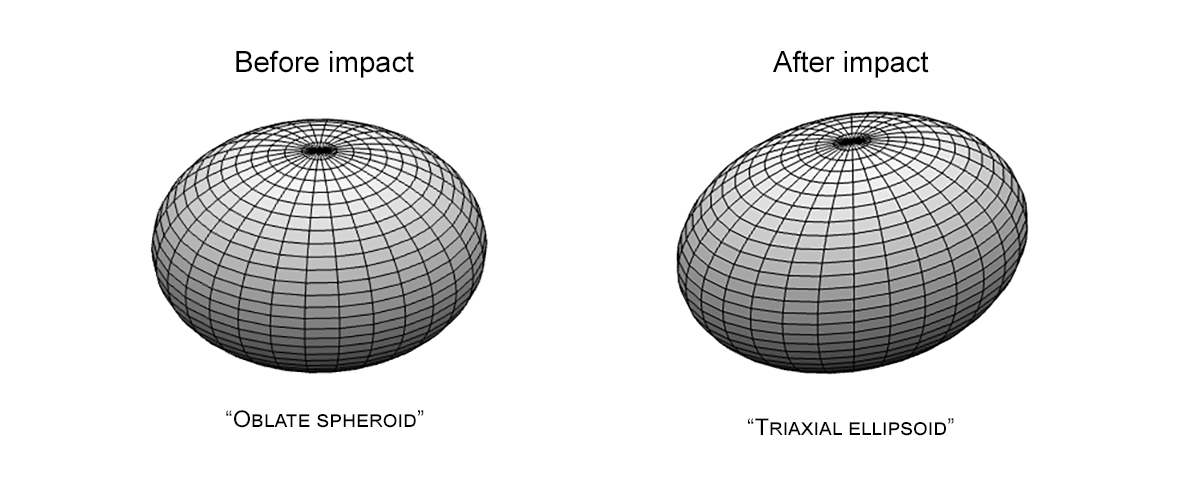
Dimorfo visto por el Telescopio espacial Hubble tras el impacto, que en esta imagen se produjo en la posición de las 10 – NASA, ESA, Jian-Yang Li (PSI), Joe Depasquale (STScI) El 26 de septiembre de 2022 la sonda DART de la...

El RLV-TD, también conocido como Pushpak, que es el demostrador del futuro transbordador espacial de la India, hacía su segundo aterrizaje hace un par de días. Igual que en su aterrizaje anterior fue soltado desde un helicóptero Chinook de la Fuerza...

A la segunda ha ido la vencida y hace unas horas la cápsula tripulada Soyuz MS-25 ha despegado por fin de la plataforma 6 del Sitio 32 del Cosmódromo de Baikonur con destino a la Estación Espacial Internacional (EEI). A bordo...

La cápsula de carga Dragon 30 (oficialmente SpaceX Dragon CRS-30) atracó a las 12:19 en el puerto superior del módulo Harmony de la Estación Espacial Internacional. Como es habitual la maniobra se realizó en modo autónomo pero los astronautas de la...

Esta pasada noche SpaceX ha lanzado la cápsula de carga Dragon 30 hacia la Estación Espacial Internacional (EEI). Despegó desde el Complejo de Lanzamiento 40 (SLC 40)de Cabo Cañaveral. Lleva a bordo unos 2.700 kilos de suministros y materiales para experimentos...

Cuando apenas faltaban veinte segundos para el encendido de los motores del cohete que tenía que haberla puesto en órbita los sistemas automáticos del Cosmódromo de Baikonur abortaron el lanzamiento de la cápsula espacial tripulada Soyuz MS-25. A bordo de ella...

El primer New Glenn en alcanzar la plataforma de lanzamiento durante sus pruebas iniciales – Blue Origin El cohete New Glenn de Blue Origin, la empresa de Jeff Bezos dedicada al espacio, ha superado con éxito sus primeras pruebas en la plataforma...

Hace unas horas un cohete Larga Marcha 8 colocaba en órbita de transferencia lunar el satélite Queqiao 2. Su objetivo inmediato es hacer de relé de comunicaciones para la misión Chang'e 6, que tiene como objetivo tomar muestras de la superficie...
Impresión artística de Euclid en el espacio – ESA La Agencia Espacial Europea (ESA) se ha encontrado con problemas causadas por el depósito de hielo en las ópticas del telescopio espacial Euclid, que apenas acaba de comenzar su misión hace dos meses....

El canal de YouTube del Museo Americano de Historia Natural tiene muchas maravillas y esta diría que es una de ellas. Es una visualización de todo el Universo conocido en 360°, al estilo de Potencias de 10, es decir, alejándose de...

Impresión artística de la Voyager 1 en el espacio intergaláctico – NASA-JPL/Caltech Desde el pasado mes de noviembre la sonda Voyager 1 sufre un problema que le impide transmitir datos de sus instrumentos ni de telemetría. Aunque afortunadamente sí hay comunicación con...

Starship re-entering Earth's atmosphere. Views through the plasma pic.twitter.com/HEQX4eEHWH— SpaceX (@SpaceX) March 14, 2024 Se mire como se mire el tercer lanzamiento de un Sarship ha sido un gran éxito para SpaceX por mucho que no haya logrado todos sus objetivos. Parafraseando...

Hace unas horas la empresa japonesa Space One, cuyo principal accionista es Canon, la de las cámaras, llevó a cabo el primer lanzamiento de su cohete Kairos. Pero todo terminó mucho antes de lo previsto con su explosión unos segundos después...

#Crew7 is ready for pickup!Our crew splashed down off the coast of Pensacola, Florida at 5:47am ET (0947 UTC). Next, they'll sit tight inside Dragon Endurance as recovery crews safely rendezvous with the spacecraft. pic.twitter.com/38GnnchdhV— NASA (@NASA) March 12, 2024 El amerizaje...

Liftoff of Transporter-10! pic.twitter.com/ZlUtUEaeA0— SpaceX (@SpaceX) March 4, 2024 Esta pasada noche a las 23:05, hora peninsular española (UTC +1) un Falcon 9 de SpaceX despegaba del Complejo de Lanzamiento Espacial 4 Este (Space Launch Complex 4 East, SLC 4E) de la...

Foto de grupo de la promoción recién graduada. De izquierda a derecha Douglas, Hathaway, Birch, Ayers, Delaney, Berrios, Al Mulla, AlMatrooshi, Menon, Wittner, Williams y Burnham – NASA Acaba de tener lugar la ceremonia de graduación de la promoción de astronautas de...

Tras un viaje sin problemas a bordo de la Crew Dragon Endeavour la tripulación Crew-8 ya está en la Estación Espacial Internacional (EEI). Su cápsula atracó en ella de forma automática poco antes de las 8:30, hora peninsular española (UTC +1)...
Los mecanismos de acoplamiento de la Orión y el HLS en acción – SpaceX Aunque aún faltan años para que el primer módulo lunar HLS esté listo y aunque la cápsula tripulada Orión aún tiene que hacer su primer vuelo tripulado –previsto...

La Agencia Japonesa de Exploración Aeroespacial (JAXA) acaba de comunicar que el telescopio espacial de rayos X XRISM (se pronuncia «crism») ha superado su fase de puesta en marcha y que con ello empieza su misión. Esta tiene como objetivo estudiar...

Esta pasada madrugada un Falcon 9 de SpaceX ha puesto en órbita la Crew Dragon Endeavour con la tripulación Crew-8 a bordo. Su destino es la Estación Espacial Internacional (EEI), a dónde tienen previsto llegar a las 9:00 del martes 5,...
Imagen tomada por una de las cámaras de a bordo de Odiseo – Intuitive Machines Desde hace unas horas el aterrizador Odiseo de Intuitive Machines está en reposo sobre la superficie de la Luna. La esperanza es que, con un poco de...

Watch this video to see the training that the four astronaut designations from #ISRO went through to get ready for the first crewed #Gaganyaan mission! pic.twitter.com/oGe4XVEwSM— ISRO InSight (@ISROSight) February 27, 2024 Aunque ya han superado una fase de entrenamiento de 13...

Despegue del segundo Starship – SpaceX La Administración Federal de Aviación de los Estados Unidos (FAA) ha dado por terminada su investigación sobre el segundo lanzamiento del Starship (OTF-2). En él tanto la primera etapa Super Heavy, el Booster B9, como la...

Desde hoy, 26 de febrero de 2024, Tang Hongbo se ha convertido en el astronauta chino que más tiempo acumula en el espacio. En concreto ha alcanzado la cifra de 215 días en órbita, lo que es un nuevo récord para él...
SLIM «haciendo el pino» sobre la superficie de la Luna – JAXA He de reconocer que no daba un duro por ello pero la Agencia Japonesa de Exploración Aeroespacial (JAXA) ha anunciado hace unas horas que ha conseguido retomar el contacto con...

"ODYSSEUS" LUNAR LANDER TIPPED OVER!@Int_Machines CEO Steve Altemus says Odysseus landing pad probably caught a rock at touchdown and tipped over.A.k.a "dynamic rollover".Lander still working and communicating. pic.twitter.com/UJf9Th0oJq— Pascal Lee (@pascalleetweets) February 24, 2024 A pesar de que Intuitive Machines y la...

Impresión artística de Odiseo en la Luna – Intuitive Machines Tras un lanzamiento perfecto y una fase de vuelo de la Tierra a la Luna sin demasiados problemas el aterrizador Odiseo de Intuitive Machines aterrizó en el cráter Malapert A, a unos...

#Ariane6 est arrivée à #Kourou ! L'étage principal et l'étage supérieur du modèle de vol sont arrivés hier à bord du navire #Canopée. Ils ont ensuite été acheminés vers le bâtiment d'assemblage lanceur (BAL), au port spatial de l'Europe. #FairedécollerAriane6 pic.twitter.com/zOzK5cJbDg— Centre...

La cápsula por fin en Tierra – Varda Space Industries El 12 de junio de 2023 un Falcon 9 de SpaceX lanzó con éxito la misión compartida Transporter 8. Una de sus cargar útiles era el satélite W-Series 1, fabricado por Rocket...
El primer New Glenn en alcanzar la plataforma de lanzamiento – Blue Origin Blue Origin, la empresa dedicada a estas cosas de Jeff Bezos, el fundador de Amazon, dedicada acaba de poner el primer cohete New Glenn en la plataforma del Complejo...

Hace unos días, en concreto el pasado 14 de febrero, el telescopio espacial Euclid de la Agencia Espacial Europea empezaba su misión y se ponía a recoger datos. A lo largo de los próximos seis años, Euclid observará miles de millones...

Impresión artística de la segunda etapa de un Miura 5 con un adaptador MOSPA instalado – PLD Space La Agencia Espacial Europea (ESA) ha adjudicado un contrato a PLD Space enmarcado en el programa Boost! de la agencia para desarrollar un adaptador...

Los 212,6 gramos de Bennu que OSIRIS-REx ha traído a la Tierra – NASA/Erika Blumenfeld & Joseph Aebersold La NASA por fin ha conseguido pasar las muestras del asteroide Bennu que estaban en el interior del TAGSAM, el instrumento que las recogió,...

Tras el fracaso de su primer lanzamiento el 3 de marzo de 2023 hace unas horas conseguía por fin lanzar con éxito su nuevo cohete H3. Se trata de un lanzador medio que tiene como objetivo sustituir al H-IIA. Tiene mayor...

Tal y como estaba previsto la cápsula de carga rusa Progress MS-26 atracó esta mañana de forma automática en la Estación Espacial Internacional (EEI). Aunque Oleg Kononenko y Nikolai Chub estaban al tanto para tomar el control manual usando el sistema...

El problema de los tres cuerpos es más difícil de lo que parece. Aplicable a la mecánica celeste, consiste en calcular las posiciones y velocidades de tres cuerpos sometidos a atracción gravitacional mutua partiendo de unas posiciones y velocidades dadas. Como...

On Sol 1059 #Ingenuity rotated it's blades for the first time after the fateful Flight 72. And guess what, one of the blades is (almost) entirely missing! Credit: NASA/JPL-Caltech pic.twitter.com/jXABAo0QyW— Simeon Schmauß (@stim3on) February 14, 2024 Simeon Schmauß se ha dado cuenta...

Intuitive Machines successfully transmitted its first IM-1 mission images to Earth on February 16, 2024. The images were captured shortly after separation from @SpaceX's second stage on Intuitive Machines’ first journey to the Moon under @NASA's CLPS initiative. pic.twitter.com/9LccL6q5tF— Intuitive Machines (@Int_Machines)...

Esta pasada madrugada Rusia lanzaba la cápsula de carga Progress MS-26 rumbo a la Estación Espacial Internacional (EEI). Está previsto que se acople con ella a primera hora del sábado 17. Ocupará el puerto trasero del módulo Zvezda, recientemente dejado libre...

Esta pasada madrugada la cápsula de carga Progress MS-24 se desacoplaba del módulo Zvezda de la Estación Espacial Internacional (EEI) para unas tres horas después hacer una reentrada controlada sobre el Pacífico, lo que puso fin a su misión. Como es...

Splashdown of Dragon confirmed – welcome back to Earth, @CommanderMLA, @WalterVilladei, @TURKastro, and @astro_marcus pic.twitter.com/9fF0hIT3gK— SpaceX (@SpaceX) February 9, 2024 Con varios días de retraso sobre las previsiones iniciales debido a que la meteorología no acompañaba la cápsula tripulada Crew Dragon Freedom...

Hace unos minutos, con varios días de retraso respecto a las previsiones iniciales debidos a la mala meteorología, un cohete Falcon 9 de SpaceX ponía en órbita sincrónica al Sol el satélite medioambiental PACE de la NASA. PACE, de Plankton, Aerosol,...

Zooming in on Ingenuity's final resting place among the sand ripples in Neretva Vallis.Full resolution panorama: https://t.co/jbDkOAM5bBCredit: NASA/JPL-Caltech/ASU/Simeon Schmauß #ThanksIngenuity #MarsHelicopter pic.twitter.com/EiBZYYjbZR— Simeon Schmauß (@stim3on) February 5, 2024 El pasado 18 de enero el helicóptero Ingenuity hizo su vuelo número 72 en...
Kononenko durante el entrenamiento para su actual misión – Roscosmos Este pasado fin de semana el cosmonauta Oleg Kononenko, quien se encuentra en la Estación Espacial Internacional (EEI) desde el pasado 18 de septiembre de 2023, alcanzaba los 879 días en el...
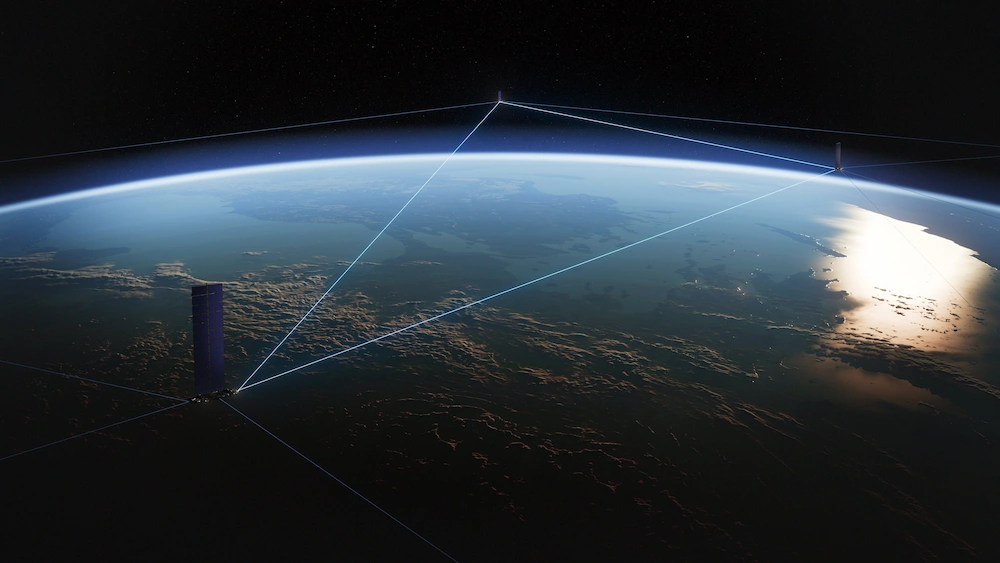
El otro día en la conferencia SPIE Photonics West celebrada en San Francisco el ingeniero de SpaceX Travis Breashears soltó algunos datos que fueron recogidos por PC Mag y que permite hacerse una idea de la capacidad actual de Starlink: 9.000...

La NG 20 ya capturada por el brazo robot de la Estación Espacial Internacional – NASA Tal y como estaba previsto la astronauta de la NASA Jasmin Moghbelli utilizó esta mañana el brazo robot de la Estación Espacial Internacional (EEI) para capturar...
SLIM fotografiado por el rover LEV-2, cuyas ruedas se ven en primer plano a ambos lados de la parte inferior de la imagen – JAXA No es sólo un titular más o menos poético, es que de hecho hace unas horas se...

Rocket Lab ha llevado a cabo hace unas horas su primer lanzamiento de 2024. Ha sido la misión bautizada como Four Of A Kind en la que un cohete Electrón que despegó del Complejo de lanzamiento 1 de la empresa en...

La cápsula de carga Cygnus NG 20 acaba de ser puesta en órbita camino de la Estación Espacial Internacional (EEI). Pero con la peculiaridad de que, por primera vez en la carrera de estas cápsulas, el cohete encargado de lanzarla ha...
SLIM fotografiado por el rover LEV-2, cuyas ruedas se ven en primer plano a ambos lados de la parte inferior de la imagen – JAXA No había muchas esperanzas pero ha habido suerte y ayer por la noche –hora peninsular española– la...

El avión cohete VSS Unity de Virgin Galactic hizo su sexto vuelo casi al espacio el 26 de enero de 2023, cumpliendo con lo anunciado por la empresa de que volaría en enero. A bordo iban piloto, copiloto, y cuatro turistas...
テレメや最終姿勢から再現すると、SLIM着陸の瞬間はこんな感じだったんですかね?(さすがに接地後の動きは推測ですが)#天文仮想研究所 pic.twitter.com/qobGS7gdUp— S_朝霧@VRC (@s_asagiri_v) January 26, 2024 El pasado día 19 el aterrizador lunar SLIM de la Agencia Japonesa de Exploración Aeroespacial (JAXA) se posaba sobre la Luna de una sola pieza, o eso parecía. Esto convertía a Japón en el quinto...
Impresión artística del Miura 5 en su plataforma de lanzamiento en Kourou – PLD Space Diana Morant, la ministra de Ciencia, Innovación y Universidades, acaba de anunciar que PLD Space ha sido la única adjudicataria en la fase final. El objetivo del...

[Anotación en actualización] La NASA acaba de anunciar que tras su vuelo número 72 al menos una de las aspas de los rotores del helicóptero Ingenuity ha resultado dañada, lo que le impedirá levantar el vuelo de nuevo. Así que ha...
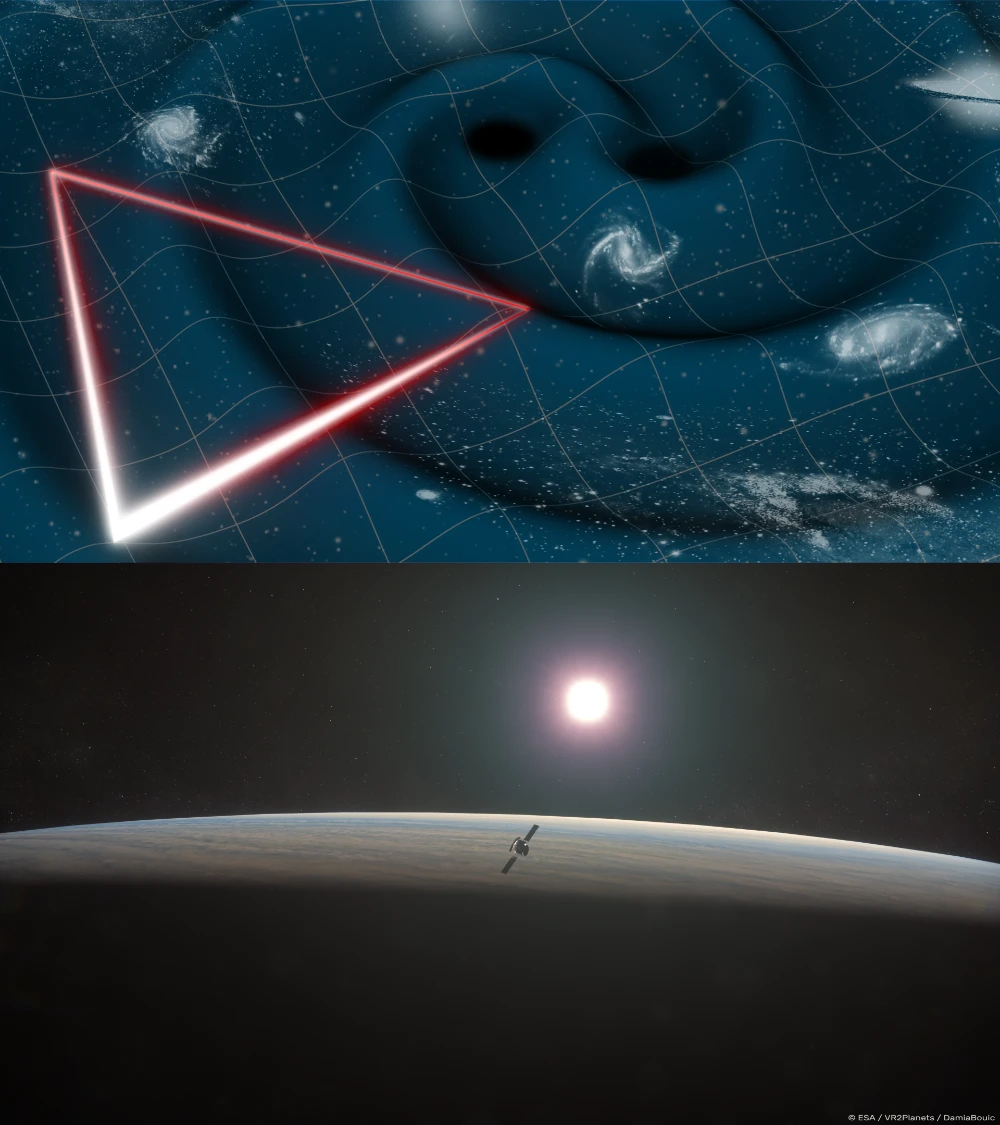
Impresión muy artística de LISA (arriba) y otra no tan artística de EnVision. (abajo) – ESA La Agencia Espacial Europea (ESA) acaba de anunciar que ha adoptado el observatorio espacial de ondas gravitacionales LISA y la sonda para estudiar Venus EnVision. En...
Impresión artística del Miura 5 en su plataforma de lanzamiento en Kourou – PLD Space Nuestros amigos de PLD Space son una de las cinco empresas seleccionadas por la Agencia Espacial Europea (ESA) y la Comisión Europea (CE) en el primer lote...
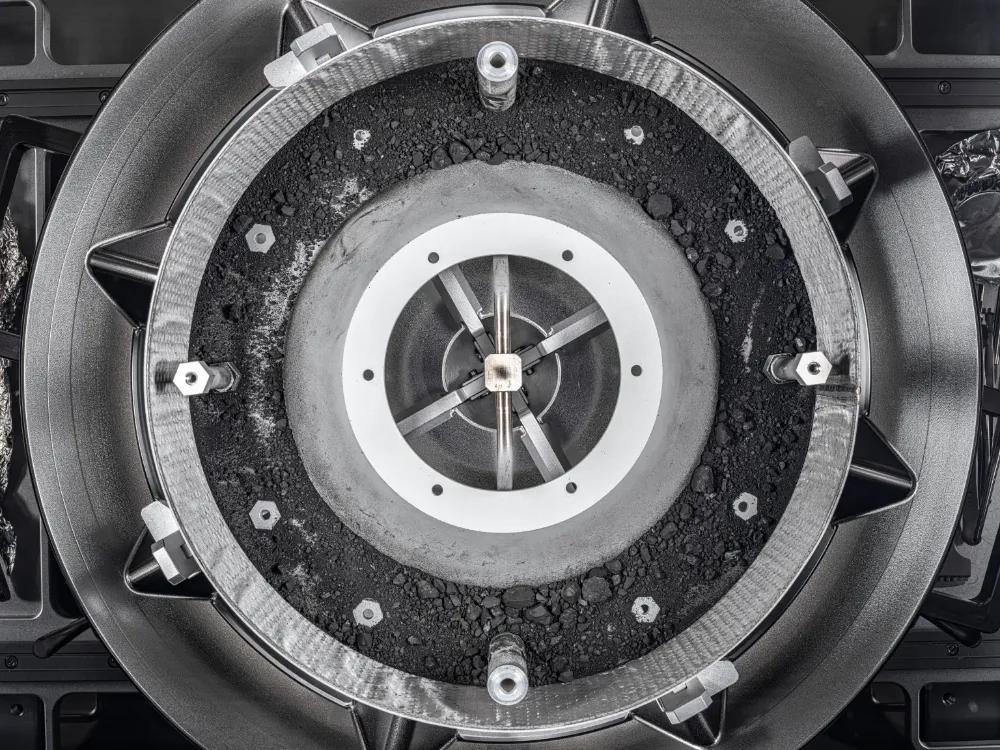
Las muestras «tímidas« por fin al descubierto – NASA/Erika Blumenfeld y Joseph Aebersold EL pasado 24 de septiembre la cápsula con muestras del asteroide Bennu que la misión Osiris-REX de la NASA traía de vuelta a casa tras algo más de siete...
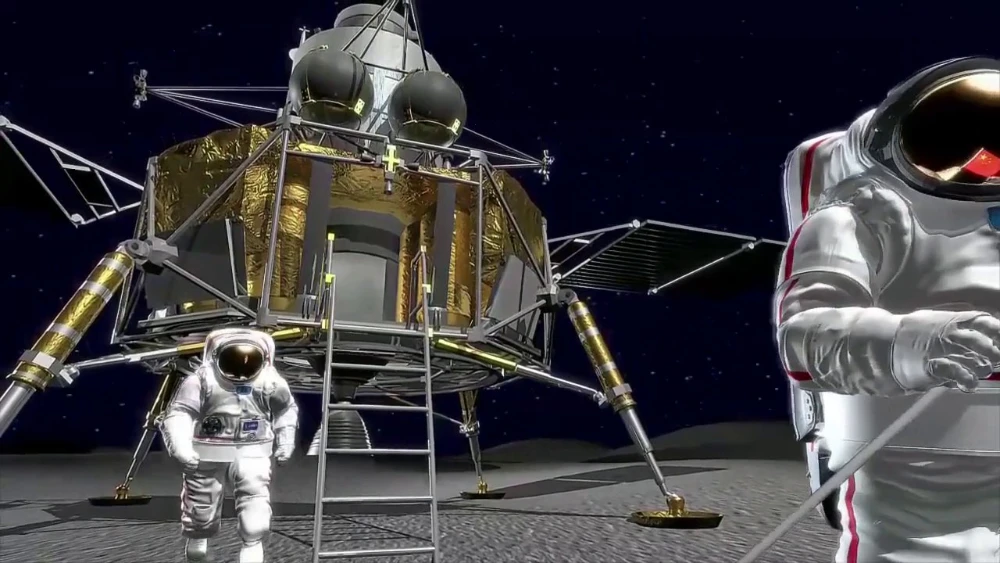
Lanzamiento del Sputnik 1 David González Bárcena es graduado en Ingeniería Aeroespacial por la Universidad de León con un Máster Universitario en Sistemas Espaciales y un Doctorado en Ingeniería Aeronáutica por la Universidad Politécnica de Madrid. Actualmente es Profesor Ayudante Doctor en...

Ingenuity sobre la superficie de Marte el 16 de abril de 2021, aún antes de llevar a cabo su primer vuelo – NASA/JPL-Caltech/ASU [Anotación en actualización] El 18 de enero el helicóptero Ingenuity de la NASA hacía su vuelo número 72 en...

Dragon docked with the @space_station pic.twitter.com/wb3j9CPXcS— SpaceX (@SpaceX) January 20, 2024 Hace unas horas la Crew Dragon Freedom atracaba en el puerto frontal de la Estación Espacial Internacional en la que es la tercera misión tripulada privada a la Estación Espacial Internacional...
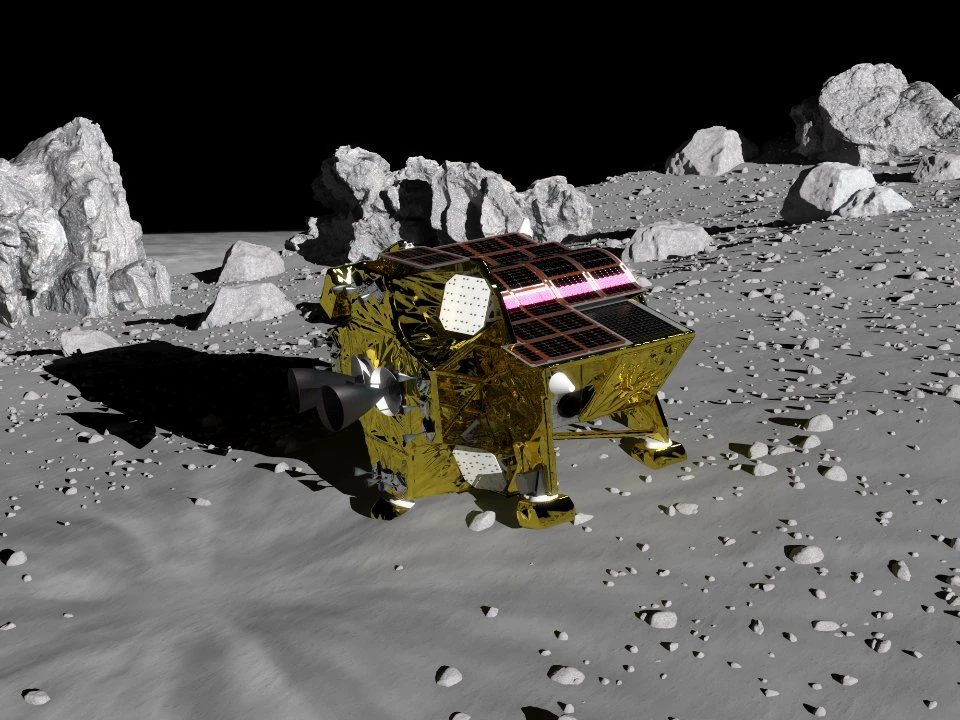
Impresión artística de SLIM sobre la Luna – JAXA [Anotación en actualización] Esta tarde a las 16:20, hora peninsular española, Japón ha conseguido colocar de una pieza sobre la Luna el aterrizador SLIM. Eso lo convierte en el quinto país en lograr...
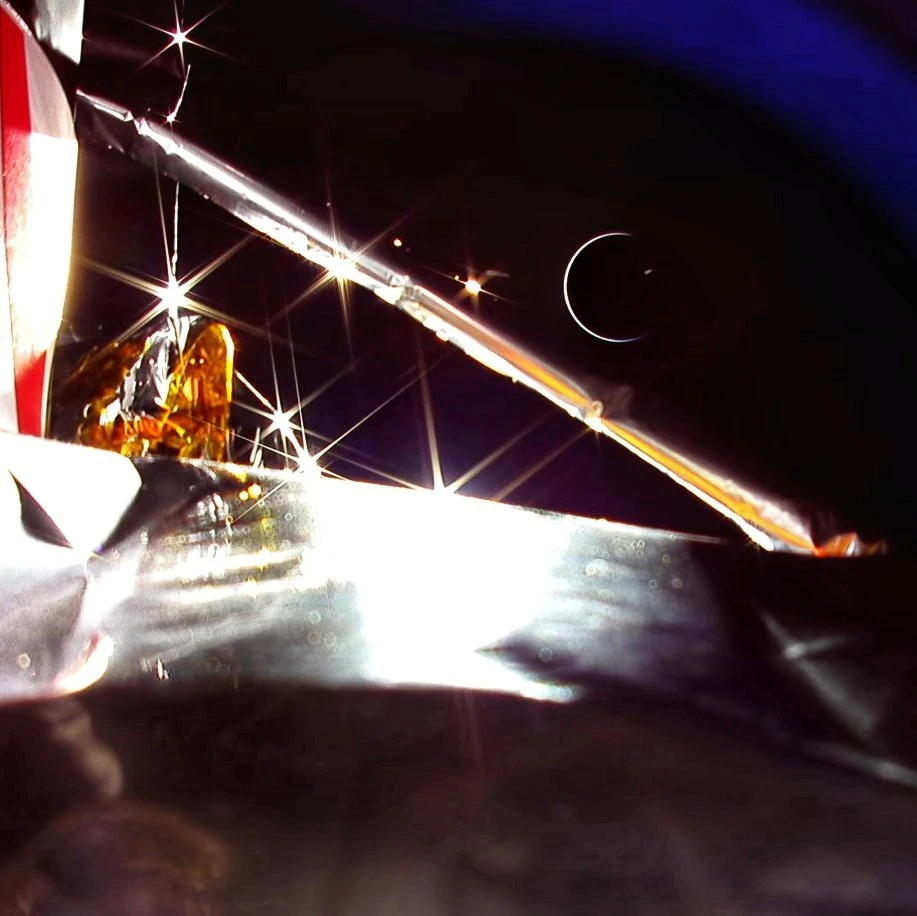
La Tierra vista por Peregrine pocas horas antes del fin de su misión – Astrobotic El pasado 8 de enero el primer cohete Vulcan en volar ponía de camino hacia la Luna al aterrizador Peregrine de Astrobotic. Pero si bien el lanzamiento...
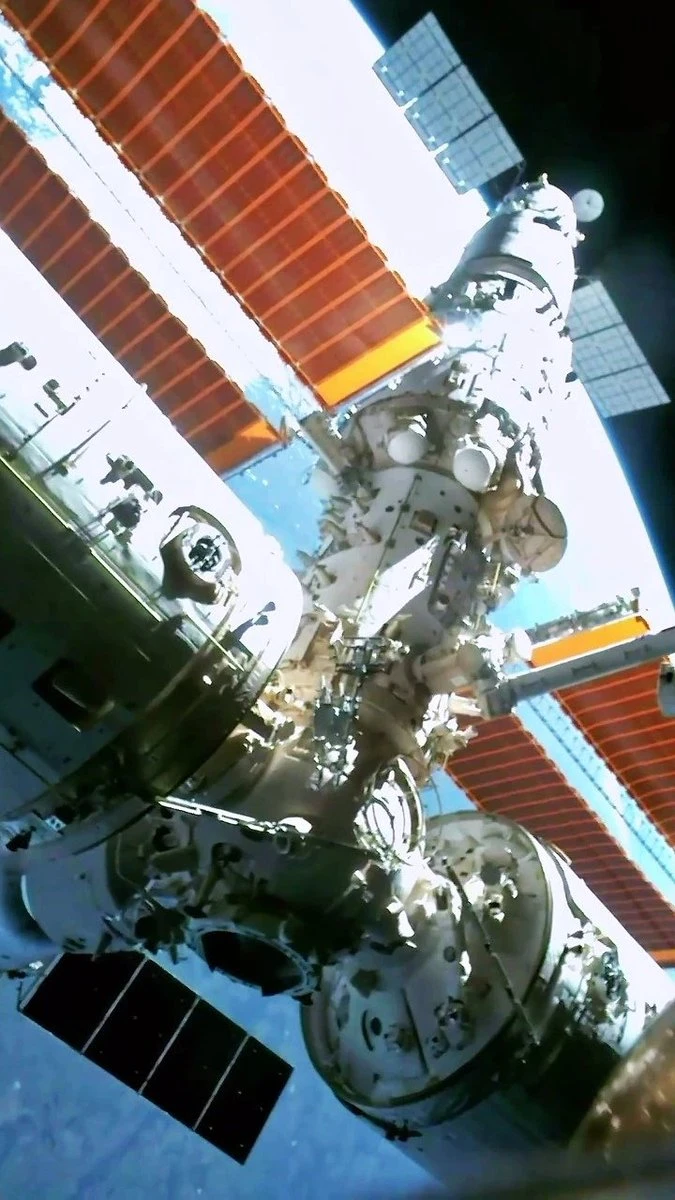
Lanzamiento del Tianzhou 7 – CMSA El carguero Tianzhou-7 ya está en la estación espacial china (CSS por sus siglas en inglés). Se acopló de forma automática con el puerto trasero del módulo Tianhe algo más de tres horas y media después...

Neftali Hernández, parte del equipo de conservación de muestras OSIRIS-REx, coloca en su sitio una de las herramientas desarrolladas específicamente para abrir el contenedor de muestras – NASA/Robert Markowitz El 24 de septiembre de 2023 la cápsula que contiene las muestras del...

El pasado 2 de enero SpaceX ponía en órbita un lote de 23 satélites Starlink. Pero con la peculiaridad de que seis de ellos tenían el hardware necesario para comunicarse con teléfonos móviles estándar. La empresa acaba de informar que el día...

Multiple cam views of the launch. Via the sponsor : HLA https://t.co/AGyzs5gIWG? pic.twitter.com/eCJahSBhKH— Ace of Razgriz (@raz_liu) January 11, 2024 Seguir todos los desarrollos en la industria espacial china, en especial después de su liberalización, es misión imposible. Pero si hay un...
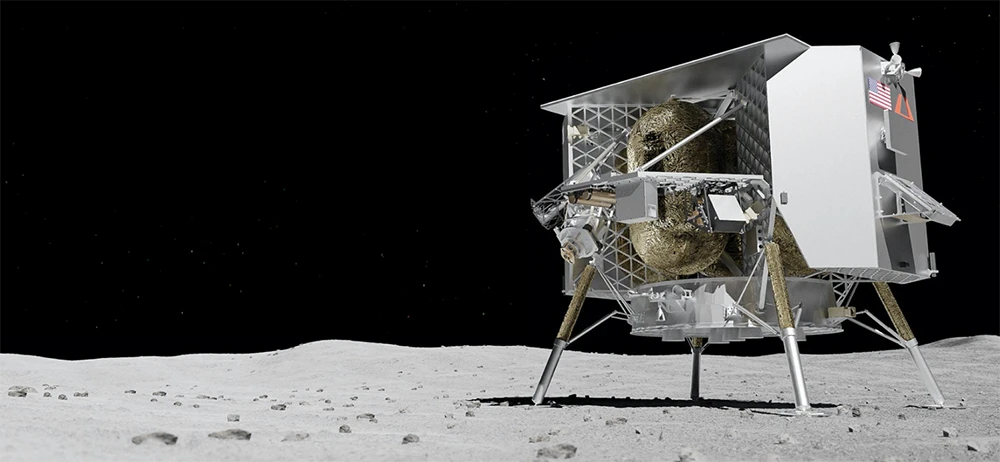
Impresión artística de Peregrine en la Luna, a dónde ya nunca llegará – Astrobotic En el momento de publicar esta anotación al aterrizador lunar Peregrine de Astrobotic le quedan unas veinticuatro horas de vida. Esto es debido a que a las pocas...
Impresión artística de dos astronautas de la NASA sobre la superficie de la Luna – NASA Para sorpresa de aproximadamente nadie la NASA acaba de anunciar que, con la seguridad como prioridad, ha decidido aplazar las misiones Artemisa II y Artemisa III,...
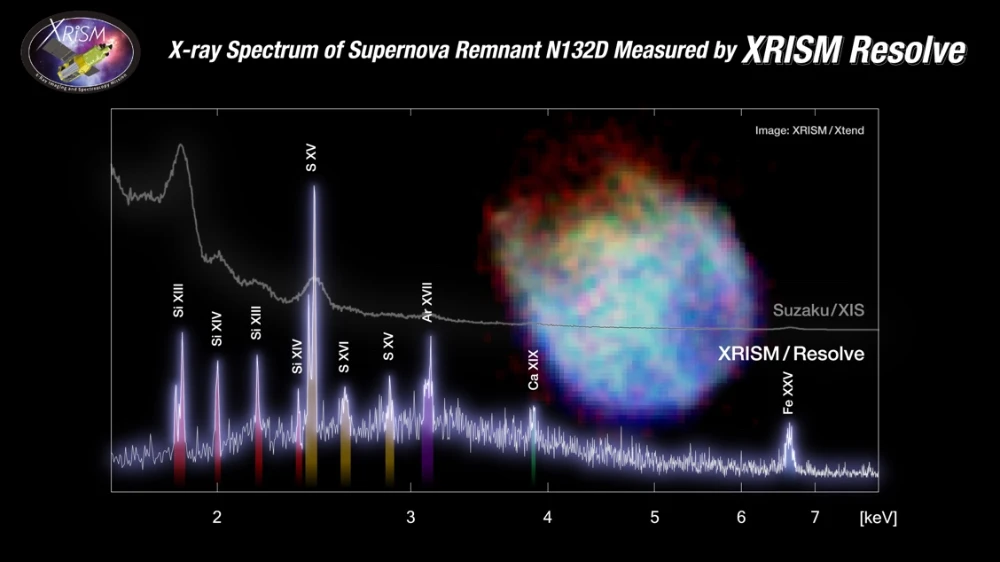
La Agencia Japonesa de Exploración Aeroespacial (JAXA) ha publicado las primeras imágenes obtenidas por el telescopio espacial de rayos X XRISM (se pronuncia «crism»), lanzado el pasado 7 de septiembre. Tal y como se puede ver en el vídeo de arriba...

Hace unas horas un cohete chino Larga Marcha 2C ha lanzado la sonda Einstein para el estudio de fuentes de rayos X cósmicas desde el Centro de Lanzamiento de Satélites de Xichang. La ha colocado, tal y como estaba previsto, en...

Esta mañana el primer cohete Vulcan Centaur de United Launch Alliance (ULA) puso el aterrizador lunar Peregrine de Astrobotic de camino a la Luna en un lanzamiento perfecto. Pero sobre las 15:30, hora peninsular española (UTC +1), unas seis horas después...
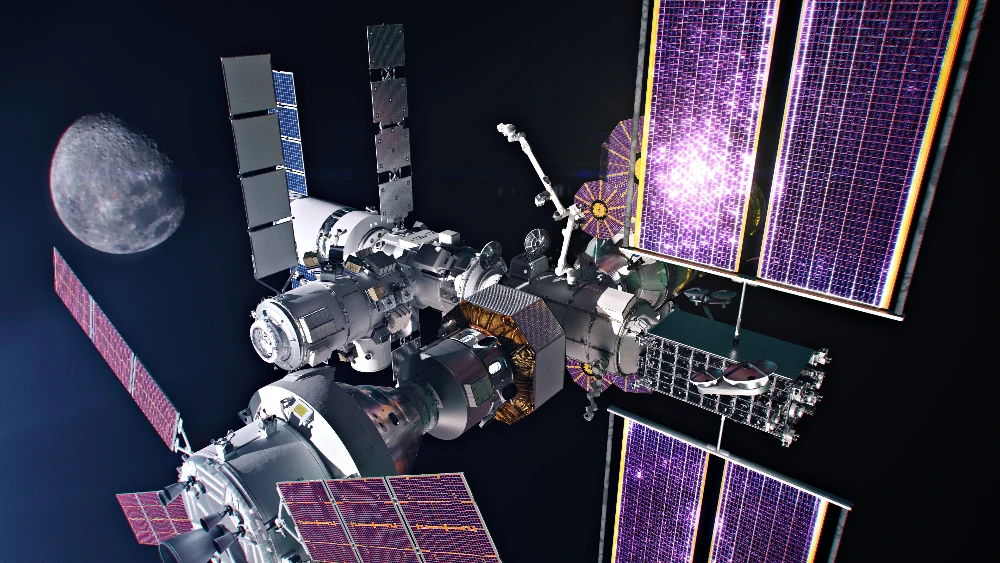
Impresión artística de la estación Gateway con la esclusa a la izquierda de la cápsula Orión que está atracada en la estación – NASA Hace unas horas la NASA y el Centro Espacial Mohammed bin Rashid (MBRSC por sus siglas en inglés)...

LIFTOFF of the first United Launch Alliance #VulcanRocket! pic.twitter.com/wZMlPxWr4l— ULA (@ulalaunch) January 8, 2024 El Vulcan –más correctamente Vulcan Centaur– de United Launch Alliance (ULA) acaba de convertirse en el primer cohete estadounidense propulsado por metano y oxígeno líquidos (metalox) en ser...

Launch Weather Officer Brian Belson from the @SLDelta45 meteorology team predicts an 85 percent chance of acceptable conditions for Monday's #VulcanRocket launch of the #Cert1 mission. Launch window opens at 2:18amEST (0718 UTC).Full details: https://t.co/xFQoT0042V pic.twitter.com/JyoBTUd88X— ULA (@ulalaunch) January 6, 2024 La...
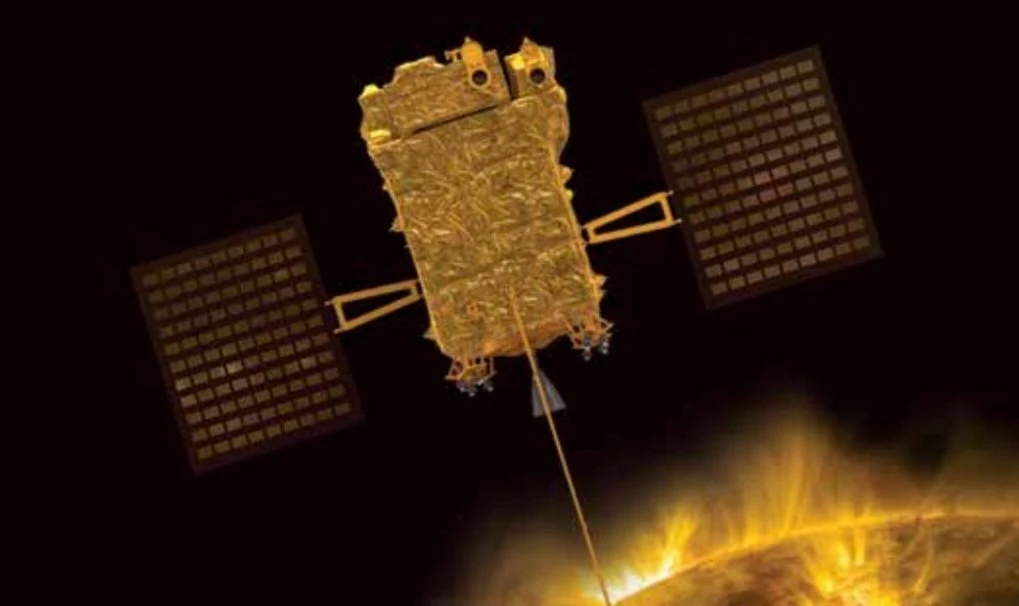
Impresión muy artística de Aditya-L1 observando el Sol desde el punto de Lagrange L1 - ISRO Los Reyes Magos le han traído un magnífico regalo a la Agencia India de Investigación Espacial (ISRO) con la correcta inserción del observatorio solar Aditya-L1 en...

View of last night’s @Starlink satellite deployment, including the first six with Direct to Cell capabilities pic.twitter.com/tjrWMJfqH4— SpaceX (@SpaceX) January 3, 2024 El primer lanzamiento de SpaceX de 2024 ha sido de un lote de 21 satélites Starlink, lo que ya casi...
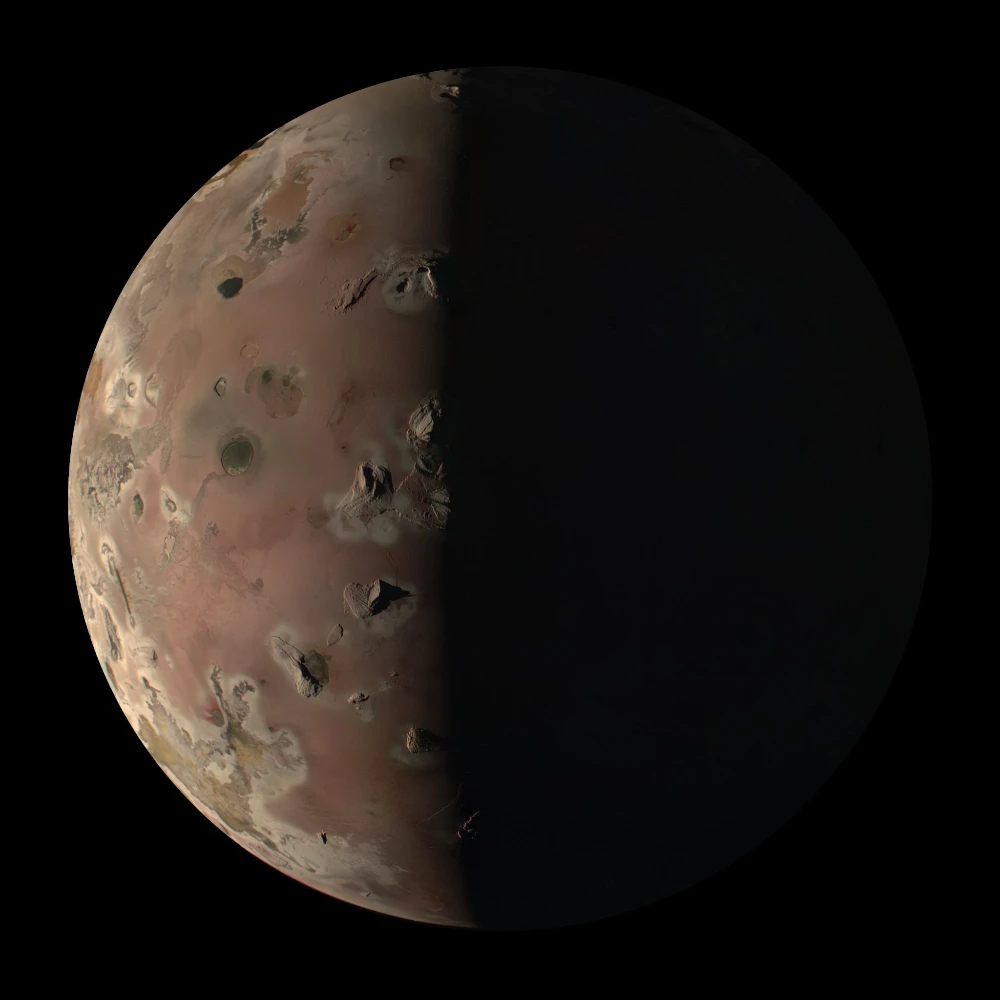
Juno a 2.500 kilómetros de distancia – NASA JPL / Southwest Research Institute / Kevin M. Gill El pasado 30 de diciembre la sonda Juno de la NASA hizo el sobrevuelo más cercano de Ío, la luna de Júpiter, en los últimos...

Despegue de la misión – ISRO A la 4:40, hora peninsular española (UTC +1) del 1 de enero de 2024 India inauguraba los lanzamientos espaciales del año con la puesta en órbita del observatorio de rayos X XSpoSat. El lanzamiento corrió a...

El primer lanzamiento espacial de 2023 fue la misión Transporter 6 de SpaceX – SpaceX Salvo sorpresas de última hora el lanzamiento de un satélite de pruebas de una constelación de acceso a Internet por parte de China a bordo de un...
Ministry of Space. Por Warren Ellis (guión); Chris Weston (ilustraciones); Laura Martin (color); Michael Heisler (rótulos). Image (2 de marzo de 2005). 94 páginas. Ministry of Space es una ucronía en la que al final de la Segunda Guerra Mundial es el...

La tripulación Skylab 4 y el árbol de Navidad que hicieron a partir de latas de comida vacías – NASA Según las fuentes que lo cuentan en los días posteriores al día de Navidad de 1973 la tripulación Skylab 4 llevó a...

Liftoff! pic.twitter.com/wTmY1h7ogp— SpaceX (@SpaceX) December 29, 2023 Hace unas horas un Falcon Heavy de SpaceX lanzaba con éxito el avión espacial X-37B de la Fuerza Espacial de los Estados Unidos (USSF). Es la séptima misión del X-37B en total, aunque es la...

El 23 de diciembre la primera etapa de Falcon 9 con el número de serie B1058 de SpaceX completaba su misión número 19, consiguiendo un nuevo récord de reutilizaciones. Y al terminar su misión aterrizaba en el espaciopuerto flotante Just Read...
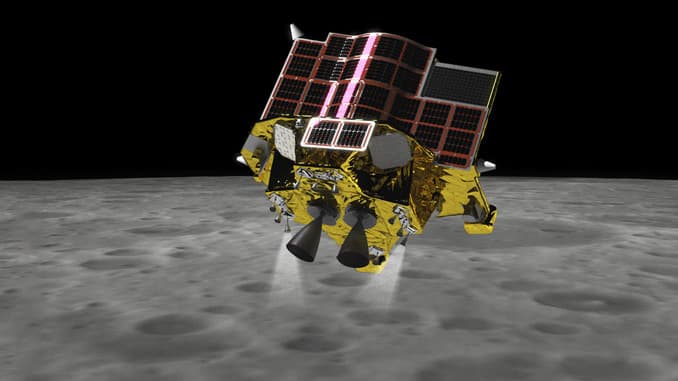
.@JAXA_en's Smart Lander for Investigating Moon (SLIM) will enter into orbit around the Moon today. (Merry Christmas!) It is designed to demonstrate accurate lunar landing techniques by a small explorer. This animation is in a rotating frame holding the Earth-Sun line stationary....

Falcon 9’s first stage has landed on the Just Read the Instructions droneship, completing the first 19th launch and landing of a booster pic.twitter.com/WoVx0R0Esj— SpaceX (@SpaceX) December 23, 2023 Esta pasada noche SpaceX utilizó la primera etapa B1058 en un Falcon 9...
Hace una horas la cápsula de carga Dragon 29 amerizaba en el Golfo de México frente a la costa de Florida poniendo fin a su misión. Había llegado a la Estación Espacial Internacional (EEI) el pasado 11 de noviembre con unos...
Vista parcial de uno de los KuiperSat en órbita – Amazon Rajeev Badyal, el jefe del proyecto, publicaba hace unos días una foto en la que se ve, aunque parcialmente, uno de los dos satélites de prueba de la constelación Kuiper de...

El primer Vulcan con sus dos etapas acopladas y la cofia protectora ya instalada – United Launch Alliance Desde hace unas horas el primer cohete Vulcan de United Launch Alliance (ULA) está listo para volar tras haber sido integradas su primera y...

Se me había pasado la vuelta al servicio del cohete Ceres-1 de la empresa china Galactic Energy tras su fallo del pasado 24 de octubre. El pasado día 5 despegaba sin problemas del Centro de lanzamiento de satélites de Jiquan para...

Blue Origin Acaba de lanzar con éxito la misión NS-24 de su cohete New Shepard. Este lanzamiento marca la vuelta al servicio del cohete tras el fallo del lanzamiento de la misión NS-23 en septiembre de 2022. Ese, por ahora, ha...

Una de las cargas útiles que lleva a bordo la sonda Psyche de la NASA es un sistema de comunicaciones mediante láser conocido como Deep Space Optical Communications (Comunicaciones ópticas de espacio profundo, DSOC). Y resulta que acaba de ser utilizado...

Encendido de prueba de un Ariane 6 de desarrollo en Kourou – ESA Según la actualización más reciente sobre el proceso para el primer lanzamiento de un Ariane 6 de las dos últimas pruebas llevadas a cabo una salió bien y otra...
Impresión artística del avión espacial chino – CASC Este pasado jueves, 14 de diciembre, China lanzaba por tercera vez su avión espacial reutilizable. Como en los dos lanzamientos anteriores el cohete encargado de ello ha sido un Larga marcha 2F y el...

Esta pasada noche Rocket Lab ha lanzado sin problemas la misión The Moon God Awakens [PDF] desde su complejo de lanzamiento 1 en Nueva Zelanda. El lanzamiento marca la vuelta al servicio del cohete Electrón tras su fallo del pasado mes...

#OTD in 2018, we witnessed a breathtaking scene from the cockpit of #VSSUnity, capturing a panoramic view of Southern California's Pacific coastline. This marked a historic moment as it was the inaugural flight of a crewed spaceship specifically designed to fly private...
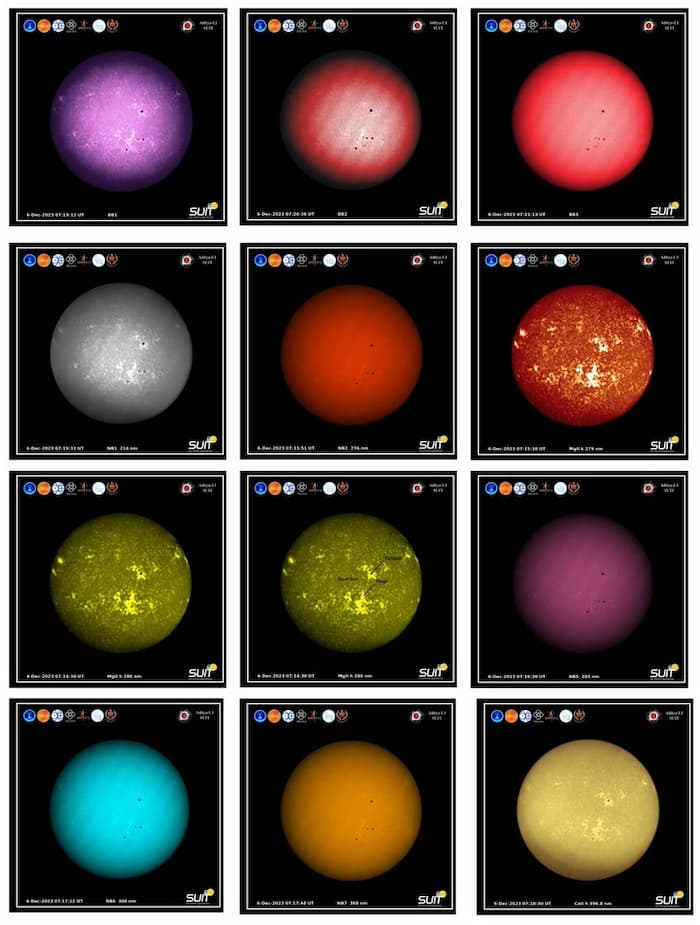
Primeras imágenes del Sol captadas por el observatorio Aditya-L1 – ISRO La Agencia India de Investigación Espacial (ISRO por sus siglas en inglés) acaba de hacer públicas las primeras imágenes obtenidas por el observatorio espacial solar Aditya-L1. Se trata de imágenes del...
Impresión artística de la Voyager 1 en el espacio intergaláctico – NASA-JPL/Caltech Según cuenta la NASA en Engineers Working to Resolve Issue With Voyager 1 Computer la Voyager 1 lleva días sin transmitir datos de sus instrumentos ni de telemetría. Lógicamente, están...

Aunque Aleš Svoboda resultó elegido como astronauta de reserva de la última promoción de la Agencia Espacial Europea su país, la República Checa, estaba negociando con Axiom Space incluirlo en la tripulación de la misión privada Axiom Ax-4. Con esto habría volado...

Fila superior, de izquierda a derecha: Sergey Krikalev, James Newman y Jerry Ross; fila inferior: Frederick Sturckow, Robert Cabana y Nancy Currie _ NASA Después de acoplar los módulos Zarya y Unity utilizando el brazo robot del transbordador espacial Endeavour y después...

Hace unas horas LandSpace ha lanzado su cohete Zhuque-2 propulsado por oxígeno y metano líquidos (metalox) por tercera vez. Era el tercer lanzamiento de un Zhuque-2. Y ha sido el primero de la historia en conseguir poner en órbita una carga...

La cápsula en tierra junto con el paracaídas principal – NASA/Keegan Barber El pasado 24 de septiembre la cápsula de la sonda OSIRIS-REx aterrizaba en el desierto de Utah con muestras del asteroide Bennu. No había visto nada raro en la maniobra...
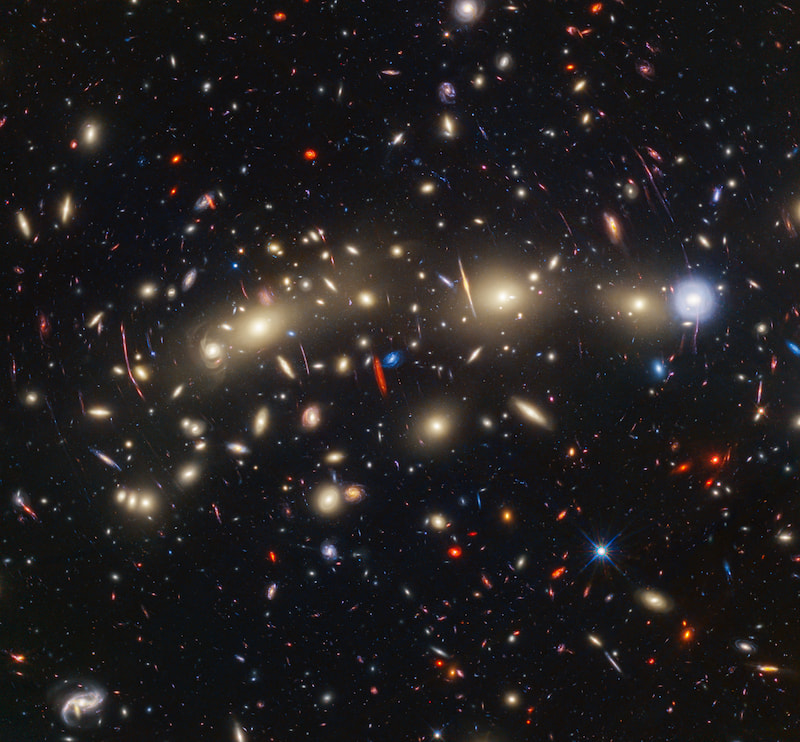
Cúmulo de galaxias MACS0416 – Imagen: NASA, ESA, CSA, STScI, J. Diego (Instituto de Física de Cantabria, Spain), J. D’Silva (U. Western Australia), A. Koekemoer (STScI), J. Summers & R. Windhorst (ASU) y H. Yan (U. Missouri). Esta preciosa imagen de uno...

Despegue del Endeavour con Unity a bordo – NASA Hoy se cumplen 25 años del despegue del transbordador espacial Endeavour en la misión STS-88, la primera misión de la flota de transbordadores espaciales dedicada a la construcción de la Estación Espacial Internacional...
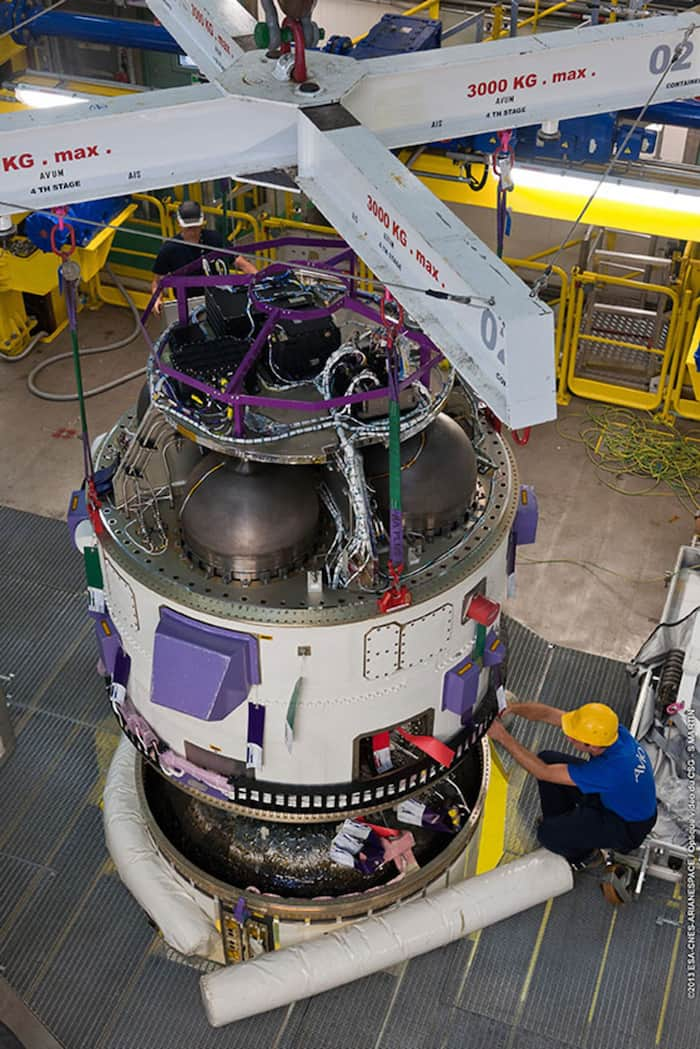
En una historia altamente WTF dos fuentes distintas han confirmado a European Spaceflight que Avio ha perdido dos de los depósitos de combustible del último cohete Vega disponible, lo que hace peligrar su lanzamiento. Esto pone aún peor la situación de Europa...

El viernes 1 de diciembre un Falcon 9 despegaba del Complejo de lanzamiento espacial 4 de la Base de la Fuerza Aérea de Vandenberg en California para poner en órbita el satélite espía surcoreano Project EO/IR Sat 1. Pero como el...

La estación espacial china vista desde la Shenzhou 16. Clic para ver en grande – CMSA Si no me equivoco esta y algunas otras más que han salido con ella es una de las primeras fotos hechas públicas por China de su...

Josef Aschbacher acaba de anunciar que el primer vuelo del Ariane 6 se producirá –si no se lía nada– entre el 15 de junio y el 31 de julio de 2024. Será un Ariane 62, lo que quiere decir que volará...

La Progress MS-23 al poco de su llegada a la EEI – NASA A primera hora de esta mañana la cápsula de carga Progress MS-23 se desacoplaba del módulo Poisk de la Estación Espacial Internacional (EEI) para hacer una reentrada controlada sobre...

Con la de años que llevamos contando cosas en esta cada hemos sacado ya unas cuantas visitas guiadas por la Estación Espacial Internacional. Pero esta con Frank Rubio, si no llevo mal las cuentas, es la primera en español. Y, con...

Replay of the #Ariane6 core stage hot-fire test. Watch the thruster nozzle moving. During a launch this movement would compensate for aerodynamic forces pushing Ariane 6 off course. Small changes, made automatically by the rocket’s avionics, will keep Ariane 6 heading to...
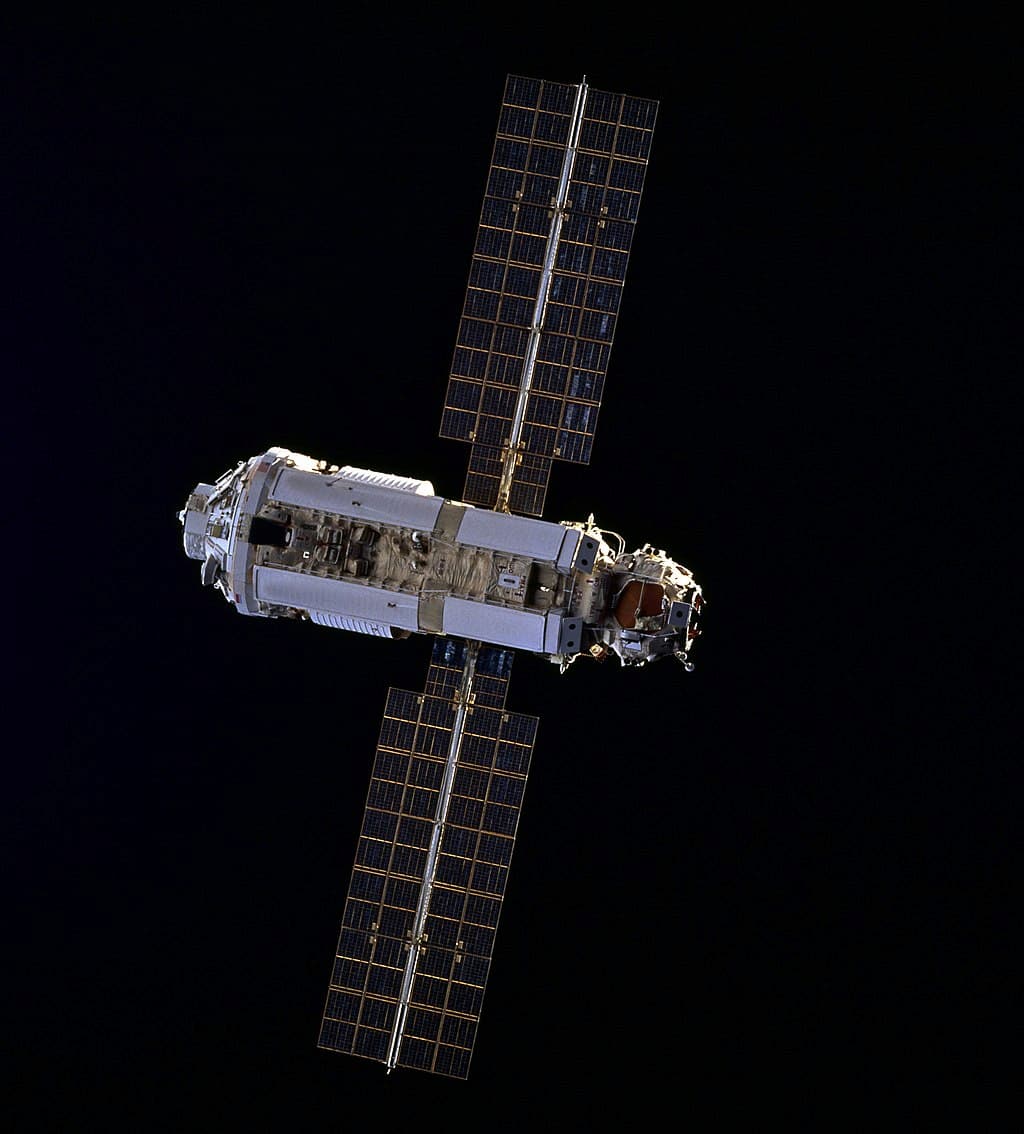
Zarya visto desde el Endeavour – NASA Hoy se cumplen 25 años del lanzamiento de Zarya, el primer módulo de la Estación Espacial Internacional, a bordo de un cohete Protón. Quedó en órbita a la espera de la llegada del módulo Unity...

Congratulations to the entire SpaceX team on an exciting second integrated flight test of Starship! Starship successfully lifted off under the power of all 33 Raptor engines on the Super Heavy Booster and made it through stage separation pic.twitter.com/JnCvLAJXPi— SpaceX (@SpaceX) November...

El segundo Starship completo listo para volar – SpaceX SpaceX ya tiene el permiso de la Administración Federal de Aviación de los Estados Unidos (FAA) para el lanzamiento del segundo Starship. La empresa en principio dijo que iba a intentarlo hoy mismo,...
Después de unas cuantas semanas diciendo que «launching soon» por fin está en línea NASA+, la plataforma de contenidos en streaming de la NASA. Está disponible de forma gratuita a través de las apps de la agencia para Android e iOS, para...
Impresión artística de los distintos elementos de la misión en la configuración propuesta en 2022 - NASA A finales de septiembre un comité de revisión independiente (Independent Review Board, IRB) analizó los planes de la NASA y la ESA para llevar a...

Liftoff! pic.twitter.com/5Jetaif7cI— SpaceX (@SpaceX) November 11, 2023 A última hora de la tarde del día 11 SpaceX lanzaba la misión compartida Transporter 9. Como su propio nombre indica es la novena de estas misiones en las que viajan cargas útiles de múltiples...

Liftoff! pic.twitter.com/iQ8DH6XoU8— SpaceX (@SpaceX) November 10, 2023 Tras ser lanzada en la madrugada del día 10 la cápsula de carga Dragon 29 acaba de atracar en el módulo Harmony de la Estación Espacial Internacional (EEI). Lleva a bordo unos 3.000 kilos de...
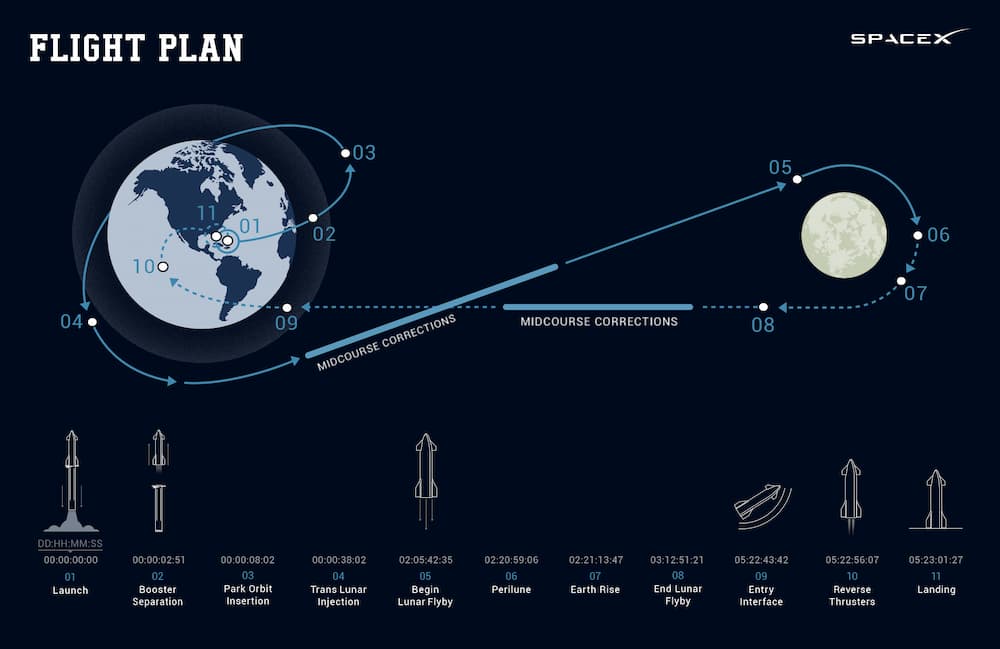
Para sorpresa de aproximadamente nadie que tenga un mínimo de idea del asunto el multimillonario japonés Yusaku Maezawa acaba de anunciar que la misión privada dearMoon alrededor de la Luna no despegará en 2023. Que necesitan más tiempo. Y que ya nos...
Nos escribió Roberto, un divulgador y apasionado de la astronomía y la astrofotografía que desde hace años recopila minuciosamente una guía llamada Turismo estelar. Allí se pueden encontrar decenas de alojamientos por toda España como casas rurales y hoteles con espectaculares...

Parte de la plantilla de Virgin Galactic el pasado mes de septiembre durante el día del trabajo en los Estados Unidos, que allí se celebra el primer lunes de septiembre – Virgin Galactic Ahora que estaba tomando carrerilla con una cadencia de...

Dinkinesh y familia fotografiados desde unos 1.600 kilómetros de distancia – NASA/Goddard/SwRI/Johns Hopkins APL Hace unos días las primeras imágenes que recibimos de la sonda Lucy de la NASA tras su sobrevuelo del asteroide Dinkinesh revelaron que lo acompaña otro asteroide que...

#Mars #Helicopter Sol 961: Navigation CameraNov. 3, 2023 (Sol 961 of the #Perseverance rover mission). This was the date of Ingenuity's 66th flight.https://t.co/OuUEATGOUS Image Credit: NASA/JPL-Caltech/j. Roger pic.twitter.com/uXcxp0lM2r— landru79 (@landru79) November 9, 2023 Ingenuity, el pequeño helicóptero que llegó a Marte con...

La Agencia Espacial Europea (ESA) acaba de presentar las primeras imágenes obtenidas por el telescopio espacial Euclid. El telescopio está aún en fase de prueba pero las imágenes ya son representativas de las que capturará cuando entre oficialmente en servicio a...
Los ministros del ramo de los países miembros de la Agencia Espacial Europea (ESA), reunidos en Sevilla en su encuentro bienal, han dicho que, entre otras cosas, que quieren que Europa recupere el lugar que le corresponde en el Espacio. Eso se...

Tenacity ya terminado, al menos según Sierra Space – Sierra Space Sierra Space anunciaba hace unos días que ha terminado de montar el primer Dream Chaser que irá al espacio. Aunque para ser precisos, y mientras no cambie de nombre de nuevo,...
Más allá. La asombrosa historia del primer humano que viajó al espacio. Por Stephen Walker. Capitán Swing Libros (9 de octubre de 2023). 629 páginas. Hoy sabemos, o podemos averiguarlo rápidamente en la Wikipedia, que el 12 de abril de 19612 Yuri...

Falcon 9’s first stage has landed on the A Shortfall of Gravitas droneship, completing the first 18th launch and landing of a booster pic.twitter.com/GIjqVFR4hc— SpaceX (@SpaceX) November 4, 2023 Esta pasada noche SpaceX lanzó un nuevo lote de satélites Starlink, lo que...
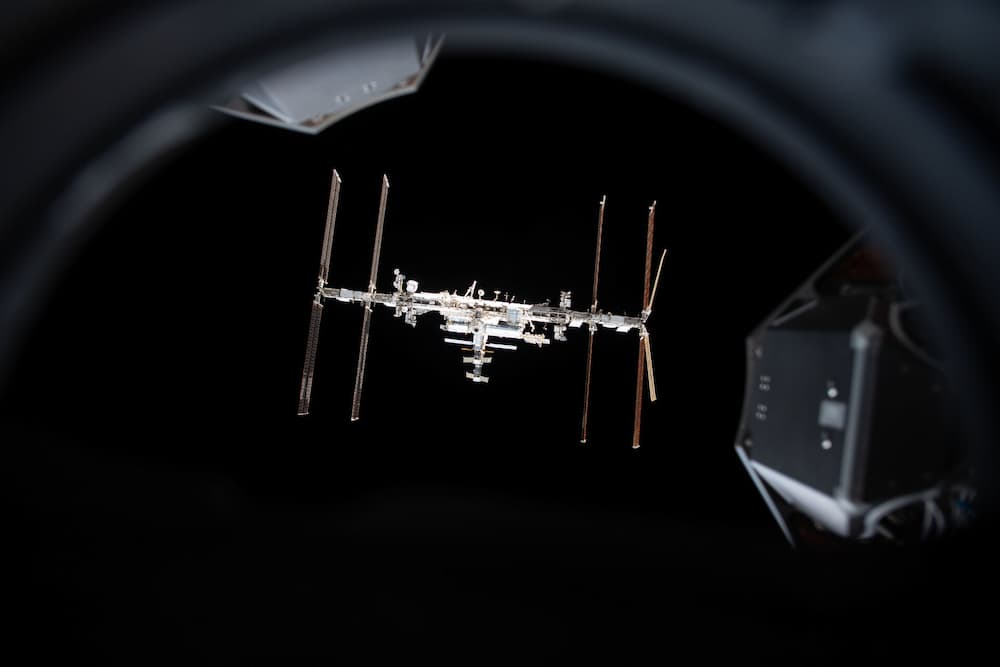
La EEI vista desde la Crew Dragon Endeavour a su partida de la misión Crew 2 en noviembre de 2021 – NASA Oficialmente la NASA y sus socios, con la excepción de Rusia, que sólo se ha comprometido hasta 2028, quieren mantener...
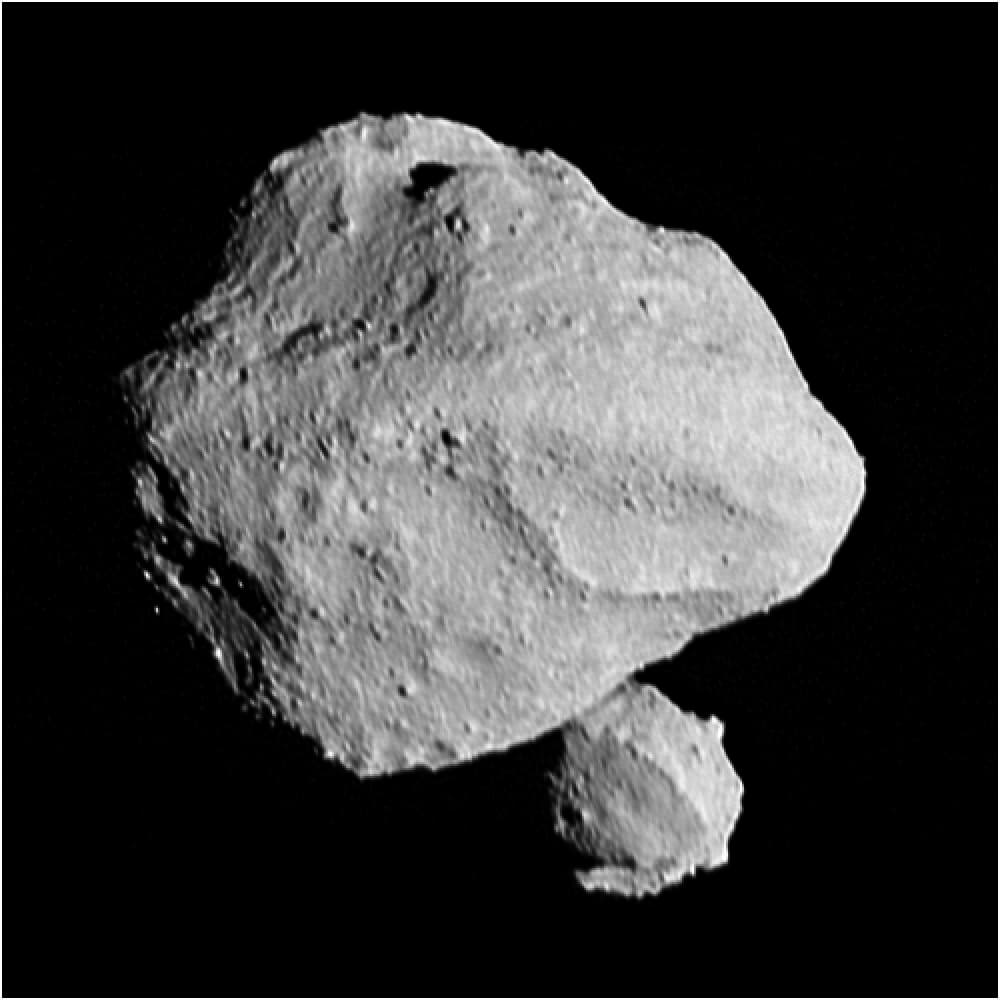
Dinkinesh y su luna vistos por Lucy – NASA/Goddard/SwRI/Johns Hopkins APL/NOAO El 1 de noviembre de 2023 la sonda Lucy de la NASA hizo un sobrevuelo del asteroide Dinkinesh. Las primeras imágenes recibidas han dado la sorpresa de que Dinkinesh es un...

Los suborbinautas de la misión Galactic 05 disfrutan de sus minutos en caída libre: Ketty Pucci-Sisti Maisonrouge a la izquierda; a su derecha Kellie Gerardi; al fondo Alan Stern – Virgin Galactic Esta tarde Virgin Galactic ha llevado a cabo con éxito...
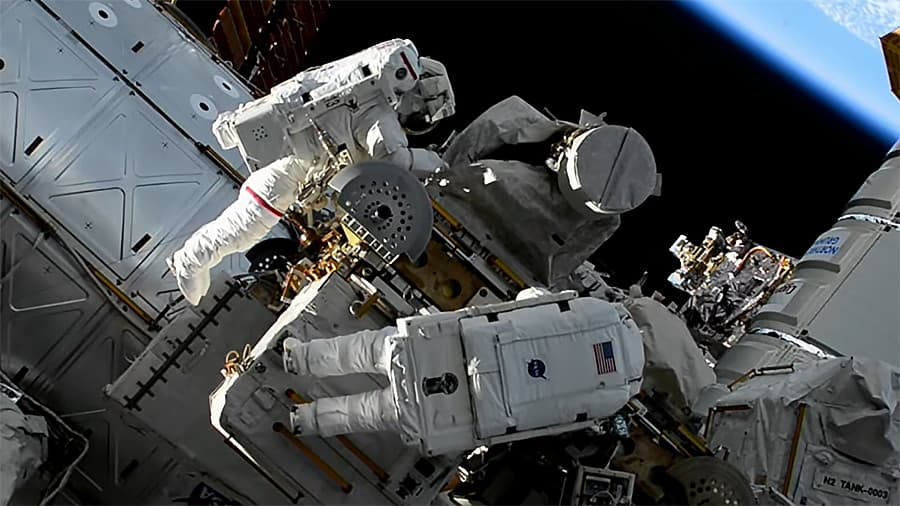
Las astronautas de la NASA Jasmin Moghbeli y Loral O'Hara llevaron a cabo un paseo espacial de mantenimiento en la Estación Espacial Internacional (EEI) en la tarde del 1 de noviembre de 2023. Denominado oficialmente US EVA-89 los objetivos principales del...

Esta tarde a las 17:54 la sonda Lucy de la NASA ha hecho su máxima aproximación al asteroide Dinkinesh. La distancia mínima que los separó fue de 425 kilómetros. La velocidad de la sonda era de 16.200 kilómetros por hora. El...

Vehicle is ready for the second test flight of a fully integrated Starship, pending regulatory approval pic.twitter.com/9tC4yKecmw— SpaceX (@SpaceX) October 25, 2023 En un comunicado enviado ayer a los medios la Administración Federal de Aviación (FAA) de los Estados Unidos decía haber...
Este vídeo muestra unos 50 segundos en timelapse del reciente eclipse solar anular de 2023 que tuvo lugar el 14 de octubre. Es obra de Jason Kurt, un fotógrafo especializado en astrofotografía y fotografía en infrarrojos. Está fotografiado a 8K, que...
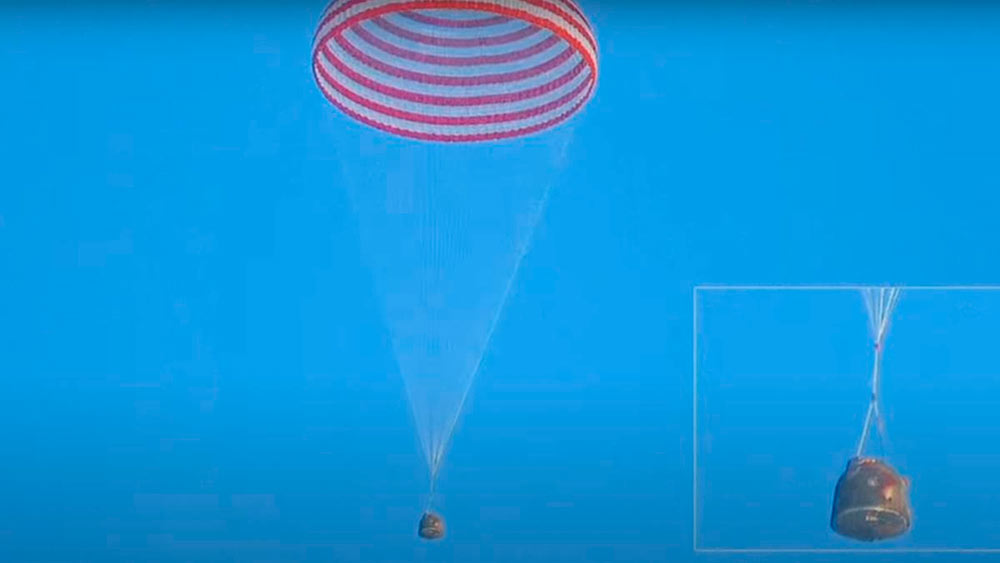
Watch the #breathtaking photos of #Shenzhou16’s journey back to Earth!These images were taken by some Chinese astrophotography enthusiasts earlier this morning.(Photo Credit: @一瞬流光的瞬/Lian Zhen/Zhang Jingyi/ Liu Boyang) pic.twitter.com/KXAQB9mXPy— Wu Lei (@wulei2020) October 31, 2023 Esta pasada noche la cápsula tripulada china Shenzhou...

Tapa del TAGSAM con sus tornillos – NASA/Erika Blumenfeld & Joseph Aebersold El pasado 24 de septiembre la cápsula que contiene las muestras del asteroide Bennu que recogió la sonda OSIRIS-REx aterrizaba sin problemas en el desierto de Utah. De allí fue...

Tal día como hoy de 1998 despegaba la misión STS-95 de la NASA. Era la número 25 del transbordador espacial Discovery y la número 92 del programa de los transbordadores espaciales de la agencia. Pero, salvo quizás la primera misión del...

Ignition! China's Shenzhou-17 manned spaceship blasts off #SpaceChina pic.twitter.com/G2Pk9epANL— CGTN (@CGTNOfficial) October 26, 2023 China ha enviado hoy una nueva tripulación a su estación espacial. Tang Hongbo, Tang Shengjie y Jiang Xinlin viajaron hacia su destino a bordo de la cápsula Shenzhou...

Kononenko y Chub trabajando con la antena del radar –el rectángulo naranja– del experimento Napor-miniRSA – NASA TV Esta pasada noche Oleg Kononenko y Nikolai Chub llevaron a cabo un paseo espacial en el segmento ruso de la Estación Espacial Internacional (EEI)....
Impresión artística de la Voyager 1 en el espacio intergaláctico – NASA-JPL/Caltech Lanzadas en 1977 para una misión de cinco años, las sondas Voyager de la NASA siguen en funcionamiento aún hoy en día, dándolo todo. O al menos todo lo que...

Hazegrayart ha publicado estos días un vídeo acerca del Albatros, el descabellado avión espacial soviético que iba a despegar desde el agua sobre un hidroala. Descabellado porque el hidroala tendría que haber alcanzado una velocidad cercana a los 200 kilómetros y...

Finally here's the ON BOARD VIDEO from yesterday's TV-D1 mission! #ISRO #Gaganyaanpic.twitter.com/U9Er66zCbc— ISRO Spaceflight (@ISROSpaceflight) October 22, 2023 Esta mañana la ISRO (Indian Space Research Organisation, Agencia India de Investigación Espacial, la NASA india) probó con éxito por primera vez el sistema...

Esta mañana Ezequiel Sánchez, Raúl Torres y Raúl Verdú dieron una rueda de prensa en la que hablaron de los resultados del lanzamiento del Miura 1 y de cómo ven el futuro de la empresa. Aunque creo que para mí el...
Impresión artística del despegue de un Ariane 6 – ESA Hoy se han hecho públicas las decisiones del Consejo de la Agencia Espacial Europea (ESA) respecto al calendario de pruebas del Ariane 6, que ha sido convenientemente actualizado. Aunque la agencia todavía...

La segunda etapa del Vega-C durante el ensamblado del cohete – Arianespace El julio de 2022 la Agencia Espacial Europea (ESA) llevaba a cabo sin problemas el primer lanzamiento, aún considerado de pruebas, de un cohete Vega-C, la versión mejorada del Vega....
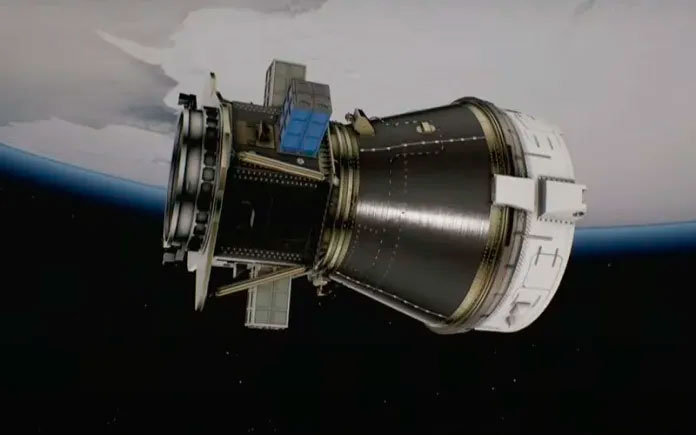
Impresión artística del dispensador de satélites del Vega en órbita – Arianespace [Léase esta anotación escuchando Alive and Kicking de Simple Minds] En las últimas horas ha saltado la noticia de que dos de los satélites puestos en órbita en el lanzamiento...
Una Starliner a su llegada a la Estación Espacial Internacional en su misión de prueba no tripulada en mayo de 2022 – NASA La NASA publicaba hace unos días una actualización de la planificación para las próximas misiones del programa de tripulaciones...

Un Falcon Heavy de SpaceX acaba de lanzar, por fin, la misión Psyche de la NASA rumbo al asteroide del mismo nombre. El lanzamiento llega con un año de retraso porque en 2022 el software de a bordo no estaba listo...

El pasado día 6 Virgin Galactic llevaba a cabo con éxito el quinto lanzamiento de su avión cohete VSS Unity en otros tantos meses. Es el cuarto vuelo en el que iban a bordo «suborbinautas»¹ de pago. La misión Galactic 04...
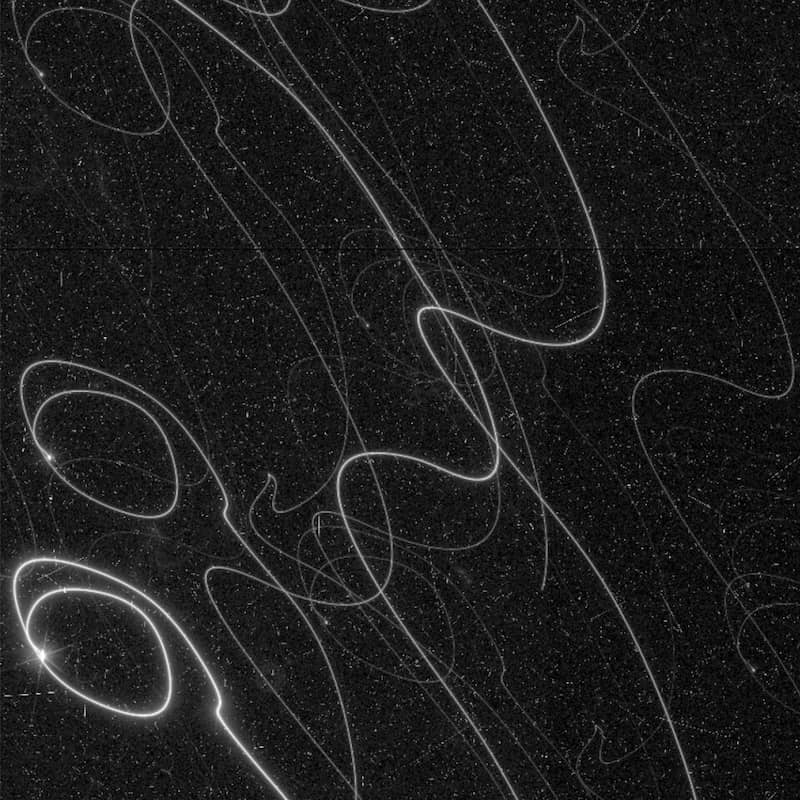
Esto es lo que veía Euclid durante los peores momentos – ESA La Agencia Espacial Europea (ESA) y los contratistas del observatorio espacial Euclid han conseguido solucionar el problema con el sistema de guiado fino (FGS) del observatorio que hacía que a...
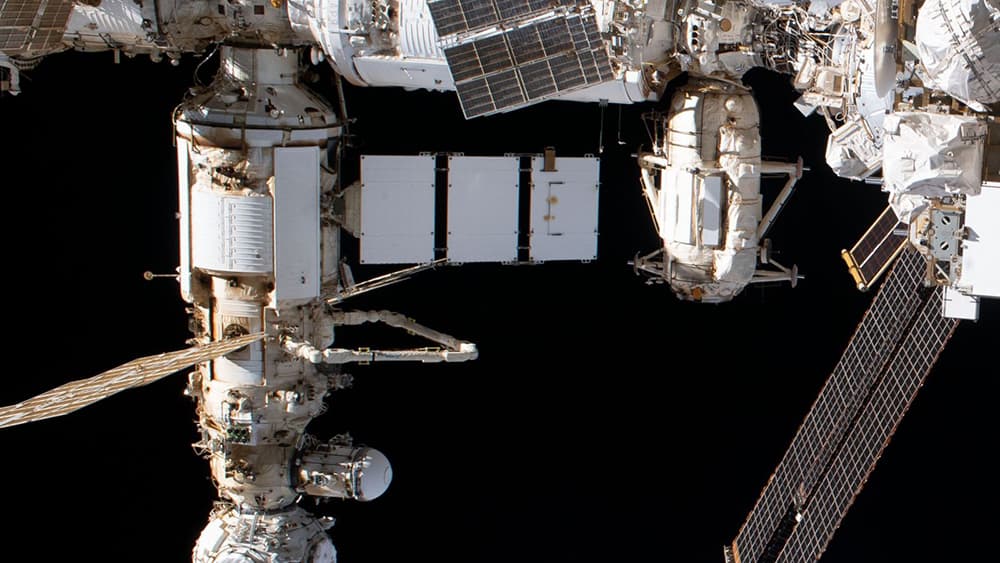
La fuga parece estar en el radiador extra de Nauka, formado por los tres paneles rectangulares que se ven en el centro de la imagen – NASA [Anotación en actualización] Según anunciaba Roscosmos en su canal de Telegram el radiador externo del...

La misión VV23 del cohete Vega de la Agencia Espacial Europea (ESA) despegaba con éxito en la noche del 8 al 9 de octubre de 2023, aunque a la hora de publicar esta anotación falta la confirmación del despliegue de dos...

Hace unos minutos la empresa española PLD Space lanzaba por primera vez su cohete Miura 1. No sólo ha librado la plataforma de lanzamiento sin dañarla en absoluto y ha superado la fase de máxima presión dinámica sino que además ha...

Hace unas horas el último Atlas V en su variante 501 ponía en órbita los KuiperSat-1 y KuiperSat-2, dos satélites de prueba del Proyecto Kuiper, su versión de Starlink. Los ha dejado en una órbita de 500 kilómetros de altitud con...

PLD Space está trabajando ahora mismo en el tercer intento de lanzamiento de su cohete Miura 1. Si todo va según lo previsto, aunque es casi seguro que se producirá algún retraso, el despegue se producirá a las 2:00 (hora peninsular...
Erik Wernquist ha publicado esta minipeliculita titulada Una revolución por minuto creada con imágenes 3D y música de Cristian Sandquist imaginando cómo sería una límpida estación espacial al estilo de un hotel «retro» para visitantes y viajeros espaciales. La estación espacial...
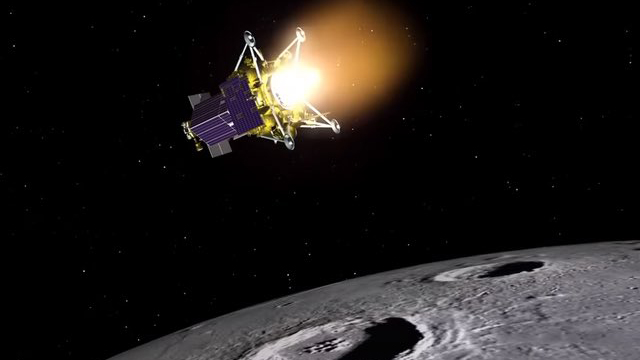
Impresión artística de la Luna 25 frenando – Roscosmos Según se puede leer en el canal de Telegram de Roscosmos (gracias, DeepL) la comisión encargada de investigar por qué la sonda Luna 25 terminó estrellada contra la Luna ya ha emitido su...

El Miura 1 durante el intento de lanzamiento abortado del 17 de junio – PLD Space Según cuenta PLD Space en Arranca la campaña de lanzamiento de MIURA 1 todo está listo en el Centro de Experimentación de El Arenosillo (CEDEA) del...
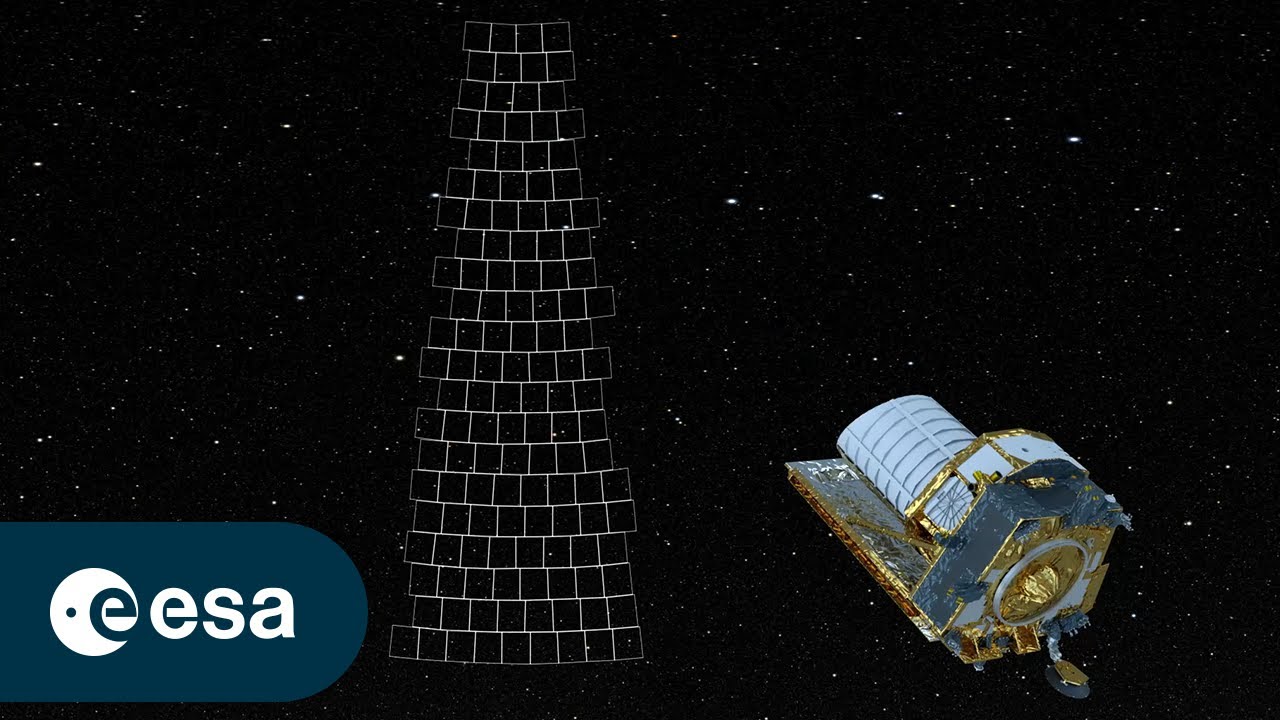
Aunque ya hemos recibido algunas imágenes de prueba que prometen resultados espectaculares la Agencia Espacial Europea (ESA) se ha visto obligada a prolongar la puesta en marcha del observatorio espacial Euclid a causa de tres problemas. Estos son que el sensor...

Me ha gustado esta pieza de The Overview Effect dedicada a la ubicación de los mundos de Star Trek y otra ciencia-ficción en el espacio, que aunque tiene un aspecto galáctico por su comienzo está más bien concentrada en las cercanías...

Un aterrizaje poco después de la una de la tarde ponía fin a la misión de la cápsula tripulada Soyuz MS-23, que volvía a tierra con la tripulación de la Soyuz MS-22 después de que esta última fuera declarada como no...

The key to the International @Space_Station has been handed over to ESA astronaut @Astro_Andreas, we now have a European commander. Let's take a look back at his time in space so far https://t.co/RnMtJmp6ms pic.twitter.com/WASRA9fZBf— ESA (@esa) September 26, 2023 Unas horas antes...

El Ariane 6 durante el encendido corto de su primera etapa – ESA/CNES/Arianespace/ArianeGroup – Optique vidéo du CSG/S.Martin Dentro de la campaña de pruebas destinada a conseguir hacer el primer lanzamiento del Ariane 6 uno de los pasos es hacer un encendido...

We've spotted the #OSIRISREx capsule on the ground, the parachute has separated, and the helicopters are arriving at the site. We're ready to recover that sample! pic.twitter.com/ZmPyb8fyrR— NASA Solar System (@NASASolarSystem) September 24, 2023 [Anotación en actualización] El aterrizaje esta tarde de...

La Agencia India de Investigación Espacial (ISRO) calculaba que entre ayer y hoy las condiciones de iluminación en el entorno del cráter Manzinus U, dónde están el rover Pragyan y el aterrizador Vikram de la misión Chadrayaan 3, podrían haberles permitido...

Hot staging ring removed from Booster 9. An interesting turn of events.https://t.co/e3xbqPnwZ5 pic.twitter.com/xXwyhzp9UG— Chris Bergin - NSF (@NASASpaceflight) September 21, 2023 El pasado 6 de septiembre Elon Musk tuiteó diciendo que SpaceX estaba lista para el segundo intento de lanzamiento del Starship....

Welcome aboard Canopée! You'll be sailing with us for this first voyage between continental Europe and Kourou using its sails! Who would like to come with us on the next trip with Ariane 6 on board?#ArianeGroup #Ariane6 @esa @Arianespace pic.twitter.com/wHPBW2VNaZ— ArianeGroup (@ArianeGroup)...

Falcon 9’s first stage has landed on the A Shortfall of Gravitas droneship, completing the first 17th launch and landing of a booster pic.twitter.com/DFCw43FoVw— SpaceX (@SpaceX) September 20, 2023 Esta pasada noche un Falcon 9 de SpaceX ponía en órbita con éxito...

Hace unos minutos Rocket Lab ha sufrido el cuarto fallo de un cohete Electrón desde que este empezara a volar en mayo de 2017. La misión We Will Never Desert You llevaba a bordo el segundo de los satélites SAR Acadia...

El pasado viernes un cohete Soyuz-2.1a despegaba desde el Cosmódromo de Baikonur para poner en órbita la cápsula tripulada Soyuz MS-24, que tres horas y nueve minutos después se acoplaba al módulo Rassvet de la Estación Espacial Internacional. A bordo de...

La tripulación de la misión frente a la primera etapa de un Falcon 9, quizás la que los va a lanzar al espacio. De izquierda a derecha Marcus Wandt, Walter Villadei, Michael López-Alegría y Alper Gezeravcı – Axiom Space No era ningún...

Frank Rubio en la Cúpula de la EEI – NASA El 11 de septiembre de 2023 el astronauta de la NASA alcanzaba la cifra de 355 días seguidos en el espacio. Eso, aunque haya sido por accidente, le permitía batir el récord...

Cometa C/2023 P1 Nishumura el 6 de septiembre de 2023 / Foto (CC) PJ Singh. El astrónomo aficionado japonés Hideo Nishimura descubrió el cometa C/2023 P1 con una cámara digital la noche del 11-12 de agosto pasado; ahora el objeto interestelar ya...

Impresión artística de un carguero Tianzhou en órbita - CASC Esta pasada madrugada el carguero espacial chino Tianzhou 5 terminaba su misión con una reentrada controlada sobre el Pacífico. A bordo llevaba materiales de desecho y ya no necesarios a bordo de...

MOXIE durante su instalación en Perseverance – NASA/JPL-Caltech El pasado 7 de agosto el experimento MOXIE del rover Perseverance funcionaba por decimosexta y última vez, generando 9,8 gramos de oxígeno a partir de la atmósfera de Marte. MOXIE, de Mars Oxygen In-Situ...

Despegue del primer Starship – SpaceX Después de que SpaceX dijera que está lista para un nuevo lanzamiento del Starship a expensas del permiso de la Administración Federal de Aviación de los Estados Unidos (FAA) la agencia estatal por fin se ha...

Virgin Galactic ha llevado hoy en un vuelo suborbital a bordo del avión cohete VSS Unity a tres de sus clientes que habían comprado sus billetes allá por 2005. Como para luego quejarnos de los retrasos de las aerolíneas. Es el...
Me encontré referenciado por ahí Project Mars, una rareza que resulta ser una novela del mismísimo Wernher von Braun, con el apropiado subtítulo de «un cuento técnico». Está disponible en varios formatos, escaneado con calidad desde la novela en papel original,...

El jefe del EAC Frank De Winne y el astronauta de la ESA Alexander Gerst (de rojo) dan la bienvenida a Sławosz Uznański (de blanco) en su primer día en el Centro Europeo de Astronautas de la ESA – ESA El astronauta...
Fully stacked Starship on the launch pad at Starbase pic.twitter.com/cebFZEVrJZ— SpaceX (@SpaceX) September 6, 2023 Desde ayer SpaceX tiene ya apilados el Booster B9 y la segunda etapa Starship 25 que juntos forman el Starship que quiere utilizar para el segundo intento...

Despegue de la misión – MHI Launch Services Después de tener que cancelar un primer intento el pasado 28 de agosto por la presencia de vientos demasiado fuertes en altura hace unas horas un cohete H-2A despegaba del espaciopuerto de Tanegashima y...

Straight to ignition! Teams from @esa, @CNES and @ArianeGroup worked many hours to get #Ariane6 fuelled up to start the Vulcain 2.1 engine – but we cut straight to ignition for instant satisfaction. Full video and download: https://t.co/WD9aypKG31 pic.twitter.com/MO3BOtKYE3— ESA Space Transport...

Esta pasado noche SpaceX ha puesto en órbita un nuevo lote de 21 satélites Starlink. No sería casi noticia de no ser porque este es el lanzamiento número 62 del año de la empresa, lo que bate su récord de 61...

Chandrayaan-3 Mission:Vikram soft-landed on , again!Vikram Lander exceeded its mission objectives. It successfully underwent a hop experiment.On command, it fired the engines, elevated itself by about 40 cm as expected and landed safely at a distance of 30 – 40 cm away.…...

Welcome home, #Crew6!After six months of science and discovery aboard the @Space_Station, our Crew-6 team splashed down at 12:17am ET (0417 UTC) and will be picked up shortly by recovery teams. pic.twitter.com/zf635dfUKF— NASA (@NASA) September 4, 2023 Poco después de las seis...
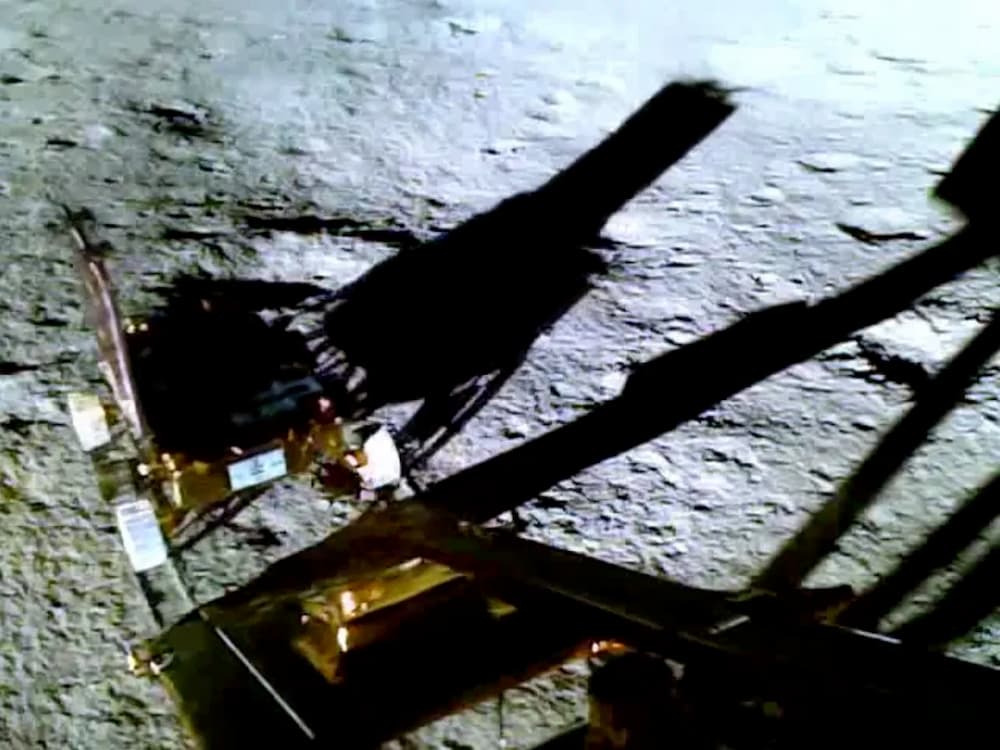
Pragyan en el momento de pisar la Luna – ISRO El rover Pragyan y el aterrizador Vikram de la misión Chandrayaan-3, funcionan con la electricidad que producen sus paneles solares. Y como está a punto de anochecer sobre su zona de aterrizaje...

Un cohete PSLV-XL lanzado desde el Centro Espacial Satish Dhawan ha puesto en órbita hace unas horas el observatorio solar Aditya-L1. Es la primera vez que la India lanza una misión de este tipo. El cohete ha dejado el observatorio en...

Tal y como estaba previsto dentro del programa de pruebas más recientemente publicado que debe llevar al primer lanzamiento del Ariane 6 la ESA hizo esta mañana un encendido de la segunda etapa del cohete en las instalaciones de la DLR...
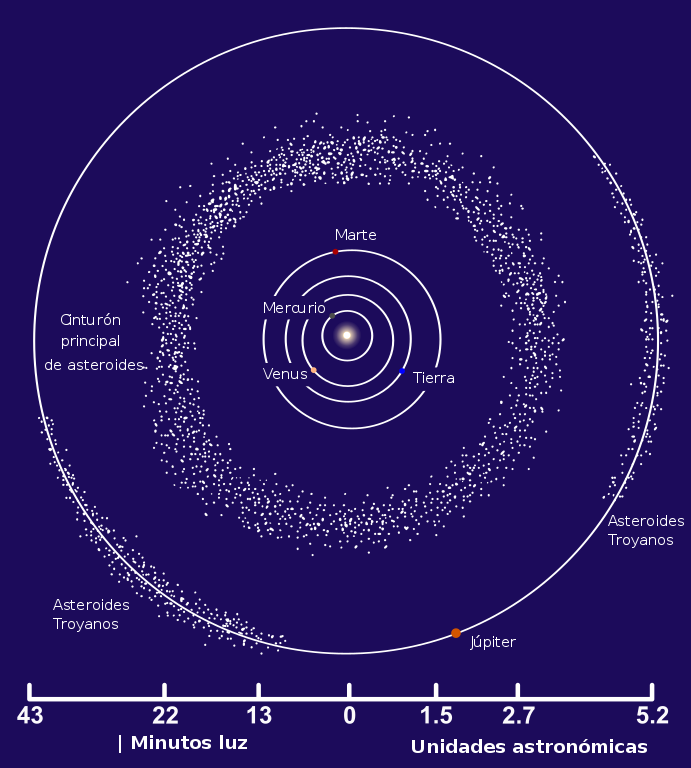
El cinturón de asteroides del Sistema Solar está lleno de pequeños cuerpos rocosos que no pudieron en su día formar un planeta. Sin embargo, cuando los vemos representados en imágenes bidimensionales o en películas parecen muy grandes e impenetrables, como si...
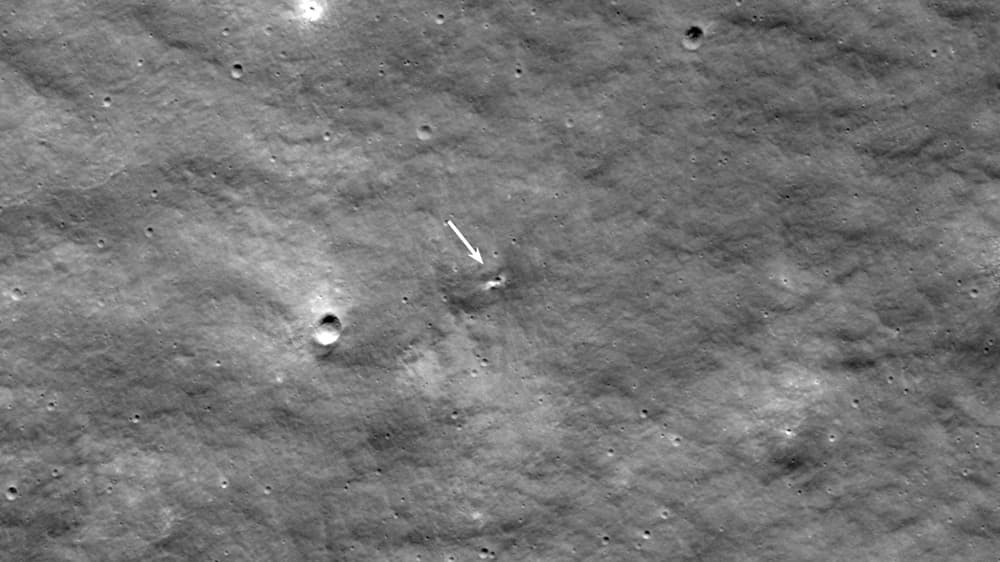
La Lunar Reconnaissance Orbiter (LRO) de la NASA ha fotografiado un cráter nuevo sobre la superficie de la Luna que está en la zona en la que Roscosmos estima que se estrelló la Luna 25. Es cierto que la LRO no...

Si todo va según lo previsto el próximo día 24 la cápsula de la sonda OSIRIS-REx que contiene muestras del asteroide Bennu aterrizará en el Campo de pruebas de Utah descendiendo suavemente colgada de un paracaídas. Recientemente el equipo de la...

Microsiervos viajará a Júpiter La NASA está ultimando los detalles para lanzar la Europa Clipper rumbo a Júpiter. Pero aún estás a tiempo de enviar tu nombre a la NASA para que sea grabado en relieve en la sonda antes de que...
Beyond Borders, Across Moonscapes:India's Majesty knows no bounds!. Once more, co-traveller Pragyan captures Vikram in a Snap! This iconic snap was taken today around 11 am IST from about 15 m.The data from the NavCams is processed by SAC/ISRO, Ahmedabad. pic.twitter.com/n0yvXenfdm— ISRO...

El Ariane 6 de pruebas en la plataforma de lanzamiento – ESA/CNES/ArianeSpace-ArianeGroup/Optigue vidéo du CSG/S. Martin Dentro del programa de pruebas para el primer lanzamiento de un Ariane 6 que la Agencia Espacial Europea (ESA) había anunciado estaba un encendido estático corto...

Hear from the #Crew7 quartet as the Expedition 69 crew welcomes them aboard the orbiting laboratory. pic.twitter.com/q7aS96J955— International Space Station (@Space_Station) August 27, 2023 Hace unos momentos que la tripulación Crew-7 abandonaba la Crew Dragon Endurance para entrar la Estación Espacial Internacional...

SpaceX acaba de lanzar la tripulación Crew-7 a bordo de la Crew Dragon Endurance rumbo a la Estación Espacial Internacional (EEI). Está previsto que atraquen en ella el domingo 27 a las 14:39, hora peninsular española (UTC +2) del domingo 27....

pic.twitter.com/jvAFyiDF9E— SpaceX (@SpaceX) August 25, 2023 Hace unas horas SpaceX hizo una segunda prueba de encendido estático del Booster B9 que será la primera etapa del próximo Starship que lance. A diferencia de la prueba anterior, que se cortó antes de tiempo,...

Pragyan (Sabiduría), el rover de la misión india Chandrayaan 3 ya rueda sobre la luna. De hecho ya se ha desplazado unos ocho metros. Salió de Vikram (Valor), el aterrizador, algo más de cuatro horas después del alunizaje porque antes era...

Tal y como estaba previsto esta pasada noche la cápsula de carga Progress MS-24 se acoplaba de forma automática al módulo Zvezda de la Estación Espacial Internacional. La cápsula lleva a bordo cerca de 2.500 kilos de carga, que se reparten...

Rocket Lab ha lanzado con éxito hace unas horas la misión We Love The Nightlife desde su Complejo de Lanzamiento 1 en Nueva Zelanda. En ella un cohete Electrón ha puesto en órbita un satélite de obtención de imágenes mediante radar...

Here is how the Lander Imager Camera captured the moon's image just prior to touchdown. pic.twitter.com/PseUAxAB6G— ISRO (@isro) August 24, 2023 Tal y como estaba previsto a las 14:34, hora peninsular española (UTC +2), del 23 de agosto de 2023, la sonda...

Esta mañana ha sido lanzada la cápsula de carga Progress MS-24 –a la que la NASA llama Progress 85– rumbo a la Estación Espacial Internacional (EEI). Está previsto que atraque automáticamente en el puerto posterior del módulo Zvezda de la Estación...

Hace unas horas la cápsula de carga Progress MS-22 terminaba su misión desintegrándose en la atmósfera en una reentrada controlada. A bordo llevaba material de desecho y ya no necesario a bordo de la Estación Espacial Internacional (EEI). Su trayectoria estaba...

Chandrayaan-3 Mission:The Lander Module (LM) health is normal.LM successfully underwent a deboosting operation that reduced its orbit to 113 km x 157 km.The second deboosting operation is scheduled for August 20, 2023, around 0200 Hrs. IST #Chandrayaan_3#Ch3 pic.twitter.com/0PVxV8Gw5z— ISRO (@isro) August 18,...
Impresión artística de la Luna 25 frenando – Roscosmos A eso de las 14:00, hora peninsular española (UTC +2) del sábado 19 de agosto de 2023 Roscosmos perdía el contacto con la sonda Luna 25. Algo menos de 24 horas después acaban...
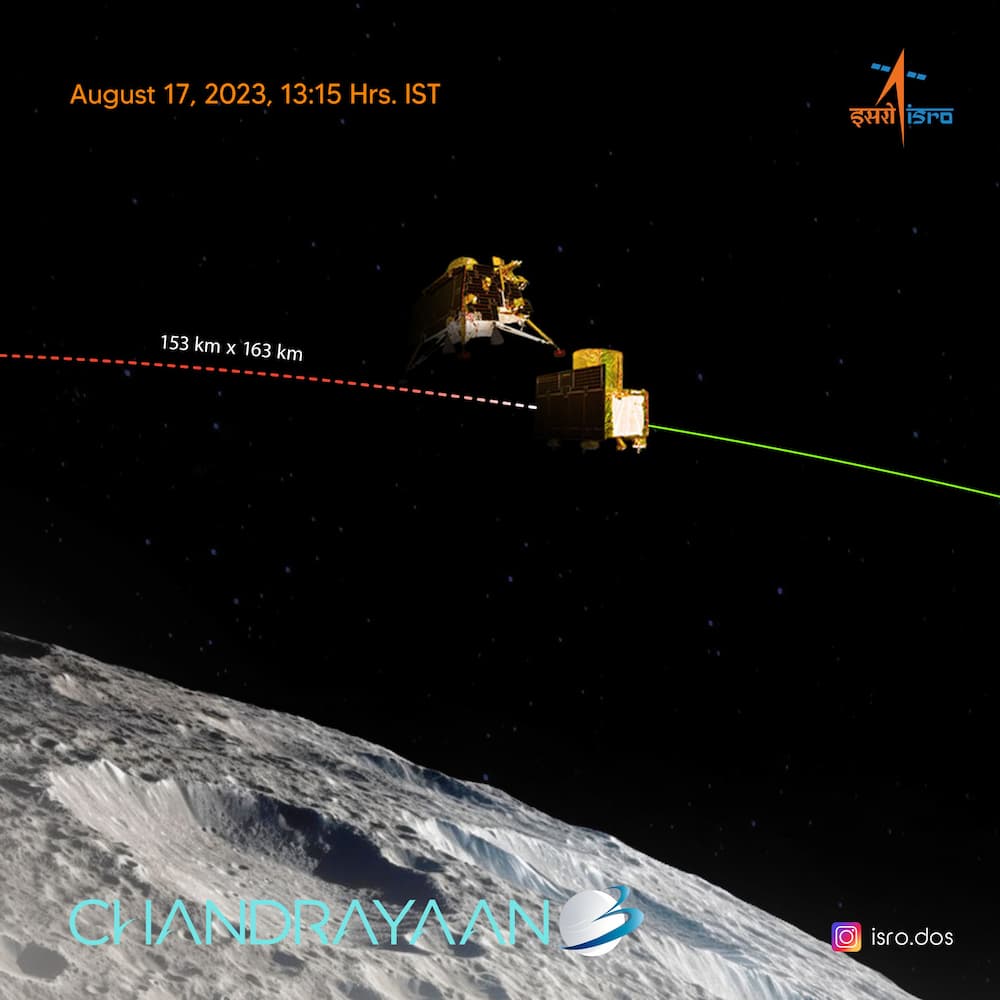
Chandrayaan-3 Mission:‘Thanks for the ride, mate! said the Lander Module (LM).LM is successfully separated from the Propulsion Module (PM)LM is set to descend to a slightly lower orbit upon a deboosting planned for tomorrow around 1600 Hrs., IST.Now, pic.twitter.com/rJKkPSr6Ct— ISRO (@isro) August...
Despegue del primer Starship – SpaceX Según cuenta Payload, SpaceX ha entregado a la Administración Federal de Aviación de los Estados Unidos (FAA) su informe sobre el fallo del primer lanzamiento del Starship. Es un paso sin el que la empresa no...
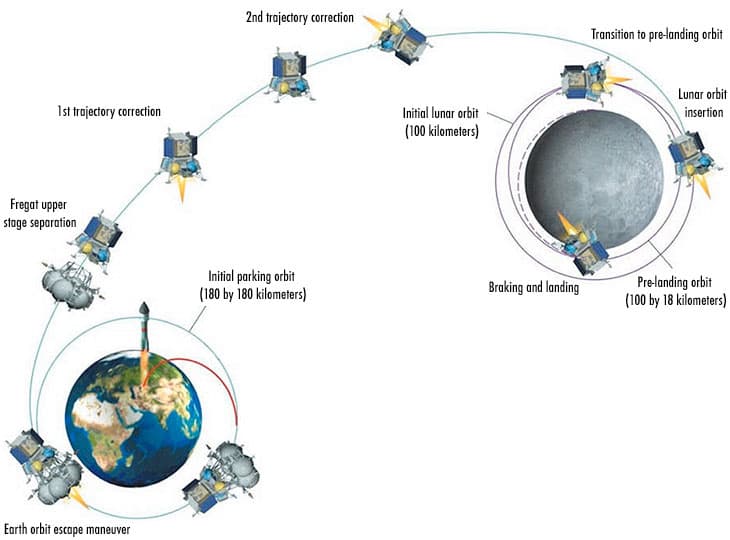
Fases de vuelo de la misión – NPO Lavochkin Roscosmos acaba de confirmar en su canal de Telegram que la sonda Luna 25 está en órbita alrededor de la Luna tras ejecutar la maniobra de frenado necesaria para que la gravedad de...
Viajes interestelares. Historia de las sondas Voyager. Por Pedro León. Guadalmazán (11 julio de 2023). 430 páginas. En el momento de publicar esta anotación la sonda Voyager 1 está a algo más de 24.000 millones de kilómetros de la Tierra mientras que...
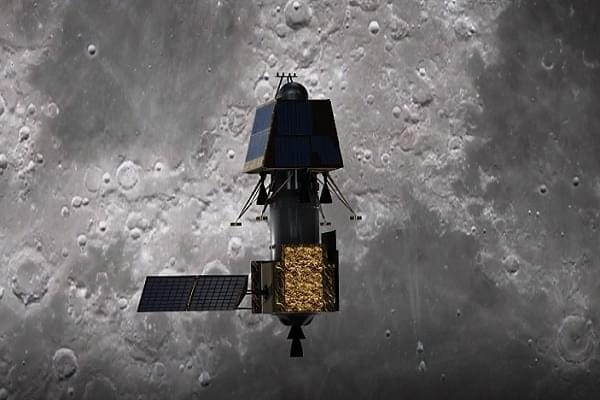
Impresión artística de la sonda aún unida a la unidad de propulsión en órbita alrededor de la Luna – ISRO Esta madrugada a las 5 de la mañana, hora peninsular española (UTC +2) la sonda india Chandrayaan 3 encendía el motor de...
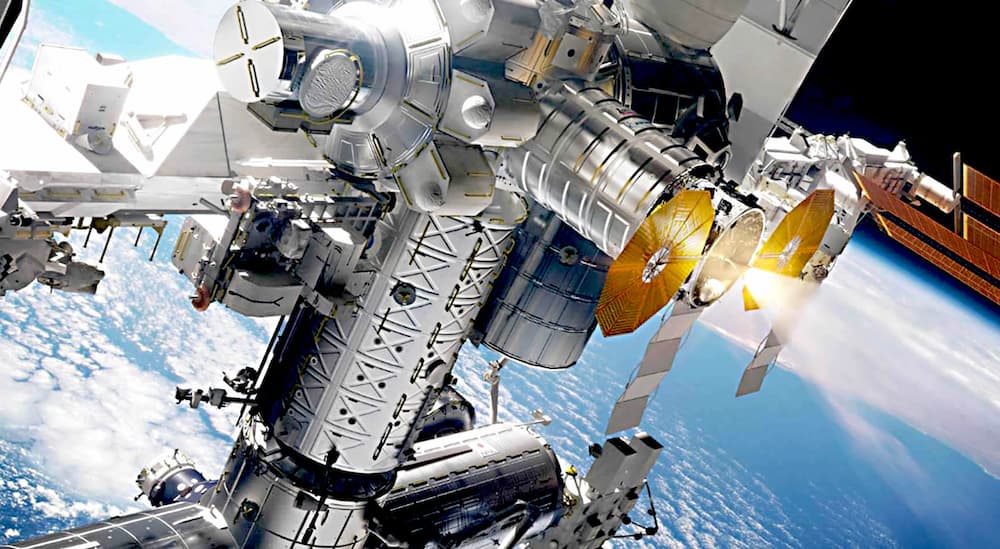
Impresión artística de una Cygnus subiendo la órbita de la Estación Espacial Internacional – Glenn Research Center/NASA El pasado día 11 la cápsula de carga Cygnus 19 fue utilizada para subir la órbita de la Estación Espacial Internacional. Para ello la EEI...

Despegue de la misión – Roscosmos Esta pasada noche un cohete Soyuz 2b despegaba de la plataforma 1S del cosmódromo de Vostochny para poner en órbita la sonda Luna 25, que una hora después se separaba de la etapa superior Fregat del...

Hace unos minutos el avión cohete VSS Unity de Virgin Galactic tomaba tierra tras la misión Galactic02 de la empresa. Es el primer vuelo de la empresa que lleva un turista de pago a bordo. Llega dieciséis años después de las...

Sergey Prokopyev y Dmitri Petelin completaron en la tarde-noche de ayer un nuevo paseo espacial en el segmento ruso de la Estación Espacial Internacional. Denominado VKD-60 es el decimosexto paseo espacial dedicado a la instalación y puesta en marcha del módulo...
La tripulación de la misión Artemisa II frente a su cápsula. De izquierda a derecha Jeremy Hansen de la Agencia Espacial Canadiense (CSA) y Reid Wiseman, Victor Glover y Christina Koch de la NASA – NASA La tripulación de la misión Artemisa...
Impresión artística del despegue de un Ariane 6 – ESA Sorprendiendo aproximadamente a nadie –sí, ya sé que lo digo mucho pero es que últimamente pasa mucho– Josef Aschbacher, el director de la Agencia Espacial Europea (ESA), acaba de confirmar que el...
Una Starliner a su llegada a la Estación Espacial Internacional en su misión de prueba no tripulada en mayo de 2022 – NASA Sorprendiendo aproximadamente a nadie Boeing y la NASA acaban de anunciar en una rueda de prensa en línea que...

De izquierda a derecha Alexander Grebenkin de Roscosmos, especialista de la misión; Michael Barratt, piloto; Matthew Dominick, comandante; y Jeanette Epps, especialista de la misión – NASA La NASA acaba de anunciar la composición de la tripulación de la misión Crew–8 a...

Watch Super Heavy Booster 9 static fire https://t.co/Q1ngH8oKX5— SpaceX (@SpaceX) August 6, 2023 Hace unas horas SpaceX hizo un encendido estático del Super Heavy Booster 9 (B9) con el sistema de supresión de calor y sonido por agua en funcionamiento. La B9...

#ISRO just dropped this video showing ON BOARD VIEWS of the Moon from #Chandrayaan3 as it was performing the Lunar Orbit Insertion burn!! pic.twitter.com/uKgiIECVhm— ISRO Spaceflight (@ISROSpaceflight) August 6, 2023 Tras su lanzamiento el pasado 13 de julio la sonda india Chandrayaan-3...

Tras un mes de viaje después de su lanzamiento el telescopio espacial Euclid de la Agencia Espacial Europea llegaba hace unos días a su destino en el punto de Lagrange L2 del sistema Sol-Tierra. Es un punto situado a 1,5 millones...
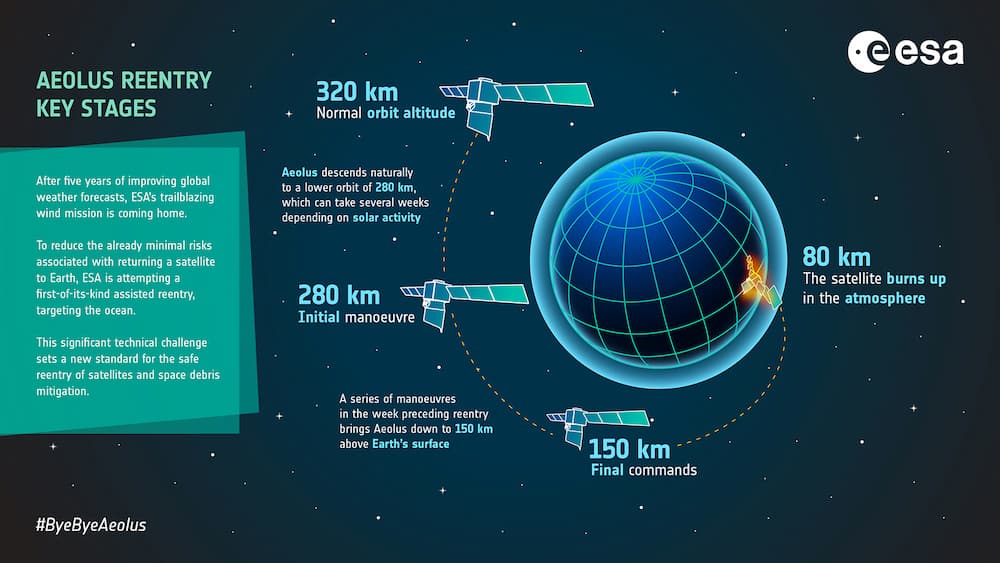
El pasado día 28 de julio un poco antes de las 21:00, hora peninsular española (UTC +2), el satélite Aeolus de la Agencia Espacial Europea terminaba su misión con una reentrada controlada sobre la Antártida.

#ICYMI: @NorthropGrumman's #Cygnus space freighter was captured with the Canadarm2 robotic arm at 5:52am ET today then installed on the station at 8:28am for three months of cargo activities. More... https://t.co/B7kHHeFlcL pic.twitter.com/21K0tT6cTS— International Space Station (@Space_Station) August 4, 2023 A las 14:28...
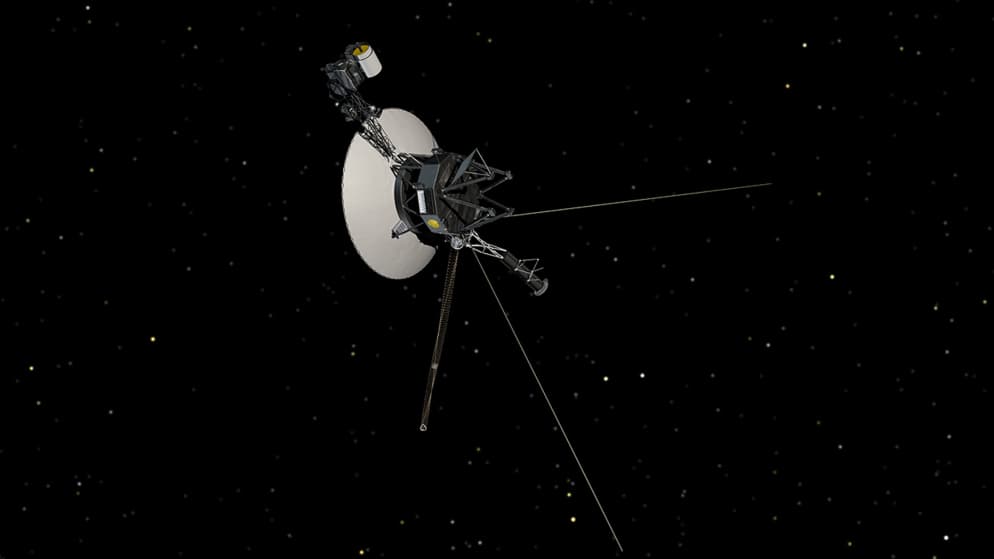
Impresión artística de la Voyager 2 en el espacio – NASA/JPL La semana pasada, a pesar del cuidado con el que supone que se hacen estas cosas, la NASA envió un comando erróneo a la sonda Voyager 2 que ha hecho que...

Despegue del último Antares 230+ - Northrop Grumman Esta pasada noche el último cohete Antares 230+ se encargaba de lanzar la cápsula de carga Cygnus 19 rumbo a la Estación Espacial Internacional (EEI). La cápsula, con 3.700 kilos de suministros a bordo,...

Tras una primera prueba a presión parcial hace unos días SpaceX completaba otra a presión completa del sistema de supresión de calor y sonido por agua de la plataforma de lanzamiento del Starship. Durante la prueba estaba colocado sobre la plataforma...

El despegue del Falcon Heavy y el aterrizaje de los propulsores laterales en una sola imagen – SpaceX Hace unas horas SpaceX alcanzaba las 250 misiones con éxito con el lanzamiento del satélite de telecomunicaciones Jupiter 3. Corrió a cargo de un...

Play Según cuenta el San Antonio Express-News la Administración Federal de Aviación de los Estados Unidos (FAA) aún no ha recibido el informe de SpaceX sobre el lanzamiento del primer Starship. Y tampoco ha concluido su propio informe. Así que dice que...
El Ariane 6 de pruebas en la plataforma de lanzamiento – ESA/CNES/ArianeSpace-ArianeGroup/Optigue vidéo du CSG/S. Martin Hace unos días la Agencia Espacial Europea conseguía hacer un primer simulacro de lanzamiento de un Ariane 6 también simulado; no es un cohete que vaya...

Before Electron returns to Earth under a parachute, it needs to undergo a process called stage separation. It looks (and sounds) a little something like this. pic.twitter.com/wDWdhfsXyJ— Rocket Lab (@RocketLab) July 17, 2023 Ahora que los cohetes despegan cargados de cámaras es...

Dimorfo y algunas de las rocas que ahora lo rodean – NASA/ESA/D. Jewitt (UCLA) En la imagen de arriba se pueden ver rocas desprendidas de Dimorfo que el telescopio espacial Hubble ha conseguido el pasado mes de diciembre. En total son 37...

Virgin Galactic acaba de revelar las identidades de las tres primeras personas que volaran «al espacio» como turistas con la compañía. Se trata, en el orden en el que fueron incluidas en el vuelo, de Jon Goodwin, un ex-olímpico británico, y...

Uno de los problemas con los que se encontró SpaceX durante el primer lanzamiento de un Starship fue la enorme cantidad de restos de hormigón que salieron despedidos desde la parte inferior de la plataforma de lanzamiento. Para intentar minimizar el...

La primera etapa de la misión a punto de ser izada a bordo del barco de recuperación – Rocket Lab Hace unas horas Rocket Lab lanzaba la misión Baby Come Back en la que un cohete Electrón ha colocado en órbita siete...

Falcon 9’s first stage has landed on the A Shortfall of Gravitas droneship pic.twitter.com/huAzkLXlEA— SpaceX (@SpaceX) July 16, 2023 En la madrugada del domingo 16 de julio SpaceX ponía en órbita un nuevo lote de 54 satélites de la constelación Starlink de...

Los satélites de SpaceX que forman la constelación Starlink han tenido que maniobrar ya 50.000 veces desde que comenzaron a orbitar la Tierra en 2019. Son por lo general pequeños ajustes para evitar potenciales colisiones entre ellos y también con otros...

Hace unos minutos se confirmaba el correcto lanzamiento de la misión india Chandrayaan 3, que ya viaja hacia la Luna. Su objetivo es colocar un aterrizador y un rover sobre su superficie, en concreto en las proximidades del cráter Manzinus U,...
Impresión artística de los distintos elementos de la misión en su configuración actual ya en Marte - NASA Todavía no es definitivo porque aún tienen que negociarlo con el Congreso, pero por su parte el senado de los Estados Unidos, en su...

El primer Vulcan durante la prueba de encendido estático de sus motores – ULA Esta pasada noche Tory Bruno, presidente y director general de ULA, dio una rueda de prensa para informar acerca de las explosiones durante sendas pruebas de la segunda...

El cohete LVM3 que lanzará la misión en la plataforma – ISRO En septiembre de 2019 India intentó hacer aterrizar la misión Chandrayaan-2 en la Luna pero un fallo de software hizo que el aterrizador y el rover que llevaba dentro se...

Pues ya es oficial: la NASA ya ha recibido las tres furgonetas eléctricas que llevarán a las tripulaciones del programa Artemisa a sus naves en lugar de la mítica Astrovan. Son versiones personalizadas del Canoo Lifestyle Vehicle. Tenían que haber sido...

Esta pasada noche, tras hacer varias modificaciones al cohete para evitar que se reprodujera el fallo que hizo fracasar su primer lanzamiento, la empresa china LandSpace ha conseguido que su segundo cohete Zhuque-2 entrara en órbita. Eso lo convierte en el...

Falcon 9’s first stage has landed on the Just Read the Instructions droneship, completing the first 16th launch and landing of a booster pic.twitter.com/bT70Zu2aKl— SpaceX (@SpaceX) July 10, 2023 SpaceX lleva tal cadencia de lanzamiento de satélites Starlink que ya raramente nos...

Esta pasada medianoche despegaba del espaciopuerto de Kourou el último Ariane 5. La misión fue un éxito y dejó en órbita de transferencia geoestacionaria el satélite de telecomunicaciones francés Syracuse 4B y el satélite de telecomunicaciones alemán Heinrich-Hertz. Los dos llegarán...

A pesar de haber superado por segunda vez los 10.000 votos necesarios para ser considerado al final el modelo en Lego del telescopio espacial James Webb (JWST) tampoco ha sido escogido por la empresa para convertirse en un producto comercial. Pero...

Ya es oficial: Pangea Aerospace y PLD Space –y las empresas con las que han concurrido– han ganado la primera fase del PERTE aeroespacial para el diseño de un lanzador español de pequeños satélites. El proyecto cuenta con una dotación presupuestaria máxima...

La Agencia Espacial Europea (ESA) acaba de publicar las primeras imágenes captadas por el detector de rayos del primer satélite Meteosat de tercera generación (MTG). Conocido como Lightning Imager (LI), está compuesto por cuatro cámaras que permiten detectar tormentas 24 horas...

Una segunda etapa Zefiro 40 de un Vega C durante los preparativos para su lanzamiento – ESA/M. Pedoussaut La semana pasada una prueba de encendido estático de una segunda etapa Zefiro 40 del cohete Vega C fue abortada antes de lo previsto....

Deployment of @ESA’s Euclid confirmed pic.twitter.com/JSX43KXaSn— SpaceX (@SpaceX) July 1, 2023 Un cohete Falcon 9 de SpaceX acaba de lanzar con éxito el telescopio espacial Euclid de la Agencia Espacial Europea (ESA). El lanzamiento estaba previsto originalmente en un Soyuz ST, la...

A @SpaceX Dragon cargo spacecraft is on its way home. Dragon successfully undocked from the station today at 12:30pm ET. It will splash down off the coast of Florida on Friday, June 30, bringing 3,600 pounds of science and hardware back to...

Todo está listo en el Complejo de lanzamiento 40 de Cabo Cañaveral para el lanzamiento del telescopio espacial Euclid de la Agencia Espacial Europea (ESA). Está previsto para las 17:11, hora peninsular española (UTC +2), del 1 de julio a bordo...

El avión cohete VSS Unity de Virgin Galactic acaba de completar con éxito el primer vuelo comercial de la empresa, bautizado como Galactic01. Es también el primer vuelo dedicado a la investigación científica. Iban a bordo el coronel Walter Villadei de...

Ship 25 completes a six-engine static fire test at Starbase in Texas pic.twitter.com/wCCrh0RRNA— SpaceX (@SpaceX) June 27, 2023 Hace unos días Ashlee Vance entrevistó a Elon Musk en un Espacio de Twitter. Durante la entrevista Musk reveló algunos de los cambios que...

Some details on spacesuit size tweaks. pic.twitter.com/ZpeqZSjmRF— Woody Hoburg (@Astro_Woody) June 27, 2023 Me ha parecido interesante este vídeo del astronauta de la NASA Woody Hoburg en el que explica cómo se puede ajustar un traje espacial (EMU, de Extravehicular Mobility Unit,...
El Embajador de la India, Taranjit Sandhu, firma los Acuerdos Artemis, ante la mirada de la Subsecretaria Adjunta para la India del Departamento de Estado de EE.UU., Nancy Jackson (izquierda), el Administrador de la NASA, Bill Nelson, y el Consejero Espacial de...

El Miura 1 con el motor encendido en su segundo intento de lanzamiento – PLD Space Se confirma lo que le contaban fuentes no oficiales a Control de Misión hace unos días: el próximo intento de lanzamiento del Miura 1 tendrá que...

OK. One more. Make sure you turn up the volume.. #VulcanRocket #CountdowntoVulcan pic.twitter.com/sdR6m2ycxR— Tory Bruno (@torybruno) June 10, 2023 El pasado 10 de junio United Launch Alliance (ULA) llevó a cabo un encendido estático de los motores de la primera etapa de...

Con la retirada de la torre móvil de servicio el Ariane 6 –más o menos, no es un cohete que vaya a volar sino una unidad para pruebas– quedaba hace unos días por primera vez a solas en la plataforma de...
Impresión artística del Miura 5 en su plataforma de lanzamiento en Kourou – PLD Space Hace unos días PLD Space y la Agencia Espacial Francesa (CNES) firmaban un acuerdo vinculante que permitirá lanzar el Miura 5 desde el Centro Espacial de la...

Tras años de retrasos por Virgin Galactic ha anunciado por fin el principio de sus vuelos comerciales «al espacio». El primero, bautizado como Galactic 01, está previsto para una ventana de lanzamiento que va del 27 al 30 de junio. El...

En la tarde de ayer Sergey Prokopyev y Dmitri Petelin llevaron a cabo un paseo espacial en el segmento ruso de la Estación Espacial Internacional (EEI). Conocido como VKD 59, estaba dedicado a diversas tareas de mantenimiento. En total estuvieron seis...
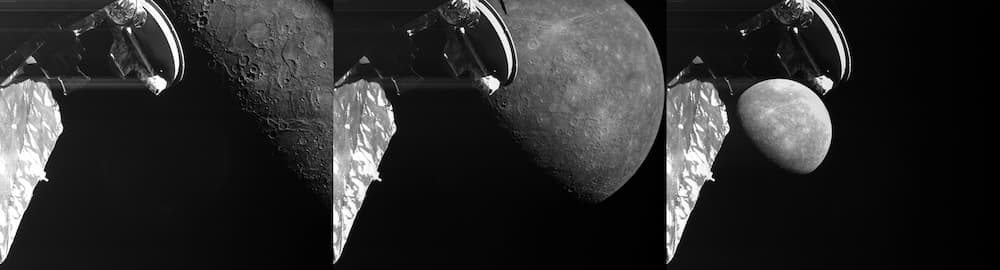
#ICYMI: @BepiColombo made it's third flyby of Mercury on 19 June 2023, snapping images of a newly named impact crater as well as tectonic and volcanic curiosities as it adjusts its trajectory for entering Mercury orbit in 2025. https://t.co/BAxaFwbsxp pic.twitter.com/aPFhLjGwSw— ESA (@esa)...

John McFall –centro, obviamente– en el simulador de la EEI - ESA En la última selección de astronautas de la Agencia Espacial Europea (ESA) una plaza quedó reservada para un paraastronauta. Esa plaza la ocupa el británico John McFall, cuya pierna derecha...

Wandt entrenándose en el manejo de los sistemas de Columbus en el simulador situado en el ESTEC - ESA La Agencia Espacial Europea acaba de hacer público que ha escogido al sueco Marcus Wandt para volar a la Estación Espacial Internacional en...

Estaba previsto que el pasado viernes 16 de junio de 2023 el veterano cohete Ariane 5 hiciera su lanzamiento número 117, que será el último de su carrera. Pero un día antes Arianespace, que es quien lo opera, anunciaba un retraso en...

De izquierda a derecha: Konstantin Borisov, Andreas Mogensen, Jasmin Moghbeli y Satoshi Furukawa La NASA acaba de anunciar que el cuarto miembro de la tripulación Crew 7 con destino a la Estación Espacial Internacional es el cosmonauta Konstantin Borisov. Se une a...

Esta pasada noche tras una cuenta atrás sin mayores problemas y ya con el motor del Miura 1 encendido y a su empuje nominal –lo que es muy importante– se ha producido un aborto del lanzamiento en el último momento. Fue...
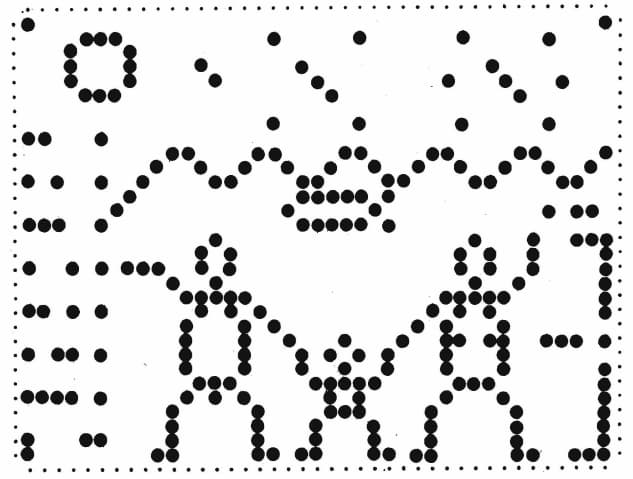
Este curioso trabajo titulado Comunicación con inteligencias extraterrestres, medio secreto, medio «sólo para uso oficial» de la NSA estadounidense fue desclasificado por el puro paso de los años. Es curioso verlo con perspectiva, porque parece que inspiró a muchos científicos, además...
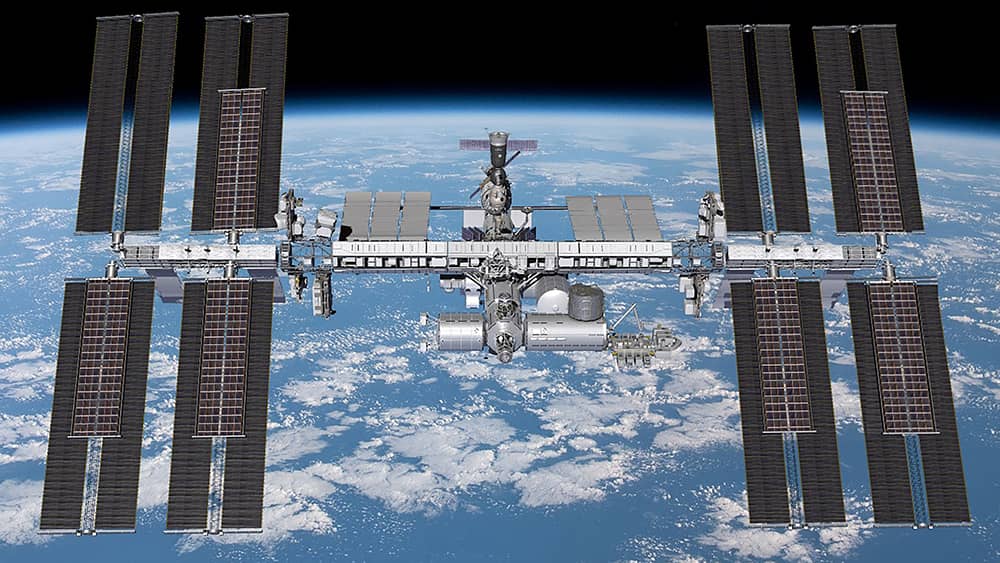
The roll-out solar array installed earlier today by @NASA_Astronauts Steve Bowen and @Astro_Woody unfolds as Earth glows in the background. When fully unrolled, it will span 60 feet long by 20 feet wide. Watch live... https://t.co/cBNqC5Ke07 pic.twitter.com/DRaNzqrqFw— International Space Station (@Space_Station) June...

Esta pasada noche SpaceX ha lanzado su octava misión compartida. Conocida como Transporter 8, ha servido para poner en órbita sincrónica al Sol de 525 kilómetros de altitud un total de 72 satélites de distintas operadoras de todo el mundo. Si...
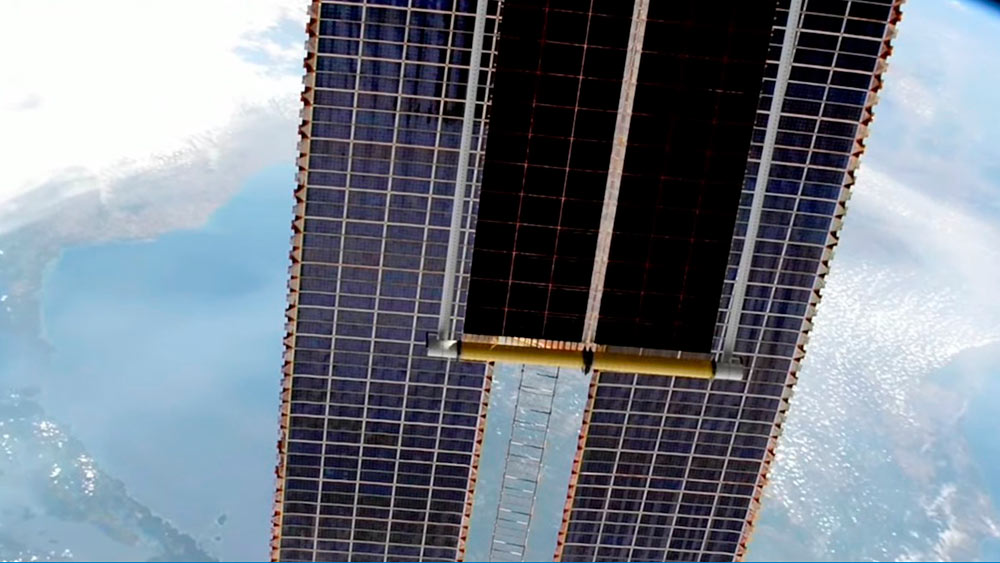
This time-lapse video sped up 7.7 times shows the new roll-out solar array being deployed after @NASA spacewalkers Stephen Bowen and @Astro_Woody successfully installed it on the station today. https://t.co/yuOTrYNGst pic.twitter.com/flKo7HCS6A— International Space Station (@Space_Station) June 9, 2023 En la tarde del...

La Dragon 28 acoplada a la EEI – NASA TV Aproximadamente al mediodía de ayer la cápsula de carga Dragon 28 se acoplaba al puerto superior del módulo Harmony de la Estación Espacial Internacional (EEI). Lleva a bordo un total de 3.304...

Después de 186 días en el espacio la cápsula tripulada china Shenzhou 15, lanzada el 29 de noviembre de 2022, tomaba tierra esta pasada noche en el sitio de aterrizaje de Donfeng, lo que ponía fin a su misión. Con 186...

Hoy se cumplen 20 años del lanzamiento de la Mars Express de la Agencia Espacial Europea (ESA) rumbo a Marte el 2 de junio de 2003. Llegó a su destino el 25 de diciembre de ese mismo año. Y aunque estaba...
Personal de Boeing trabajando en una Starliner – Boeing Boeing y la NASA llevaban un tiempo diciendo que, tras múltiples retrasos, iban a intentar lanzar la primera misión tripulada de la Starliner el próximo 21 de julio. Pero en una rueda de...

Una imagen histórica: el primer cohete desarrollado por una empresa privada española listo para emprender el vuelo – PLD Space Cuando todo estaba listo desde el punto de vista técnico para el primer lanzamiento del Miura 1 la meteorología ha obligado a...

La Crew Dragon Freedom flotando en el Golfo de México a la espera de ser izada al barco de recuperación – SpaceX La cápsula tripulada Crew Dragon Freedom de SpaceX amerizaba hace unas horas en el Golfo de México. Eso ponía fin...

Julissa Reynoso, embajadora de Estados Unidos en España y Andorra, Bill Nelson, administrador de la NASA, y Pedro Sánchez, presidente de España, presencian la firma de los Acuerdos Artemisa por Diana Morant, ministra española de Ciencia e Innovación – NASA/Jackie McGuinness Esta...
Ya es oficial: ¡Por fin MIURA 1 SN1 está listo para volar!· Nombre de Misión: MIURA 1 SN1 Test Flight· Ventana de Lanzamiento: 30 de mayo 08:00 / 31 de mayo 10:00 (CET)· Retransmisión en directo: 31 de mayo a partir de...

Hace unas horas China ha lanzado con tres astronautas a bordo la cápsula tripulada Shenzhou 16, que se acaba de acoplar en su estación espacial. Sumados a las 14 personas que ahora mismo hay en la Estación Espacial Internacional (EEI) esto...
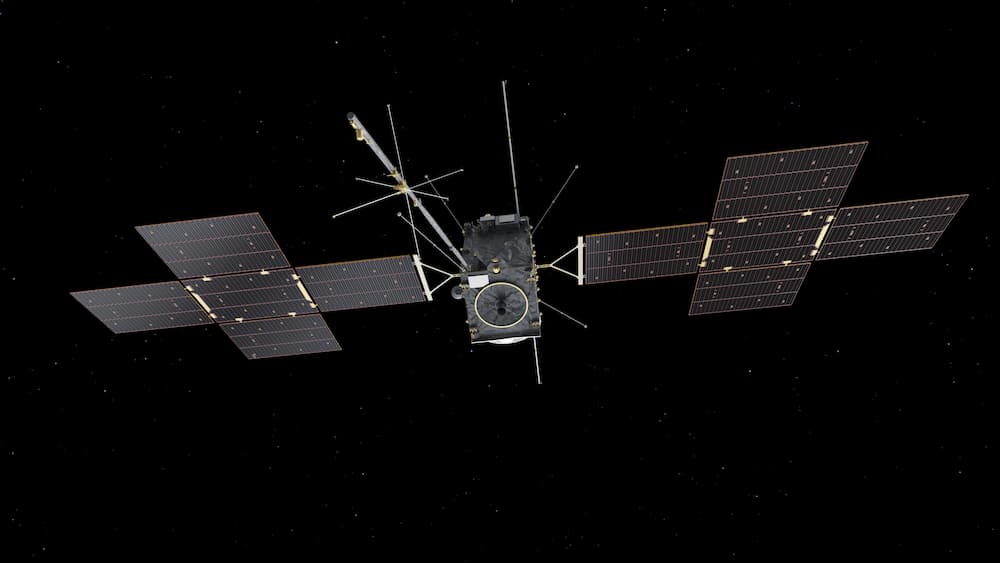
Impresión artística de JUICE totalmente desplegada – ESA A finales de la semana pasada la sonda JUICE de la Agencia Espacial Europea (ESA) completaba su proceso de despliegue tras su lanzamiento. En concreto los últimos elementos en colocarse en posición fueron las...
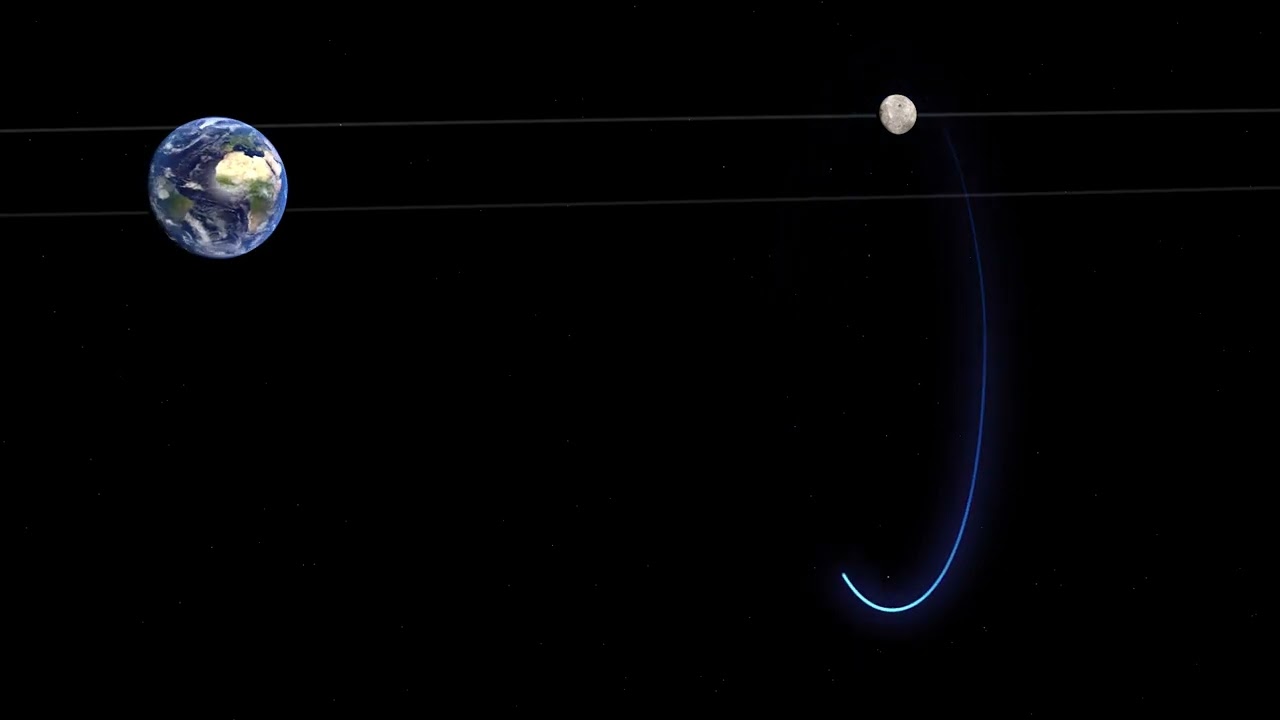
Hace unos días la NASA daba por concluida la misión sonda CAPSTONE para explorar la futura órbita de la estación lunar Gateway. En concreto dice que ha cumplido los dos objetivos establecidos: uno, mantener al menos durante seis meses su órbita...

Esta pasada madrugada un cohete Electrón de Rocket Lab despegaba desde sus instalaciones en Nueva Zelanda para la misión Coming to a Storm Near You. A bordo iban los dos últimos satélites de la constelación TROPICS de la NASA, que fueron...

Ryo Ujiie, el director de tecnología de ispace, durante la presentación del informe sobre el accidente – ispace Un mes después de su intento fallido de alunizaje la empresa japonesa ispace ha hecho públicos los resultados de su investigación sobre el fallo....

VSS Unity, el avión cohete de Virgin Galactic, acaba de aterrizar tras un vuelo propulsado en el que ha superado ligeramente los 87 kilómetros de altitud. Es su primer vuelo propulsado desde aquel en el que Richard Branson cumplió su sueño...

Kathy Lueders celebra la apertura de escotillas entre la Crew Dragon Endeavour y la EEI en la primera misión tripulada de la nave de SpaceX– NASA/Joel Kowsky A finales de marzo la NASA anunciaba que Kathy Lueders, quien llegó a ser la...

Ayer por la mañana Roscosmos lanzaba la cápsula de carga Progress MS-23 rumbo a la Estación Internacional (EEI), a cuyo módulo Poisk se acoplaba de forma automática horas más tarde. Configuración de la EEI con la Progress MS-23 (a la que...

Primer lanzamiento con éxito de la empresa – Virgin Orbit Virgin Orbit, la empresa fundada por Richard Branson que pretendía hacerse un hueco en el mercado de los lanzamientos espaciales con su cohete LauncherOne no ha sobrevivido al proceso de bancarrota en...

Ya es oficial: el 1 de junio sale el set Lego 42158 con el que podrás montar el rover Perseverance de la NASA junto, cómo no, con su intrépido compañero el helicóptero Ingenuity. Son 1.132 piezas de la serie LEGO Technic...
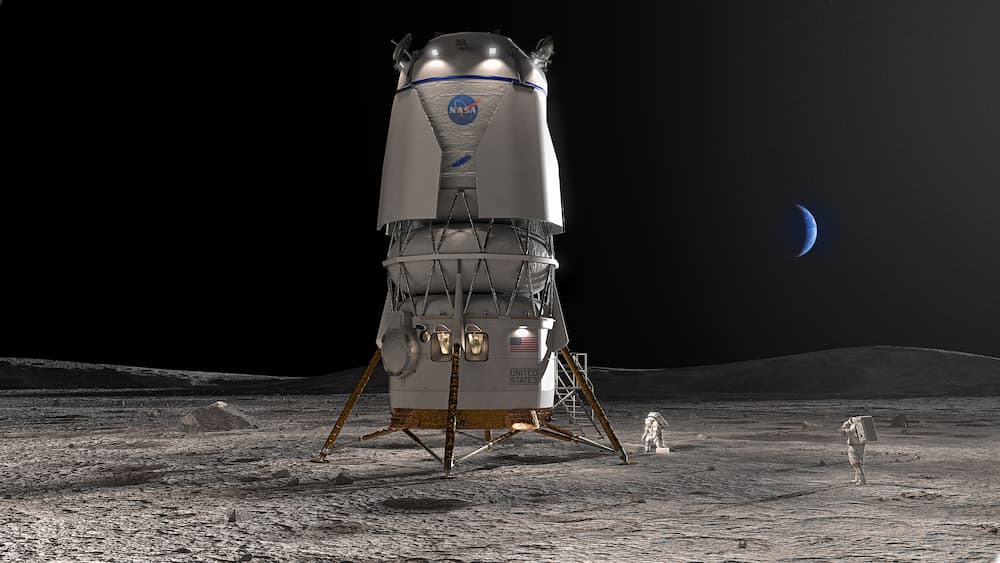
Impresión artística del aterrizador lunar de National Team 2 sobre la superficie de la Luna – NASA Cuando en abril de 2021 la NASA adjudicó a SpaceX la construcción de un aterrizador lunar para el programa Artemisa alegó que sólo tenía dinero...

Esta pasada noche un Falcon 9 de SpaceX ponía en órbita la misión Ax-2 de Axiom Space. Se trata de la segunda misión espacial privada a la Estación Espacial Internacional (EEI). A bordo de la Crew Dragon Freedom van Peggy Whitson,...

Succesful 5-seconds hot test!Extremely glad to announce that yesterday we successfully completed our Hot Fire Test of Rocket MIURA 1 for MIURA1 SN1 Test Flight!We are one step closer to complete our dream mission!Stay tuned for more news coming soon! #VamosMIURA pic.twitter.com/EhPzqOvHjO—...

Vast, una empresa lanzada en septiembre de 2022 con el objetivo de desarrollar las primeras estaciones espaciales con «gravedad artificial» acaba de anunciar que planea lanzar la primera estación espacial comercial del mundo. Bautizada como Haven-1 (Cielo-1) su lanzamiento no se...

Josie nos escribió para contarnos que lanzaron The Solar System Flipbook Collection, unos minilibros «cinemágicos» animados de esos en los que pasas las páginas con el dedo para ver cómo se mueven las imágenes. La colección limitada, que ya ha cosechado...

Ya casi no es noticia porque lo hacen parecer rutinario pero SpaceX ha llegado a los 200 lanzamientos consecutivos con éxito. En concreto alcanzó esa bonita cifra con el lanzamiento de un lote de satélites Starlink a bordo de un Falcon...

El pasado viernes 12 Sergey Prokopyev y Dmitri Petelin llevaron a cabo un paseo espacial en el que desplegaron y llenaron de refrigerante el radiador del módulo Nauka de la Estación Espacial Internacional (EEI) que habían instalado en su sitio el...

#ICYMI, we can't stop watching it@ESA_Juice's 16-m RIME antenna set free pic.twitter.com/3U6BSHAP6L— ESA Operations (@esaoperations) May 15, 2023 En las últimas semanas la antena del radar RIME de la sonda JUICE de la Agencia Espacial Europea traía de cabeza al equipo de...
Impresión artística del despegue de un Ariane 6 – ESA La Agencia Espacial Europea (ESA) acaba de publicar una actualización de la hoja de ruta hacia el primer lanzamiento del Ariane 6. Y promete seguir haciendo actualizaciones, con la próxima para el...

Poco antes de la pasada noche, unas ocho horas después de su lanzamiento, el carguero espacial Tianzhou-6 atracaba en el puerto posterior del módulo Tianhe de la estación espacial china. Lleva a bordo unas siete toneladas de carga, que incluyen suministros...

Este pasado fin de semana no fue la estación espacial china la única que estuvo de mudanza. En la Estación Espacial Internacional la Crew Dragon Endeavour, la nave de la tripulación Crew-6, fue trasladada del puerto superior al frontal del módulo...
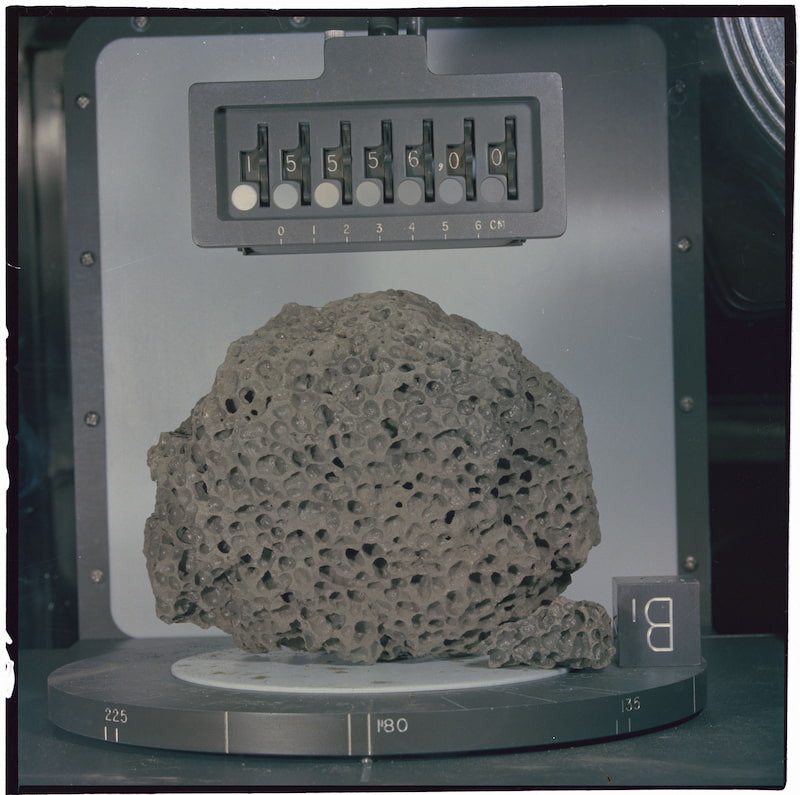
El Catálogo de rocas y polvo de la Luna de las Misiones Apolo de la NASA es una pequeña maravilla que han recuperado en un artículo de Beautiful Public Data junto con algunas cifras y anécdotas. Básicamente contiene información detallada de...

Hace apenas unas horas el avión espacial chino terminaba su segunda misión con un aterrizaje en el Centro de Lanzamiento de Satélites de Jiuquan. Había despegado el pasado 4 de agosto, así que ha pasado 276 días en órbita, lo que es...

El pasado día 5 el carguero espacial Tianzhou-5 se desacoplaba del módulo Tianhe de la estación espacial china. Eso deja sitio para la llegada del Tianzhou-6, cuyo lanzamiento está previsto para el día 10, y que se acoplará al puesto posterior...

Después de varios aplazamientos debidos a una meteorología poco cooperativa esta pasada noche Rocket Lab ha lanzado con éxito la misión Rocket Like a Hurricane. A bordo del cohete Electrón iban dos de los satélites de la constelación TROPICS de la...
La Estación Espacial Internacional fotografiada el 4 de octubre de 2018 por la tripulación de la Expedición 56 desde la Soyuz MS-08 – Roscosmos/NASA Hace unos días el gobiernmo de Rusia, que era el socio que faltaba, confirmaba al resto de los...

Un día más, otro conjunto de Lego más que nos encanta. En este caso se trata de Historias de la Era Espacial, propuesto Jan Woźnica (AKA john_carter) en 2021 para Lego Ideas. Son 688 piezas que permiten construir cuatro escenas inspiradas...
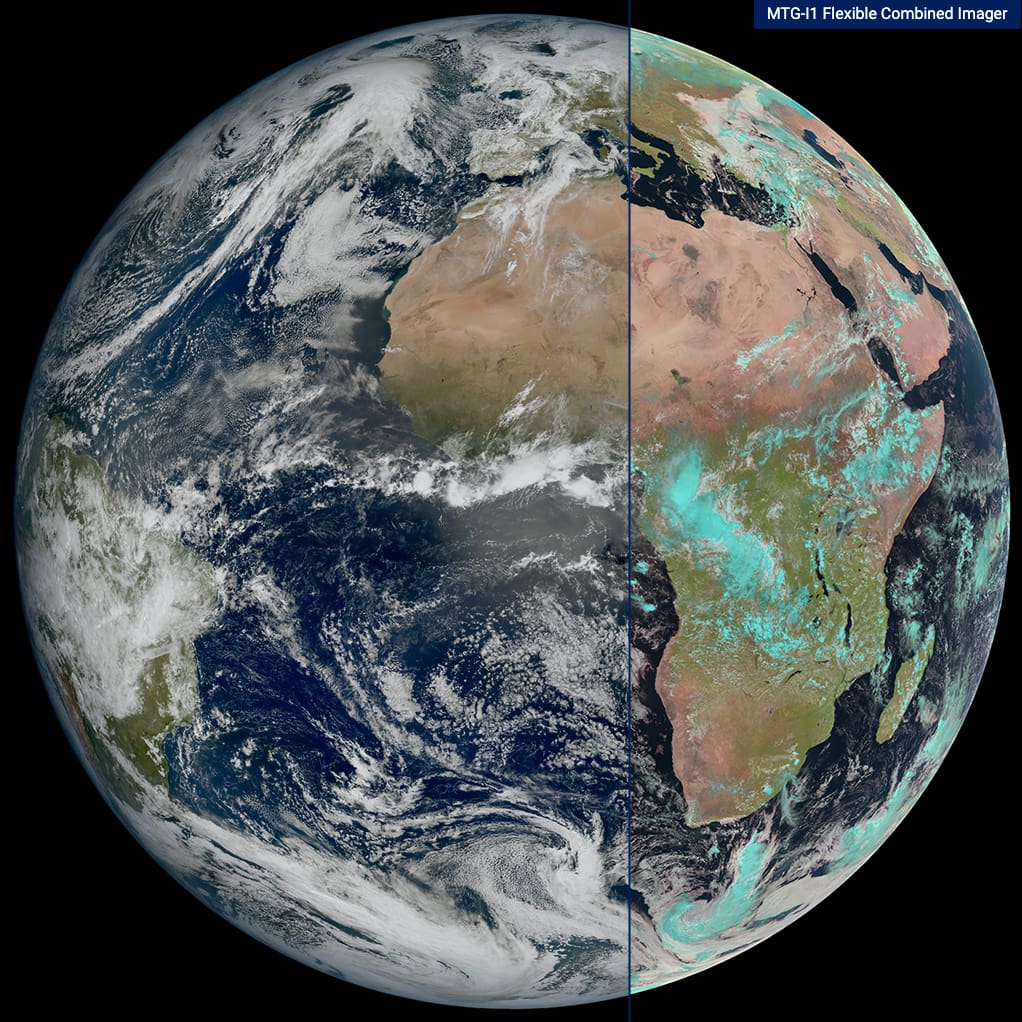
Se acaban de dar a conocer las primeras y muy espectaculares imágenes del satélite meteorológico MTG-I1 con unas fotografías de Europa desde una órbita a unos 36.000 km sobre la Tierra donde se pueden ver –y comparar– los progresos en tecnología...
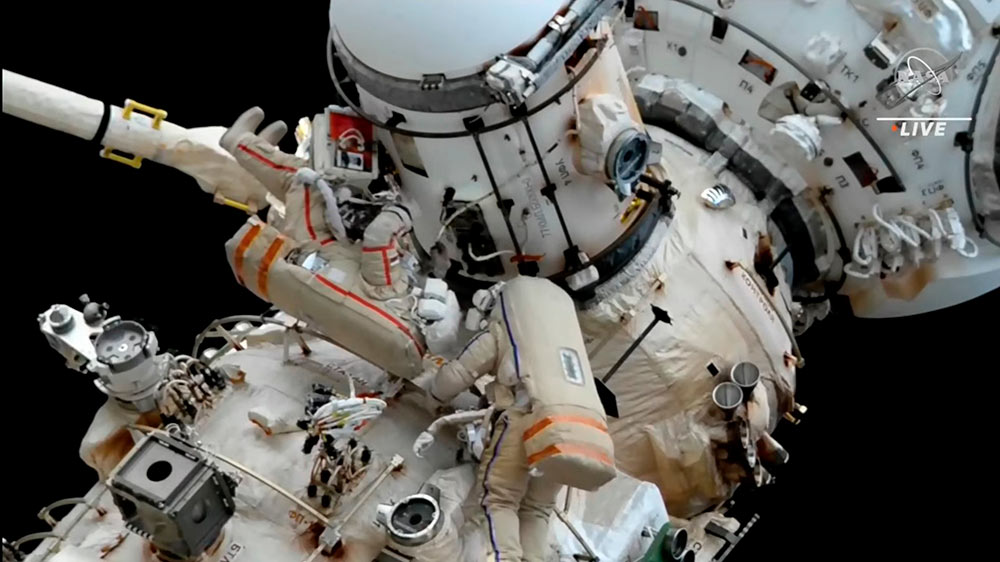
Esta pasada noche Sergey Prokopyev y Dmitri Petelin llevaron a cabo un paseo espacial en el que la esclusa ShK del módulo Nauka fue por fin instalada en su sitio trece años después de haber llegado a la Estación Espacial Internacional...
El Centro para la Diversidad Biológica, la American Bird Conservancy, la Fundación Surfrider, Save RGV y la Nación Carrizo/Comecrudo de Texas han presentado una demanda contra la Administración Federal de Aviación (FAA) de los Estados Unidos por haber concedido la licencia de...

Liftoff from Starbase pic.twitter.com/rgpc2XO7Z9— SpaceX (@SpaceX) April 20, 2023 Esta cosa funciona y vamos a resolver los problemas que quedan y vamos a ponerlo en órbita y vamos a hacerlo reutilizable y eso significa que tenemos un camino real aquí para llevar...

Ayer, 30 de abril de 2023, fue el último día de operaciones del satélite Aeolus de la Agencia Espacial Europea (ESA). Lanzado el 23 de agosto de 2018 su objetivo era medir la velocidad del viento entre la superficie y los...

Después de varios retrasos primero por motivos técnicos –hubo que cambiar un motor– y luego porque la meteorología no colaboró esta pasada noche un Falcon Heavy de SpaceX por fin lanzaba el satélite de telecomunicaciones ViaSat-3 Americas. Ha sido el quinto...
#ESAJuice deployment status update: our 16 m-long ice-penetrating RIME antenna is not yet fully deployed as planned. Work is ongoing to resolve an issue currently preventing it from being released from its mounting bracket.Details https://t.co/AIr13dQzMw pic.twitter.com/ABC2Ok8DXj— ESA's Juice mission (@ESA_JUICE) April 28,...

Esta tarde Steve Bowen de la NASA (EV1 en el vídeo) y Sultan Alneyadi de los Emiratos Árabes Unidos (EV2) han llevado a cabo un paseo espacial en la Estación Espacial Internacional (EEI). Era el octavo para Bowen y el primero...

What’s next? SPACE!Following today’s flight data analysis, our next mission will be a rocket-powered spaceflight to assess the customer experience and ground-based testing prior to the launch of commercial service. More → https://t.co/7aoIpeGyRK#VirginGalactic pic.twitter.com/e0MU6YOJ8u— Virgin Galactic (@virgingalactic) April 26, 2023 El VSS...
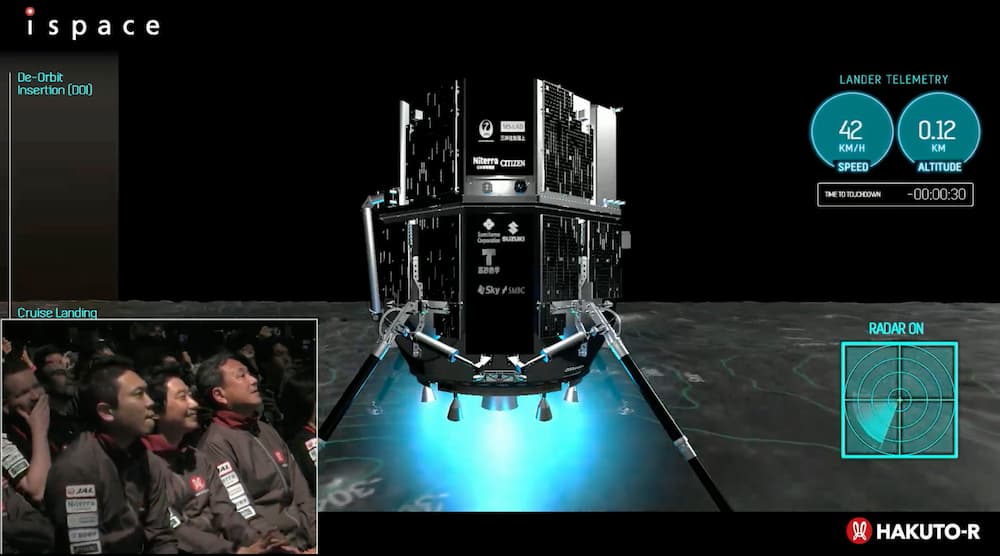
HAKUTO-R Mission 1 statement. Nothing is confirmed, but it does not look good. pic.twitter.com/fnTsbPNsmh— Chris Bergin - NSF (@NASASpaceflight) April 25, 2023 Aunque todo se estaba desarrollando según lo previsto el control de la misión de ispace perdió el contacto con la...
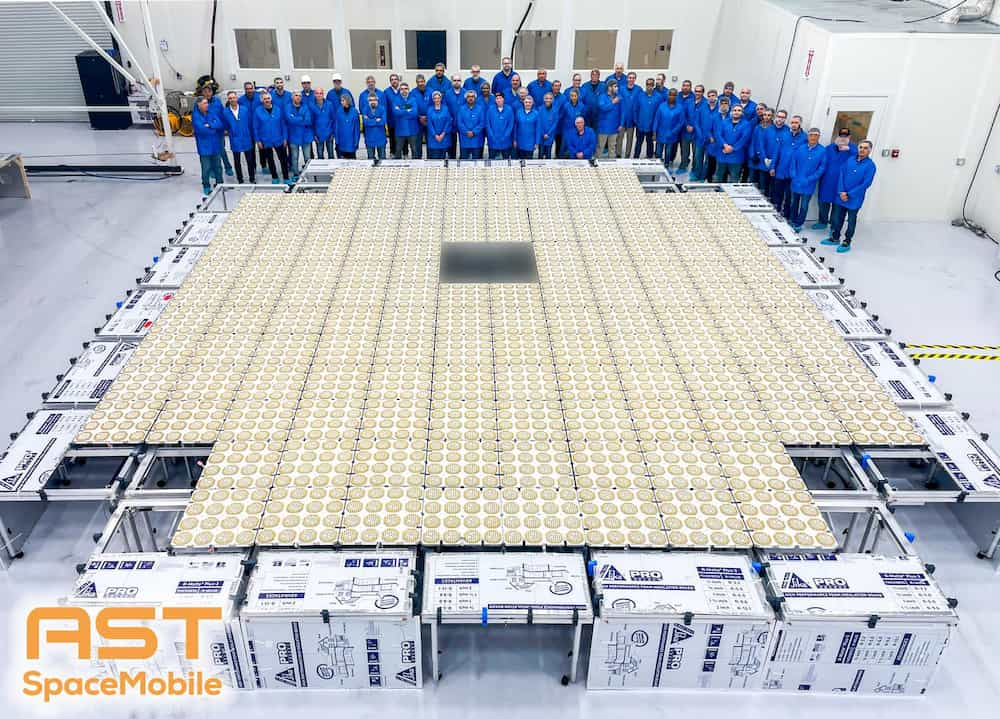
BlueWalker 3 antes de ser plegado para su lanzamiento. Su antena es la mayor antena de comunicaciones que hay hoy en día en órbita – AST SpaceMobile AST SpaceMobile acaba de anunciar que han conseguido hace la primera llamada vía satélite de...

Liftoff from Starbase pic.twitter.com/rgpc2XO7Z9— SpaceX (@SpaceX) April 20, 2023 Visto todo lo que sucedió con el primer lanzamiento del Starship que no fue precisamente nominal –trozos de hormigón volando por todas partes, motores dañados, partículas de polvo sobre poblaciones cercanas, etc– la...

De izquierda a derecha: La Directora General de la Agencia Espacial Nacional Sueca, Anna Rathsman, el Director General de la ESA, Josef Aschbacher, y el Presidente y Consejero Delegado de Axiom, Michael Suffredini – Axiom Space Hace unos días Axiom Space y...
A última hora de la tarde de ayer la cápsula de carga Cygnus 18 «S.S. Sally Ride» terminaba su misión con una reentrada controlada sobre el Pacífico. Tanto la cápsula como su contenido se desintegraron en la atmósfera. Como es habitual...
A la segunda ha ido la vencida y SpaceX por fin ha conseguido lanzar el primer cohete Starship. Pero probablemente lo mejor que se puede decir es que al menos no explotó en la plataforma de lanzamiento sino que se desintegró...
Sergey Prokopyev y Dmitri Petelin acaban de terminar un paseo espacial que empezó poco antes de las cuatro de la madrugada en el que, asistidos por Andrey Fedyaev a los mandos del Brazo robot europeo (ERA), el radiador del módulo Nauka...
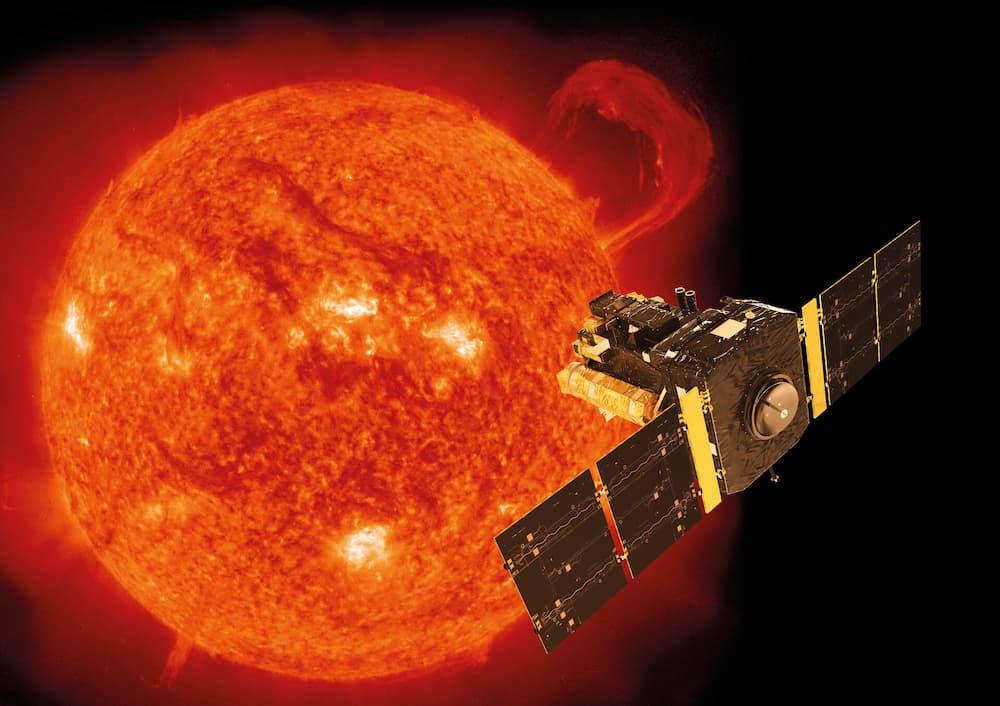
Lanzamiento de SOHO el 2 de diciembre de 1995 – ESA/NASA En esta casa somos muy «fanses» de los números redondos. Así que nos ha encantado descubrir que el Solar and Heliospheric Observatory, Observatorio solar y heliosférico, mucho más conocido como SOHO,...

Un Soyuz ST lanzando los dos primeros satélites Galileo en tiempos mejores - ESA/CNES/ARIANESPACE - S. Corvaja, 2011 Con el lanzamiento de la misión JUICE el pasado 14 de abril a la Unión Europea tan sólo le queda un cohete operativo. Literalmente...

Todo estaba yendo como la seda en la cuenta atrás para el primer lanzamiento del Starship de SpaceX. Y la meteorología difícilmente podía ser peor. Pero unos minutos antes de la hora programada para el despegue una válvula congelada en la...

Impresión artística de un par de satélites de Sateliot en órbita - Sateliot Con varios días de retraso respecto a las previsiones iniciales porque la meteorología no colaboraba el sábado 15 de abril SpaceX lanzaba por fin la misión compartida Transporter 7....
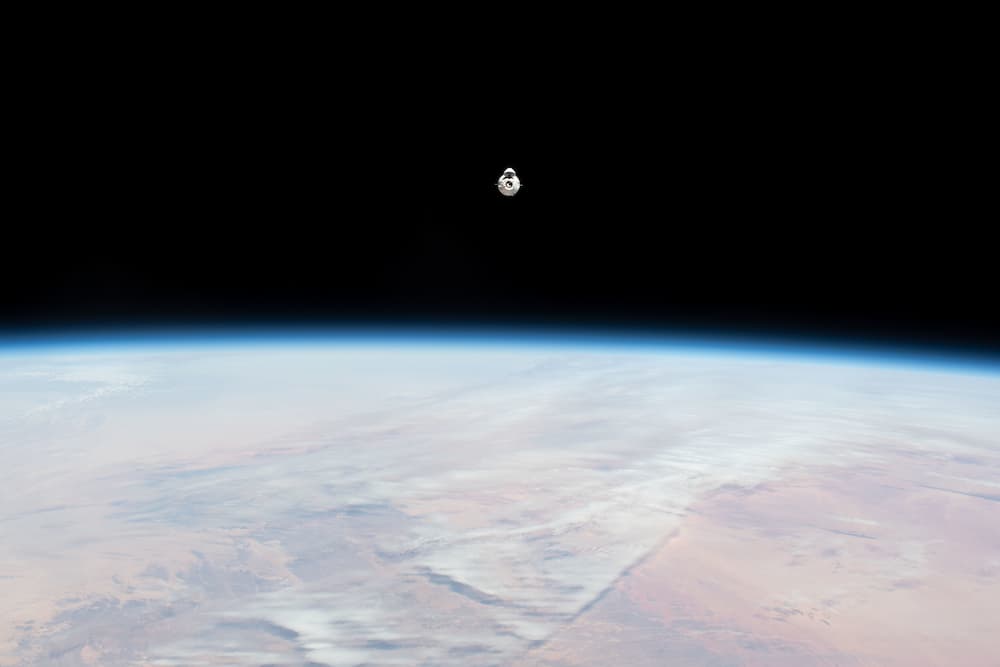
The @SpaceX cargo Dragon undocked from the station at 11:05am ET today as the station was flying over the Indian Ocean. It will return nearly 4,300 pounds of @ISS_Research samples and hardware for NASA. Read more.. https://t.co/S9rzinev1E pic.twitter.com/ap4BoP1JmL— International Space Station (@Space_Station)...
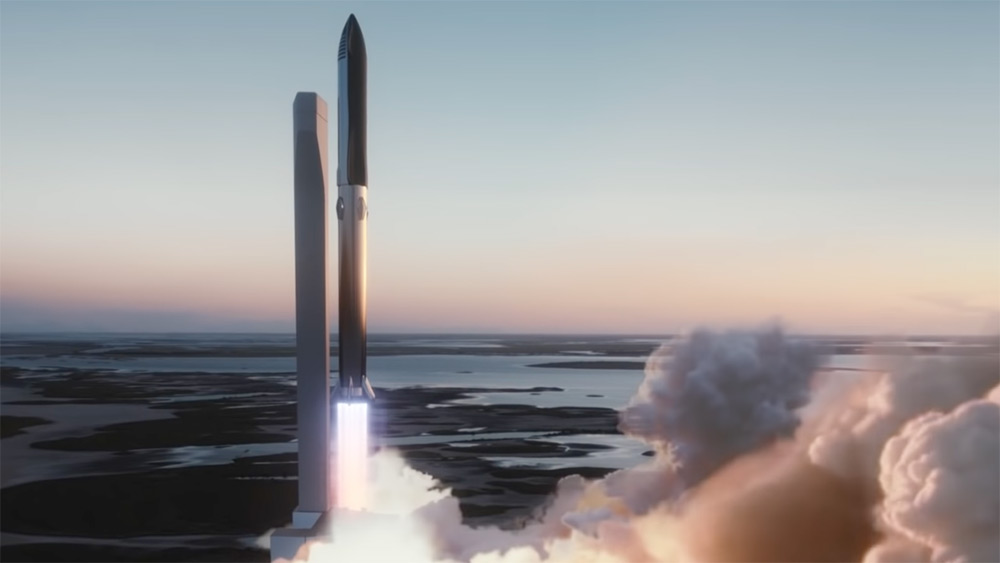
El primer Starship en la plataforma de lanzamiento – SpaceX Pues después de semanas de especulaciones ya es oficial. SpaceX ya tiene todos los permisos necesarios y ha programado el primer intento de lanzamiento del Starship para el lunes 17 de abril...

Ingenuity completaba ayer su vuelo número 50 en Marte, apenas una semana antes del segundo aniversario de su primer vuelo, que fue el 19 de abril de 2021. No está nada mal si tenemos en cuenta que lo único que se...

Con el despliegue de los paneles solares, que desde las 15:33, hora penincular española (UTC +2), están en posición y generando electricidad, ya se puede decir que el lanzamiento de la sonda JUICE de la Agencia Espacial Europea rumbo a Júpiter...

Juice y su cohete en la plataforma de lanzamiento – ESA-CNES-ArianeSpace / Optique vidéo du CSG - S. Martin Todo está listo en el espaciopuerto de Kourou para el segundo intento de lanzamiento de la sonda Juice de la Agencia Espacial Europea...

Despegue del primer y aparentemente único Terran 1 – Relativity Space En una serie de tuits Relativity Space ha dado cuenta de las que cree que son las causas –la investigación aún no está cerrada– de que su cohete Terran 1 no...
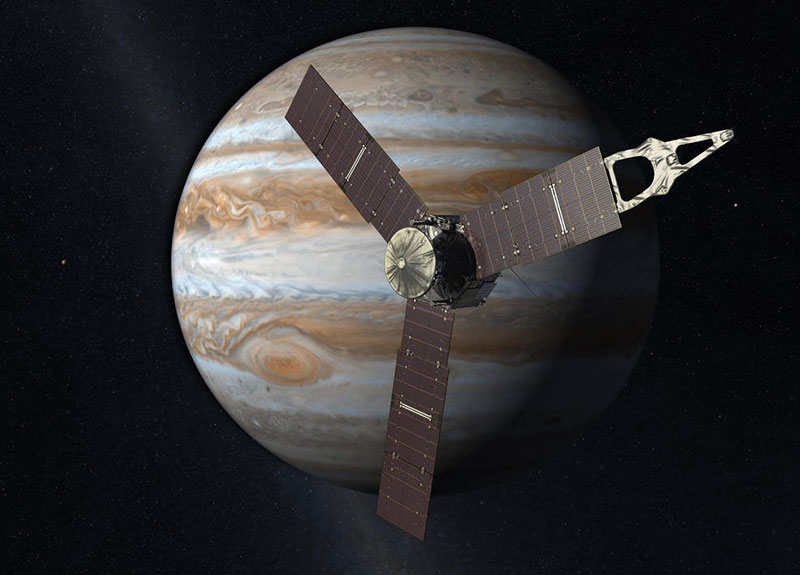
Mosaico conmemorativo de las 50 órbitas de Juno – NASA Hace unos días la sonda Juno de la NASA completaba su órbita número 50 alrededor de Júpiter. La agencia lo ha celebrado publicando un mosaico que recoge otras tantas imágenes, una por...
Historia del futuro: Utopías y distopías después de la pandemia. Por Pablo Francescutti. Editorial Comares (28 de diciembre de 2021). 198 páginas. Desde unas fracciones infinitesimales de segundo después del Big Bang –la ciencia no es capaz de asegurar lo que pasó...

El pasado 6 de abril la doctora Makenzie Lystrup tomaba posesión de su cargo como directora del Centro de vuelo espacial Goddard de la NASA. Es la primera mujer que lo va a dirigir en los 65 años que han transcurrido desde...

El 25 de julio de 2019 iSpace se convirtió en la primera empresa privada china en conseguir llevar a cabo un lanzamiento orbital con su Hyperbola-1. Pero desde aquel día los tres los lanzamientos siguientes del cohete que hizo la empresa...

Esta mañana Sergey Prokopyev pilotó la Soyuz MS-23 en modo manual para cambiarla del puerto de atraque del módulo Poisk al módulo Prichal de la Estación Espacial Internacional (EEI), que está a su vez en el extremo inferior del módulo Nauka....

En el cielo nocturno podemos ver muchas luces, la mayor parte estrellas. Y entre ellas, algunas que son asteroides, que pueden pasar peligrosamente cerca de la Tierra o incluso impactar sobre ella, y si no, que les pregunten a los dinosaurios....

Explosión del primer Ariane 5 en su primer lanzamiento¹ – ESA Cuando en junio de este año el último Ariane 5 sea lanzado para poner en órbita un par de satélites Europa se habrá quedado, simple y llanamente, sin cohetes, lo que...

El avión nodriza de la empresa durante unas pruebas de acoplamiento del cohete – Virgin Orbit No era una cuestión de si lo iba a hacer sino de cuándo lo iba a hacer al no haber conseguido financiación para seguir operando. Pero...

Wet Dress Rehearsal MIURA 1 ha superado con éxito el ensayo de carga completa de propelentes con reloj hasta T0. Estamos un paso más cerca del lanzamientoMIURA 1 has successfully completed the full propellant loading test up to T0. We're one step...

Los candidatos en su primera jornada de estudios – ESA En una curiosa casualidad cósmica justo el día en el que la NASA presentaba a la tripulación de la misión Artemisa II, la nueva promoción de candidatos a astronauta de la Agencia...

De izquierda a derecha Hansen, Glover, Reid y Koch en el simulador de la cápsula Orión – NASA La NASA acaba de dar los nombres de las personas que formarán parte de la tripulación de la misión Artemisa II alrededor de la...

Suena un poco a trabalenguas pero este pasado fin de semana la empresa china Space Pioneer se convertía en la primera empresa privada del mundo en poner en órbita a la primera un cohete de combustible líquido. En concreto se trata...

El RLV-TD, que es el demostrador del futuro transbordador espacial de la India, conseguía ayer hacer su primer aterrizaje. Lanzado desde un helicóptero Chinook de la Fuerza Aérea India a 4,5 kilómetros de altitud y a una velocidad y actitud similares...

WONDERFUL REENTRY LAST NIGHT OVER #SPAIN OF USA 231 PAYLOAD #ID51007. Our colleague Diego Rodríguez recorded it from Collado-Villalba, Madrid just after its fragmentation. Prof. @Josep_Trigo @ice_csic @IEEC_space matched the event with that payload reentry https://t.co/V7COgR9GLo pic.twitter.com/F5remQYGhH— Red Investigación Bólidos y Meteoritos...

Cosmic Girl, el avión nodriza de la empresa – Virgin Orbit Hace un par de semanas Virgin Orbit, la empresa que ofrece lanzamientos espaciales con su cohete LauncherOne desde su avión nodriza Cosmic Girl, anunció que ponía en pausa sus operaciones. Pero...

Impresión artística del lanzamiento de una Starliner - Boeing/ULA Lo adelantaba hace unos día Kathy Lueders, la responsable de las misiones tripuladas de la NASA, pero ahora ya es oficial y tiene fecha: la primera misión tripulada de la Starliner de Boeing,...

Hace apenas unas horas la cápsula tripulada Soyuz MS-22 terminaba su accidentada misión aterrizando en Kazajistán sin ningún miembro de su tripulación original a bordo. Su lugar lo ocupaban 218 kilos de carga, incluidos los resultados de 19 experimentos científicos, equipos...

Esta mañana un cohete LVM 3 –antes conocido como GSLV Mk3– despegaba del espaciopuerto de Sriharikota en India con 36 satélites de OneWeb a bordo. Tras el lanzamiento los 36 satélites se han separado correctamente de la etapa superior del cohete...
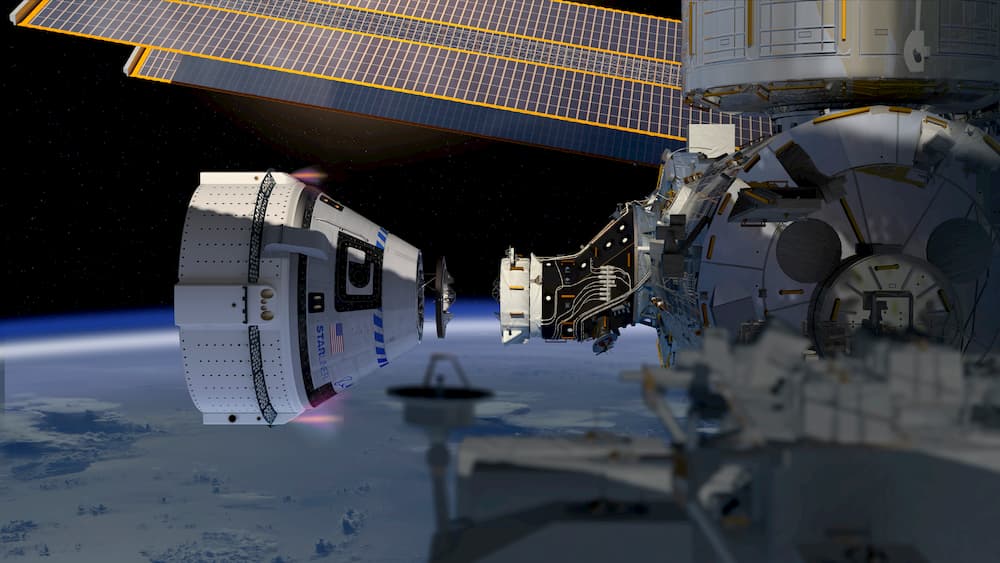
Impresión artística de una Starliner a punto de atracar en la EEI - Boeing Kathy Lueders, la responsable de las misiones tripuladas de la NASA, confirmaba a través de su cuenta de Twitter el enésimo retraso de la primera misión tripulada de...
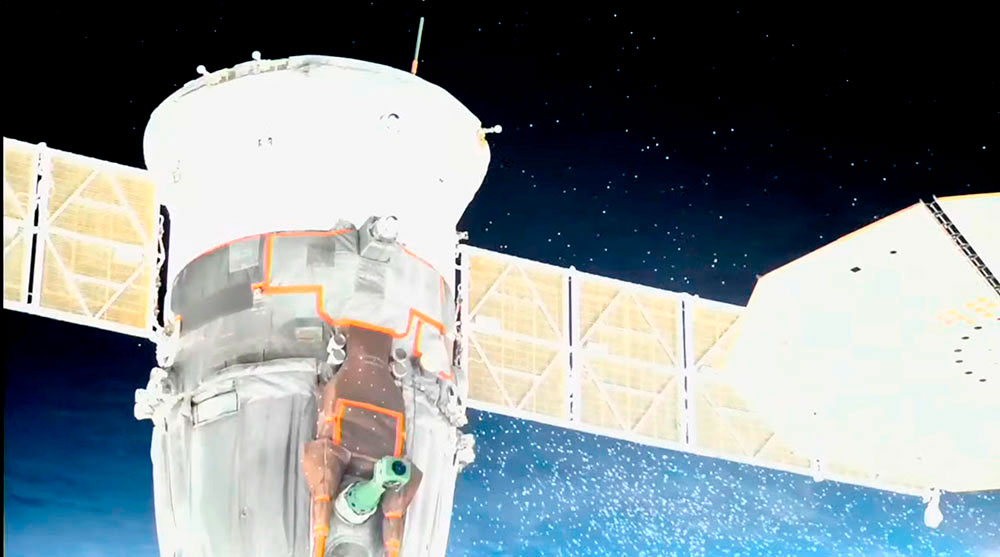
La nube de partículas provenientes de la fuga de refrigerante de la Soyuz MS-22 – NASA TV El pasado día 15 Sergei Prokopiev, Dmitry Petelin y Andrei Fedyaev hicieron una simulación de retorno a Tierra de la cápsula Soyuz MS-22 para ver...
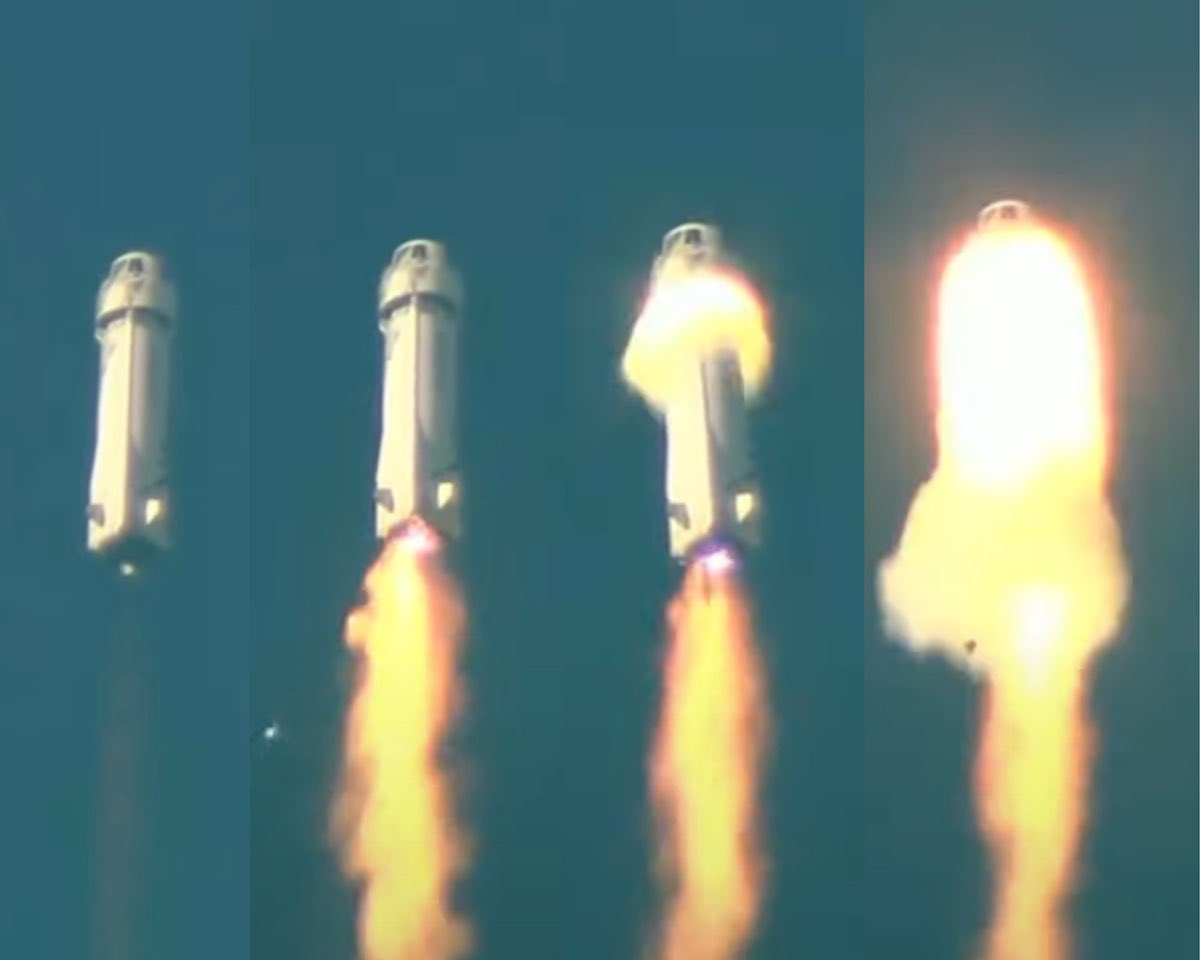
..there is room for a lot of speculation -- i did a frame by frame Picture - on the bottom row you can see some parts falling away. maybe the nozzle fell apart?!? pic.twitter.com/OOzPkPiX6G— Flo (@FloSpacenerd) September 12, 2022 El 13 de...
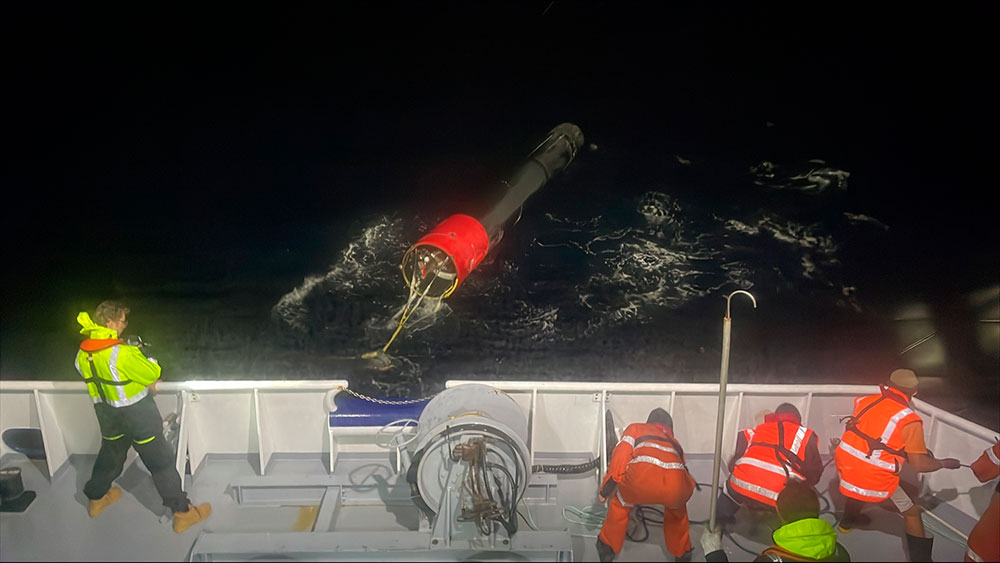
La primera etapa de la misión The Beat Goes On de una pieza en el agua – Rocket Lab Aunque al principio el cohete Electrón de Rocket Lab no iba a ser reutilizable en marzo de 2021 la empresa anunció que había...

Esta pasada noche, al tercer intento, Relativity Space consiguió por fin hacer el primer lanzamiento de su cohete impreso en 3D Terran 1. Todo fue bien hasta un poco después de la separación de la primera y la segunda etapas, cuyo...

El pasado 11 de diciembre la empresa japonesa ispace –que se llama casi igual que otra empresa china también relazionada con el espacio– lanzaba el aterrizador Hakuto-R con destino a la Luna. El Falcon 9 que lo lanzó lo colocó en...

Estaría bien que dieran datos acerca de la altitud máxima alcanzada, pero la empresa surcoreana Innospace afirma que el domingo 19 ha lanzado con éxito su demostrador suborbital HANBIT-TLV aún cuando el motor funcionó tan sólo 106 segundos frente a los...

Despegue del primer Zhuque-2 – Landspace El pasado 14 de diciembre la empresa china Landspace lanzaba su primer cohete Zhuque-2. Podía haberse convertido en el primero propulsado por metano y oxígeno líquidos (methalox) en entrar en órbita. Pero el lanzamiento falló por...

Hace unos días Rocket Lab completaba con éxito su segundo lanzamiento de un cohete Electrón desde los Estados Unidos. En concreto desde el Complejo de lanzamiento 2 del Espaciopuerto Regional del Atlántico Medio, situado en el Centro de Vuelo Wallops de...

Esta pasada noche SpaceX ha establecido un nuevo récord con el lanzamiento de dos Falcon 9 en poco más de cuatro horas. En concreto pasaron cuatro horas y doce minutos entre en lanzamiento de un Falcon 9 desde la Base de...

And…action! Check out my latest video of the #MarsHelicopter kicking up dust and taking off for Flight #47.Ingenuity is well beyond its “warranty” at this point, but has been zipping along with me, keeping up for as long as it can as...

Tal y como estaba previsto este mediodía la cápsula de carga Dragon 27 atracaba de forma automática en el puerto frontal del módulo Harmony de la Estación Espacial Internacional (EEI). Warren Hobugr supervisó la operación desde el interior de la Estación...

Cosmic Girl y el LauncherOne justo después de la suelta – Virgin Orbit Sorprendiendo aproximadamente a nadie –aquí ya llevamos meses hablando de su delicada situación económica– Virgin Orbit anunciaba ayer que cesa sus operaciones mientras busca opciones de financiación. También deja...

A principios del año pasado todo estaba listo para iniciar la campaña de lanzamiento del rover Rosalind Franklin de la Agencia Espacial Europea (ESA) rumbo a Marte. Pero la invasión rusa de Ucrania dio con todo al traste y obligó a...

En un acto celebrado en el Centro Espacial Johnson –la sede de su programa espacial tripulado– la NASA acaba de presentar los trajes con los que las tripulaciones del programa Artemisa volverán a la superficie de la Luna. Eso quiere decir...
La nube de partículas provenientes de la fuga de refrigerante de la Soyuz MS-22 – NASA TV El pasado 24 de febrero Roscosmos lanzó la cápsula Soyuz MS-23 para que sustituyera a la Soyuz MS-22, que perdió su refrigerante en un incidente...

Esta pasada noche SpaceX ha lanzado la cápsula de carga Dragon 27 hacia la Estación Espacial Internacional (EEI). Lleva a bordo unos 2.800 kilos de suministros para la tripulación de la Estación, para la Estación propiamente dicha, y material para experimentos...

El Miura 1 y un espaciotrastornado feliz – Wicho/Microsiervos Ayer tuve la oportunidad de ver con mis propios ojos –permitidme el pleonasmo– el primer cohete Miura 1 de PLD Space en su plataforma de lanzamiento en las instalaciones del INTA en El...

El Terran 1 durante el segundo intento de lanzamiento – Relativity Space A pesar de intentarlo hasta en dos ocasiones ayer también fue imposible para Relativity Space lanzar su cohete Terran 1. Es un lanzamiento que la comunidad espaciotrastornada sigue con mucho...
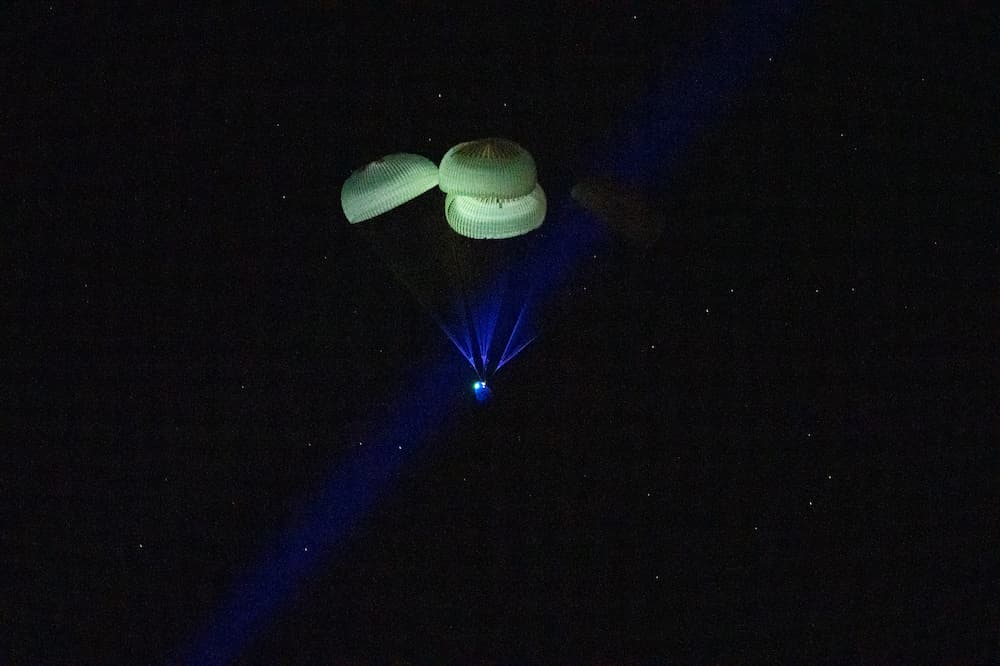
Splashdown!#Crew5 is back on Earth, completing a science mission of nearly six months on the @Space_Station. Their @SpaceX Dragon Endurance spacecraft touched down at 9:02pm ET (0202 UTC March 12) near Tampa off the coast of Florida. pic.twitter.com/nLMC0hbKY4— NASA (@NASA) March 12,...
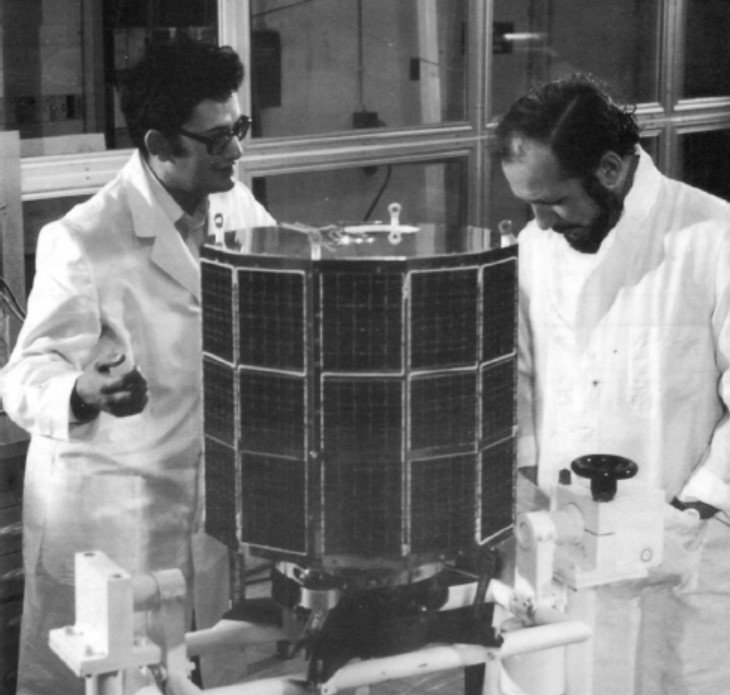
El Consejo de Ministros del pasado día 7 aprobó el Estatuto de la Agencia Espacial Española. Publicado en el BOE del 8 de marzo, entraba en vigor el día 9 de ese mismo mes. Según la referencia del Consejo de Ministros del...

Todo estaba listo en el Complejo de lanzamiento 16 de Cabo Cañaveral. Y la meteorología era buena. Pero problemas con la carga de propelentes en la segunda etapa del Terran 1 impidieron su lanzamiento inaugural, previsto para hoy. El Terran 1...

Aunque su nombramiento se había producido en diciembre desde el pasado 1 de marzo de 2023 Carole Mundell es la nueva directora de ciencia de la Agencia Espacial Europea (ESA). Asume también la dirección del Centro Europeo de Astronomía Espacial (ESAC). Según...

Hace unas horas la Agencia Japonesa de Exploración Aeroespacial (JAXA) llevaba a cabo el primer lanzamiento del cohete H3. Pero el motor de la segunda etapa no se encendió, con lo que desde el control de la misión no tuvieron más...

Según ha informado Roscosmos el revestimiento del asiento de Frank Rubio ha sido instalado hoy en el asiento correspondiente de la Soyuz MS-23. Los revestimientos de los asientos de Sergei Prokopyev y Dmitri Petelin ya habían sido instalados el pasado día 2...
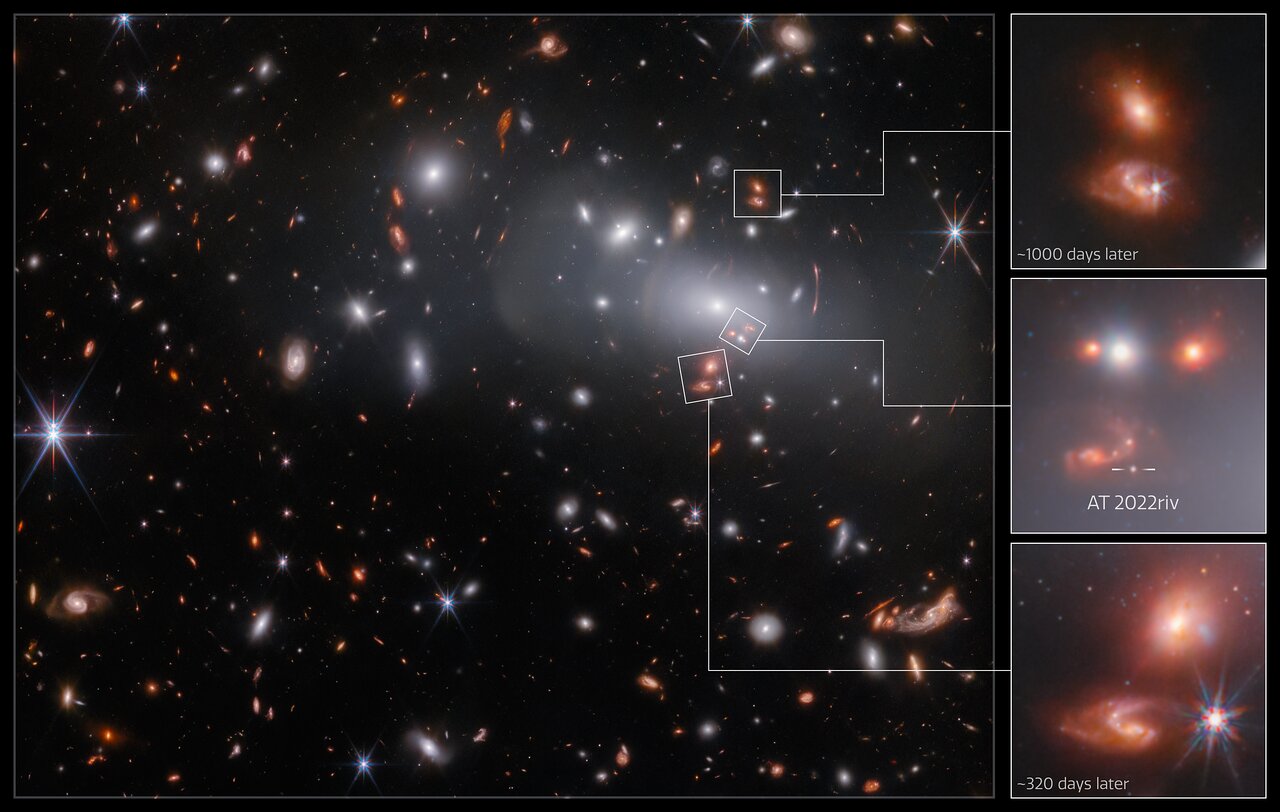
Efecto de la lente gravitacional en cúmulo RX J2129. Imagen: ESA/Webb, NASA & CSA, P. Kelly Esta foto resulta impactante cuando te das cuenta de la grandeza de lo que estás viendo: tres imágenes de la misma galaxia en la misma toma,...

Ayu Yoneda «saluda» a Makoto Suwa, quien no vive en Japón y no pudo estar en persona en la presentación – JAXA Esta semana la Agencia Japonesa de Exploración Aeroespacial (JAXA) anunció los nombres de las dos personas que ha escogido como...
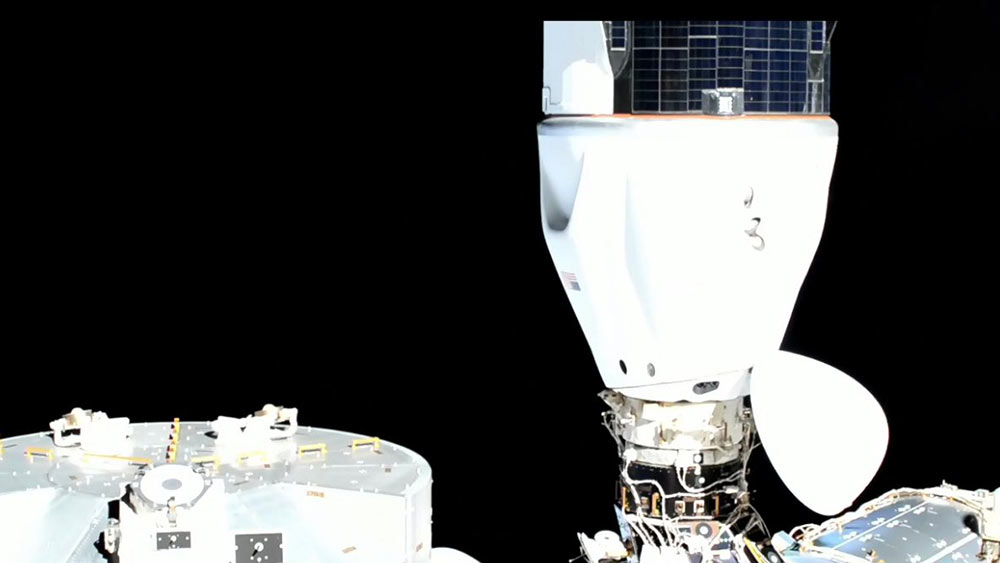
Desde hace unas horas la tripulación Crew-6 ya está en la Estación Espacial Internacional. Llegaron con algo de retraso porque un sensor defectuoso indicaba que uno de los ganchos que la Crew Dragon Endeavour utiliza para agarrarse a la Estación no...

Despegue de la misión fallida – ESA El pasado 2 de diciembre fallaba el lanzamiento de la primera misión regular de un cohete Vega-C de la Agencia Espacial Europea (ESA). Con ello se perdieron los satélites de observación terrestre Pléiades Neo 5...
Un motor Aether pierde fragmentos de la tobera durante las pruebas para localizar el origen del fallo – Astra El pasado 12 de junio un cohete Rocket 3 de Astra tenía que haber puesto en órbita dos satélites de la misión TROPICS...

Tras solucionar el problema con el equipo de tierra que obligó a cancelar el lanzamiento este pasado lunes a poco más de dos minutos de producirse hace un par de horas que la Crew Dragon Endeavour está en órbita con los...

Off to new places. For the past week or so, the #MarsHelicopter and I have been climbing northwest toward interesting ancient river deposits near a dune-filled crater up ahead. Track our progress: https://t.co/uPsKFhEY5J pic.twitter.com/WURsmYH9cP— NASA's Perseverance Mars Rover (@NASAPersevere) February 24, 2023...
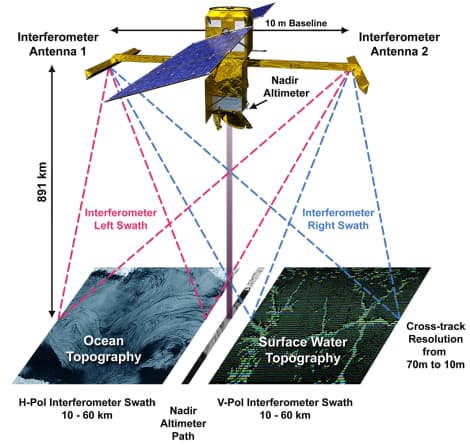
Impresión artística de SWOT en órbita - NASA Según se puede leer en el blog de la misión KaRIN, el instrumento principal del satélite medioambiental SWOT, ha fallado durante las primeras fases de su puesta en marcha y calibración. En concreto ha...

La NASA acaba de anunciar que, con efecto inmediato, Nicola Fox pasa a ser la directora de ciencia de la agencia. Sustituye en el puesto a Thomas Zurbuchen, que el año pasado decidió dejar el puesto tras seis años al frente de...

First Starlink v2 satellites reach orbit pic.twitter.com/0l08568mJ9— Elon Musk (@elonmusk) February 28, 2023 Esta pasada noche SpaceX ha lanzado el primer lote de satélites de segunda generación para su constelación Starlink de acceso a Internet. Aunque no son exactamente los que tenían...

La Endeavour en lo alto del cohete que la lanzará – SpaceX Todo parecía listo esta mañana en la plataforma 39A del Centro Espacial Kennedy para el lanzamiento de la tripulación Crew-6 hacia la Estación Espacial Internacional (EEI). Pero a poco más...

Esta pasada noche la cápsula Soyuz MS-23 atracaba sin problemas de forma automática en el módulo Poisk de la Estación Espacial Internacional (EEI). Con esto toda la tripulación de la EEI vuelve a disponer de una cápsula en la que dejar...

El primer Terran 1 en la plataforma de lanzamiento – Relativity Space Aparte del lanzamiento del Miura 1 de PLD Space otro lanzamiento especialmente interesante para el mes de marzo es el del primer Terran 1 de Relativity Space. Y lo es...
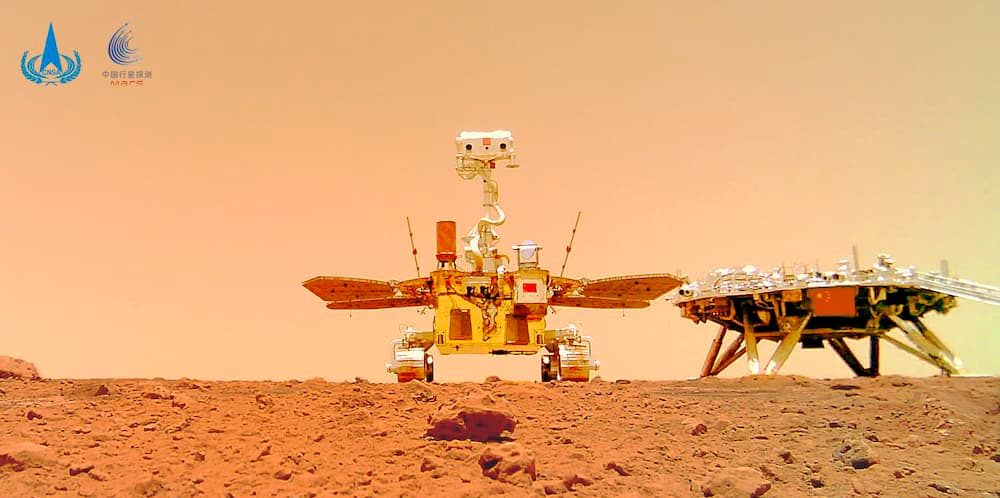
Zhurong visto por la cámara HiRISE de la Mars Reconnaissance Orbiter en marzo y septiembre de 2022 y en febrero de 2023 – NASA/JPL-Caltech/UArizona En mayo de 2022 la llegada del invierno a Marte obligó a poner en hibernación al rover Zhurong...
Tal y como estaba anunciado hoy ha salido el acceso anticipado de Kerbal Space Program 2, AKA una beta de toda la vida. Así que no todas las cosas funcionan. Ni están implementadas todas las funcionres prometidas. La nueva versión de...

Esta pasada noche Roscosmos ponía en órbita sin problemas la cápsula tripulada Soyuz MS-23. Sólo que en esta ocasión ha sido lanzada sin tripulación porque es la cápsula «de rescate» para Sergey Prokopyev, Dmitri Petelin y Frank Rubio, la tripulación de...
La plataforma de lanzamiento del Miura 1 – PLD Space Lanzar un cohete no es sencillo. Y menos si lo vas a hacer por primera vez. Pero a tenor de un tuit de Raúl Torres, uno de los fundadores de PLD Space,...
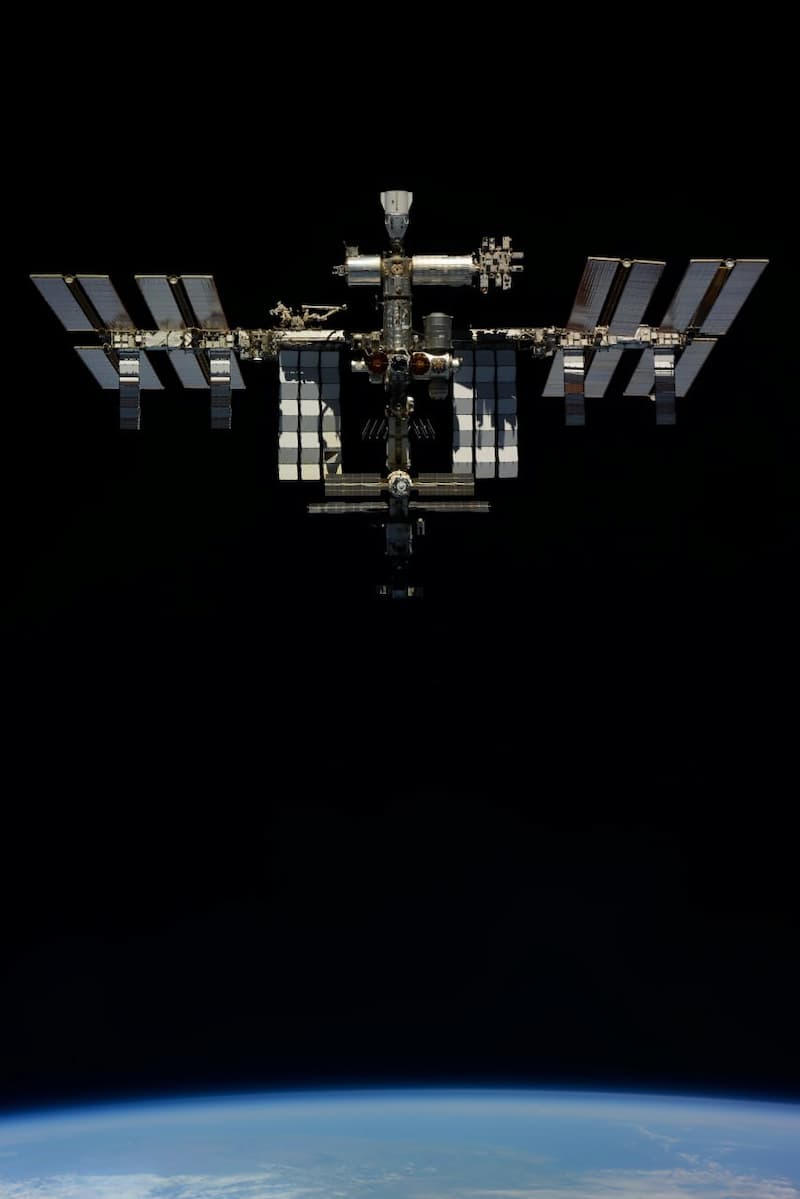
El Consejo Científico y Técnico de Roscosmos, la agencia espacial rusa, ha decidido apoyar el plan para mantener el segmento ruso de la Estación Espacial Internacional (EEI) en servicio hasta 2028 (enlace en ruso; DeepL te lo traduce). Sigue así el...

El agujero por el que se produjo la fuga de refrigerante en la Progress MS-21 – NASA/Roscosmos Aunque Roscosmos al principio dijo que no había observado ningún daño en el exterior de la cápsula de carga Progress MS-21 que justificara la pérdida...

La semana pasada el Parlamento Europeo aprobaba prácticamente por unanimidad –el proyecto recibió 603 votos a favor, seis en contra y 39 abstenciones – la creación de la red de comunicaciones segura vía satélite IRIS². La primera vez que mencioné esta...

Tonight, #ProgressMS21 undocked from the ISS and was rotated 180 degrees to take photos of the area of the coolant leak in the orbital module. Roscosmos reported that no visible damage was found. It was decided to not deorbit the ship right...

Cúmulo de Pandora, fotografía de NASA, ESA, CSA, I. Labbe (Swinburne University of Technology) y R. Bezanson (University of Pittsburgh) / Imagen Procesada por Alyssa Pagan (STScI). La NASA ha dado a conocer esta nueva imagen del cúmulo de Pandora obtenida con...

El lanzamiento inaugural del cohete japonés H3 ha sido abortado in extremis. Fue detenido después de que se encendieran los motores de la primera etapa pero antes de que se encendieran los propulsores de combustible sólido. Según la Agencia Japonesa de...

YOU asked, WE answered — Today, #VMSEve took to the skies above Mojave, CA. Virgin Galactic’s Director of Flight Test Kelly Latimer explains how and why we flight test following the completion of Eve's upgrades → https://t.co/cQgtnzFsIw pic.twitter.com/LcaAqB7oX7— Virgin Galactic (@virgingalactic) February...

Con todo lo que he leído y escrito sobre los transbordadores espaciales de la NASA no me sonaba de nada el OV-095, también conocido como el Transbordador fantasma. O, más formalmente, Shuttle Avionics Integration Laboratory, (Laboratorio de integración de aviónica del...

The @SpaceX platforms of #Phobos & #Deimos seem devoid of life these days. Not much happening! I look forward to when it starts ramping up again! @elonmusk pic.twitter.com/9ome3asYr1— Shane Overvold (@GoBamaRollTide) October 24, 2022 En el tuit insertado arriba, de octubre del...
Se puede ver el carenado de las antenas de conexión vía satélite de este 777 de Qatar en lo alto del fuselaje a la altura de la segunda puerta – Wicho Hace unos días surgió en una conversación el asunto de que...

El cohete que no lo consiguió - Virgin Orbit Virgin Orbit acaba de publicar los resultados de su investigación acerca del fallo del lanzamiento del Launcher One desde el Reino Unido el pasado 10 de enero en lo que era también el...

La tripulación de la misión Axiom Space Ax-2. De izquierda a derecha Peggy Whitson, John Shoffner, Ali AlQarni y Rayyanah Barnawi – NASA La NASA y Axiom Space acaban de hacer pública la composición de la tripulación de la misión privada Axiom...
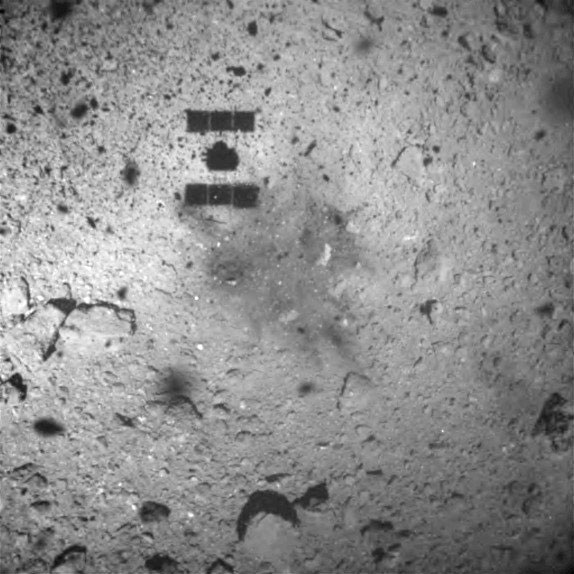
La sombra de Hayabusa 2 a 30 metros de altura mientras sube tras la primera toma de muestras – JAXA Hace poco se cumplían dos años de la llegada a la Tierra de la cápsula con las muestras del asteroide Ryugu que...

La Soyuz MS-23 tras sus pruebas de vacío – Roscosmos En las últimas horas Roscosmos ha decidido posponer unos días el lanzamiento de la cápsula «de rescate» Soyuz MS-23. El objetivo es realizar nuevas inspecciones en la cápsula. Así, en lugar de...

JUICE tras ser sacada de su contenedor de transporte. En la foto está tumbada de lado, con su lado superior apuntando hacia la izquierda de la imagen. En esta orientación se ven los paneles solares, plegados, arriba y abajo – ESA/CNES/Arianespace/Optique vidéo...

La Progress MS-21 en la Estación Espacial Internacional [Anotación en actualización] Según comunicaba Roscosmos hace unas horas el Centro de Control de la Misión ha detectado una despresurización en la cápsula de carga Progress MS-21. En concreto se trata de una fuga...

Un par de días después de su lanzamiento desde el Cosmódromo de Baikonur la cápsula de carga Progress MS-22 atracaba de forma automática en el puerto posterior del módulo Zvezda de la Estación Espacial Internacional (EEI). Ocupa el lugar dejado libre...

Views from drone of Booster 7's static fire test pic.twitter.com/KN4sk1nohf— SpaceX (@SpaceX) February 9, 2023 Esta semana SpaceX ha hecho una prueba de encendido estático de los 33 motores Raptor del Booster 7, la que previsiblemente será la primera etapa usada en...

La Progress MS-22 a su partida de la EEI - Roscosmos A primera hora de la mañana del 7 de febrero de 2023 terminaba la misión de la cápsula de carga Progress MS-20. Como es lo habitual, lo hizo con una reentrada...
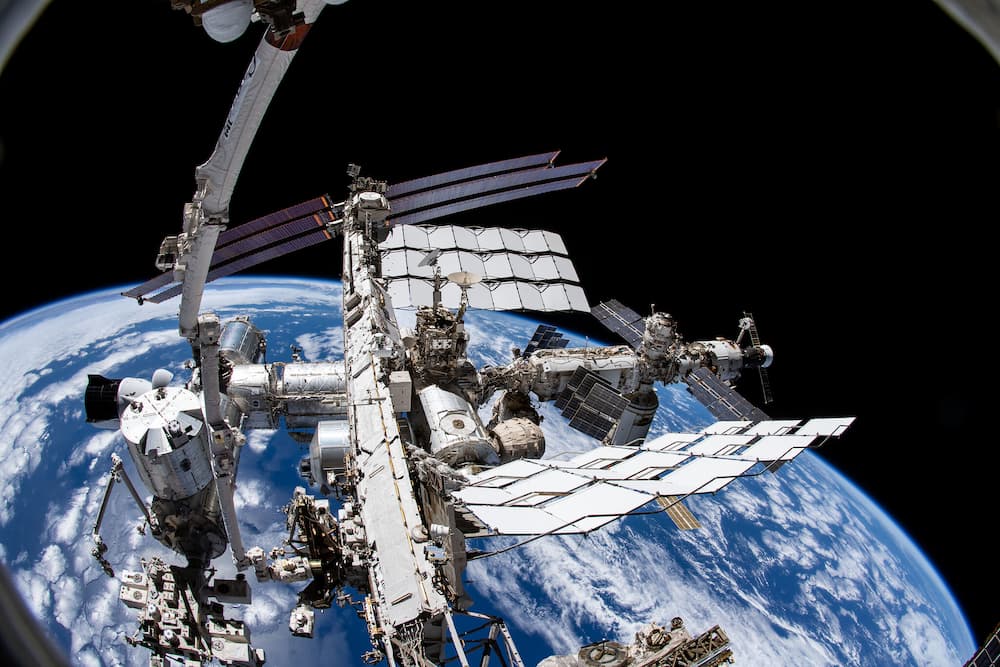
La EEI fotografiada durante un paseo espacial el 2 de diciembre de 2021 – NASA Esta mañana se ha llevado a cabo una reunión del comité de Jefes de Diseño de RSC Energia, la empresa que fabrica las Soyuz y las Progress...

#BREAKING: Incredible HD footage of the Chinese surveillance balloon being shot down#MyrtleBeach l #SC Watch incredible HD video of the moment when the Chinese surveillance balloon was shot down by a single missile from an F-22 fighter jet from Langley Air Force...

La NASA acaba de anunciar que Joe Acabá es a partir de ahora su astronauta jefe. Como tal dirige el cuerpo de astronautas de la agencia y es el principal asesor del director de la NASA en materia de formación y operaciones...
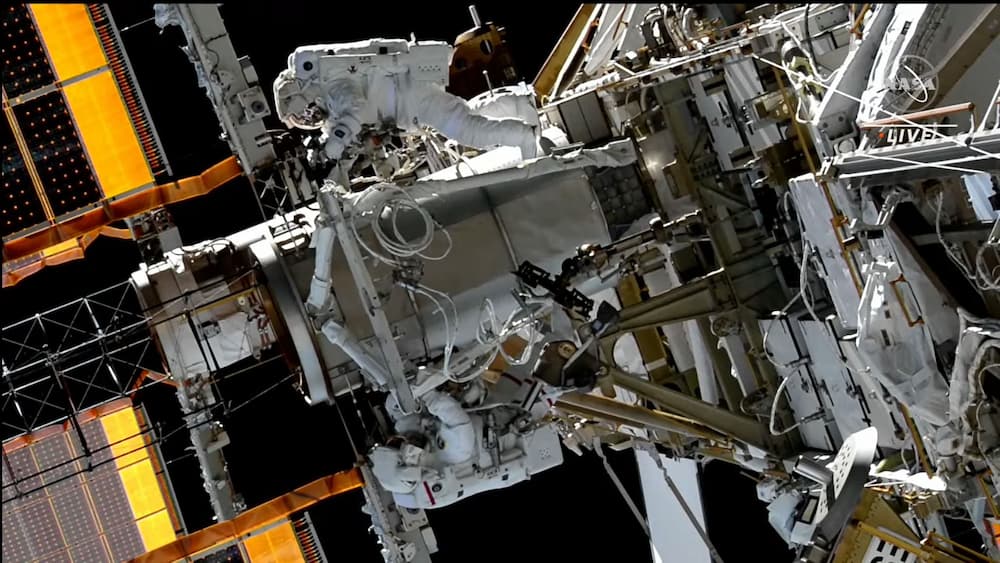
About five hours into today's spacewalk, astronauts @AstroDuke and @Astro_Wakata continue installing hardware to prepare the space station for its next roll-out solar array. https://t.co/yuOTrYNGst pic.twitter.com/tYARDvbUEJ— International Space Station (@Space_Station) February 2, 2023 En la tarde del pasado día dos Nicole Mann...

Esta mañana un Falcon 9 de SpaceX ponía en órbita el lote de satélites Starlink 5-3, compuesto por 53 unidades. Al ritmo que hace los lanzamientos la empresa casi no es noticia. Pero resulta que con el de esta mañana el...

Selfie de Perseverance con el décimo tubo de muestras. Si abres la imagen en grande seguramente serás capaz de ver el tubo número 9 – NASA/JPL-Caltech El décimo tubo de muestras sobre la superficie de Marte visto por la cámara Watson del...

Estuve leyendo en un artículo de Nature sobre lo complicado que es responder a la pregunta ¿Qué hora es en la Luna? cuando se necesita saber el dato exacto. Pero exacto, exacto. Y es que, claro, si en la Tierra ya...
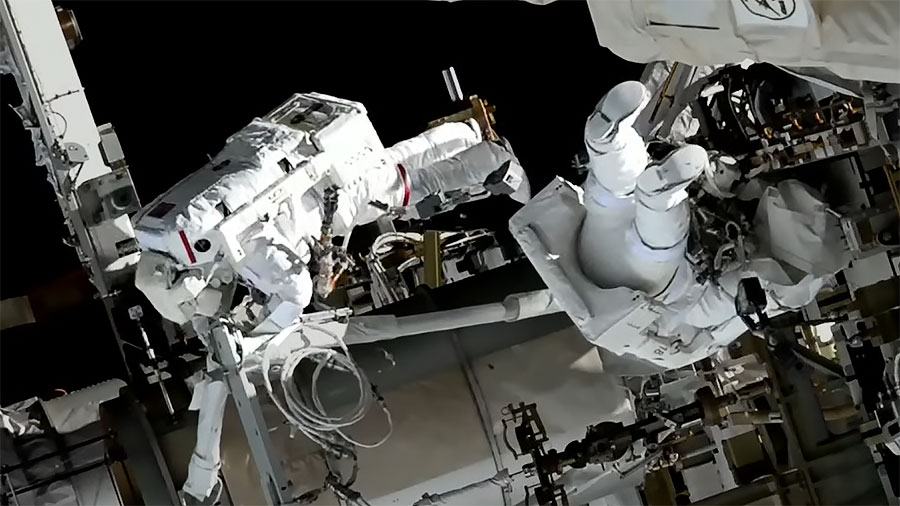
La semana pasada la astronauta de la NASA Nicole Mann y el astronauta de la Agencia Japonesa de Exploración Aeroespacial (JAXA) Koichi Wakata llevaron a cabo el primer paseo espacial del año en la Estación Espacial Internacional (EEI). Durante el paseo,...
Dr Space Junk vs The Universe: Archaeology and the Future. Por Alice Gorman. The MIT Press (22 de octubre de 2019). 238 páginas. Inglés. Cuando la autora tuvo edad para escoger carrera universitaria habría querido ser astrofísica. Pero en aquel entonces –principios...

Esta pasada noche, con muchos meses de retraso debidos básicamente a que la Fuerza Espacial de los Estados Unidos no acababa de tener listo el nuevo sistema de autodestrucción del sitio y porque los papeleos tienden a eternizarse, Rocket Lab ha...

Starship completed its first full flight-like wet dress rehearsal at Starbase today. This was the first time an integrated Ship and Booster were fully loaded with more than 10 million pounds of propellant pic.twitter.com/btprGNGZ1G— SpaceX (@SpaceX) January 24, 2023 Hace unas horas...

This is. #MarsHelicopter recently completed Flight 40. Ingenuity stayed aloft for 91.62 seconds, traveling 584 feet (178 meters) at an altitude of 33 feet (10 meters). https://t.co/FjF9IFKgtP pic.twitter.com/DPk8NkkuwX— NASA JPL (@NASAJPL) January 20, 2023 El pasado día 19 el helicóptero Ingenuity completaba...

Momento de la instalación de la placa – ESA/M.Pedoussaut Hoy he tenido la oportunidad de ver la sonda JUICE en persona, así como la de asistir a la dedicación e instalación de la placa en homenaje a Galileo que monta. A falta...
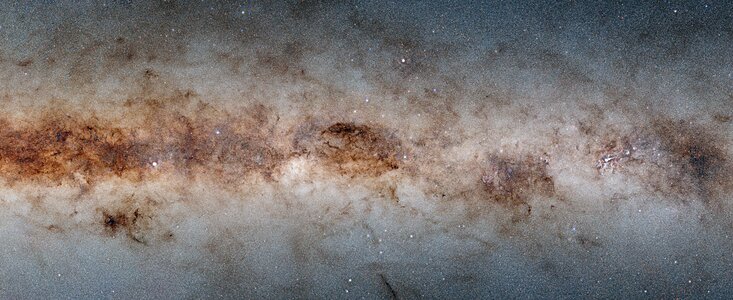
Esta nueva imagen del plano de la Vía Láctea ha sido montada a partir de 21.400 exposiciones con la Dark Energy Camera (DECam) como parte del proyecto DECaPS2. Contiene aproximadamente 3.320 millones de objetos celestes y ocupa unos 10 terabytes de...

Esta pasada noche SpaceX lazaba con éxito el quinto Falcon Heavy. Descontando el primer lanzamiento de uno de estos cohetes, que llevaba como carga el roadster de Elon Musk, este es el cuatro lanzamiento de un Falcon Heavy en una misión...
¿Cómo asegurar el dineral que cuesta fabricar un satélite, un telescopio espacial o cualquier otro artilugio que pueda enviarse al espacio y fallar miserablemente sin completar su misión? ¿Qué factores intervienen? ¿Es realmente un buen negocio? Si se piensa en ello...

So damn cool seeing the #CRS26 capsule come back with a brilliant firehall north of Crystal River, FL. First time getting to see the full return. Didn't expect to hear the sonic boom but about 2/3 minutes after splashdown it rumbled across...
La nube de partículas provenientes de la fuga – NASA TV Ha tardado, pero Roscosmos finalmente ha decidido que la cápsula tripulada Soyuz MS-22 no se puede utilizar más y que debe volver a Tierra sin tripulación. El pasado 15 de diciembre...

El primer RS1 durante sus últimos segundos de vuelo normal – ABL Space Systems Esta pasada noche ABL Space Systems hizo por fin el primer lanzamiento de su cohete RS1. Pero ha sido un lanzamiento fallido, ya que a los pocos segundos...

Esta pasada noche, con varios meses de retraso sobre las previsiones iniciales mientras la burocracia terminaba de girar sus engranajes para otorgar los permisos necesarios, Virgin Orbit lanzaba su primera misión desde fuera de los Estados Unidos, en concreto desde el...

Despegue de la misión Give Me Five – Galactic Energy Hace unas horas la empresa china Galactic Energy ponía en órbita su quinto cohete Ceres 1, que así encadena cinco lanzamientos consecutivos con éxito. En esta ocasión llevaba a bordo cinco satélites,...

Igual que sucediera en 2022, SpaceX ha inaugurado los lanzamientos espaciales de 2023. El primer lanzamiento del año en el mundo entero ha sido el de la misión Transporter-6, que ha puesto en órbita 114 satélites de distintas empresas y países....
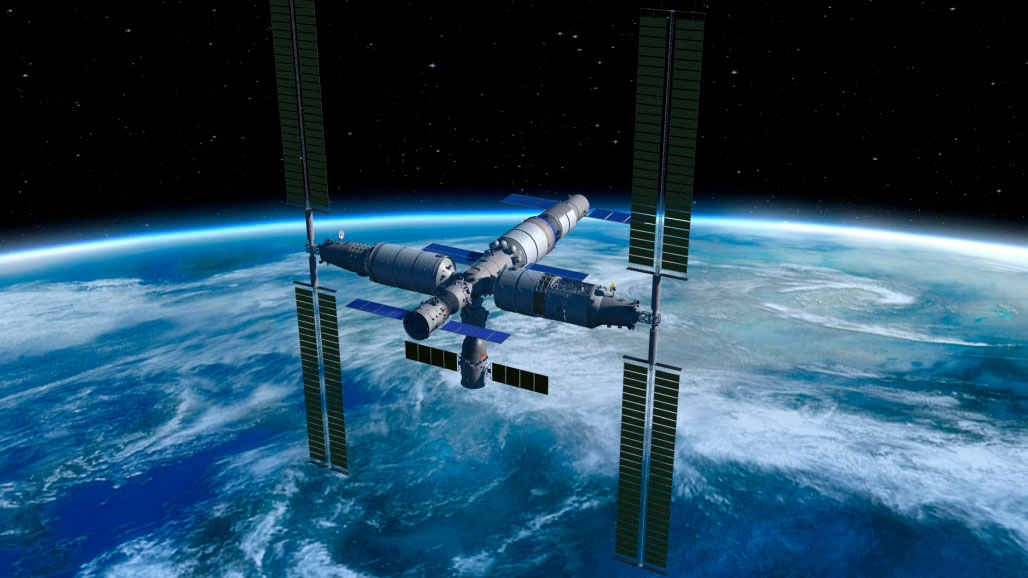
El primer lanzamiento orbital del año – SpaceX Salvo sorpresa de última hora 2022 va a terminar con 186 lanzamientos orbitales. De ellos 178 han terminado con éxito, 7 han fallado, y una ha terminado en un fallo parcial. Ya sea contando...
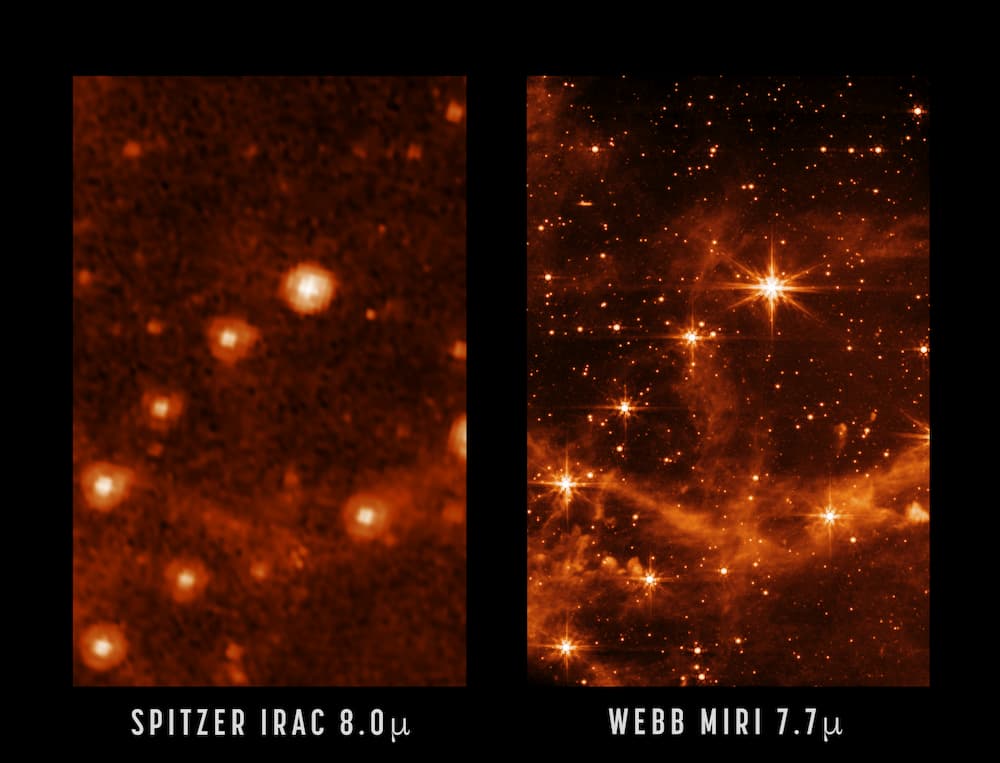
Se acerca el final de año y llega el momento de las recopilaciones. Así que hemos desempolvado algunos datos de la página de estadísticas para ver qué fue lo más popular del año pasado en Microsiervos. Estas son las cinco anotaciones más...
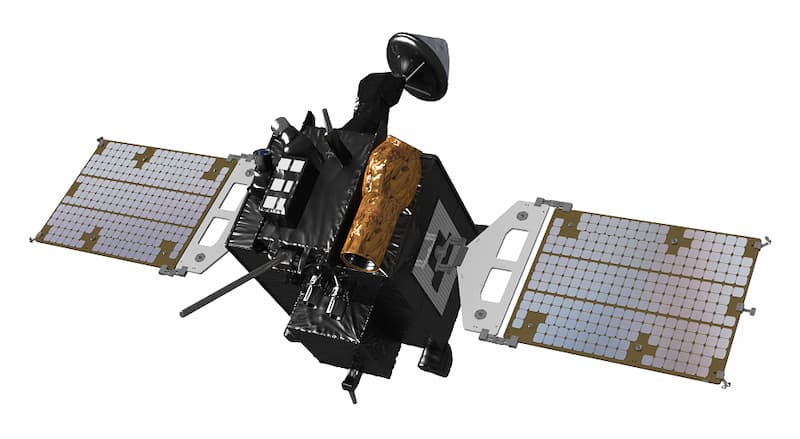
Mi coreano es más bien limitado pero en el vídeo de arriba se pueden ver imágenes de los preparativos del lanzamiento y de la trayectoria que ha seguido la sonda lunar Danuri de Corea del Sur, que acaba de entrar en...

Hace unos minutos un Falcon 9 de SpaceX ponía en órbita 54 satélites de la constelación Starlink de acceso a Internet. La órbita a la que van destinados, de 530 kilómetros de altitud y 43 grados de inclinación respecto al ecuador,...
La nube de partículas provenientes de la fuga – NASA TV Roscosmos había anunciado que hoy daría a conocer los resultados de los análisis que dos grupos de trabajo han llevado a cabo sobre la Soyuz MS-22. Pero lo que han dicho...

En el vídeo Exploring China's Tiangong space station el periodista chino Wu Lei hace una visita guiada por un modelo 3D la estación espacial china Tiangong que si bien no es muy extensa sí permite hacerse una idea de cómo están...
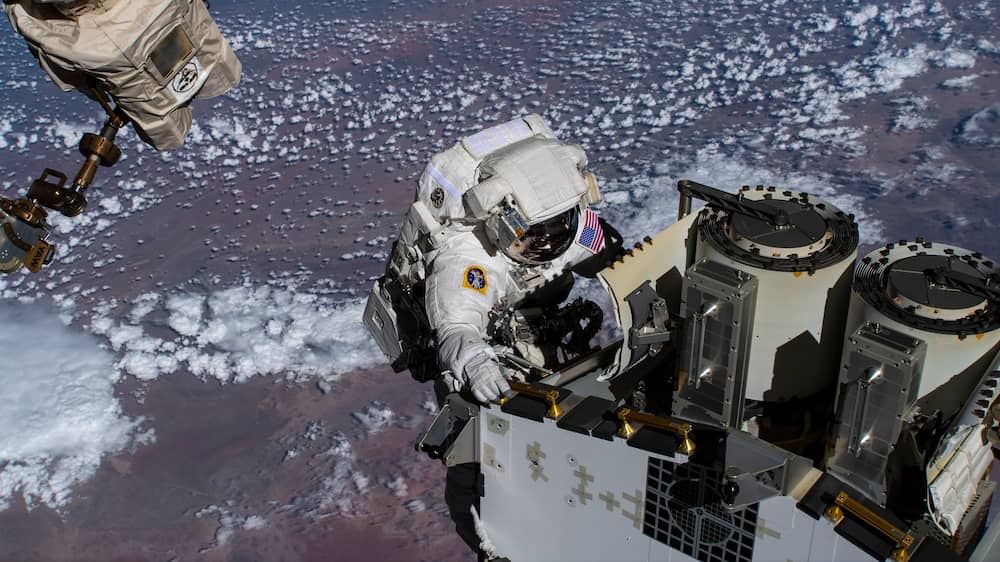
Power up: New solar cells from @Spectrolab_Inc are seeing the sun for the first time from space as the fourth advanced array is unfurled on orbit. Twice as powerful as the original cells, the new cells will add to the electricity produced...

Blue Origin acaba de publicar este vídeo acerca del BE-4, el motor que lleva años desarrollando para su cohete New Glenn y que también será utilizado en el Vulcan de United Launch Alliance. Es un pedazo de bestia capaz de producir...

La Soyuz MS-22 está a la derecha del todo en esta imagen; a su izquierda está el módulo Nauka con el módulo esférico Prichal en su extremo – NASA/Josh Cassada Joel Montalbano, director del Programa de la Estación Espacial Internacional para la...

El primer tubo de muestras sobre la superficie de Marte visto por la cámara Watson del rover. La imagen sirve no sólo para ver que en efecto el tubo está sobre el suelo de Marte sino también para comprobar que no ha...
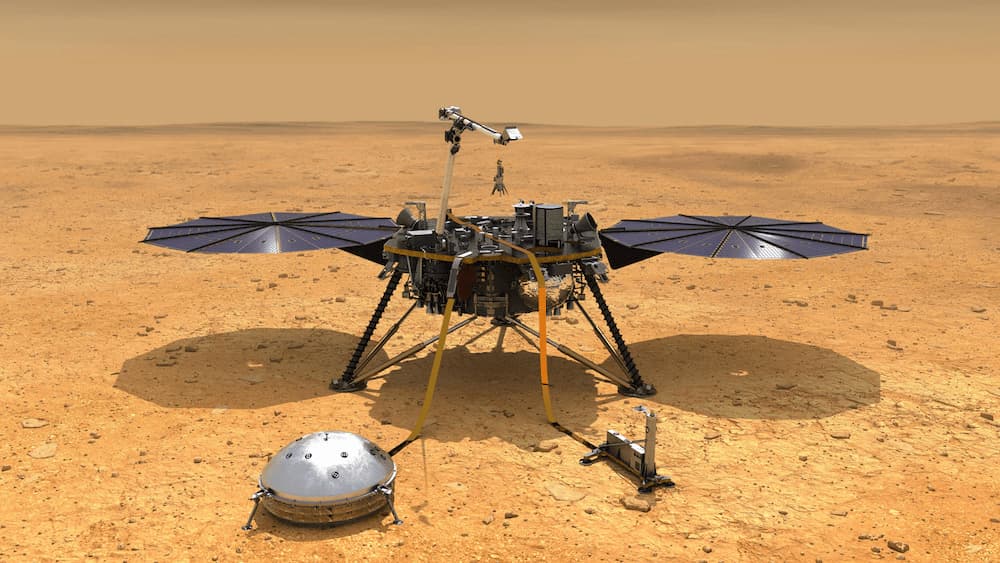
My power’s really low, so this may be the last image I can send. Don’t worry about me though: my time here has been both productive and serene. If I can keep talking to my mission team, I will – but I’ll...

La EEI vista desde la Crew Dragon Endeavour durante su partida el 8 de noviembre de 2021 - NASA En la Estación Espacial Internacional las cosas se planean con mucho tiempo. Pero últimamente no dejan de surgir imprevistos que dan al traste...
Esta pasada noche el cohete Vega-C de la Agencia Espacial Europea, operado por Arianespace, tenía que haber llevado a cabo su primer lanzamiento comercial. El objetivo era poner en órbita los satélites de observación terrestre Pléiades Neo 5 y 6. Pero...

Esta pasada noche SpaceX ha lanzado otro lote de satélites de la constelación Starlink de acceso a Internet. Casi no es novedad porque van 33 lanzamientos de este tipo este año. Pero la primera etapa del Falcon 9 que los puso...
La nube de partículas provenientes de la fuga – NASA TV Dos días después de la fuga de refrigerante de la cápsula tripulada Soyuz MS-22 la información sigue llegando con cuentagotas. Pero es un asunto muy importante porque además de ser la...

Esta pasada noche a las 23:24, hora peninsular española (UTC +1), un Falcon 9 de SpaceX ponía en órbita dos satélites de telecomunicaciones O3b mPOWER de la operadora SES. Son los primeros de un total de 11 que van a formar...

Un Falcon 9 de SpaceX que ha despegado del Complejo de Lanzamiento Espacial 4E (Space Launch Complex 4E, SLC-4E) de la Base de la Fuerza Aérea de Vandenberg en California acaba de poner en órbita el satélite medioambiental SWOT, de Surface...

Esta pasada noche Sergey Prokopyev y Dmitri Petelin estaban preparándose para un paseo espacial en el que el objetivo era instalar en su sitio el radiador del módulo Nauka de la Estación Espacial Internacional (EEI). Pero cuando aún no habían salido...

Esta mañana la empresa china Landspace ha lanzado su primer cohete Zhuque-2 (ZQ-2), que ha sido el primer cohete orbital propulsado por metano y oxígeno líquidos (methalox) en despegar de la historia. Lamentablemente el lanzamiento ha fallado, parece ser que por...

Eugene Cernan durante uno de los paseos espaciales sobre la superficie de la Luna de la misión – NASA A las 23:54, hora peninsular española, del 14 de diciembre de 1972 el módulo de ascenso del módulo lunar Challenger de la misión...
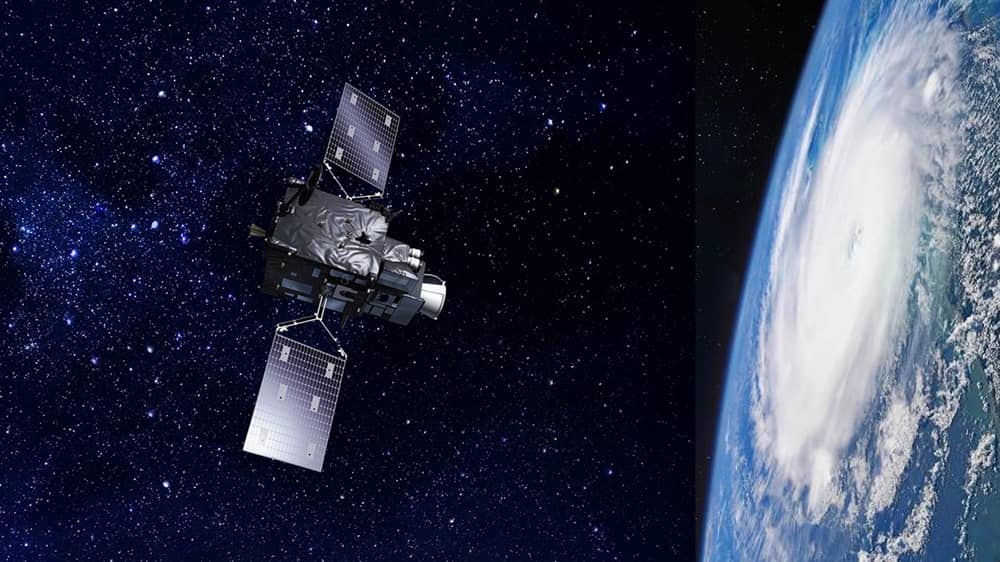
Un Ariane 5 –el antepenúltimo de la historia– acaba de poner en órbita el primer satélite Meteosat de tercera generación. Lo acompañaban los Intelsat Galaxy 35 y 36 como cargas secundarias, que se separaron de la etapa superior del cohete unos...

Impresión artística de la lunar Gateway. La esclusa con la que podrían participar los UAE está a la izquierda de la cápsula Orión – NASA Con las relaciones con Roscosmos, la agencia espacial rusa, cuando menos tensas a causa de la invasión...

El Kuaizhou-11 protagonista del lanzamiento poco después de su despegue - CASIC El pasado día 7 un cohete Kuaizhou-11 (KZ-11) ponía en órbita el satélite Hangtian Jinzu 1 de la constelación Xingyun Jiaotong VDES Shiyan de la Internet de las cosas. Fue...

¡Bienvenida a casa!@NASA_Orion amerizó a las 12:40 p.m. EST (1740 UTC) en el Océano Pacífico frente a la costa de California, finalizando la misión de 25 días y medio de Artemis I. pic.twitter.com/Vj42V4a8uJ— NASA en español (@NASA_es) December 11, 2022 Amerizaje. De...

Hace unas horas un Falcon 9 de SpaceX lanzaba hacia la Luna el aterrizador Hakuto-R de la empresa japonesa ispace –no confundir con la empresa china del mismo nombre– que tiene como objetivo convertirse en la primera misión privada en aterrizar...

Imagen AS17-148-22727 del archivo de la NASA, también conocida como La canica azul El 7 de diciembre de 1972, unas cinco horas después del lanzamiento, la tripulación del Apolo 17 tomaba la foto que hoy conocemos como La canica azul, que por...

En 2017 el multimillonario japonés Yusaku Maezawa compró un viaje alrededor de la Luna a bordo de una Crew Dragon a SpaceX. Pero para cuando esto se hizo público en 2018 el plan ya era hacer el viaje en un Spaceship,...

Aunque son competencia indirecta de Starlink la pela es la pela y esta pasada noche un Falcon 9 de SpaceX ponía en órbita un lote de 40 satélites de la constelación de acceso a Internet de OneWeb. OneWeb tenía contratado el...
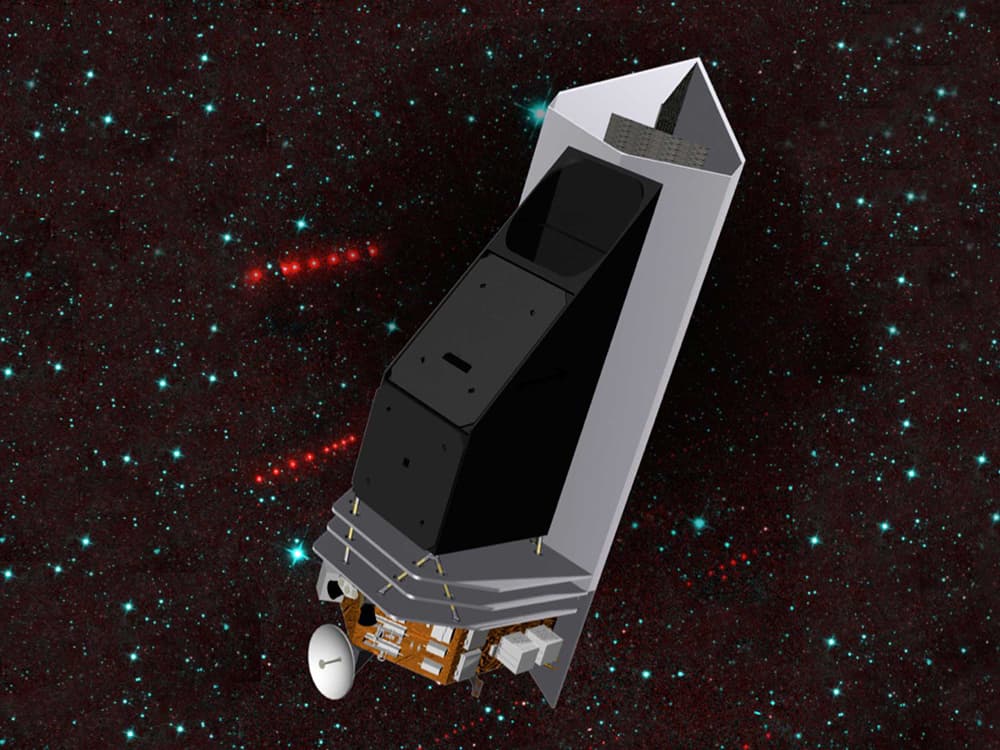
Impresión artística de NEO Surveyor en el espacio – NASA/JPL-Caltech La misión NEO Surveyor de la NASA acaba de pasar lo que la agencia llama Key Decision Point C (KDP-C, Punto clave de decisión C). Eso quiere decir que la agencia considera...

Es sabido que si un día llega «el asteroide» e impacta en algún lugar habitado de nuestro planeta podemos darnos por jodidos. Neal Agarwal ha creado un Simulador de impactos de asteroides con bastante detalle que muestra todas estas posibilidades simulando...
La broca para recogida de regolito de Perseverance montada en el cabezal de su taladro – NASA/JPL-Caltech/ASU Perseverance, el rover de la NASA que recorre el cráter Jezero en Marte, acaba de obtener su primera muestra de regolito marciano. Para ello ha...
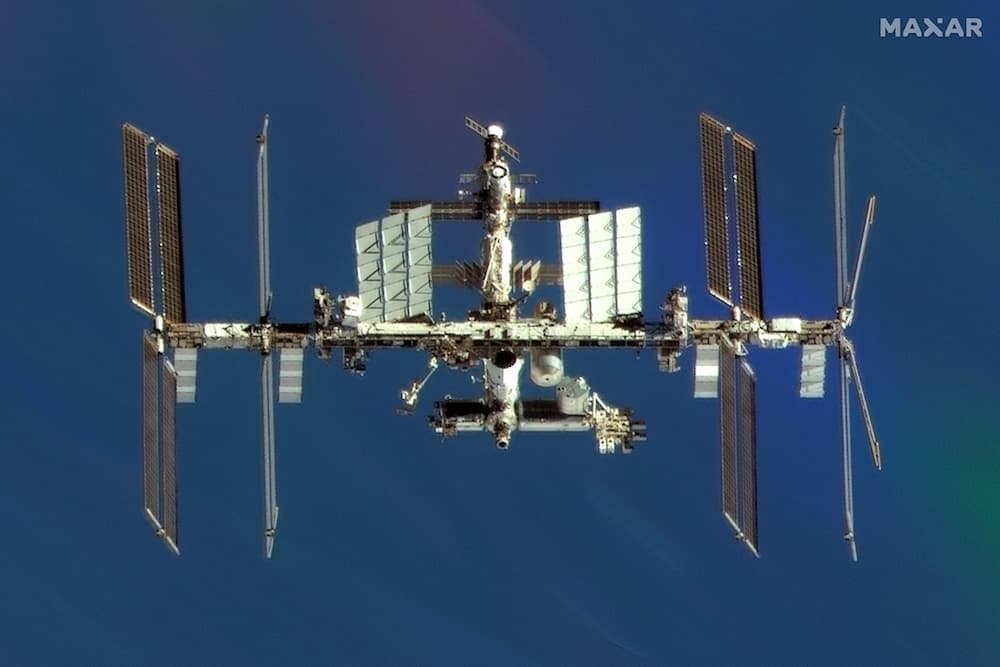
La Estación Espacial Internacional fotografiada por el WorldView-3 el 3 de septiembre de 2022 – Maxar Maxar acaba de anunciar que la Oficina Nacional de Administración Oceánica y Atmosférica (NOAA), que es quien tiene autoridad sobre estas cosas en los Estados Unidos,...

La Tierra vista desde la cápsula Orión de la misión Artemisa I, que ya viaja de vuelta hacia ella – NASA Hace unas horas la cápsula Orión de la misión Artemisa I encendía su motor principal para, con la ayuda de la...
El #CMin acuerda la sede de la Agencia Espacial Española en Sevilla y la sede de la Agencia Española de Supervisión de la Inteligencia Artificial en A Coruña.La desconcentración de organismos públicos fortalecerá la igualdad de oportunidades.Nos lo cuenta @isabelrguez pic.twitter.com/mA8Bht9VVM— La...

Este mediodía la cápsula tripulada china Shenzhou 14 se posaba en la zona de aterrizaje de Donfeng, en Mongolia, poniendo fin a su misión. Lo único reseñable es que el paracaídas no se soltó automáticamente, por lo que el persona del...

The roll-out solar array successfully unfurled to its full length of 60 feet after its installation today on the station's Starboard-4 truss segment. https://t.co/yuOTrZ4Jut pic.twitter.com/ALLugDOTh2— International Space Station (@Space_Station) December 3, 2022 Los astronautas de la NASA Josh Cassada y Frank Rubio...

Una pasada del BlueWalker 3 sobre el observatorio de Kitt Peak – KPNO/NOIRLab/IAU/SKAO/NSF/AURA/R. Sparks Tal y como era de suponer debido a su antena de 64 metros cuadrados el satélite BlueWalker 3 de AST SpaceMobile, que tiene como objetivo ofrecer cobertura de...

Sergei Prokopyev y Dmitri Petelin trabajando en los Orlán – Roscosmos El pasado día 25 estaba previsto que Sergei Prokopyev y Dmitri Petelin llevaran el paseo espacial en el que el radiador del módulo Nauka de la Estación Espacial Internacional sería finalmente...

Impresión artística de la estación espacial china con la Shenzhou 15 acoplada a su puerto frontal, la Shenzhou 14 al puerto inferior, y el carguero Tianzhou 5 al puerto posterior; en esta configuración todos los puertos de atraque disponibles están ocupados -...

Selfie desde el punto más lejano a la Tierra de la misión – NASA A última hora de ayer la cápsula Orión de la misión Artemisa I alcanzaba su distancia máxima de la Tierra cuando llegó a los 432.194 km de distancia...

La promoción de 2022 – ESA La semana pasada la Agencia Espacial Europea (ESA) daba a conocer los nombres de las personas que entraban a formar parte de su nueva promoción de astronautas. Y reconozco que, a pesar de que España ha...
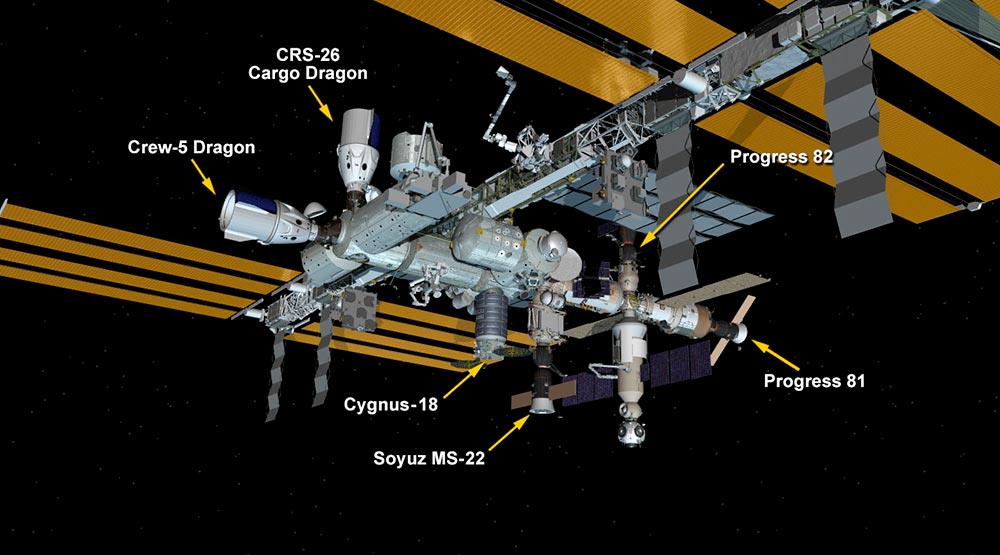
La Estación Espacial Internacional tras la llegada de la Dragon 26 – NASA Unas 18 horas después de su lanzamiento la cápsula de carga Dragon 26 ha llegado a la Estación Espacial Internacional (EEI). Como es lo habitual con estas cápsulas, atracó...

La Tierra vista desde la Orión tras pasar por el lado oculto de la Luna el pasado día 21 – NASA TV Esta pasado noche la cápsula Orión de la misión Artemisa I de la NASA usaba su motor proncipal para modificar...
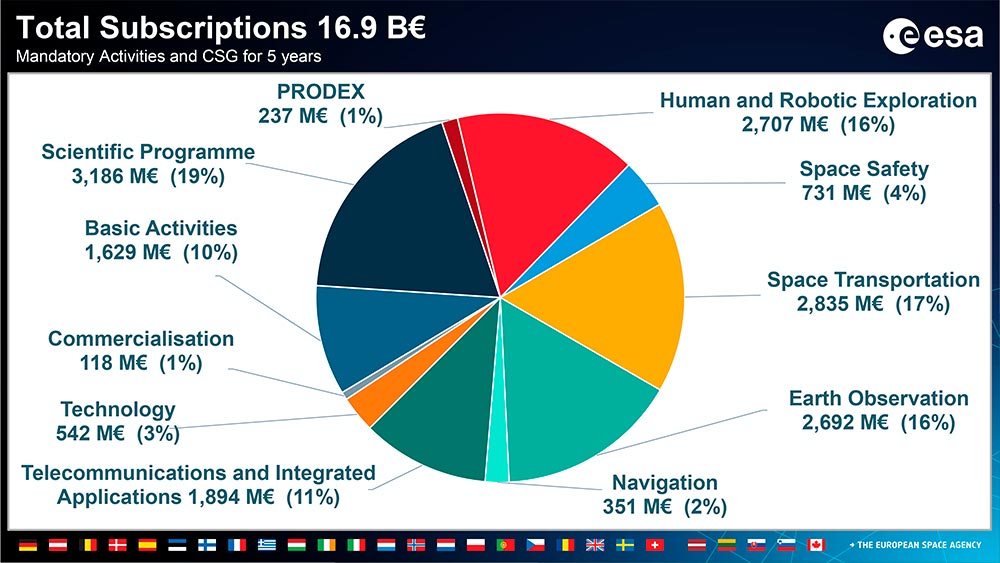
Distribución de inversiones de la Agencia Espacial Europea en los próximos cinco años – ESA Además de presentar su nueva promoción de astronautas, la Agencia Espacial Europea estaba pendiente esta semana de otro evento muy importante –más importante, diría yo– como es...

La promoción de 2022 – ESA [Anotación en actualización] La Agencia Espacial Europea acaba de presentar su nueva promoción de astronautas. Es la primera desde 2009. Formarán parte del cuerpo de astronautas activos, de la reserva, e incluye un astronauta con una...

La Crew Dragon freedom, que iba a ser la última en ser construida, atracada en la Estación Espacial Internacional durante su primera misión – NASA En marzo de este año SpaceX dijo que no iba a construir más cápsulas tripuladas Crew Dragon;...
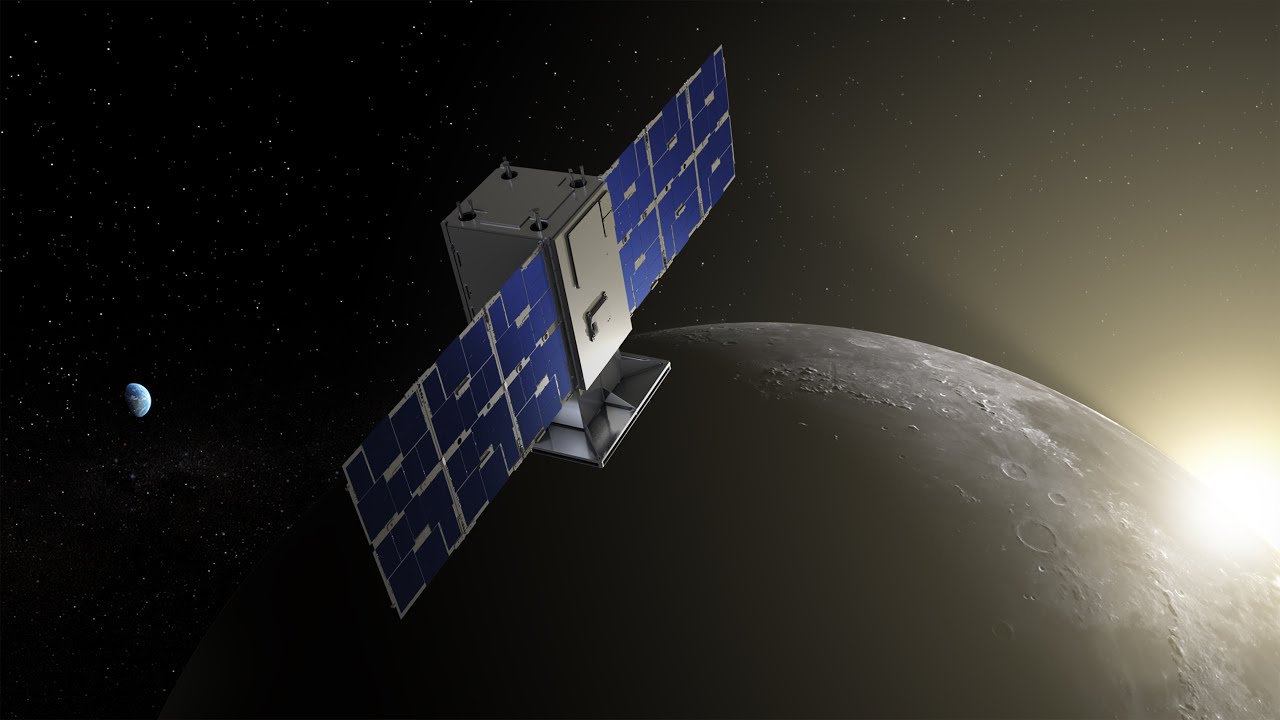
Impresión artística de CAPSTONE en órbita – NASA Después de su maniobra de inserción orbital alrededor de la Luna de la semana pasada y unos últimos ajustes, la sonda CAPSTONE acaba de comenzar su misión, que consiste en explorar la futura órbita...

[Must-watch] Thanks to the 15m long robotic arm by connecting the 10m Tianhe arm & 5m Wentian arm, we're able to have a close look of the 3-module assembly of China Space Station with two spacecrafts (Shenzhou-14 and Tianzhou-5), from astronaut CHEN...

Prokopyev y Petelin trabajando en el radiador – NASA En mayo de 2010 el transbordador espacial Atlantis llevó el radiador del módulo Nauka a la Estación Espacial Internacional en la misión STS-132. Como Nauka aún no estaba lanzado el radiador quedó instalado...
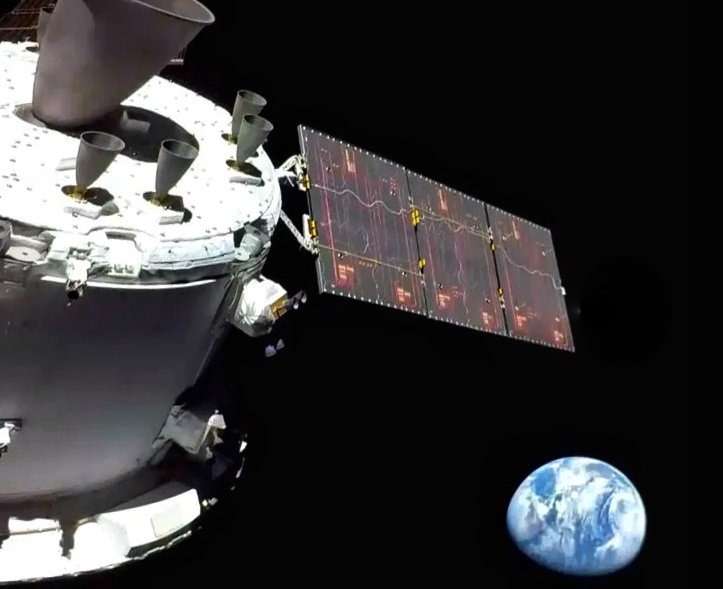
La Tierra vista desde la cápsula Orión de la misión Artemisa I – NASA Planet Earth from Orion es la Astronomy Picture Of the Day de hoy. En ella se ve la Tierra desde una distancia de unos 92.000 kilómetros captada por...

Impresión artística –probablemente ya desfasada– de un HLS aterrizando en la Luna – SpaceX La NASA acaba de anunciar que ha adjudicado a SpaceX la construcción del aterrizador de la misión Artemisa 4. Este aterrizador es un poco como el Guadiana, porque...

The Space Launch System has roared to life, launching the @NASA_Orion spacecraft on its journey for #Artemis I! Look out Moon, we are on the way! pic.twitter.com/0LFWexJhcC— NASA_SLS (@NASA_SLS) November 16, 2022 Con un retraso de casi 45 minutos sobre el horario...
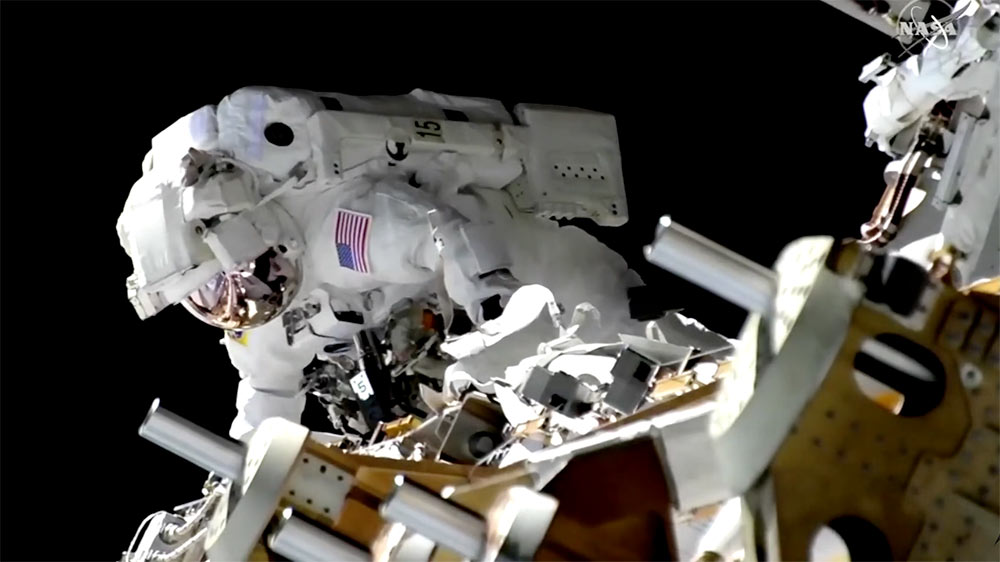
Loas astronautas de la NASA Josh Cassada y Frank Rubio protagonizaron esta tarde un paseo espacial de siete horas y once minutos durante el que dejaron casi instalado un kit adaptador para la instalación de un nuevo panel solar desenrollable iROSA...

El VSS Unity en su último vuelo hasta la fecha el 11 de julio de 2021 – Virgin Galactic Hace unos días Virgin Galactic presentaba sus resultados del tercer trimestre de este año [PDF] y también hablaba de sus planes de futuro....

Zona en la que se ha desprendido el sellado – NASA Detalle del sellado dañado – NASA Tras analizar el riesgo que supone para el lanzamiento que se haya desprendido parte del sellado entre el sistema de escape de la cápsula Orión...
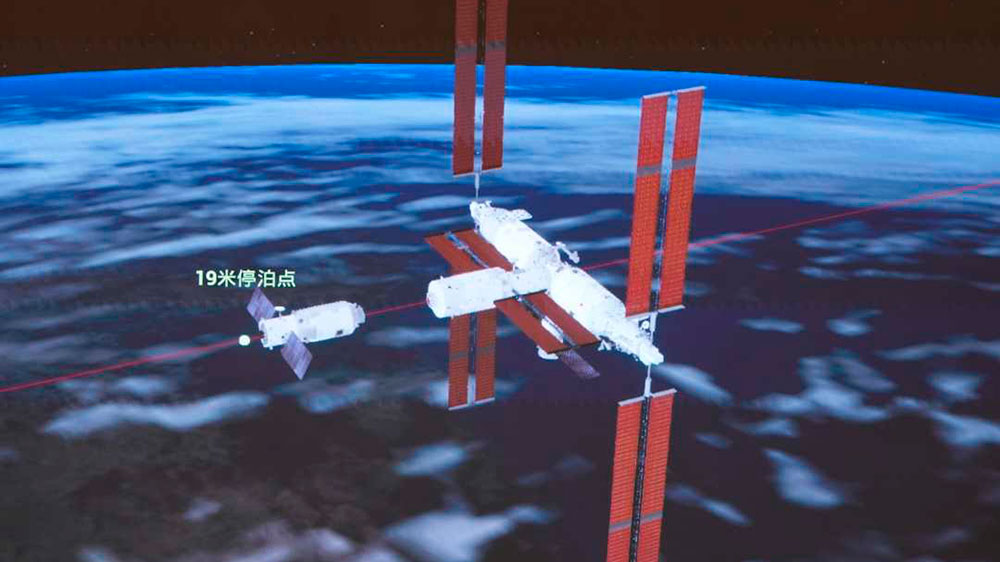
Terminada su misión en la estación espacial china, el carguero espacial Tianzhou 4 se desacoplaba de ella a las 7:55, hora peninsular española (UTC +1), del 9 de noviembre de 2022. Una reentrada controlada en la atmósfera esta pasada noche terminaba...

History is unfolding! We've deployed #BlueWalker3's 693-square-foot array, which is now the largest-ever commercial communications array in low Earth orbit.Read more about this important milestone here: https://t.co/4kupfxn3vO pic.twitter.com/KnE9CeWOCT— AST SpaceMobile (@AST_SpaceMobile) November 14, 2022 AST SpaceMobile, dentro de su objetivo de crear...

El X-37B número 1 tras su tercera misión –Boeing Lanzado el 6 de mayo de 2020 en su sexta misión, el avión espacial X-37B volvía a tierra el 12 de noviembre de 2022 tras una misión récord de 908 días en el...

Looking through today's visit out on the launch pad I believe you can see the 10 feet of RTV delamination on the east side of #Orion #Artemis1 from #HurricaneNicole discussed in tonight's NASA briefing. #NASA #SLS @manumazzanti pic.twitter.com/KuDLzydVQu— Scott Schilke (@SchilkeScott) November...
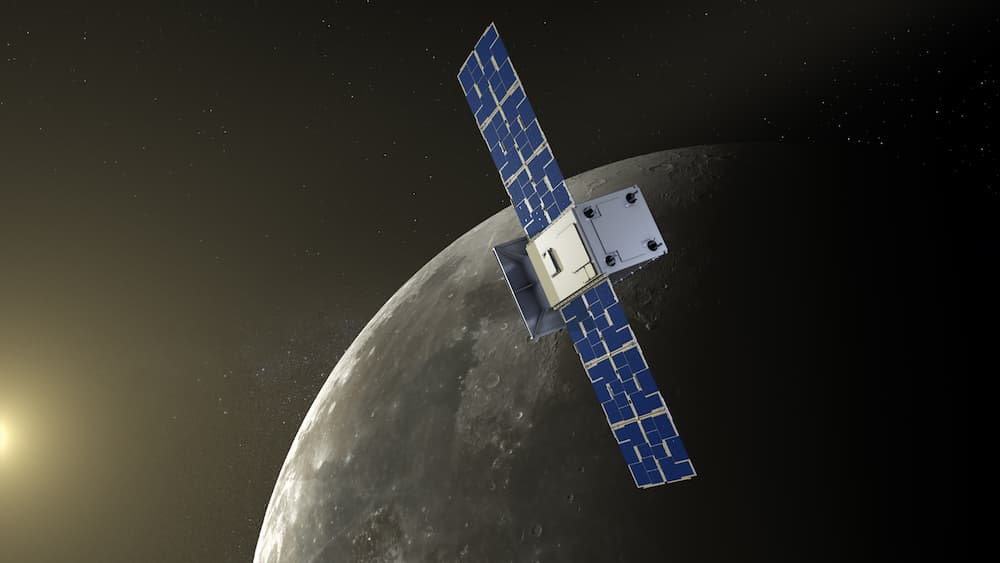
Impresión artística de CAPSTONE en órbita alrededor de la Luna – NASA Tras un accidentado viaje en el que se perdieron las comunicaciones con ella y luego quedó dando tumbos tras una maniobra de corrección de trayectoria, la misión CAPSTONE de la...

Impresión artística del JPSS-2 en órbita - NOAA Esta semana el último cohete Atlas V que despegará de la costa oeste de los Estados Unidos ponía en órbita el satélite medioambiental JPSS-2. El lanzamiento se llevó a cabo sin problemas, aunque durante...

Esta pasada noche, tan sólo dos horas y siete minutos después de su lanzamiento, lo que es un récord de velocidad para este tipo de naves, el carguero espacial Tianzhou 5 se acoplaba al puerto posterior del módulo Tianhe de la...

El SLS en la plataforma de lanzamiento tras el paso de Nicole – NASA Una vez analizados los datos e inspeccionados el cohete SLS, la cápsula Orión, la torre y la plataforma de lanzamiento, y los demás sistemas asociados tras el paso...

Este pasado verano el equipo de una serie ¿documental? sobre el Triángulo de las Bermudas descubría unos restos de unos siete metros mientras grababa escenas frente a la costa de Florida. Les pareció que podían ser restos del transbordador espacial Challenger....

Esta mañana, como carga secundaria en el lanzamiento del satélite medioambiental JPSS-2, la NASA y United Launch Alliance (ULA) ponían en órbita y recuperaban, aparentemente con éxito, el escudo térmico hinchable Low-Density Supersonic Decelerator (LOFTID, Prueba de vuelo en órbita baja...

Nicole poco antes de tocar tierra en Florida – NASA/NOAA-20 Tal y como estaba previsto el huracán Nicole alcanzó hace unas horas su máxima aproximación al Centro Espacial Kennedy (KSC), dónde el cohete SLS que tiene que lanzar la misión Artemisa I...

Al final el panel solar que no se quiso desplegar no fue mayor problema y la cápsula de carga Cygnus 18 «S. S. Sally Ride» por fin está en la Estación Espacial Internacional (EEI). Fue capturada a las 11:20, hora peninsular...
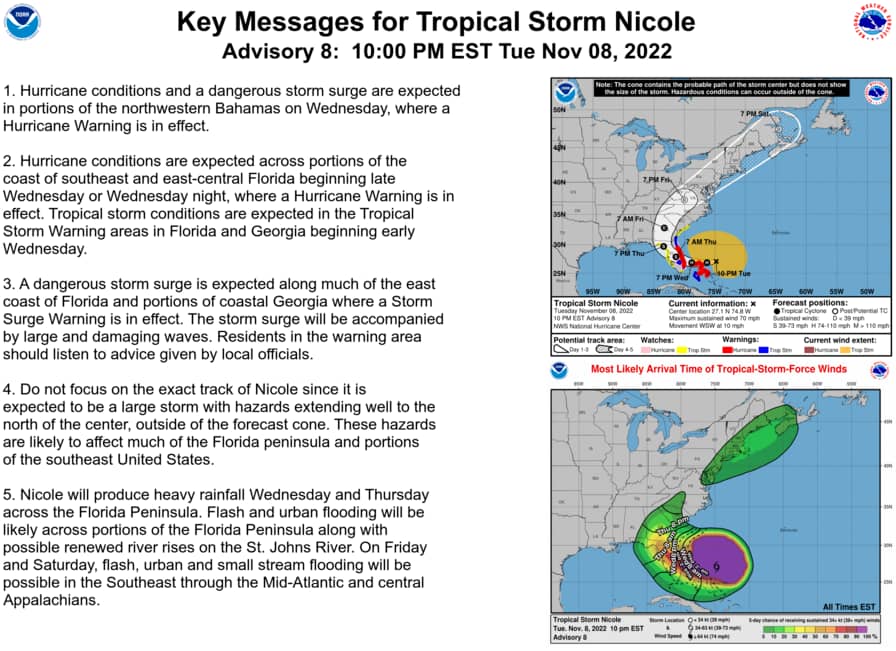
Previsión más reciente de la evolución de la tormenta subtropical Nicole – Centro Nacional de Huracanes La NASA anunciaba hace unas horas su decisión de posponer el intento de lanzamiento de la misión Artemisa I hacia la Luna del día 14 al...

Barry «Butch» Wiltmore entrenándose en un simulador de la Starliner – Boeing En mayo del este año, tras un muy sonoro fracaso en diciembre de 2019, y después de tener que cancelar el lanzamiento en el verano de 2021, Boeing conseguía por...
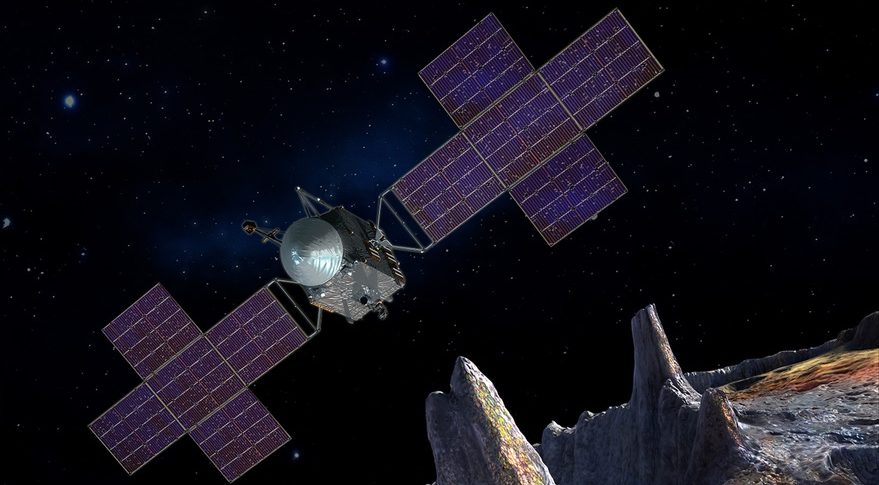
Impresión artística de la sonda Psyche en órbita alrededor del asteroide Psyche – NASA/JPL-Caltech La sonda Psyche de la NASA tenía que haber sido lanzada este año, como muy tarde a principios de octubre. Pero como no estuvo lista a tiempo lo...

El SLS en la plataforma de lanzamiento – NASA/Joel Kowsky Después de que el huracán Ian causara un retraso de más de un mes en el lanzamiento de la misión Artemisa I de la NASA hacia la Luna la agencia vuelve a...
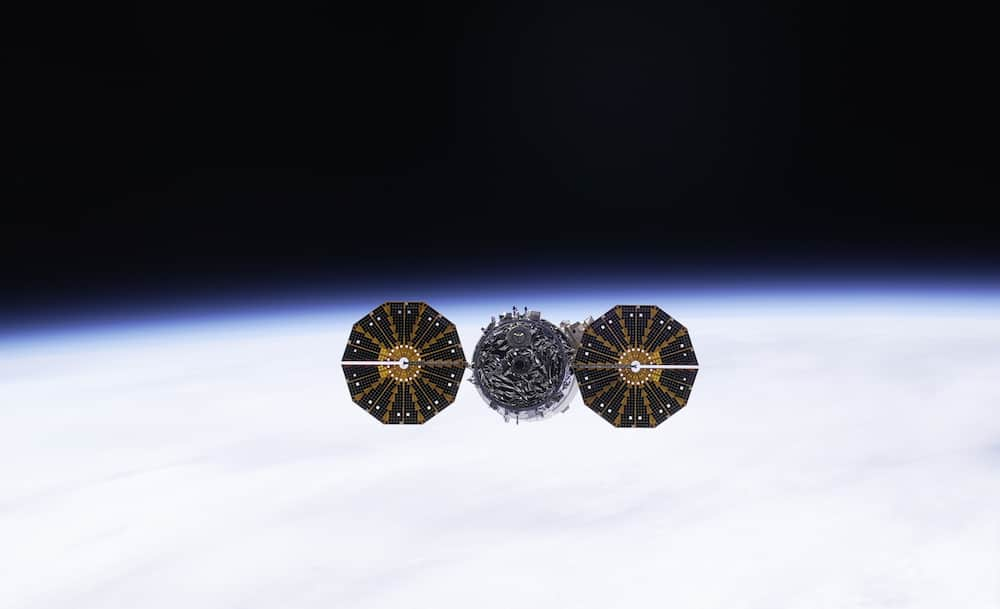
La Cygnus 18 «S.S. Sally Ride» tras su captura por el brazo robot de la Estación Espacial Internacional – Koichi Wakata/JAXA/NASA La saga de la cápsula de carga Cygnus 18 «S. S. Sally Ride» gana otro capítulo después de lo de la...

Tras un lanzamiento sin problemas y sin alarmas de incendio que interfirieran, la cápsula de carga Cygnus 18 «S. S. Sally Ride» despegaba hace unos minutos del espaciopuerto Wallops de Virginia y ya está en órbita rumbo hacia la Estación Espacial...

La «Sally Ride» en lo alto del Antares 230 que la va a poner en órbita – Patrick Hendrickson/Northrop Grumman Esta mañana estaba previsto el lanzamiento de la cápsula de carga Cygnus NG-18 «Sally Ride» rumbo a la Estación Espacial Internacional (EEI)....

Stunning views from our 9th trip to orbit this yearMissed the launch? Watch the replay: https://t.co/l2tnbzl9XL pic.twitter.com/bblQJapMwk— Rocket Lab (@RocketLab) November 6, 2022 Hace unas horas Rocket Lab lanzaba su novena misión de este año. Bautizada Catch Me If You Can, su...

El SLS de vuelta en la plataforma de lanzamiento – NASA/Joel Kowsky Desde hace unas horas el primer cohete SLS de la NASA vuelve a estar en la plataforma de lanzamiento 39B del Centro Espacial Kennedy para intentar de nuevo lanzar la...
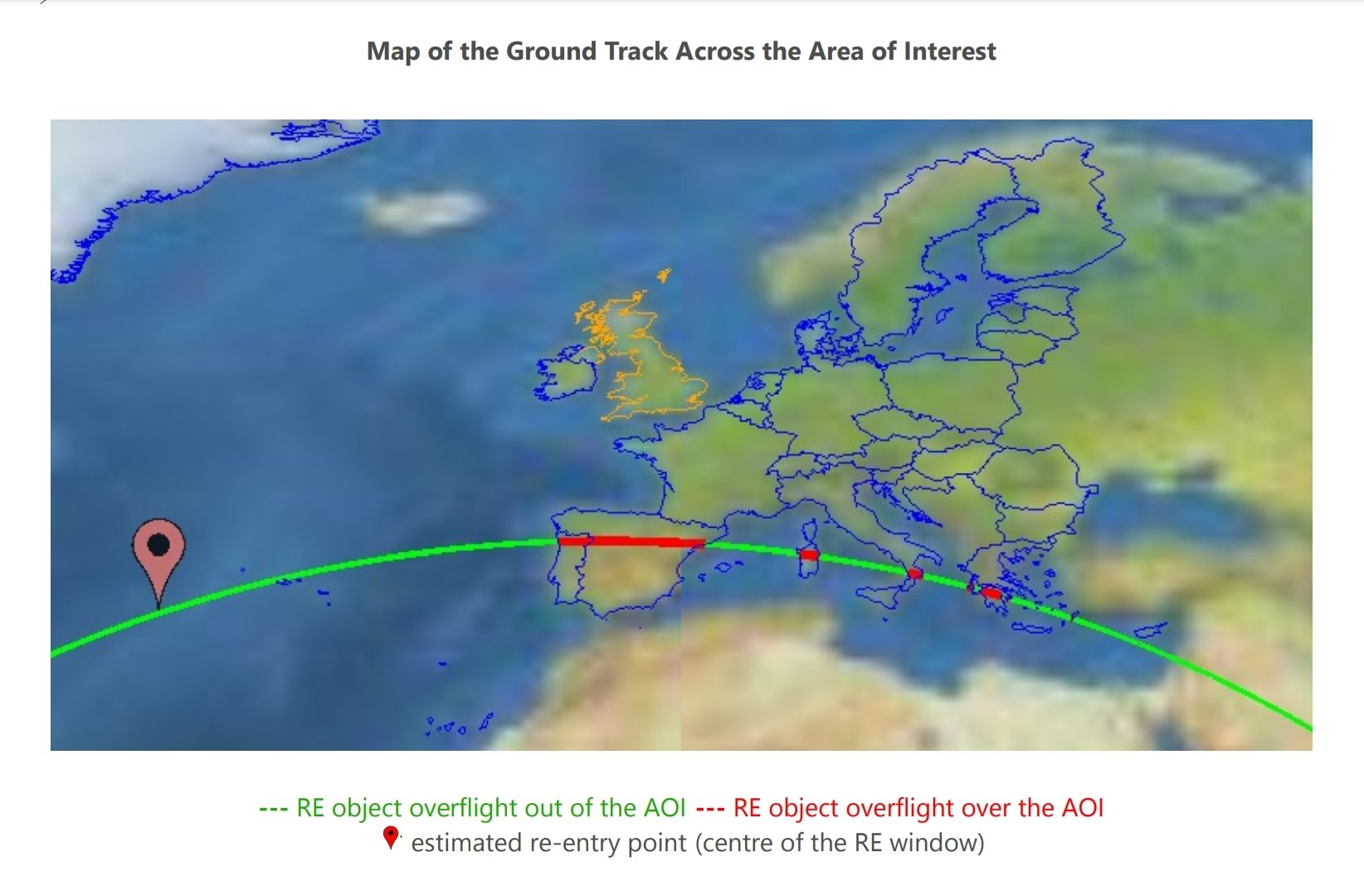
Eurocontrol informa de la reentrada no controlada de un cohete chino en la atmósfera. Se ha establecido Rate Cero para determinadas zonas de espacio aéreo español y ello puede afectar al tráfico aéreo en forma de retrasos en tierra y desvíos de...
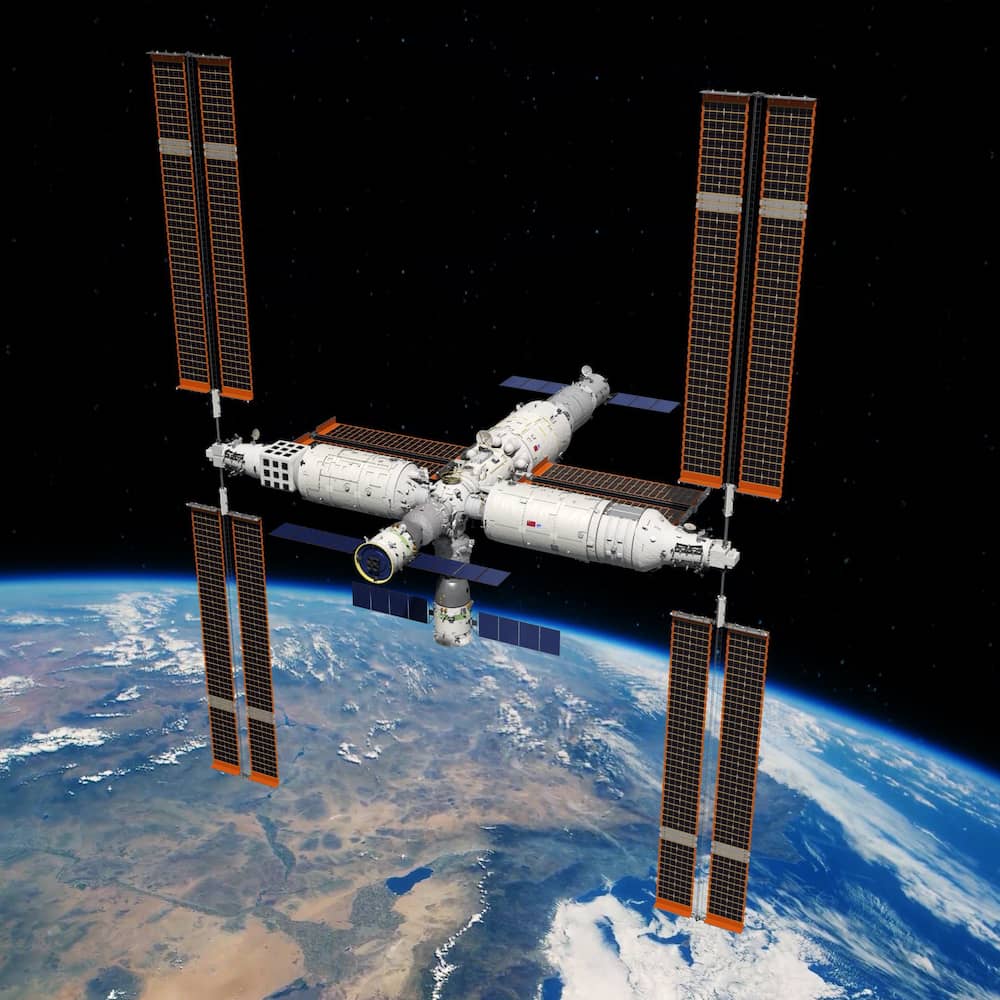
Hace unas horas que el módulo Mengtian de la estación espacial china está en su ubicación definitiva en el puerto de atraque izquierdo (de babor en términos náuticos) del módulo principal Tianhe. Había llegado a la estación el 31 de octubre...

Falcon Heavy’s side boosters have landed – marking the 150th and 151st recovery of orbital class rockets pic.twitter.com/vK4ZdfDQtX— SpaceX (@SpaceX) November 1, 2022 Algo más de tres años después de su anterior lanzamiento, SpaceX lanzaba hace unas horas un Falcon Heavy. Es...

Un cohete Larga Marcha 5B ponía en órbita en la mañana del 31 de octubre de 2022 el módulo laboratorio Mengtian de la estación espacial china. Es el tercero y en principio último de los módulos de su estación espacial. Es...

La EEI vista desde la Soyuz MS-18 – Oleg Novitskyi/Roscosmos Hace unas semanas saltó la noticia de que Rusia iba a abandonar la Estación Espacial Internacional (EEI) en 2024. Pero en esta casa aclaramos que lo único que le había dicho Yuri...
Algo más de sos días después de su despegue desde el Cosmódromo de Baikonur la cápsula de carga Progress MS-21 se acoplaba hace unas horas de forma automática al módulo Poisk de la Estación Espacial Internacional (EEI). A bordo del compartimento...
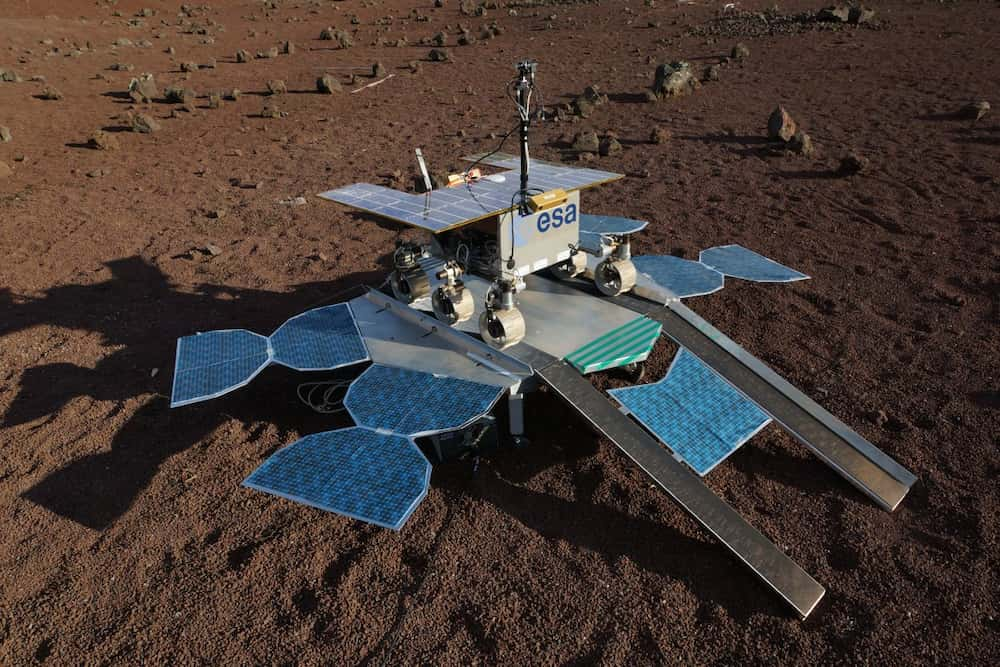
Impresión artística de Rosalind Franklin y Kazachock recién aterrizados en Marte, algo que ya nunca veremos – ESA/Roscosmos El Consejo de la Agencia Espacial Europea (ESA), en su última reunión, recién celebrada, ha decidido pedir a los ministros del ramo, que se...

A look inside Asia's biggest rocket assembly building #SpaceChina #SpaceLog pic.twitter.com/237FGOBsEt— CGTN Global Business (@CGTNGlobalBiz) October 25, 2022 Toda persona con un mínimo de espaciotrastorno querría poder visitar el Vehicle Assembly Building (VAB, Edificio de ensamblado de vehículos). Es el descomunal edificio...

La Progress MS-19 al poco de su partida de la Estación Espacial Internacional – Roscosmos Esta pasada madrugada terminaba la misión de la cápsula de carga Progress MS-19. Como siempre, con una reentrada controlada en la atmósfera sobre una zona remota del...

Despegue de la misión – OneWeb Esta pasada noche NewSpace India Limited (NSIL), la división comercial de la ISRO, la agencia espacial india, ponía en órbita un lote de 36 satélites de acceso a Internet de OneWeb. Con él la empresa ya...

La espera ha sido larga pero por fin parece que tiene fin: según acaban de anunciar Private Division e Intercept Games, Kerbal Space Program 2 saldrá en lo que denominan acceso anticipado el 24 de febrero de 2023. Lo del acceso...

Cornwall, your packages have been delivered. All moving parts including Cosmic Girl and LauncherOne have safely arrived at @SpaceCornwall from California. Our crew is working hard to prepare for our first-ever overseas mission in the UK. Stay tuned. #CountdownToCornwall pic.twitter.com/oMrgwIzueq— Virgin Orbit...
Josef Aschbacher, el director general de la Agencia Espacial Europea (ESA) acaba de confirmarlo: el primer lanzamiento del nuevo cohete Ariane 6 se retrasa al menos hasta el último trimestre de 2023. Con suerte. Con suerte porque para ello en el...

NASA’s #LucyMission completed its 1st Earth Gravity Assist, passing just 220 miles/350 km above Earth’s surface!In 2 years, Lucy will return for a 2nd gravity assist, which will let it reach the main asteroid belt & observe asteroid Donaldjohanson. https://t.co/rOFSJXtk9D pic.twitter.com/fpB8wUiLHZ— NASA...

Amerizaje de la Freedom – NASA/Bill Ingalls – NASA/JPL-Caltech Tras varios días de retraso debidos a la mala meteorología reinante, finalmente un amerizaje de la cápsula tripulada Crew Dragon Freedom a las 22:50 del pasado viernes puso fin a la misión Crew-4...

Impresión artística del observatorio en órbita Un cohete Larga Marcha 2D ponía en órbita hace unos días el observatorio solar espacial chino ASO-S, también conocido como Kuafu-1. ASOS-S viene de Advanced Space-based Observatory - Solar, Observatorio solar espacial avanzado; Kuafu, por su...

View from the droneship of Falcon 9’s launch and landing pic.twitter.com/5yYvT9bNcL— SpaceX (@SpaceX) October 12, 2022 Este vídeo recoge en medio minuto los algo menos de nueve minutos que pasaron entre el lanzamiento de un Falcon 9 con los satélites Intelsat G-33...
Impresión artística del lanzamiento de un Starship tripulado – SpaceX SpaceX acaba de anunciar que Dennis Tito, el primer turista espacial de la historia, ha contratado un viaje alrededor de la Luna con la empresa. Junto a él volarán su mujer Akiko...
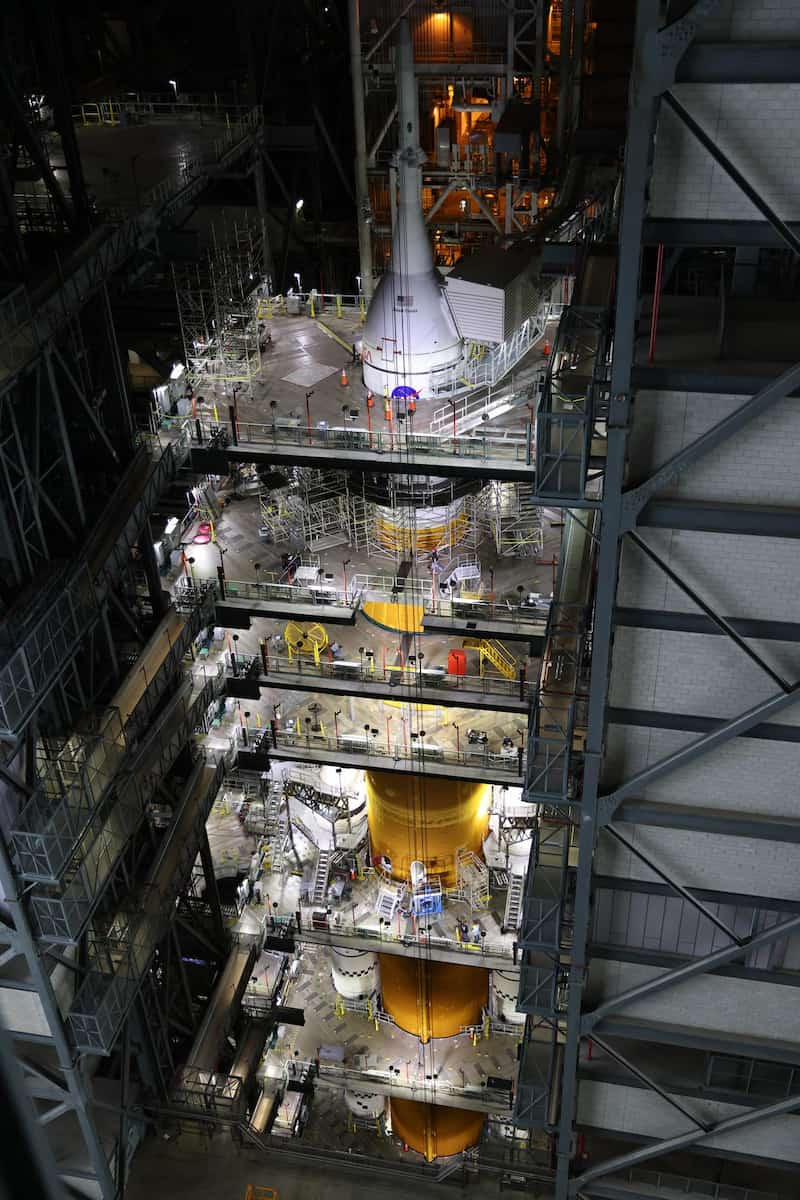
El cohete en el Edificio de ensamblado de vehículos rodeado por las plataformas de acceso – NASA Tras terminar de inspeccionar el cohete SLS y la cápsula Orión de la misión Artemisa I a la Luna la NASA ha comprobado que hay...
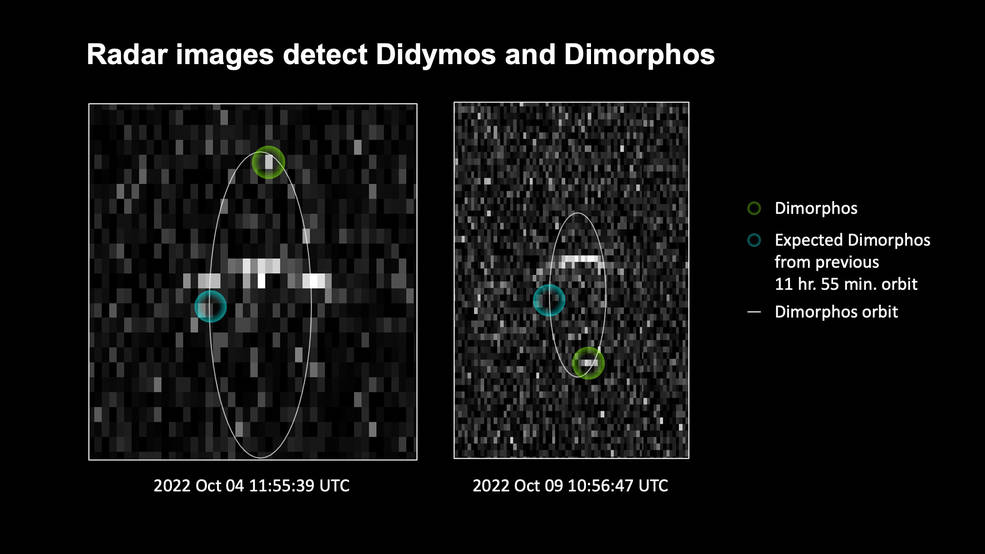
Dimorfo visto por el Telescopio espacial Hubble tras el impacto, que en esta imagen se produjo en la posición de las 10 – NASA, ESA, Jian-Yang Li (PSI), Joe Depasquale (STScI) El pasado 26 de septiembre la sonda DART de la NASA...

En las últimas horas SpaceX ha usado los «palillos» de la torre de lanzamiento para montar un Starship completo formado por el Starship S24 y el Super Heavy conocido como Booster 7. Todo apunta a que serán los que protagonicen el...

The #Crew5 astronauts arrived at the space station at 5:01pm ET. The @SpaceX Dragon Endurance docked to the orbiting complex while the spacecraft was flying about 258 miles above the west coast of Africa. More.. https://t.co/CVvCiwmNU8 pic.twitter.com/s6ZuwjryHE— International Space Station (@Space_Station) October...
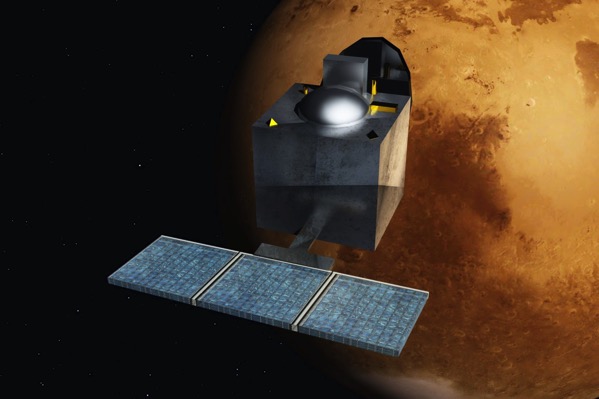
Aunque este verano aún estaba publicando lo que denominaban fotos recientes de la misión resulta que desde abril la Agencia India de Investigación Espacial (ISRO) no tiene contacto con la Mars Orbiter Mission (MOM), también conocida como Mangalyaan. Así que en un...

El SLS y la cápsula Orión de Artemisa I de vuelta al VAB antes de la llegada del huracán Ian – NASA Aunque el huracán Ian ha causado numerosos daños en Florida, la NASA acaba de confirmar que tanto el cohete SLS...

Más de un año después de un primer intento fallido, y tras varias semanas extra de retraso por problemas técnicos, con la meteorología, y por disponibilidad de la plataforma de lanzamiento, Firefly ha lanzado esta mañana su segundo cohete Alpha. Que...

Hace unas horas el módulo laboratorio Wentian de la estación espacial china usaba su brazo robot de maniobra para colocarse en su ubicación definitiva. Así, en lugar de estar acoplado al puerto frontal del módulo Tianhe, dónde quedó ubicado en julio,...

El Hubble en la bodega de carga del Atlantis, listo para las tareas de mantenimiento que iba a acometer la tripulación de la misión STS-125 – NASA En mayo de 2009 el transbordador espacial Atlantis y su tripulación llevaba a cabo la...
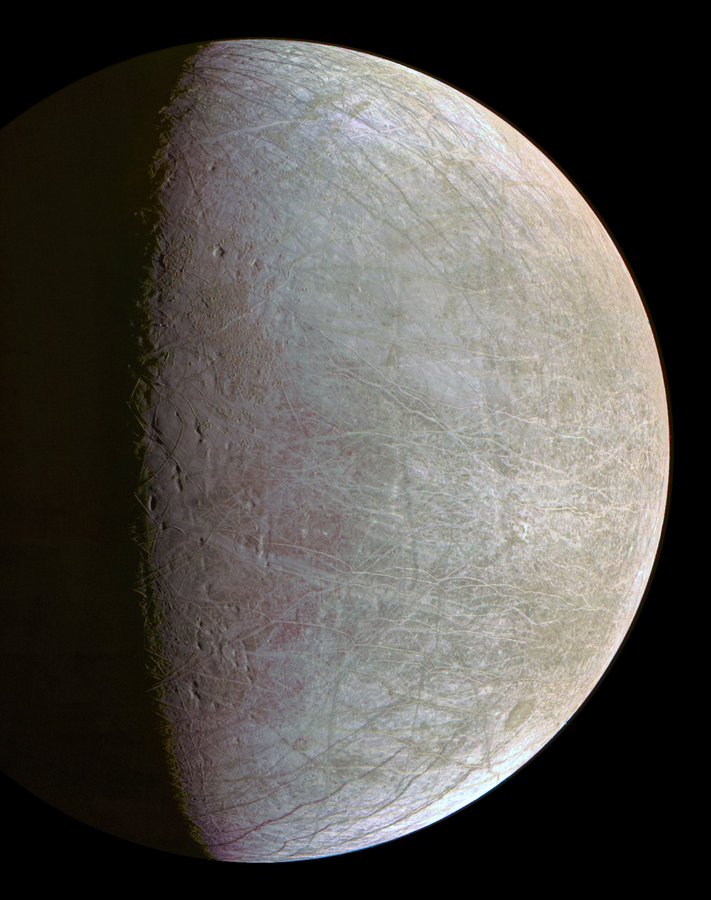
Early this morning, @NASAJuno flew by Europa, returning our first closeup view since the Galileo spacecraft in 2001. Europa, with its ocean under its icy surface, is the target of @EuropaClipper, which will arrive at the beginning of the next decade to...

Hace unos minutos ha terminado la misión de la cápsula tripulada Soyuz MS-21 «Koroliov» con suave aterrizaje –para los estándares de estas cápsulas– en en las llanuras de Kazajistán. A bordo de ella venían los cosmonautas Oleg Artemyev, Denis Matveev y...
El Saturno V y la EEI de Lego (no a escala) – Lego Si nos lees habitualmente sabrás de nuestra pasión por las cosas del espacio y por los Legos. Así que seguro que te molan tanto como a nosotros el Saturno...

En una ceremonia llevada a cabo hace unos minutos, la astronauta europea de nacionalidad italiana (tal y como le gusta decir a la Agencia Espacial Europea, ESA) Samantha Cristoforetti recibía de manos de Oleg Artemyev el mando de la Estación Espacial...
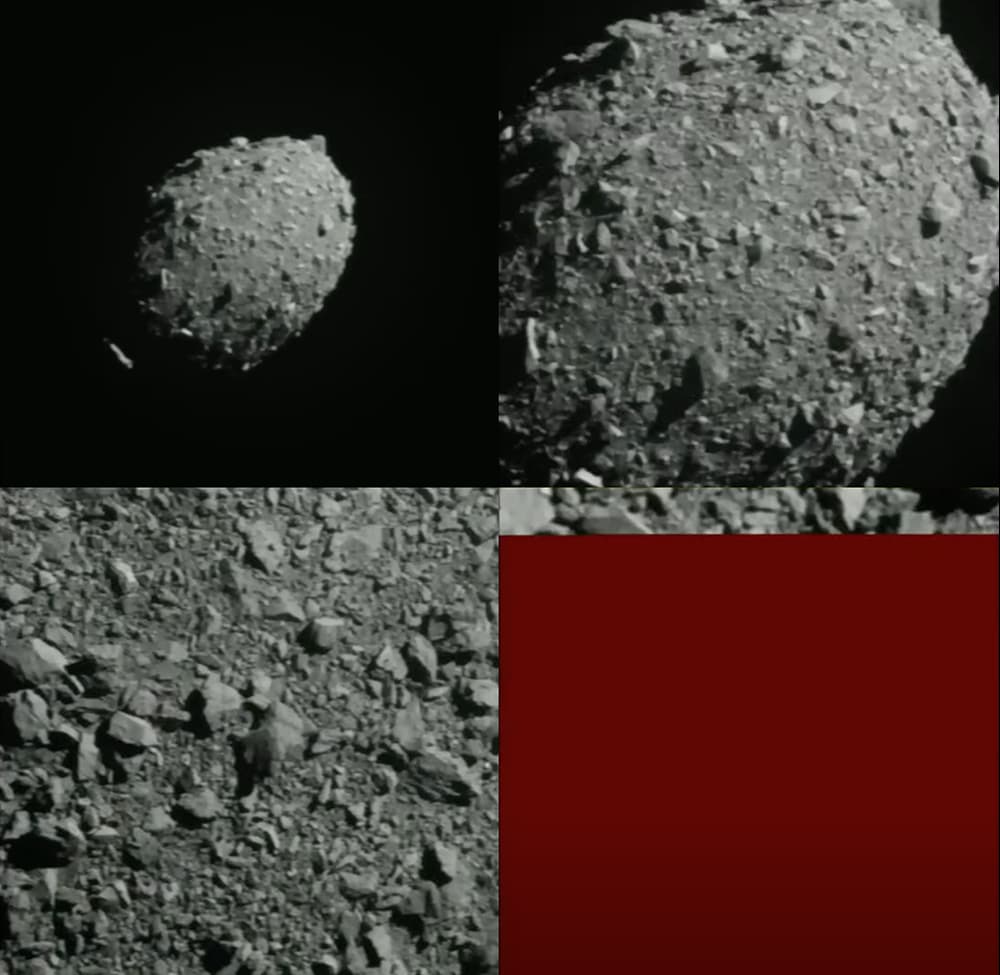
Nos estamos encaminando hacia una nueva era de la humanidad. Una era en la que potencialmente tenemos la capacidad de protegernos de algo como el impacto de un asteroide peligroso. Es algo increíble. Nunca antes habíamos tenido esa capacidad.– Lori Glaze,directora de...

EL SLS y la Orión vistos desde la trinchera de llamas de la Plataforma de lanzamiento 39B – NASA/Kim Shiflett La tormenta tropical Ian ha terminado por convertirse en el huracán Ian. Que la previsiones meteorológicas indican que se dirige hacia Florida....
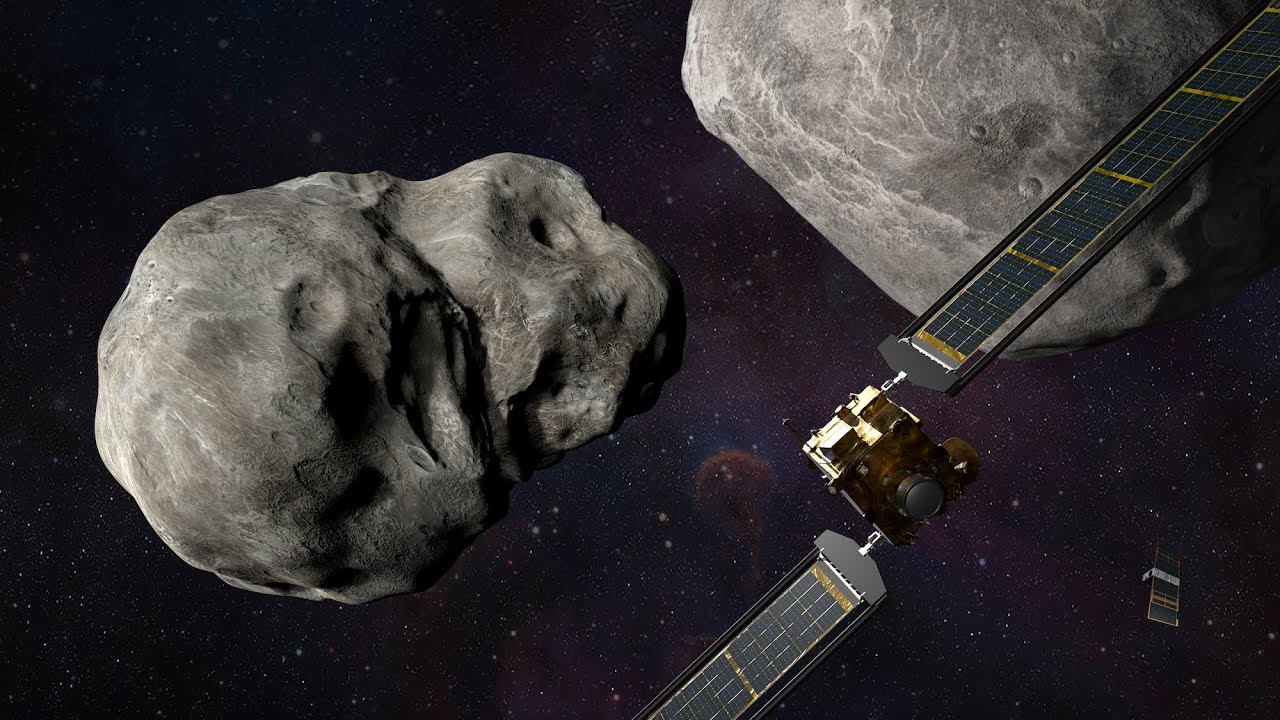
Esta próxima noche a la 1:14, hora peninsular española (UTC +2), del martes 27, la sonda DART de la NASA, de Double Asteroid Redirection Test, Prueba de redireccionamiento de un asteroide binario, se estampará contra el asteroide Dimorphos, de 160 metros...

El SLS en la plataforma de lanzamiento – NASA Con las previsiones de que la tormenta tropical Ian pueda afectar Florida, la NASA ha anunciado que no va a intentar lanzar la misión Artemisa I hacia la Luna el martes 27 de...

What do you think happens to the ping pong ball when I try to sink it in water? Find out! #MissionMinerva #bouyancy #SpaceTok @esa @esaspaceflight @Space_Station pic.twitter.com/dtxW8AOtlS— Samantha Cristoforetti (@AstroSamantha) September 24, 2022 Este vídeo grabado por Samantha Cristoforetti en la Estación...

El SLS en la plataforma de lanzamiento el pasado 17 de agosto, recién llegado del Edificio de ensamblado de vehículos – NASA/Joel Kowsky La NASA hizo ayer por la tarde una rueda de prensa para informar de los resultados de la prueba...

En julio de 2021 el AFOL Tonysmuncle, que además es astrónomo, propuso un Telescopio espacial James Webb de Lego a la escala de los minifig. Su propuesta alcanzó los 10.000 votos necesarios para que la empresa lo considerara como uno de...

El SLS con los depósitos llenos – NASA TV Tal y como estaba previsto, la NASA hizo ayer un ensayo de carga de propelentes en el cohete SLS que tiene que lanzar la misión Artemisa I hacia la Luna. Y por fin...
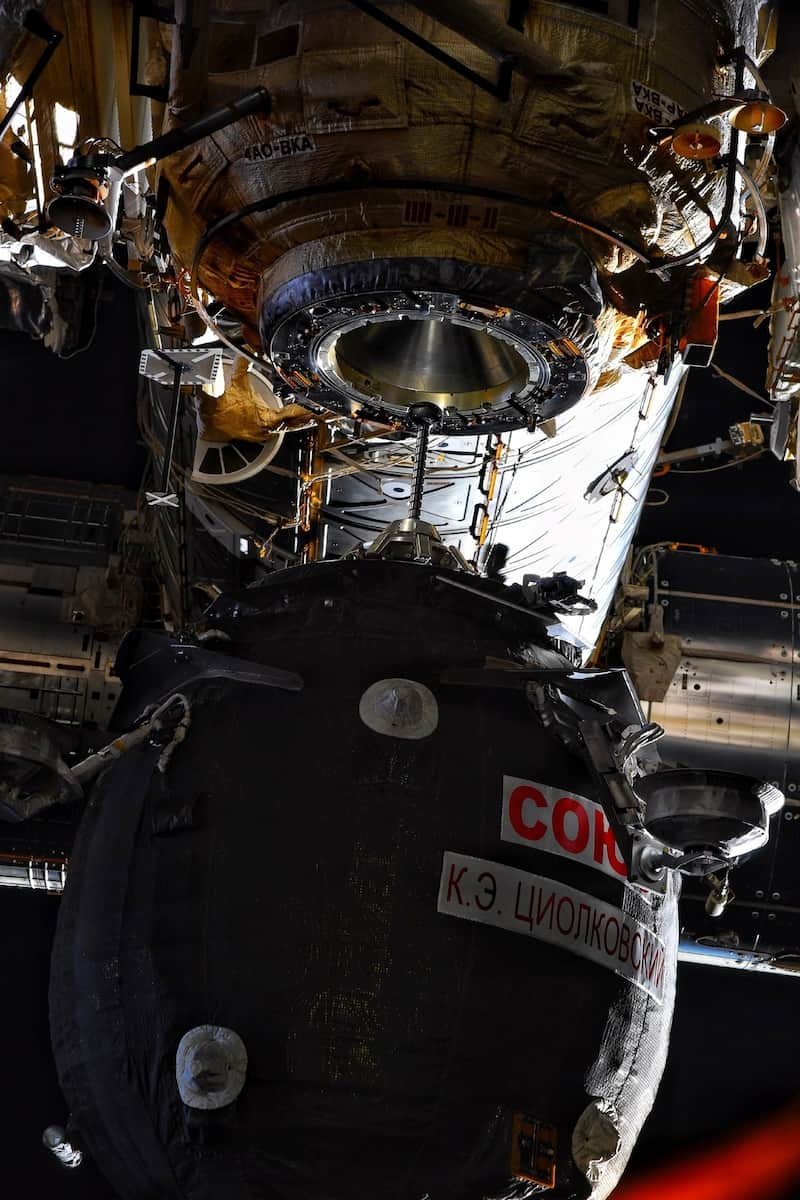
La Soyuz MS-22 a punto de atracar en la EEI – Sergei Korsakov/Roscosmos En estos momentos están a punto de ser abiertas las escotillas entre la cápsula tripulada Soyuz MS-22 y la Estación Espacial Internacional (EEI). A bordo de la Soyuz viajan...

Esta semana se está celebrando en París el Congreso Internacional de Astronáutica. Y dentro de él Ariane Group ha presentado SUSIE, su propuesta de nave espacial de carga o tripulada reutilizable. Sé que las comparaciones son odiosas, pero es una especie...
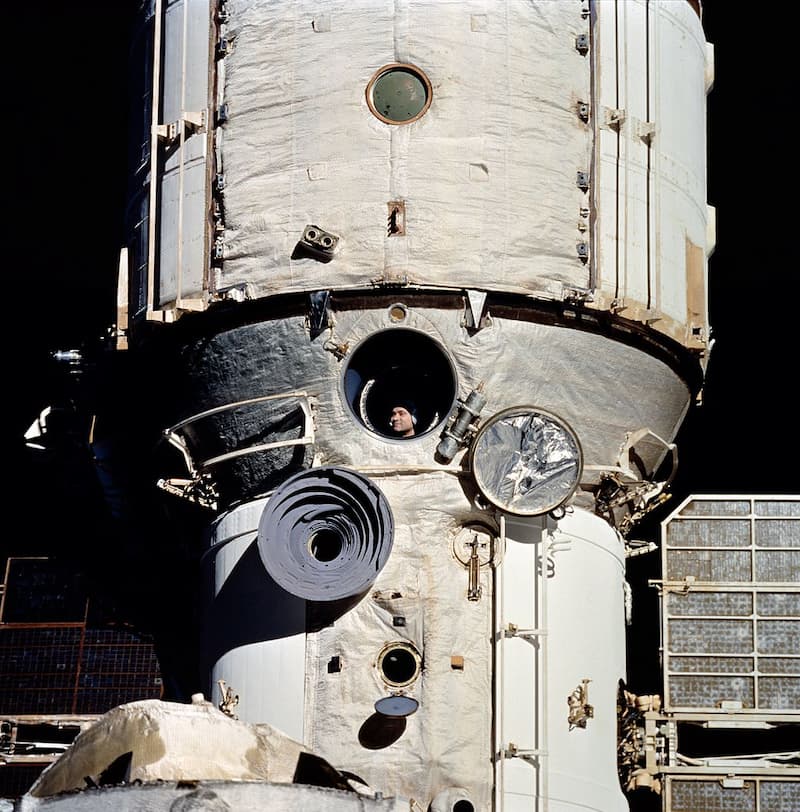
Poliakov en la Mir fotografiado desde el transbordador espacial Discovery – NASA Acaba de morir en Moscú a los 80 años de edad Valeri Poliakov. Hay personas que acumulan más tiempo total que él en el espacio, pero suyo es aún el...

[BREAKING] Shenzhou-14 crew have started their 2nd spacewalk, astronaut CAI Xuzhe exited first. https://t.co/TdMCEGsxG2 pic.twitter.com/PgkFHT5i2J— China 'N Asia Spaceflight (@CNSpaceflight) September 17, 2022 Este pasado viernes Cai Xuzhe y Chen Dong llevaron a cabo el segundo paseo espacial de su misión en...

La empresa española PLD Space acaba de conseguir llevar a cabo un encendido completo de su cohete Miura 1. Ya habían hecho una prueba de encendido completa del motor, el Teprel-1. Pero en un banco de pruebas. Es la primera vez...

El SLS en la plataforma de lanzamiento – NASA El SLS es el inicio de un esfuerzo generacional para devolvernos al espacio profundo y mantenernos allí. Tiene una capacidad tremenda. – John Honeycutt,director del programa SLS de la NASA vs. El cohete Artemis...
El SLS en la plataforma de lanzamiento el pasado 17 de agosto, recién llegado del Edificio de ensamblado de vehículos – NASA/Joel Kowsky Según se puede leer en La NASA actualiza las fechas para el lanzamiento y para la prueba de demostración...

Impresión artística de CAPSTONE sobrevolando la Luna – NASA Por segunda vez desde su lanzamiento el pasado 28 de junio, la misión CAPSTONE de la NASA vuelve a estar en modo seguro. En este caso el modo seguro se activó al final...

Con varios días de retraso porque la meteorología no colaboraba, Blue Origin lanzó finalmente ayer su misión NS-23. Era una misión no tripulada en la que a bordo del a cápsula RSS H. G. Wells sólo iban una serie de instrumentos...

Esta pasada noche SpaceX ha establecido dos nuevos récords para su cohete Falcon 9. Por un lado, ha lanzado y recuperado la misma primera etapa catorce veces; por otro, la segunda etapa encendió su motor hasta cinco veces distintas para poner...
Personal de la NASA trabajando en la reparación del SLS – NASA Tras analizar las distintas opciones que tiene, la NASA ha decidido que intentará reparar en la plataforma de lanzamiento el cohete SLS de la misión Artemisa I. Bueno, técnicamente al...
Nos prometieron Marte, pero nos dieron Facebook… – Dr. Gernot Grömer,del Foro Espacial Austríaco(vía Remco Timmermans)...

Emergency SOS via Satellite en acción – Apple Tal y como estaba anunciado, Apple ha presentado hoy la familia del iPhone 14. Que por supuesto son los más mejores teléfonos que haya hecho jamás. Más rápidos, resistentes a todo, con mayor duración...
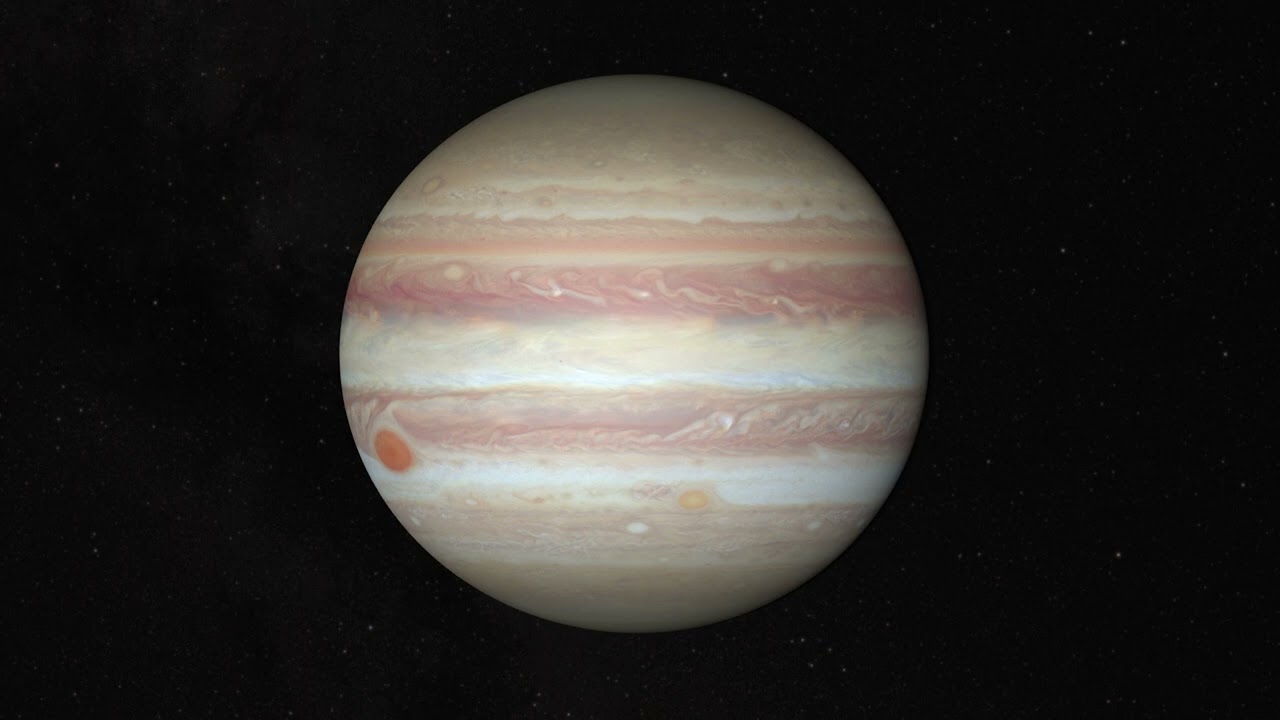
Este apropiado e hipnotizante vídeo musical de Júpiter en rotación a «velocidad real» es un montaje de Interplanetary con imágenes de la NASA/ESA y el Hubble. Dura exactamente 9 horas, 55 minutos y 30 segundos que es lo que tarda Júpiter...

Mientras unos prometen cosas y se da por hecho que mañana Apple presentará una función similar en el iPhone 14, Huawei les ha adelantado por la derecha y acaba de anunciar que los teléfonos Mate 50 y Mate 50 Pro ofrecerán...

El brazo robot europeo entre los paneles solares del módulo Nauka – Roscosmos/Sergey Korsakov Este pasado viernes Oleg Artemyev y Denis Matveev volvieron a salir al exterior de la Estación Espacial Internacional. Su objetivo era poder completar las tareas que quedaron pendientes...
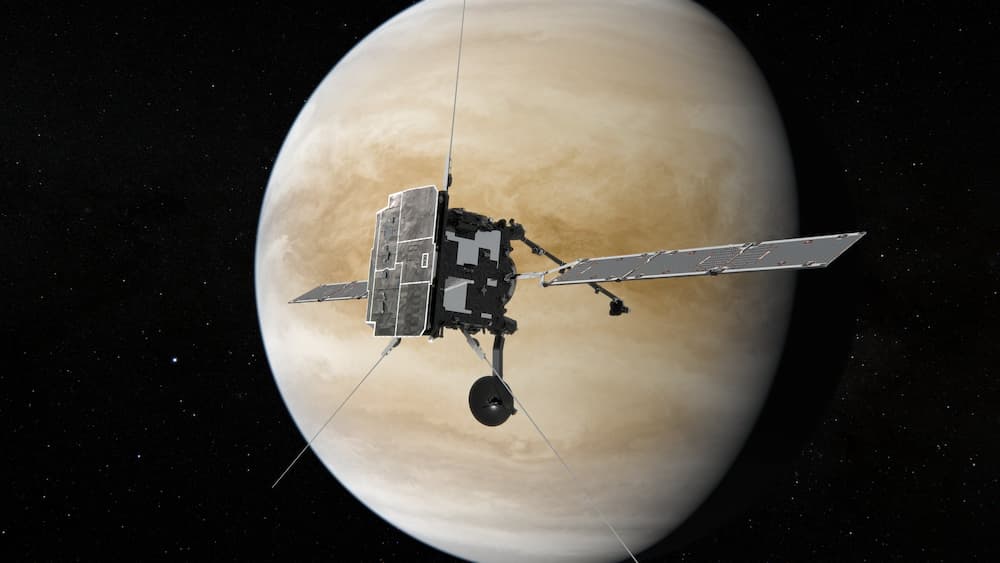
Impresión artística de la Solar Orbiter sobrevolando Venus – ESA A las 3:36, hora peninsular española (UTC +2), de ayer, domingo 4 de septiembre de 2022, la Solar Orbiter de la Agencia Espacial Europea (ESA) completaba sin problemas su tercer sobrevuelo de...

Mensaje de ánimo – NASA/Bill Ingalls Según se van sabiendo más cosas acerca del intento cancelado de lanzamiento de la misión Artemisa I hacia la Luna del sábado 3 cada vez parece más claro que a la NASA se le complica volver...
El SLS en la plataforma de lanzamiento – NASA La NASA ha tenido que cancelar el segundo intento de lanzamiento de la misión Artemisa I hacia la Luna. De nuevo a causa de una fuga de hidrógeno líquido (LH2), aunque situada en...

Oh, un vídeo de un motor cohete funcionando. Vaya… Pero resulta que es el motor Rutherford de la primera etapa del cohete Electrón con el que Rocket Lab lanzó la misión There And Back Again en mayo. La primera etapa fue...
El núcleo de M74 – ESA/Webb, NASA & CSA, J. Lee y el equipo PHANGS-JWST. Gracias a J. Schmidt Después de años y años de retraso de su lanzamiento y seis meses de infarto después de él mientras se configuraba para funcionar...

El SLS a la espera de su segundo intento de lanzamiento – NASA/Keegan Barber Después de haber tenido que cancelar el intento de lanzamiento de la misión Artemisa I hacia la Luna el pasado 29 de agosto la NASA ha anunciado que...

Ingenuity fotografiado por la Mastcam-Z de Perseverance sobre Marte el 15 de junio de 2021 – NASA/JPL-Caltech/ASU/MSSS A mediados de julio la NASA anunciaba que suspendía temporalmente la campaña de vuelos del helicóptero Ingenuity en Marte. El motivo estaba en el empeoramiento...

El SLS en su plataforma de lanzamiento listo –o, visto lo visto, no– para despegar en su primera misión - NASA/Joel Kowsky El sábado 27 a las 15:53, hora peninsular española (UTC +2), arrancaba la cuenta atrás de 46 horas y 40...

Anoche, en una presentación en las instalaciones de SpaceX en Texas, Starbase, Elon Musk y Mike Sievert, director ejecutivo y presidente de T-Mobile en los Estados Unidos, anunciaban un acuerdo de ambas empresas para dar cobertura vía satélite a cualquier teléfono...

A la caza de Artemisa / Andrew McCarthy y Connor Matherne / Póster Esta preciosa foto de la Luna, que puede apreciarse mejor en la versión en alta resolución a 174 Mpx [zoom, 13.216 × 13.216 píxeles] fue tomada el pasado mes...
Impresión artística de un SLS despegando – NASA La misión Artemisa I hacia la Luna por parte del cohete SLS ha pasado su Flight Readiness Review (FRR, revisión de preparación para el vuelo), así que la NASA ha confirmado el 29 de...

Video of the undocking of the @SpaceX #CargoDragon of the #SpX25 mission from the International @Space_Station.@astro_kjell @Astro_FarmerBob @AstroSamantha @astro_watkins pic.twitter.com/H6ls7w9EzZ— Serg.Korsakov (@SergKorsakov) August 20, 2022 Un amerizaje frente a la costa de Florida el 20 de agosto de 2022 ponía fin a...
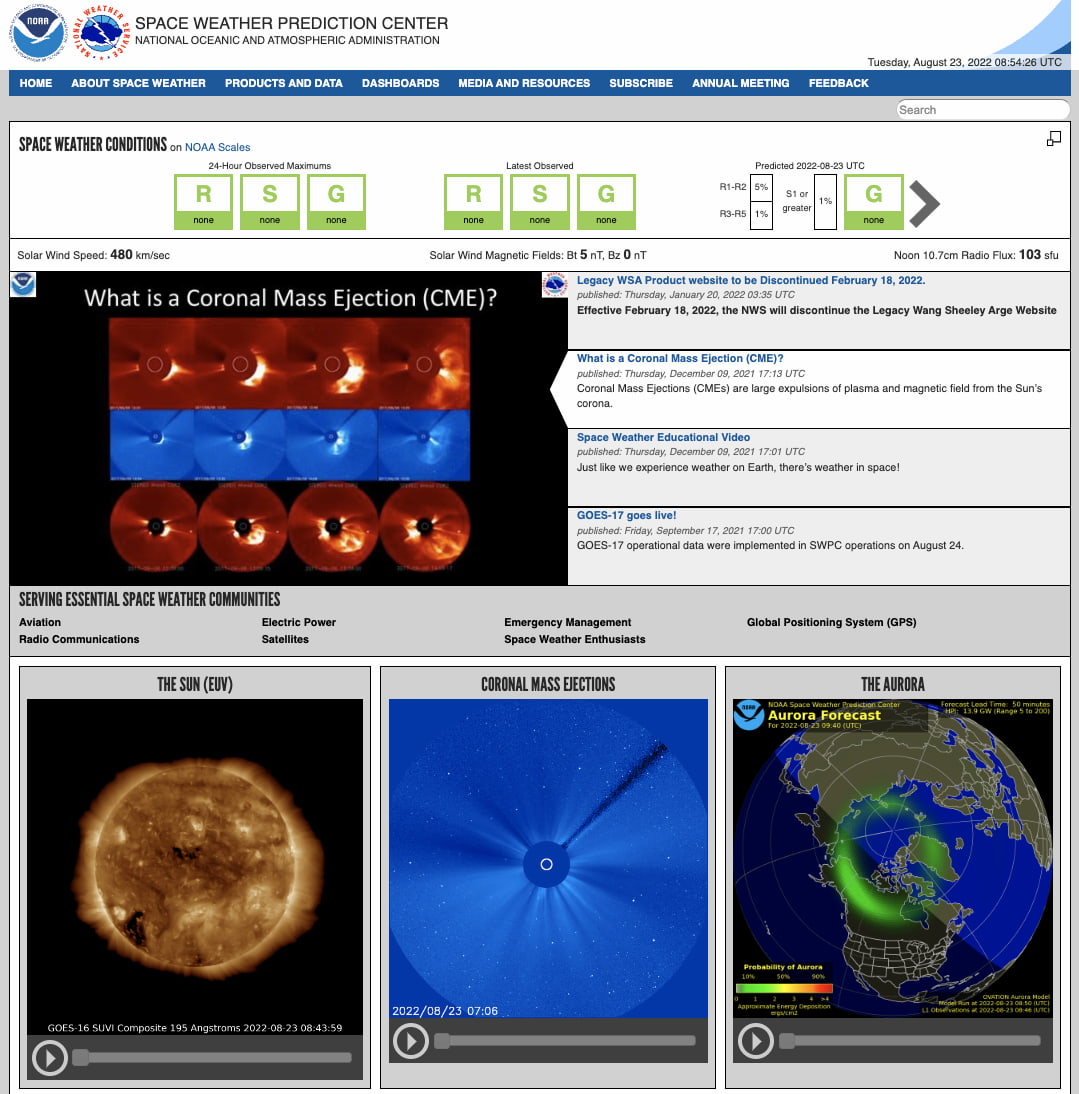
La página del Space Weather Prediction Center (Centro de Predicción Meteorológica* Espacial) de la NOAA presenta un montón de datos e información útil acerca de los fenómenos especiales haciendo una especie de paralelismo con los fenómenos meteorológicos: tormentas solares, auroras, eyecciones...

Noviembre Alfa Uno Sierra Sierra [NA1SS], Mike Cero Lima Mike Kilo [M0LMK].– Isabella, desde Kent (Inglaterra) [Indicativo] Mike Cero Lima Mike Kilo, repita para NA1SS (…) ¡Bienvenida a la Estación Espacial Internacional!– Kjell Lindgren, astronauta orbitando en la ISS (…) NA1SS,...

Oleg Artemyev es el que lleva el traje Orlan con rayas rojas – NASA TV Estaba previsto que esta tarde Oleg Artemyev y Denis Matveev llevaran a cabo un paseo espacial de seis horas y media para continuar con el proceso de...

Con el lanzamiento de un lote de 52 satélites Starlink el pasado 10 de agosto, SpaceX superaba la barrera de los 3.000 satélites de la constelación de acceso a Internet puestos en órbita. Y desde entonces ya ha lanzado otros 46...

Póster que celebra los diez años de Curiosity en Marte – NASA/JPL-Caltech Recuerdo perfectamente seguir en directo la retransmisión de la llegada de Curiosity a Marte. Por supuesto no partían de cero sino que la maniobra se basaba en la de otros...

Blue Origin hizo ayer el sexto lanzamiento tripulado de la cápsula RSS First Steps. A bordo de ella iban seis personas que durante unos minutos experimentaron lo que supone estar en caída libre. Y que, también durante unos minutos, estuvieron por...

Impresión artística de un Sentinel-1 en órbita – Unión Europea / Programa Copérnico El pasado mes de diciembre de 2021 el radar del satélite medioambiental Sentinel-1B dejaba de funcionar. Todos los esfuerzos por volver a activarlo desde entonces han resultado infructuosos. Así...
Escaping Gravity: My Quest to Transform NASA and Launch a New Space Age. Por Lori Garver. Diversion Books (21 de junio de 2022). 412 páginas. Inglés. Lori Garver fue subdirectora de la NASA de 2009 a 2013. Mientras ocupó ese puesto fue...
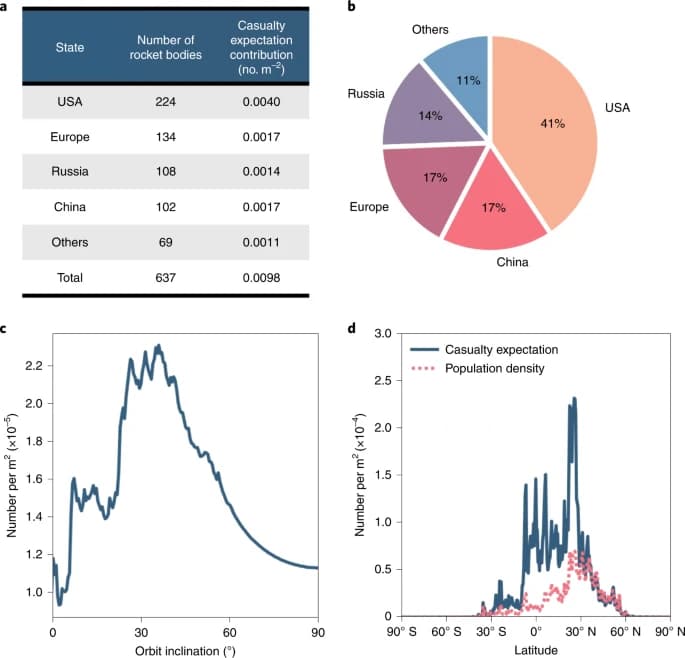
Antes que nada: los restos del cohete chino Larga Marcha 5B que esperábamos expectantes porque efectuaba su reentrada descontrolada entre hoy y mañana sin control, parece han sido vistos finalmente hace un rato, hacia las 18:45 GMT+2, cayendo sobre el Océano...
Impresión artística de los distintos elementos de la misión ya en Marte - NASA La NASA y la Agencia Espacial Europea (ESA) acaban de presentar una arquitectura simplificada para la misión de retorno de muestras de Marte. En ella han eliminando el...

Un Falcon 9 en el edificio de procesado de vehículos de SpaceX con una Crew Dragon acoplada – SpaceX Suena un poco a El Mundo Today. Pero según cuenta la NASA en NASA, SpaceX Provide Crew-5 Hardware Operations Status el lanzamiento de...
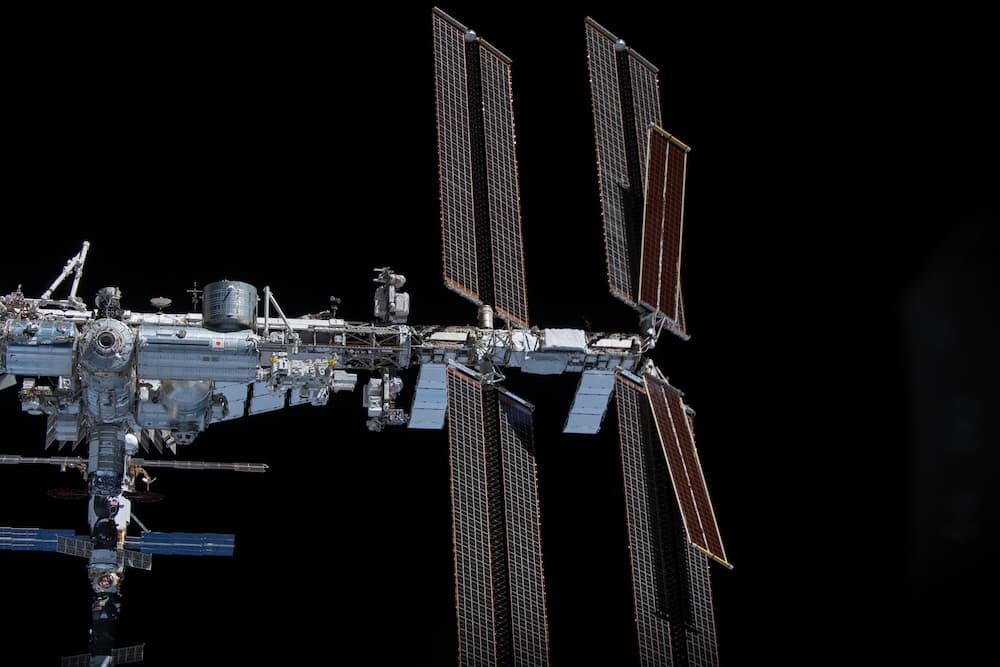
La EEI vista de frente – NASA Está haciendo las rondas un artículo de TASS que informa de que Yuri Borísov, el flamante nuevo director de Roscosmos, le ha dicho a Vladimir Putin que Rusia dejará la Estación Espacial Internacional después de...

The video shows the whole process of China's Wentian Lab Module launched with the Long March-5B Y3 carrier rocket from the Wenchang Space Center and will dock to the Tianhe core module of China Space Station at 03:30 am tomorrow. pic.twitter.com/EkzoI9SgOE— Angelina...
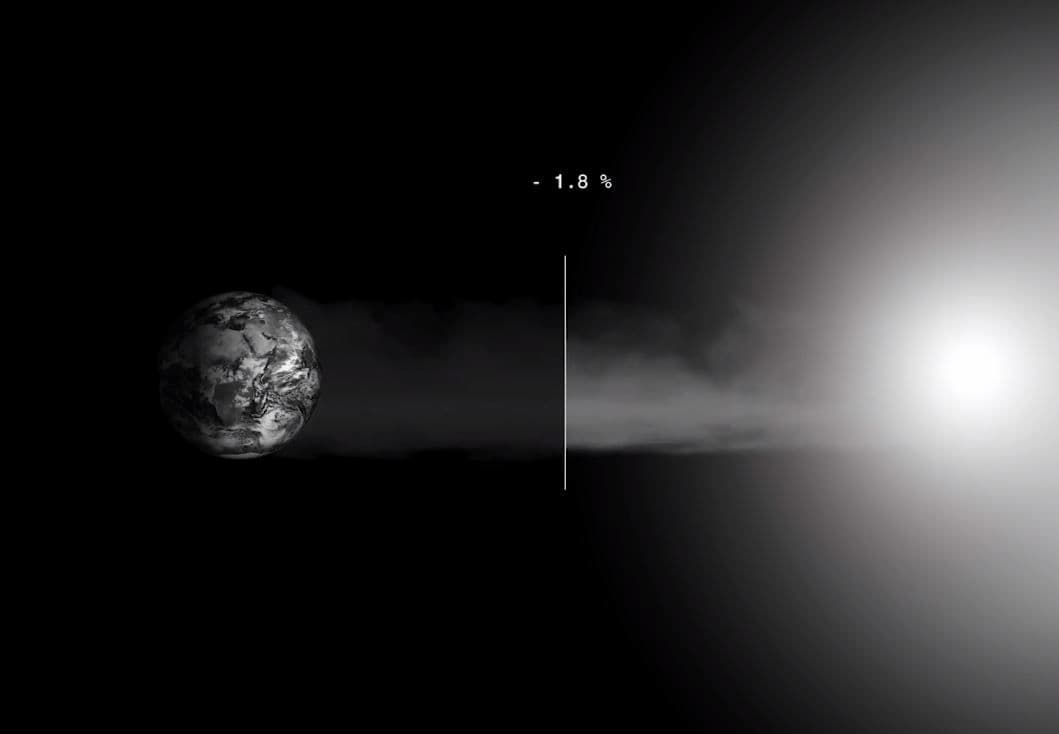
En el M.I.T. se han marcado este proyecto de geoingeniería solar como opción para aplacar los efectos del cambio climático, también conocidos aquí como la caló, llamado Burbujas Espaciales (Space Bubbles). Básicamente consiste en proteger la Tierra del implacable efecto de...

Hace unos minutos un cohete Falcon 9 de SpaceX ponía en órbita un nuevo lote de 46 satélites Starlink. Esto ya casi no sería noticia de no ser porque es el lanzamiento número 32 del año para la empresa, cifra con...

Aunque Dmitri Rogozin había amenazado con cancelarlo, ayer la astronauta italiana de la Agencia Espacial Europea (ESA) Samanta Cristoforetti y el cosmonauta Oleg Artemyev de Roscosmos llevaron a cabo un paseo espacial, tal y como estaba previsto. Con la denominación oficial...
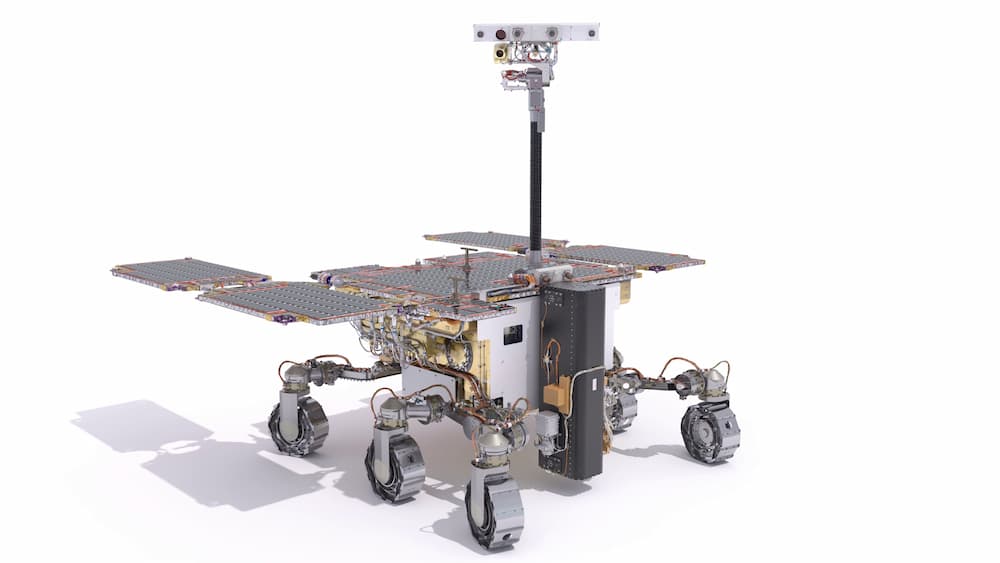
Impresión artística del rover Rosalind Franklin - ESA Estaba previsto que ayer la Agencia Espacial Europea anunciara sus planes para seguir adelante con el lanzamiento del rover Rosalind Franklin tras la ruptura definitiva de su colaboración con Rusia en la misión debido...

El SLS en la plataforma de lanzamiento durante las pruebas de carga de combustible – NASA Se ve que cómo hoy es el Día de la Luna –se cumplen 53 años desde que las primeras personas la pisaran– a la NASA le...
Prototipo del brazo durante sus pruebas – Leonardo/Maxon/GMV/ OHB Italia/ SAB Aerospace s.r.o Después de una fase de estudio y prototipado la Agencia Espacial Europea (ESA) acaba de anunciar que la empresa italiana Leonardo diseñará el brazo del rover europeo que recogerá...

At 11:21am ET, @SpaceX's Dragon docked to the @Space_Station. The cargo spacecraft is delivering supplies and @ISS_Research including EMIT, a new instrument designed to study the role that dust plays in Earth's weather and climate systems. pic.twitter.com/NdmFQNM1v0— NASA (@NASA) July 16, 2022...

Anna Kikina y Andrei Fedyaev firmando documentación tras haber terminado su formación en Rusia – Roscosmos No hay ninguna mención al respecto en la web de la NASA pero la agencia espacial estadounidense y su equivalente rusa, Roscosmos, por fin han firmado...

Tras un par de días de rumores, ya es oficial: Yuri Borísov sustituye a Dmitri Rogozin al frente de Roscosmos, la agencia espacial rusa. El cambio forma parte de una reorganización del gobierno del país por parte de Vladimir Putin. La nota...

Impresión artística de Rosalind Franklin y su plataforma aterrizadora Kazachock recién llegados a Marte – ESA/Roscosmos El director de la Agencia Espacial Europea (ESA por sus siglas en inglés) confirmaba hace unas horas que ha recibido orden del Consejo de la agencia...

Ingenuity sobre Marte. Se ven las rodadas de Perseverance tras apartarse de él – NASA/JPL-Caltech La NASA acaba de anunciar que Ingenuity no volverá a volar hasta principios de agosto. El motivo es que en la mitad de Marte en la que...

La Agencia Espacial Europea (ESA por sus siglas en inglés) por fin ha podido estrenar el cohete Vega-C, que levó a cabo su primer lanzamiento a primera hora de la tarde del 13 de julio de 2022. En desarrollo desde 2014...

Primer campo profundo del Webb – NASA, ESA, CSA y STScI Esta pasada noche el presidente Biden presentaba, con más de una hora de retraso sobre la hora prevista como cualquier estrella del rock, la primera imagen del telescopio espacial James Webb....
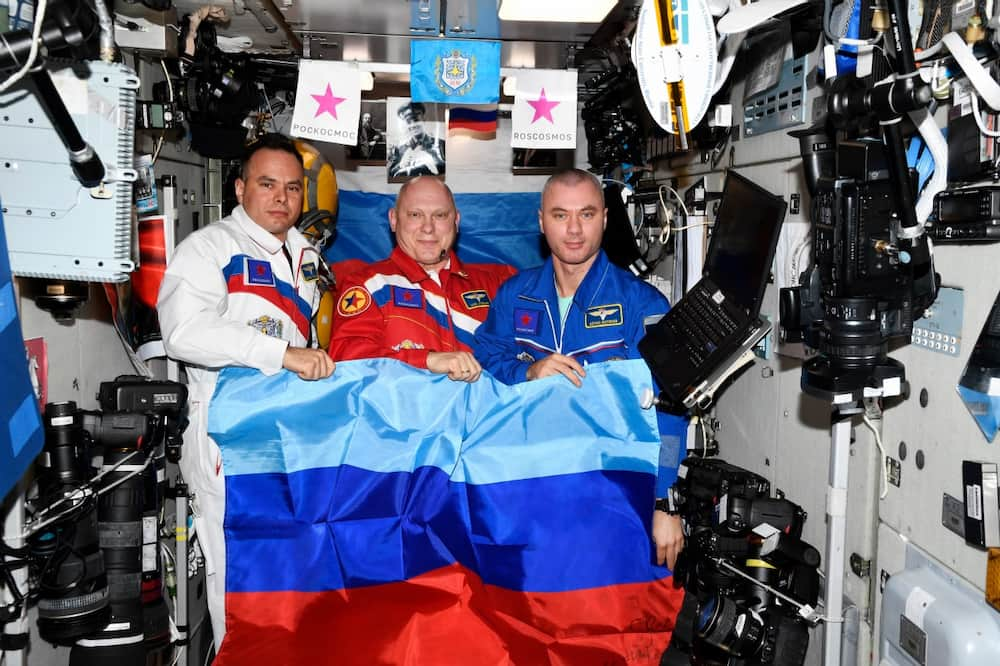
Sergei Korsakov, Oleg Artemyev, y Denis Matveev con la bandera de la República Popular de Lugansk - Roscosmos Al final no han sido las numerosas bravuconadas Dmitri Rogozin, el director de Roscosmos, sino unas fotos subidas al canal de Telegram de la...

Impresión artística de uno de los nuevos aviones nodriza en vuelo – Virgin Galactic Virgin Galactic acaba de anunciar que ha encargado la construcción de dos nuevos aviones nodriza para sus aviones cohete a Aurora, una subsidiaria de Boeing. Son los aviones...
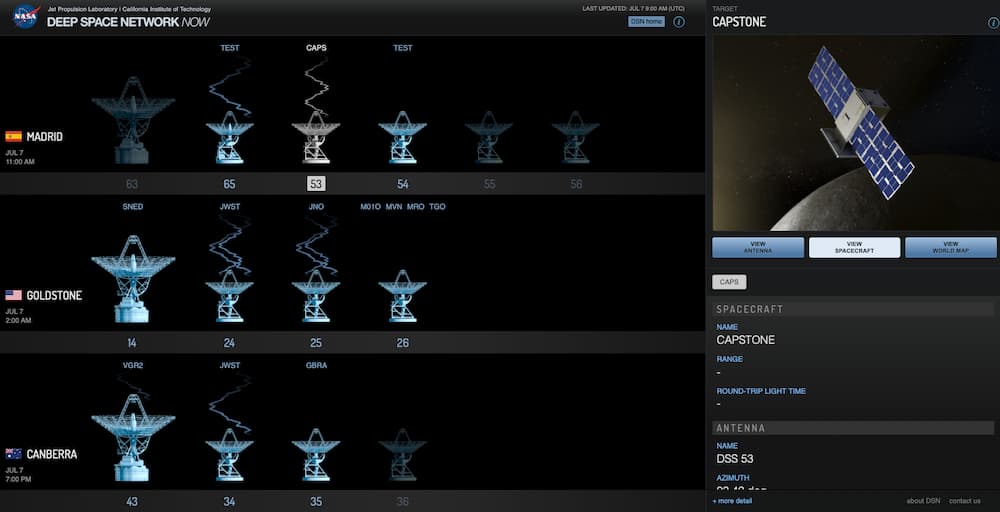
CAPSTONE en comunicación con el control de la misión a través de la estación de Madrid de la Red del Espacio Profundo – NASA Tras un par de días la NASA ha conseguido retomar el contacto con el orbitador lunar CAPSTONE y...
Impresión artística de CAPSTONE camino a la Luna – NASA La NASA ha confirmado que ha perdido la comunicación con CAPSTONE pocas horas después de que la tercera etapa del cohete Electrón que la lanzó la pusiera en camino hacia la Luna...

A los sistemas de guiado de los cohetes les da igual que sea de noche o de día. Por eso es rutinario ver lanzamientos nocturnos cuando son necesarios para poner la carga útil en la órbita deseada. Pero este pasado fin...

Redefiniendo lo de «sacar la basura» – NASA Como cualquier otro sitio habitado en la Estación Espacial Internacional (EEI) se generan residuos de todo tipo. Y después de casi 22 años de ocupación permanente sería un problema si no se pudiera sacar...

MISSION UPDATE: Separation success! Our #CAPSTONE spacecraft has released from @RocketLab’s Photon upper stage and started its solo journey to the Moon. The pathfinder is scheduled to arrive at its lunar orbit on Nov. 13. Learn more: https://t.co/hAkb461nmg pic.twitter.com/hDbeQ1XHQu— NASA Ames (@NASAAmes)...
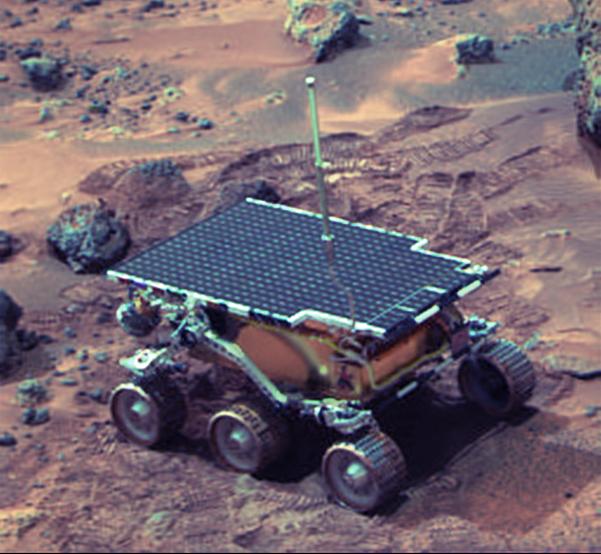
Tal día como hoy de 1997 el rover Sojourner de la NASA tomaba tierra en Marte montado en la plataforma de descenso de la misión Mars Pathfinder. No sería hasta el día siguiente cuando bajó de ella para convertirse en el...

La Cygnus 17 antes de que el brazo robot de la Estación la soltara para su último viaje – Sergei Korsakov/Roscosmos Una reentrada controlada en la atmósfera a media mañana del 29 de junio de 2022 ha puesto fin a la misión...
Impresión artística de un SLS despegando – NASA El 22 de junio la NASA consiguió por fin cargar de propelentes el cohete SLS. La prueba se quedó corta. Pero durante el pasado fin de semana consiguieron activar y comprobar el funcionamiento del...

Un cohete Electrón de Rocket Lab acaba de lanzar la misión CAPSTONE de la NASA hacia la Luna. Es la primera misión de Rocket Lab hacia otro astro. Aunque es el lanzamiento número 27 de un Electrón. Para ello el cohete...

Una soldado del Ejército del Aire monitorizando la situación espacial – Ejército del Aire Después de casi 83 años de historia –fue creado el 7 de octubre de 1939– el Ejército del Aire de España cambia de nombre y ahora pasará a...
Impresión artística de una Cygnus subiendo la órbita de la Estación Espacial Internacional. Como se acoplan a la parte inferior de la Estación, es necesario ponerla apuntando hacia abajo para que el motor de la cápsula apunte en la dirección en la...

Esta mañana, poco antes de las 12 del mediodía, la sonda BepiColombo alzanzaba la distancia mínima a Mercurio en su segundo sobrevuelo del planeta, pasando a tan sólo 200 kilómetros de su superficie. El sobrevuelo forma parte de las maniobras diseñadas...
Cuenta atrás parada en T-29 segundos – NASA El pasado 6 de junio la NASA llevó el cohete SLS por segunda vez a la plataforma de lanzamiento para volver a intentar cargarlo de propelentes antes de su primera misión con destino a...

SHOTS HAVE BEEN FIRED. I REPEAT, SHOTS HAVE BEEN FIRED.In a seminar to Nanjing University, Sun Zezhou, program chief of Chinese Mars mission Tianwen-1, has reported on the Chinese Mars Sample Return mission.TL;DR: Landing on Earth in July 2031, 2 years BEFORE...

No sabía yo que en el departamento de pajamentalismo Conceptos Avanzados de la NASA habían dedicado hace unos años dinero a desarrollar la idea del Radiotelescopio en un cráter de la Luna. Desde luego tiene pinta de ser un proyecto colosal,...
La pasada semana el Gobierno de España aprobaba la creación del Consejo del Espacio. Se trata de un grupo interministerial que se encargará de elaborar los estatutos y el plan inicial de actuación de la futura Agencia Espacial Española, lo que, al...

Hace unos minutos un Falcon 9 de SpaceX ponía en órbita el cuadragésimo noveno lote de satélites Starlink. Pero lo más importante del lanzamiento es que la primera etapa del Falcon 9 que lo llevó a cabo, la B.1060, volaba en...

The #MarsHelicopter successfully completed Flight 29 over the weekend, its first since the start of winter operations at the end of April. On this 66.6-second flight, Ingenuity traveled at 5.5 m/s for 179 m. How the team has adapted to recent challenges:...

Impresión artística del lanzamiento de un Ariane 6 - Ariane Group No hay un comunicado oficial al respecto. Pero si el director general de la Agencia Espacial Europea (ESA) lo dice, tiene pinta de que va a ser cierto: el primer lanzamiento...

Un prototipo de Starship en la plataforma de lanzamiento – SpaceX Con varios meses de retraso –iba a estar listo a finales de enero– la Administración Federal de Aviación de los Estados Unidos (FAA) ha publicado su estudio sobre la solicitud de...

La NASA ha perdido dos satélites de la misión TROPICS para el estudio de huracanes a causa del enésimo fallo de un Rocket 3 de Astra. El lanzamiento tuvo lugar el 12 de junio de 2022. En los primeros minutos todo...
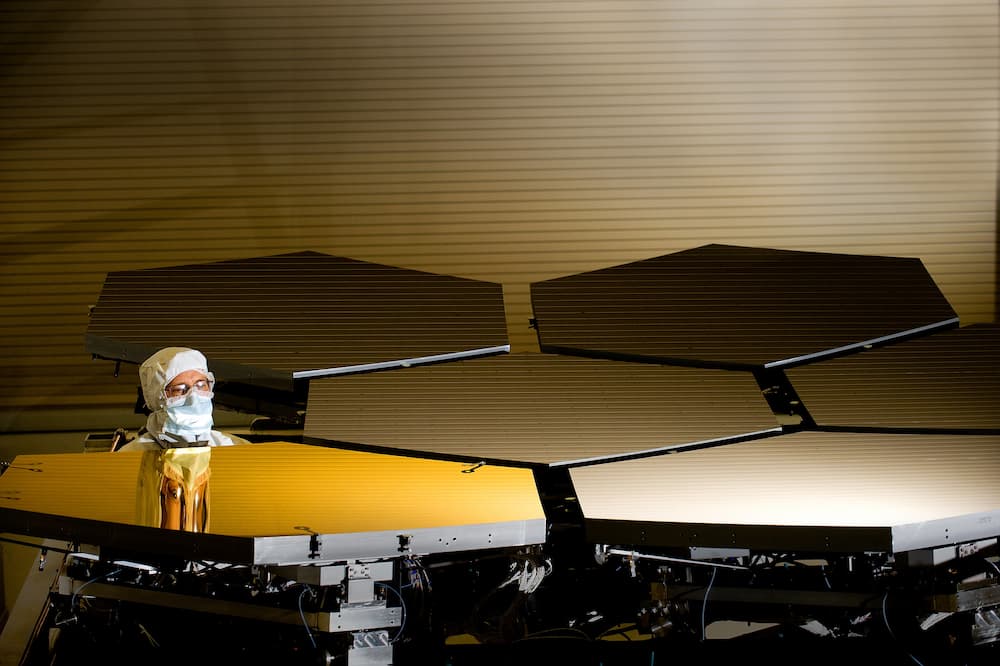
Algunos de los espejos que forman el primario durante una inspección previa al lanzamiento – NASA/MSFC/David Higginbotham Ya es mala suerte, pero incluso antes de que haya entrado en servicio, un micrometeoroide ha dañado uno de los segmentos del espejo principal del...

La Crew Dragon Endurance atracada en la Estación Espacial Internacional vista a través de una de las ventanas de la Crew Dragon Endurance – NASA Según se puede leer en NASA to Purchase Additional Commercial Crew Missions la agencia va a contratar...

This time lapse video shows the mobile launcher and crawler moving @NASA_SLS & @NASA_Orion out of High Bay 3 at the Vehicle Assembly Building tonight. pic.twitter.com/7X8SvWLi2X— NASA's Exploration Ground Systems (@NASAGroundSys) June 6, 2022 Casi mes y medio después de devolverlo al...

China's Shenzhou-14 crewed spaceship successfully docked with the combination of the space station core module Tianhe, the Tianzhou-3 cargo craft and the Tianzhou-4 cargo craft on Sunday https://t.co/zOEDvIFT5o pic.twitter.com/CUIbin38E2— China Xinhua News (@XHNews) June 5, 2022 Siete horas después de su despegue...

El 4 de junio de 2002 Blue Origin lanzaba su quinta misión suborbital tripulada, denominada NS-21. En ella, la cápsula RSS First Steps alcanzó una altitud máxima de 106 kilómetros sobre el nivel del suelo, 107 km sobre el nivel medio...

The Progress 81 cargo craft is on its way to the station after launching at 5:32am ET today. It will arrive in 3.5 hours live on @NASA TV. More... https://t.co/TaYDPOqLlk pic.twitter.com/szFIwgf8Cv— International Space Station (@Space_Station) June 3, 2022 Tres horas y veinte...
Impresión artística de dos astronautas de la NASA sobre la superficie de la Luna. El diseño de sus trajes no se corresponde con el de ninguna de las dos empresas adjudicatarias – NASA Según se puede leer en NASA Partners with Industry...

La Prgress MS-18 a su partida de la EEI con la Tierra al fondo – NASA A eso de las 2 de la tarde, hora peninsular española, del 1 de junio de 2022 terminaba la misión de la cápsula de carga Progress...
An aerial view from Mars.During #MarsHelicopter’s 25th flight, it flew 2,310 ft (704 m) at a speed of 12 mph (5.5 m/s), breaking its own distance and groundspeed records on another planet. Imagery recently downlinked shows Ingenuity’s point of view. https://t.co/NU5d6wGSdE pic.twitter.com/IqgkEmR04W—...

Touchdown, #Starliner! pic.twitter.com/5MJUoAYhqg— Boeing Space (@BoeingSpace) May 25, 2022 Hace unas horas la primera cápsula Starliner CST-100 de Boeing en llegar a la Estación Espacial Internacional (EEI) tomaba tierra después de haber permanecido atracada cinco días en ella. Esto ponía fin a...
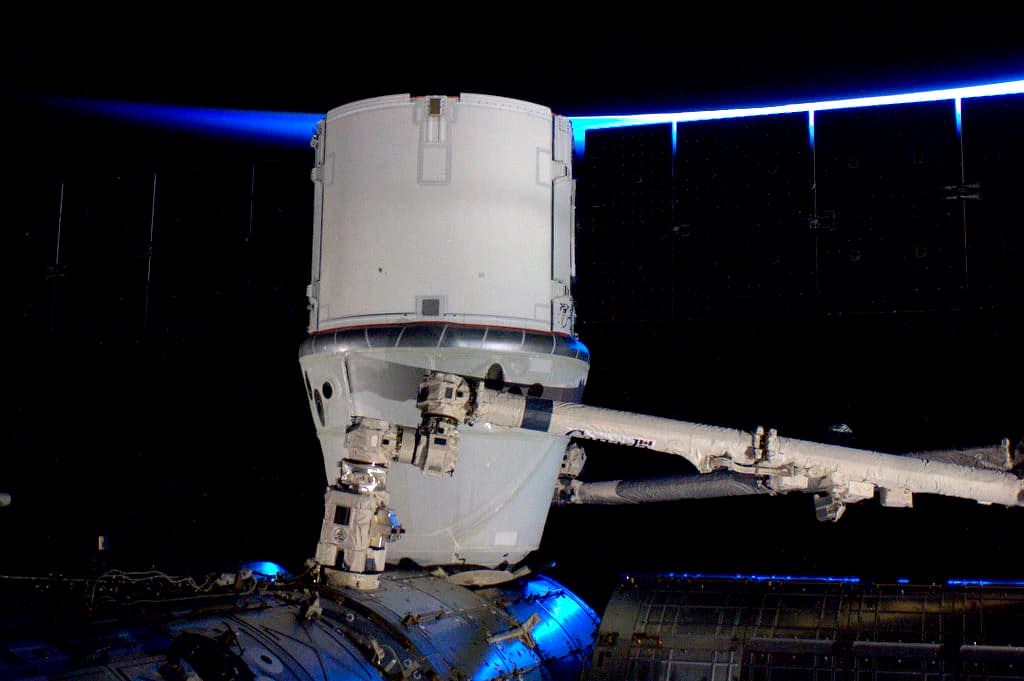
La Dragon C2 en la Estación Espacial Internacional – André Kuipers/ESA Hoy se cumplen diez años de la llegada de la primera Dragon de SpaceX a la Estación Espacial Internacional (EEI). Llevaba a bordo unos 500 kilos de suministros. Para la NASA...
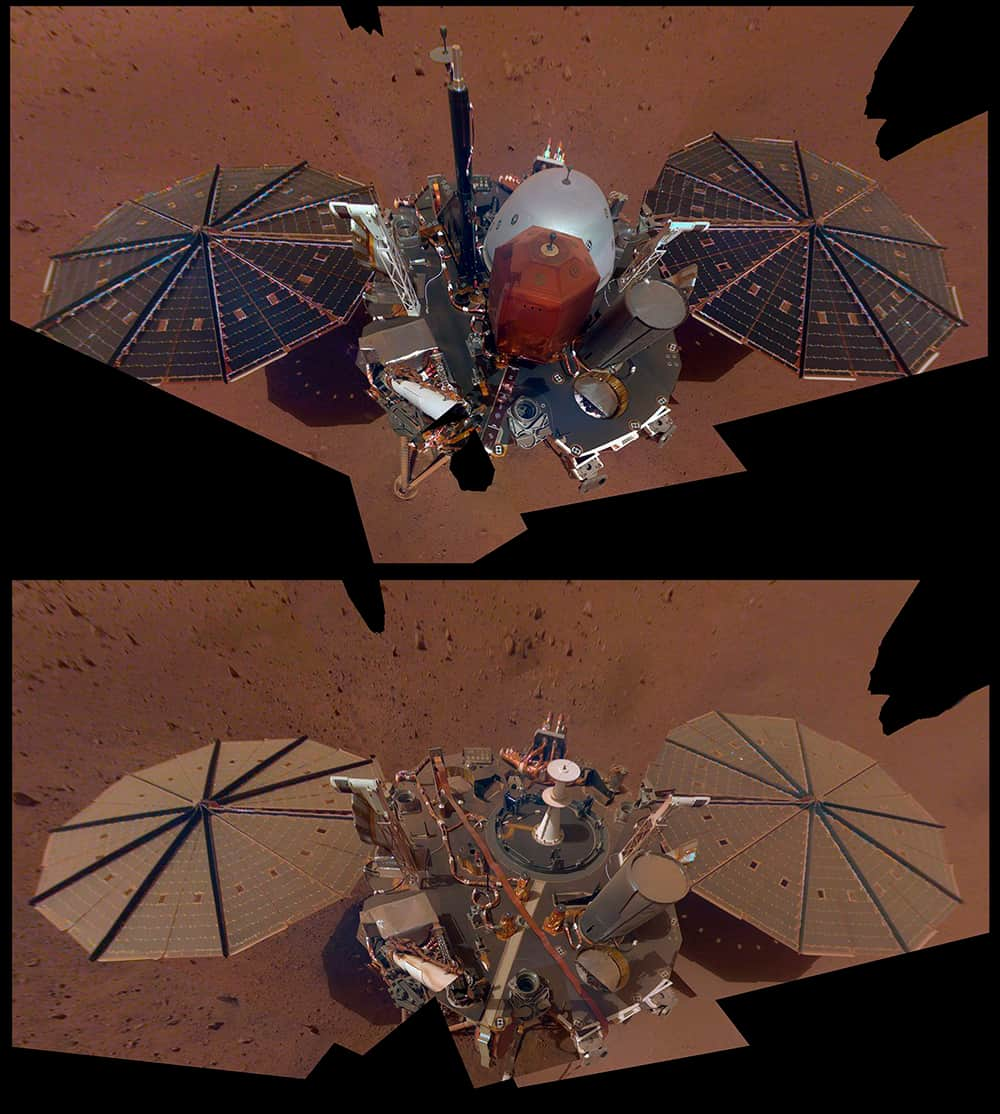
Before losing more solar energy, I took some time to take in my surroundings and snapped my final selfie before I rest my arm and camera permanently in the stowed position. More on my final months ahead: https://t.co/eATDXbOlx2 pic.twitter.com/q7gso8NSjv— NASA InSight (@NASAInSight)...
En el vídeo I found Katherine Johnson's actual calculations at NASA de Tibee se puede ver un pequeño análisis de la publicación de 1960 Determination of azimuth angle at burnout for placing a Satellite Over a Selected Earth Position de la...
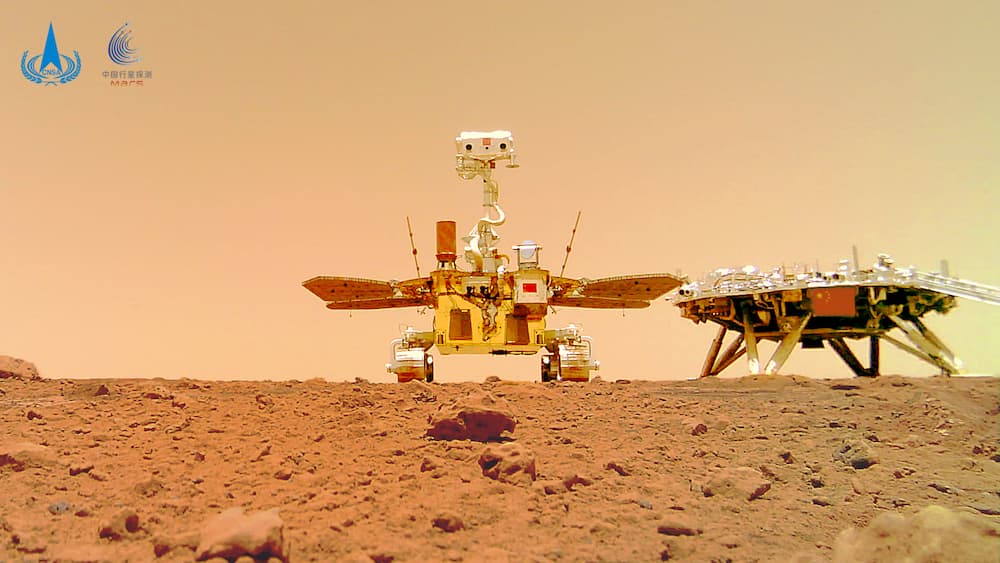
Dos imágenes lado a lado que permiten comprobar la acumulación de polvo sobre Zhurong. La primera es de mayo de 2021; la segunda de enero de 2022 – CNSA/PEC El pasado día 18 la Administración Espacial Nacional de China (CNSA) anunciaba que...
See #Starliner successfully, autonomously rendezvous and dock with @Space_Station during #OFT2. Through the combined work of @NASA and Starliner teams, the spacecraft connected to the Boeing-built International Docking Adapter at 7:28 p.m. CT. pic.twitter.com/GHnz59zHXa— Boeing Space (@BoeingSpace) May 21, 2022 Esta pasada...

Esta pasada noche un cohete Atlas V de United Launch Alliance (ULA) lanzaba la misión Boeing Orbital Flight Test 2 (Vuelo de prueba orbital 2, OFT-2). Pero si bien el cohete cumplió a la perfección con su cometido, parece ser que...

Ready for L-0.#Starliner Orbital Flight Test-2 launches on May 19 at 6:54 p.m. ET. pic.twitter.com/MUeggPBKBu— Boeing Space (@BoeingSpace) May 19, 2022 Todo está listo en el Complejo de Lanzamiento 41 de Cabo Cañaveral para el despegue de una cápsula Starliner rumbo a...

El 25 de julio de 2019 iSpace se convertía en la primera empresa privada china en hacer un lanzamiento orbital con éxito. Desde entonces ha hecho otros tres lanzamientos de su cohete Hyperbola-1 y los tres han fallado. El tercero hace...
Ingenuity sobre la superficie de Marte fotografiado por Perseverance – NASA/JPL-Caltech/ASU El pasado 3 de mayo el helicóptero Ingenuity de la NASA no dio señales de vida durante la sesión de comunicaciones programada para ese día. Pero para el día 5 el...
IRAC vs MIRI (clic para ver en grande) – NASA/JPL-Caltech; NASA/ESA/CSA/STScI Terminado su enfoque, al telescopio espacial James Webb aún le quedan un par de meses de ajustes y pruebas antes de entrar en servicio. Pero las imágenes del instrumento MIRI, aún...
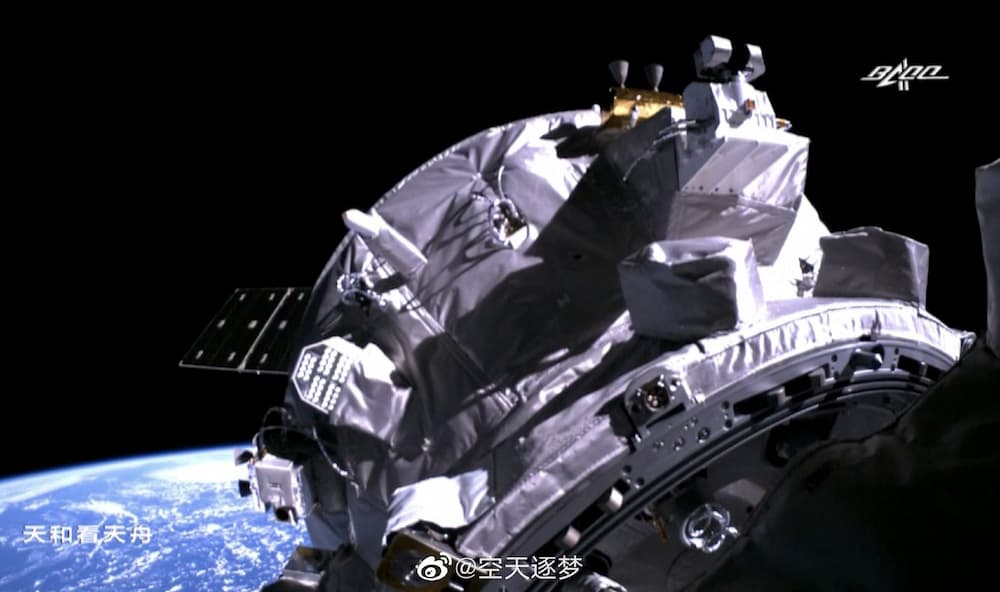
A great video recap of #Tianzhou4 mission, including many details of the test and assembly work before launch.https://t.co/Y2lvmE8FPK pic.twitter.com/pEbAzkvMa1— China Spaceflight (@CNSpaceflight) May 10, 2022 China sigue adelante con la construcción de su estación espacial, en este caso con el lanzamiento y...

El amerizaje de la Crew Dragon Endurance en el Golfo de México tras 177 días en el espacio ponía fin oficialmente a la misión Crew-3 a la Estación Espacial Internacional (EEI). Era la tercera rotación regular de tripulantes a la EEI...

El segundo encendido estático con éxito del cohete Miura 1 de PLD Space lo acerca un paso adelante más a que lo veamos volar. Este encendido ha durado 20 segundos. El siguiente está programado para un encendido de 122 segundos, que...

Now these are views we could get used to. #ThereAndBackAgain pic.twitter.com/yYUtegy52v— Rocket Lab (@RocketLab) May 11, 2022 Rocket Lab lanzó anoche la misión There And Back Again en la que un cohete Electrón puso en órbita con éxito 34 satélites para varios...

En la noche del 29 de abril de 2022 Rusia hizo por fin el primer lanzamiento orbital de un cohete Angará 1.2 después de más de 25 años de desarrollo –el proyecto fue aprobado por Borís Yeltsin el 6 de enero...

Esta pasada noche para quienes vivimos en España –allí eran la 17:27– SpaceX ha puesto en órbita otro lote de 53 satélites de su constelación Starlink de acceso a Internet, lo que ya no es casi novedad. Pero sí es relevante...
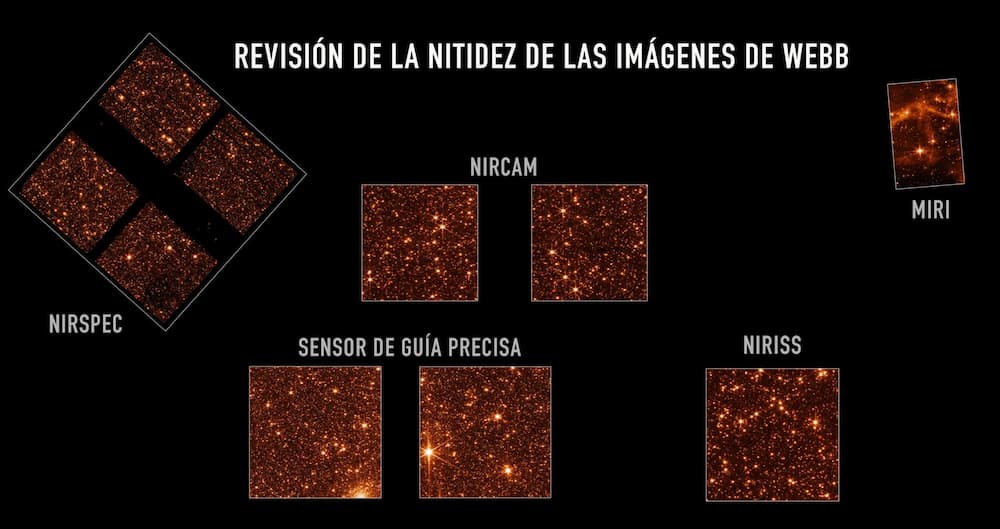
“It’s full of stars!”This mosaic represents a sparkling turning point as we #UnfoldTheUniverse. #NASAWebb’s mirrors are now fully aligned! Next is instrument calibration, the final phase before Webb is ready for science: https://t.co/PcAxajyMfIWhat do we see here? pic.twitter.com/qzdZRbsgRF— NASA Webb Telescope (@NASAWebb)...

Two Russian cosmonauts unlocked the European Robotic Arm from its launch moorings today, allowing the manipulator to move around outside the International Space Station for the first time — as seen in this time lapse video.Full story: https://t.co/9QfkS6PLfD pic.twitter.com/Dp1yvNejEx— Spaceflight Now (@SpaceflightNow)...

While we await ideal weather conditions for #ThereAndBackAgain, the recovery team has been conducting capture tests using a stage 1 mass simulator. Our pilots make this look easy! pic.twitter.com/1r6PZvzBni— Rocket Lab (@RocketLab) April 26, 2022 Aunque al principio el cohete Electrón de...

Just this morning, the four #Crew4 astronauts were launching from @NASAKennedy. Now they're being greeted by the crew of the @Space_Station. Watch as they enter their new digs. pic.twitter.com/nifrIHBo5f— NASA (@NASA) April 28, 2022 Con varios días de retraso causados por el...

El amerizaje de la Crew Dragon Endeavour a las 19:06, hora peninsular española (UTC +2), del 25 de abril de 2022 ponía fin a la misión Axiom Ax-1, la primera misión tripulada privada a la Estación Espacial Internacional (EEI). Eso sí,...

Un Airbus A321 de Hawaiian Airlines en Maui – Wicho Con apenas unos días de diferencia Hawaiian Airlines y JSX se convertían en las dos dos primeras aerolíneas en anunciar que van a ofrecer conexión a Internet vía Starlink a bordo de...
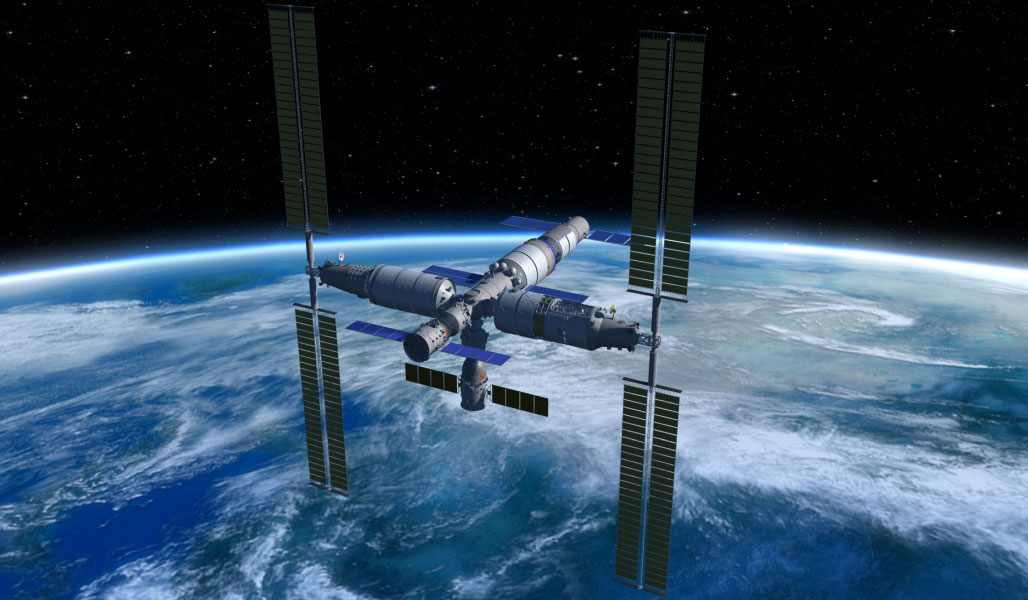
This is amazing. In a lecture given to high school students, Yang Hong, Chief Designer of China Space Station, showed an animation of the sequences of building the space station. Watch how many steps are needed #Tiangong(Credit: Weibo @vony7_) pic.twitter.com/SiqafNQPJD— China Spaceflight...

Ilustración del Skylab de Lego de SkylabBricks Aunque no tuvo una carrera demasiado productiva el Skylab fue la primera estación espacial estadounidense. Primera y única, se puede argumentar, porque la siguiente en la que participó fue ya la Estación Espacial Internacional. Ahora,...

Urano visto por la Voyager 2 – NASA/JPL Con el objetivo de asegurarse de que tiene sus prioridades alineadas con las de la comunidad científica la NASA le pide cada diez años a las Academias Nacionales de Ciencia, de Ingeniería y de...

#Webb's Mid-Infrared Instrument (MIRI) has reached its operating temperature below 7 kelvins (minus 266 degrees Celsius). Learn more about this milestone, known as the 'pinch point' and why this low temperature is necessary for science operations here: https://t.co/chxhd3Sj7I pic.twitter.com/Wlc7E4hXRK— ESA Webb Telescope...

This narrated 3-D animation describes the tasks the two spacewalkers will conduct to activate a new robotic arm. https://t.co/yuOTrZ4Jut pic.twitter.com/4LLqiXsKKn— International Space Station (@Space_Station) April 18, 2022 En la tarde de ayer, en medio de un estruendoso silencio por parte de la...

El SLS y el VAB durante el traslado del cohete a la plataforma de lanzamiento – NASA Ante la necesidad de Air Liquide de hacer algunas mejoras en la planta con la que suministra nitrógeno gaseoso a la plataforma 39B del Centro...

El SLS en la plataforma de lanzamiento – NASA Una fuga de hidrógeno líquido entre la plataforma de lanzamiento móvil y el cohete SLS de la NASA obligó a parar el tercer intento de carga de propelentes en el cohete. La NASA...

The moment: #Shenzhou13 spaceship lands successfully in north China pic.twitter.com/caalGxtcA4— CGTN (@CGTNOfficial) April 16, 2022 La cápsula Shenzhou 13 tocaba tierra en la zona de aterrizaje de Dongfeng en el norte de China a las 3:56, hora peninsular española (UTC +2), del...

La astrovan en su último servicio llevando a la tripulación de la misión STS-135 a la plataforma de lanzamiento – Wicho Ahora que la NASA está a punto de estrenar su primera nave tripulada¹ después de más de 40 años ha anunciado...
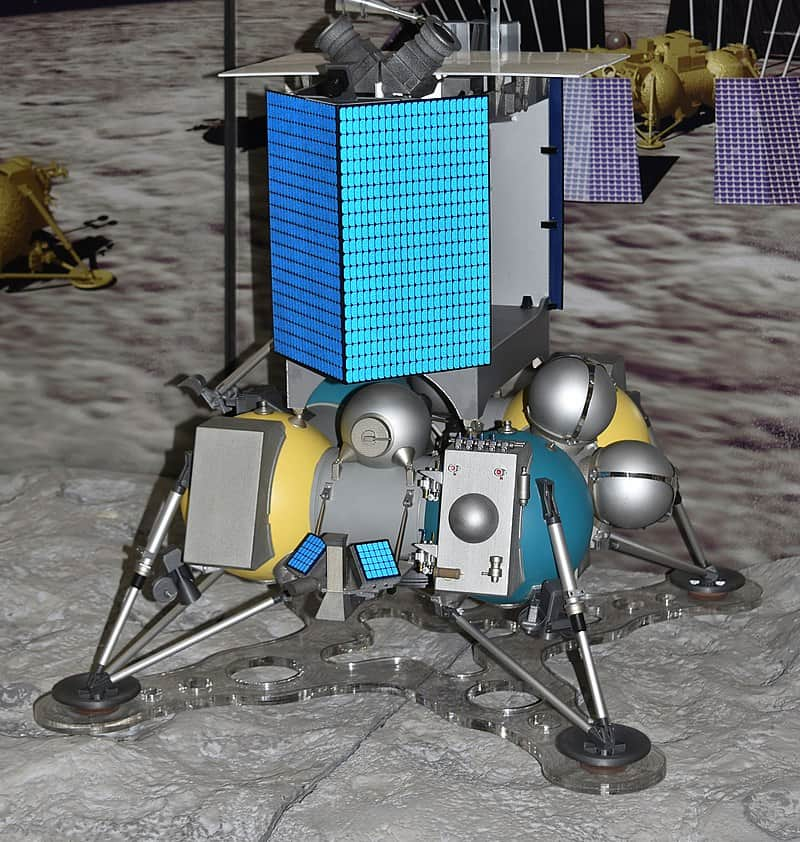
La invasión rusa de Ucrania sigue trayendo consecuencias en el entorno de la investigación espacial. Esta misma tarde cl consejo de la Agencia Espacial Europea (ESA) ha anunciado que, a consecuencia de las sanciones adoptadas por la comunidad internacional contra Rusia, ha...

Tras unos cuantos años de espera por fin la empresa española PLD Space ha conseguido hacer el primer encendido estático de su cohete Miura 1 en sus instalaciones de prueba de Teruel. En las próximas semanas veremos como se hacen más...

Vista general de la Starbase durante las pruebas de carga de un Starship – SpaceX El Cuerpo de Ingenieros del Ejército de los Estados Unidos ha entendido que SpaceX desiste de su solicitud de ampliar sus instalaciones en Boca Chica, Texas –más...
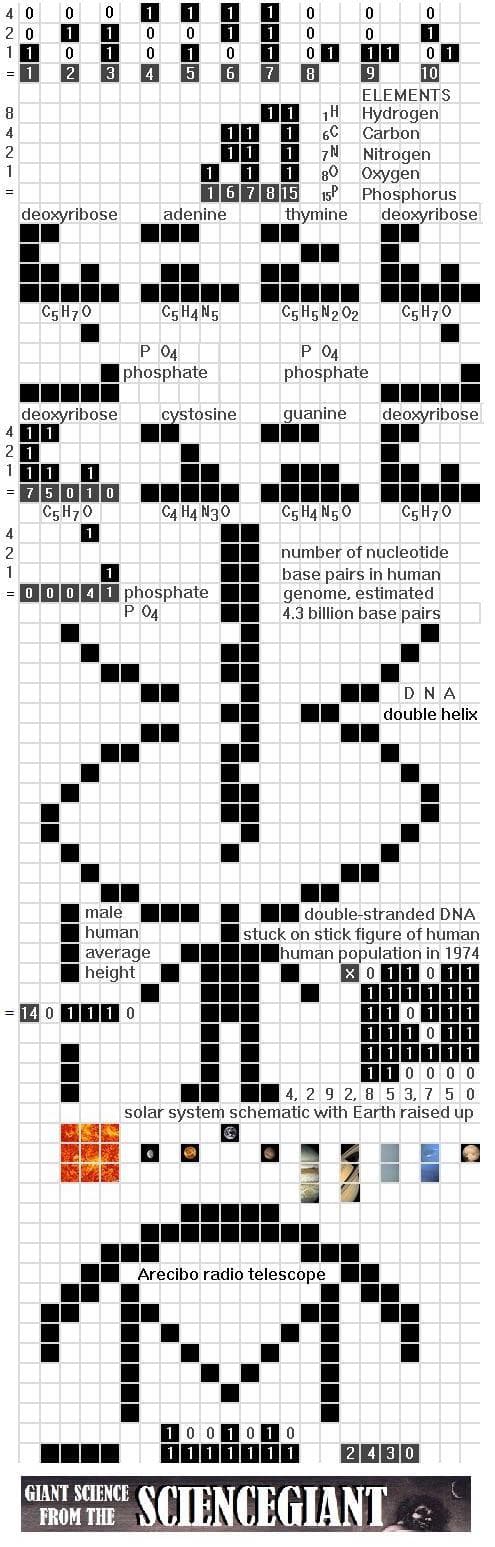
Hace tiempo que en TheScienceGiant alguien subió esta explicación del mensaje de Arecibo, que se emitió por radio en 1974 desde el tristemente ya desaparecido radiotelescopio de Arecibo. El mensaje son básicamente 1679 bits, número que se eligió porque es el producto...

La primera etapa de un cohete Atlas V siendo descargada de un Antonov An-124 - NASA/Kim Shiflett Otra consecuencia más de la invasión rusa de Ucrania es la posibilidad de que se retrasen los lanzamientos de algunos de los satélites más grandes...
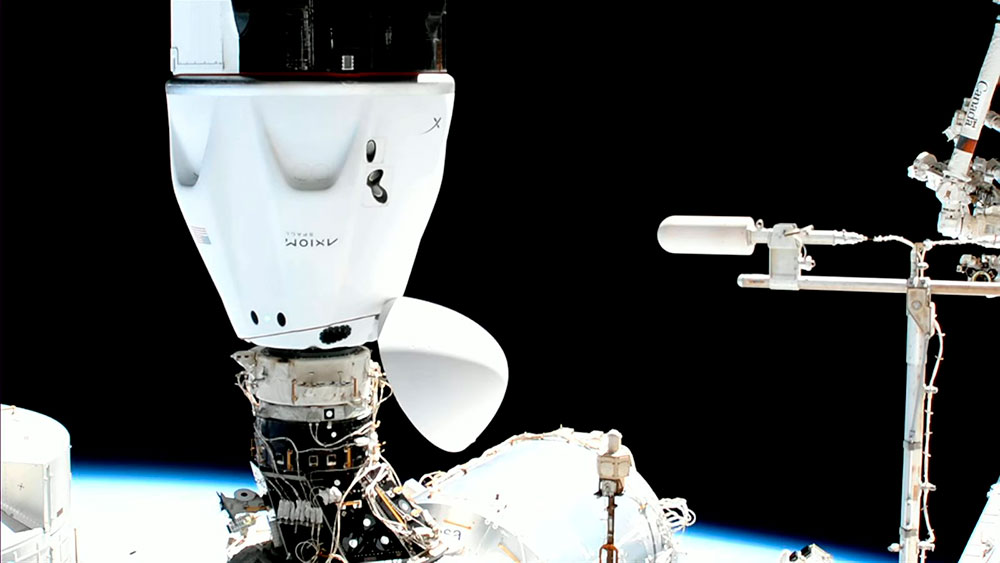
The #Ax1 mission from @Axiom_Space with four astronauts aboard the @SpaceX Dragon Endeavour docked to the station today at 8:29am ET. https://t.co/yuOTrYN8CV pic.twitter.com/FaoRTrKSKC— International Space Station (@Space_Station) April 9, 2022 Hace unos instantes la Crew Dragon Endeavour atracaba en la Estación Espacial...

Impresión artística de un Vega-C en el espacio – Arianespace Una de las primeras reacciones rusas a las sanciones adoptadas por la Unión Europea contra Rusia por la invasión de Ucrania fue la retirada del personal de Roscosmos del Espaciopuerto de Kourou...

Puesto de control de repostaje de un KC-46. Arriba, los monitores del sistema panorámico; abajo los del RVS - USAF/Cabo mayor Cody Dowell Una de las pocas que no vende todavía Amazon son lanzamientos espaciales. Por eso se ha tenido que comprar...

El 21 de noviembre de 2020 la Agencia Espacial Europea lanzaba el satélite medioambiental Sentinel 6 «Michael Freilich» a bordo de un Falcon 9. Desde hoy sus mediciones se convierten en la referencia a la hora de determinar el nivel del...

El SLS visto desde lo alto de la torre de lanzamiento – NASA El pasado 1 de abril la NASA arrancaba el primer intento de cargar propelentes y simular una cuenta atrás para el lanzamiento del cohete SLS. Pero tras tener que...

Este pasado fin de semana Rocket Lab llevó a cabo el lanzamiento número 25 de su historia. La misión, bautizada Without Mission A Beat, que es un juego de palabras con la expresión inglesa equivalente a «sin perder comba» y la...

SpaceX lanzó ayer por la tarde su cuarta misión compartida, conocida como Transporter 4, en la que 40 satélites de distintos propietarios de distintos países fueron puestos en órbita. Fue el lanzamiento número 150 con éxito de la empresa, el séptimo...

Tras un par de cambios de fecha producidos por una baja en la tripulación –o más bien entre los pasajeros– y por meteorología poco adecuada hace unas horas Blue Origin ponía a seis personas más en el espacio por unos minutos....

Impresión artística del despegue del MAV – NASA/JPL Hasta hace unos días la misión para traer a la Tierra las muestras de Marte que recoge allí Perseverance estaba compuesta por un aterrizador que iba a llevar un rover para recogerlas y un...

.@Astro_Sabot and cosmonauts Anton Shkaplerov and Pyotr Dubrov landed back on Earth inside the Soyuz MS-19 crew ship today at 7:28am ET. More... https://t.co/i9QtpYxWGE pic.twitter.com/EazuiF9Ejr— International Space Station (@Space_Station) March 30, 2022 Tal y como estaba previsto la cápsula tripulada Soyuz MS-19...

La Crew Dragon Endeavour atracada en la EEI en la primera misión tripulada de la flota - NASA/Doug Hurley Según se puede leer en SpaceX ending production of flagship crew capsule la presidenta de Gwynne Shotwell ha declarado que la empresa no...

Long March-6A, China’s new-generation medium-sized hybrid engined launch vehicle, conducted a successful maiden flight at 5:50 pm on Tuesday from Taiyuan Satellite Launch Center, sending two satellites into preset orbits. https://t.co/lPWJ0n1l6I pic.twitter.com/HaLu0w9r7S— Global Times (@globaltimesnews) March 29, 2022 Con la puesta en...

El SLS en la plataforma de lanzamiento 39B del Centro Espacial Kenedy – NASA Según se puede leer en Boeing Announces Senior Leadership Updates el próximo 1 de abril Ted Colbert tomará posesión de su nuevo puesto como presidente y director general...

Tianzhou-2 cargo spacecraft separates from China's space station pic.twitter.com/MzcTk8ARRA— CGTN (@CGTNOfficial) March 27, 2022 A las 9:59 del 27 de marzo de 2022, hora peninsular española (UTC +2) el carguero espacial chino Tianzhou 2 se desacoplaba del módulo Tianhe de la estación...

La Cygnus 17 a punto de ser capturada a su llegada a la EEI – Raja Chari/NASA Aunque en las últimas semanas las cosas están bastante tensas en la relación del resto de los socios de la Estación Espacial Internacional (EEI) con...

Tras llevar a cabo la pertinente Flight Readiness Review (Revisión de la preparación de vuelo, FRR) de la misión Ax-1 de Axiom Space la NASA ha autorizado su lanzamiento. Será la primera misión espacial privada tripulada con destino a la Estación Espacial...

I'm proud to partner with @Axiom_Space to have created the meals that will feed the #Ax1 crew on the @Space_Station..paella, pisto con cerdo, jamón ibérico, marcona almonds & more! #Ax1 @FerminIberico @cincojotas @albertadriapro @NASA @CasasdeHualdo @joseandresfoods @CommanderMLA pic.twitter.com/y40VUdzk09— José Andrés (@chefjoseandres) March...

Una astronauta del programa Artemisa observando la superficie de la Luna desde su nave – NASA La NASA anunciaba ayer que quiere adquirir un segundo aterrizador lunar para el programa Artemisa y que para ello pide propuestas a empresas estadounidenses. La idea...
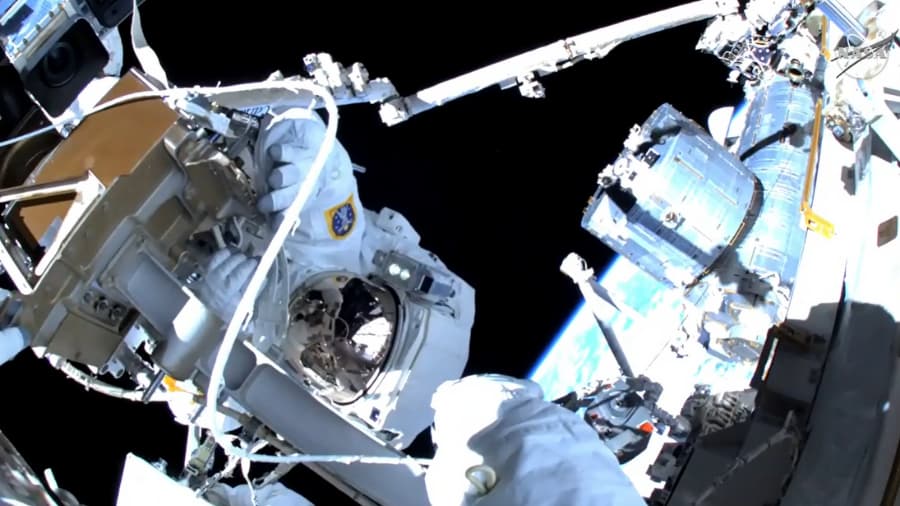
Tal y como estaba programado los astronautas Raja Chari de la NASA y Thomas Maurer de la Agencia Espacial Europea (ESA) completaron ayer un nuevo paseo espacial. Las 6 horas y 54 minutos que pasaron en el exterior de la Estación...

Uno de los dos MiG-29UB que Celestia Aerospace tiene apalabrados – Celestia Aerospace He de reconocer que daba a Celestia Aerospace, la empresa dispuesta a diseñar, construir y lanzar nanosatélites desde España, como desaparecida en acción porque hacía años que no se...

Un cohete Soyuz-2.1b despegando de Vostochny con un lote de satélites OneWeb en marzo de 2021 – OneWeb Una de las muchas consecuencias de las sanciones impuestas a Rusia tras la invasión de Ucrania fue que OneWeb rompiera el contrato que tenía...

Esta pasada noche SpaceX ha llevado a cabo otro lanzamiento de satélites Starlink, en este caso un lote de 53 satélites que fueron colocados en órbita sn problemas. Pero el verdadero interés del lanzamiento está en el hecho de que para...

Three cosmonauts docked to the station's Prichal module inside the Soyuz MS-21 crew ship today at 3:12pm ET. They'll meet the Exp 66 crew in about 2.5 hours. More... https://t.co/ceOb4qU70v pic.twitter.com/HefuWfyl47— International Space Station (@Space_Station) March 18, 2022 A última hora de...

El SLS en la plataforma de lanzamiento 39B del Centro Espacial Kenedy – NASA Tras un paseo de 10 horas y 28 minutos a bordo del transportador 2 el cohete SLS de la NASA con una cápsula Orión en todo lo alto...
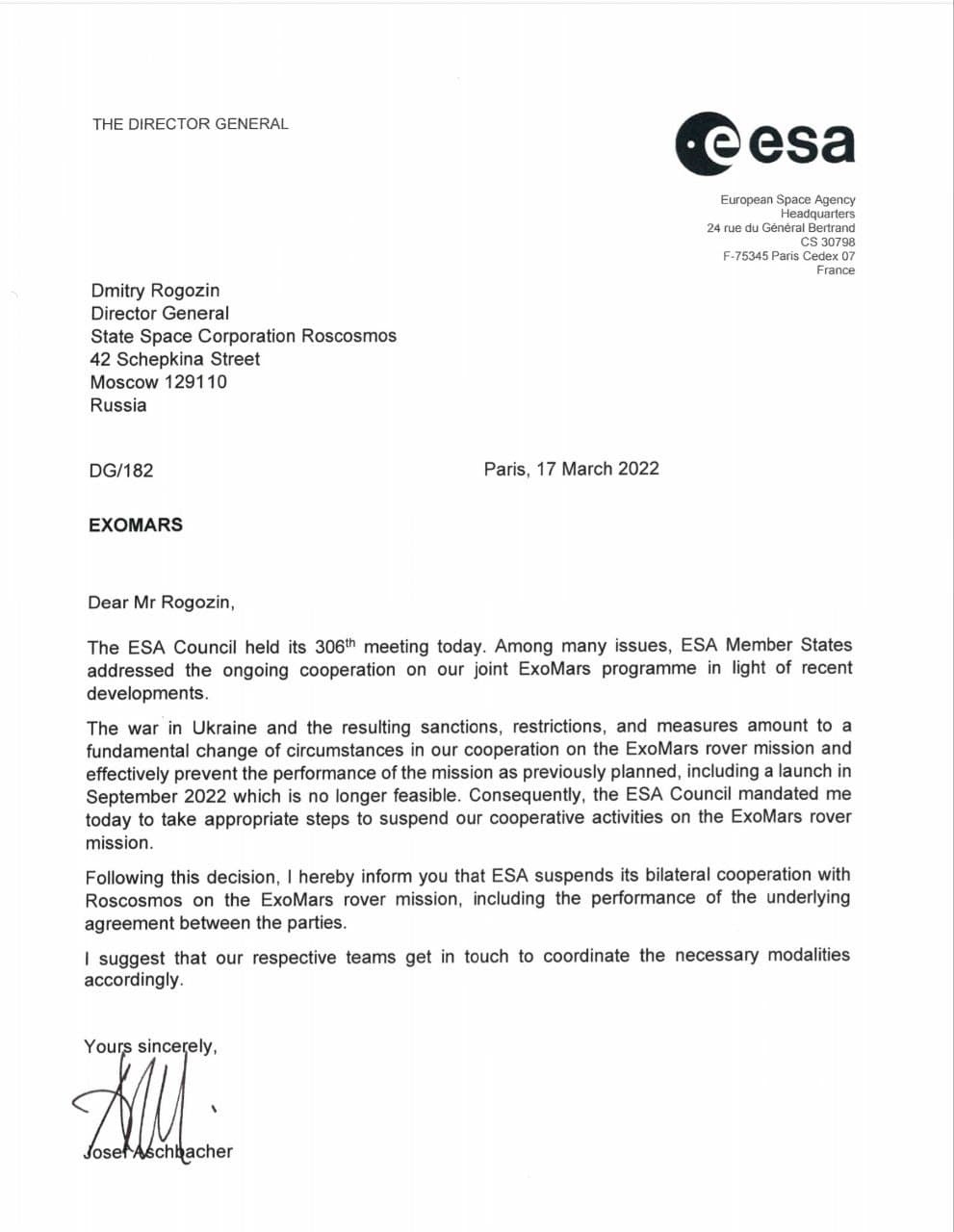
Carta en la que se le comunica a Dmitri Rogozin la suspensión de la misión – ESA Se veía venir después de la ruptura de relaciones entre la Agencia Espacial Europea (ESA) y Roscosmos a causa de las sanciones impuestas a Rusia...
#Ingenuity's flight #21 complete:Animated at 5fps#MarsHelicopter pic.twitter.com/hRn0oG1XqT— 65dBA (@65dbNoise) March 17, 2022 Con 21 vuelos a sus espaldas –estaba diseñado para hacer cinco– la NASA ha decidido extender por segunda vez la misión del helicóptero Ingenuity en Marte. Así que, a menos...
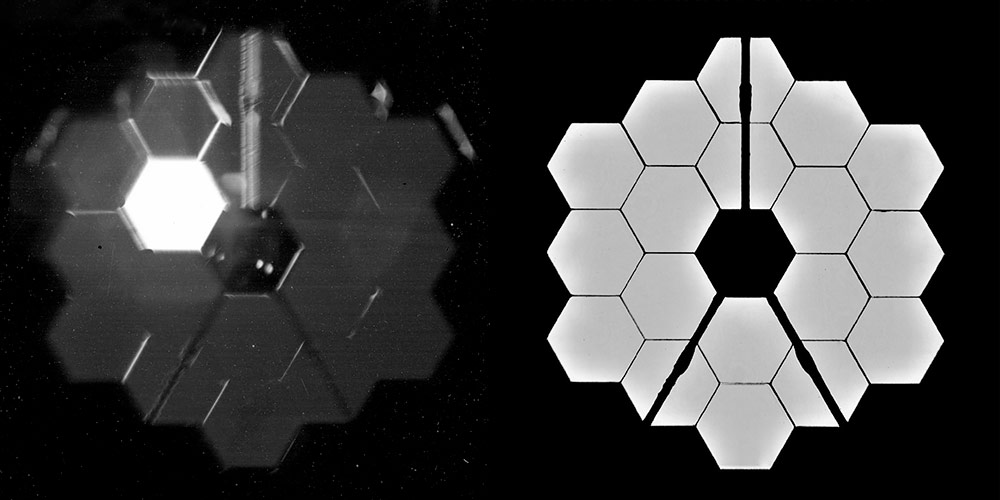
Otra grandísima noticia por parte del equipo del telescopio espacial James Webb: acaban de anunciar que el telescopio ha superado su fase de enfoque fino. Esto quiere decir que la parte óptica del telescopio está perfectamente ajustada. Tan perfectamente ajustada que...

Mark Vande Hei leyendo un libro a bordo de la EEI en agosto de 2021 – NASA El astronauta de la NASA Mark Vande Hei cumplía 341 días seguidos en órbita el 15 de marzo, lo que le convierte en el poseedor...

Aunque las cosas en tierra están tirando a tensas tras la invasión de Ucrania por parte de Rusia, algo a lo que no ayudan nada los tuits y declaraciones incendiarias de Dmitry Rogozin, el director de Roscosmos, a bordo de la...

Era la segunda misión con una carga útil real de un Rocket 3 de Astra. Y tras la supuesta separación de las cargas útiles hubo unos largos minutos de silencio en la retransmisión en directo, que de hecho terminó sin que...
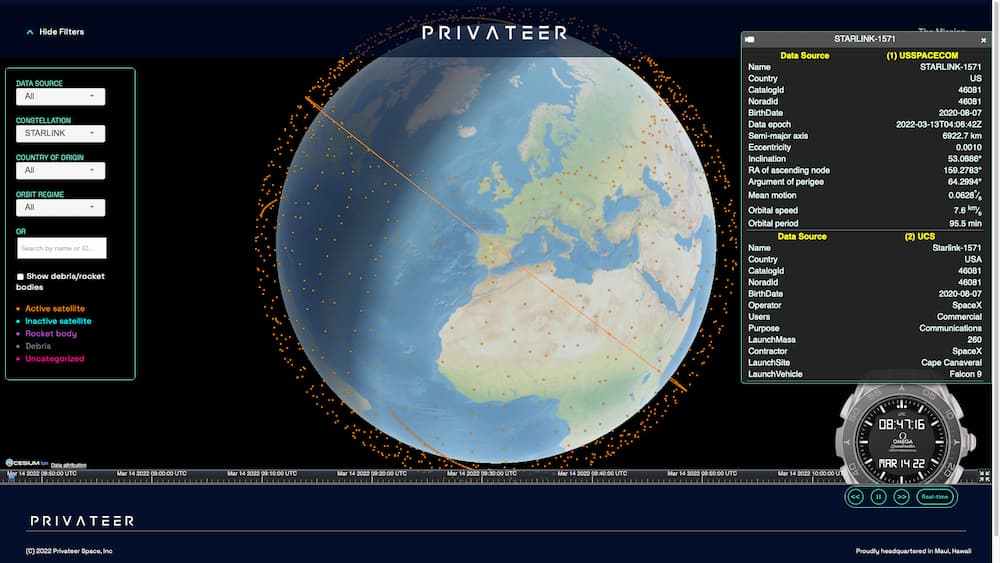
La constelación Starlink en Wayfinder – Privateer Space Tras unos meses funcionando un tanto en secreto Privateer Space, la empresa espacial de Steve «Woz» Wozniak, ha revelado que está desarrollando un sistema de seguimiento de objetos en órbita –satélites activos y basura...

Andan algunos medios estadounidenses un poco exasperados por unas declaraciones que hizo Dmitry Rogozin hace ya unos días en las que decía que lo mismo dejaban al astronauta de la NASA Mark Vande Hei en la Estación Espacial Internacional (EEI) en lugar...

En esta casa no hemos hablado apenas de la épica aventura de Sir Ernest Shackleton y su tripulación en la Antártida, que tuvo lugar de 1914 a 1917. A fin de cuentas ya tenemos a Irreductible para esas cosas. Pero no...

Impresión artística de las instalaciones del Neutrón – Rocket Lab Después de dar más detalles hace unos meses acerca del Neutrón, su cohete de capacidad media, Rocket Lab anunciaba estos días que será fabricado, lanzado, y recuperado en Virginia, en los Estados...

La de ahí arriba es Deimos, una de las dos plataformas marinas de lanzamiento y aterrizaje para el Starship que está construyendo SpaceX. La otra, claro, es Fobos¹. Aunque más que construyéndolas las está adaptando a partir de sendas plataformas petrolíferas...
Los Microsiervos ya tenemos tarjeta de embarque para la misión Artemisa 1 - NASA Como ya viene siendo tradición en los lanzamientos importantes de la NASA de los últimos años la agencia ofrece ahora la posibilidad de incluir tu nombre en la...

Tal día como hoy de 1982 el aterrizador de la sonda soviética Venera 14 se posaba sobre la superficie de Venus. Así que hoy se cumplen 40 años desde la última vez que tocamos la superficie del planeta. Fue apenas unos...

La Crew Dragon Endeavour llegando a la Estación Espacial Internacional con la tripulación Crew–2 – Megan McArthur/NASA No es que le quedaran muchas más opciones ante la incomparecencia de la Starliner de Boeing así que la NASA ha confirmado por fin la...

La sombra de Ingenuity durante su vuelo número 20 – NASA/JPL-Caltech Hace unos días el helicóptero Ingenuity completaba su vuelo número 20 en Marte. En él recorrió 391 metros a una velocidad de 4,4 metros por segundo. En total duró 130,3 segundos....
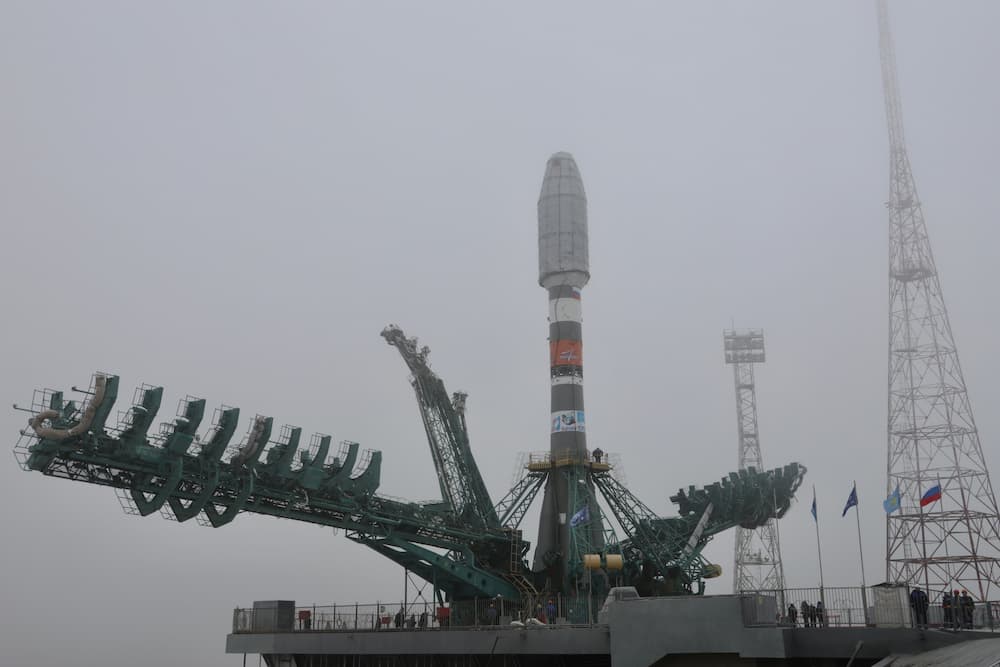
El cohete para el próximo lanzamiento ya estaba en la plataforma – Roscosmos Sorprendiendo aproximadamente a nadie –creo que tampoco a Putin ni a Rogozin– la junta directiva de OneWeb ha decidido cancelar todos los lanzamientos de sus satélites de acceso a...
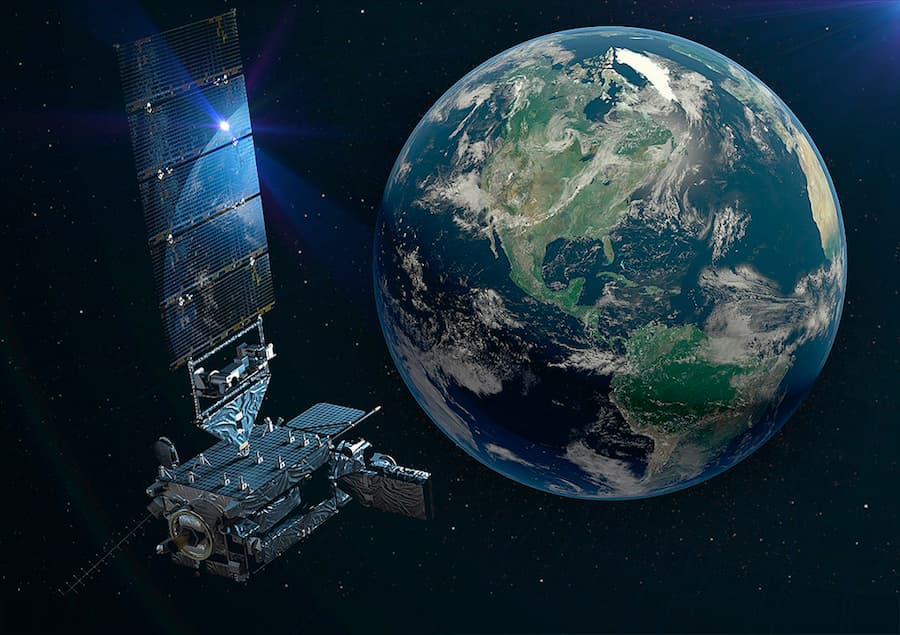
Un cohete Atlas V ponía en órbita en la noche del 1 de marzo de 2022 el satélite medioambiental GOES-T. Es el tercero de la serie GOES-R, y está previsto que le siga un cuarto, el GOES-U. Ocupará una órbita geoestacionaria...

Hace unas horas Rocket Lab lanzaba son éxito la misión número 24 de un cohete Electrón. A bordo iba el satélites StriX β de la empresa japonesa Synspective. Es un satélite de observación terrestre mediante radar de apertura sintética. Con esto...
Impresión artística de Rosalind Franklin y Kazachock recién aterrizados en Marte – ESA/Roscosmos La Agencia Espacial Europea acaba de publicar una declaración acerca de las consecuencias que tendrán las sanciones adoptadas por sus países miembros contra Rusia a causa de la invasión...

Despegue del Sentinel1–B a bordo de un Soyuz ST el 26 de abril de 2016 – ESA–Manuel Pedoussaut, 2016 La invasión rusa de Ucrania va a tener consecuencias que van a afectar a todo el mundo. E incluso un poco más allá:...
Una sola estrella y no 18 copias de la misma – NASA/STScI El telescopio espacial James Webb ya no ve las cosas 18 veces como si fuera un insecto de ojos multifacetados; ahora que los 18 segmentos del espejo principal ya apuntan...
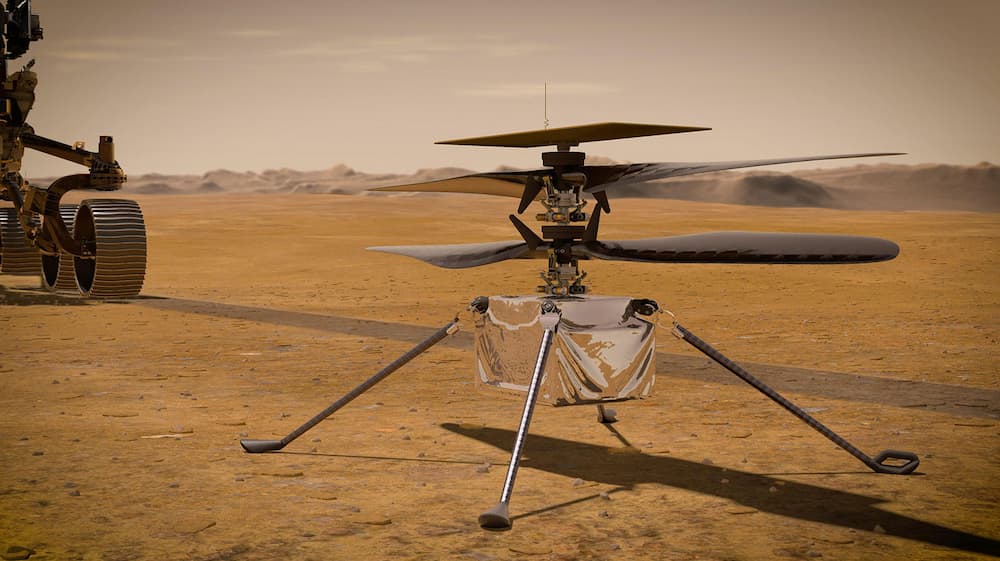
Hace unos días se cumplía un año de la llegada del rover Perseverance de la NASA a Marte junto con su compañero de viaje el helicóptero Ingenuity. A lo largo de este año Perseverance ha estado haciendo cosas de rovers, igual...

He(X)agon marks the spotsLast week, 18 spots helped confirm that each of Webb's mirror segments can see starlight. Now we've arranged those dots into our primary mirror shape, completing the first of Webb's mirror alignment phases: https://t.co/T3pf68Cfvj #UnfoldTheUniverse pic.twitter.com/dYzPqg0EJv— NASA Webb Telescope...

Your shipment of science, supplies, and snacks has arrived! At 4:44am ET (9:44 UTC), @NorthropGrumman's S.S. Piers Sellers #Cygnus spacecraft was captured by the @Space_Station with experiments aboard, including a new way of growing plants without soil: https://t.co/PzKeT2k9Lc pic.twitter.com/osBjDZeHSL— NASA (@NASA) February...

We have liftoff! The @NorthropGrumman S.S. Piers Sellers #Cygnus capsule lifted off atop an Antares rocket at 12:40pm ET (17:40 UTC) to deliver science, supplies, and snacks to the astronauts aboard the @Space_Station. Arrival is set for Feb. 21. pic.twitter.com/OWKmapPQVL— NASA (@NASA)...

It is a marvel to see this fearless aviator finally receive her Astronaut Wings at the #FAA Commercial Spaceflight meeting in DC. #WallyFunk is indefatigable and extraordinary. It felt special to see one of my heroines wearing her shiny wings.#mercury13 #astronaut @blueorigin...

The uncrewed Russian Progress 80 spacecraft automatically docked to the station’s Poisk docking compartment at 2:03am ET, delivering nearly three tons of food, fuel, and supplies to the orbiting lab. https://t.co/xGcjkSH4Bx pic.twitter.com/K6mJSRNb3A— International Space Station (@Space_Station) February 17, 2022 Tal y como...
#OTD, 1969. Pete Conrad descends the ladder to become the 3rd human to set foot on the Moon. Bean, "Let me get the old camera on you, babe" Bean's reflection can now be seen in the hatch, bending over to take the...
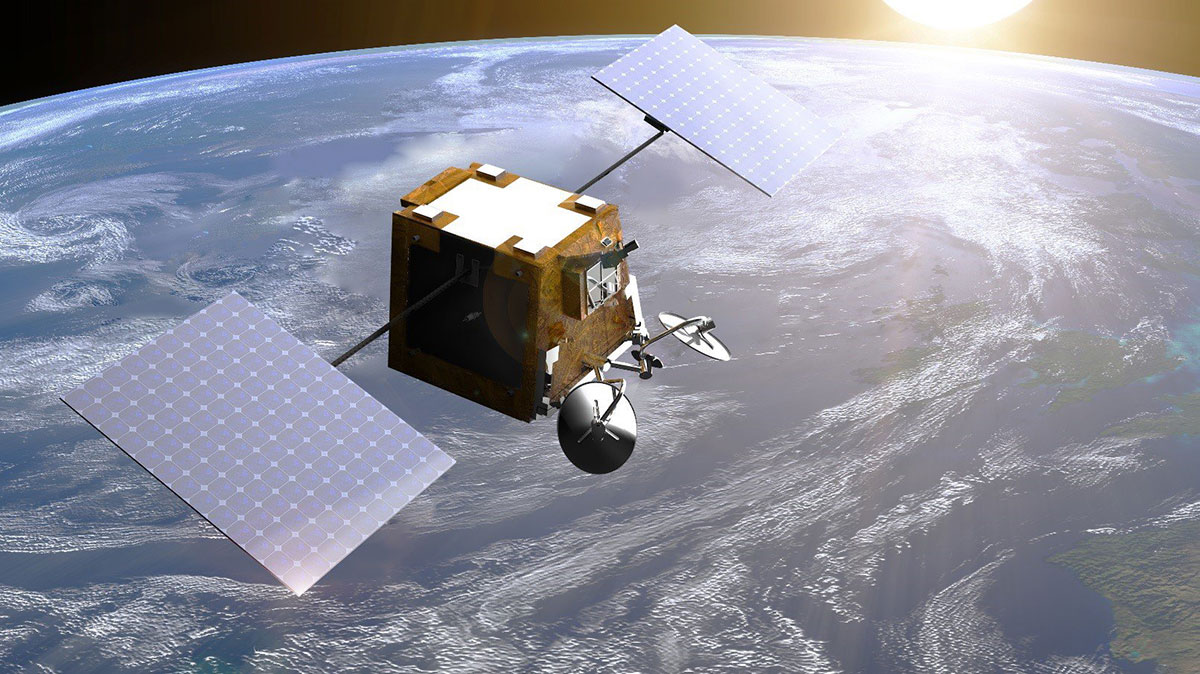
Impresión artística de un satélite OneWeb en órbita; tras el Brexit el Reino Unido está construyendo su propia constelación de acceso a Internet con OneWeb - OneWeb Cuentan en SpaceNews que la Unión Europea está dispuesta a construir a toda costa su...

Un Cosmódromo de Baikonur cubierto de niebla y nieve, lo que dio lugar a unas imágenes espectaculares, vio como hace unas horas era lanzada la cápsula de carga Progress MS-19 rumbo a la Estación Espacial Internacional (EEI). Es la Progress número...

Impresión artística de la misión Polaris Dawn en órbita – SpaceX/Programa Polaris SpaceX acaba de hacer pública la existencia del programa Polaris. En él busca expandir las capacidades de sus vehículos en lo que se refiere a misiones tripuladas. Constará de tres...
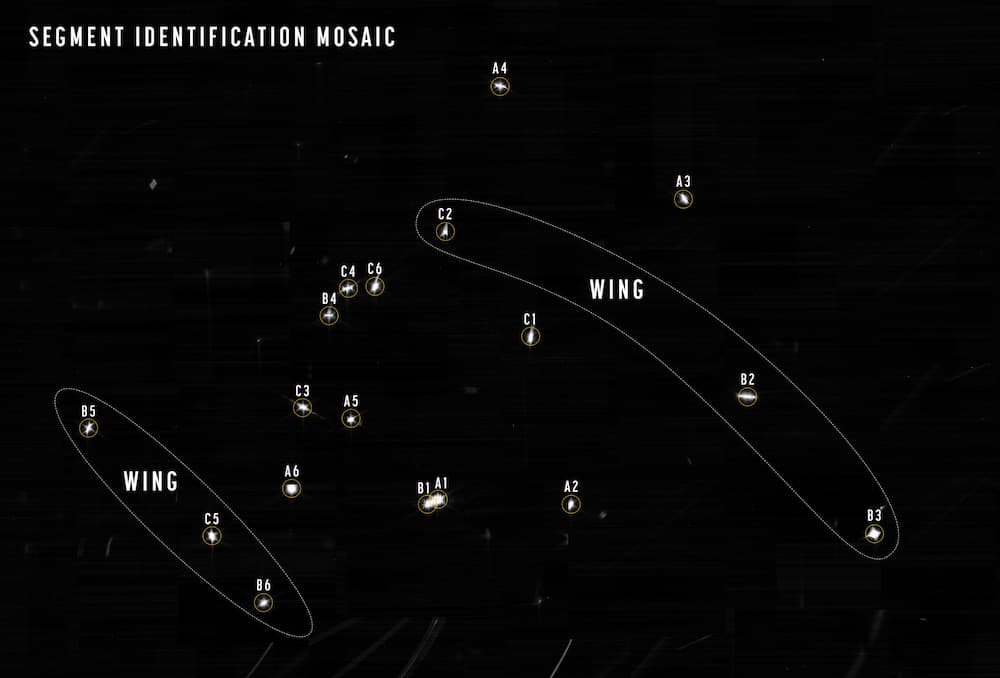
Hace unos días hablábamos de cómo el telescopio espacial James Webb empezaba a recibir luz de las estrellas tras la activación de la NIRCam. Decíamos que iba a verla 18 veces, una vez por espejo de los que forma el espejo...

Elon Musk hizo anoche la primera actualización desde septiembre de 2019 acerca del estado del desarrollo del Starship más allá de sus tuits. Una versión muy TL;DR, en especial si no quieres perder la hora y veinte minutos que dura el...

Staging 1-2, but lost it as upper stage ignited. pic.twitter.com/w1n6IOYtcu— Chris Bergin - NSF (@NASASpaceflight) February 10, 2022 Tras varios aplazamientos Astra lanzó hoy la misión ELaNa 41 para la NASA. Era el primer lanzamiento real de uno de sus Rocket 3;...
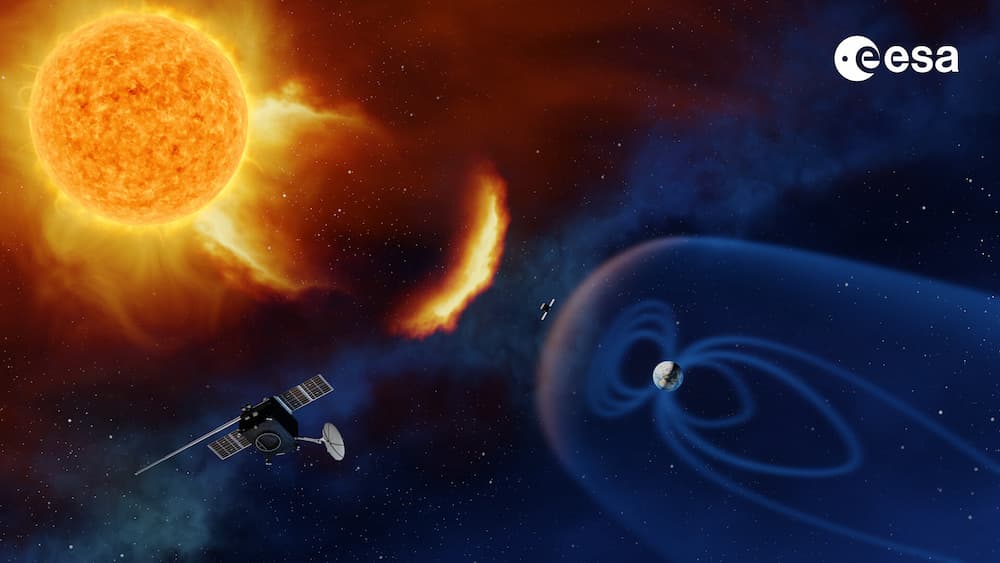
Antes conocida medio informalmente como Lagrange porque va a estar ubicada en el punto de Lagrange L5 del sistema Sol–Tierra, la misión de meteorología espacial de la Agencia Espacial Europea (ESA) acaba de recibir su nombre oficial, Vigil. Su lanzamiento está...

Lanzamiento de la misión – SpaceX El jueves 3 de febrero de 2022 SpaceX lanzó un lote de 49 satélites Starlink. El viernes 4 una tormenta geomagnética moderada impactó la Tierra. Pero aún no siendo muy intensa uno de sus efectos fue...
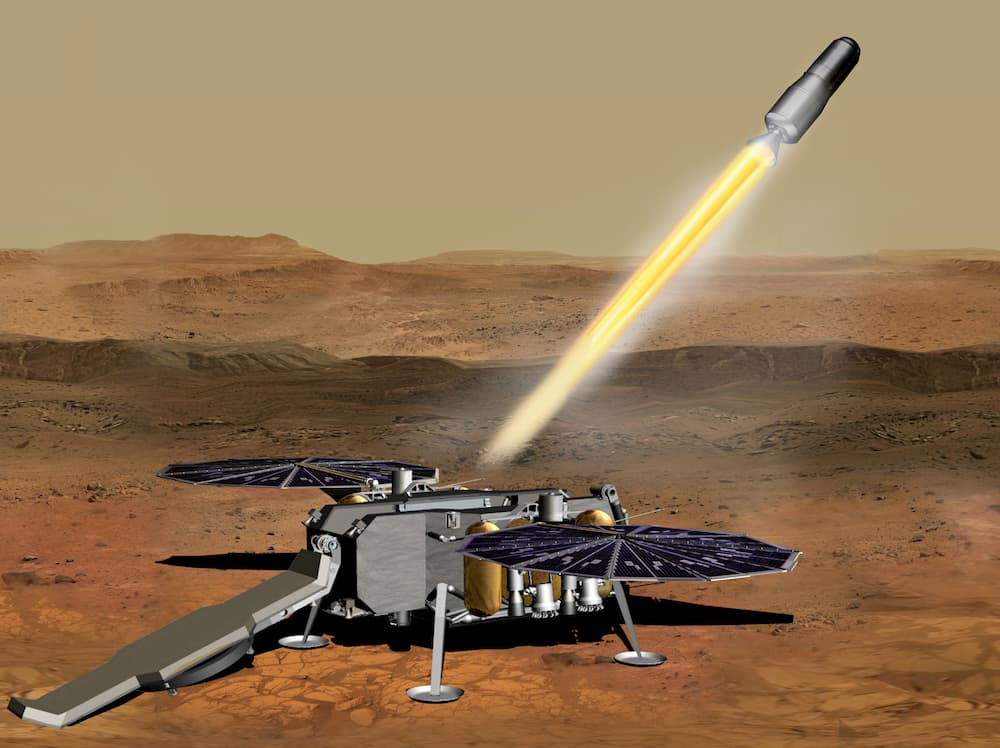
Despegue del MAV – NASA JPL Caltech Ya sabíamos que Airbus se va a encargar de diseñar –y probablemente construir– el rover que va a recoger las muestras que está tomando ahora mismo Perseverance en Marte y también la nave que las...
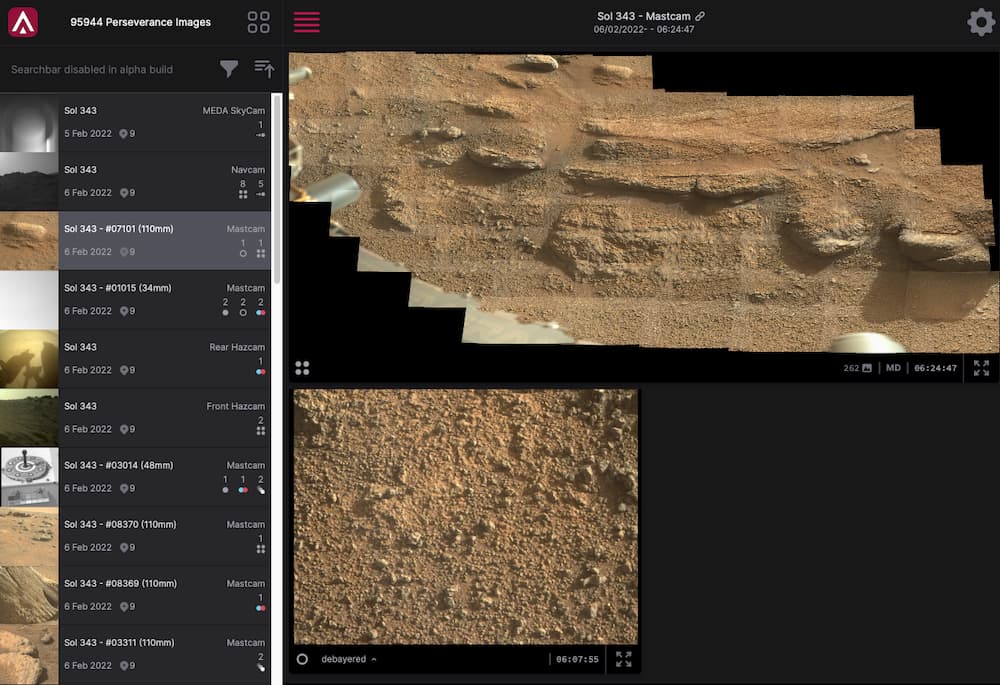
Areobrowser por Matt Brealey Una de las cosas de las que más podemos disfrutar quienes somos del ramo del espaciotrastorno es de las imágenes que llegan de la superficie de Marte por cortesía de los rovers Curiosity y Perseverance y del helicóptero...

This rock almost looked surprised that I was coming back! Thankfully, I was able to collect another sample here to replace the one I discarded earlier. This may be one of the oldest rocks I sample, so it could help us understand...
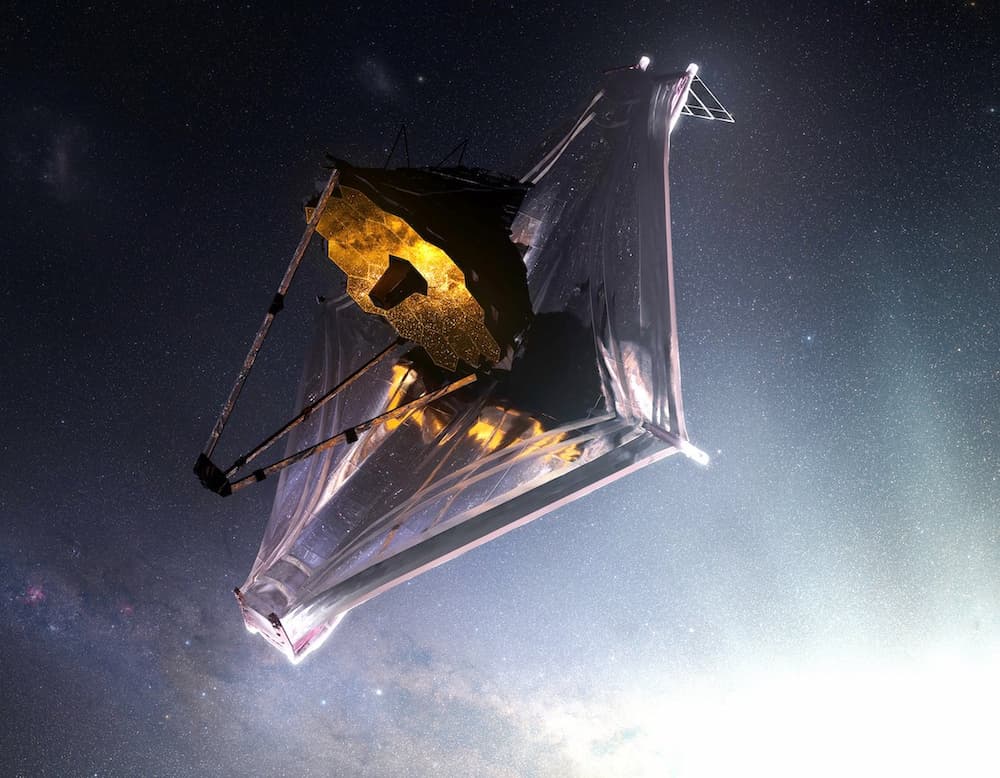
Our NIRCam instrument's detectors saw their 1st photons of starlight! While #NASAWebb is not yet ready for science, this is the first of many steps to capture images that are at first unfocused, used to slowly fine-tune the optics: https://t.co/Sak6r7Ncex #UnfoldTheUniverse pic.twitter.com/vHRX8x9ki2—...

SpaceX ha dicho que este año calcula hacer hasta 52 lanzamientos orbitales. Eso es una media de uno por semana. Pero para ir manteniéndola por posibles pausas en los lanzamientos esta semana ha hecho tres lanzamientos y tres aterrizajes en tres...

El SLS dentro del Edificio de ensamblado de vehículos (VAB) – NASA No sé si la NASA se lo ha pensado muy bien a la hora de anunciar precisamente hoy un nuevo retraso en el primer lanzamiento del megacohete SLS (Space Launch...
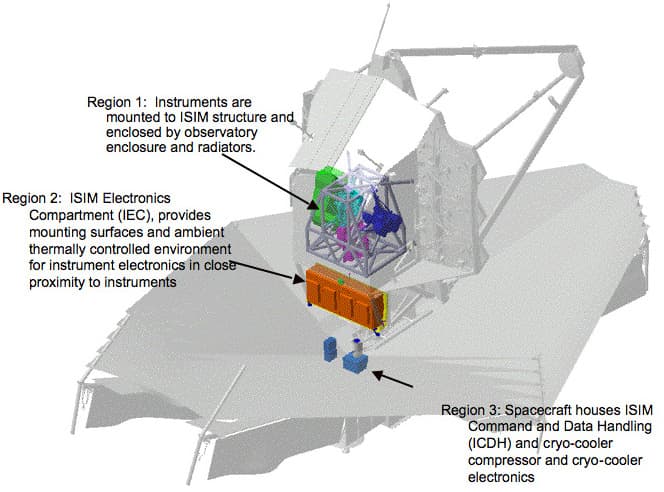
Otra buena noticia desde los alrededores del punto de Lagrange L2 del sistema Sol–Tierra: todos los instrumentos del telescopio espacial James Webb están ya encendidos y responden adecuadamente y como se espera. El Webb monta cuatro instrumentos. Los instrumentos propiamente dichos...

Anoche, después de tres intentos pospuestos por meteorología adversa y un cuarto pospuesto porque un crucero se metió en la zona de seguridad, SpaceX puso en órbita el segundo satélite italiano COSMO-SkyMed de segunda generación. Se trata de un satélite radar...

Si el pasado 1 de enero China nos sorprendía con un par de selfies del orbitador de la misión Tianwen–1 tomados en órbita alrededor de Marte ahora acaba de hacer lo propio con un vídeo para celebrar el año nuevo chino....
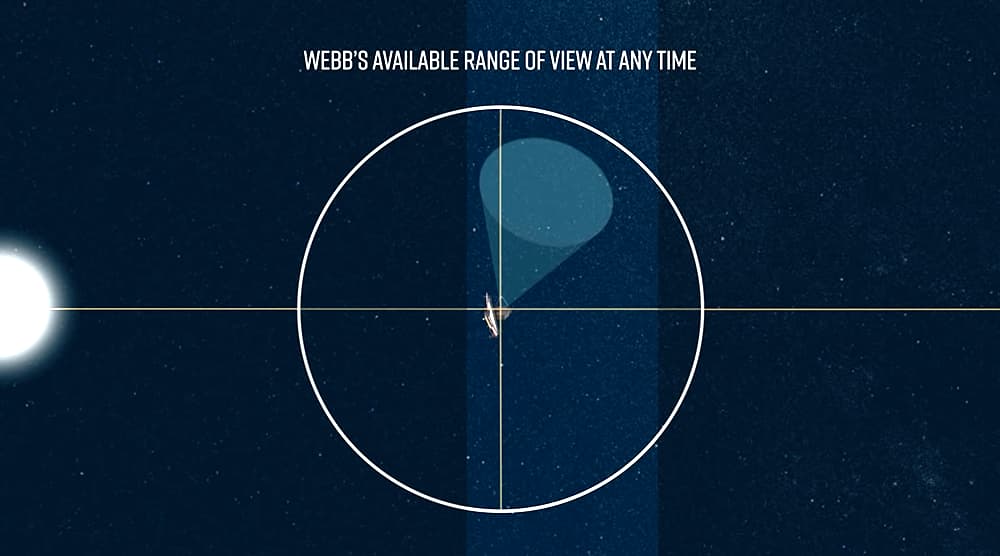
Como ya hemos comentado en varias ocasiones el telescopio espacial James Webb va a pasarse su vida útil en órbita alrededor del punto de Lagrange L2 del sistema Sol – Tierra y apuntando siempre en dirección contraria al Sol con la...

El Miura 1 «respirando» - PLD Space Hoy se ha producido un hecho histórico en las instalaciones de PLD Space en Teruel: la unidad de pruebas de cualificación de su cohete Miura 1 ha sido cargado por primera vez con propelentes. Se...

Laurie Leshin – Caltech Acaba de hacerse público que Laurie Leshin se va a convertir directora del JPL a partir del 16 de mayo de 2022 y que también ha sido nombrada vice presidenta del Instituto de Tecnología de California (California Institute...

Blue Origin acaba de publicar un vídeo con imágenes del interior de su cápsula RSS First Step en la que fue la tercera misión tripulada de la empresa. En él se puede ver a las seis personas que iban a bordo...
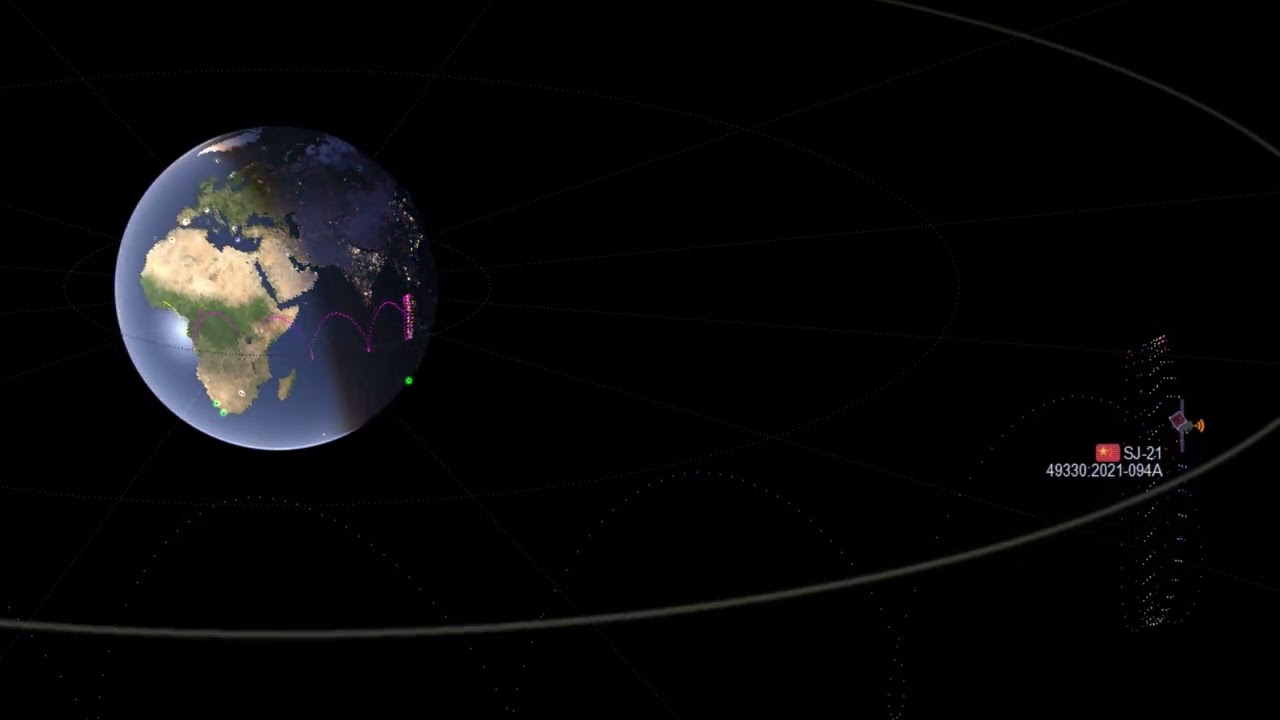
Según un análisis muy convincente recién presentado por Brien Flewelling de la empresa de monitorización del espacio comercial ExoAnalytic Solutions China acaba de sacar un satélite artificial averiado de la órbita geoestacionaria en la que estaba y lo ha dejado en...
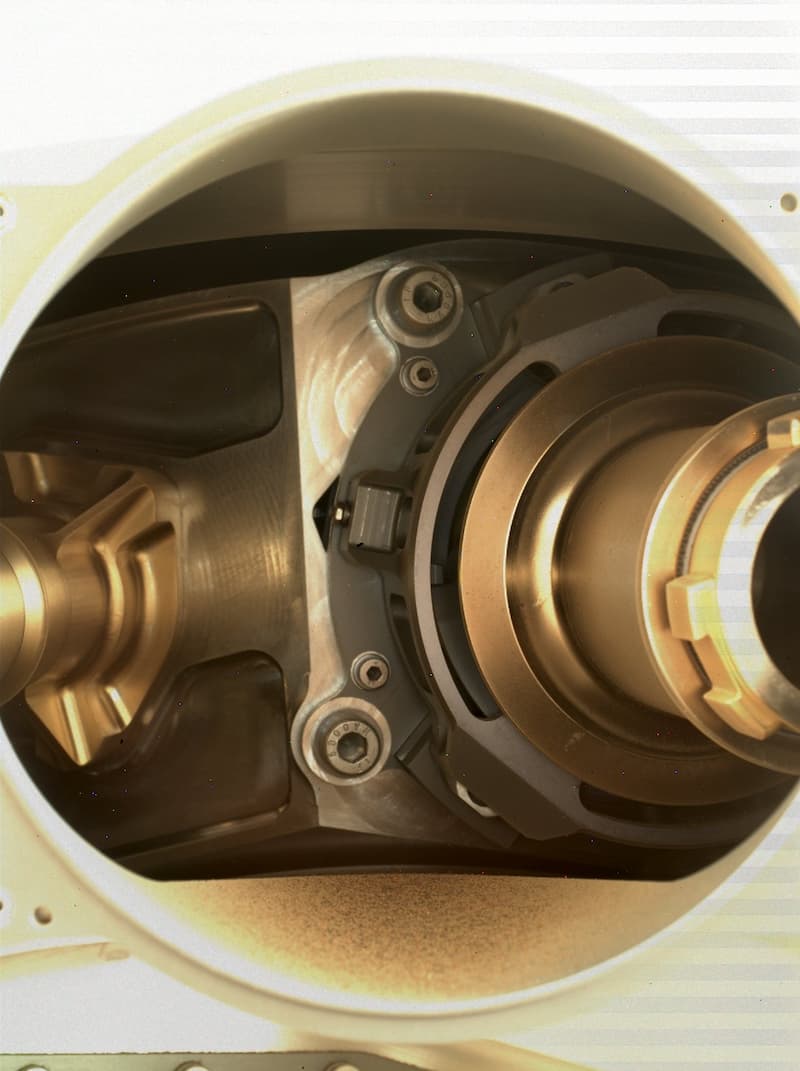
El carrusel de transferencia de tubos de muestras ya sin guijarros – NASA/JPL-Caltech En las últimas semanas el equipo del rover Perseverance de la NASA ha estado peleando con unos guijarros que cayeron de uno de los tubos de muestras y que...

La Dragon 24 disparando sus motores de maniobra a su partida de la EEI - Matthias Maurer/ESA Un amerizaje en el Golfo de México pasadas las 10 de la noche, hora peninsular española (UTC +1), del 24 de enero de 2022 ponía...
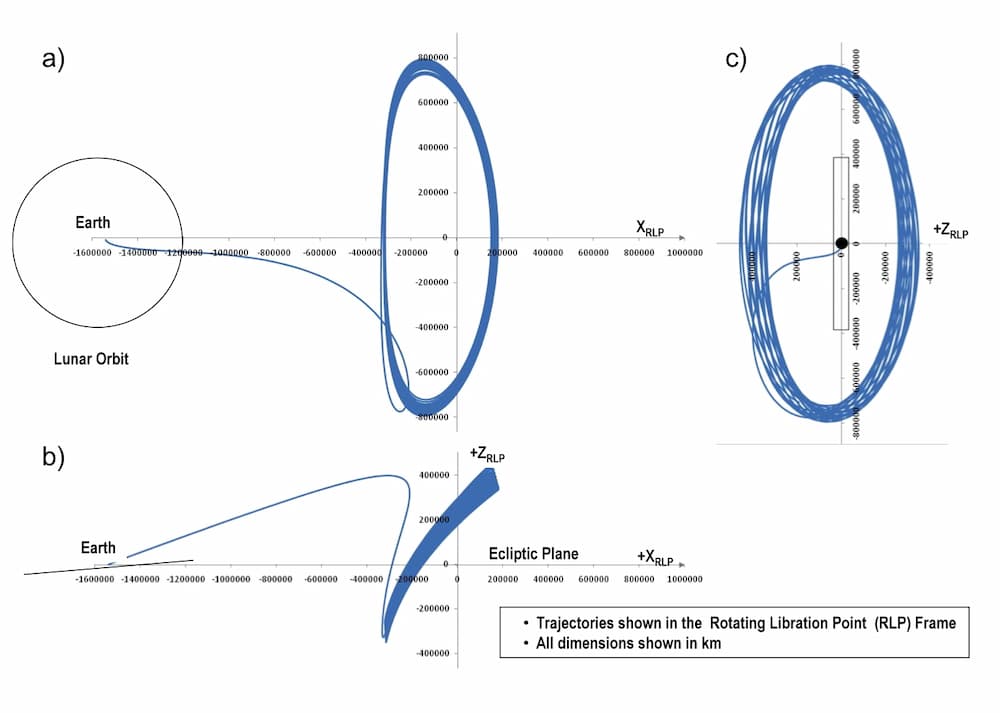
Home, home on Lagrange! We successfully completed our burn to start #NASAWebb on its orbit of the 2nd Lagrange point (L2), about a million miles (1.5 million km) from Earth. It will orbit the Sun, in line with Earth, as it orbits...
Las dos piedras que quedan – NASA/JPL-Caltech En efecto como descubrí hace unos días en las fotos enviadas a Tierra por Perseverance los dos guijarros que estaban delante de la entrada de tubos de muestras ya se han caído. Pero hay otros...

Continuing my creative approach to cleaning: scooping up dirt and using it to knock dust off my solar panel. Every extra power boost I get means bonus time for science, and my fifth round of cleaning seems to be helping!More on this...
En este vídeo mudo del Centro de Investigación Ames de la NASA puede verse cómo son las vibraciones que producen los motores de la torre de escape que se usó en la prueba denominada Ascent Abort-2, en la que se comprobó...

Anna Kikina y Francisco Rubio - Roscosmos/NASA Ya se sabía hace unas semanas que la primera cosmonauta de Roscosmos en volar en una Crew Dragon de SpaceX va a ser Anna Kikina, quien está previsto que vuele en la Crew-5. Y hace...
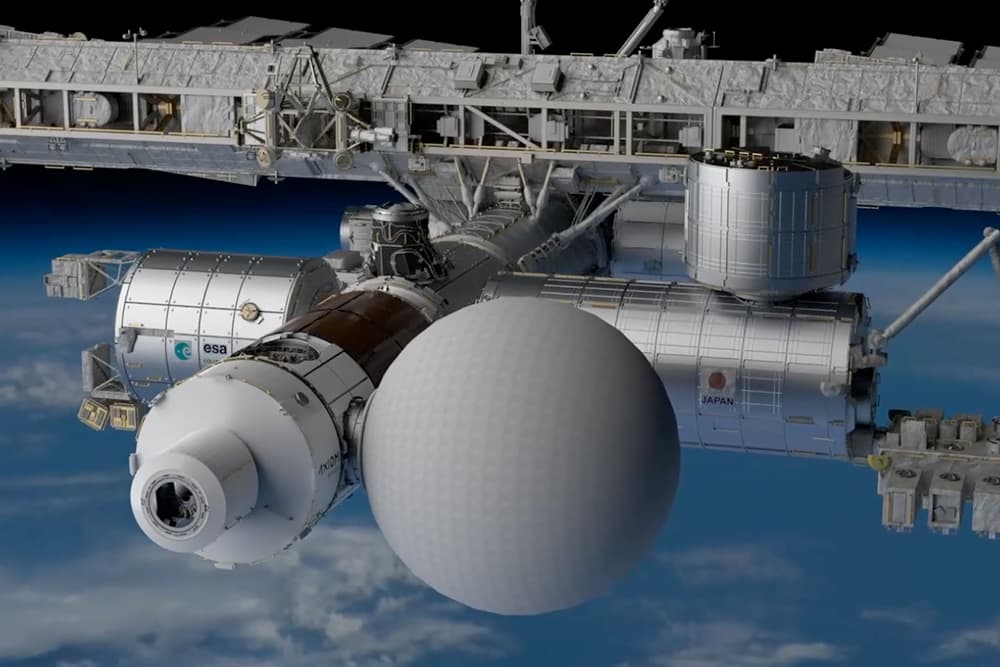
Impresión artística de SEE-1 acoplado a la Estación Espacial Internacional a través de un módulo de la estacion espacial de Axiom. Es la pelota de golf XXXXXL – Space Entertainment Enterprise No recuerdo desde cuándo se habla de la película que Tom...
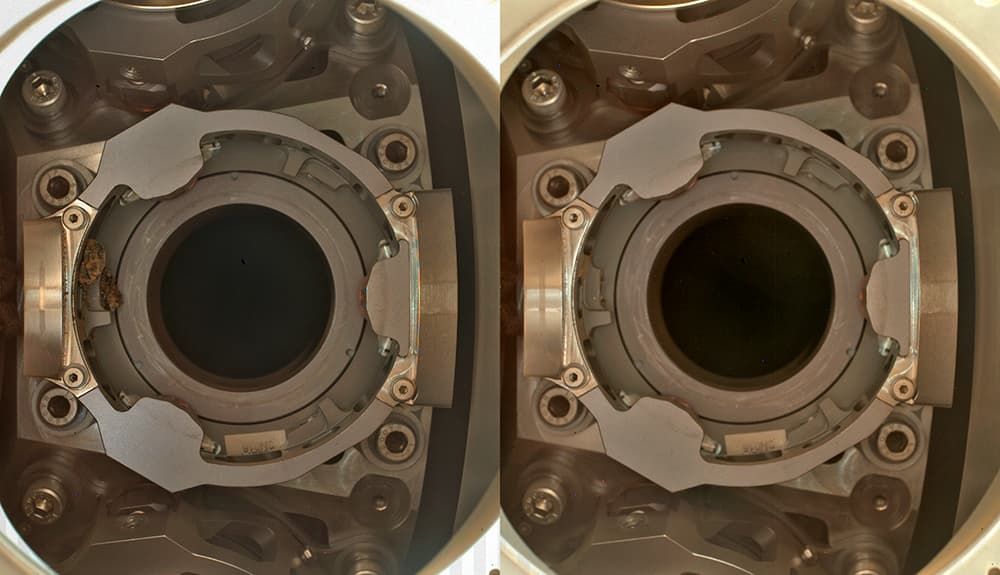
Antes y después de librarse de las piedras – NASA/JPL-Caltech El equipo de la misión aún no ha dicho nada. Pero cotilleando las fotos que ha enviado Perseverance recientemente se puede ver como entre estas dos los guijarros que bloqueaban el sistema...

En la tarde del 19 de enero de 2022 los cosmonautas Pietr Dubrov y Anton Shkaplerov llevaron a cabo el primer paseo espacial dedicado a integrar el módulo Prichal con la Estación Espacial Internacional (EEI). Fue también el primer paseo espacial...
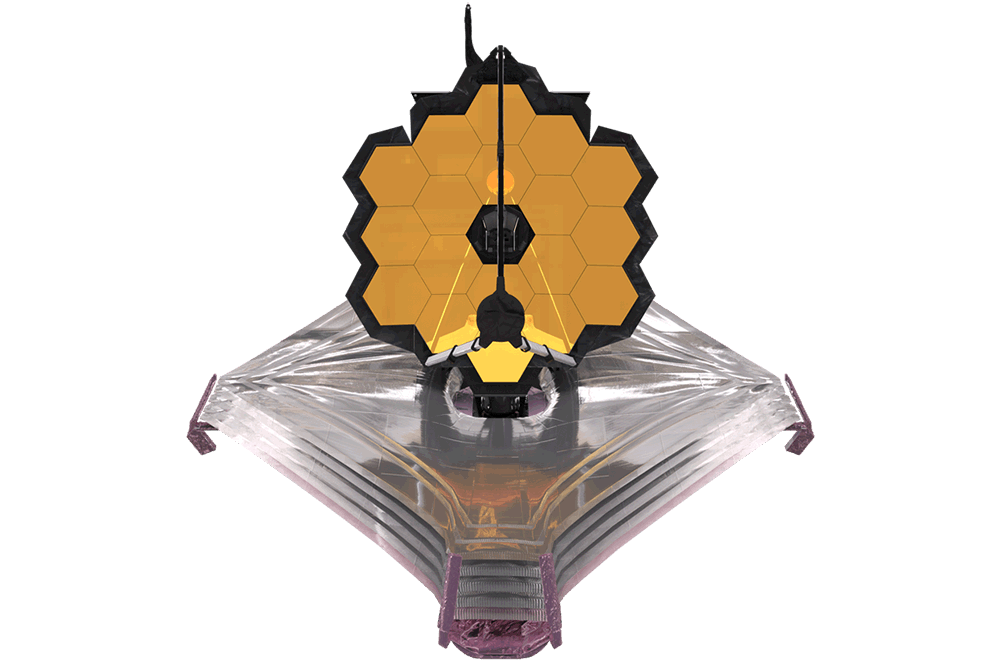
Our mirror segment deployments are complete! Using motors, each segment was moved out about half the length of a paper clip to clear the mirrors from their launch restraints and give each segment enough space for mirror alignment. https://t.co/XWbVLQuch1 #UnfoldTheUniverse pic.twitter.com/d121DHldiX— NASA...
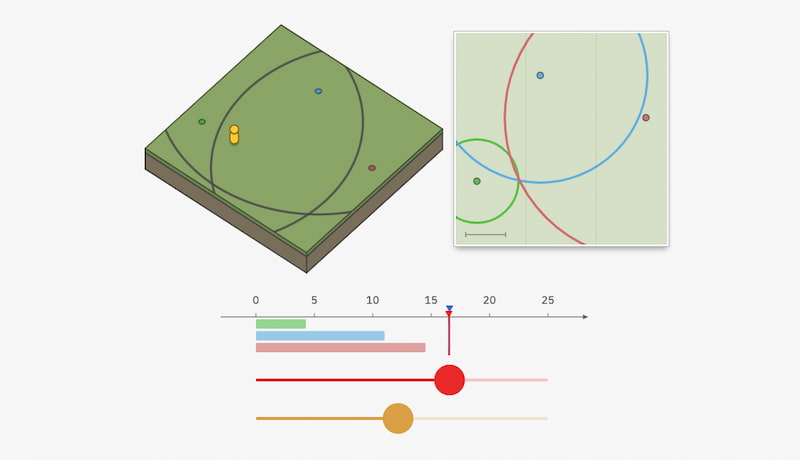
GPS, de Bartosz Ciechanowski es el nuevo artículo interactivo de este creador californiano especializado en la divulgación sobre física, matemáticas e ingeniería. Básicamente describe paso a paso cada uno de los componentes que hacen funcionar el Sistema de Posicionamiento Global y...

La BBC, el divulgador británico Brian Cox y The Open University montaron hace poco esta nueva versión que recrea el clásico Potencias de diez, el minidocumental de Charles y Ray Eames de 1977 que se popularizara al emitirse por televisión en...

Alguien redescubrió una vieja y a la vez tremenda anécdota de la misión STS-27 del transbordador espacial Atlantis en 1988, una de las misiones militares «clasificadas» para poner satélites en órbita, que estuvo a punto de acabar en desastre. Está contada...

Con el lanzamiento de 49 satélites Starlink la pasada noche SpaceX ha superado la cifra de los 2.000 lanzados. En concreto va por los 2.042. Aunque teniendo en cuenta los que han dejado de funcionar y los que ya han sido...

Impresión artística de un Sentinel–1 en órbita El 23 de diciembre de 2021 el radar del satélite de observación terrestre Sentinel 1-B dejó de funcionar. Todos los demás sistemas de a bordo siguen funcionando, por lo que desde el control de la...
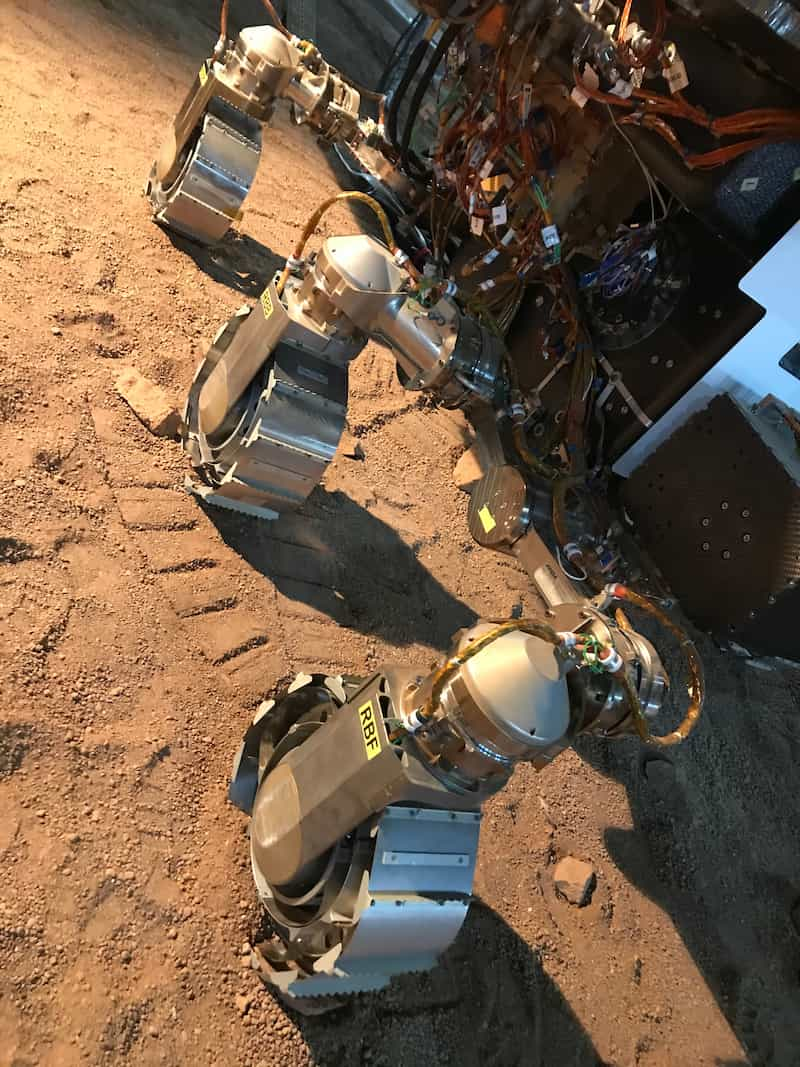
Mientras Rosalind Franklin, el rover de la misión ExoMars de la Agencia Espacial Europea (ESA) y Roscosmos, pasa sus ultimas revisiones junto a su plataforma de aterrizaje Kazachok en una sala limpia de las instalaciones de Thales Alenia Space en Turín...
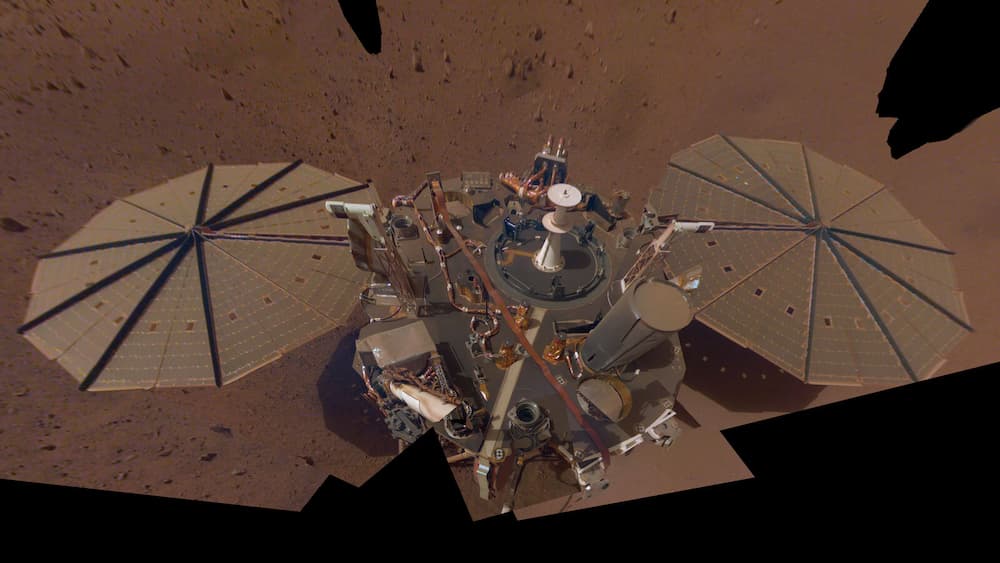
Selfie de una ya polvorienta Mars InSight tomado a principios de 2019 – NASA/JPL-Caltech La Mars InSight, la sonda geóloga de la NASA, lleva desde el 7 de enero en modo seguro a causa de una tormenta de polvo que se ha...
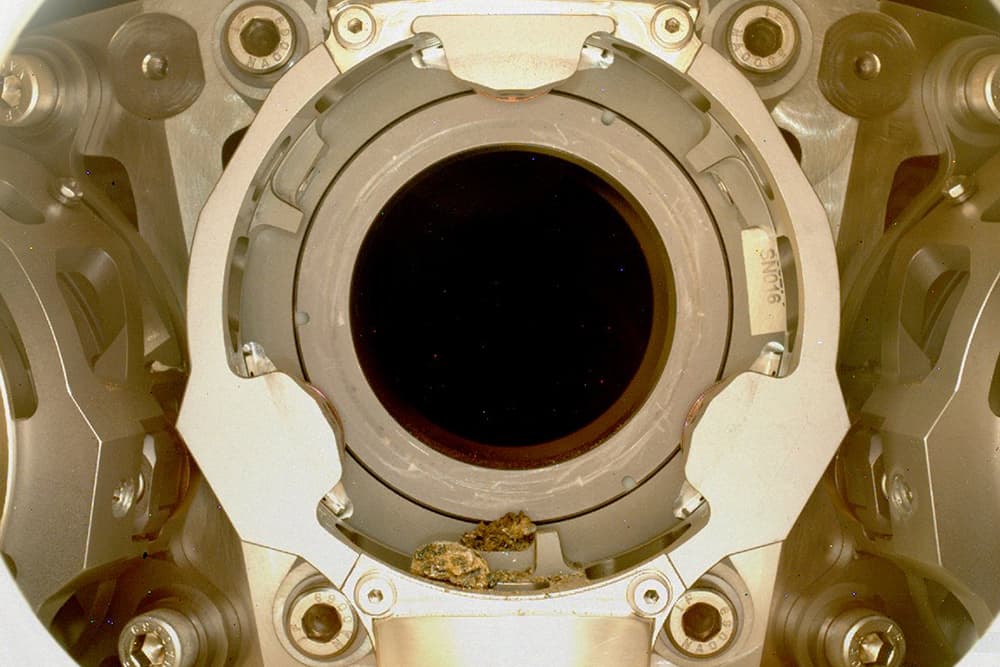
Los guijarros atascados en el carrusel de toma de muestras de Perseverance – NASA/JPL-Caltech/MSSS El pasado 29 de diciembre de 2021, al intentar almacenar la séptima muestra que tomó en Marte, el rover Perseverance de la NASA detectó un problema. Así que,...

Cosmic Girl y el LauncherOne justo después de la suelta – Virgin Orbit Aunque con varias semanas de retraso sobre las previsiones iniciales el tercer lanzamiento comercial de Virgin Orbit, bautizado como Above the Clouds (Sobre las nubes) tuvo lugar el 13...
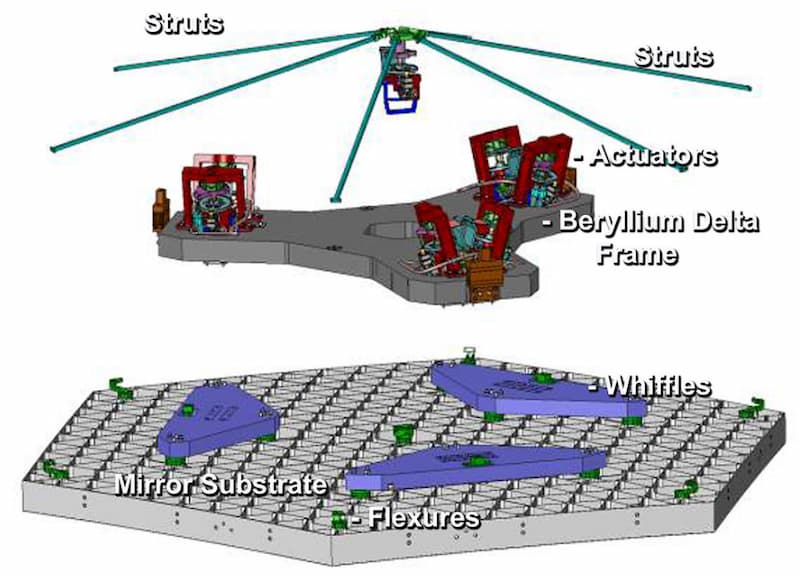
#NASAWebb’s mirrors are warming up their moves!Its 18 primary mirror segments have motors to align them to perform as one big mirror. Today we confirmed that all motors (including those on Webb's other mirrors) are in working order: https://t.co/5YkYMn0FlL #UnfoldTheUniverse pic.twitter.com/G821WqTuii— NASA...

Apenas hace unos minutos SpaceX ha confirmado el correcto despliegue en órbita de los 105 satélites que iban a bordo de su tercer lanzamiento compartido de satélites pequeños, bautizado nada sorprendentemente como Transporter-3. En total han sido 82 despliegues distintos en...

Un mes después de su lanzamiento el observatorio espacial de rayos X IXPE de la NASA acaba de terminar su fase de puesta en marcha y ya está realizando observaciones. Aunque aún quedan por calibrar sus instrumentos de a bordo, para...

Estaba el otro día sufriendo con los episodios de Mar de la Tranquilidad (2021), serie que no recomiendo por múltiples razones, cuando me quedé pensando sobre la pésima solución que utilizan para resolver el tema de la gravedad en la base...

Impresión artística del LCRD en funcionamiento con la Estación Espacial Internacional – NASA/Dave Ryan Desde hace unas semanas está en el espacio la Laser Communications Relay Demonstration (Demostración de relés de comunicaciones láser (Laser Communications Relay Demonstration, LCRD) de la NASA. Forma...

El lado oscuro del Webb tal y como se vería en la realidad – NASA Una pregunta que nos habéis hecho algunas veces durante el recién terminado proceso de despliegue del telescopio espacial James Webb es la de por qué no lleva...

Esta semana la tripulación de la estación espacial china estuvo haciendo pruebas de cara a la ampliación de la estación. Por un lado usaron el brazo robot para mover el carguero Tianzhou-2; por otro usaron el sistema de control remoto para...
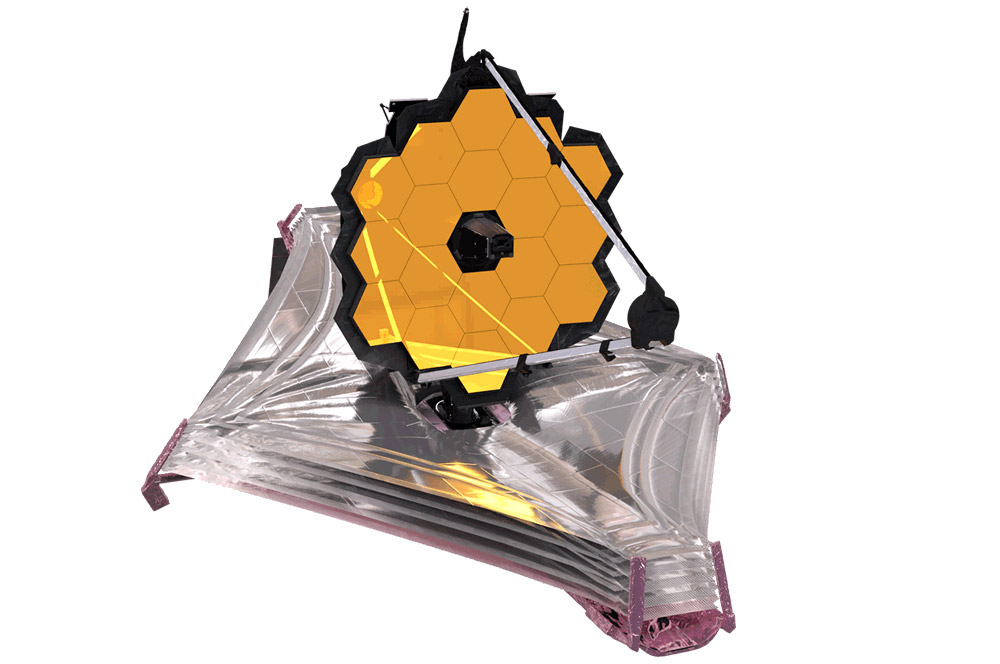
#NASAWebb is fully deployed!With the successful deployment & latching of our last mirror wing, that's:50 major deployments, complete.178 pins, released.20+ years of work, realized.Next to #UnfoldTheUniverse: traveling out to our orbital destination of Lagrange point 2! pic.twitter.com/mDfmlaszzV— NASA Webb Telescope (@NASAWebb) January...
Impresión artística de un SLS despegando – NASA Sorprendiendo aproximadamente a nadie la NASA ha reconocido –aunque a la chita callando- que el primer lanzamiento de un cohete SLS, que tiene que enviar la misión Artemisa 1 rumbo a la Luna, no...

Nope, we’re not just winging it! But we did successfully deploy and latch the first of our two primary mirror wings. These side panels, folded back for launch, each hold 3 of Webb’s 18 mirror segments. Next up: our final wing! https://t.co/xnaWZXYiSx...
Después de unos cuantos años de marear la perdiz con el tema la Agencia Espacial Española ya existe… en el BOE del 31 de diciembre de 2021 [PDF]: Ante la evolución acelerada del sector [espacial], debe alcanzarse un reparto eficaz y eficiente...
La EEI fotografiada durante un paseo espacial el 2 de diciembre de 2021 – NASA Los administración Biden ha anunciado recientemente que los Estados Unidos quieren mantener la Estación Espacial Internacional (EEI) en servicio hasta 2030. O al menos hasta que venga...

Igual que sucediera en 2021 SpaceX ha hecho el primer lanzamiento orbital del mundo en 2022. En la noche del Día de Reyes un Falcon 9 lanzado desde la Plataforma 39A del Centro Espacial Kennedy puso en órbita un lote de...

Space telescope radiators: they’re instrumental!Our “trap door” is now open: the ADIR (Aft Deployable Instrument Radiator) has swung out from the back of the telescope to radiate heat from our science instruments into space. https://t.co/os8QVTpzN3 #UnfoldTheUniverse pic.twitter.com/kwAhvGoRAw— NASA Webb Telescope (@NASAWebb) January...

Secondary mirror deployed! But there's little time to pause and reflect.Teams will ensure @NASAWebb's tripod structure is latched before beginning its final major milestone this week: full deployment of the space telescope's honeycomb-shaped primary mirror. pic.twitter.com/dT9kv5oDqS— NASA Webb Telescope (@NASAWebb) January 5,...

This is it: we’ve just wrapped up one of the most challenging steps of our journey to #UnfoldTheUniverse.With all five layers of sunshield tensioning complete, about 75% of our 344 single-point failures have been retired! pic.twitter.com/P9jJhu7bJX— NASA Webb Telescope (@NASAWebb) January 4,...
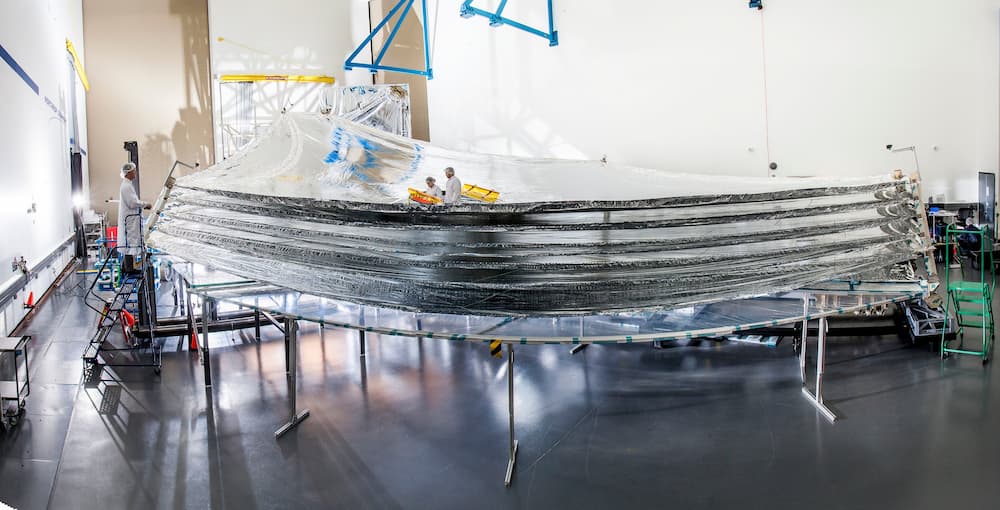
El parasol del Webb tensionado durante pruebas en Tierra; ojo a las personas humanas, que a falta de un plátano, sirven para dar idea de la escala – NASA Aunque en principio iban a iniciar el tensionado del parasol del Telescopio Espacial...
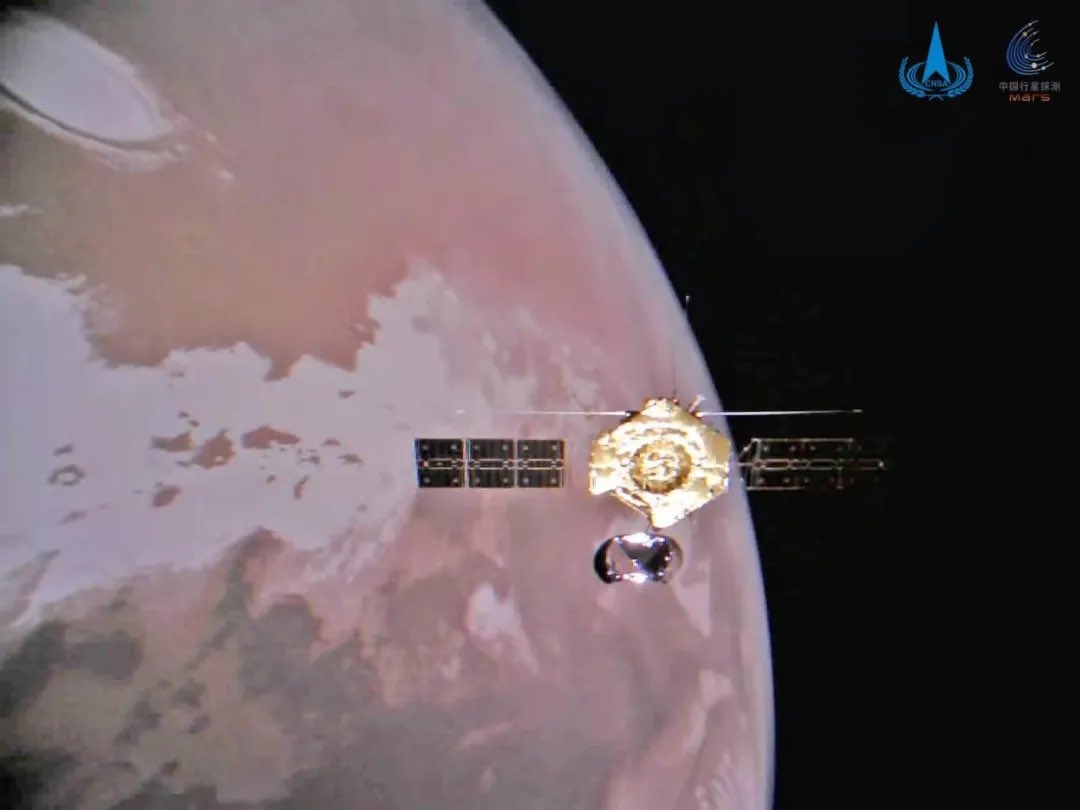
Las dos tomas del orbitador de la misión Tianwen-1 – CNSA/CLEP/PEC Igual que hizo en su momento con el espectacular selfie de familia del rover Zhurong sobre la superficie de Marte China nos acaba de sorprender con dos fotos del orbitador...
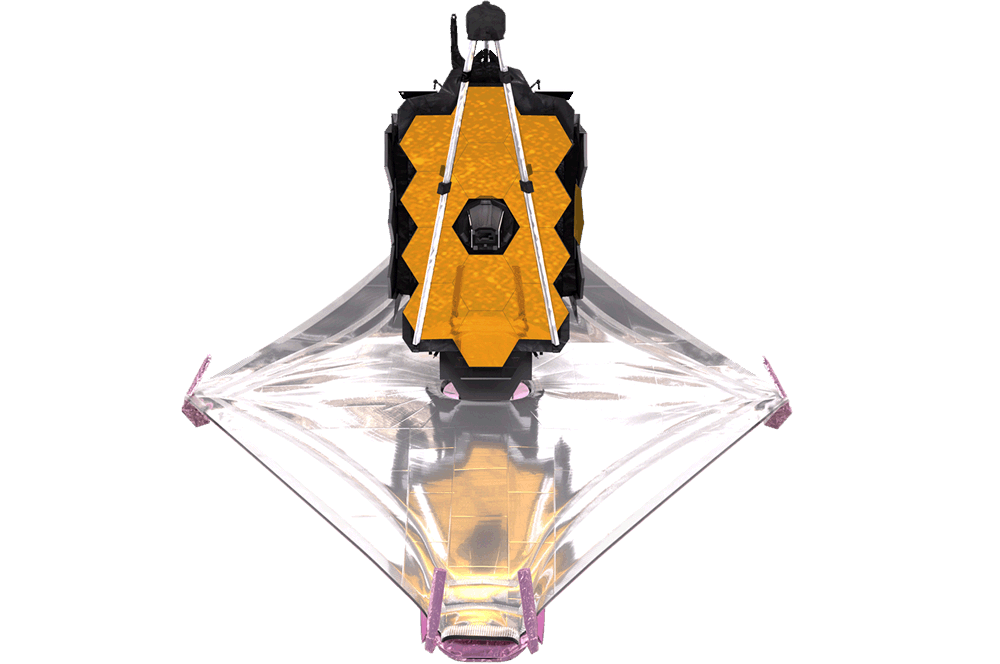
Shine bright like a diamondWith the successful deployment of our right sunshield mid-boom, or “arm,” Webb’s sunshield has now taken on its diamond shape in space. Next up: tensioning the 5 sunshield layers! https://t.co/6G2caS1djY #UnfoldTheUniverse pic.twitter.com/q0iuHdnKlN— NASA Webb Telescope (@NASAWebb) January 1,...
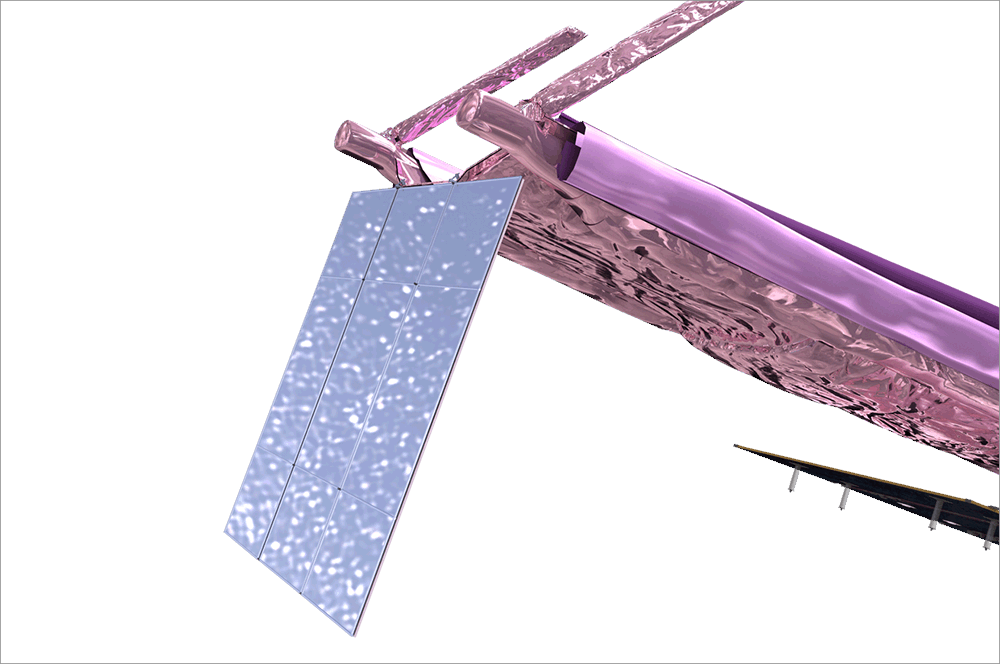
We just successfully deployed our aft (back) momentum flap, which helps balance pressure from solar radiation on Webb's sunshield, much like a trim tab helps stabilize a boat or plane! ✈️ Sail on, Webb! https://t.co/mY5CEFzm3T #UnfoldTheUniverse pic.twitter.com/CVAzB6wFhP— NASA Webb Telescope (@NASAWebb) December...

Heads up! At ~9am ET we began to extend #NASAWebb's Deployable Tower Assembly, which creates space between the spacecraft & telescope, helping to keep the telescope cold & giving the sunshield room to deploy. This could take 6+ hours. https://t.co/h3q2S1MvtW #UnfoldTheUniverse pic.twitter.com/huGb7VO6nG—...

El Telescopio Espacial James Webb necesita dos consumibles para funcionar: electricidad y combustible. Lo de la electricidad está solucionado con su panel solar. Y dado que no está previsto que el Sol se apague ningún día de estos mientras el panel...

Despegue del lanzamiento orbital número 145 de 2021 – vía Seger Yu A primera hora de la tarde del 29 de diciembre de 2021 un cohete Larga Marcha 3B despegaba con el satélite telecomunicaciones Tongxin Jishu Shiyan-9 para colocarlo en órbita de...
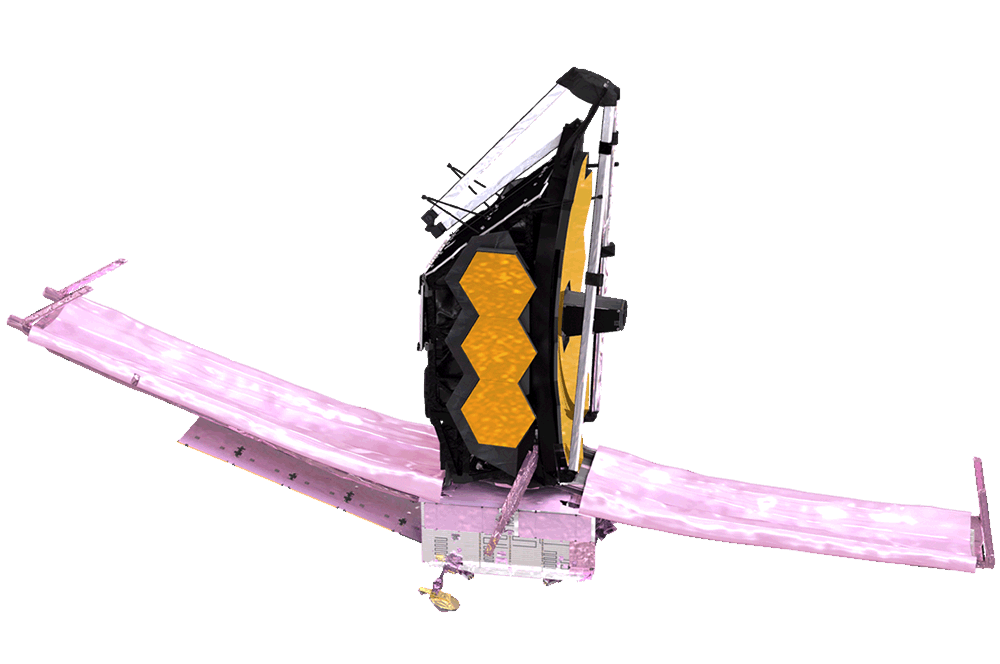
And we just confirmed that our aft (back) sunshield pallet has successfully opened up as well! https://t.co/la05MOFIIEWhat’s next to #UnfoldTheUniverse? Check out https://t.co/NXe96U821e pic.twitter.com/F0B9Z1lUiQ— NASA Webb Telescope (@NASAWebb) December 29, 2021 Dos pasos más del despliegue del Telescopio Espacial James Webb superados:...

Hace unas horas Rusia lanzaba desde el Cosmódromo de Plesetsk el tercer cohete Angará A5 en la que se suponía que iba a ser el último lanzamiento de prueba de este cohete antes de su entrada en servicio. Pero la nueva...
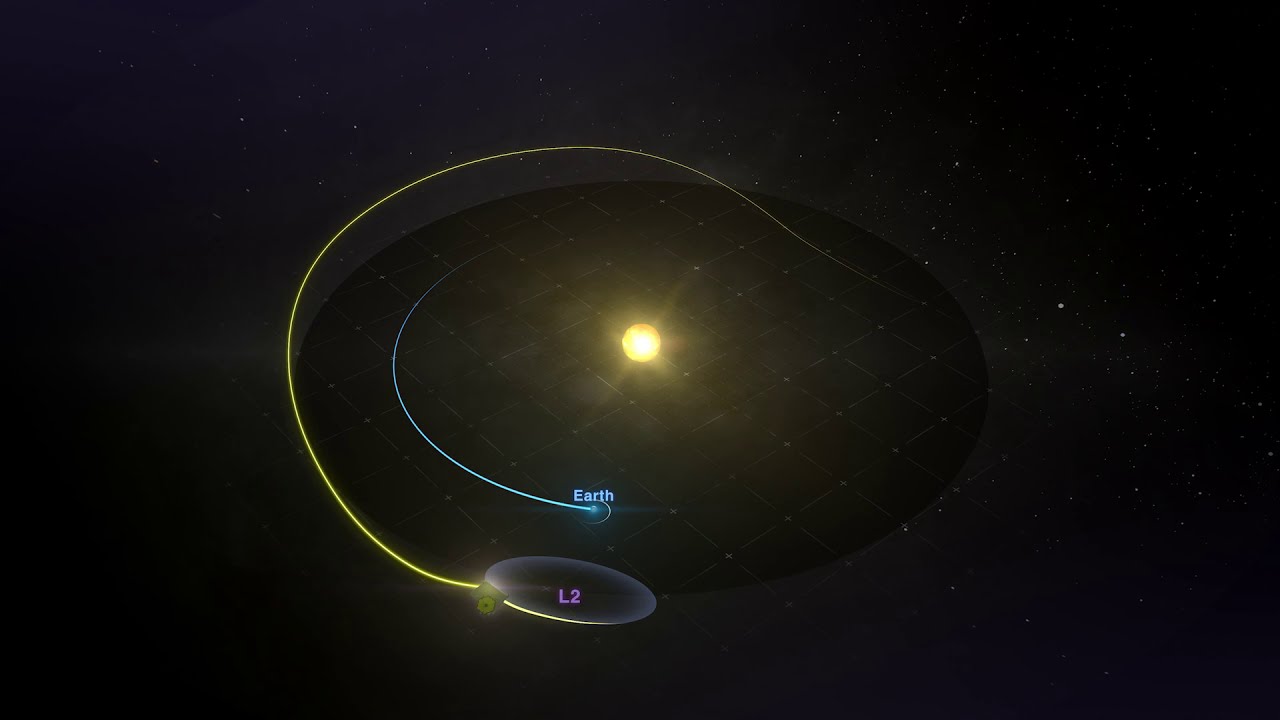
Durante su camino hacia el punto de Lagrange L2 del sistema Sol–Tierra el Telescopio Espacial James Webb tiene que sobrevivir a un complejo proceso de despliegue para poder entrar en servicio. Pero su viaje hacia el punto L2 también tiene su...

Success! #NASAWebb’s first mid-course correction burn helped fine-tune Webb's trajectory toward its orbit around the second Lagrange point, a million miles (1.5 million km) from Earth: https://t.co/fCx9tOm7ZI#UnfoldTheUniverse pic.twitter.com/1fb7EGbzE9— NASA Webb Telescope (@NASAWebb) December 26, 2021 El Telescopio Espacial James Webb no sólo...

Despegue del Webb – ESA/CNES/Arianespace La misión del Telescopio Espacial James Webb es contar la historia del universo, desde unos pocos latidos después de su radiante y explosivo nacimiento, pasando por el discurrir de las eras cósmicas, hasta ahora, cuando los humanos...

El Webb en a la plataforma de lanzamiento – ESA - M. Pedoussaut Muchos temimos que este momento no llegara –de hecho estuvo a punto de ser cancelado en 2011– pero por fin el Telescopio Espacial James Webb está en la plataforma...
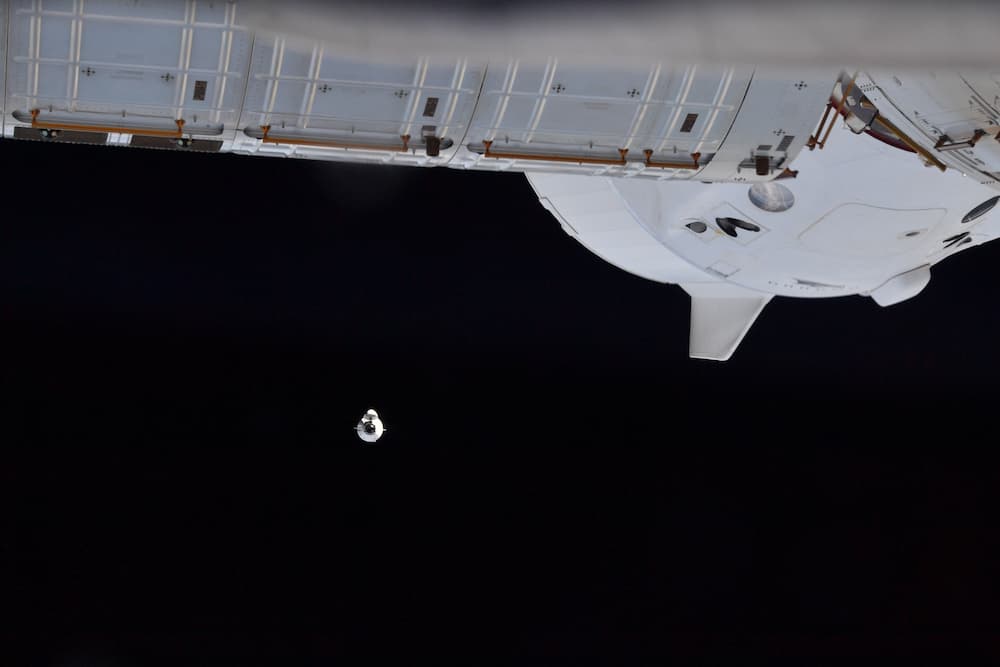
La Dragon 24 en su aproximación a la EEI - Raja Chari/NASA Justo a tiempo para las Navidades la cápsula de carga Dragon 24 ya está en la Estación Espacial Internacional. Atracaba en el puerto superior del módulo Harmony en la mañana...

La buena noticia es que el Telescopio Espacial James Webb pasó con éxito su revisión de preparación para el lanzamiento y todo está listo desde el punto de vista técnico. La mala es que después de sufrir retrasos por múltiples motivos, y...

Con el lanzamiento esta mañana de la cápsula de carga Dragon 24 hacia la Estación Espacial Internacional (EEI) SpaceX ha cerrado 2021 con un nuevo récord de lanzamientos para un total de 31. Llega así a la cifra que estaba prevista...

El pasado mes de abril la Parker Solar Probe (PSP) de la NASA se convirtió en la primera sonda espacial de la historia en meterse en la atmósfera del Sol. Este vídeo recién publicado recoge cómo el instrumento WISPR (Wide-field Imager...

pic.twitter.com/3OiFxMepTL— РОГОЗИН (@Rogozin) December 20, 2021 Un aterrizaje en las estepas de Kazajistán en la madrugada del 20 de diciembre de 2021 ponía fin a la misión de la cápsula tripulada Soyuz MS-20. Que básicamente consistió en un viaje de turismo espacial...

Si no me fallan las búsquedas la primera vez que mencioné el futuro lanzamiento del telescopio espacial James Webb en el blog fue en febrero de 2004. Entonces se hablaba de 2011 ó 2012. No sé cuántas veces he ido sacando...

Hace unos minutos un cohete Falcon 9 de SpaceX ha puesto en órbita un nuevo lote de 52 satélites Starlink para acceso a Internet. Pero la noticia es que la primera etapa del cohete ha aterrizado sin problemas en el espaciopuerto...

El Flyer I en el aire El 17 de diciembre de 1903 el Wright Flyer de los hermanos Wright, también conocido como Flyer I, hacía su primer vuelo. Duró 12 segundos y cubrió una distancia de 37 metros. Generalmente –a menos que...
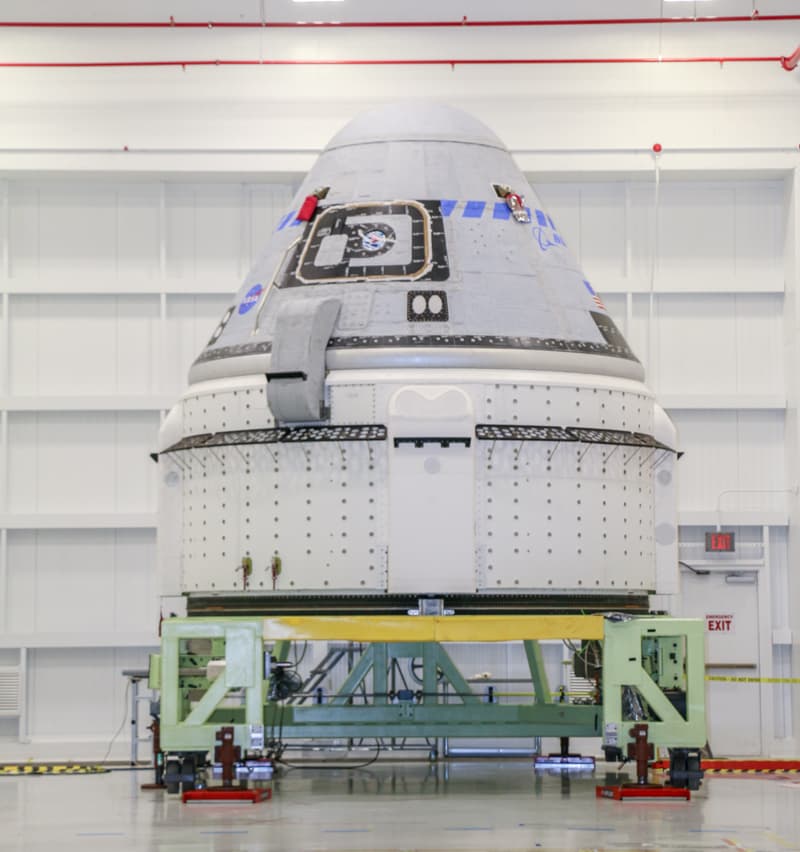
Una Starliner sobre su módulo de servicio – Boeing En Boeing siguen sin saber qué hizo que se atascaran las válvulas del sistema de maniobra del módulo de servicio de la Starliner que iba a hacer la segunda misión de demostración de...
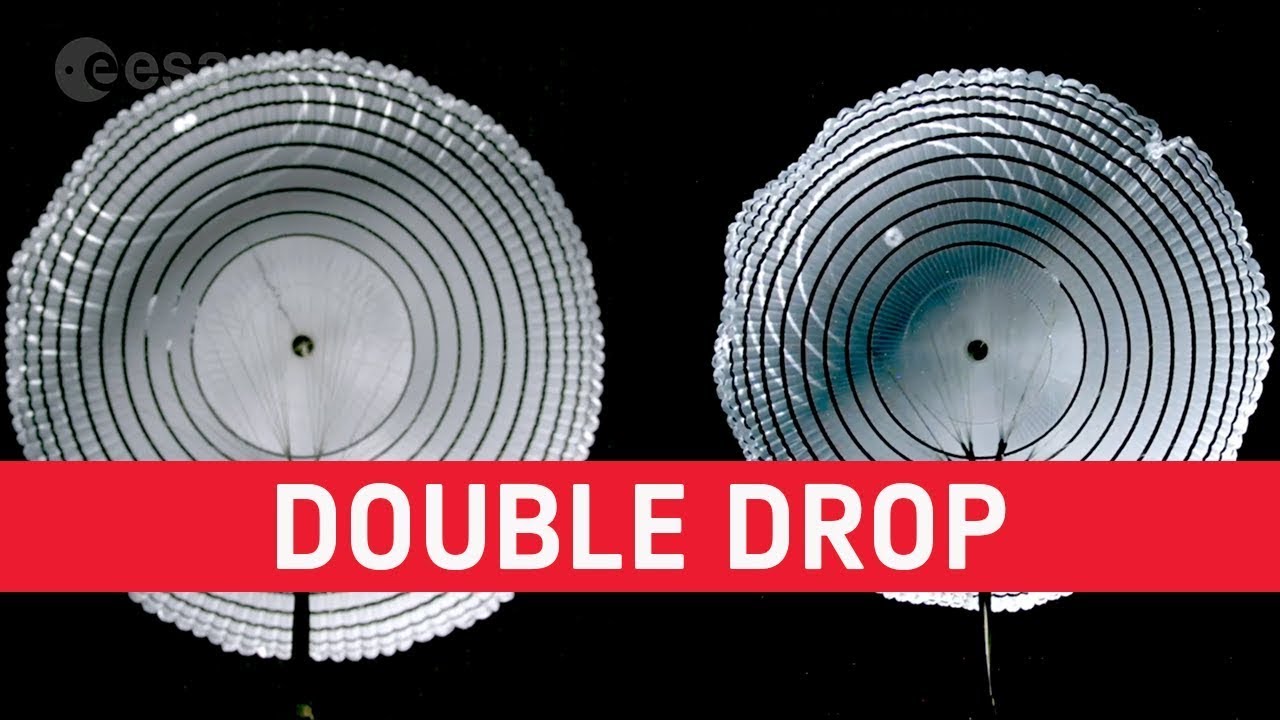
Uno de los motivos que obligó a cancelar el lanzamiento del rover Rosalind Franklin hacia Marte en 2020 fue que los paracaídas no estaban listos y que entre unas cosas y otras –entre ellas la pandemia de covid– no había tiempo...

Desde hoy mismo está disponible el primer capítulo de Universo Curioso, el primer podcast en español de la NASA. Es un capítulo dedicado al cada vez más próximo lanzamiento del Telescopio Espacial James Webb, ahora mismo previsto para no antes del...
La S.S. Ellison Onizuka a su partida de la EEI – Matthias Maurer/ESA Una reentrada controlada en la atmósfera sobre el Pacífico en la mañana del 15 de diciembre de 2021 puso fin a la misión de la cápsula de carga Cygnus...
La NASA acaba de confirmar que los datos recogidos por la la Parker Solar Probe (PSP) en su octava aproximación al Sol indican que el 28 de abril de 2021 la sonda cruzó el límite entre el espacio y la atmósfera...
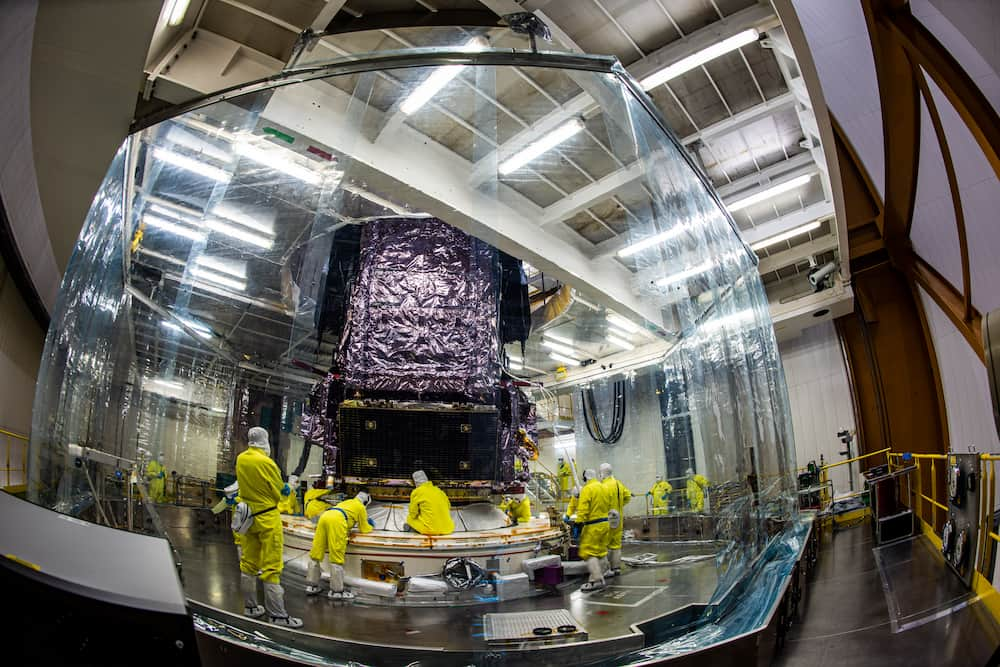
El Webb durante su acoplamiento al Ariane 5 que lo va a lanzar – ESA-M.Pedoussaut Después de tantos años de retrasos que el telescopio espacial James Webb esté en la recta final de su procesado para el lanzamiento es casi un milagro....
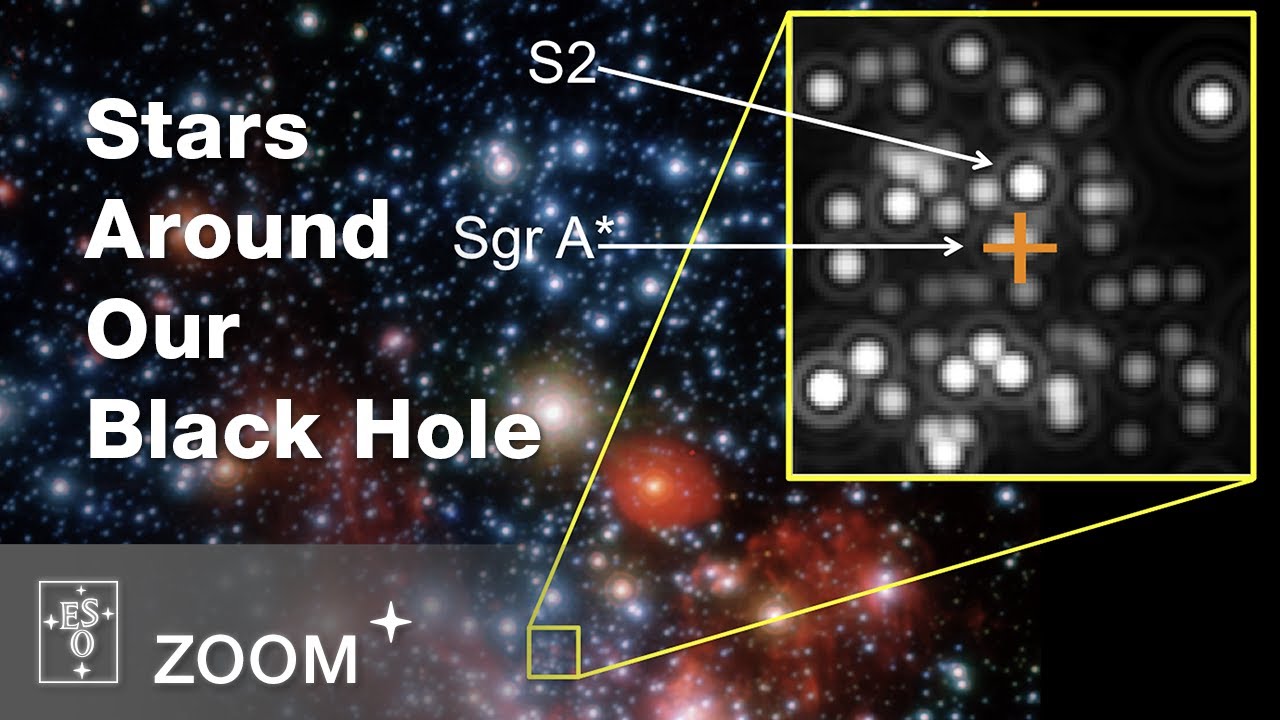
Este espectacular vídeo es un auténtico zoom a escala galáctica que nos lleva desde las estrellas que vemos en el firmamento a lo más profundo del centro de la Vía Láctea y al agujero negro que sabemos que hay allí¹, también...

El 11 de diciembre de 2021 Blue Origin lanzó su tercera misión tripulada. En ella, a diferencia de las dos anteriores, iban seis personas a bordo. La altitud máxima alcanzada por la cápsula fue de 107 kilómetros, lo que la pone...
El 10 de diciembre de 2021 un cohete Larga Marcha 4B ponía en órbita los satélites Shi Jian 6I y 6J. Fue el lanzamiento número 400 para la familia de cohetes Larga Marcha, que entró en servicio el 24 de abril...

Anna Kikina entrenándose en una Soyuz – Roscosmos En el verano de 2020 Dmitri Rogozin, el director de Roscosmos, la agencia espacial rusa, anunciaba que Anna Kikina iba a volar a la Estación Espacial Internacional (EEI) en 2022. En principio iba a...
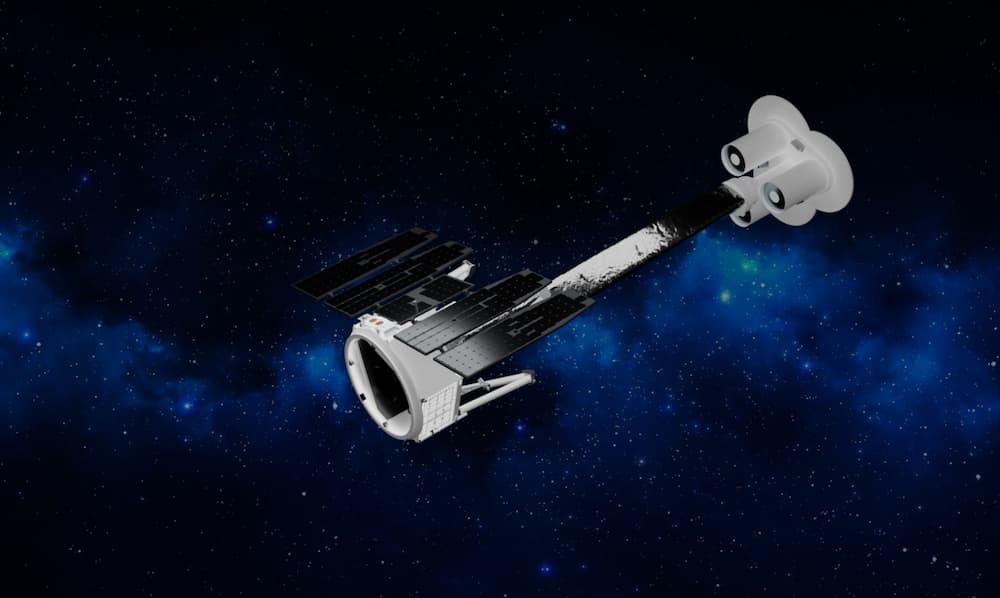
Deployment of IXPE confirmed pic.twitter.com/Gqx52tUf2O— SpaceX (@SpaceX) December 9, 2021 Esta mañana un Falcon 9 de SpaceX ha lanzado el observatorio espacial de rayos X IXPE para la NASA. El observatorio está en su órbita y ahora toca el periodo de puesta...
The Soyuz MS-20 trio docked to the station’s Poisk module today at 8:40am ET. https://t.co/LuvfBeme7f pic.twitter.com/3HLyFlgQ5R— International Space Station (@Space_Station) December 8, 2021 El multimillonario japonés Yusaku Maezawa acaba de llegar a la Estación Espacial Internacional (EEI) en la Soyuz MS-20 para...

Crew-3 on orbit pic.twitter.com/VFP1fXwlfZ— SpaceX (@SpaceX) November 11, 2021 El pasado mes de octubre la NASA lanzó una petición para recibir ofertas para lanzamientos tripulados a la Estación Espacial Internacional. Sorprendentemente¹, tras analizar las propuestas, la agencia ha llegado a la conclusión...
Foto de grupo de los candidatos a astronauta de 2021. De izquierda a derecha en la fila de atrás Ayers, Delaney, Menon, Berrios, Birch, Douglas; en la de delante Williams, Wittner, Hathaway y Burnham – NASA Poniendo fin a un proceso iniciado...

De izquierda a derecha las propuestas de Blue Origin (Orbital Reef), Nanoracks (Starlab) y Northrop Grumman – NASA Uno de los objetivos de la NASA en los últimos años está siendo el de promover el uso comercial el espacio, sobre todo el...

Aunque no hay grandes diferencias en cuanto a las capacidades que ya habían anunciado en marzo de 2021 ayer Peter Beck, el director de Rocket Lab, dio algunos detalles más acerca de su cohete reutilizable Neutrón, algunos de ellos muy jugosos....

Esta pasada noche un cohete Falcon 9 de SpaceX ponía en órbita 48 satélites Starlink de su constelación de acceso a Internet y dos satélites de observación terrestre de BlackSky. Tanto los Starlink como los BlackSky están en su órbita inicial...
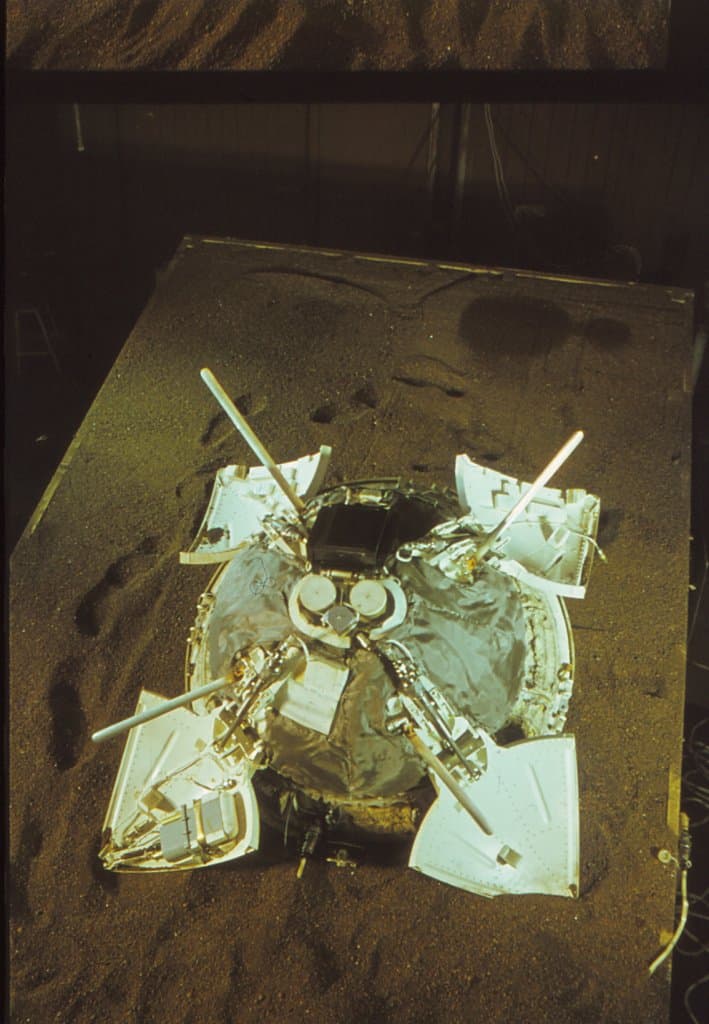
Modelo de los aterrizadores de la misión – Roscosmos El 2 de diciembre de 1971 el módulo de aterrizaje de la sonda soviética Mars 3 conseguía posarse de una pieza sobre la superficie de Marte. Se convertía así en la primera en...

El 26 de julio de 2021 la cápsula de carga Progress MS-16 terminaba su misión desintegrándose sobre una remota zona del Pacífico mediante una reentrada controlada en la atmósfera. Es el final de todas las cápsulas Progress, que en su interior...
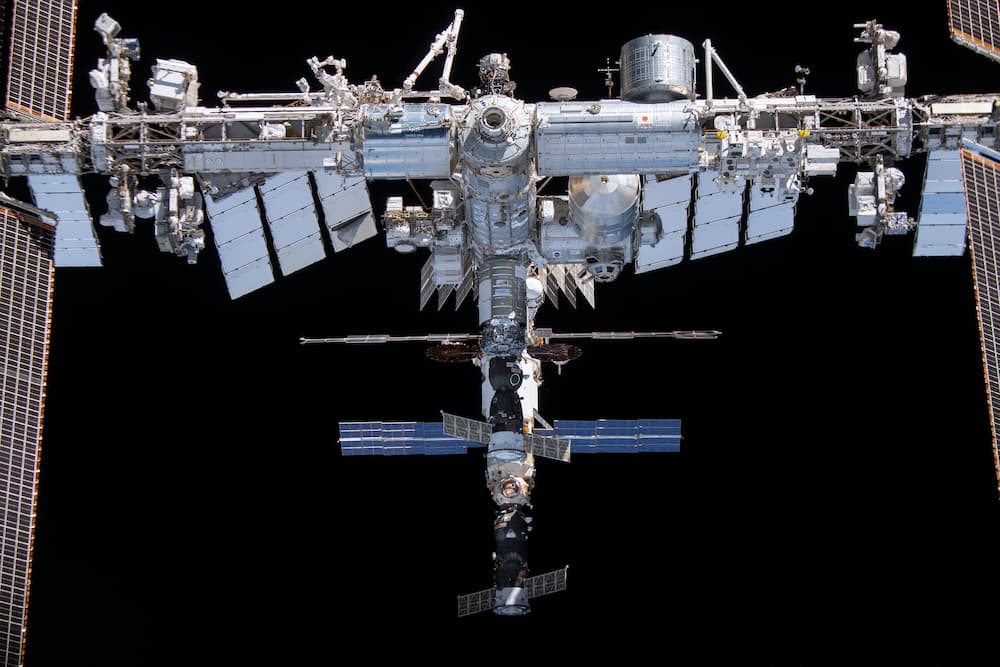
La Estación Espacial Internacional con su nuevo módulo Nauka y la Progress MS-17 abajo de todo en la foto – NASA Estaba previsto que Kayla Barron y Thomas Marshburn hubieran llevado a cabo hoy un paseo espacial para cambiar una antena estropeada...
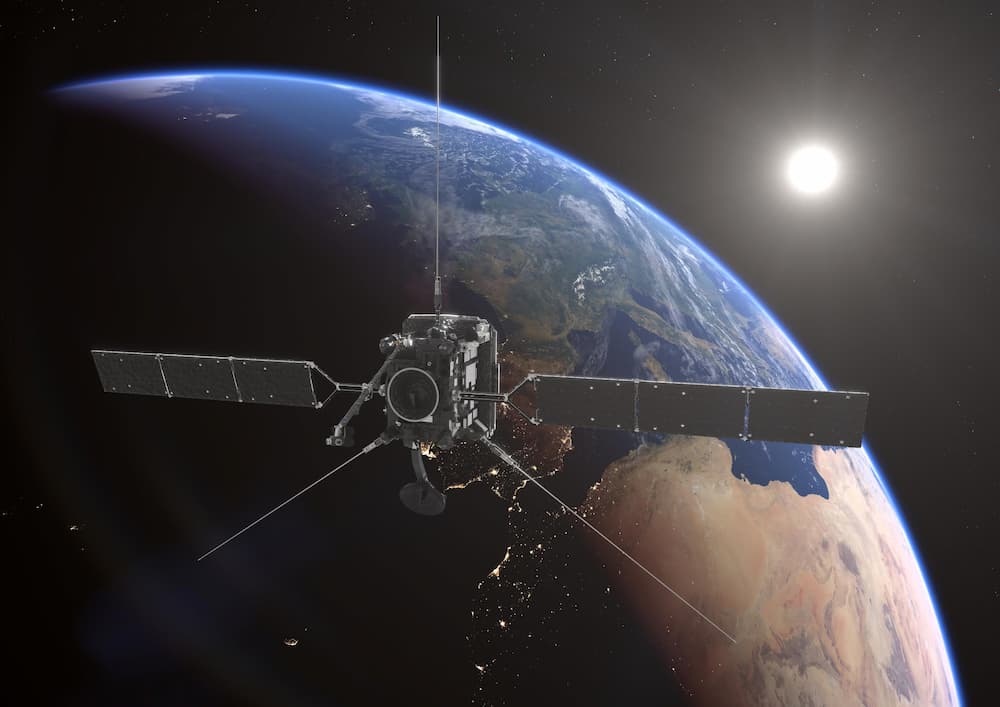
Esta pasada noche la Solar Orbiter de la Agencia Espacial Europea sobrevolaba la Tierra de camino al Sol, llegando a pasar a tan sólo 460 kilómetros de altitud sobre el norte de África y las Canarias. Es la tercera maniobra de...

Prichal, aún unido a la Progresss M-UM que le hizo de transporte, atracado al módulo Nauka de la EEI; en primer plano la Soyuz MS-19 – Roscosmos Tal y como estaba previsto la cápsula Progress M-UM que llevaba consigo el módulo Prichal...

The Progress MS-17 cargo vehicle with an unusual cargo has undocked from the Nauka module of the International Space Station Russian segment! https://t.co/tQKFXIRf5D— Oleg Artemyev (@OlegMKS) November 25, 2021 Un encendido de sus motores a las 15:34, hora peninsular española (UTC +1)...

El Webb durante los preparativos para el lanzamiento en el espaciopuerto de Kourou – ESA Una gran noticia por parte del blog del Telescopio Espacial James Webb. Según se puede leer en Testing Confirms Webb Telescope on Track for Targeted Dec. 22...

The #Prichal Node Module is a spherical pressurized compartment with mission-supporting component parts placed inside and outside.The interior of the spherical hull is divided into two zones - instrument and habitable. pic.twitter.com/TQDn4I8Xg0— РОСКОСМОС (@roscosmos) November 24, 2021 Un cohete Soyuz-2.1b despegaba a...
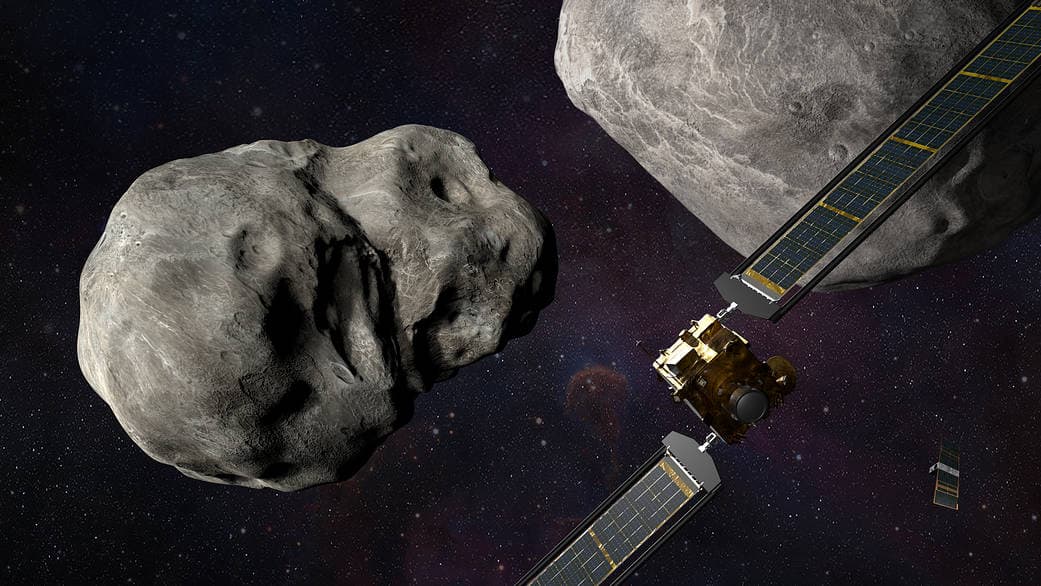
Hace unas horas un cohete Falcon 9 de SpaceX lanzaba la misión DART (Double Asteroid Redirection Test, prueba de redirección de un asteroide doble) rumbo al asteroide Dimorphos, que es la luna del asteroide Didymos. El objetivo es chocar contra él...

Blue Origin acaba de anunciar que Laura Shepard Churchley, la hija mayor de Alan Shepard, volará como invitada en el próximo lanzamiento de un New Shepard. Alan Shepard fue el primer astronauta estadounidense en salir al espacio el 5 de mayo de...

El Webb durante los preparativos para el lanzamiento en el espaciopuerto de Kourou – ESA/CNES/Arianespace/P. Piron Un accidente en el procesado del telescopio espacial James Webb en el que se soltó inesperadamente una cinta de sujección mientras lo iban a fijar en...
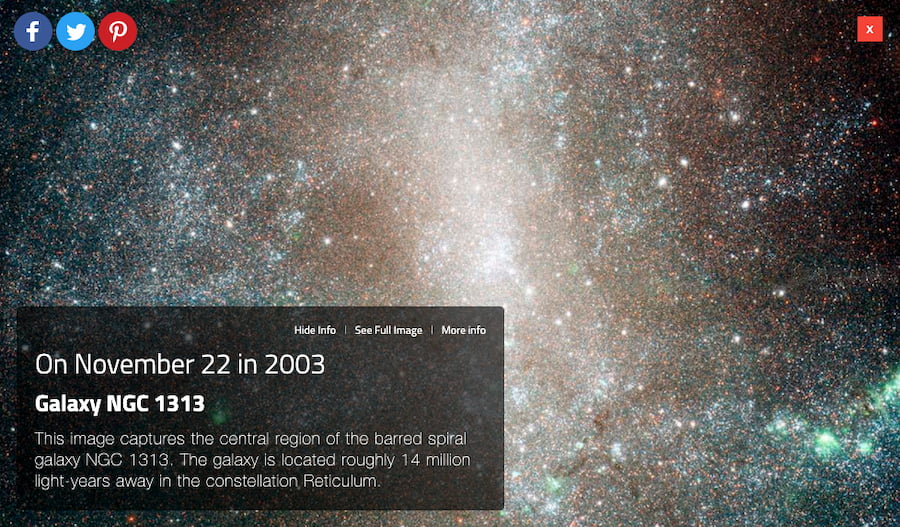
En la NASA tienen esta curiosa página que te dice Qué imagen vió el telescopio espacial Hubble el día de tu cumpleaños. Y es que como lleva más de 30 años en activo ha sido posible rellenar el calendario con 365...

En el caso del Rocket 3.3 de Astra no se cumplió aquello de que a la tercera va la vencida a causa de una fuga de propelentes. Pero al cuarto intento la empresa por fin ha conseguido poner en órbita uno...

Kayla Barron abriendo la escotilla del laboratorio Columbus – Matthias Maurer/ESA A primera hora de este pasado lunes la tripulación de la Estación Espacial Internacional (EEI) fue despertada por el control de la misión antes de lo previsto –allí usan el horario...

La Estación Espacial Internacional vista desde la Soyuz MS-18 en septiembre de 2021 – Oleg Novitskiy/Roscosmos La semana pasada la Estación Espacial Internacional (EEI) llevó a cabo una maniobra de modificación de su órbita para apartarse de la trayectoria de un fragmento...

#OTD in 1971, Mariner 9 became the 1st spacecraft to orbit another planet! The little orbiter observed a great dust storm that obscured the whole globe of the planet upon arrival, so it settled in to wait until the dust settled and...

Tal y como estaba previsto la Crew Dragon Endurance atracó esta pasada noche de forma automática en el puerto frontal del módulo Harmony de la Estación Espacial Internacional (EEI). Esto completaba la primera fase de su primera misión. A bordo iban...

Despegue de la Endurance desde la tribuna de invitados del Centro Espacial Kennedy – NASA/Joel Kowsky Esta pasada noche un Falcon 9 de SpaceX ponía en órbita la Crew Dragon Endurance con la tripulación Crew–3 a bordo rumbo a la Estación Espacial...
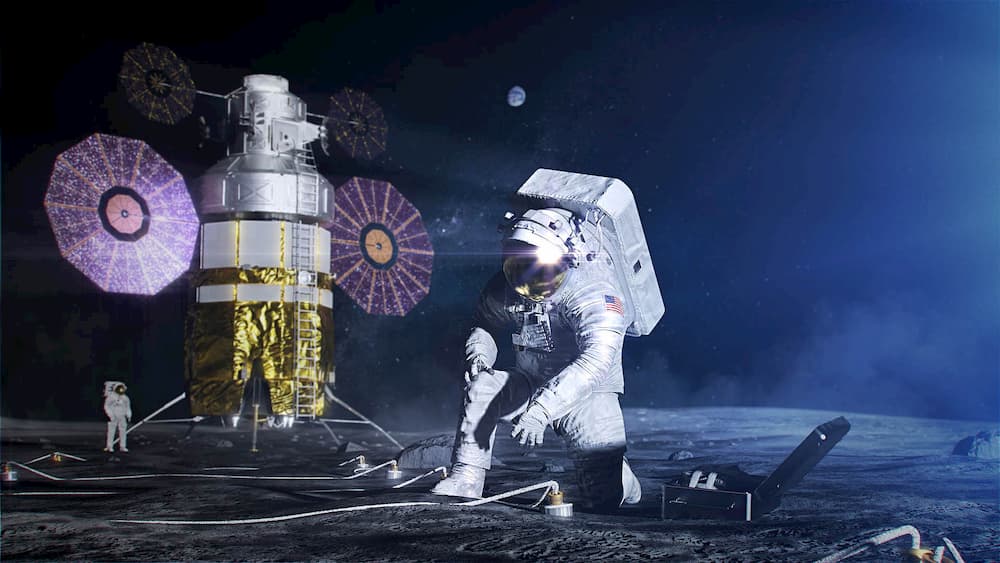
Impresión artística de un astronauta de la NASA en la Luna en una misión Artemisa - NASA Sorprendiendo aproximadamente a nadie –en esta casa dijimos desde un primer momento que era imposible– la NASA reconocía ayer que no lanzarán una misión tripulada...
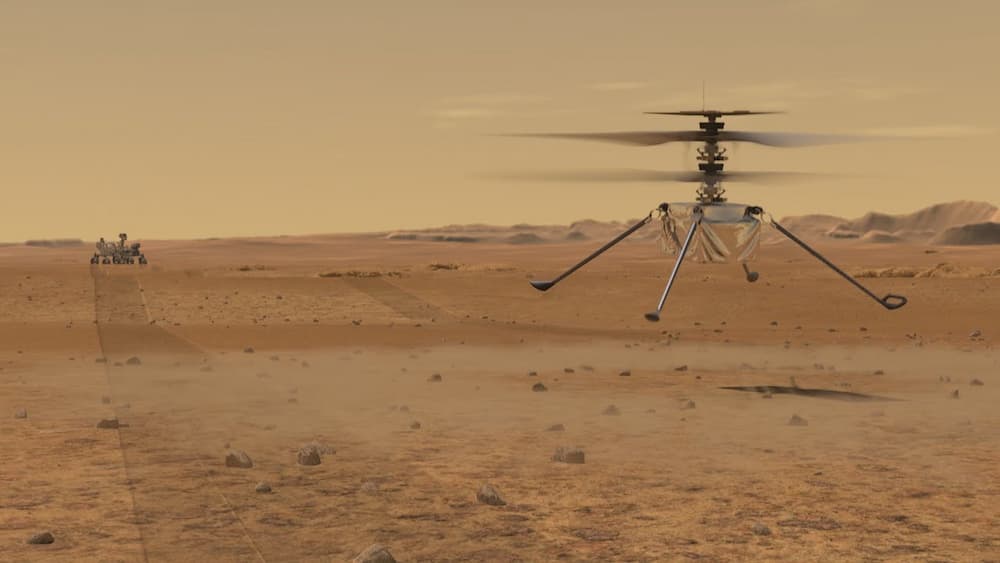
Como en todos los vuelos anteriores Ingenuity ha fotografiado su sombra durante su decimoquinto vuelo – NASA JPL Ingenuity, el pequeño helicóptero que acompaña al rover Perseverance de la NASA en Marte, acaba de llevar a cabo su decimoquinto vuelo. Ha sido...

Despliegue del Hubble desde la bodega del Discovery el 25 de abril de 1990– NASA El 25 de octubre de 2021 los instrumentos del telescopio espacial Hubble entraron en modo seguro –dejaron de funcionar– debido a un problema con la señal de...
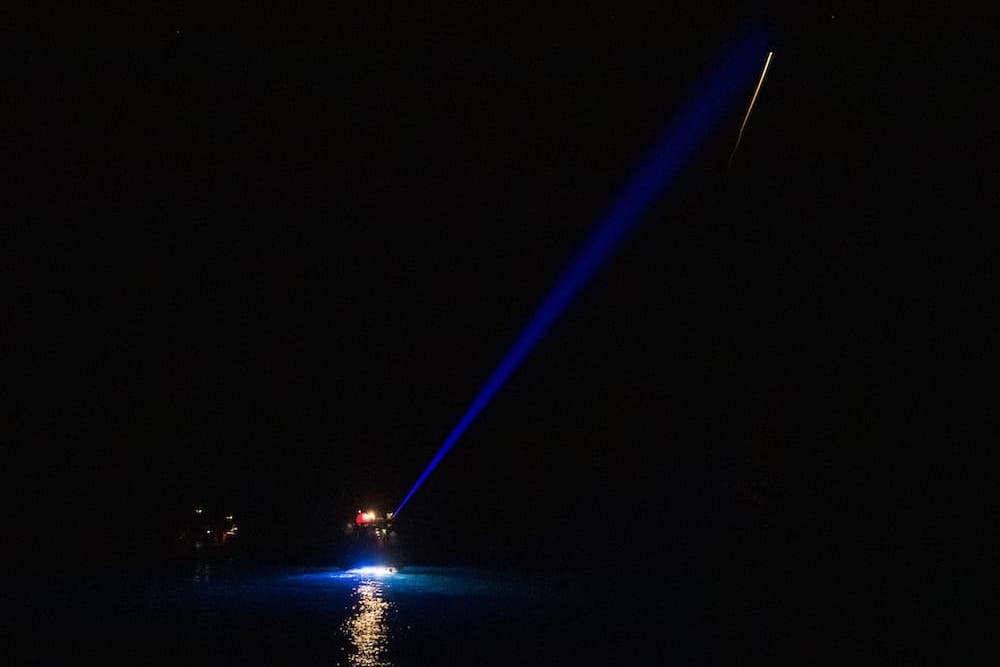
La Endeavour a su partida de la EEI – NASA Esta pasada noche la cápsula tripulada Crew Dragon Endurance amerizaba en el Golfo de México poniendo fin a la misión Crew–2 de SpaceX. A bordo venían Shane Kimbrough y Megan McArthur de...

El pasado 27 de octubre de 2021 un cohete Kuaizhou-1A ponía en órbita el satélite de observación terrestre Jilin-1 Gaofen-02F. Fue el lanzamiento número 40 del año desde China, lo que establece un nuevo récord para el país, superando los 39...

Hoy ha tenido lugar el tercer paseo espacial en el exterior de la estación espacial china. En él participó Wang Yaping, que se convertía así en la primera astronauta china en hacer un paseo espacial. La acompañaba en el paseo Zhai...
La Crew Dragon Endeavour llegando a la Estación Espacial Internacional con la tripulación Crew–2 – Megan McArthur/NASA Normalmente el relevo de tripulaciones en la Estación Espacial Internacional (EEI) se hace de tal forma que la entrante coincide unos días con la saliente....

El Miura 1 y su remolque rampa de lanzamiento – PLD Space PLD Space ha anunciado que exhibirá su cohete Miura 1 en público en Madrid durante los días 12, 13 y 14 de noviembre. Estará frente al Museo Nacional de Ciencias...

Uno de los tacos espaciales flotando en caída libre – Megan McArthur/NASA Uno de los problemas con los que se enfrentarán futuras, aunque por ahora hipotéticas, misiones espaciales tripuladas más allá de la órbita terrestre o de la Luna es el de...
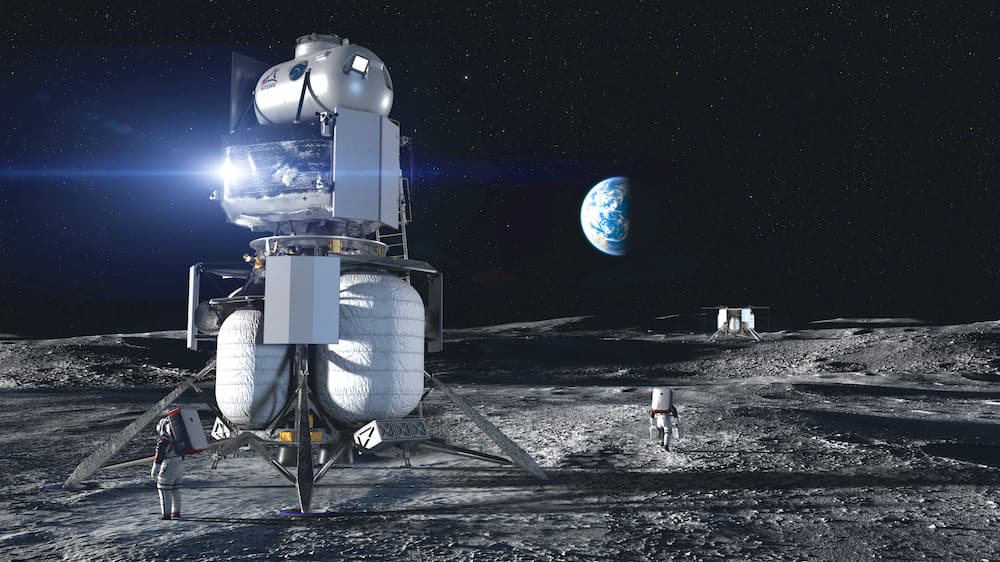
Impresión artística del Integrated Lander Vehicle de National Team, el grupo de empresas que lideraba Blue Origin, sobre la Luna – National Team Más o menos todo el mundo –probablemente también en Blue Origin– esteraba este resultado, pero ya es oficial: según...

El Hubble en órbita sobre la Tierra – NASA El pasado 23 de octubre los instrumentos instrumentos del telescopio espacial Hubble entraron en modo seguro al detectar la pérdida de una de las señales de sincronización que usan para saber la hora...
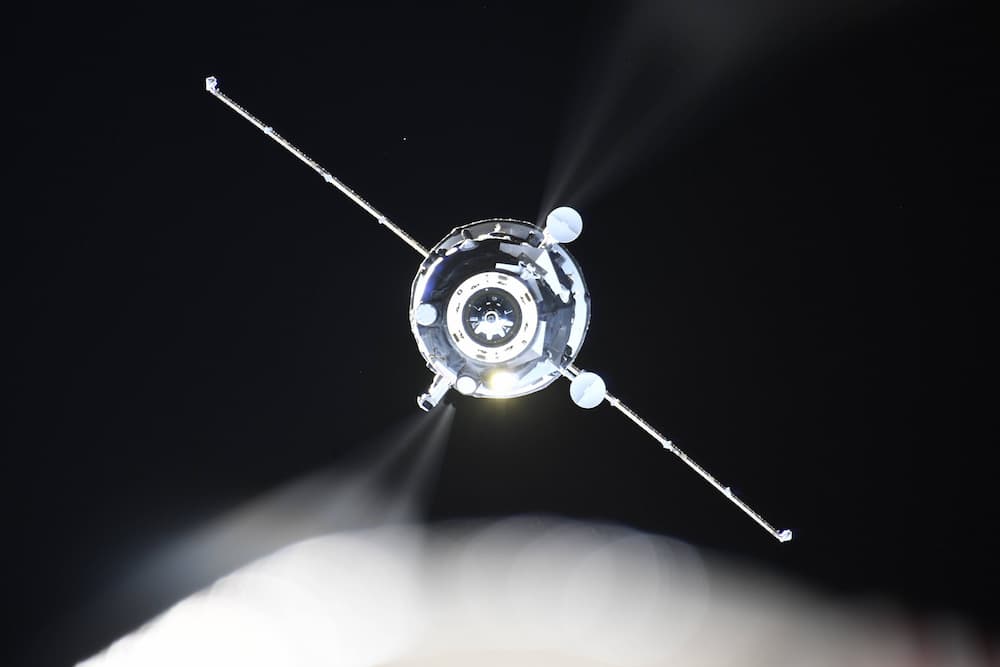
La Progress MS-18 maniobrando a su llegada a la EEI – Anton Shkaplerov/Roscosmos Después de su lanzamiento en la noche del 28 al 29 de octubre de 2021 la cápsula de carga Progress MS-18 ya está en la Estación Espacial Internacional. Se...

A principios de 2020 Space Adventures anunciaba un acuerdo con SpaceX para hacer un lanzamiento dedicado al turismo espacial a bordo de una Crew Dragon. La idea era que hasta cuatro personas estuvieran unos días en órbita, a una altitud mayor...
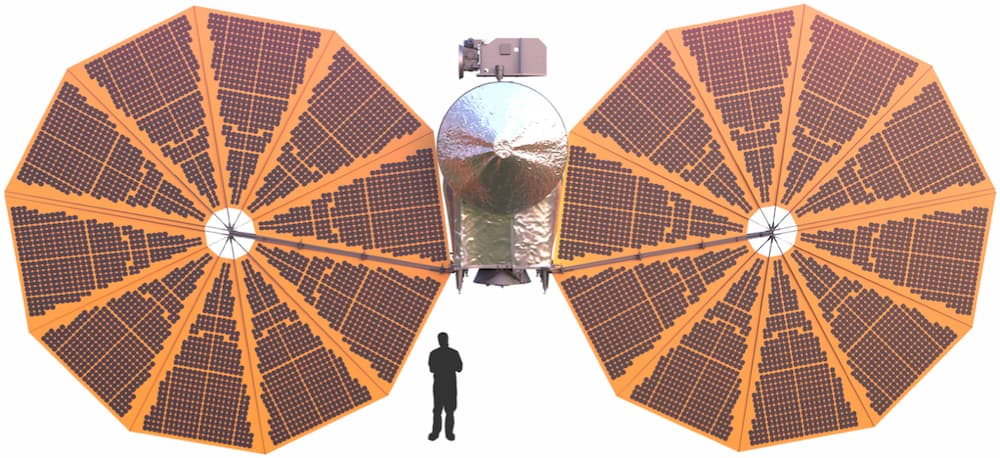
Esquema de Lucy con los paneles solares y la plataforma de instrumentos, en la parte superior de la sonda, encima de la antena, desplegados, con una persona para dar escala – Southwest Research Institute El pasado 16 de octubre de 2021 la...
The Apollo Murders por Chris Hadfield. Quercus (12 octubre 2021). 501 páginas. En abril de 1973 la NASA está ultimando los preparativos para lanzar la misión Apolo 18. Su objetivo es aterrizar cerca del Lunojod 2 y ver qué es lo que...

La Crew Dragon Resilience atracada en la Estación Espacial Internacional – NASA Dmitry Rogozin, el máximo responsable de Roscosmos, acaba de anunciar durante el 72 Congreso Internacional de Astronáutica que por fin están dispuestos a que algún cosmonauta vuele en la Crew...
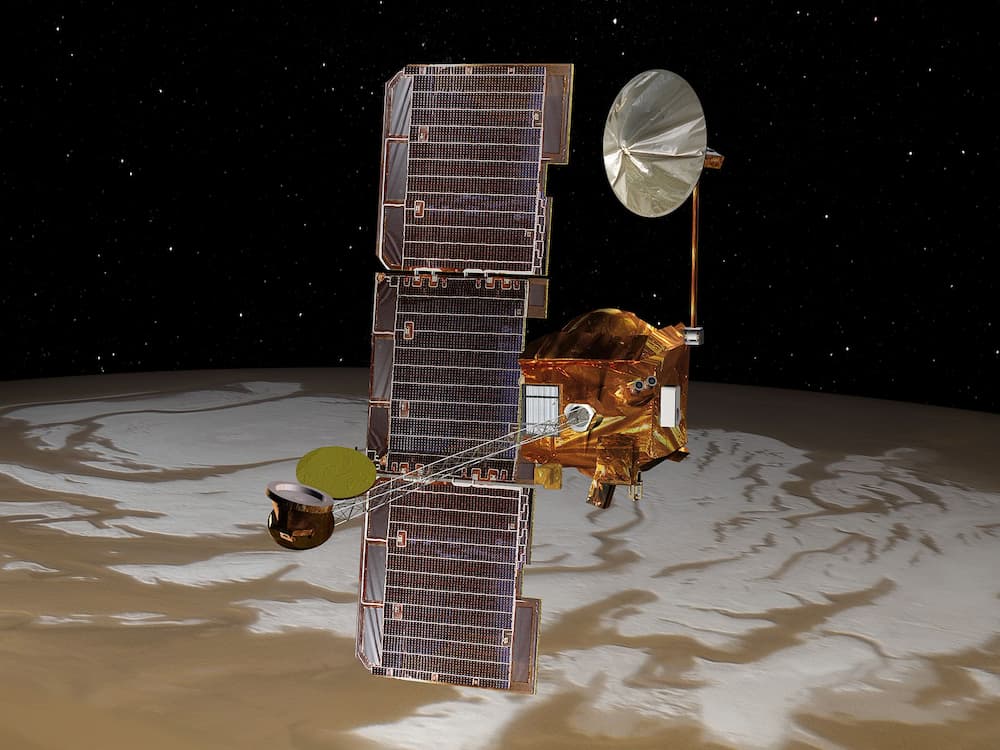
Impresión artística de la Mars Odyssey en órbita alrededor de Marte – NSA/JPL El 24 de octubre de 2001 la sonda Mars Odyssey de la NASA entraba en órbita alrededor de Marte para una misión con una duración prevista de 32 meses....

La Estación Espacial Internacional tiene fecha de caducidad a finales de esta década – Oleg Novitskyi/Roscosmos Hace unas semanas la NASA pidió propuestas para estaciones espaciales privadas que puedan sustituir a la Estación Espacial Internacional cuando haya que retirarla. Estos días han...

En la noche del 23 al 24 de octubre de 2021 un cohete Arian3 5 despegaba del puerto espacial de Kourou en la Guayana Francesa. Llevaba a bordo dos cargas, los satélites de telecomunicaciones SES-17 y Syracuse 4A. Con una masa...
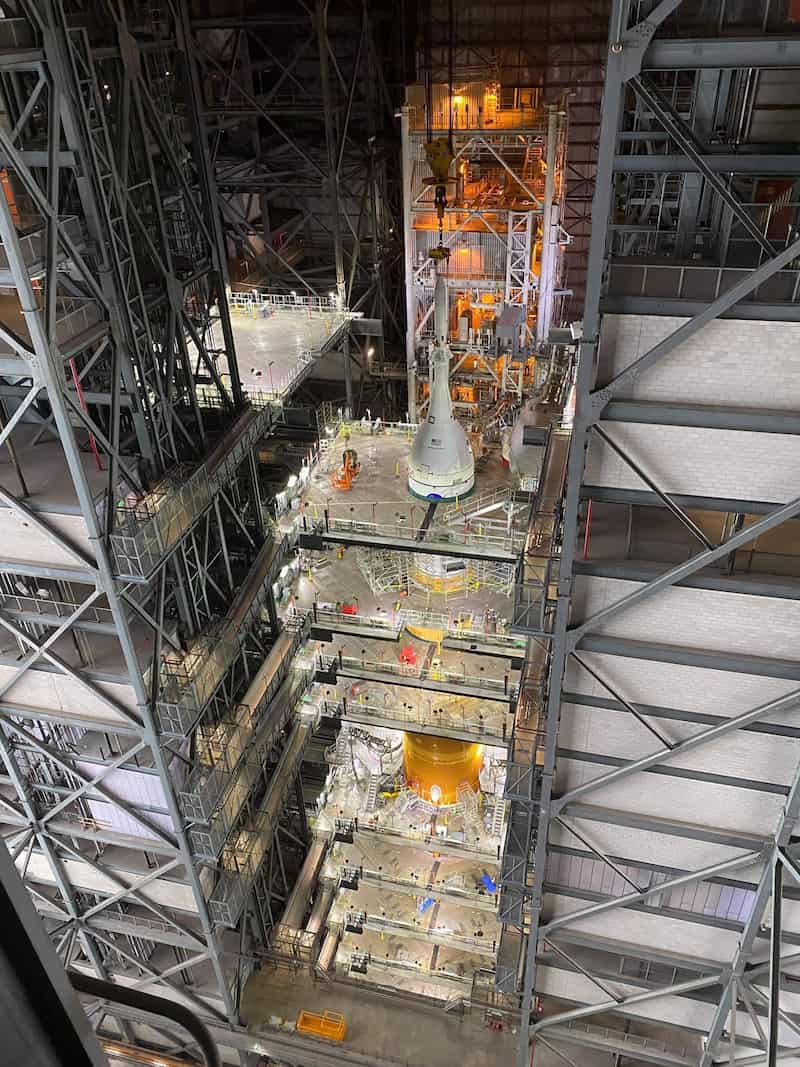
Con unos cinco años de retraso –su primer vuelo estaba planeado originalmente para 2016– la NASA tiene por fin montado un cohete SLS completo con una cápsula Orión como carga útil. Será el que lance la misión Artemisa I. Es un...
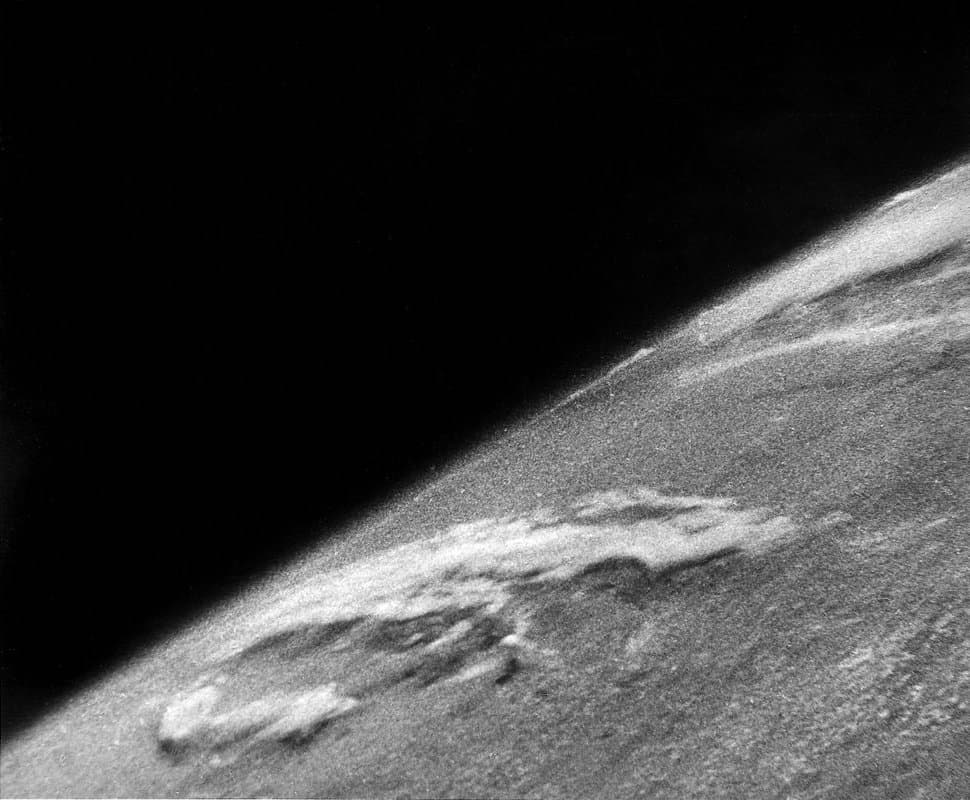
La Tierra vista desde el espacio por primera vez – White Sands Missile Range/Applied Physics Laboratory El 24 de octubre de 1946 un cohete V2 capturado por las Fuerzas Armadas de los Estados Unidos al terminar la Segunda Guerra Mundial despega del...

No es lo que haces cuando estás en el espacio sino con quién lo haces.– Chris Cassidy Entre las estrellas (Among the Stars), disponible en Disney+, cuenta la historia de la última misión del astronauta de la NASA Chris Cassidy, quien...
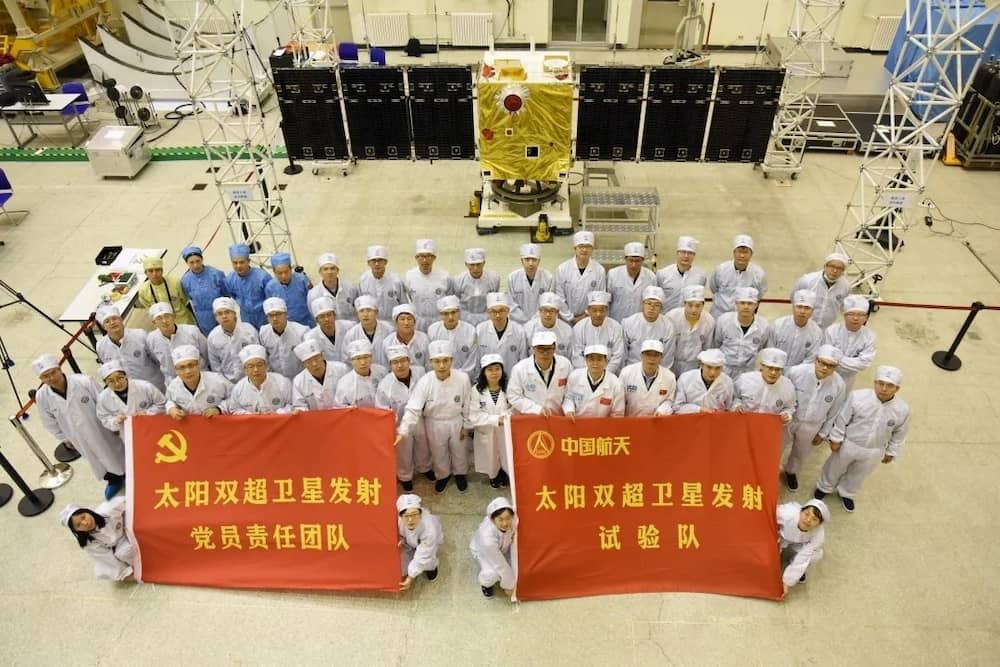
CHASE antes de ser preparado para el lanzamiento – Corporación de Ciencia y Tecnología Aeroespacial de China El pasado 14 de octubre de 2021 China lanzaba el observatorio solar CHASE/Xihe, su primer observatorio solar. CHASE viene de Chinese Hydrogen Alpha Solar Explorer,...

Virgin Galactic ya había dicho hace algún tiempo que iban a parar el VMS Eve, su avión nodriza, para someterlo a una profunda y muy necesaria revisión. Y ya es oficial: tanto el VM Eve como el VSS Unity, el avión...
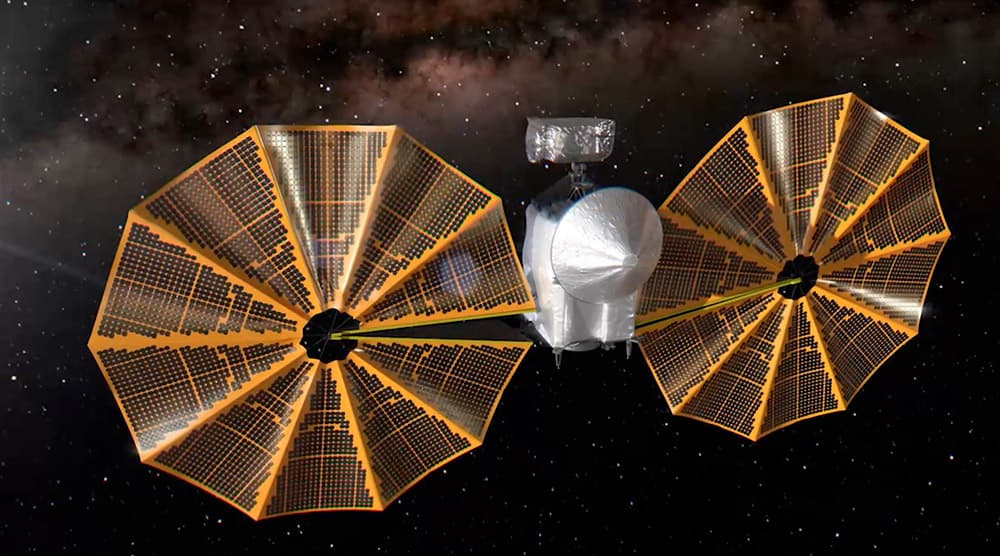
Impresión artística de Lucy con los paneles solares desplegados – Southwest Research Institute Todavía no hay muchos detalles pero según se puede leer en el blog de la misión uno de los dos paneles solares de Lucy no se ha bloqueado después...

En la mañana del 14 de octubre de 2021 un cohete Soyuz-2.1b con una etapa superior Fregat-M lanzado desde el cosmódromo de Vostochni ponía en órbita el decimoprimer lote de satélites para acceso a Internet de OneWeb, formado por 36 unidades....

En la mañana del 17 de octubre de 2021 la actriz Yulia Peresild y el director Klim Shipenko volvieron a tierra a bordo de la cápsula tripulada Soyuz MS-18 después de haber pasado 12 días rodando escenas para la película El...
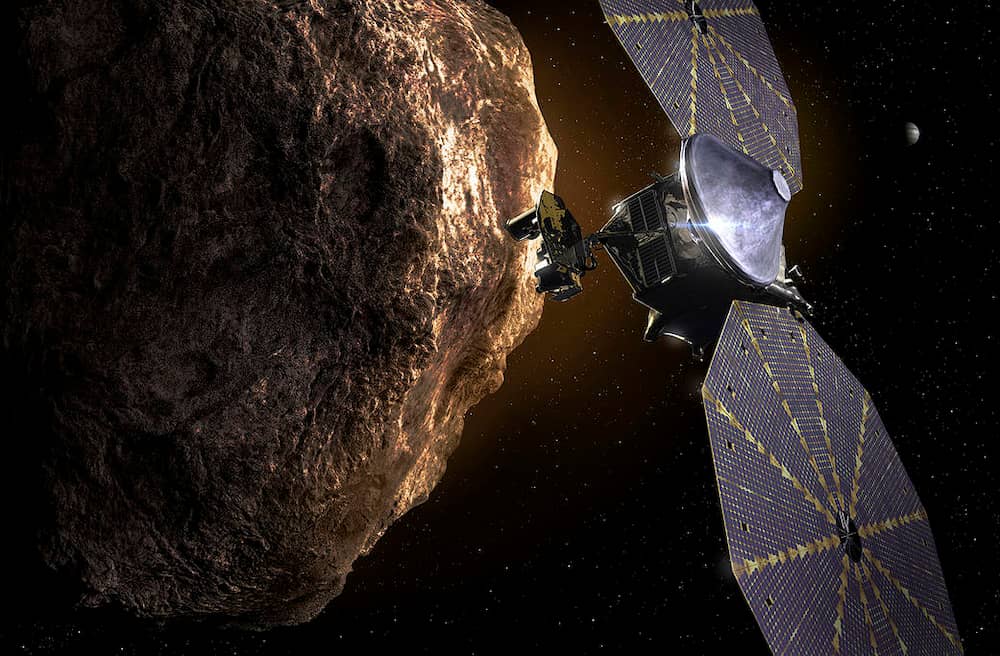
Impresión artística de Lucy sobrevolando un asteroide troyano – Southwest Research Institute Hace unas horas un cohete Atlas 5 lanzaba la sonda Lucy de la NASA en un camino que durará doce años en el que visitará seis asteroides troyanos de Júpiter...

Desde hace unas horas los astronautas Zhai Zhigang, Wang Yaping y Ye Guangfu están a bordo de la estación espacial china tras su lanzamiento a bordo de la cápsula tripulada Shenzhou 13. Serán la primera tripulación que pase seis meses a...

La Soyuz MS de Lego de Tom_Brick Tom_Brick tiene en marcha una propuesta en Lego Ideas para una cápsula tripulada Soyuz MS. Se trata de un modelo a escala de los minifig en el que los tres módulos de la cápsula –el...

El Webb a su llegada a Kourou – ESA/CNES/Arienespace/Optique vidéo du CSG Desde hace unas horas el telescopio espacial James Webb está en las instalaciones del Espaciopuerto de Kourou en la Guayana Francesa desde el que, si todo va bien será lanzado...

Lo que me habéis dado es la experiencia más profunda que puedo imaginar. Estoy tan emocionado por lo que acaba de suceder. Simplemente extraordinario. Espero no recuperarme nunca de esto. Espero poder conservar lo que siento ahora, no quiero perderlo.– William...
Encontré este vídeo de Starlight Hunter a través de una recomendación de Víctor Ruiz en Twitter, lo cual para mi es garantía suficiente de calidad. Aunque tengo algunos conocimientos, no me considero aficionado a la astrofografía, pero el invento me ha...

Пропустили сегодняшний пуск? Мы подготовили для вас повтор этого исторического события!Missed today's launch? We have a replay of this historic event for you! pic.twitter.com/XiVqjG0FVl— РОСКОСМОС (@roscosmos) October 5, 2021 La actriz Yulia Peresild y el director Klim Shipenko llegaban a la Estación...
Blue Origin acaba de hacer públicos los nombres de quienes irán a bordo de su cápsula RSS First Step en su proximo lanzamiento tripulado. Serán Audrey Powers, vicepresidenta de operaciones de vuelo de la empresa; Chris Boshuizen, antiguo ingeniero de la NASA...

El JWST en configuración de lanzamiento en la sala limpia de Northrop Grumman en California – Northrop Grumman A la chita callando el telescopio espacial James Webb (JWST) ha iniciado su camino hacia el espaciopuerto de Kourou en la Guayana Francesa para...
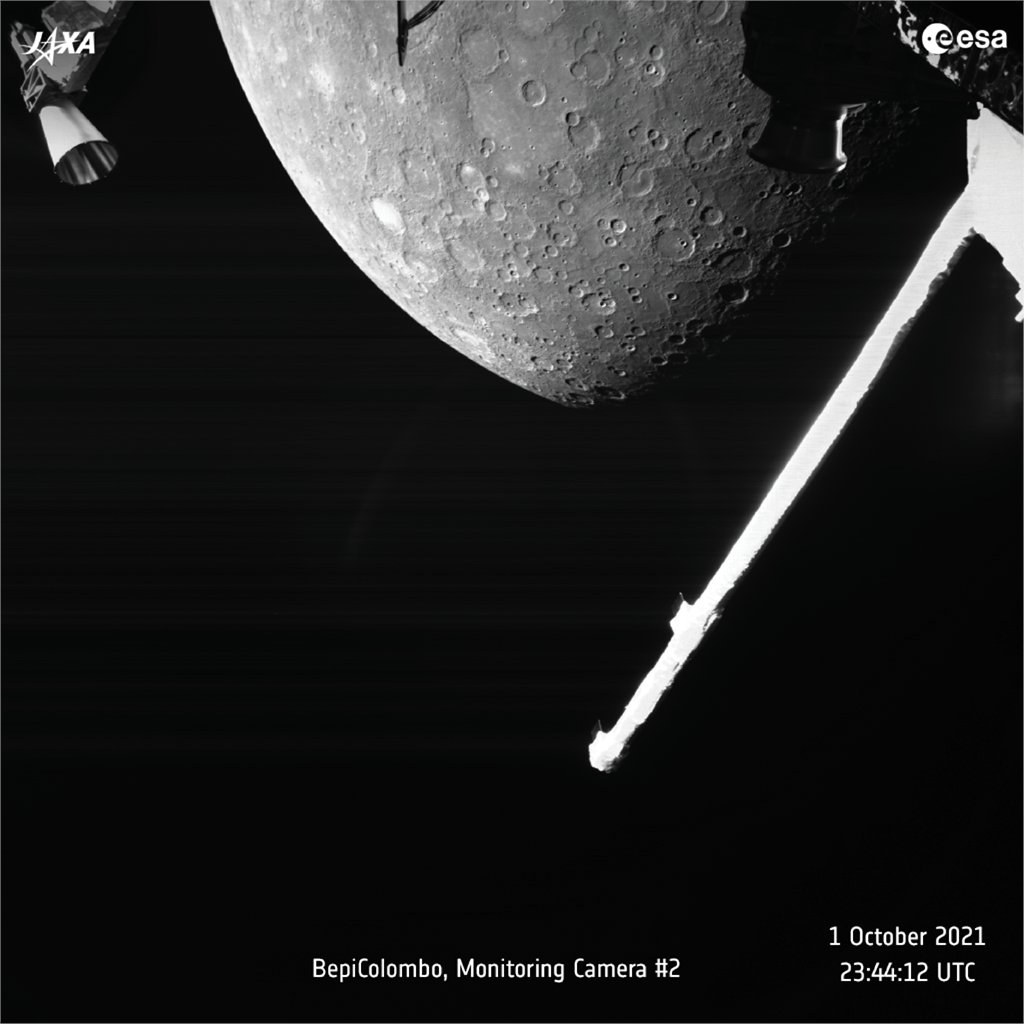
En la noche del 1 al 2 de octubre de 2021 la sonda BepiColombo llevaba a cabo el primero de los seis sobrevuelos que tiene que hacer sobre Mercurio antes de entrar en órbita alrededor del planeta el 5 de diciembre...

Reentrada de la Dragon 23 – SpaceX Un amerizaje en el Golfo de México en la madrugada del 1 de octubre de 2021 ponía fin a la misión de la cápsula de carga Dragon 23 a la Estación Espacial Internacional (EEI) que...

El VSS Unity al principio de uno de sus vuelos «al espacio» – Virgin Galactic Tras la investigación abierta después del vuelo «al espacio» de Richard Branson que hizo que la Administración Federal de Aviación (FAA) de los Estados Unidos le retirara...
La EEI vista desde la Soyuz MS-18 – Oleg Novitskyi/Roscosmos El pasado 28 de septiembre la tripulación de la Soyuz MS-18 cambió su cápsula a otro puerto de la Estación Espacial Internacional (EEI). En concreto la movieron del puerto del módulo Rassvet...

La Starliner de vuelta en el edificio en el que es ensamblada – Boeing Hace un par de días la NASA anunciaba una reorganización de su departamento de misiones tripuladas que yo creo que dará que hablar en el futuro. Y cuando...

Vista desde la cabina del Falcon 20 de la DLR durante los vuelos de calibración – Thomas Marwick/DLR Lanzado el 23 de agosto de 2018, el satélite medioambiental Aeolus está demostrando ser un gran éxito a la hora de medir la velocidad...

A veces las «inteligencias artificiales», también conocidas en este caso como sistemas de recomendación, aciertan y todo. Como por ejemplo cuando YouTube me recomendó el vídeo de Jared Owen titulado How does the Soyuz Spacecraft work?. Se trata de una explicación...
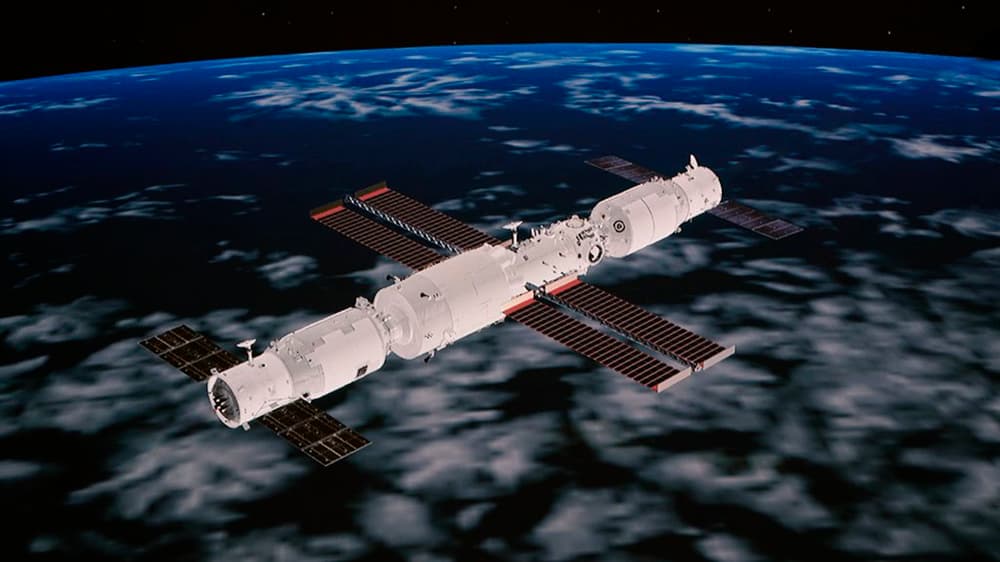
Footage of Tianzhou-3 docking with Tianhe from CCTV. At the end you'll see a surprise strapped in for the ride to orbit. [CCTV] pic.twitter.com/OYffOm26Ws— Andrew Jones (@AJ_FI) September 20, 2021 Poco menos de siete horas después de su lanzamiento a bordo de...

Splashdown! Welcome back to planet Earth, @Inspiration4x! pic.twitter.com/94yLjMBqWt— SpaceX (@SpaceX) September 18, 2021 Esta pasada noche –aunque a última hora de la tarde allí– la cápsula Crew Dragon Resilience amerizaba en el Atlántico frente a la costa de Florida, poniendo fin con...

This a very cool review of the Shenzhou-12 mission from China's human spaceflight agency, CMSA, posted on Weibo. https://t.co/euGBkTQpOf pic.twitter.com/aRWS5oUX9T— Andrew Jones (@AJ_FI) September 17, 2021 El viernes 17 de septiembre de 2021 la cápsula tripulada Shenzhou 12 aterrizaba en el desierto...

The crew of #Inspiration4 had an incredible first day in space! They’ve completed more than 15 orbits around planet Earth since liftoff and made full use of the Dragon cupola. pic.twitter.com/StK4BTWSA6— Inspiration4 (@inspiration4x) September 17, 2021 Antes de este verano, más del...

Apenas unas horas después de que SpaceX lanzara el primer lote de satélites para la segunda capa de su constelación Starlink para acceso a Internet la empresa británico–india OneWeb hacía el lanzamiento de su décimo lote de satélites, también para el...

Esta pasada noche un cohete Falcon 9 despegaba del Complejo de lanzamiento espacial 4E de la Base de la Fuerza Espacial de Vandenberg en California para poner en órbita 51 satélites Starlink. El lanzamiento marca el inicio de los lanzamientos de...
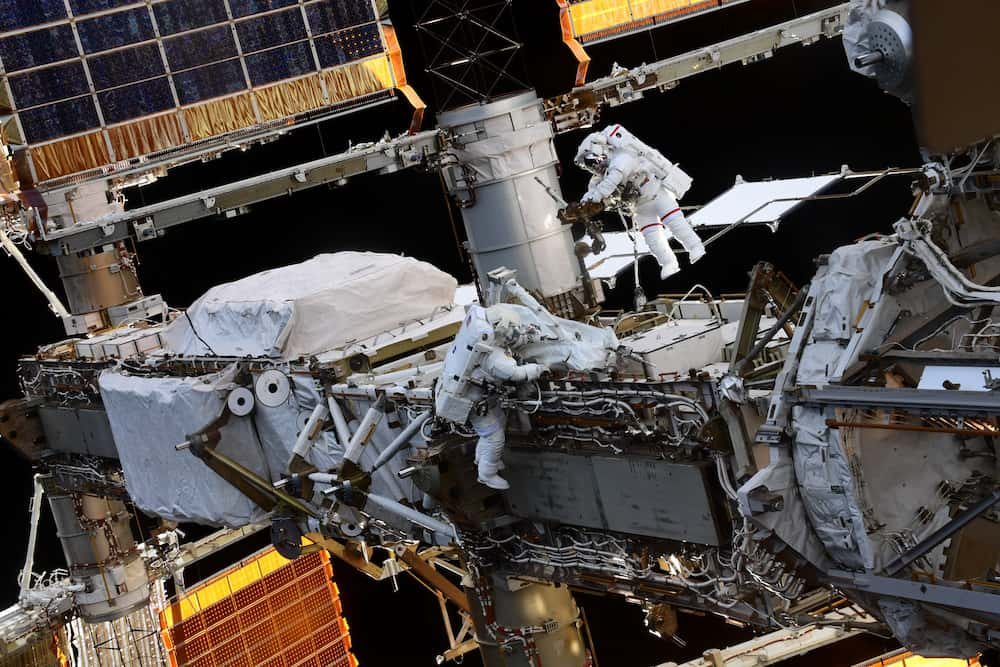
Akihiko Hoshide y Thomas Pesquet durante el paseo espacial – Thomas Pesquet/ESA En un paseo espacial de 6 horas y 54 minutos Akihiko Hoshide de la Agencia Japonesa de Exploración Aeroespacial (JAXA) y Thomas Pesquet de la Agencia Espacial Europea (ESA) dejaron...

La Crew Dragon Resilience en la plataforma de lanzamiento. Se aprecia el logo de la misión en uno de los carenados de los motores Super Draco – SpaceX Este pasado fin de semana la tripulación de la misión espacial privada Inspiration4 hizo...
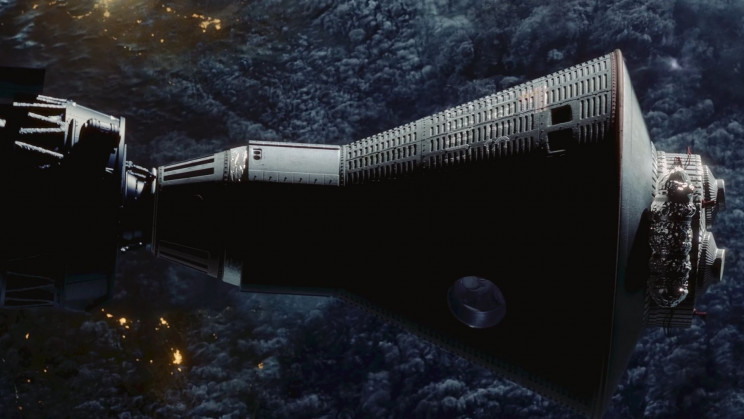
Dado que Steve «Woz» Wozniak, uno de los Steves fundadores de Apple, no debe andar mal de dinero, también ha formado su propia empresa espacial. Llamada Privateer Space por ahora aún no se sabe mucho de ella. Pero por lo que...

Los agujeros dejados en Rochette por las dos primeras tomas de muestras con éxito de Perseverance – NASA/JPL-Caltech/ASU Tras el fracaso del primer intento de toma de muestras por parte del rover Perseverance de la NASA en Marte el equipo de la...
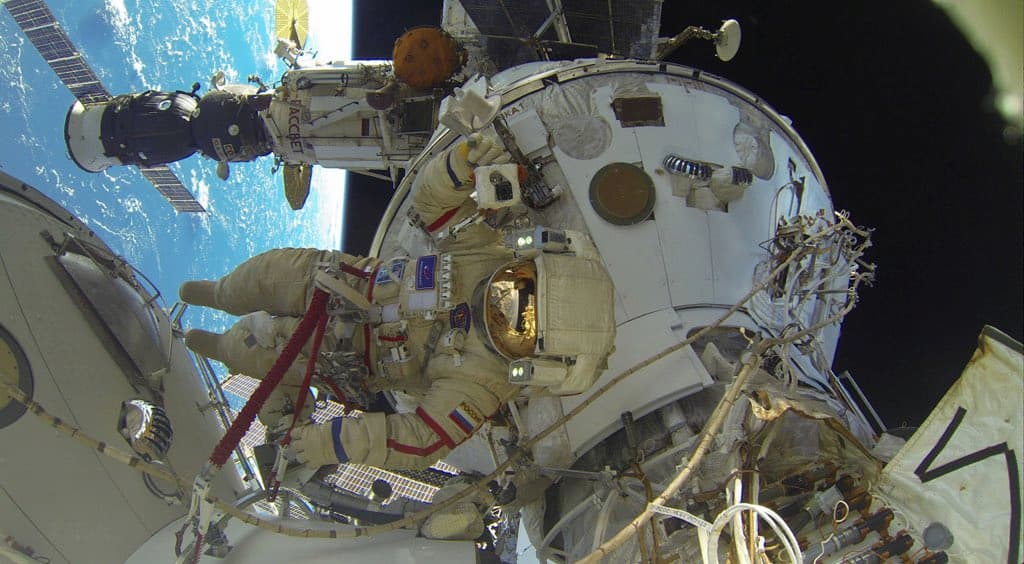
Novitskyi y los pies de Dubrov durante el paseo espacial. ¿Los ves? – Thomas Pesquet/ESA Aunque el módulo Nauka lleva atracado en la Estación Espacial Internacional (EEI) desde el pasado 29 de julio aún hay que terminar de integrarlo con el resto...

Aunque desde hace unos días ya está listo para su traslado al Centro Espacial de Kourou la Agencia Espacial Europea (ESA) y la NASA han anunciado que el lanzamietno del elescopio Espacial James Webb se va a retrasar hasta el 18...

Esta misión abrirá una nueva dimensión en cuanto a quién participa en una misión espacial. Y en ese sentido esta es una de las misiones más importantes jamás voladas.– Jeffrey Kluger,Redactor jefe para el espacio de Time. Si todo va según...
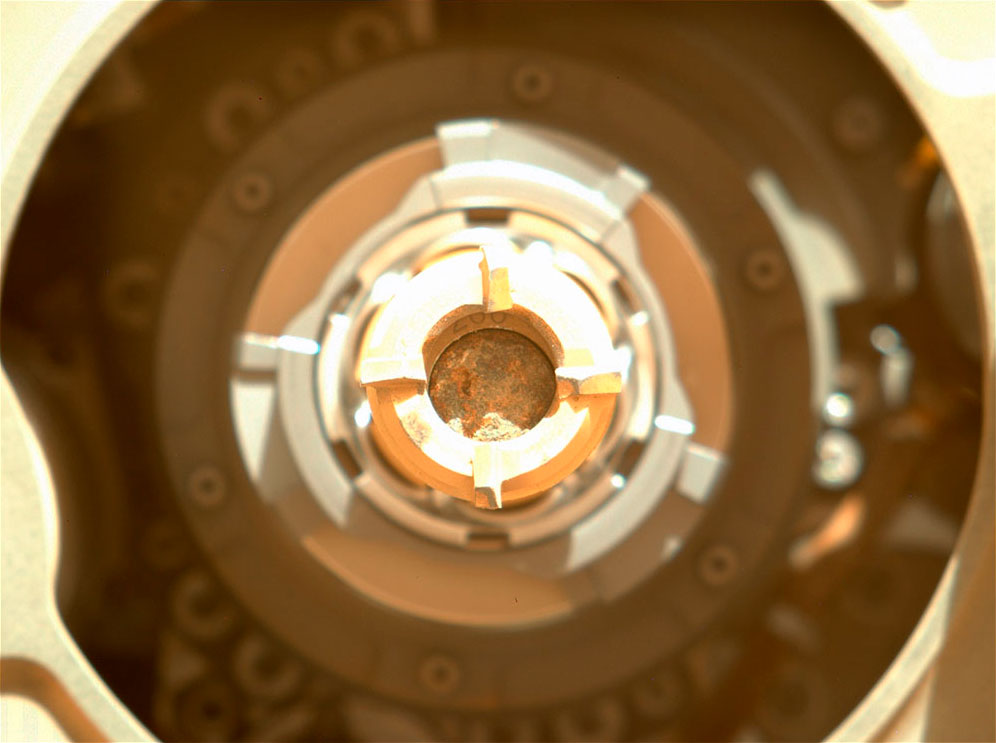
La muestra dentro de la broca – NASA/JPL-Caltech/ASU La NASA acaba de informar de que el tubo de muestras con el número 266 de los que llevó el rover Perseverance a Marte está ya correctamente almacenado en las tripas del rover. Así...

Dubrov en plena faena – Oleg Novitskiy/Roscosmos El viernes 3 de septiembre de 2021 Pyotr Dubrov y Oleg Novitskiy llevaron a cabo el primer paseo espacial de los diez previstos para integrar completamente el recientemente llegado módulo Nauka y el aún por...

El primer cohete Alpha de Firefly Aerospace despegaba a las 5:59, hora peninsular española, desde el complejo de lanzamiento espacial 2 de la Base de la Fuerza Espacial de Vandenberg en California. El objetivo era entrar en órbita. Pero este primer...

Branson disfrutando del vuelo – Virgin Galactic Apenas un par de horas después de haber publicado la anotación en la que hablábamos acerca del interés por parte de la Administración Federal de Aviación de los Estados Unidos (FAA) por el vuelo en...

El primer Alpha en la plataforma de lanzamiento – Firefly Aeerospace/Everyday Astronaut Tras unas cuantas vueltas empresariales en las que Firefly Space Systems quebró y sus propiedades fueron adquiridas por EOS Launcher, que entonces formó Firefly Aerospace con ellas, el cohete Firefly...

Según se puede leer en The Red Warning Light on Richard Branson’s Virgin Galactic Space Flight los pilotos del vuelo de Richard Branson «al espacio» se encontraron con un serio problema durante los primeros instantes que la Administración Federal de los...

El primer objetivo del programa Artemisa de la NASA es volver a colocar una misión tripulada sobre la superficie de la Luna. Ya nadie se cree que antes de que termine 2024, imagino. Pero esa misión incluirá sí o sí a...

Zarya en primer plano con el módulo Poisk, la Soyuz MS-18, y los paneles solares de Zvezda al fondo. El extremo de Zarya que no se ve está conectado al módulo Unity del sector estadounidense de la EEI – NASA Un artículo...

La Dragon 23 durante su aproximación a la EEI – Thomas Pesquet/ESA Tras su lanzamiento a primera hora del 29 de agosto de 2021 la cápsula de carga Dragon 23 de SpaceX se acoplaba al puerto frontal del módulo Harmony de la...

Este pasado fin de semana Astra llevó a cabo el tercer intento de lanzamiento orbital de un cohete Rocket 3.0. El intento fracasó, pero lo hizo de una forma espectacular. Y que además habla muy bien del sistema de guiado del...

Con años de retraso y un coste también muy superior a lo previsto el personal de Northrop Grumman en Redondo Beach en California en por fin ha terminado todas las pruebas del telescopio espacial James Webb, que por fin está listo...
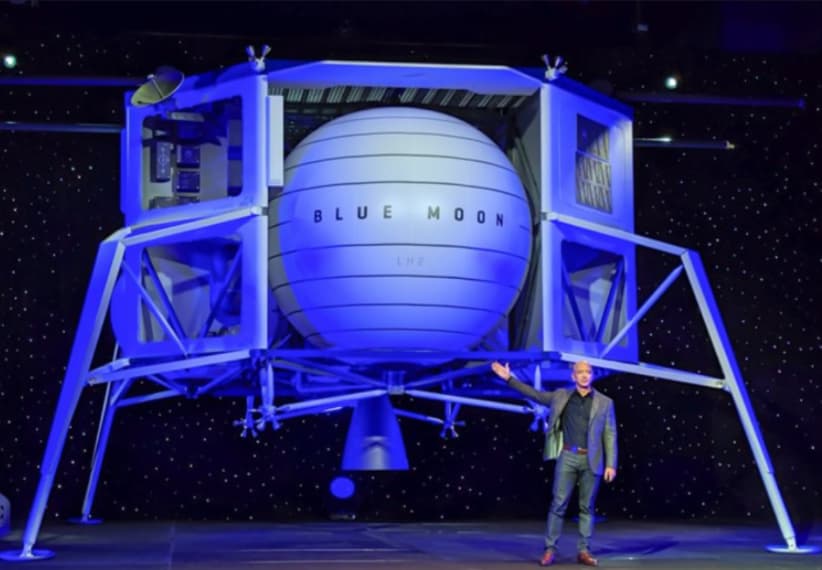
Jeff Bezos durante la primera presentación pública del concepto de módulo lunar de Blue Origin – CC BY-SA 4.0 Dave Mosher En una decisión de mal perdedor y que ha levantado ampollas Blue Origin ha denunciado a la NASA por no adjudicarle...
Todo estaba preparado a bordo de la Estación Espacial Internacional (EEI) para que Akihiko Hoshide de la Agencia Japonesa de Exploración Aeroespacial (JAXA) y Mark Vande Hei de la NASA llevaran hoy a cabo un paseo espacial. Pero un nervio pinzado en...

Сейчас группировка спутников #OneWeb на низкой околоземной орбите насчитывает 254 космических аппарата, планируется запуск сотен других. Сегодняшний запуск должен довести количество спутников OneWeb на орбите до 288 единиц.Но пока давайте посмотрим повтор пускаpic.twitter.com/2vdmUO7ygx— РОСКОСМОС (@roscosmos) August 21, 2021 La empresa angloindia OneWeb...
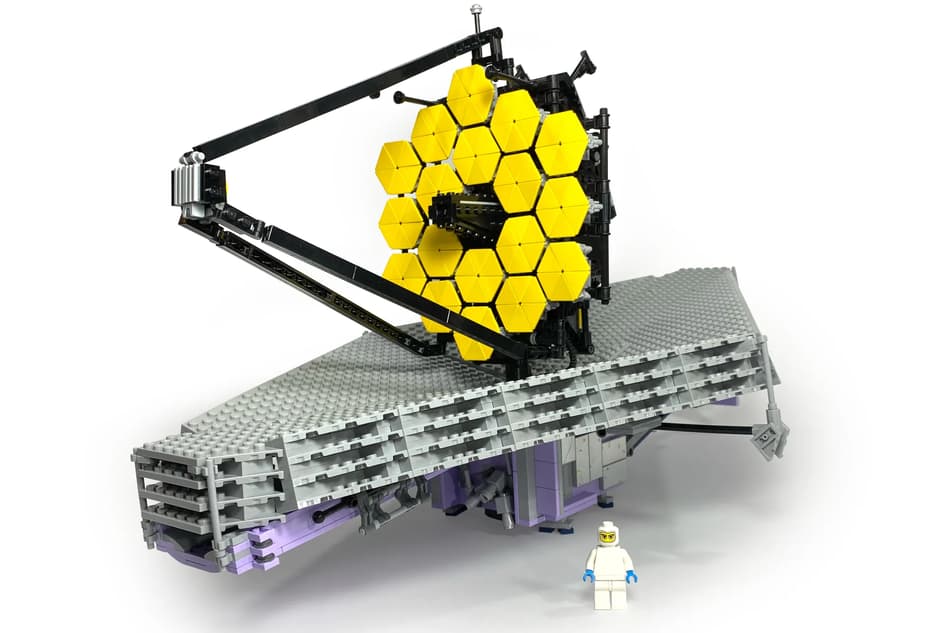
El JWST de Lego propuesto por tonysmyuncle James Webb Space Telescope (JWST) es una propuesta de tonysmyuncle para que Lego saque un Telescopio espacial James Webb. Está a la escala de los minifig, como se puede ver en la foto. E igual...
Zhurong sobre la superficie de Marte en primer plano y más atrás y a la derecha su plataforma de aterrizaje – CNSA/PEC El pasado 15 de agosto el rover chino Zhurong de la misión Tianwen–1 cumplía los 90 soles (días marcianos) en...

Personal de Boeing trabajando en las válvulas rebeldes – Boeing Tras diez días de trabajo en los que sólo consiguieron recuperar 9 de las 13 válvulas que se negaban a abrirse –y eso haciendo un poco de vudú– a Boeing y la...
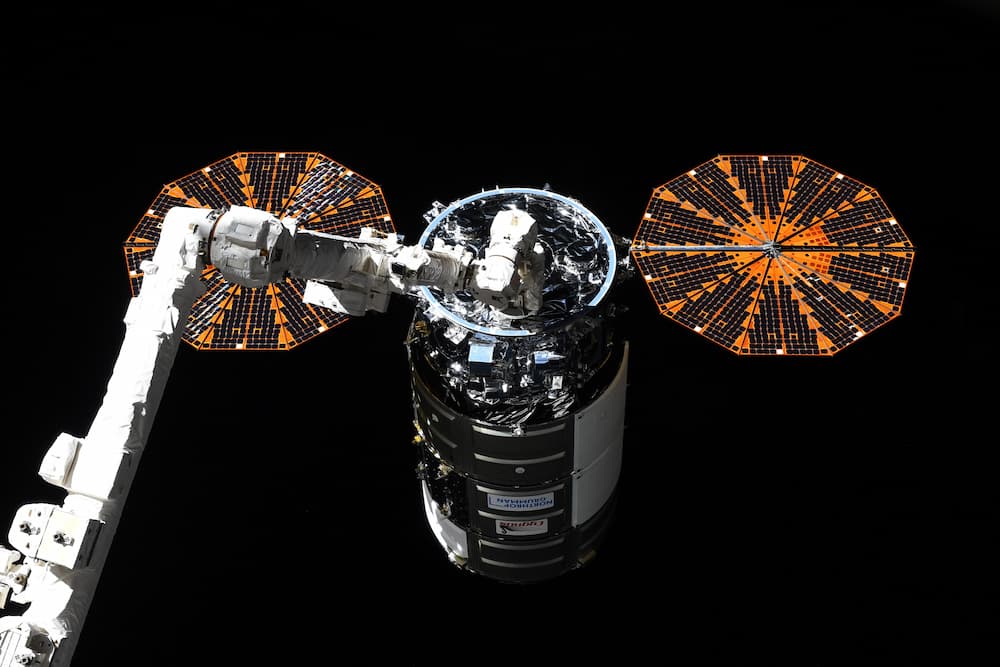
La «Ellison Onizuka» a su llegada a la EEI – Thomas Pesquet/ESA Día y medio después de su lanzamiento la cápsula de carga Cygnus NG 16 «S.S. Ellison Onizuka» era capturada por el brazo robot de la Estación Espacial Internacional (EEI) para...

Agujero dejado por la primera toma de muestras de Perseverance – NASA/JPL-Caltech El 6 de agosto de 2021 el rover Perseverance llevó a cabo su primera toma de muestras en Marte. O más bien su primer intento de toma de muestras, porque...

El primer Starship completo en su plataforma de lanzamiento – Elon Musk / SpaceX Tres meses exactos después del vuelo con final feliz del Starship SN 15 el personal de SpaceX en Boca Chica ha conseguido montar un Starship completo por primera...
El VSS Unity al principio de uno de sus vuelos propulsados – Virgin Galactic Después de mucho tiempo de tener cerrada su venta Virgin Galactica acaba de poner de nuevo en venta plazas en sus vuelos suborbitales «al espacio». La broma/capricho sale...

Moving rocket to orbital launch pad pic.twitter.com/zZLiXIPD6M— Elon Musk (@elonmusk) August 4, 2021 La cuenta de Twitter de Elon Musk está sirviendo como testigo de la actividad frenética que se está llevando a cabo en las últimas semanas en las instalaciones de...

Primer lanzamiento, y por ahora el único con éxito, de un Hyperbola–1 de iSpace - iSpace Parece que la mala suerte persigue a iSpace: ayer mismo su tercer lanzamiento orbital fracasó, al parecer porque la cofia protectora no se separó, aunque el...

La Starliner y su Atlas V en la plataforma de lanzamiento - Boeing Tras meses de cambios con la fecha definitiva el pasado 30 de julio todo estaba listo en el Complejo de Lanzamiento 41 (SLC 41) de Cabo Cañaveral para el...

Desde el pasado 20 de julio la Autoridad Federal de Aviación de los Estados Unidos (FAA) ha endurecido los requisitos que exige para otorgar a alguien las alas de astronauta comercial. Es el primer cambio que se produce en la normativa desde...

Impresión artística del aterrizador lunar de SpaceX sobre la Luna – NASA/SpaceX Cuando el pasado mes de abril la NASA otorgó a SpaceX un contrato para construir el aterrizador lunar para el programa Artemisa tanto Blue Origin como Dynetics, las empresas que...

Despegue de la misión VA254 – ESA Después de casi un año un Ariane 5 ECA volvía despegar esta pasada noche del Centro Espacial de Kourou en la Guayana Francesa. A bordo iban los satélites de telecomunicaciones Eutelsat Quantum y el Star...

Pyotr Dubrov and I welcome everyone from our new module #Nauka!We will conduct a more detailed tour soon. pic.twitter.com/4J5GoOjzJq— Oleg Novitskiy (@novitskiy_iss) July 31, 2021 Después del susto del pasado jueves cuando los motores de Nauka empezaron a funcionar sin que nadie...

I captured a short clip from the EHDC_6 camera (HDEV feed) during the attitude change when the MLM fired thrusters unexpectedly. This camera normally faces Nadir (down) /1 @Space_Station #NAUKA #MLM pic.twitter.com/DllGIzi6Sa— Liam Kennedy (@liamkennedy) July 29, 2021 Tras varios días de...

Welcome to the space station, Nauka! The Multipurpose Laboratory Module (MLM) successfully docked at 9:29 a.m. EDT. https://t.co/YmAVcYNc6G pic.twitter.com/WVzddwFsEw— International Space Station (@Space_Station) July 29, 2021 EL módulo Nauka de la Estación Espacial Internacional (EEI) ha prolongado sus ocho días de terror...

Este curioso vídeo del canal didáctico Hazegrayart intenta mostrar cómo funciona un cohete Soyuz durante su lanzamiento. Para ello utiliza imágenes reales de un lanzamiento del cosmódromo de Baikonur pero con un cohete 3-D modelado para la ocasión. En el cohete...
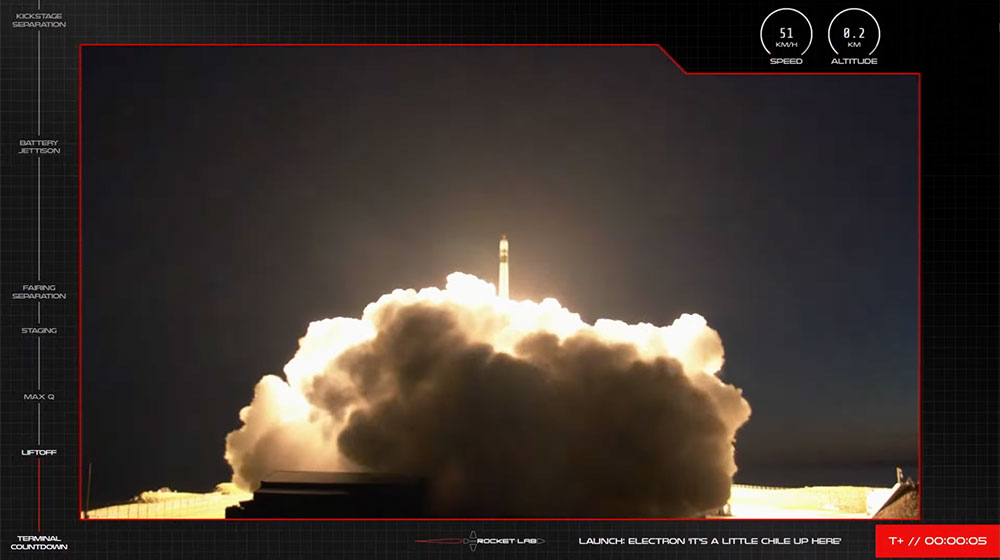
El cohete Electrón de Rocket Lab ha vuelto otra vez al servicio sin problemas con el lanzamiento de la misión It's A Little Chile Up Here para el Space Test Program (Programa de pruebas espaciales) de la Fuerza Espacial de los...

Specialists of the #Nauka Module flight control group performed the final corrective maneuver. The propulsion system of the module worked normally. No new orbit corrections are planned before the Nauka module docking with the @Space_Station, which is scheduled on July 29 pic.twitter.com/E6Ix6gvHOI—...
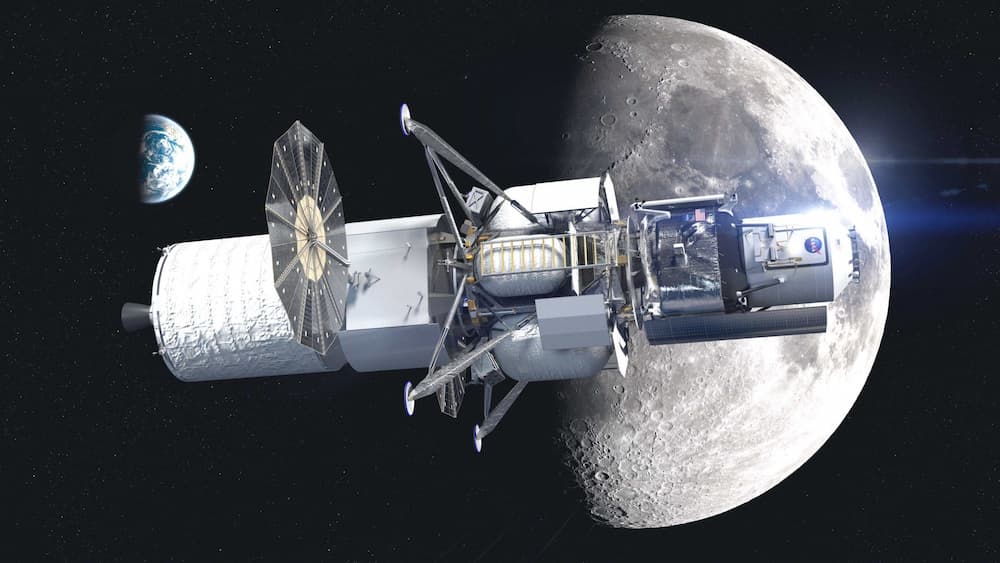
Impresión artística del Integrated Lander Vehicle de National Team rumbo a la Luna – National Team El pasado mes de abril Blue Origin se quedó fuera de la carrera por construir un aterrizador lunar para el programa Artemisa. Pero mientras se resuelve...

Pocas escenas hay tan espectaculares hoy en día como los aterrizajes de los cohetes de SpaceX, ya sea en tierra o sobre los espaciopuertos flotantes que los reciben con total precisión. Sin embargo, llevan arrastrando un problema desde el principio de...

This morning the Pirs docking compartment, with the attached Progress 77 spacecraft, separated from the Space Station that had been its home for the past 20 years. pic.twitter.com/3nK0xB6SZY— International Space Station (@Space_Station) July 26, 2021 Con cuatro días de retraso sobre lo...
Impresión artística de Nauka en órbita – Roscosmos Poco a poco las cosas están teniendo mejor pinta para el módulo Nauka de la Estación Espacial Internacional (EEI), que desde su lanzamiento se había encontrado con todo tipo de problemas. Por un lado...
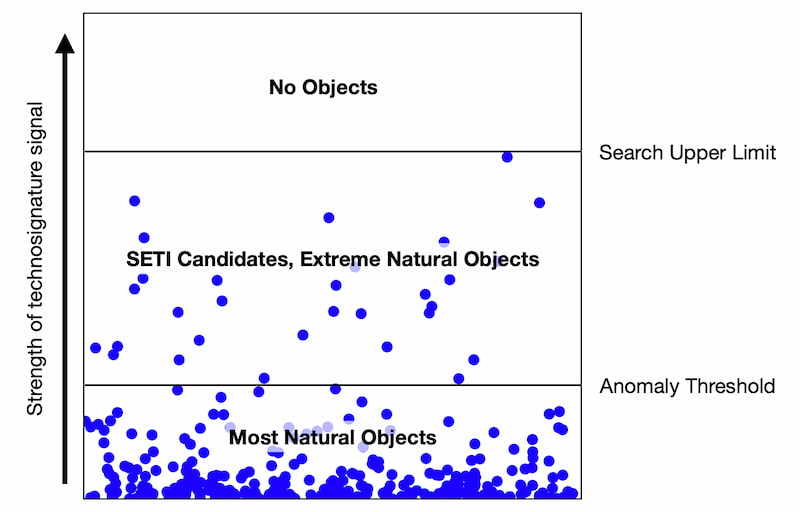
Bajo el interesante y prometedor título Estrategias y consejos para la búsqueda de inteligencia extraterrestre se puede encontrar un trabajo del profesor de astrofísica y astronomía Jason T. Wright donde se repasa el estado actual de la cuestión con un pequeño...
#Nauka update: According to a source, a potentially mission-saving firing of DKS engines (pictured by me) was scheduled between 21:00 and 21:30 Moscow (2-2:30 p.m. EDT) or half an hour from now, if this info is correct. CONTEXT: https://t.co/rugP3QUzrS pic.twitter.com/c1ZXGZcqdb— Anatoly Zak...

#Nauka update: Mission control just programmed the module to conduct first test engine firing. The planned orbit correction to follow, if everything works as planned. DETAILS: https://t.co/KZE3WlnXSu pic.twitter.com/kw9z5FQN1R— Anatoly Zak (@RussianSpaceWeb) July 22, 2021 Aunque oficialmente todo va bien fuentes generalmente bien...

Soft capture confirmed of the @SpaceX Crew Dragon Endeavour to the space-facing port of the Harmony module. https://t.co/cBNqC5JGaz pic.twitter.com/jdreLVH98j— International Space Station (@Space_Station) July 21, 2021 Además del lanzamiento del módulo Nauka hacia la Estación Espacial Internacional (EEI) hoy también pudimos ver...

Missed today’s #Nauka launch? Here is the video of this historic event!By the way, this was the 425th launch of the Proton family rockets. pic.twitter.com/48dO8ur3wL— РОСКОСМОС (@roscosmos) July 21, 2021 Con total puntualidad un cohete Protón–M despegaba hoy a las 16:58:20, hora...

Wally Funk, la más joven de las Mercury 13, y la única que aún vive junto con Gene Nora Jessen, ha viajado hoy al espacio en el primer vuelo tripulado de un New Shepard. Sólo han sido 60 años de espera...

Una gran noticia: el procedimiento para activar el hardware de reserva del ordenador que controla los instrumentos del telescopio espacial Hubble ha funcionado a la perfección y el venerable telescopio vuelve a estar en funcionamiento. Ha estado parado algo más de...

Nauka en su cohete en la plataforma de lanzamiento – Roscosmos Albergaba mis muy serias dudas de que llegáramos a ver esta imagen alguna vez pero al fin el módulo Nauka de la Estación Espacial Internacional (EEI) está en la plataforma de...
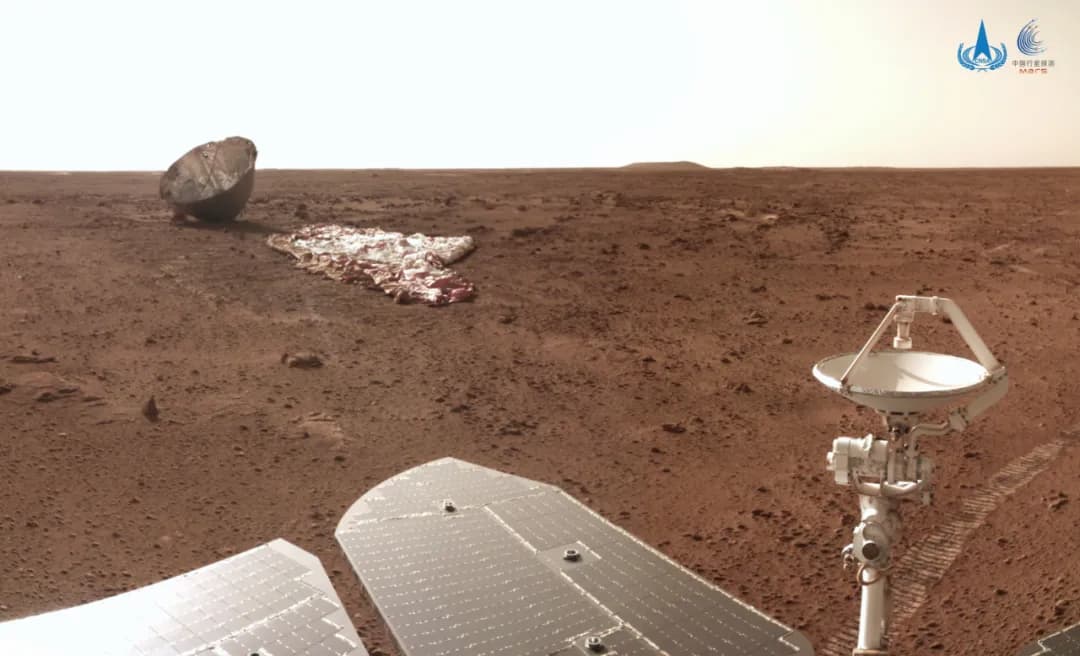
El escudo térmico trasero de Zhurong y su paracaídas – CNSA Dentro de sus paseos por la superficie de Marte el rover chino Zhurong ha obtenido al menos una fotografía de su escudo térmico trasero y su paracaídas. Se encuentran a unos...

En un sorprendente giro de guión –yo si pongo 28 millones de dólares para algo me aseguro de tener la agenda libre– la persona que ganó la plaza que se subastó para ir en el primer vuelo tripulado de un New Shepard...
Despliegue del Hubble desde la bodega del Discovery el 25 de abril de 1990– NASA Tras varias semanas de pruebas la NASA cree tener identificado el componente que ha fallado en el telescopio espacial Hubble y que lo tiene parado desde mediados...

Casi 17 años después de que lo viéramos tan cerca cuando el SpaceShipOne ganó el Ansari X Prize por fin Richard Branson ha conseguido hacer realidad su suelo de viajar «al espacio» en el VSS Unity, el segundo SpaceShipTwo de Virgin...
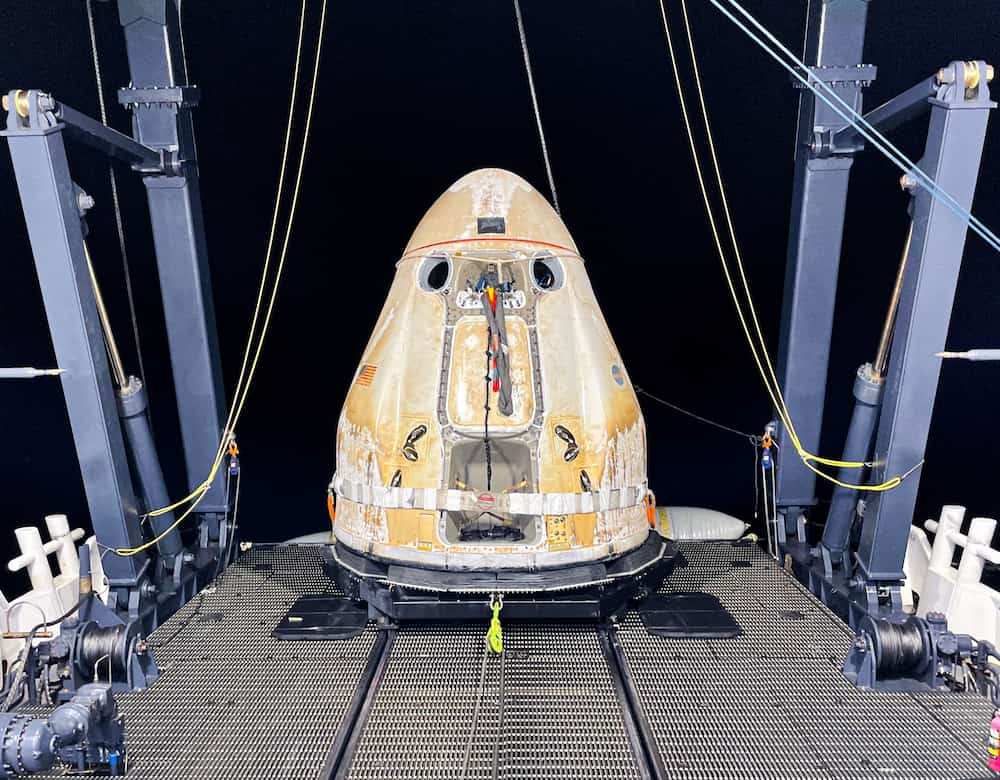
La Dragon 22 a su partida de la EEI – Thomas Pesquet/ESA Con un par de días de retraso sore las previsiones iniciales debido a una meteorología poco colaborativa la cápsula de carga Dragon 22 terminaba su misión con un amerizaje en...

Los primeros nueve vuelos de Ingenuity. El noveno está en amarillo – NASA/JPL-Caltech Me había prometido dejar de escribir de todos los vuelos de Ingenuity en Marte, por mucho que todos y cada uno de ellos sean un logro, y esperar a...

Despegue del Atlantis en la misión STS-135 – Wicho Hoy se cumplen diez años del lanzamiento del Atlantis en la misión STS-135, la última de los transbordadores espaciales de la NASA. Iban a bordo Chris Ferguson, Rex Walheim, Doug Hurley y Sandy...

Dos de los sensores sin protección que casi son pasados por alto – Roscosmos La semana pasada Roscosmos tuvo que anunciar un retraso más en el lanzamiento del módulo Nauka a la Estación Espacial Internacional (EEI). Y fue un poco como tropezar...

La antena de un terminal Starlink sobre el techo de una casa – Starlink La Subsecretaría de Telecomunicaciones (SubTel) del Ministerio de Transportes y Telecomunicaciones de Chile acaba de hacer público que el país será el primero de Latinoamérica en el que...
Impresión artística del lanzamiento del JWST en un Ariane 5 – ESA/D. Ducros A algo menos de cuatro meses de la última fecha de lanzamiento prevista la NASA y la Agencia Espacial Europea (ESA) confirman que el telescopio espacial James Webb (JWST)...

Además de los problemas causados por la pandemia de covid y que redujeron la movilidad de las personas involucradas en el proyecto el mal funcionamiento de los paracaídas para el rover de la misión conjunta de la Agencia Espacial Europea (ESA)...

Los astronautas chinos Liu Boming y Tang Hongbo llevaron a cabo en la mañana del 4 de julio de 2021 el primer paseo espacial en la estación espacial china. Durante 6 horas y 46 minutos instalaron soportes para pies y una...
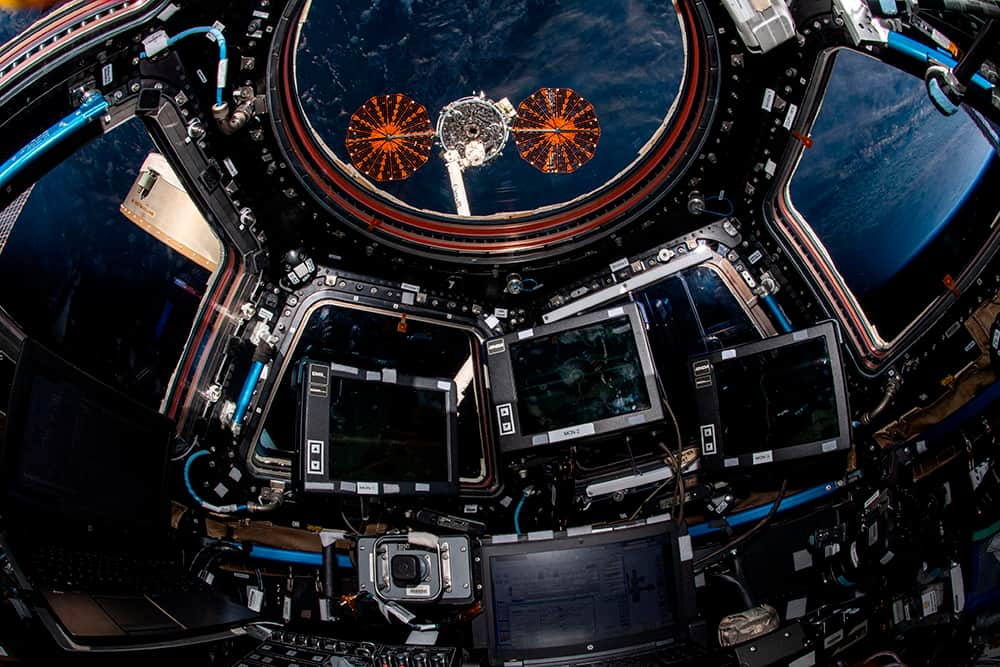
La Cygnus 15 a su partida de la EEI vista desde la Cúpula – NASA La cápsula de carga Cygnus 15 S.S. Katherine Johnson terminaba su misión en la mañana del 2 de julio de 2021 con una reentrada controlada en la...
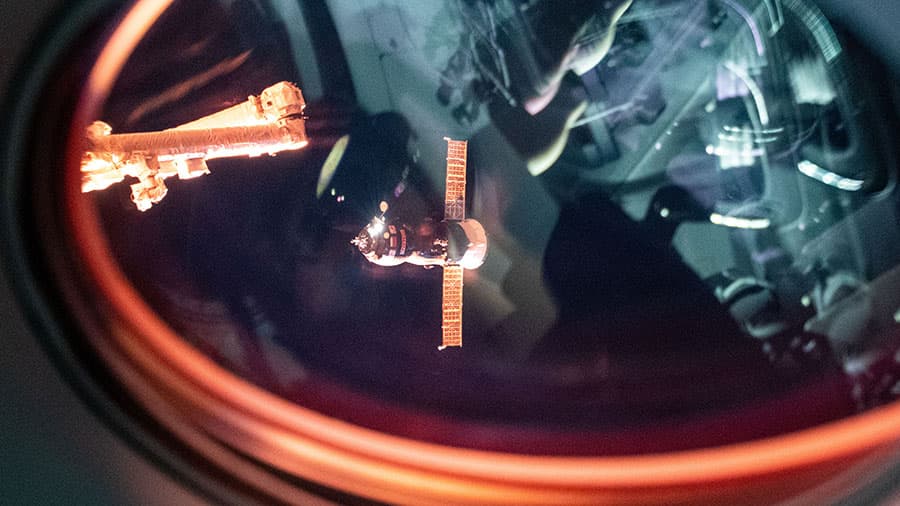
La Progress MS-17 llegando a la EEI – NASA Dos días después de su lanzamiento la cápsula de carga Progress MS-17 (Progress 78 para la NASA) atracaba esta pasada madrugada en el módulo Poisk de la Estación Espacial Internacional. A diferencia de...
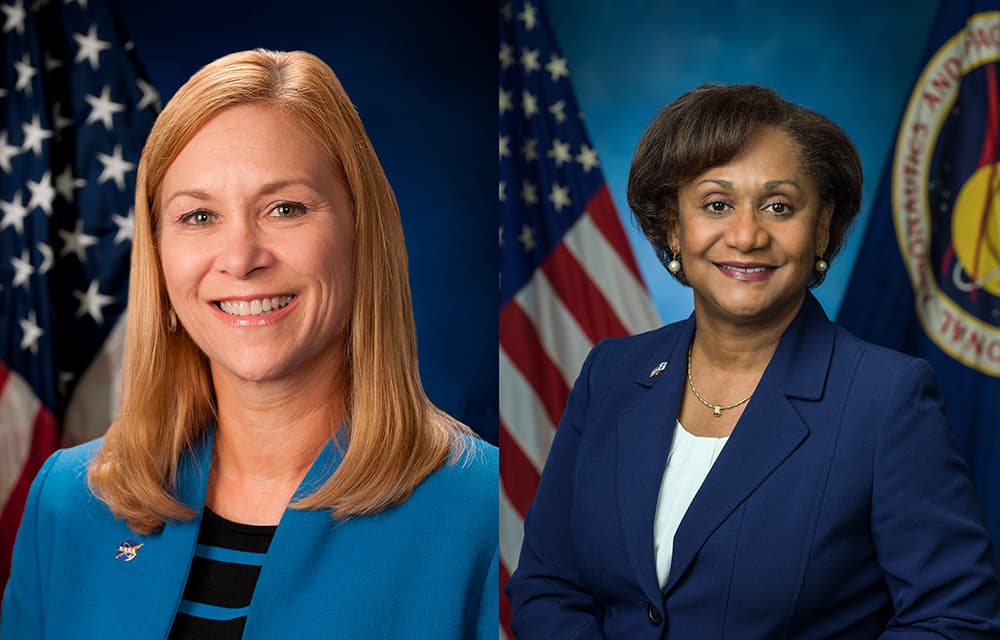
Janet Petro (izquierda) y Vanessa Wyche – NASA Bill Nelson, el director de la NASA, acaba de firmar la orden que convierte a Janet Petro en directora del Centro Espacial Kennedy (KSC), puesto que ya ocupaba en funciones desde el pasado 17...
Nauka encapsulado en su cofia protectora – Roscosmos Andaba estos días Roscosmos muy ufana mostrando el módulo Nauka de la Estación Espacial Internacional (EEI) ya encapsulado para su lanzamiento, listo para ser enviado para ser acoplado al cohete Protón que lo iba...

Si todo va según lo recién anunciado por Virgin Galactic la carrera no declarada entre Jeff Bezos y Richard Branson por ver quién de los dos vuela primero al espacio será ganada por Branson. Y es que según se puede leer...

В честь пятого запуска «пять до 50» и доставки всех спутников в срок на головном обтекателе было размещено приветственное сообщение «Привет, Северный полюс», которое символизировало значительный прогресс компании #OneWeb в процессе покрытия территории Арктики pic.twitter.com/WFriyPYh5V— РОСКОСМОС (@roscosmos) July 1, 2021 Un cohete...
Wally Funk frente a un Lockheed P-80 Shooting Star Según acaba de anunciar Blue Origin la cuarta persona que irá a bordo del primer lanzamiento tripulado de un cohete New Shepard será Wally Funk, una de las Mercury 13, quien irá por...

Virgin Orbit ha conseguido lanzar con éxito un nuevo cohete LauncherOne. Es el segundo lanzamiento con éxito de este tipo de cohete. Bautizada como Tubular Bells, Part One¹ la misión, que la empresa la considera como el primer lanzamiento operativo del...
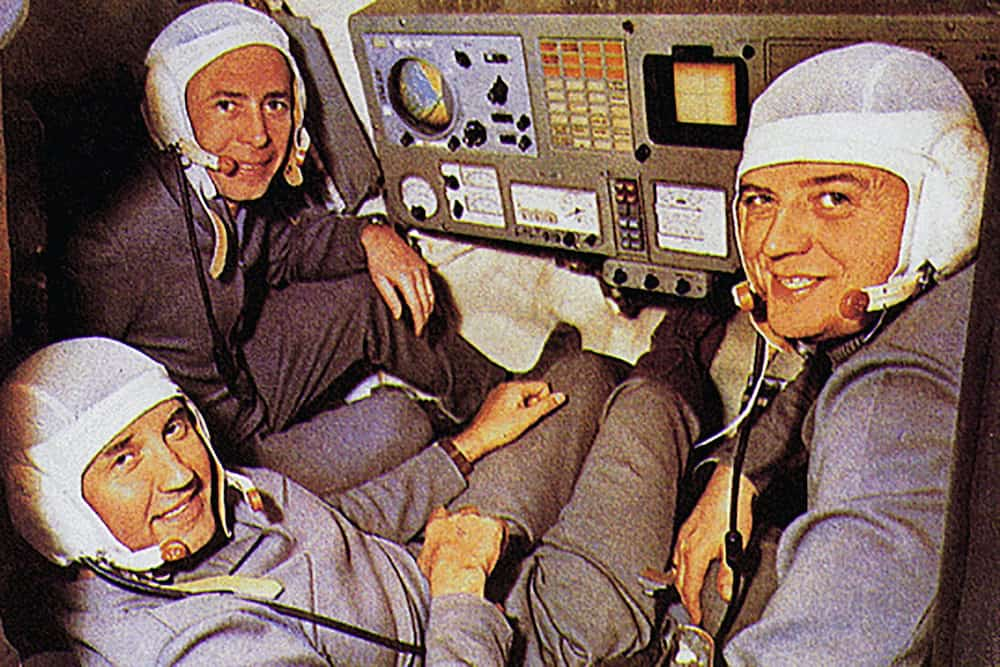
La tripulación de la Soyuz 11 durante uno de sus sus entrenamientos El 30 de junio de 1971 a las 2:16:52 UTC la cápsula tripulada Soyuz 11 aterrizaba en la estepa kazaja. Cuando pocos minutos después los equipos de tierra llegaron junto...

El rover chino Zhurong de la misión Tianwen–1, que lleva desde el 22 de mayo de 2021 sobre la superficie de Marte, se ha convertido en el primero de la historia en grabarse en vídeo en otro astro. En un vídeo...
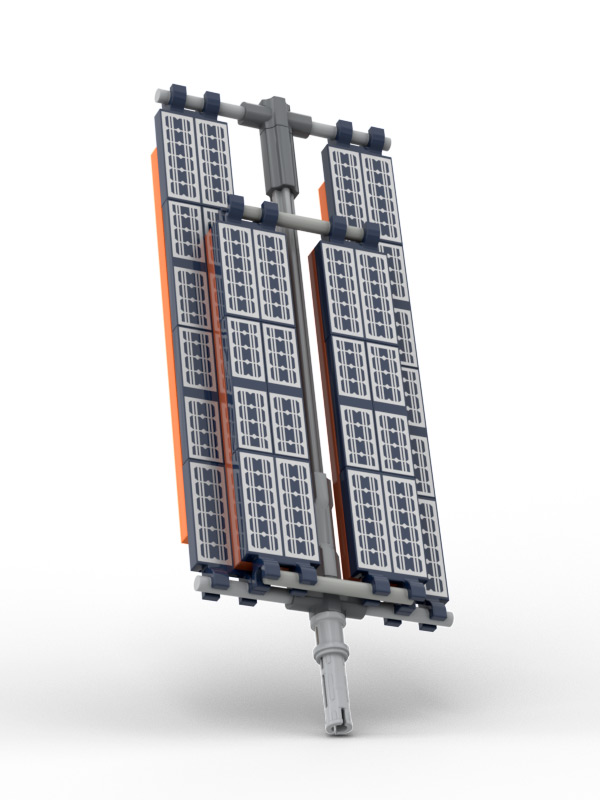
Si tienes la Estación Espacial Internacional (EEI) de Lego y te preocupa que no esté al día porque no tiene los paneles solares desenrollables iROSA recientemente instalados no te preocupes: Cristoph Ruge tiene la solución. Cristoph es quien propuso en Lego...

This time-lapse shows the second iROSA, or roll-out solar array, unrolling after installation by @astro_kimbrough and @Thom_astro during their spacewalk. The actual unraveling took just 10 minutes and concluded at 1:55 EDT.Details: https://t.co/1eYY4qreKs pic.twitter.com/n9sZuv04gD— NASA's Johnson Space Center (@NASA_Johnson) June 25, 2021...
Después del vuelo de prueba del pasado 22 de mayo la Autoridad Federal de Aviación (FAA) de los Estados Unidos ha modificado el permiso de vuelo de Virgin Galactic. Ahora ya pueden hacer vuelos «al espacio» con pasajeros. En el vuelo...
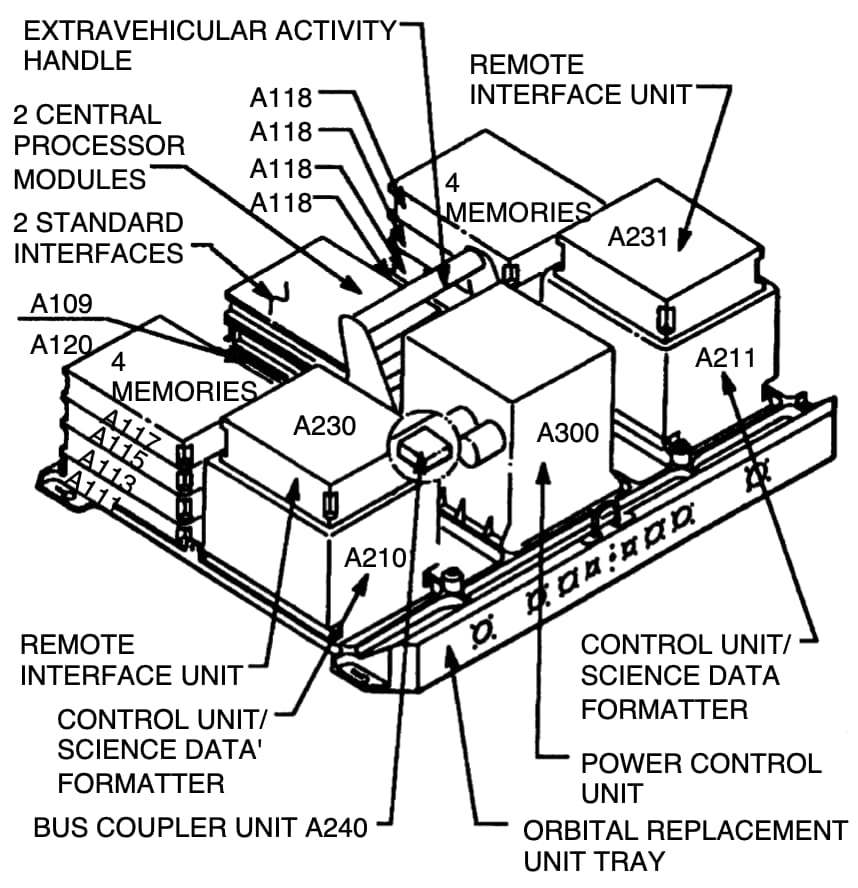
La NASA sigue intentando averiguar qué pasa con el Hubble, más en concreto con el ordenador que controla sus instrumentos científicos. Un fallo en él tiene parado el telescopio desde el pasado 13 de junio. En principio parecía que el fallo estaba...
Despliegue del Hubble el 24 de abril de 1990 – NASA El telescopio espacial Hubble lleva parado desde el pasado 13 de junio mientras la NASA intenta dar con el origen del fallo que hizo que se detuviera el ordenador que controla...
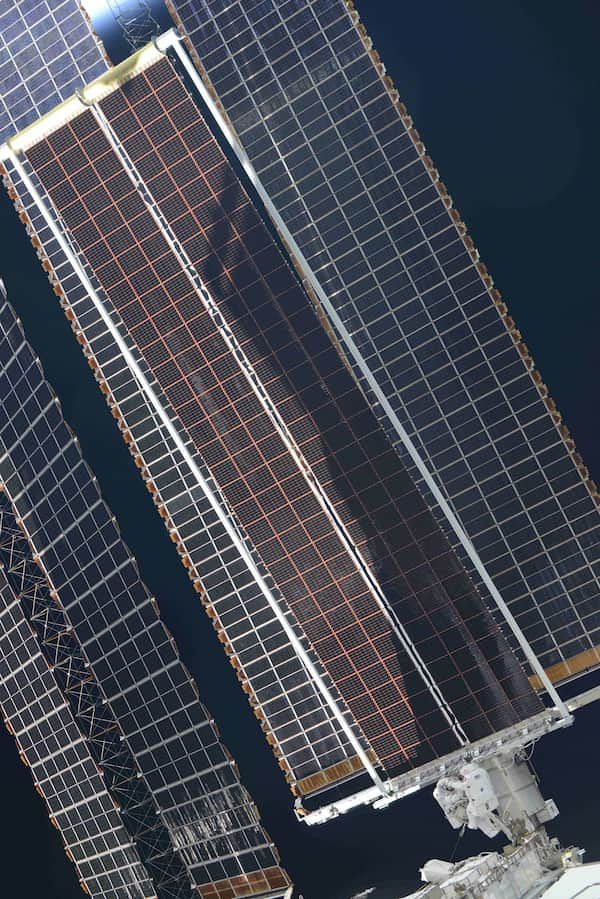
El nuevo panel ya desenrollado – Oleg Noviskiy/Roscosmos En su segundo paseo espacial de esta semana Thomas Pesquet y Shane Kimbrough por fin consiguieron terminar de instalar el primero de los paneles solares iROSA de la Estación Espacial Internacional (EEI). Su nombre...
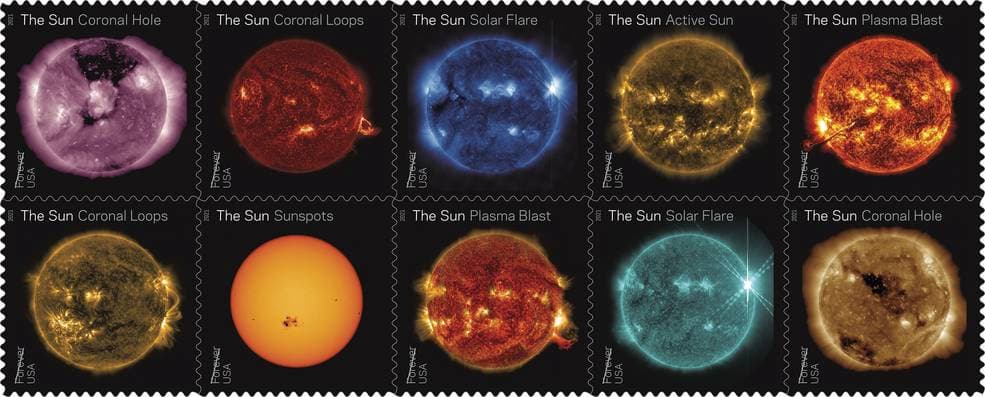
La serie de diez sellos – U.S. Postal Service El Servicio Postal de los Estados Unidos (USPS) acaba de presentar una serie de diez sellos que conmemoran el décimo aniversario del lanzamiento y entrada en servicio del Solar Dynamics Observatory (SDO), un...

La Shenzhou 12 a punto de acoplarse - CNSA La primera tripulación de la estación espacial china ya está a bordo. Fue lanzada esta mañana a bordo de la cápsula tripulada Shenzhou 12 por un cohete Larga Marcha 2F. Su cápsula atracó...
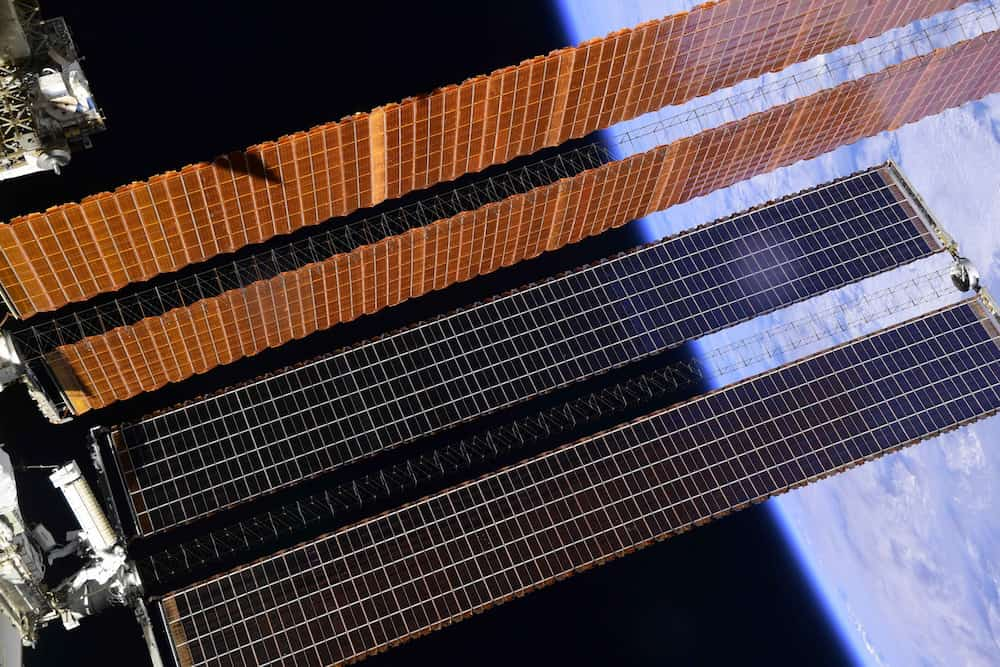
Kimbrough y Pesquet durante su paseo espacial. ¿Los ves? – Oleg Novistky/Roscosmos Los astronautas Thomas Pesquet y Shane Kimbrough llevaron ayer a cabo el primer paseo espacial dedicado a instalar los dos nuevos paneles solares desenrollables de la Estación Espacial Internacional (EEI)...
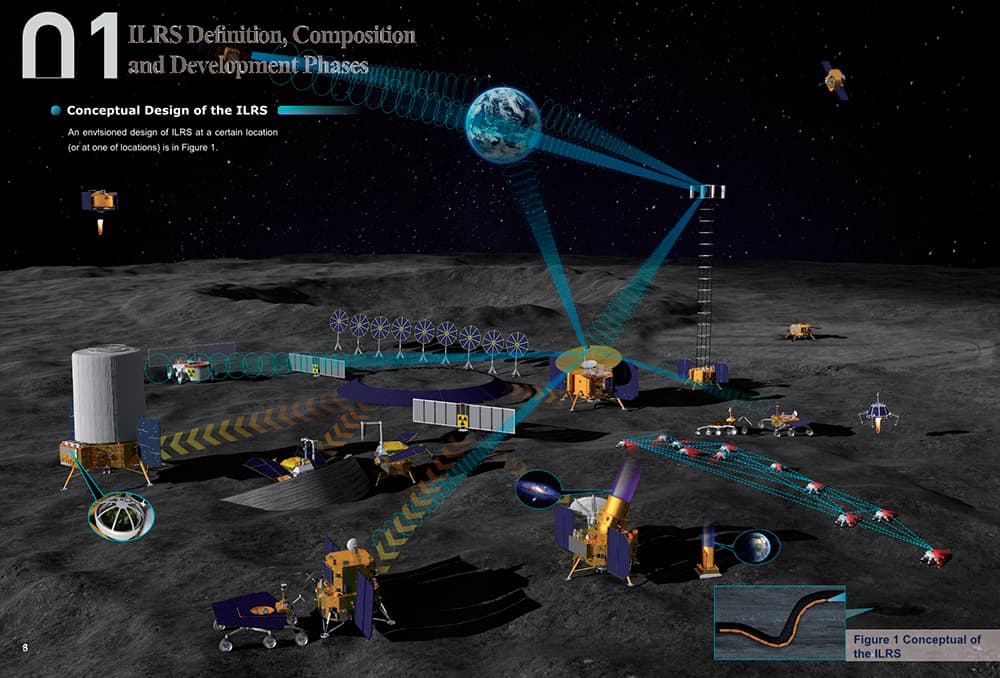
Durante el congreso GLEX sobre exploración espacial China y Rusia han presentado la primera versión –muy preliminar– de su plan para construir la Estación Internacional de Investigación Lunar, ILRS por sus siglas en inglés¹. Tiene tres fases con el objetivo de...

Impresión artística de una Starliner separándose de la segunda etapa del Atlas V - Boeing Al final Boeing y la NASA han conseguido encontrar un hueco y adelantan la segunda misión de prueba de la cápsula tripulada Starliner, conocida como OFT-2, al...

Vistas a través de la ventana de la RSS First Step en uno de sus vuelos de prueba – Blue Origin Apenas fueron necesarios siete minutos para que en la subasta pública celebrada ayer el asiento disponible para el primer vuelo tripulado...

Imagen alegórica de los tres grandes temas escogidos – ESA Después de escuchar las sugerencias de la comunidad científica la Agencia Espacial Europea acaba de anunciar cuales van a ser los temas principales para las misiones más ambiciosas de su programa Voyage...
El rover Zhurong sobre la superficie de Marte en primer plano y más atrás y a la derecha su plataforma de aterrizaje – CNSA/PEC Llevábamos semanas sin noticias de Zhurong, el rover de la misión china Tianwen–1 que pisó la superficie de...

La semana pasada, cuando la NASA anunciaba que había escogido seguir adelante con el desarrollo de las misiones Davinci+ y Veritas para visitar Venus ya mencionábamos que la Agencia Espacial Europea (ESA) podía decidir hacer lo propio con la misión EnVision....
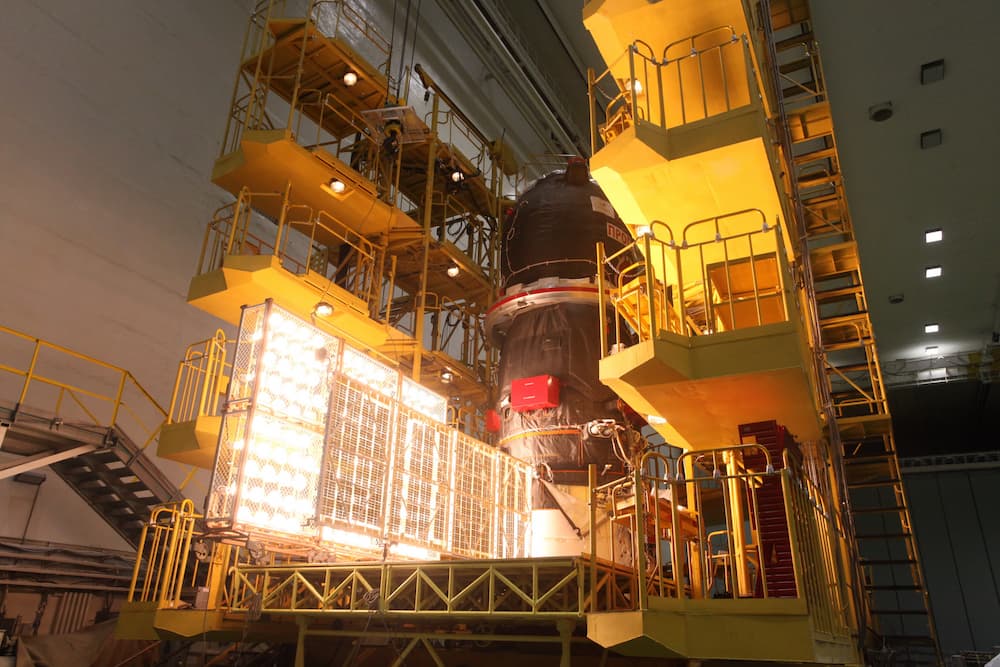
Las bombillas sin encender – Roscosmos Las bombillas, y es de esperar que el panel solar también, dándolo todo – Roscosmos Roscosmos ha publicado una serie de fotos sobre el proceso de instalación y comprobación del funcionamiento de los paneles solares de...

Una de las fotos de navegación tomadas por Ingenuity durante su séptimo vuelo – NASA/JPL-Caltech El helicóptero Ingenuity de la NASA completaba su séptimo vuelo en Marte el 8 de junio de 2021. Durante él se desplazó 106 metros en dirección sur....

Hoy se ha sabido que además de la persona que gane la subasta de una de las plazas disponibles en el primer vuelo tripulado de un cohete New Shepard de Blue Origin otras dos de las plazas estarán ocupadas por Jeff...

Lanzamiento del satélite de telecomunicaciones SXM-8 – SpaceX Un Falcon 9 bloque 5 de SpaceX ponía en órbita el satélite de telecomunicaciones SXM-8 en la madrugada del 6 de junio de 2021. Era el lanzamiento con éxito número 125 de la empresa,...

La Dragon 22 durante su aproximación a la EEI. En primer plano el laboratorio europeo Columbus y la Crew Dragon Resilience – Oleg Novitskiy/Roscosmos Tras su lanzamiento el pasado 3 de junio a bordo de un Falcon 9 de SpaceX la cápsula...

Una Crew Dragon en aproximación a la EEI – Axiom Space Axiom Space y SpaceX acaban de hacer pública la firma de un contrato por el que la empresa de Elon Musk lanzará tres misiones comerciales más para Axiom a la Estación...

Pyotr Dubrov, durante el paseo espacial – Thomas Pesquet/ESA/NASA Durante un paseo espacial de siete horas y 19 minutos llevado a cabo el 2 de junio de 2021 Pyotr Dubrov y Oleg Novitskiy dejaron listo el módulo Pirs de la Estación Espacial...

Venus en una imagen compuesta creada con datos obtenidos por las misiones Magallanes y Pioneer 13 – NASA La NASA por fin ha anunciado la selección final de su más reciente ronda de misiones del programa Discovery. Las agraciadas han sido Davinci+...
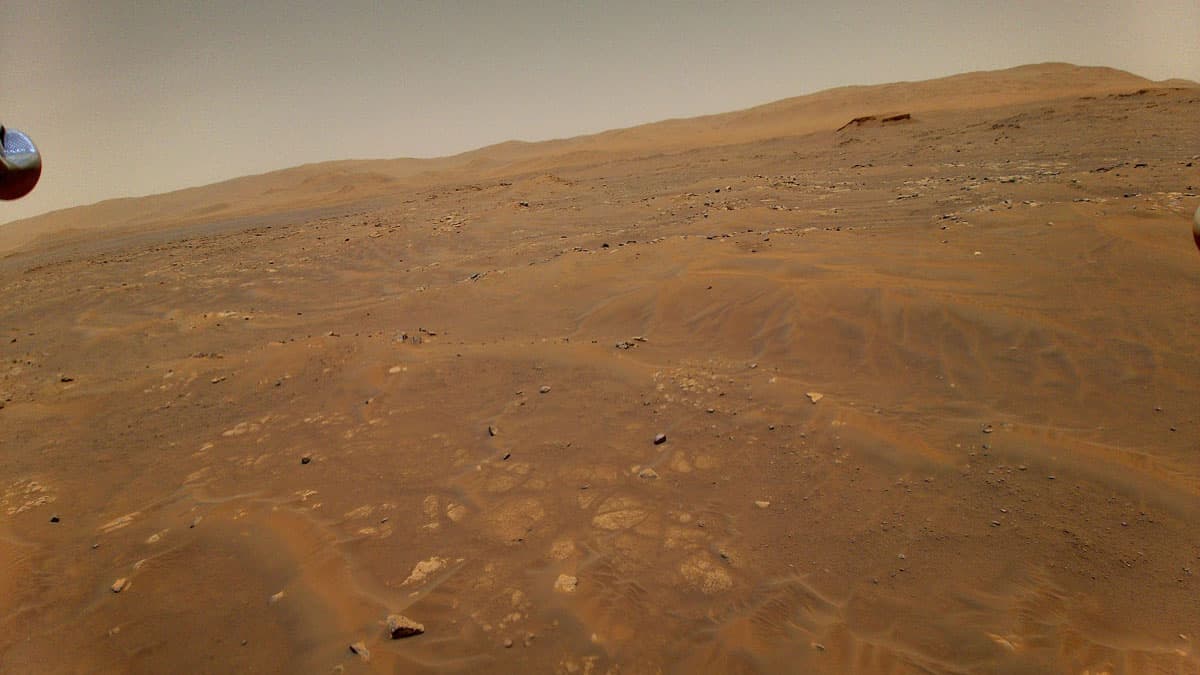
Una de las fotos tomadas desde el aire por Ingenuity durante su sexto vuelo NASA/JPL-Caltech La semana pasada el helicóptero Ingenuity llevó a cabo su sexto vuelo en Marte. El primero dentro de su campaña de explorador para Ingenuity. Pero a diferencia...

Impresión artística del Tianzhou 2 acoplado al puerto posterior de Tiahne – CNSA Ocho horas después de su lanzamiento el 29 de mayo de 2021 la nave de carga Tianzhou 2 se acoplaba de forma autónoma con el módulo Tianhe de la...

El 26 de mayo de 2021 SpaceX puso en órbita un nuevo lote de satélites Starlink. El lanzamiento, llevado a cabo desde el Complejo de Lanzamiento 40 de Cabo Cañaveral, utilizó una primera etapa que ya había ido al espacio una...
Пусковой день на космодроме #Восточный — 28 мая 2021 года.И ваши самые любимые ракурсы — всё в этом видео pic.twitter.com/MKcOivDzyJ— РОСКОСМОС (@roscosmos) May 28, 2021 Un cohete Soyuz-2.1b lanzó esta pasada noche un nuevo lote de 36 satélites de acceso a Internet...
Gracias a los avances de la I+D+I, el espacio se ha convertido en un ámbito transversal, con varios ministerios implicados en desarrollos tecnológicos. Su coordinación requerirá de un cuerpo técnico especializado.Es hora de estudiar la creación de una Agencia Espacial Española.— Pedro...

La Cámara de transferencia de Zvezda es el segmento circular de color gris que contiene el puerto de atraque que se ve en el centro de la imagen - NASA Las fugas de aire que se hay en la Cámara de transferencia...
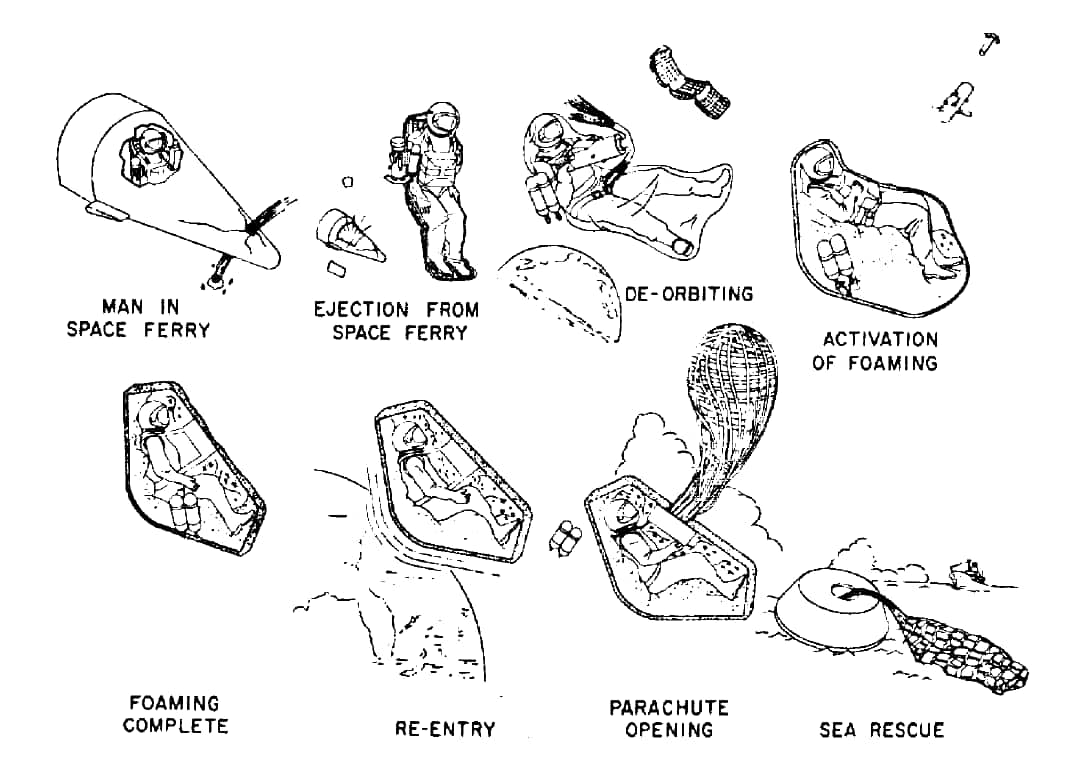
MOOSE – NASA / General Electric Andando por YouTube me he encontrado el vídeo What Would Happen if You Skydived off the ISS? en el que te cuentan lo que pasaría si saltaras de la Estación Espacial Internacional. El vídeo no es...
SpaceX todavía no tiene todas piezas que necesita listas para el primer intento de un lanzamiento orbital de un cohete Starship. Ni los permisos necesarios. Pero precisamente de la tramitación de esos permisos con la Federal Communications Commission (Comisión federal de...

Today’s view: Infinite. #Unity21 made a beautiful ascent to apogee over Spaceport America, New Mexico. #VirginGalactic pic.twitter.com/jphjbMbSr2— Virgin Galactic (@virgingalactic) May 22, 2021 El SpaceShipTwo VSS Unity, con David Mackay y C.J. Sturckow a los mandos, acaba de volar por tercera vez...

Watch: #Zhurong, China's first #Mars Rover, has sent back its first footage from the Red Planet, showing it rolling off the ramp to begin its mobile mission pic.twitter.com/Z8V0AUmWIy— CGTN (@CGTNOfficial) May 22, 2021 Pues como estaba previsto el rover Zhurong de la...
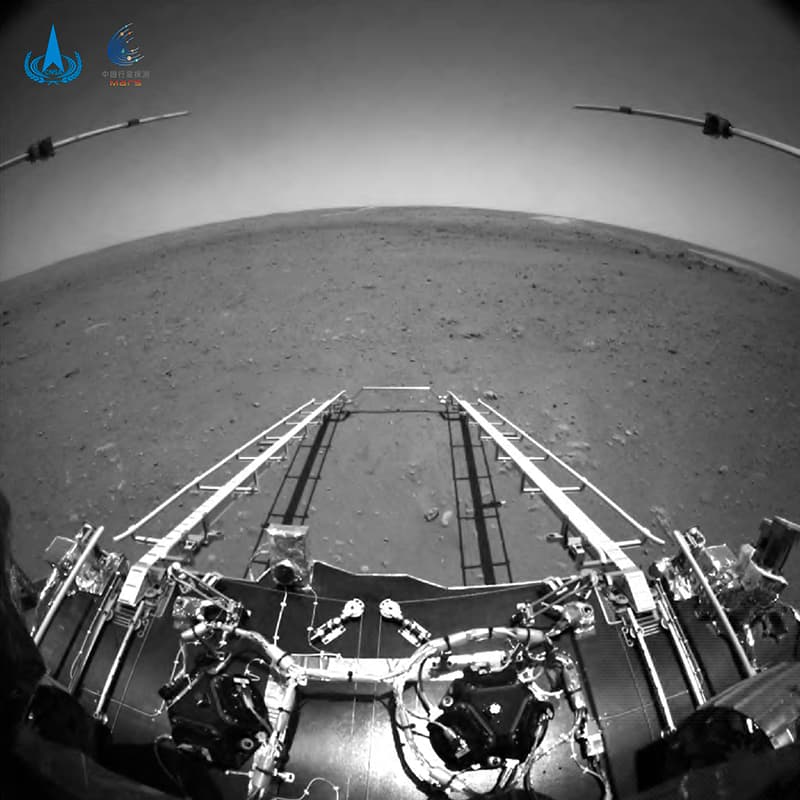
Mirando hacia delante - CNSA El sábado 15 de mayo de 2021 China anunciaba que había hecho aterrizar sin problemas en Marte el rover Zhurong. Pero más allá de eso lo que las personas que sufrimos de espaciotrastorno de todo el mundo...
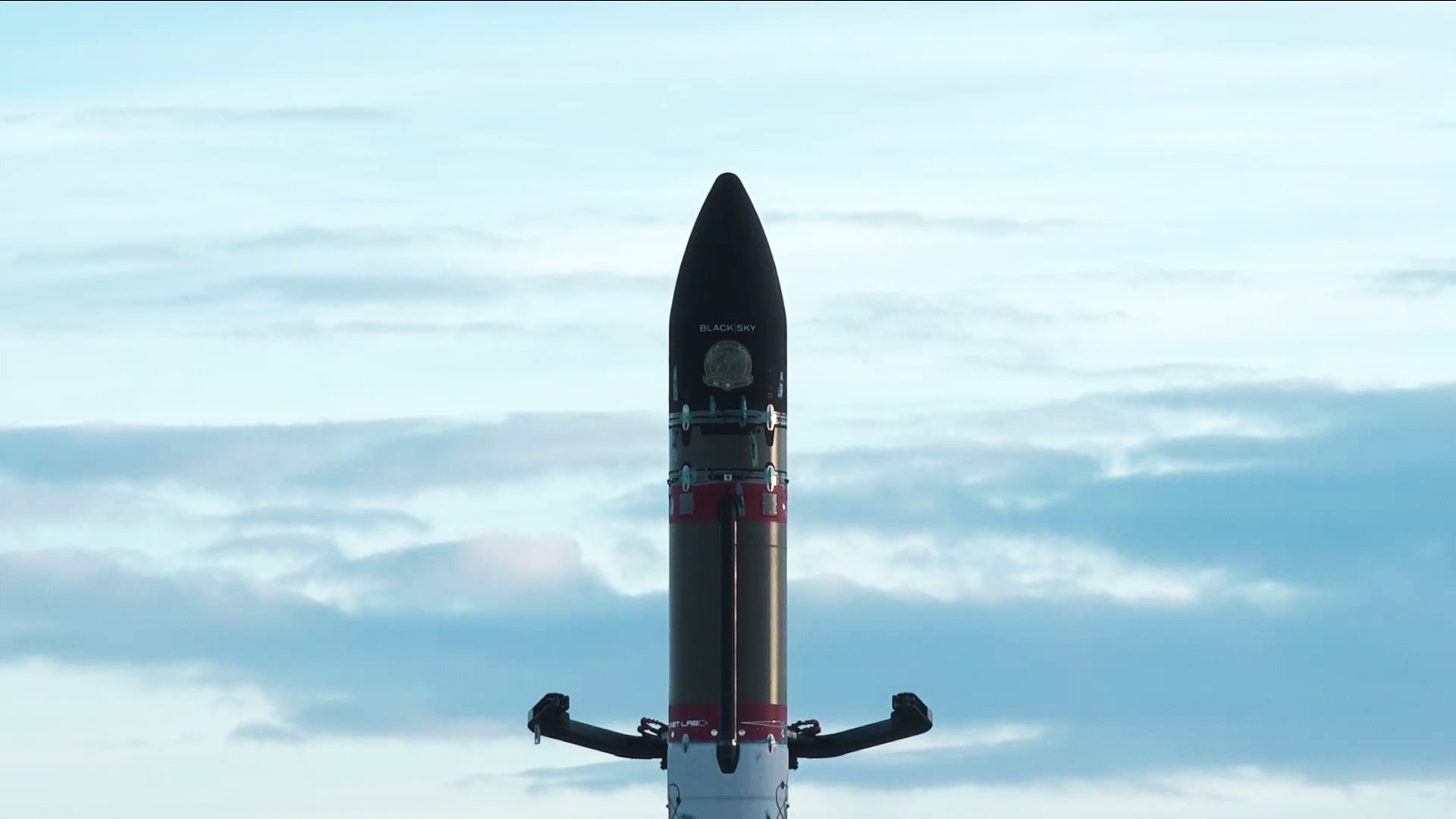
Rocket Lab ha perdido hoy un cohete Electrón por tercera vez en su historia en la misión bautizada como Running Out Of Toes. El problema se produjo segundos después de la separación de la primera y la segunda etapa. Se ve...

Después de muchos meses de rumores Rusia, a través de su agencia espacial Roscosmos, ha confirmado los nombres de la actriz y el director que rodarán la película Вызов (El desafío) a bordo de la Estación Espacial Internacional (EEI); también ha...

Hello, #Mars!Watch: Simulated landing of China's first Mars probe #Tianwen1 #Zhurong pic.twitter.com/1bwa5CBnD1— CGTN (@CGTNOfficial) May 15, 2021 El rover Zhurong de la misión china Tianwen–1 se ha posado en Marte de una pieza esta pasada noche. China se convierte así en el...

Mission navigation has received confirmation of burn cutoff. #OSIRISREx is headed home with a souvenir of rocks and dusts from a 4.5-billion-year-old asteroid! #ToBennuAndBack pic.twitter.com/BmaK1dkPDB— NASA Solar System (@NASASolarSystem) May 10, 2021 Después de algo más de dos años en órbita alrededor...

Usando sus ratos libres un grupo de personas que trabajan en el Centro Europeo de Operaciones Espaciales (ESOC) de la Agencia Espacial Europea ha hecho una curiosa versión de Bohemian Rhapsody de Queen. Eso sí, hay que ser un tanto friki...

Los del Saturday Night Live tienen sketches cada vez más currados; tanto que casi parecen películas. En este –largamente esperado– que se emitió hace unos días los protagonistas son Pete Davidson, Elon Musk y Miley Cyrus. Es una divertida historia sobre...

Hace unas horas SpaceX ha lanzado un nuevo lote de satélites Starlink. El Falcon 9 en el que viajaban los puso en órbita sin problemas. Con esto van 1.625 lanzados, lo que hace que desde hace tiempo SpaceX sea la mayor...

Ingenuity tras su quinto vuelo visto por la cámara Mastcam-Z de Perseverance – NASA/JPL-Caltech/MSSS El helicóptero Ingenuity ha llevado a cabo su quinto vuelo en Marte sin problemas. En él se alzó a una altura de 10 metros –es complicado que pueda...

Blue Origin acaba de anunciar que el primer vuelo tripulado de un cohete New Shepard tendrá lugar el 20 de julio de 2021. No es una fecha escogida al azar –o al menos no lo parece– ya que si no hay...

En una retransmisión en directo épicamente mala para los estándares habituales de SpaceX pudimos ver como el Starship SN15 no sólo sobrevivía a su primer vuelo sino que además aterrizaba con éxito sin explotar después. Es un gran logro para SpaceX,...

La Resilience tras el amerizaje – NASA Después de 168 días en el espacio la Crew Dragon Resilience amerizaba en el Golfo de México en la mañana del 2 de mayo de 2021 –de noche aún en los Estados Unidos– poniendo fin...

Just another day on Mars, shooting video of a flying helicopter. Quick preview of #MarsHelicopter’s Flight 4 takeoff below; more pics and video yet to come. Typical photographer: lots of gear to juggle and mountains of files to upload! Newest pics at:...
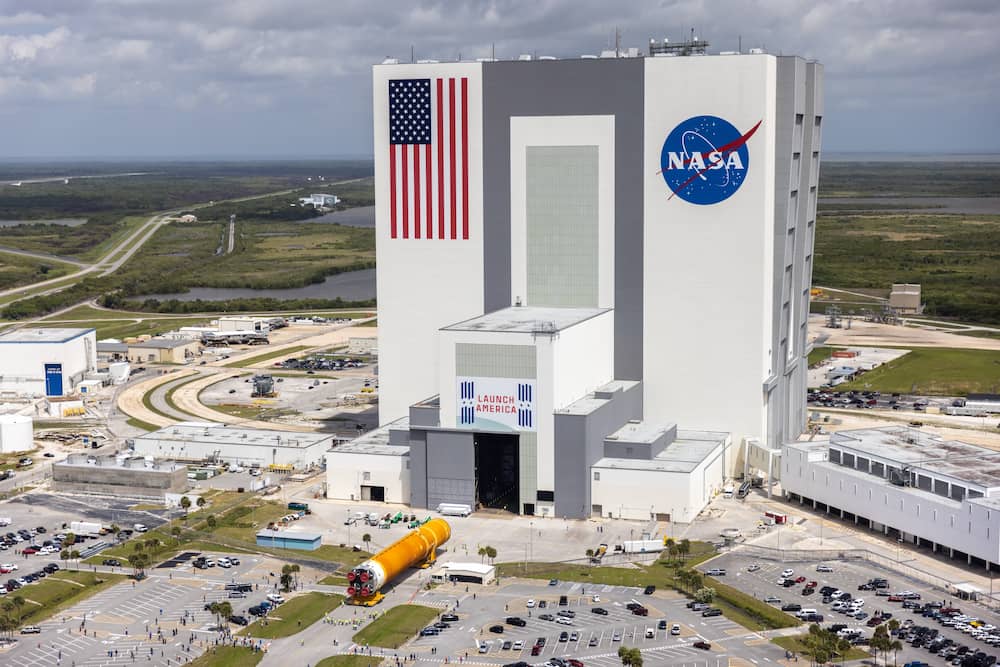
El núcleo central camino del Edificio de Ensamblado de Vehículos (VAB) – NASA Con la llegada del núcleo central del cohete SLS que se usará para la misión Artemisa 1 la NASA ya tiene todos los componentes de esa misión en el...

Ingenuity fotografiado por la MastcamZ de Perseverance – NASA/JPL-Caltech La NASA tenía programado el cuarto vuelo del helicóptero Ingenuity en Marte para el 29 de abril. Pero a la hora de recibie los datos sobre el vuelo el equipo se encontró con...
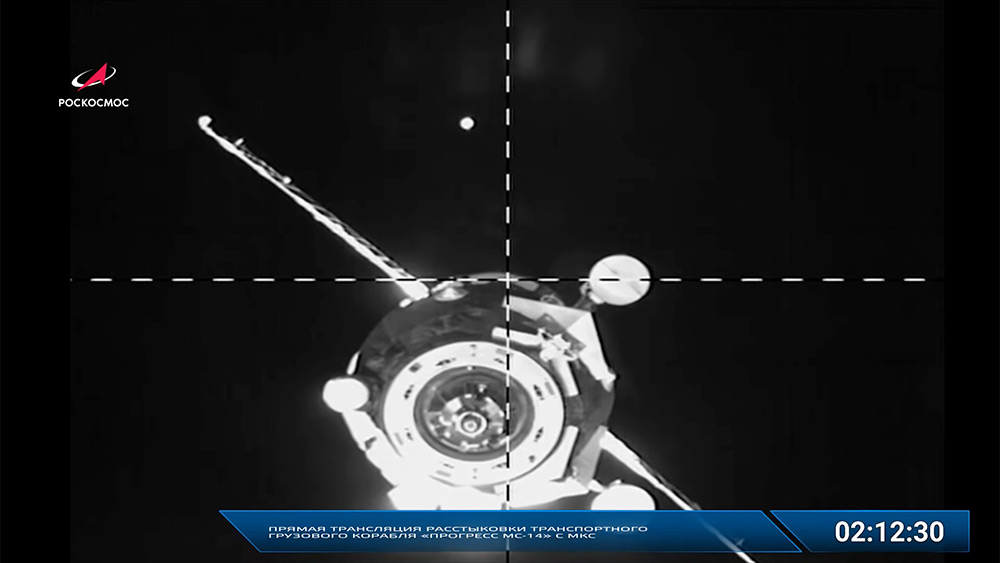
La Progress MS-14 partiendo de la EEI – Roscosmos La cápsula de carga Progress MS-14 terminaba su misión con una reentrada controlada en la atmósfera a las 2:42, hora peninsular española (UTC +2) del 29 de abril de 2021. Desde su lanzamiento...

How the solar arrays are deployed… pic.twitter.com/6DqYM2siQn— C.Yang (@yangchengkai) April 29, 2021 Un cohete Larga Marcha 5B puso en órbita esta pasada noche el módulo Tianhe, el núcleo de la estación espacial china. Se trata de un módulo de 16,6 metros de...

Esta pasada noche Arianespace ha lanzado sin problemas la misión VV18. En ella un cohete Vega puso en órbita el satélite Pléiades Neo 3 junto con los satélites Bravo, ELO Alpha, dos unidades de Lemur-2, y el NorSat-3 como cargas extra....
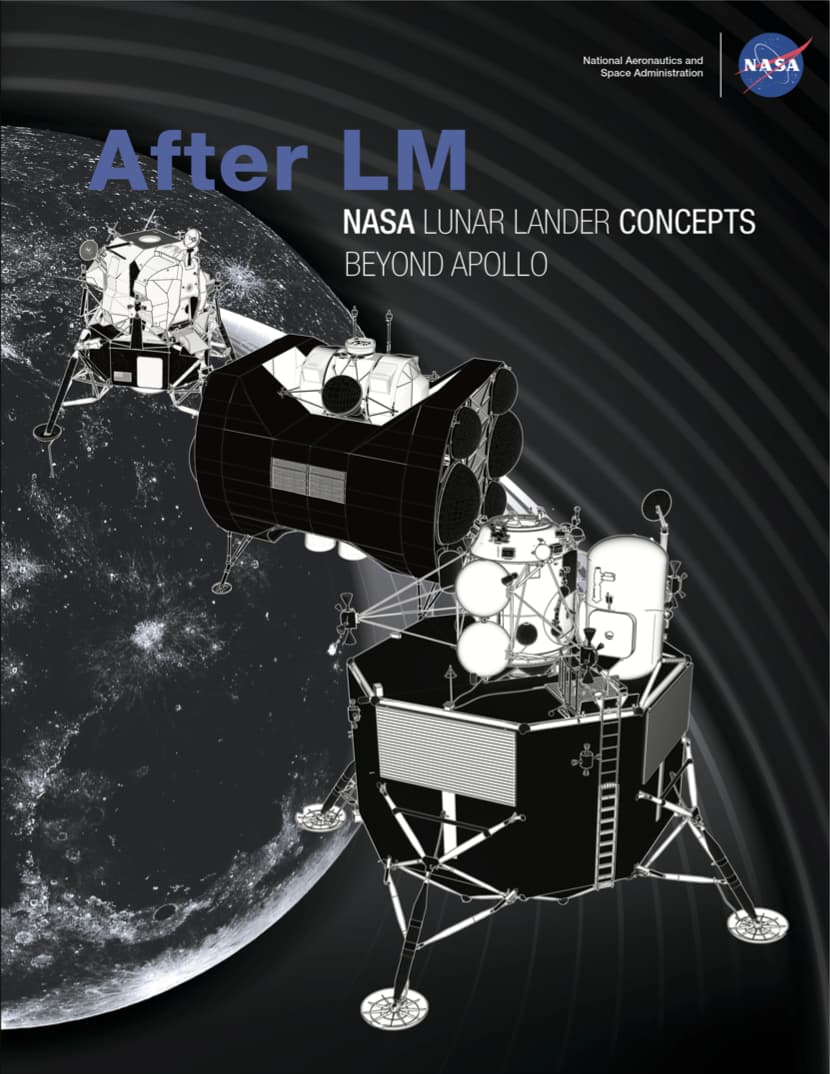
Los primeros –y únicos– módulos lunares que construyó la NASA durante su historia son los del programa Apolo. Pero en los más de 40 años que han pasado desde que terminara no han faltado propuestas para construir otros. After LM - NASA...
Toda la humanidad, menos Michael Collins, está en esta foto – NASA Realmente creo que si los líderes políticos del mundo pudieran ver su planeta desde una distancia de, digamos, 100.000 millas, su perspectiva cambiaría fundamentalmente. La tan importante frontera se volvería...

Nuestro amigo Gali nos ha pasado un enlace a este vídeo subido no hace mucho por el Computer History Archives Project. En él se pueden ver imágenes tomadas en 1970 de una de las dos Mission Operations Control Room (MOCR, Salas...

Impresión artística de una astronauta de la NASA en la Luna – NASA Igual que hace con los lanzamientos de sus misiones –tampoco le queda otro remedio mientras no tenga un cohete propio– la NASA ha pensado que puede ser una buena...

Impresión artística de Zhurong en Marte – CNSA/CLEP China ha anunciado que finalmente el rover que ha enviado a Marte en la misión Tianwen 1 se llamará Zhurong (también escrito a veces Zhu Rong). Es el dios del fuego de la mitología...
MOXIE durante su instalación en Perseverance – NASA/JPL-Caltech Además del éxito hasta ahora de la campaña de vuelos de Ingenuity, el helicóptero de la misión, la misión Mars 2020 se ha apuntado recientemente otro éxito: el experimento MOXIE que Perseverance lleva a...

Un nuevo lanzamiento desde el cosmódromo de Vostochny ha puesto en órbita el sexto lote de satélites de la constelación que OneWeb está construyendo para dar acceso a Internet en cualquier lugar del mundo. De nuevo llevó a cabo el lanzamiento...

Este fin de semana el helicóptero Ingenuity de la misión Mars 2020 de la NASA ha hecho su tercer vuelo en Marte. Como estaba programado desde el principio si todo iba bien cada vuelo es un poco más atrevido que el...

Pues ya se ha terminado la segunda temporada de Para toda la humanidad (For All Mankind), disponible en Apple TV+. Y ya me ha le visto enterita, claro. La acción transcurre casi diez años después del final de la primera. El...

Soft capture confirmed! At 5:08am ET (9:08 UT), Crew Dragon Endeavour arrived at the @Space_Station for the second time in its history. Next, the capture hooks will connect the spacecraft to the orbiting laboratory. pic.twitter.com/VdX8VPHeOH— NASA (@NASA) April 24, 2021 Desde hace...

SpaceX ha lanzado hoy su tercera misión tripulada dentro del programa de misiones comerciales de la NASA. Conocida como Crew–2 su objetivo es llevar a la Estación Espacial Internacional a Shane Kimbrough y Megan McArthur de la NASA, Thomas Pesquet de...

Ingenuity en su segundo vuelo visto por la cámara Mastcam-Z de Perseverance – NASA/JPL-Caltech/MSSS El helicóptero Ingenuity, que acompaña al rover Perseverance en su misión en Marte. acaba de hacer su segundo vuelo. Ha sido un poco más completo que el primero:...

Impresión artística de un lanzamiento de satélites Kuiper en un Atlas V – Amazon/ULA Además de SpaceX con su constelación Starlink y de la de OneWeb hay otro gran proyecto en marcha para llevar Internet a todas partes del mundo desde el...

Al final a la NASA le salió bien la jugada de apostar por una modificación en la secuencia de comandos en vez de por modificar el software de a bordo y el helicóptero Ingenuity hizo su primer vuelo en Marte el...
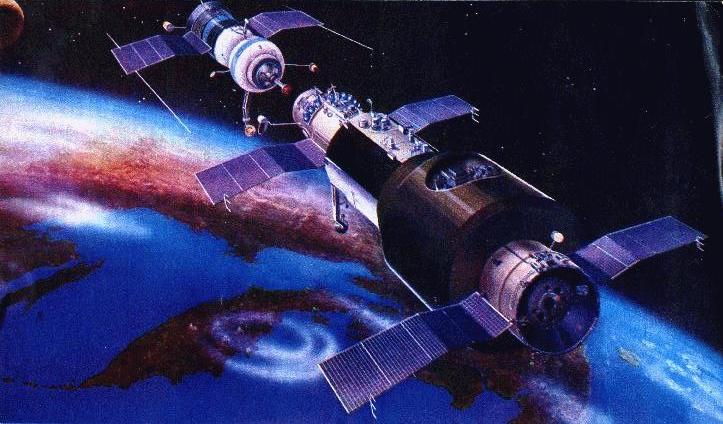
Impresión artística de la Salyut 1, en primer plano, a punto de acoplarse con una cápsula tripulada Soyuz – Roscosmos El 19 de abril de 1971 a la 1:40 UTC un cohete Protón K colocaba en órbita la Salyut 1, la primera...
Ingenuity sobre Marte. Se ven las rodadas de Perseverance tras apartarse de él – NASA/JPL-Caltech La NASA ha anunciado que el helicóptero Ingenuity intentará su primer vuelo en Marte a eso de las 9:30, hora peninsular española (UTC +2) del 19 de...
Impresión artística de una Starliner a punto de atracar en la EEI - Boeing Según se puede leer en NASA and Boeing Targeting August/September for Starliner’s Uncrewed Orbital Flight Test-2 Launch la segunda misión de prueba de una cápsula Starliner de Boeing...
Ingenuity sobre la superficie de Marte ek 16 de abri de 2021 – NASA/JPL-Caltech/ASU Tras el intento abortado de la semana pasada la NASA ha conseguido por fin poner los rotores de Ingenuity a toda velocidad. Este ensayo ocurrió el 16 de...
Impresión artística del aterrizador lunar de SpaceX sobre la Luna – NASA/SpaceX La NASA acaba de anunciar que será SpaceX quien construirá el aterrizador lunar del programa Artemisa. Se impone así a Blue Origin y Dynetics, las otras dos empresas en liza...
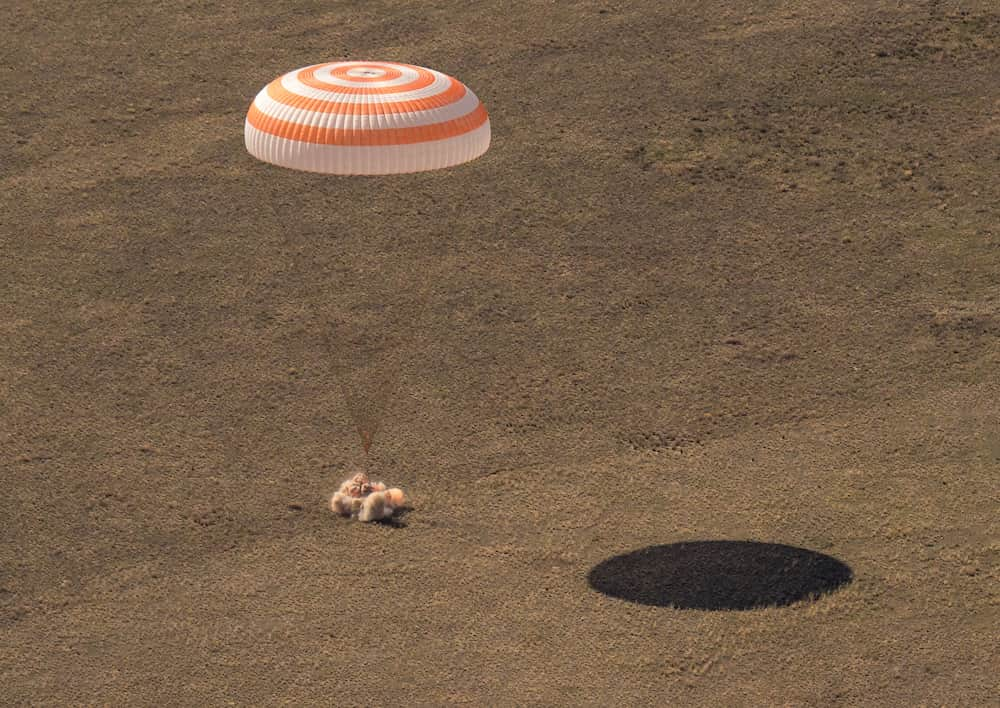
Aterrizaje de la Soyuz MS-17 – NASA/Bill Ingalls Tal y como estaba previsto la cápsula tripulada Soyuz MS-17 aterrizaba esta mañana en las llanuras de Kazajistán, poniendo fin a su misión. A bordo volvían a Tierra Sergey Ryzhikov y Sergey Kud-Sverchkov de...

This is a scaled down copy of the key to the transfer hatches, one of the keys was used by the first ISS expedition about 20 years ago to open the hatches at the station. Now Shannon is responsible for the station...

Blue Origin acaba de llevar a cabo el decimoquinto lanzamiento de un cohete New Shepard. Igual que en todos los anteriores todo ha ido a la perfección y tanto el cohete como la cápsula RSS First Step aterrizaron sin problemas al...

Cada vez es más habitual que los satélites artificiales sobrevivan con creces a su tiempo previsto de funcionamiento. Y muy a menudo si hay que dejar de utilizarlos es porque se quedan sin combustible. Esto obliga o bien a desorbitarlos o...

Ingenuity sobre el suelo de Marte – NASA/JPL-Caltech Tras analizar los datos recibidos después del intento de poner los rotores a 2.500 rpm que terminó antes de lo previsto al detectar los ordenadores de a bordo un problema la NASA ha anunciado...

Poyéjali!– Yuri Gagarin al despegar la Vostok 1 Hoy se cumplen 60 años desde que Yuri Gagarin se convirtiera en la primera persona en salir al espacio a bordo de la Vostok 1. Por una curiosa carambola cósmica se cumplen también 40...
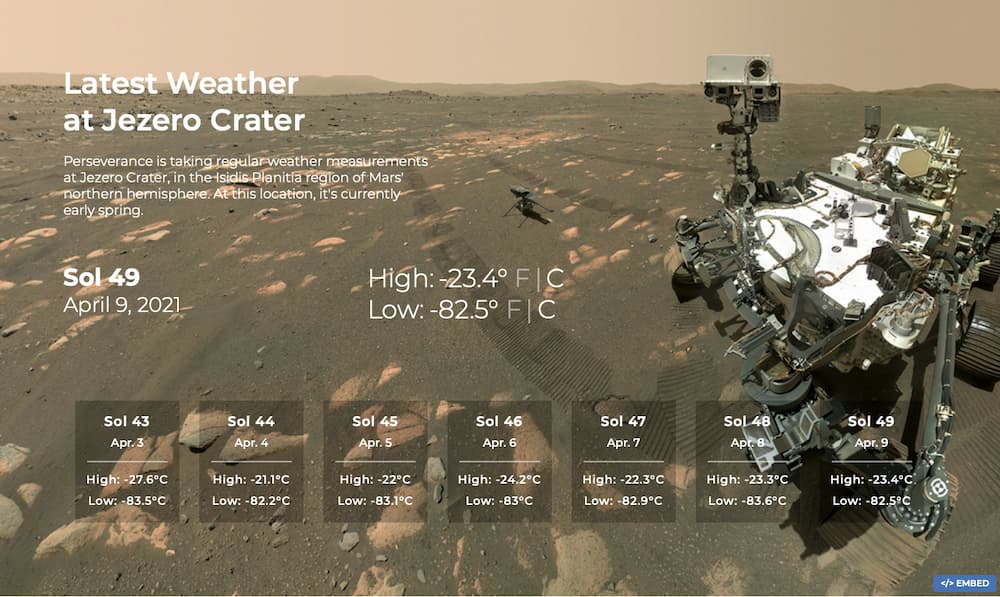
Información meteorológica desde el cráter Jezero – NASA/JPL-Caltech/CAB(CSIC-INTA) La NASA acaba de poner en marcha la página Latest Weather at Jezero Crater. En ella se puede ver la información meteorológica correspondiente al cráter Jezero de Marte. Es dónde están el rover Perseverance...
Wiggle, wiggle, wiggle With just a little bit of swing, the #MarsHelicopter has moved its blades & spun to 50 rpm in preparation for first flight! Takeoff is slated for April 11, with confirmation expected overnight into April 12 for us Earthlings....

Space was her passion since childhood... Nora AlMatrooshi, the new member of the UAE Astronaut Programme.#UAEAstronauts #UAEAstronautProgramme@Astronaut_Nora @TheUAETRA pic.twitter.com/TEW5uip0EK— MBR Space Centre (@MBRSpaceCentre) April 10, 2021 Los Emiratos Árabes Unidos acaban de hacer público el nombre de las dos nuevas incorporaciones a...
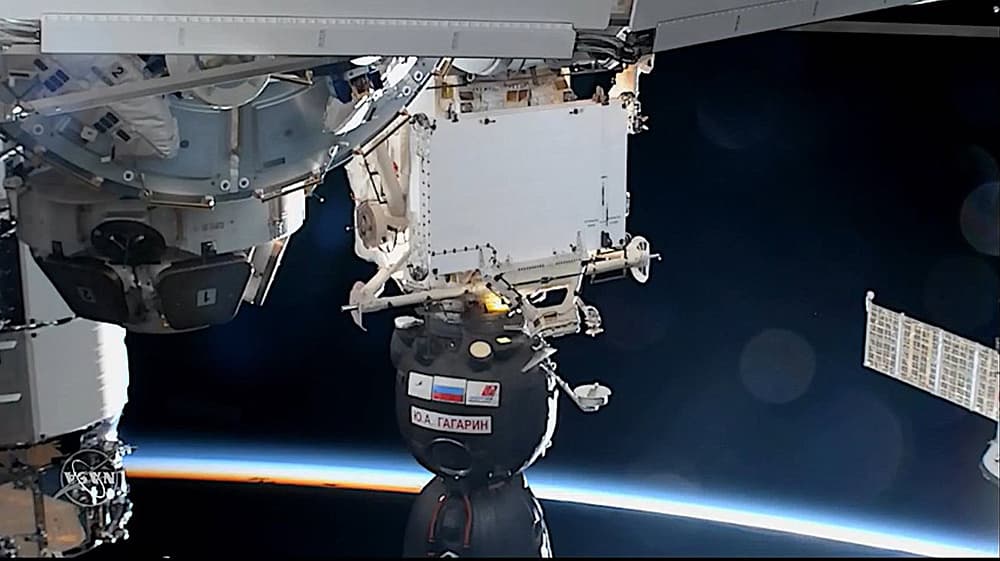
Atraque de la Soyuz MS-18 – NASA TV / ShuttleAlmanac Tras despegar a las 9:44, hora peninsular española (UTC +2), de la plataforma 31 del Cosmódromo de Baikonur la cápsula tripulada Soyuz MS-18 «Yuri Gagarin» se acoplaba al módulo Rassvet de la...

El pasado 30 de marzo el Staship SN11 de SpaceX explotó en el aire poco antes de aterrizar tras haber llevado a cabo un vuelo hasta los 10 kilómetros de altitud. Según Elon Musk la explosión fue debida a una fuga...
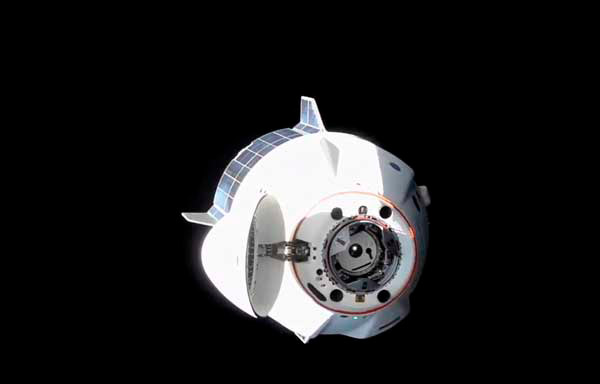
Resilience, the @SpaceX #CrewDragon vehicle, moved to a nearby station port today to prepare for upcoming Crew and Cargo Dragon missions. https://t.co/PX4M8dqtrI pic.twitter.com/pi4JLn3iY8— International Space Station (@Space_Station) April 5, 2021 La tripulación de la Crew Dragon Resilience se subió esta mañana a...
Ingenuity sobre Marte. Se ven las rodadas de Perseverance tras apartarse de él – NASA/JPL-Caltech Este pasado fin de semana el helicóptero Ingenuity se posó por primera vez sobre la superficie de Marte. Aunque no fue tras un vuelo sino después de...
A veces creo que hay vida en otros planetas y a veces pienso que no. En cualquiera de los dos casos, la conclusión es asombrosa. – Arthur C. Clarke ¿Estamos solos? En busca de otras vidas en el Cosmos. Por Carlos Briones....
La Estación Espacial Internacional vista desde la Soyuz MS-08 con Zvezda en primer plano – NASA/Roscosmos En septiembre de 2019 los instrumentos de a bordo detectaron una pequeña fuga de aire en la Estación Espacial Internacional. Pero como no suponía ningún peligro...
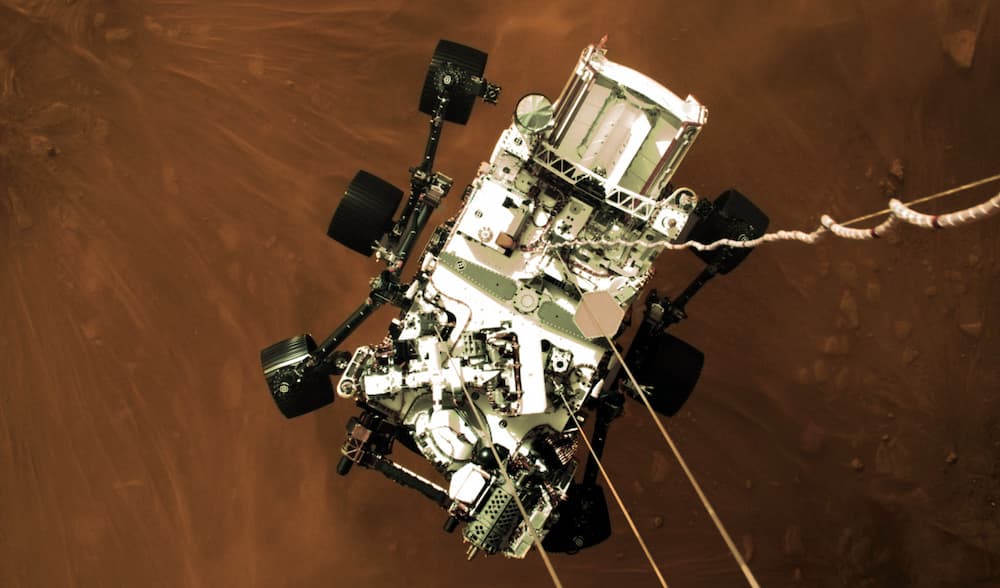
Número de identificación de vehículo de Perseverance – NASA/JPL-Caltech ADN explorador en Perseverance – NASA/JPL-Caltech La NASA ha revelado hoy los dos últimos huevos de pascua enviados a Marte con el rever Perseverance de los que no había dicho nada hasta ahora....
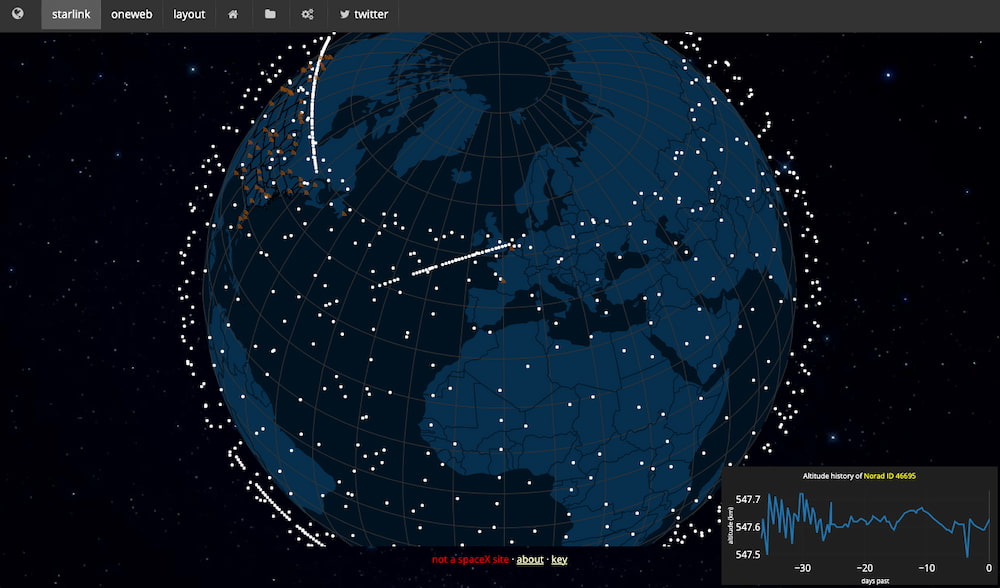
En SatelliteMap.Space se pueden ver en tiempo real los más de 1.300 satélites que ha lanzado Starlink en los últimos años junto con datos como su posición exacta, altitud, visibilidad y demás¹. Se puede interactuar con el ratón para ver qué...

El VSS Imagine visto desde arriba – Virgin Galactic Virgin Galactic ha presentado en público el VSS Imagine, el primer StarShip III de su flota. Como el nombre del modelo indica es la tercera versión de su avión cohete. Externamente apenas se...

Una Crew Dragon con vistas – SpaceX Hace unas horas se ha presentado a las cuatro personas que van a formar la tripulación de la misión Inspiration4, la primera misión privada al espacio. Si nadie les adelanta, aunque parece poco probable. Son:...
Todavía no hay muchos detalles pero tras despegar entre la niebla la señal de vídeo procedente del Starship SN11 se cortó a los 5:49. El vídeo y también la telemetría. En palabras de John Insprucker: «no va a volver, no esperéis...

Impresión artística de Hope en órbita alrededor de Marte – MBRSC Se ha cumplido otro hito importante en la misión de la sonda Hope de los Emiratos Árabes Unidos: ya está en su órbita de trabajo prevista alrededor de Marte. Esto es...

Un Photon en primer plano frente a a la segunda etapa de un Electrón - RocketLab Hace un par de días Rocket Lab lanzó su cohete Electrón número 19. A bordo iban seis satélites para varios clientes. Todos fueron colocados en órbita...
Despegue del cohete – OneWeb Un cohete Soyuz-2.1b ha puesto en órbita un lote de satélites de OneWeb despegando desde el cosmódromo de Vostochny en la mañana del 25 de marzo de 2021. Con esto la empresa tiene ya 146 satélites en...

Galaxia M106 / NGC 4258 – Imagen: KPNO/NOIRLab/NSF/AURA / PI: M.T. Patterson (New Mexico State University); procesamiento de imagen: T.A. Rector (University of Alaska Anchorage), M. Zamani y D. de Martin Esta espectacular foto de la Galaxia espiral Messier 106 (NGC 4258)...

Deployment of 60 Starlink satellites confirmed pic.twitter.com/Xcbrq66Mez— SpaceX (@SpaceX) March 24, 2021 A las 9:28, hora peninsular española (UTC +1), del 24 de marzo de 2021 SpaceX puso en órbita un nuevo lote de satélites Starlink. Para ello utilizó un Falcon 9...

Ingenuity, el helicóptero que ha llegado a Marte con el rover Perseverance, acaba de estrenar blog, como en los viejos buenos tiempos de la web 2.0 y esas cosas. Su primera entrada se titula How is the Weather on Mars? Y...

GK Launch Services, que es la división comercial de Glavkosmos, a su vez una subsidiaria de Roscosmos, la Agencia Espacial Federal Rusa, acaba de hacer su primer lanzamiento comercial dedicado. Hasta ahora había gestionado lanzamientos de oportunidad en los que se...
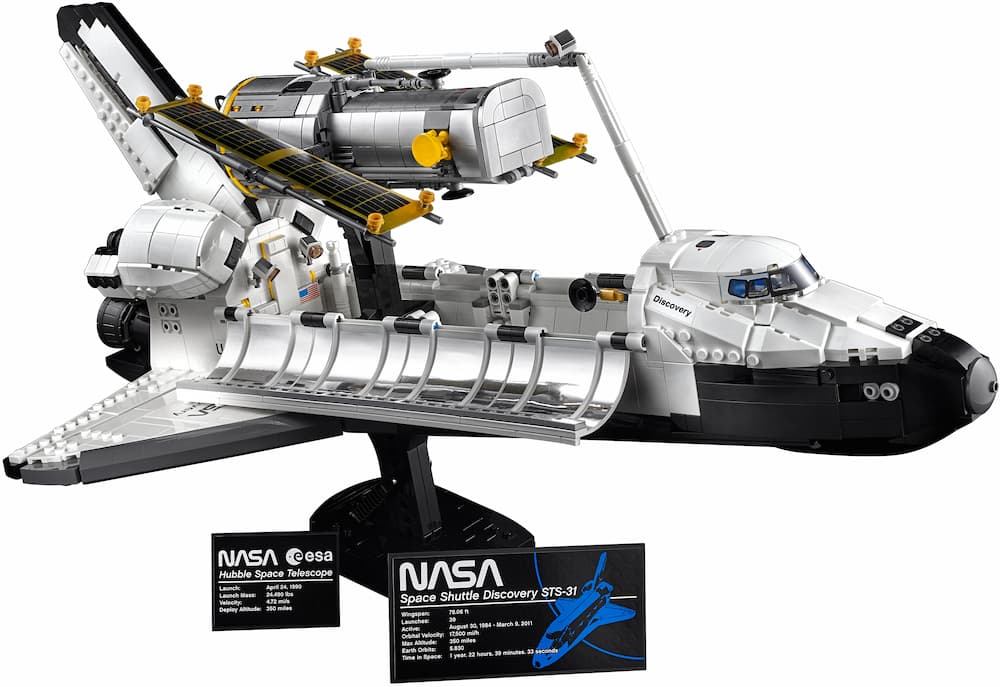
El Discovery y el Hubble – Lego A partir del próximo 1 de abril de 2021 se puede comprar el set de Lego que trae el transbordador espacial Discovery y el telescopio espacial Hubble. Reproduce la configuración de la misión STS-31, que...

La EEI vista desde arriba desde la Soyuz MS-17 – Sergey Kud-Sverchkov/Roscosmos Esta semana nos ha dejado una nueva imagen de la Estación Espacial Internacional (EEI) vista desde un ángulo poco habitual. Se trata de una foto tomada por Sergey Kud-Sverchkov a...

Pues por fin Boeing y la NASA han conseguido que el núcleo central del cohete SLS pase su prueba de encendido. 499,6 segundos de encendido de sus cuatro motores Aerojet Rocketdyne RS-25 así lo atestiguan. Eso son algo más de ocho...
Hear that? That’s the sound of me driving over Martian rocks. This is the first time we’ve captured sounds while driving on Mars.Read full story: https://t.co/oqdnCJShjm pic.twitter.com/yKwypUSnE7— NASA's Perseverance Mars Rover (@NASAPersevere) March 17, 2021 Ya que Perseverance ha conseguido por fin...

Si no hay más imprevistos Boeing y la NASA llevarán a cabo hoy la segunda prueba de encendido del cohete SLS de la NASA. El objetivo es comprobar que el núcleo central del cohete funciona como debe durante un lanzamiento pero...

La Cygnus 15 a punto de ser capturada por el brazo robot de la Estación Espacial Internacional – Soichi Noguchi Una de las cargas que iban a bordo de la cápsula de carga Cygnus 15 S.S. Katherine Johnson era el primer satélite...

El núcleo del Halley visto por la Halley Multicolour Camera (HMC) de la sonda Giotto – ESA/MPAe Lindau En la noche del 13 al 14 de marzo de 1986 la sonda Giotto de la Agencia Espacial Europea se aproximó hasta una distancia...

SpaceX ha conseguido lanzar y recuperar por novena vez la misma primera etapa de un Falcon 9. Es la primera vez que consigue tal cosa. En concreto se trata de la primera etapa B1051. Esta primera etapa ya había lanzado la...

China launched its Long March-7A Y2 carrier rocket on Friday from Wenchang Spacecraft Launch Site in S China's Hainan. The satellite will be mainly used for in-orbit tests of new technologies including space environment monitoring. pic.twitter.com/LQXWyPw5go— China Science (@ChinaScience) March 12, 2021...
Just prior to SN11 being placed onto the launch mount, SpaceX employees lowered down each and every landing leg. Testing them, so unlike during the SN10 flight; they will hopefully deploy properly this time. pic.twitter.com/LJVl6zpnmo— Austin Barnard (@austinbarnard45) March 9, 2021 Un...

Booster stacking complete. #Artemis | @NASA_SLS | @NASA_Orion | @NASAKennedy | @NASAArtemis pic.twitter.com/APirxNQ6VE— NASA's Exploration Ground Systems (@NASAGroundSys) March 9, 2021 El equipo de la NASA en el Centro Espacial Kennedy ya ha terminado de ensamblar los dos cohetes de combustible sólido...
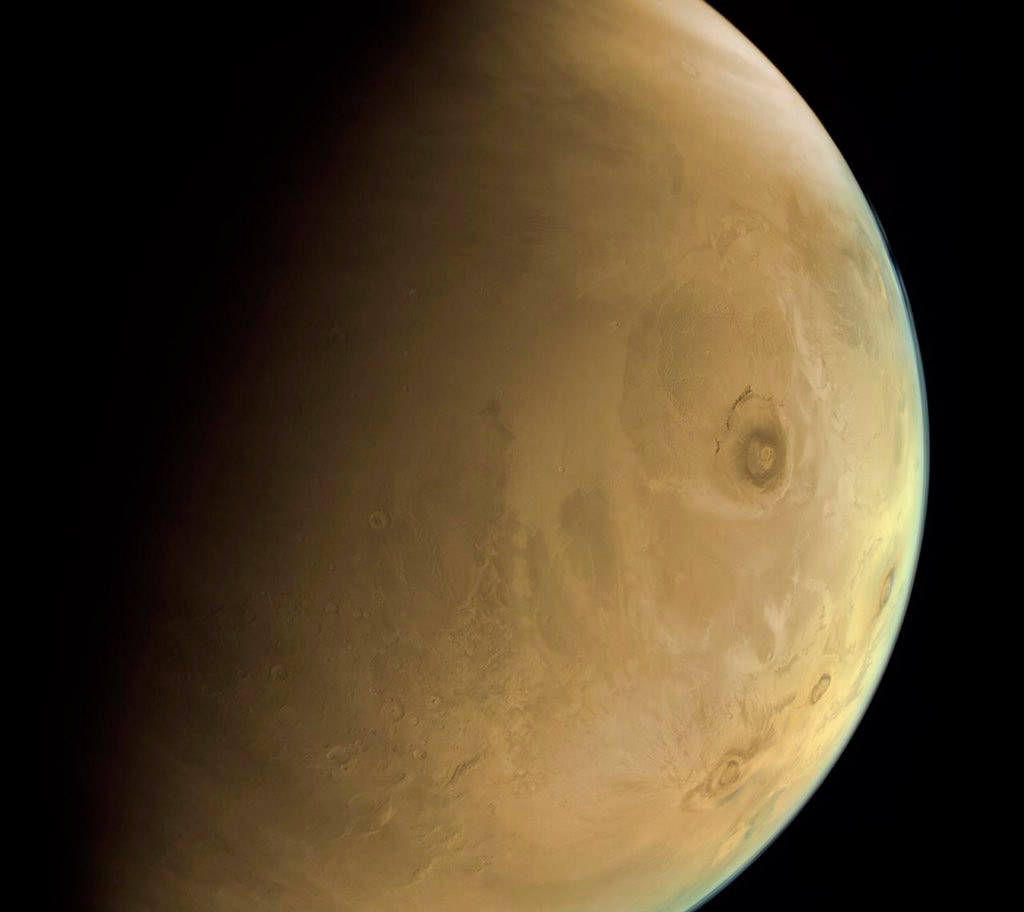
El Monte Olimpo visto por EXI – Hope Mars Mission/EXI El equipo de la sonda Hope de los Emiratos Árabes unidos acaba de publicar tres imágenes que permiten hacernos una idea de cómo ven Marte los tres instrumentos que van a bordo...
Impresión artística de una Starliner a punto de atracar en la EEI - Boeing Boeing no está teniendo nada de suerte con la Starliner, eso está claro. Ya no por el fracaso de su primera mision de prueba, que también, sino porque...
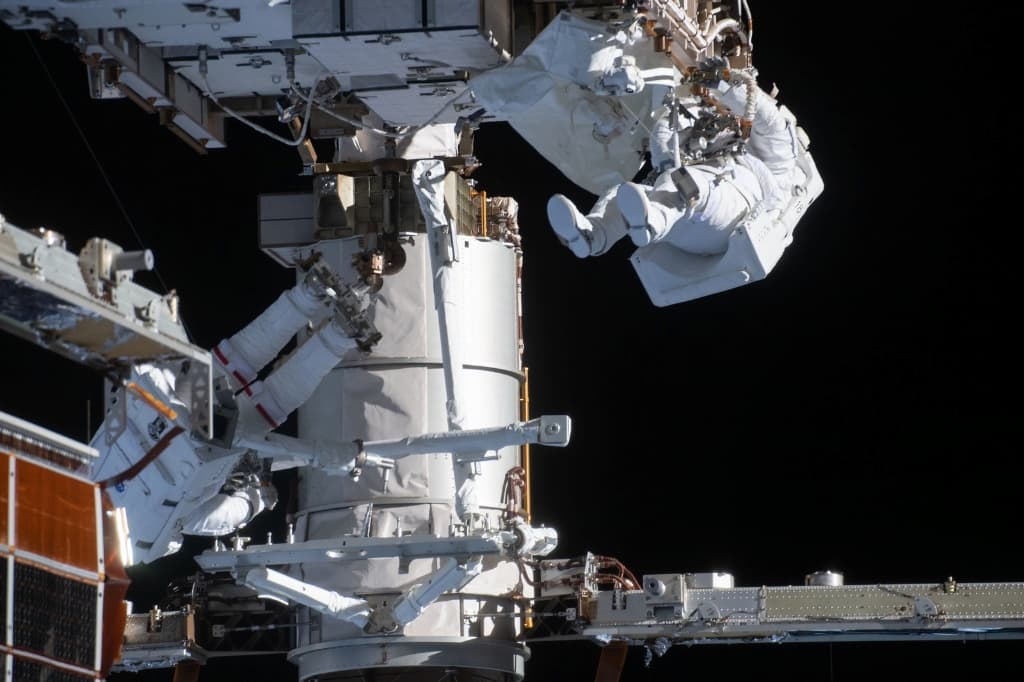
A clear view of both @NASA_Astronauts at the mast canister. They are working to install bracket support struts to the base of the solar array. #AskNASA | https://t.co/cBNqC5JGaz pic.twitter.com/84SKpnWXVD— International Space Station (@Space_Station) February 28, 2021 Esta semana se han llevado a...

Octavia E. Butler Landing – NASA/JPL-Caltech/University of Arizona El destino de la Semilla de la Tierra es echar raíces entre las estrellas. – La parábola del sembrador,Octavia Butler. La NASA ha anunciado que el equipo de la misión ha bautizado el lugar de...

Primeras huellas de Perseverance sobre Marte – NASA/JPL-Caltech Dos semanas después de su llegada a Marte el rover Perseverance de la NASA ha empezado a moverse. Como «primeros pasos» ha avanzado cuatro metros en la dirección en la que había quedado tras...

Esta mañana, con varias semanas de retraso, SpaceX ha lanzado el decimoséptimo lote de satélites Starlink de acceso a Internet, que ya están en órbita camino de sus órbitas de trabajo. Pero lo importante del lanzamiento –aunque oficialmente es un objetivo...

El prototipo Starship SN10 de SpaceX hizo anoche un vuelo hasta los 10 kilómetros de altitud, igual que en su momento hicieron los SN8 y SN9. Pero a diferencia de estos el SN10 consiguió aterrizar de una pieza. Solo que unos...

Los Merlin 1D+ de un Falcon 9 vistos de cerca – SpaceX Durante una presentación sobre el lanzamiento de la misión Crew–2 a la Estación Espacial Internacional Benji Reed, el director de los programas tripulados de SpaceX, explicó la causa del fallo...

Hay que reconocerle ambición a Relativity Space, pues sin haber hecho tan siquiera un lanzamiento de prueba de su Terran 1 acaba de anunciar que han empezado el desarrollo del Terran R. Se trata también de un cohete impreso en 3D...
En 2018 SpaceX hizo público que la persona que en 2017 había comprado un viaje alrededor de la Luna a bordo de una Crew Dragon era el multimillonario japonés Yusaku Maezawa. Pero para cuando esto se hizo público la idea ya...

Rocket Lab, la empresa detrás del pequeño pero matón Electrón, acaba da anunciar que va a desarrollar un nuevo cohete llamada Neutrón*. Aunque llegue después en realidad va a ser el «hermano mayor» del Electrón pues supera con creces su tamaño...

En estas últimas horas Brasil y Rusia han lanzado los satélites de observación medioambiental Amazônia 1 y Arktika-M 1. El primero ha sido puesto en órbita por un cohete indio PSLV-DL; el segundo por un Soyuz-2-1b con una etapa superior Fregat. Amazônia...
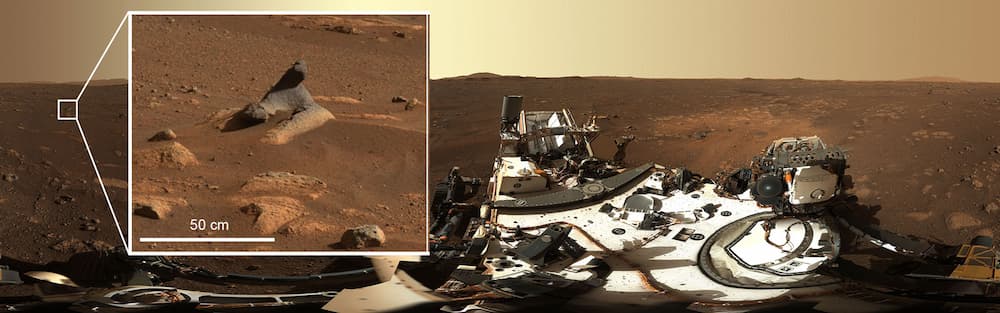
Uno de los muchos detalles visibles en el panorama – NASA/JPL-Caltech/MSSS/ASU El equipo del Perseverance sigue regalándonos chuches con las que pasar un buen rato. En este caso se trata de un panorama navegable de 360º que es para alucinar. Si buscas...

VSS Unity y VMS Eve en vuelo – Virgin Galactic Lo de Virgin Galactic es el cuento de nunca acabar. En medio de su informe de resultados de 2020 ha deslizado el dato de que hay un nuevo retraso en el inicio...
Hace unos días, al ver el espectacular vídeo del descenso de Perseverance en Marte, nos llamaron la atención los patrones del paracaídas que usó para frenar. Esos patrones, además de servir para cosas ingenieriles como para seguir con más facilidad y...

Blue Origin, la empresa dedicada a los «cobetes» de Jeff Bezos, el fundador de Amazon, acaba de anunciar que el primer lanzamiento de su cohete pesado New Glenn se retrasa hasta el último trimestre de 2022. Por lo menos. El por...

Impresión artística de Tianwen–1 reconociendo la superficie marciana – Corporación de Ciencia y Tecnología Aeroespacial de China (CASC) Tras su maniobra de inserción orbital la misión china Tianwen–1 ha ejecutado varias maniobras de frenado extra para poder entrar en su órbita inicial...
Perseverance llegando a Marte – NASA/JPL-Caltech Sal fuera y mira ese punto rojo pálido. Eso es aquí. Ese es mi hogar. Eso es Marte.Cada rover marciano.Cada helicóptero robot.Cada cráter de impacto lleno de piezas de repuesto de la NASA.Cada soldado del ejército...
Impresión artística de Ingenuity en Marte frente a Perseverance – NASA/JPL-Caltech En medio de toda la emoción por la llegada de Perseverance a Marte y de la presentación del espectacular vídeo de su llegada se nos había pasado el anuncio de que...
Hacia las estrellas (La astronauta nº 1). Por Mary Robinette Kowal. Oz Editorial 2020. 386 páginas. El 3 de marzo de 1952 un meteorito cae en la costa este de los Estados Unidos. Se lleva por delante varias ciudades, entre ellas Baltimore,...
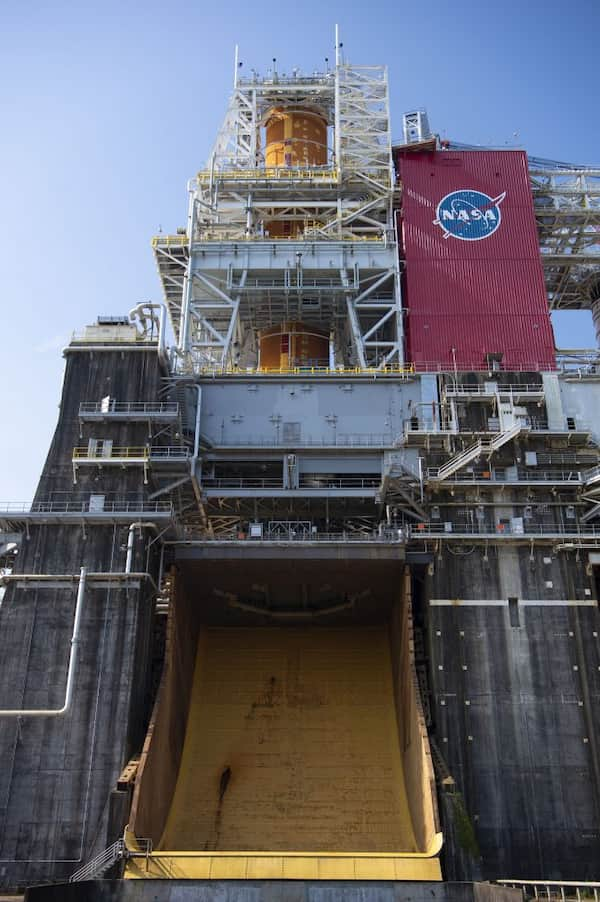
Boeing y la NASA tenían programada para esta semana una segunda prueba de encendido del núcleo central del cohete SLS tras haber fallado la primera de estas pruebas. Pero según se puede leer en Green Run Update: NASA Investigating Valve Performance Before...
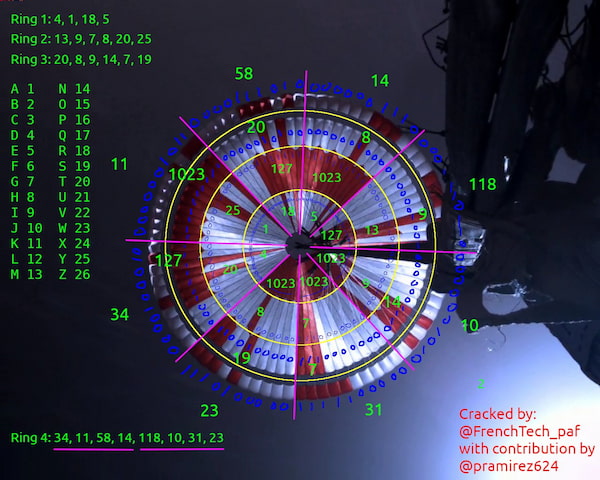
A través de Ablea_Paf y Meithan West he llegado a una explicación sobre lo que significan los patrones de colores que llevaba en paracaídas del Perseverance tal y como pudimos ver ayer en el espectacular vídeo del amartizaje. A simple vista...
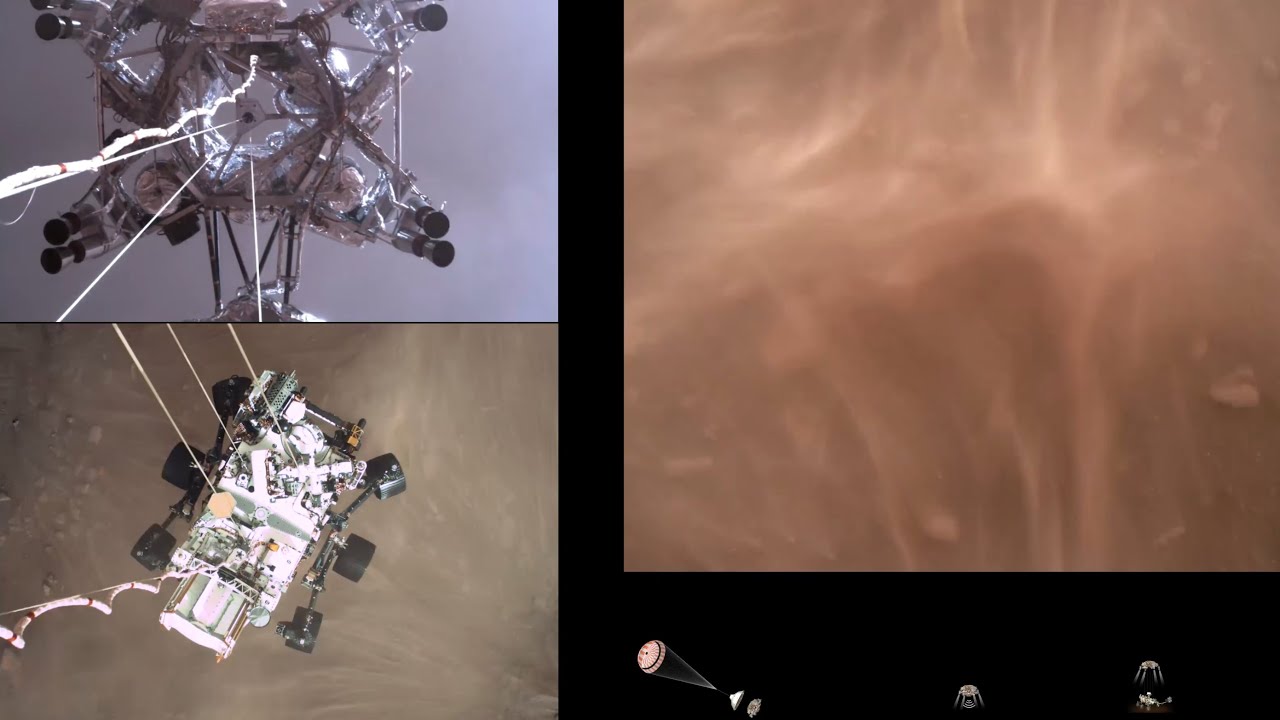
Durante el primer fin de semana de Perseverance en Marte la Red de Espacio Profundo (DSN) de la NASA estuvo ocupada bajando imágenes tomadas durante su descenso. En total hay algo más de 30 GB de datos que incluyen algo más...
La Cygnus 15 a punto de ser capturada por el brazo robot de la Estación Espacial Internacional – Soichi Noguchi Tras un lanzamiento sin problemas el pasado sábado 20 de febrero de 2021 la cápsula de carga Cygnus 15, bautizada S.S. Katherine...

La Starliner antes de ser acoplada a su módulo de servicio – Boeing/John Proferes La fecha para el lanzamiento de la segunda misión de prueba de una Starliner sigue bailando. Y si hace poco Boeing y la NASA anunciaban que se adelantaba...

Este vídeo parece casi ciencia ficción: es un time–lapse de Stargate, la impresora 3D de Relativity Space, mientras imprime la segunda etapa de un cohete Terran 1 que la empresa espera que vuele en 2021. Terran 1 es un cohete de...

The moment that my team dreamed of for years, now a reality. Dare mighty things. #CountdownToMars pic.twitter.com/8SgV53S9KG— NASA's Perseverance Mars Rover (@NASAPersevere) February 19, 2021 La imagen de arriba muestra al rover Perseverance con sus ruedas ya extendidas a un par de...

Ya está disponible en Apple TV+ la segunda temporada de For All Mankind, una de nuestras series favoritas de los últimos tiempos. No recomendamos ver este vídeo si no has visto ya la primera temporada. Como decíamos en su momento, es...
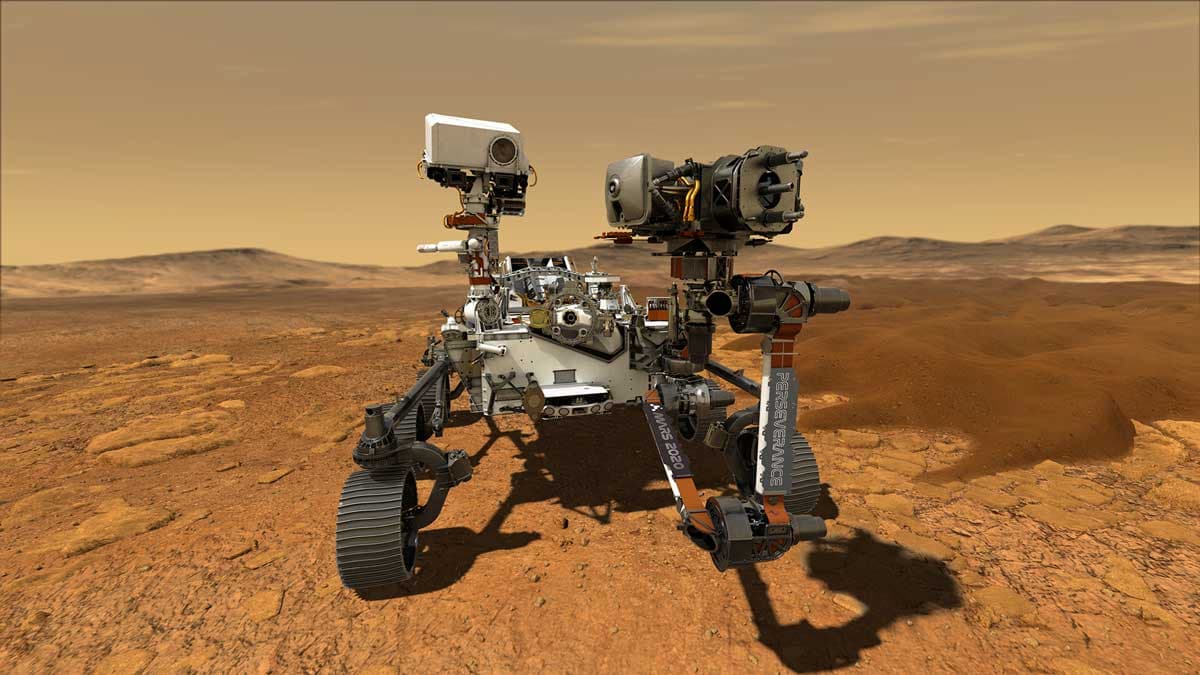
Hello, world. My first look at my forever home. #CountdownToMars pic.twitter.com/dkM9jE9I6X— NASA's Perseverance Mars Rover (@NASAPersevere) February 18, 2021 Perseverance está en Marte. Tras un viaje de siete meses aterrizó sin problemas en el planeta rojo. Tras la llegada también sin problemas...

Lanzamiento de la Progress MS-16 – Roscosmos Tras su lanzamiento el lunes 15 de febrero de 2021 la cápsula de carga Progress MS-16 acaba de atracar en el módulo Pirs de la Estación Espacial Internacional (EEI). Aunque el sistema automatizado falló cuando...

Esta pasada noche SpaceX lanzó un nuevo lote de satélites Starlink. Los 60 satélites del lote 19 fueron colocados en órbita sin ningún problema aparente. Pero la primera etapa del cohete no consiguió llegar de vuelta al espaciopuerto flotante Of Course...
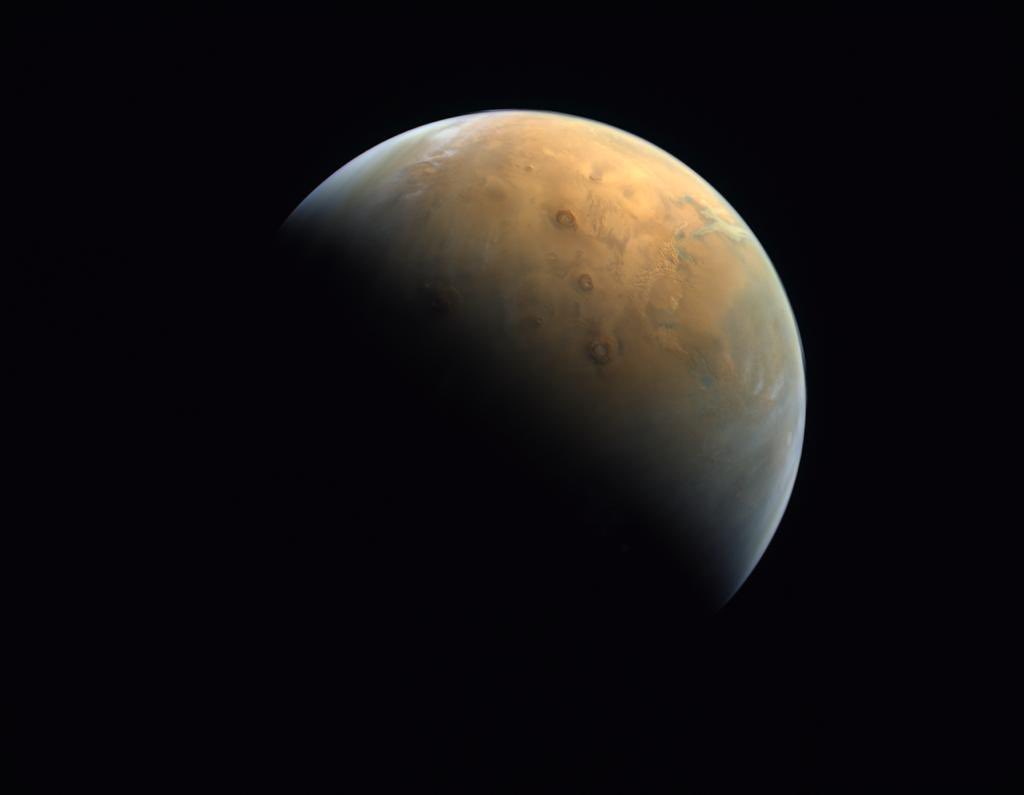
Primera foto de Marte enviada por la sonda Hope – Hope Mars Mission/EXI Esta es la primera foto capturada por la sonda Hope de los Emiratos Árabes Unidos tras su llegada a Marte. Fue obtenida desde una altitud de 24.700 kilómetros por...
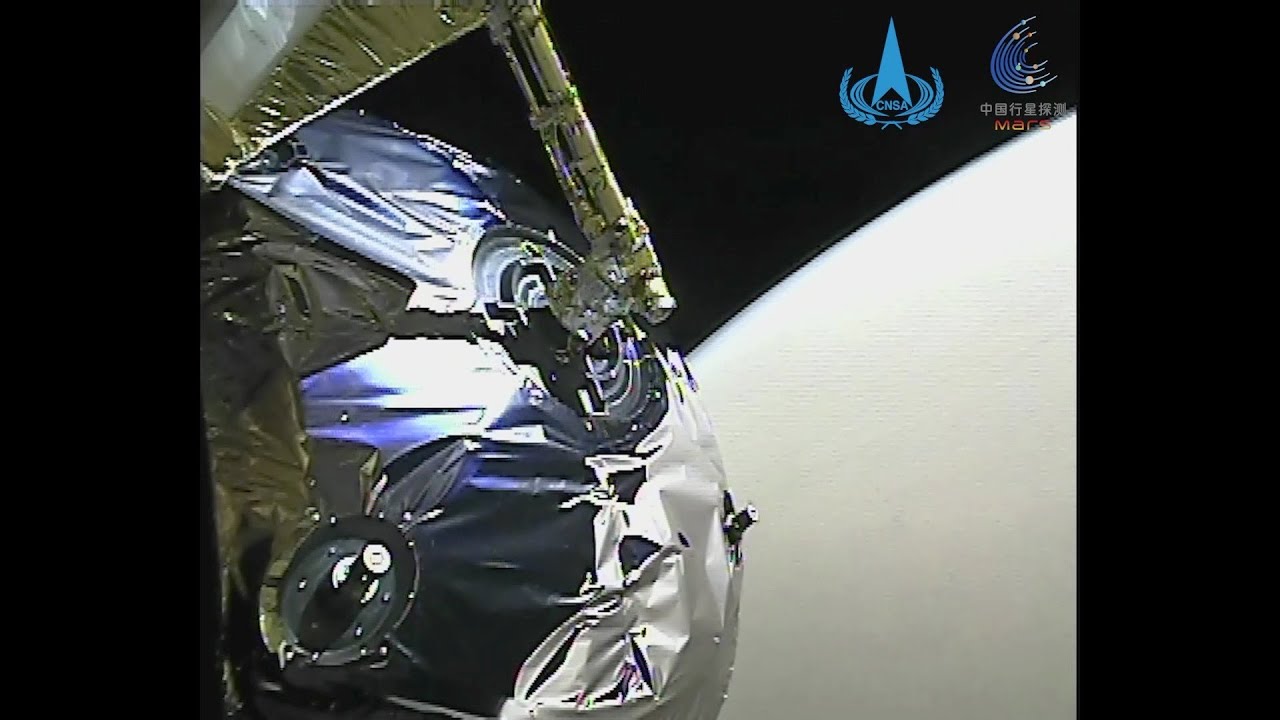
La Administración Espacial Nacional China (CNSA), la NASA china, ha publicado este vídeo con imágenes de la llegada de la misión Tianwen–1 a Marte el pasado miércoles. Está formado por fotos tomadas por dos de las cámaras de ingeniería del orbitador....
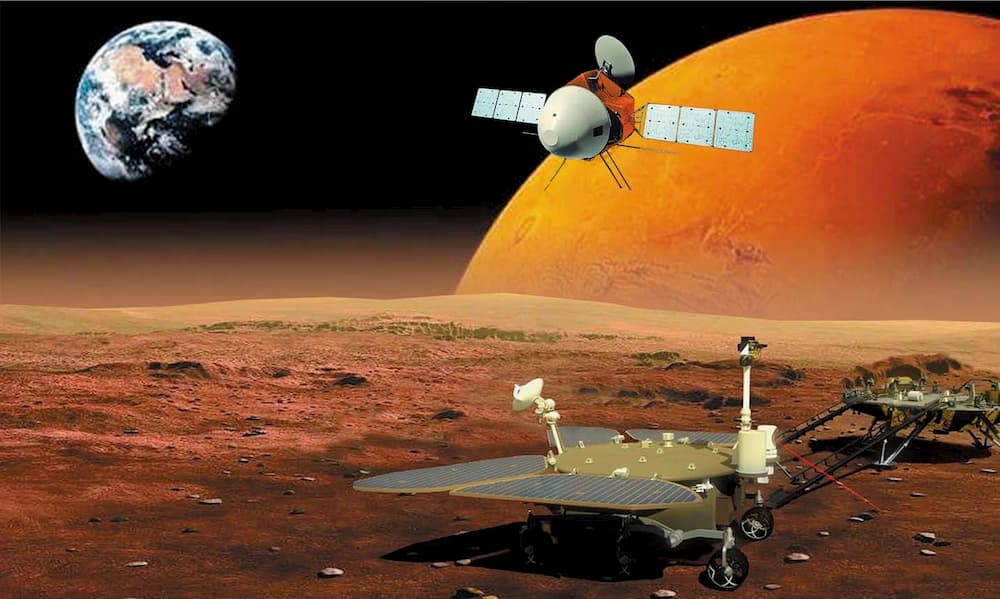
Impresión muy artística de los componentes de la misión – Wan, W.X., Wang, C., Li, C.L. et al. China’s first mission to Mars. Nat Astron 4, 721 (2020) Dos de tres para las misiones enviadas hacia Marte en el verano de 2020:...
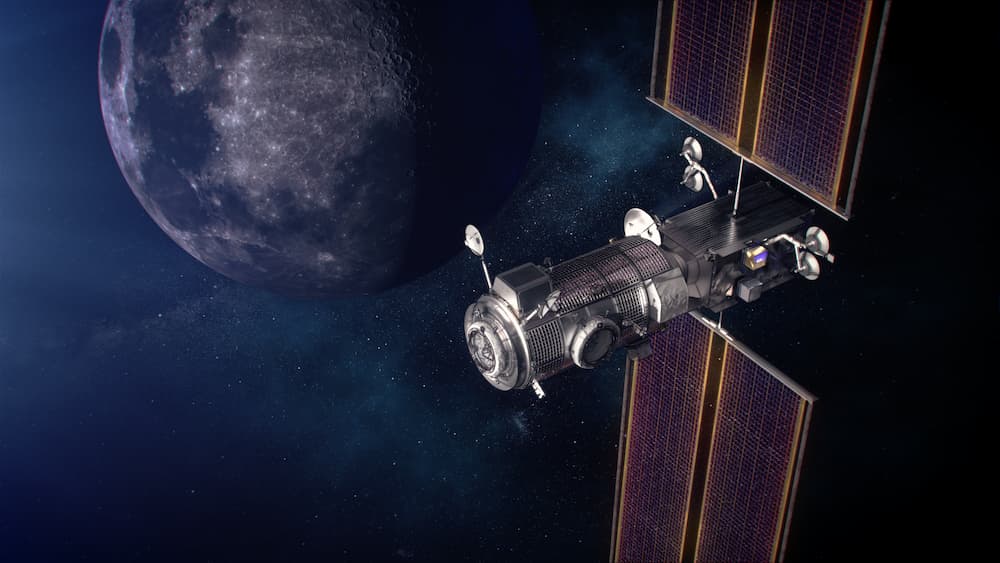
Impresión artística de los dos módulos alrededor de la Luna – NASA La NASA acaba de anunciar que SpaceX lanzará los dos primeros módulos de la estación orbital lunar Gateway. Para ello utilizará una versión modificada del Falcon Heavy con una cofia...
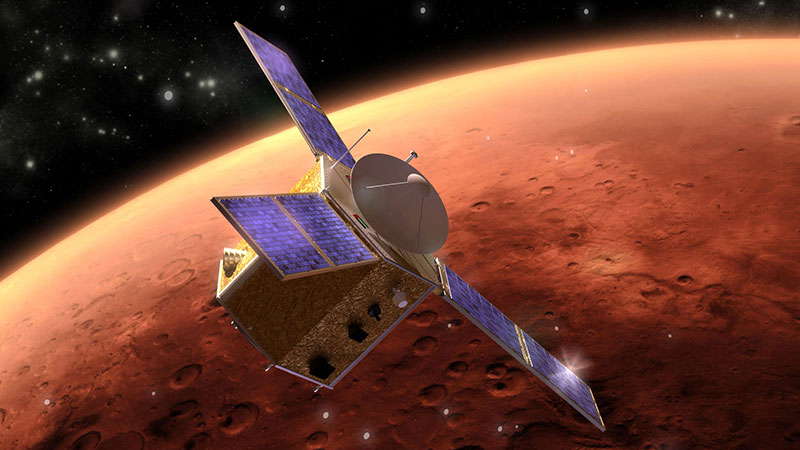
Impresión artística de Hope en órbita alrededor de Marte – MBRSC La maniobra de inserción orbital de la sonda Hope de los Emiratos Árabes Unidos (EAU) se ha desarrollado sin ningún tipo de problema y ya está en órbita alrededor de Marte....
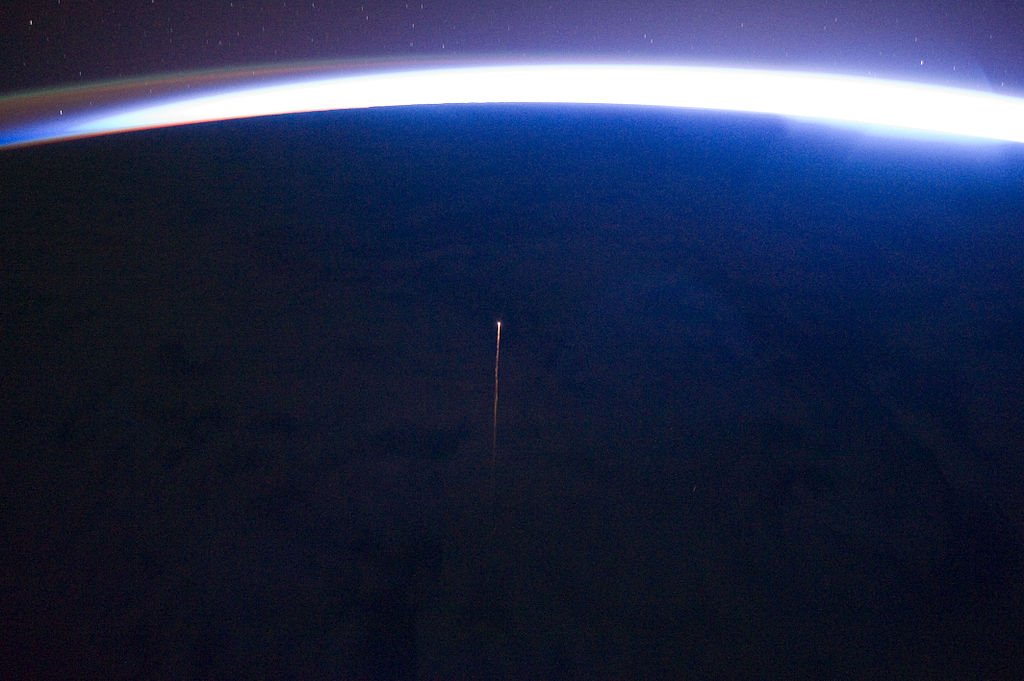
Reentrada de la Progress MS-15, al menos según Roscosmos, aunque no tenemos claro del todo que la imagen se corresponda a lo que dicen – Roscosmos La cápsula de carga Progress MS-15 ha terminado hoy su misión desintegrándose en la atmósfera mediante...
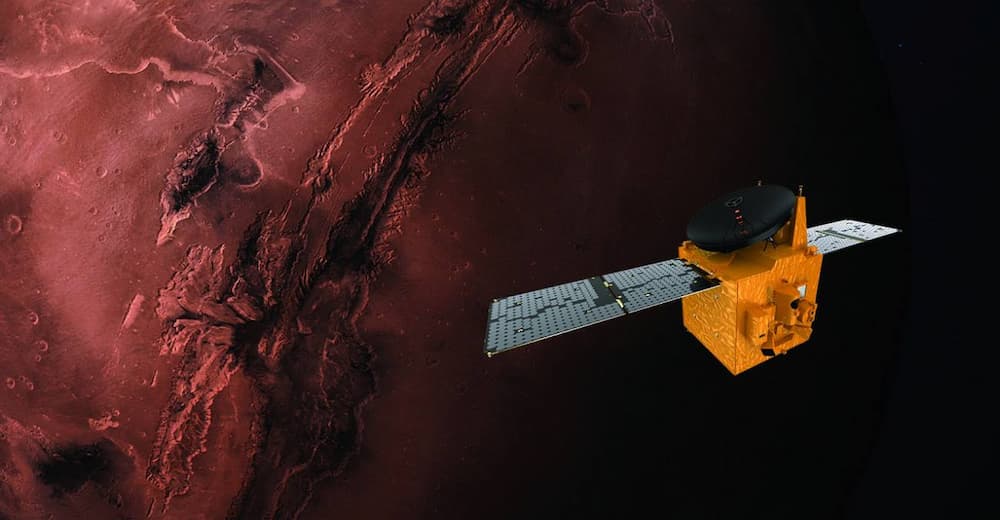
Impresión artística de Hope sobre Marte. Será la primera de las tres en llegar a su destino – MBRSC Entre esta semana y la que viene tres misiones espaciales van a llegar a Marte. Se trata, por orden de llegada de la...

Imagen anunciadora del proceso de selección – ESA La Agencia Espacial Europea (ESA) acaba de anunciar que busca astronautas otra vez. Es la primera vez que lo hace desde 2009 cuando fue seleccionada la promoción conocida como The Shenanigans, formada por Samantha...
La Resilience atracada en la Estación Espacial Internacional – NASA La cápsula tripulada Crew Dragon Resilience acaba de establecer un nuevo récord de permanencia en el espacio para una cápsula estadounidense al superar los 84 días, una hora, 15 minutos y 30...

El primer SLS en el banco de pruebas B-2 del Centro Espacial Stennis – NASA/Robert Markowitz Según se puede leer en Green Run Update: NASA Proceeds With Plans for Second Hot Fire Test la NASA ha decidido que finalmente hará una segunda...

La DSS-56 y Filomena – Madrid DSN La Red de Espacio Profundo (DSN) de la NASA acaba de declarar operativa la antena Deep Space Station 56, o DSS-56, que es la más moderna y capaz de las que dispone en todo el...

Esta mañana SpaceX ha lanzado un nuevo lote de satélites Starlink. De nuevo sin problemas. Y de nuevo ha conseguido recuperar la primera etapa del Falcon 9 que ha utilizado en el lanzamiento, que viajaba por quinta vez al espacio. Así...
El 22 de enero de 2019 el VSS Unity de Virgin Galactic hacía su segundo vuelo al espacio*. Pero desde entonces no habían vuelto a intentar otro hasta el pasado 12 de diciembre, casi dos años después. Y según se puede...

Tras varias semanas de retrasos el Starship SN9 por fin hizo su vuelo hasta los 10 kilómetros de altitud. Y como en el caso de su predecesor el vuelo terminó en un RUD, Rapid Unscheduled Dissasembly, Desensamblado Rápido no Programado, también...

Sé que llego con un par de eones de retraso pero por fin he visto El primer hombre. Me ha parecido mala y no me ha gustado. No tengo nada contra que me gusten películas malas, pero no ha sido el...

Well, this one clearly didn't went in the correct direction right after launch....China's private LSPs are perplexing easy to get to the pad and beyond, but seemingly just as difficult to get to orbit.(https://t.co/RduRvgBOJi) pic.twitter.com/3Q50PuMtcH— Cosmic Penguin (@Cosmic_Penguin) February 1, 2021 El...

Sorprendiendo a propios y a extraños SpaceX acaba de anunciar una misión espacial comercial tripulada que, al menos sobre el papel, arrebatará el título de primera misión espacial comercial tripulada a la de Axiom Space que tiene previsto su lanzamiento a principios...

Glover durante el paseo espacial de la semana pasada. El cilindro que se ve a sus pies es sobre el que rotan los paneles solares. Comparando tamaños se ve que son grandes – NASA En enero de 2017 comenzó la tarea de...
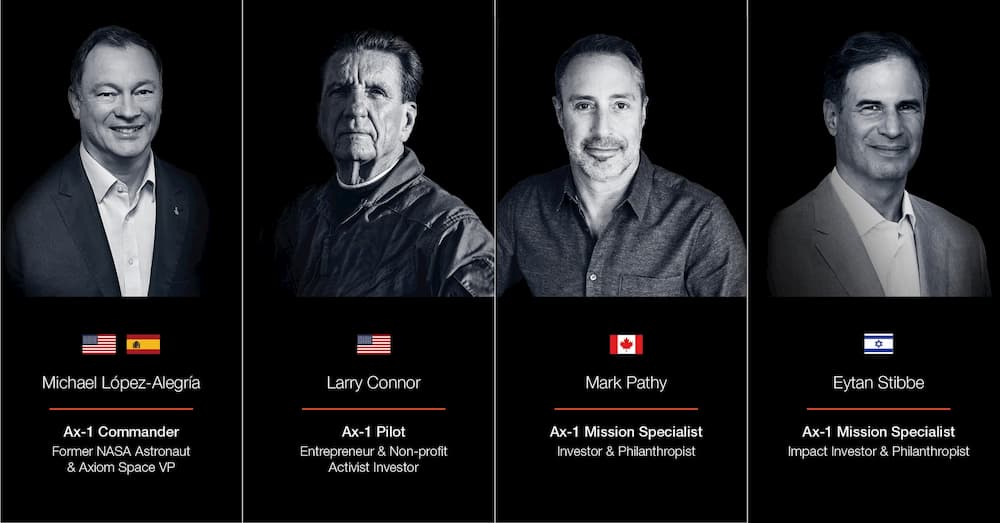
La tripulación de la misión AX–1 – Axiom Space En marzo de 2020 Axiom Space anunciaba un acuerdo con con SpaceX para enviar tres personas durante ocho días a la Estación Espacial Internacional (EEI). Hoy ha publicado los nombres de la tripulación...

Ensamblado de la Starliner para el segundo vuelo de prueba y su módulo de servicio – Boeing/John Proferes En un anuncio poco frecuente en lo que se refiere a una misión espacial la NASA acaba de anunciar que adelanta unos días el...
Impresión artística de Juno en órbita alrededor de Júpiter. En el extremo de uno de sus paneles solares se ve el magnetómetro, uno de los nueve instrumentos que lleva a bordo – NASA/JPL-Caltech/SwRI Dado que Juno sigue funcionando bien y recogiendo valiosos...
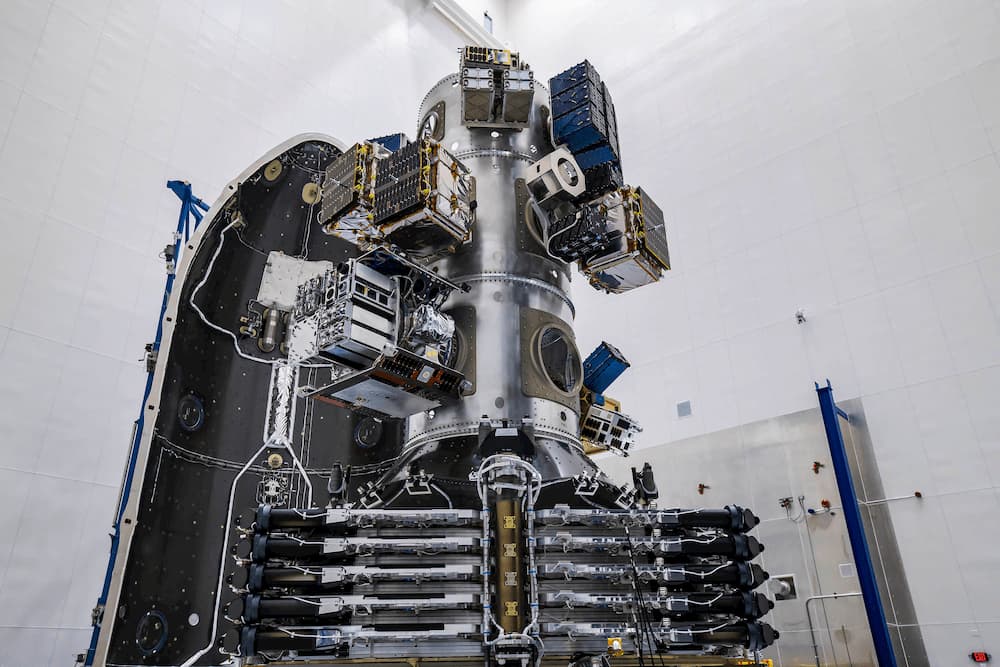
SpaceX acaba de llevar a cabo con éxito el lanzamiento de la misión Transporter–1, la primera de su programa de lanzamientos compartidos para satélites pequeños. Iban a bordo un total de 143 satélites, incluyendo los diez primeros satélites Starlink destinados a...
Impresión artística de InSight en Marte. Frente a ella, a la izquierda, el sismógrafo; a la derecha en sensor de temperatura – NASA/JPL-Caltech Hace unas semanas la NASA anunciaba la extensión de la misión de la sonda InSight en Marte hasta diciembre...

El SLS durante la prueba – NASA Apenas tres días después del fallo de la primera prueba de encendido del cohete SLS la NASA ha desvelado la causa del fallo. Se puede leer en Green Run Update: Data and Inspections Indicate Core...

Falcon 9’s first stage has landed on the Just Read the Instructions droneship! pic.twitter.com/3nh3jongIY— SpaceX (@SpaceX) January 20, 2021 SpaceX acaba de lanzar con éxito un nuevo lote de satélites Starlink. Pero el verdadero interés de la misión estaba en la primera...

Rocket Lab acaba de inaugurar su temporada de lanzamientos de 2021 con el de la misión Another One Leaves The Crust*. En ella un cohete Electrón ponía en órbita con éxito el satélite de comunicaciones GMS-T, un prototipo para una constelación...
Lanzamiento de For Eve, bautizado así en honor a la madre de Richard Branson – Virgin Orbit Pues aunque tardaron lo suyo en confirmar el despliegue de su carga útil a la segunda ha ido la vencida con el cohete LauncherOne de...

Cosmic Girl con el cohete ya bajo su ala – NASA's Launch Services Program Tras un primer lanzamiento fallido en mayo de 2020 Virgin Orbit está lista para llevar a cabo el segundo intento de lanzamiento de su cohete LauncherOne. En realidad,...

Con casi una hora y media de retraso sobre la previsión inicial, lo que es normal porque era la primera vez que se probaban los procedimientos y el cohete, la NASA conseguía por fin encender los cuatro motores de la primera...

Por fin he visto la serie Elegidos para la gloria perpetrada por Disney + y National Geographic, que cubre el periodo desde la selección de los Mercury 7 hasta unas semanas después del vuelo suborbital de Alan Shepard. Vaya desperdicio. Es...

El SLS en el Banco de Pruebas B2 del Centro Espacial Stennis. Es el pepino naranja que se intuye entre los andamios – NASA Con años de retraso –muchos años de retraso– sobre las previsiones iniciales la NASA está lista para hacer...
Stunning views from space today. #NewShepard pic.twitter.com/Q7lFPpieBs— Blue Origin (@blueorigin) January 14, 2021 Blue Origin ha llevado a cabo sin problemas el decimocuarto lanzamiento de un cohete New Shepard. Quizás convenga recordar que se trata de vuelos suborbitales, así que 7 minutos...

España cubierta de nieve por Filomena – contiene datos modificados Sentinel Copernicus (2021), procesada por ESA, CC BY-SA 3.0 IGO Aunque la misión Sentinel 3 del Programa Copernicus tiene como objetivo principal monitorizar los océanos desde el espacio también es capaz de...

The @SpaceX #CargoDragon completed its 36-day stay at the station today after undocking at 9:05am ET. It will splashdown in the Gulf of Mexico late Wednesday. More... https://t.co/I2Ml2IPSuM pic.twitter.com/LvvcLTIMrp— International Space Station (@Space_Station) January 12, 2021 Como es habitual en este modelo...

Madrid cubierta de nieve por Filomena – contiene datos modificados Sentinel Copernicus (2021), procesada por ESA, CC BY-SA 3.0 IGO Aunque estos días hemos visto montones de imágenes de Madrid cubierta por nieve a causa de la borrasca Filomena me faltaba una...

Impresión artística de un satélite artificial con estructura de madera – Sumitomo Forestry Sumitomo Forestry y la Universidad de Kyoto han anunciado que van a trabajar juntas en el desarrollo de satélites artificiales cuya estructura esté fabricada en madera. La idea es...

El primer lanzamiento espacial de 2021 ha corrido a cargo de SpaceX con la puesta en órbita del satélite de telecomunicaciones Turksat 5A. Fue colocado en una órbita de transferencia geoestacionaria por un Falcon 9 cuya primera etapa, la B1060, volaba...

Un grupo de ingenieros de la NASA que en el MundoReal™ trabajan en el equipo de la Estacion Espacial Internacional (EEI) ha diseñado ISS Mimic, un modelo de ella que se puede imprimir en 3D y animar mediante Arduino y unos...

How SpaceX Recovers Falcon 9 after Drone Ship Landings - Port Canaveral Recovery Operations muestra en un vídeo acelerado el proceso mediante el que SpaceX retira la primera etapa de un Falcon 9 para llevarla de nueva a sus instalaciones en...

China launched 39 times in 2020, matching its record set in 2018. CASC, the main space contractor, had stated a goal of ~40 launches and ended up with 34. COVID likely had some, limited impact. This was first time since 2017 that...

La foto con las cenizas de Scotty que se quedó en la EEI – Richard Garriott Richard Garriott, que en octubre de 2008 estuvo a bordo de la Estación Espacial Internacional (EEI) como astronauta privado (AKA turista espacial) acaba de revelar que...

Interior space.. A visual exploration of the international space station. Por Paolo Nespoli y Roland Miller. Damiani, septiembre de 2020. 192 páginas. En 1999 la astronauta Cady Coleman vio unas fotografías de Roland Miller que decoraban los alojamientos de los astronautas en...
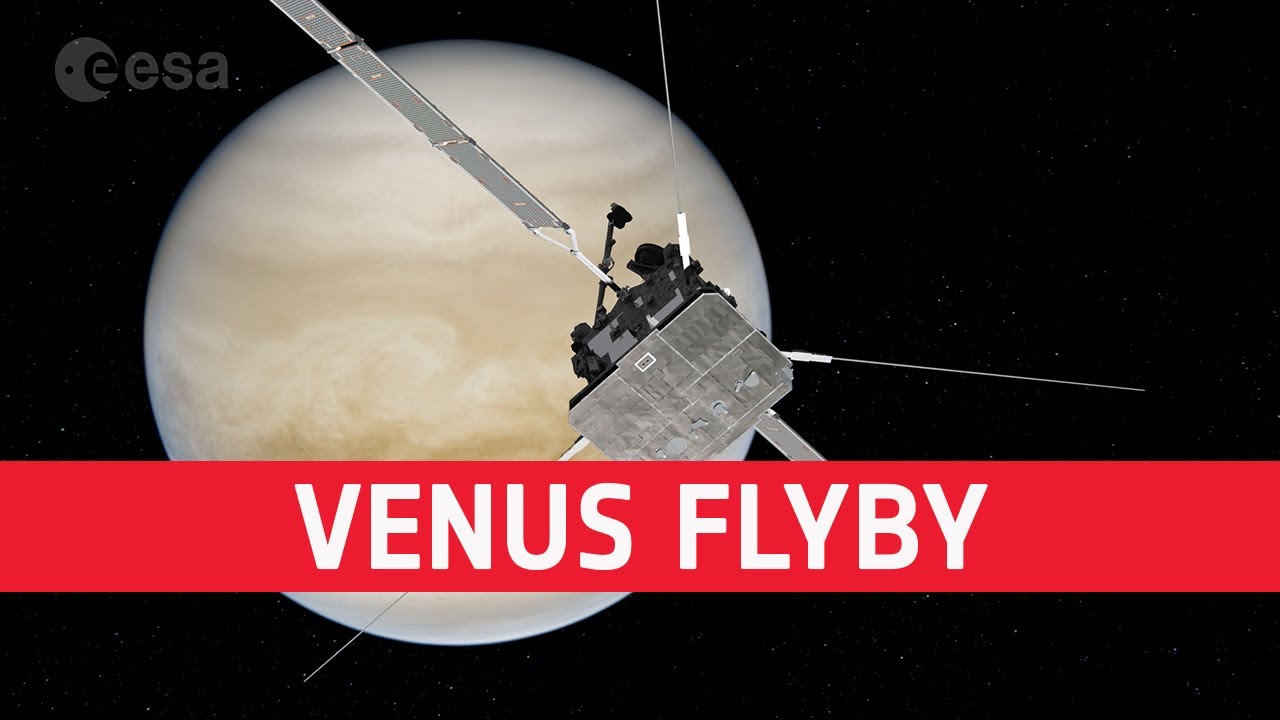
La Solar Orbiter de la Agencia Espacial Europea (ESA) acaba de llevar a cabo sin problemas su primer sobrevuelo de Venus. Sucedió a las 13:39, hora peninsular española (UTC +1) del 27 de diciembre de 2020. Como la distancia a la...
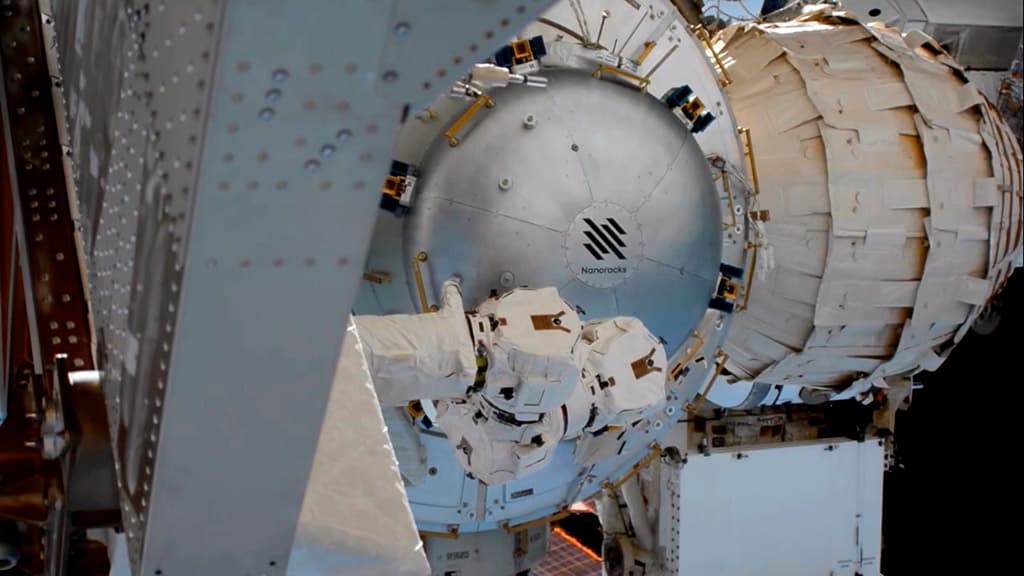
Durante el pasado fin de semana el brazo robot de la Estación Espacial Internacional (EEI), manejado desde tierra, retiró la esclusa Bishop de Nanoracks de la Dragon 21 y la instaló en el módulo Tranquility. Se trata de la primera esclusa...

Despegue del primer Larga Marcha 8 – CNSA La Administración Espacial Nacional China (CNSA) acaba de llevar a cabo con éxito el primer lanzamiento de un cohete Larga Marcha 8. En él puso en órbita cinco satélites. El Larga Marcha 8 es...

El Telescopio Espacial James Webb con su parasol desplegado – NASA/Chris Gunn En una prueba importante de cara a su lanzamiento la NASA y Northrop Grumman –el contratista principal del proyecto– han podido comprobar que el parasol del Telescopio Espacial James Webb...

Footage from a helicopter of Falcon 9‘s 26th and final launch of 2020 pic.twitter.com/Ol90RiJvcP— SpaceX (@SpaceX) December 20, 2020 Hace unas horas SpaceX llevó a cabo su lanzamiento número 26 de 2020, lo que es una cifra récord para la empresa. Supera...

Despegue de la misión – Roscosmos Algo más de ocho meses después de que la empresa se declarara en quiebra y cinco desde que el gobierno del Reino Unido junto con la operadora de telefonía Bharti Global se hicieran con su deuda...

Instalación de la cuarta etapa AVUM en el Vega VV17 - ESA Arianespace acaba de hacer público el resultado del estudio hecho por una comisión independiente acerca del fallo del lanzamiento del cohete Vega que supuso la pérdida del satélite español Seosat...

En la mañana del 15 de diciembre de 2020 Rocket Lab lanzaba su séptimo cohete Electrón del año. Eso marca un récord de lanzamientos para la empresa en un año, superando los seis lanzamientos de 2019. Bautizado como The Owl's Night...

The return capsule of China's Chang'e-5 probe has landed on Earth, bringing back the country's first samples collected from the moon. It marks a successful conclusion of China's current three-step lunar exploration program. #ChangE5 #LunarProbe pic.twitter.com/pezivtpsh9— China Xinhua News (@XHNews) December 16,...

Cámara A de muestras de Hayabusa 2 ya abierta - JAXA No sólo la cápsula que las contenía tenía que llegar de una pieza al suelo, lo que así sucedió el pasado 6 de diciembre de 2020, sino que además había que...

A quick video recap of our 8.5-minute flight to space today! pic.twitter.com/gvElF4fbAZ— Astra (@Astra) December 16, 2020 Con varios días de retraso debido a una meteorología poco colaboradora –a fin de cuentas lanzaban desde Alaska, así que tampoco es de extrañar– Astra...
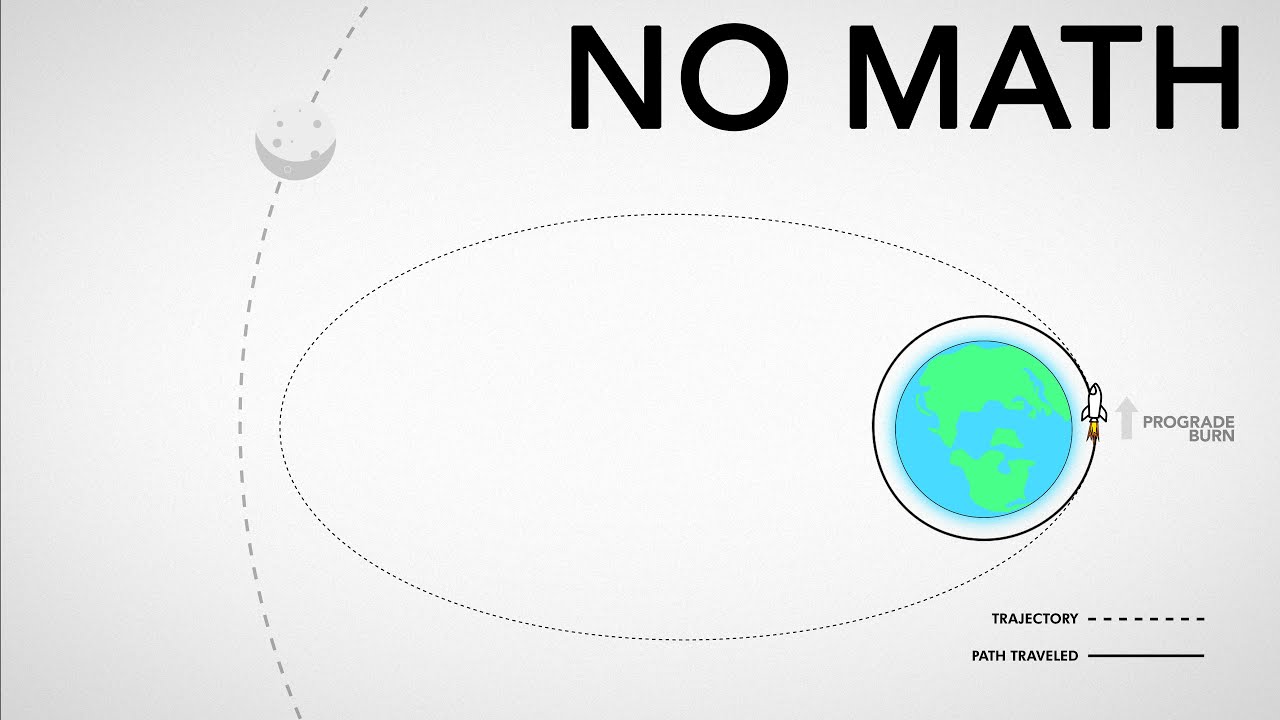
Sin utilizar una sola ecuación y con animaciones fáciles de entender y vídeos de poco más de un minuto, en el canal Exploring Space están dedicando una serie de vídeos a la mecánica orbital. El primero de ellos explica cómo se lanza un cohete para que vaya de la Tierra a la Luna.
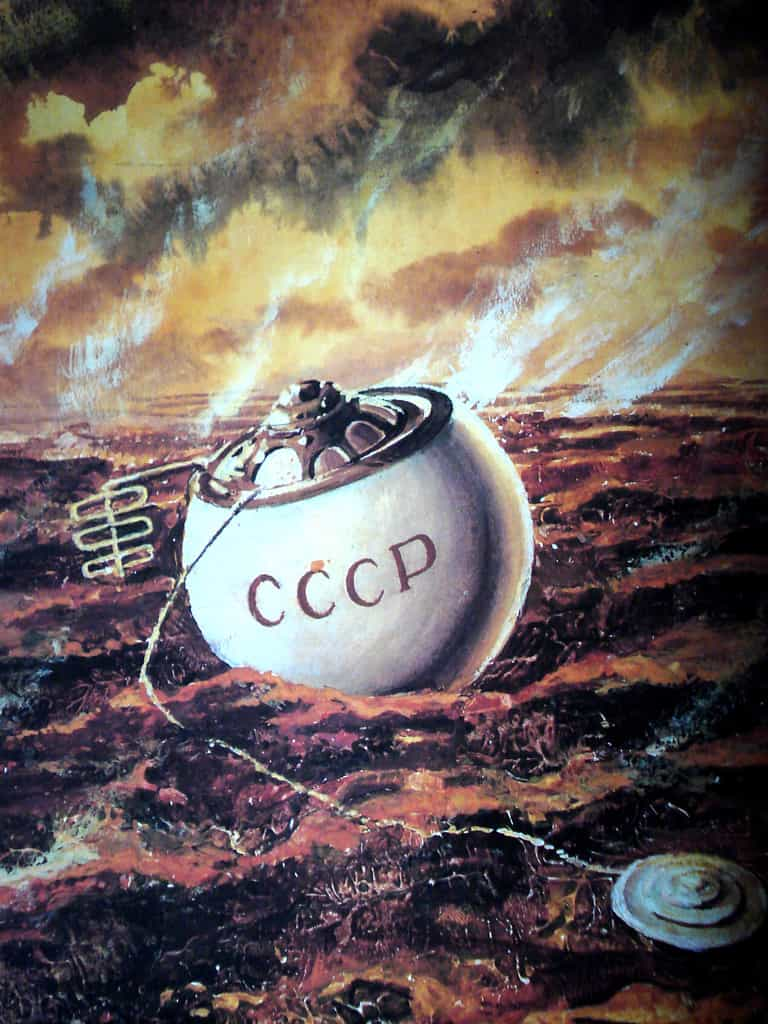
Impresión artística de la Venera 7 sobre la superficie de Venus – Roscosmos Hoy se cumplen 50 años del aterrizaje de la sonda Venera 7 sobre la superficie de Venus. Fue la primera vez que una sonda se posó sobre la superficie...

Lanzamiento del segundo Angará A5 – Roscosmos Casi exactamente seis años después de su primer vuelo de prueba Rusia acaba de hacer el segundo lanzamiento de un cohete pesado Angará A5. Igual que en aquel primer lanzamiento no llevaba ninguna carga útil...

The orbiter-returner combination of China's Chang'e-5 lunar probe conducted its second orbital maneuver on Sunday and entered the moon-Earth transfer orbit. #ChangE5 #LunarProbe pic.twitter.com/hzUTeBeoy2— China Xinhua News (@XHNews) December 13, 2020 La sonda china Chang'e 5 acaba de emprender su camino de...

Some photos from today's aborted @VirginGalactic launch. Glad everyone is ok. This is what testing is for. @NASASpaceflight pic.twitter.com/o4dG3JKHoe— Jack Beyer (@thejackbeyer) December 12, 2020 Virgin Galactic tenía programado para hoy el tercer vuelo «al espacio»* del SpaceShipTwo VSS Unity. Pero tras...
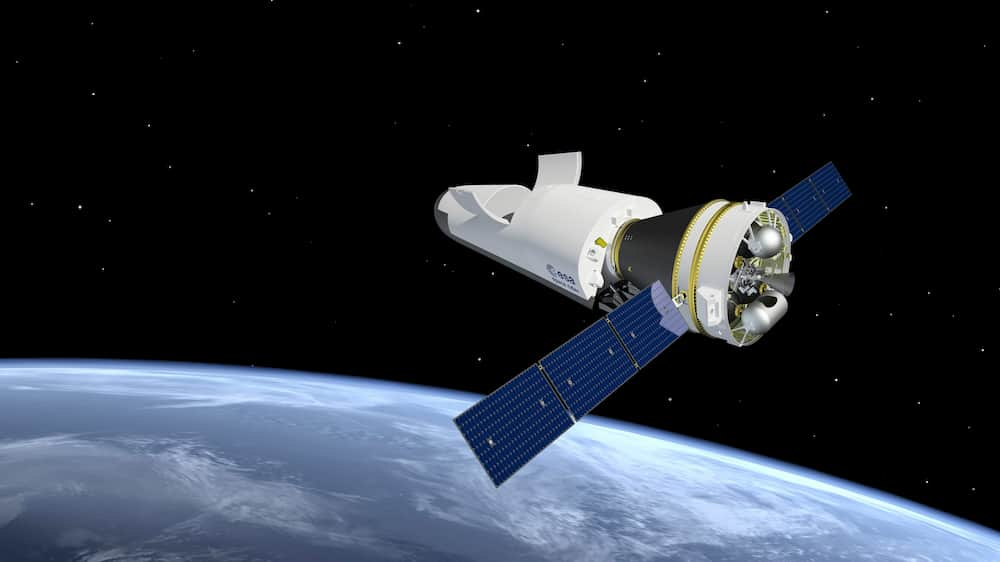
Después de las pruebas hechas con el IXV y de que Thales Alenia Space se encargara de su diseño previo la Agencia Espacial Europea (ESA) acaba de encargar la construcción del Space Rider, su futuro avión espacial reutilizable. Correrá a cargo...
La cápsula que llevará a cabo la misión fue encendida por primera vez hace pocos días – Boeing/NASA Tras el fiasco del primera lanzamiento de prueba de una cápsula Starliner de Boeing en diciembre de 2019 la empresa decidió que iba a...
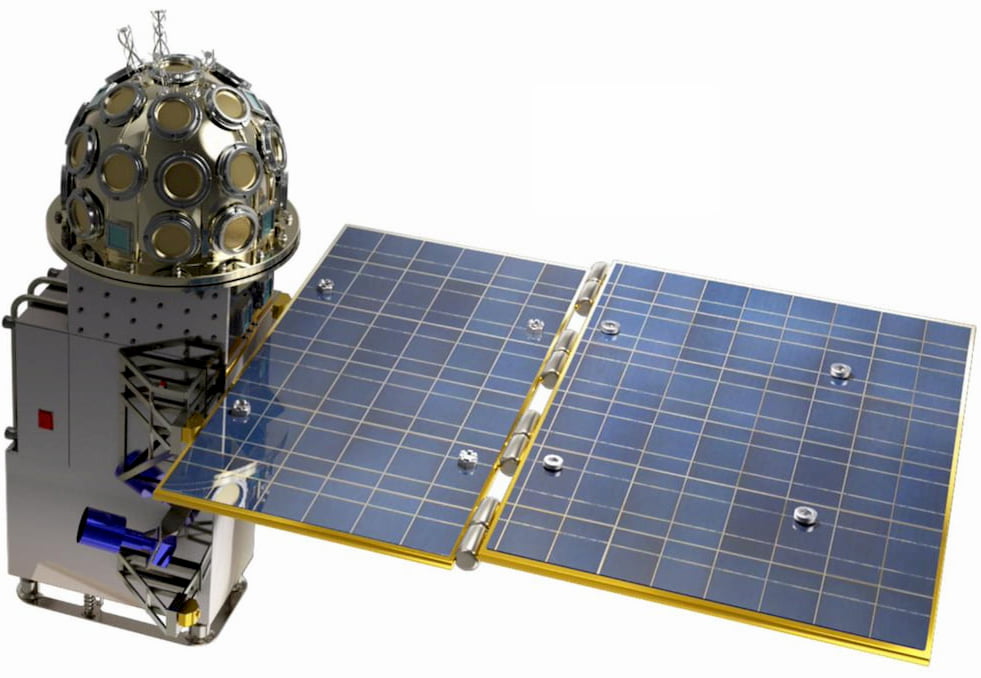
Uno de los satélites GECAM – Academia China de las Ciencias Esta pasada noche un cohete Larga Marcha 11 ponía en órbita los dos satélites de la misión GECAM, Gravitational Wave High-energy Electromagnetic Counterpart All-sky Monitor, Monitor de cielo completo de contrapartes...

Las nueve mujeres del programa Artemisa – NASA La NASA ha hecho pública la composición del grupo de astronautas que formarán parte de las tripulaciones del programa Artemisa con el que pretende volver a la Luna. Son 9 mujeres y 9 hombres....

El prototipo Starship SN8 de SpaceX resultó destruido al aterrizar tras su primer –y obviamente único– salto en el que alcanzó los 12,5 kilómetros de altitud. Pero para eso se hacen pruebas. Y esta parece haber salido muy bien. Salvo la...

Time-lapse of Dragon on approach – two Dragons now docked to the @space_station pic.twitter.com/I046jBmC7o— SpaceX (@SpaceX) December 8, 2020 Tal y como estaba previsto la primera Cargo Dragon de SpaceX ha atracado de forma autónoma en la Estación Espacial Internacional (EEI) a...

Chang'e 5 rendezvous, first robotic lunar docking, sample capsule transfer to return capsule. :CNSA/CLEPhttps://t.co/xP7FULCtp4 pic.twitter.com/of5JCfjQrB— LaunchStuff (@LaunchStuff) December 6, 2020 La misión china Chang'e 5 sigue avanzando incansablemente de cara a su objetivo de traer dos kilos de muestras de la Luna...

Hace unos minutos SpaceX ha lanzado la cápsula de carga Dragon 21 rumbo a la Estación Espacial Internacional (EEI). Pero aunque es la vigésimoprimera misión de suministros que lanza rumbo a la EEI es la primera vez que usa una Cargo...

La cápsula y su paracaídas ya en tierra - JAXA Prácticamente seis años justos después del lanzamiento de la misión –tuvo lugar el 3 de diciembre de 2014– la cápsula de muestras de la sonda japonesa Hayabusa 2 aterrizaba esta pasada noche...

Chang'e 5 ascent module launch from the surface of Luna.CNSA/CLEPℹ:https://t.co/UdTzMHemHD pic.twitter.com/1rPHvoUk2Q— LaunchStuff (@LaunchStuff) December 3, 2020 La ambiciosa misión china Chang'e 5 para traer a tierra muestras de la Luna ha dado otro importante paso adelante con el despegue de su cápsula...
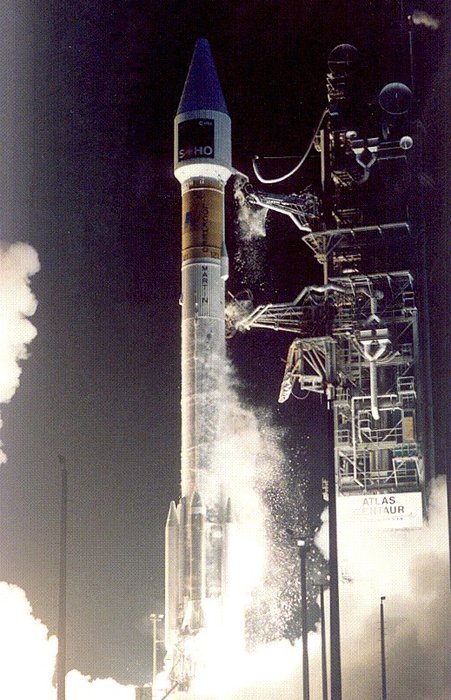
Lanzamiento del SOHO – ESA/NASA Hoy se cumplen 25 años del lanzamiento del observatorio espacial SOHO, una misión conjunta de la Agencia Espacial Europea (ESA) y de la NASA. Tiene como objetivos estudiar las capas externas del Sol (cromosfera, región de transición...

El aterrizador de la misión china Chang'e 5 ha conseguido tomar muestras de la superficie de la Luna con su brazo robot y otras más hasta una profundidad de dos metros con su taladro. Están todas selladas ya en la cápsula...

Fantastic footage of the Chang'e-5 descent and landing released. Great view of the horizon there are clear phases of deceleration, the spacecraft going vertical, coarse hazard avoidance, hovering and then the landing. [CNSA/CLEP] https://t.co/q6i9Nxeg2d pic.twitter.com/HvGwClRGG4— Andrew Jones (@AJ_FI) December 2, 2020 Tras...

Impresión artística de Chang'e 5 en órbita lunar – Proyecto de exploración lunar de China Tras algo menos de cinco días de viaje después de su lanzamiento el pasado 23 de noviembre la sonda china Chang'e 5 entraba en órbita alrededor de...
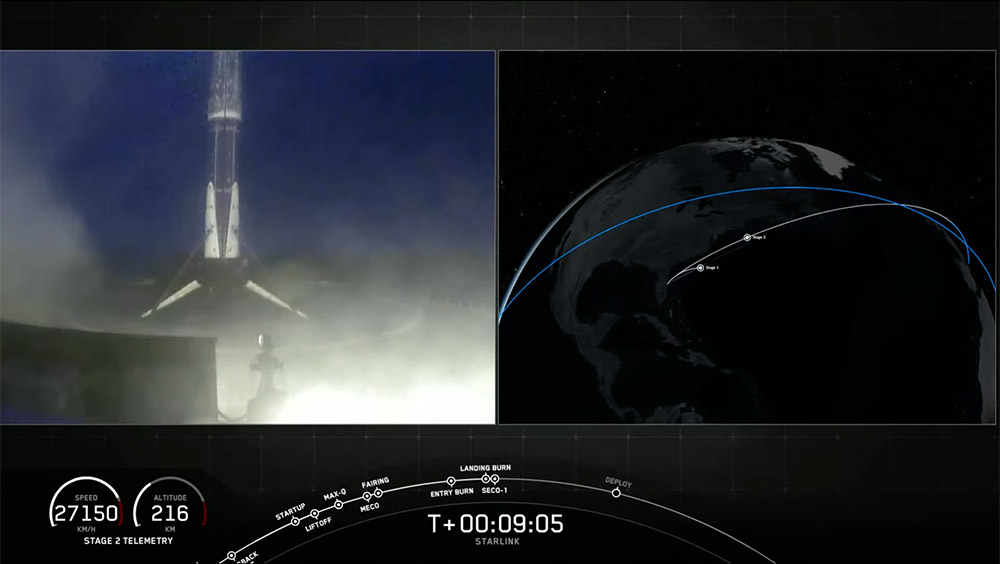
Esta pasada noche SpaceX ha marcado un nuevo hito en su carrera por demostrar la viabilidad de la reutilización de partes de sus cohetes: la primera etapa de Falcon 9 con número de serie B1049 ha ido y vuelto del espacio...

Después de cerca de una década de desarrollo y tres años extra de espera mientras no estaba listo el cohete necesario China acaba de lanzar la misión Chang'e 5 rumbo a la Luna. Su objetivo es traer de vuelta dos kilos...

Un Falcon 9 de SpaceX lanzaba sin problemas en la tarde del 21 de noviembre de 2020 el satélite medioambiental Sentinel 6 Michael Freilich. Se trata de una misión desarrollada en colaboración entre la Agencia Espacial Europea (ESA), la Uunión Europea,...

La primera etapa de la misión Return To Sender de una pieza en el agua – Rocket Lab Esta pasada noche Rocket Lab lanzó la misión bautizada Return To Sender (Devolver al remitente) con treinta satélites a bordo. El cohete cumplió a...
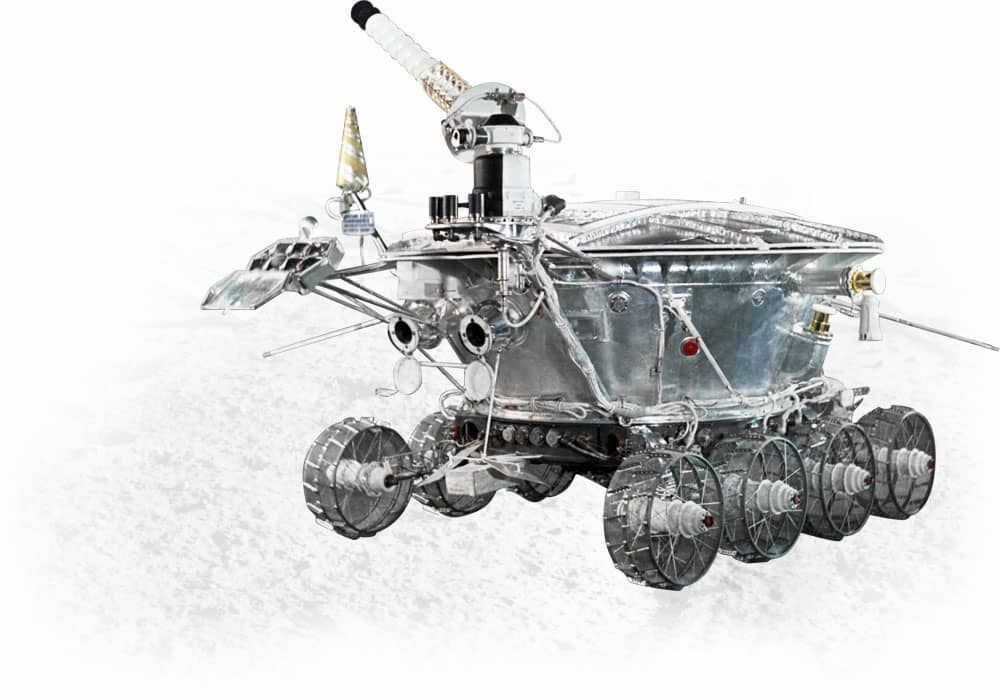
Impresión artística del Lunojod 1 en la Luna - Roscosmos Tras su lanzamiento el 10 de noviembre de 1970 el rover soviético Lunojod 1 se posaba sobre la superficie de la Luna a bordo de su plataforma de aterrizaje Luna 17 a...
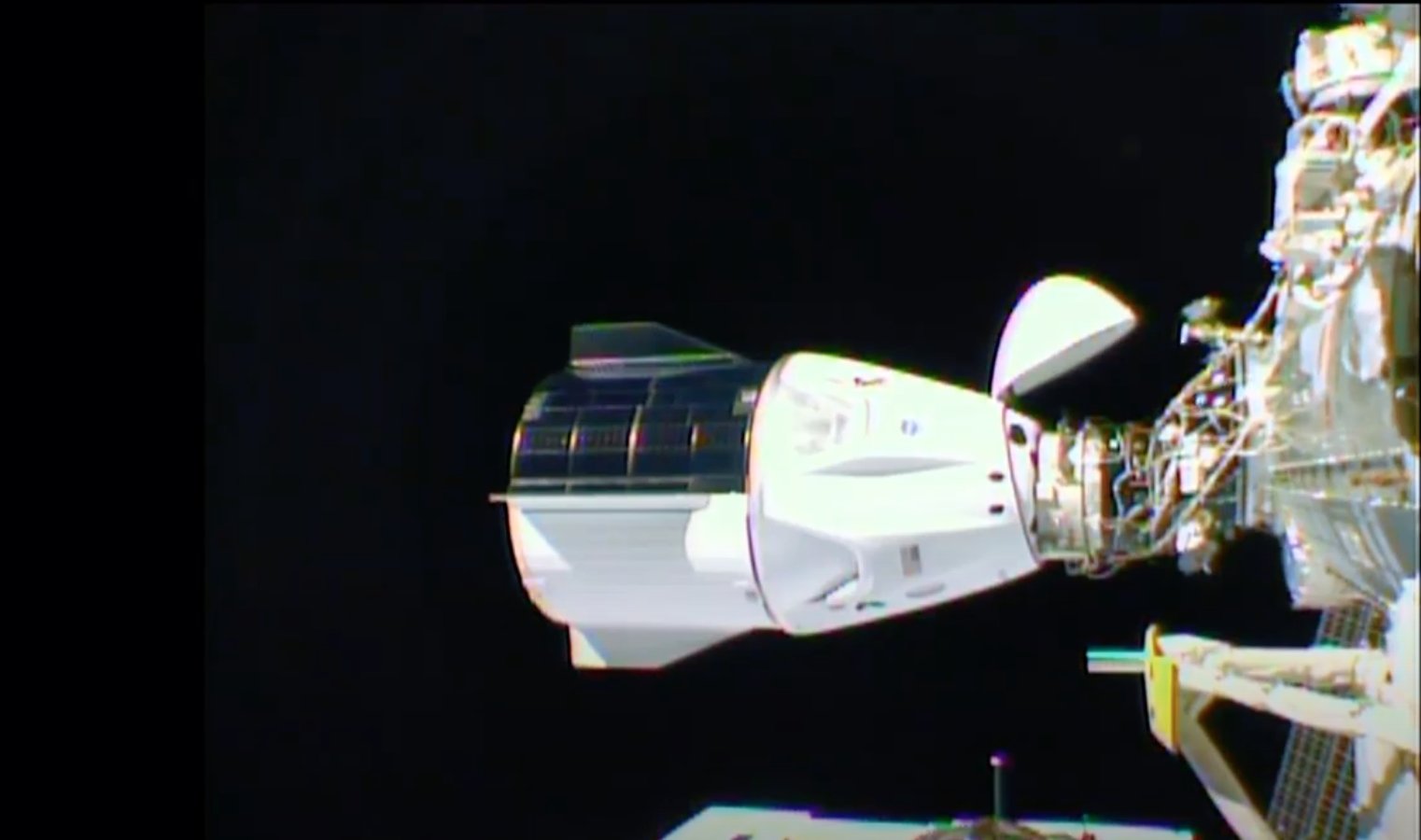
La Resilience atracada en en módulo Harmony de la EEI – NASA La buena noticia espacial de día frente a la pérdida de los satélites Seosat–Ingenio y Taranis en su lanzamiento es que la Crew Dragon Resilience y su tripulación han llegado...

Esta pasada noche el satélite español de observación terrestre Seosat-Ingenio tenía que haber sido puesto en órbita por un cohete Vega. Pero algo falló en la cuarta etapa del cohete con lo que tanto Seosat-Ingenio como Taranis, el satélite francés con...

Tal y como estaba previsto la cápsula tripulada Crew Dragon Resilience despegaba en la noche del 16 de noviembre de 2020 rumbo a la Estación Espacial Internacional (EEI) en la misión Crew–1, que marca la entrada en servicio de este modelo...

Es muy raro que se cumplan las fechas de desarrollo de un cohete. Y menos si además una pandemia prácticamente paraliza el mundo por en medio. Así que el primer lanzamiento de un Ariane 6, el futuro lanzador pesado de la...

El Ceres 1 en su primer lanzamiento - Xinhua No la tenía en mi radar pero Galactic Energy se ha convertido en la segunda empresa privada china en conseguir poner un cohete y su carga útil en órbita. En concreto se trataba...
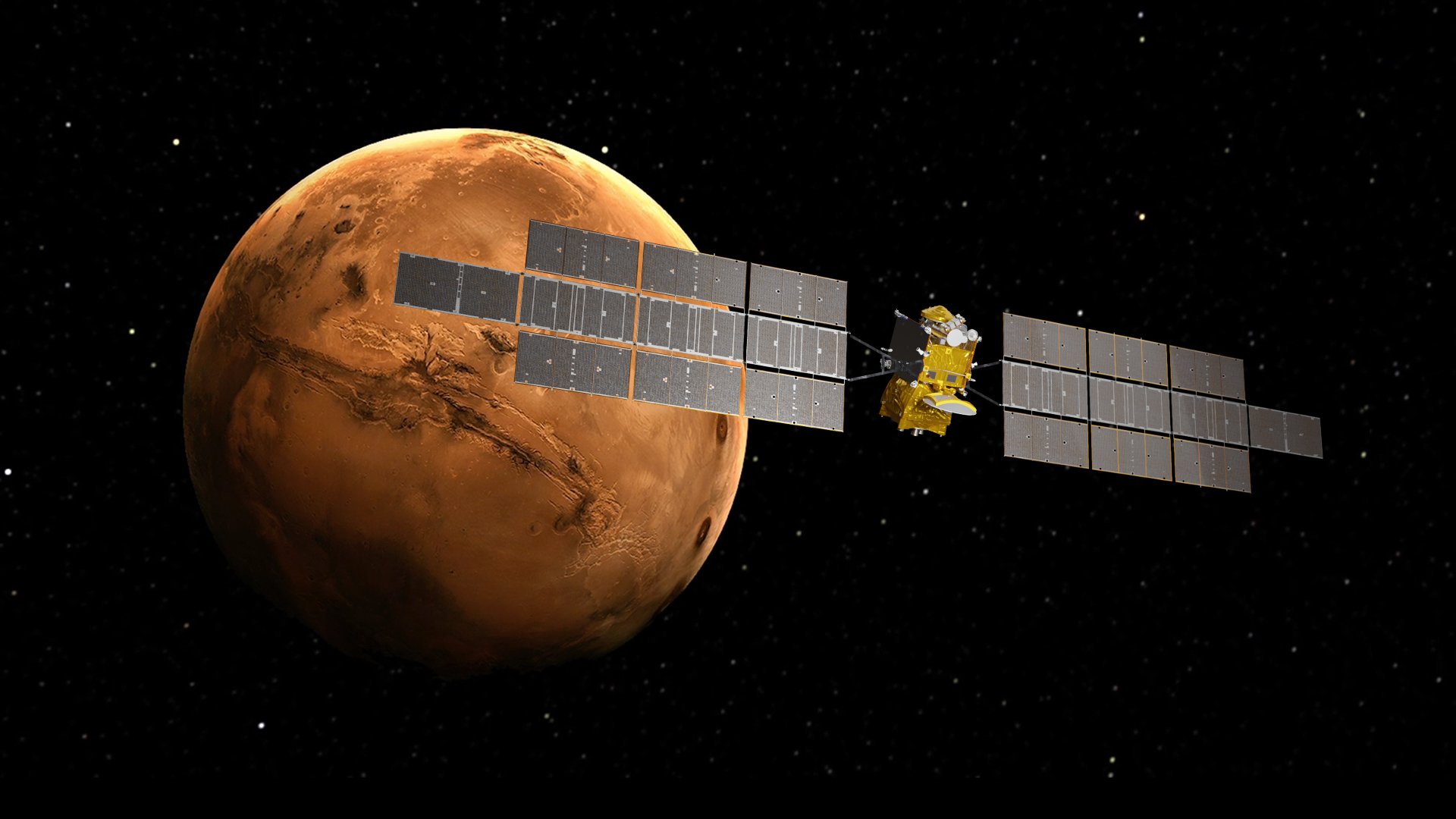
Aunque el rover Perseverance de la NASA está equipado para estudiar in situ las muestras que recoja en Marte un objetivo importante de la misión es poder traer algunas muestras a la Tierra. Airbus ha sido seleccionada para construir la nave...
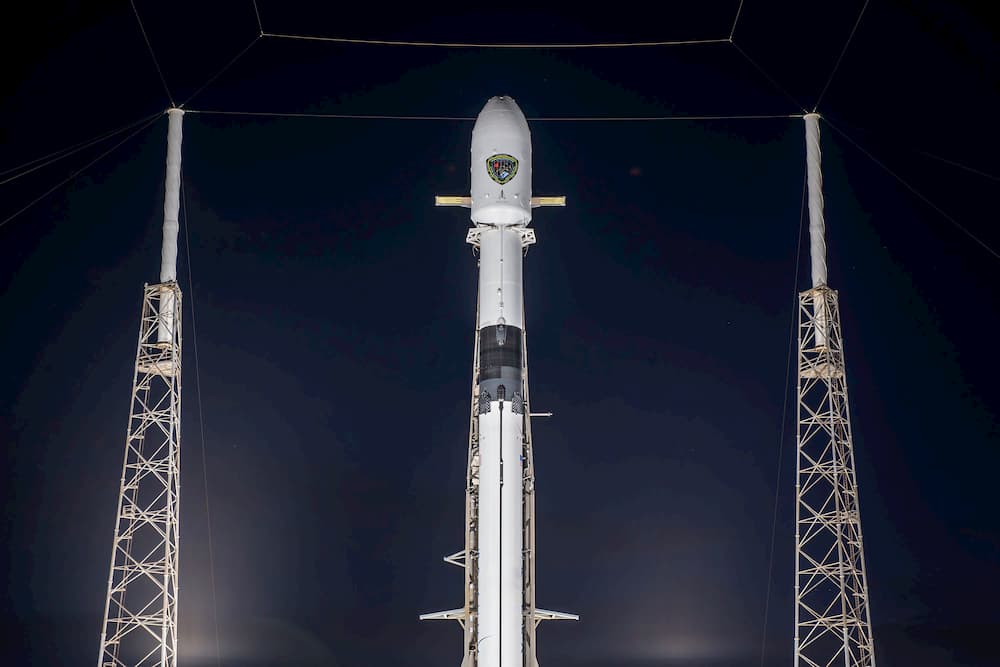
Con un mes y cuatro días de retraso sobre la fecha prevista originalmente SpaceX ha lanzado el cuarto satélite GPS de tercera generación para la Fuerza Aérea de los Estados Unidos. El Falcon 9 responsable del lanzamiento del GPS 3 SV04...

We just made in-space transportation even easier. After deploying 10 sats to perfect orbits for our customers on the #InFocus mission, the Kick Stage had one more trick up its sleeve. For the first time, we demonstrated a plane change maneuver. pic.twitter.com/de4zPiaoBq—...
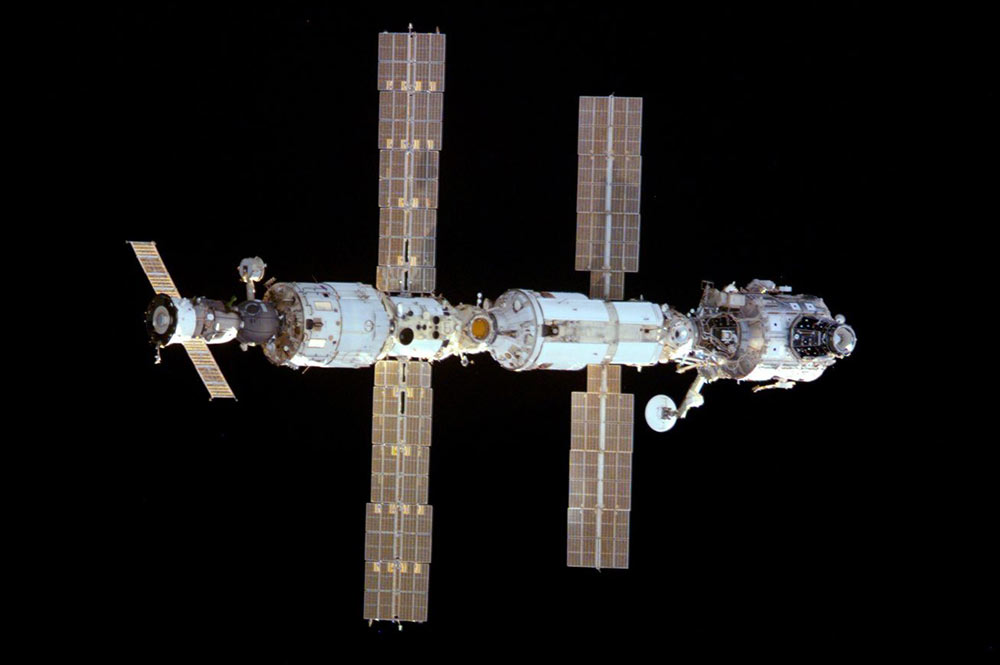
La Estación Espacial Internacional durante la Expedición 1. De izquierda a derecha: la Soyuz TM-31, Zvezda, Zarya y Unity – NASA El 2 de noviembre de 2000 a las 9:21:03 UTC la cápsula espacial tripulada Soyuz TM-31 atracaba en el módulo Zvezda...

I’ve officially closed the Sample Return Capsule! The sample of Bennu is sealed inside and ready for our voyage back to Earth. The SRC will touch down in the Utah desert on Sep. 24, 2023. Thanks, everyone, for being a part of...

Despegue de la Soyuz TM31 – NASA El 31 de octubre de 2000 a las 7:51 UTC fue la última vez en la que todos los seres humanos estuvimos en la Tierra. A las 7:52 la cápsula tripulada Soyuz TM-31 despegaba del...

Tras revisar los motores que provocaron la cancelación del lanzamiento de un cohete Falcon 9 con un satélite GPS III el pasado 2 de octubre y con ello el aplazamiento de la entrada en servicio de la Crew Dragon la SpaceX y...

Yesterday, the OSIRIS-REx team received images of the spacecraft’s sample collector head brimming with regolith. So much sample was collected that some of it is actually slowly escaping the sampling head. More details: https://t.co/ufUXdotgsO pic.twitter.com/2wINd1Tk2g— NASA's OSIRIS-REx (@OSIRISREx) October 23, 2020 En...

El pasado día 21 de octubre de 2020 la sonda Osiris-REX de la NASA llevó a cabo el primer intento de toma de muestras de un asteroide en la historia de la agencia. La telemetría recibida de la sonda parecía indicar...

La Soyuz MS-16 a punto de aterrizar - NASA El aterrizaje de la cápsula tripulada Soyuz MS-16 a las 4:54, hora peninsular española (UTC +2), del 22 de octubre de 2020 puso fin a los casi 196 días de su misión. A...
Después de casi dos años de estudios del asteroide Bennu y de un par de ensayos la sonda OSIRIS-REx de la NASA está lista para intentar tomar una muestra de 60 gramos del asteroide para traerla a casa. El intento tendrá...
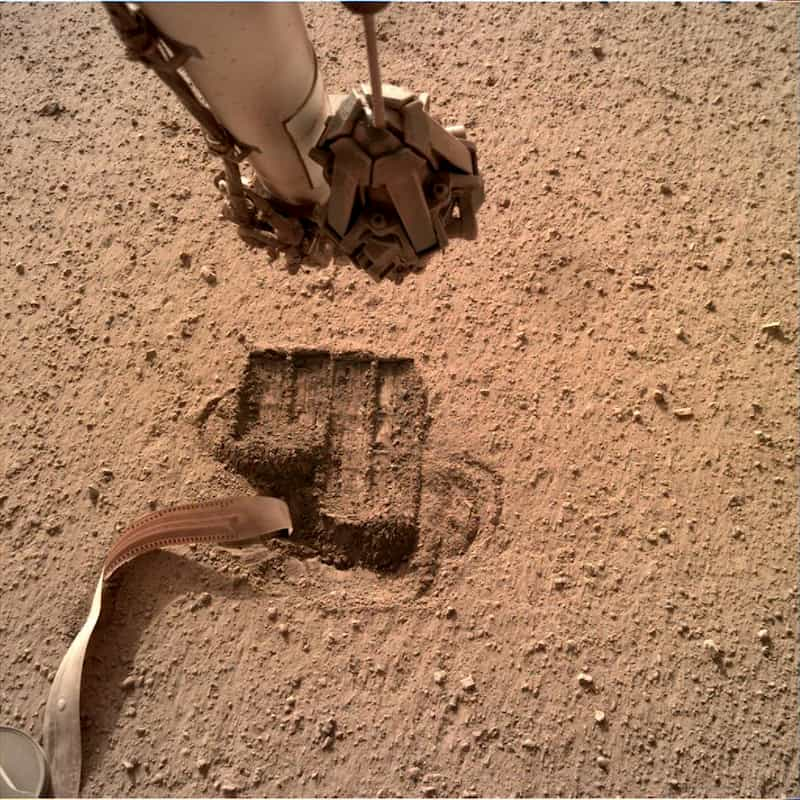
Bajo el suelo - NASA/JPL-Caltech Pues parece que aquello de que «el que la sigue la consigue» se va a cumplir en el caso del «topo» de la sonda InSight de la NASA. Y es que el equipo del instrumento por fin...

La tripulación de la Crew-1. De izquierda a derecha Shannon Walker, Victor Glover, Michael Hopkins y Soichi Noguchi – NASA La NASA y SpaceX han anunciado que la entrada en servicio de la Crew Dragon se retrasa a mediados de noviembre. Esto...

Una vez determinado que la fuga de aire detectada en la Estación Espacial Internacional (EEI) en septiembre de 2019 estaba en el módulo Zvezda ha sido finalmente una bolsa de té la que ha permitido localizar su ubicación exacta [enlace en ruso,...

Here it is! Beautiful #Venus as we made closest approach today! Watch how we swing by the planet from day to nightside during #BepiColomboVenusFlyby https://t.co/0AVrP2zKoy #ExploreFarther pic.twitter.com/nASSN35Y8U— Bepi (@ESA_Bepi) October 15, 2020 Lanzada el 20 de octubre de 2018 la misión BepiColombo...
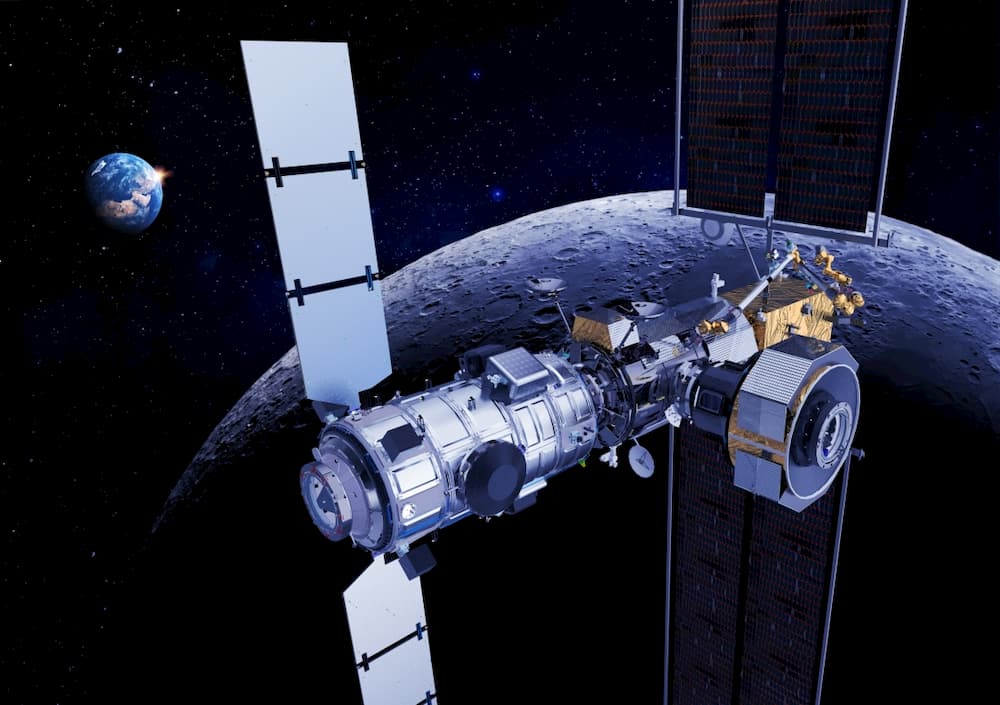
Impresión artística de la estación orbital lunar - Thales Alenia Space Thales Alenia Space y la Agencia Espacial Europea (ESA) han anunciado que la primera diseñará y construirá los dos módulos europeos que, según los planes actuales, incorporará la futura estación orbital...

Blue Origin, la empresa dedicada a cosas del ramo del espacio de Jeff Bezos, el fundador de Amazon, ha llevado a cabo con éxito el decimotercer lanzamiento de uno de sus cohetes suborbitales New Shepard. Fue el séptimo lanzamiento consecutivo de...

La Soyuz MS-17 recién atracada en la EEI - NASA TV La cápsula tripulada Soyuz MS-17 ha atracado en el módulo Rassvet de la Estación Espacial Internacional (EEI) a las 10:48, hora peninsular española (UTC +2), del 14 de octubre de 2020....
Impresión artística del lanzamiento del JWST en un Ariane 5 – ESA/D. Ducros Una serie de pruebas en las instalaciones de Northrop Grumman en California ha permitido comprobar que el telescopio espacial James Webb puede sobrevivir a su lanzamiento. Lo que obviamente...

En Centro Marshall de vuelos espaciales de la NASA se han entretenido en un proyecto que consiste en extraer sonidos de las imágenes del espacio profundo captadas por el telescopio Chandra. Esto permite «escuchar» (ejem) las imágenes que capta el telescopio...

Esta semana ha llegado a la Estación Espacial Internacional (EEI) un nuevo váter, también conocido como inodoro o, en términos menos técnicos, cagadero. Y no sé si es una casualidad o no pero Chris Cassidy ha aprovechado para publicar el vídeo...

En las instalaciones de SpaceX en Boca Chica en Texas llevan ya unos días trabajando en el ensamblado y pruebas del Starship SN8. Por ahora ha superado casi con éxito una carga de sus depósitos de combustible a presión de vuelo...

No había visto pasar el vídeo SAOCOM 1B | Launch and Landing en su momento pero mola todo. Se trata del viaje al espacio y la vuelta a tierra de la primera etapa del Falcon 9 que lanzó el satélite argentino...

Lanzamiento de la Cygnus 14 – NASA/Patrick Black Lanzada en la madrugada del 3 de octubre de 2020 la cápsula de carga Cygnus 14 «Kalpana Chawla» acaba de llegar sin problemas a la Estación Espacial Internacional (EEI) con algo más de 3.500...
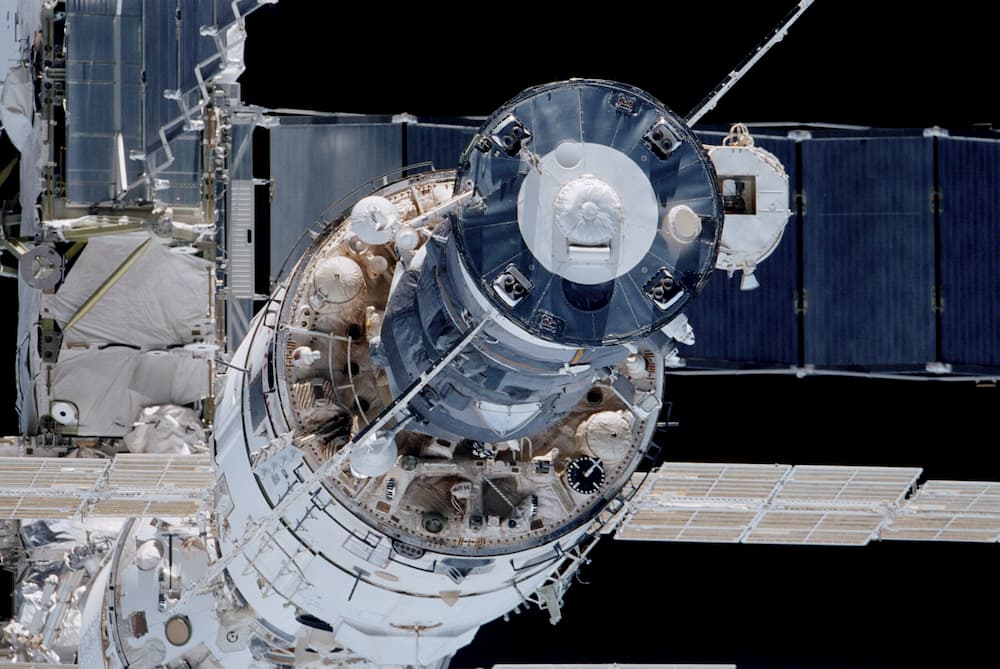
Zvezda con una cápsula acoplada en su puero posterior - Roscosmos Tras la última serie de comprobaciones hechas el fin de semana pasado Roscosmos ha anunciado que por fin se ha localizado el origen de una pequeña fuga de aire de la...

La NASA y SpaceX han anunciado que la entrada en servicio de la Crew Dragon se retrasa ocho días y pasa al 31 de octubre en lugar del 23 como estaba previsto inicialmente. Este aplazamiento sirve para dejar más margen al lanzamiento...

...ya sean el incendio del Apollo, la pérdida del Challenger, la pérdida del Columbia, o durante los cien años de vuelo que llevamos, las lecciones que hemos aprendido los que volamos ahora están escritas con la sangre de otras personas. -...

Óscar Menéndez y sus colegas de Lab Sonoro me han liado para hacer un podcast. A mis años. Lo hemos bautizado La Senda: La senda del pensamiento es el nombre del camino que bordeaba la casa de Charles Darwin y que el...

Rocket 3.1 despegando – Astra Tras casi seis meses de aplazamientos después del intento inicial y de haber sufrido daños en el cohete en un segundo intento por fin Astra ha conseguido lanzar su primer Rocket 3. Pero el lanzamiento ha fracasado...

He terminado de ver Away (Andrew Hinderaker, 2020), una interesante y recomendable serie de diez episodios que como deja entrever el tráiler trata sobre los peligros y sentimientos del primer viaje tripulado a Marte en futuro bastante cercano. La temática desde...

Parece que SpaceX va dominando el proceso de construcción de prototipos de su futuro cohete Starship pues acaba de conseguir que el SN6 haga su primer salto de 150 metros. Es un cambio importante porque todos los anteriores, salvo el Starhopper...
Sin muchos datos –y por ahora ningún tipo de imagen– China ha lanzado su avión espacial en su primer vuelo. Por ahora sólo han dicho que «la nave espacial de prueba estará en órbita durante un tiempo antes de regresar al lugar...
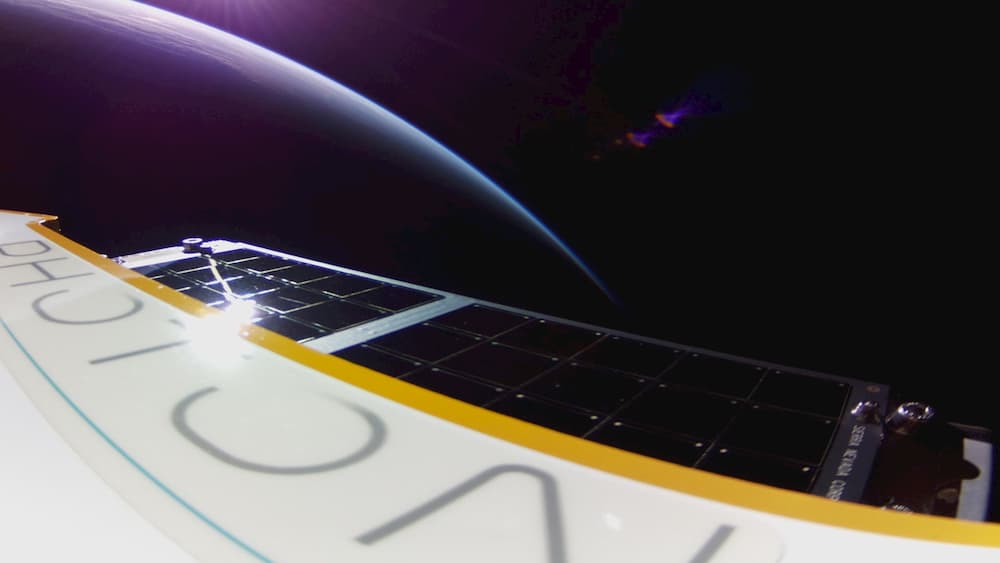
Foto enviada por Fisrt Light desde el espacio - Rocket Lab El lanzamiento del I Can't Believe It's Not Optical no sólo marcó la vuelta al servicio del cohete Electrón sino que también fue el primer lanzamiento de un satélite artificial basado...
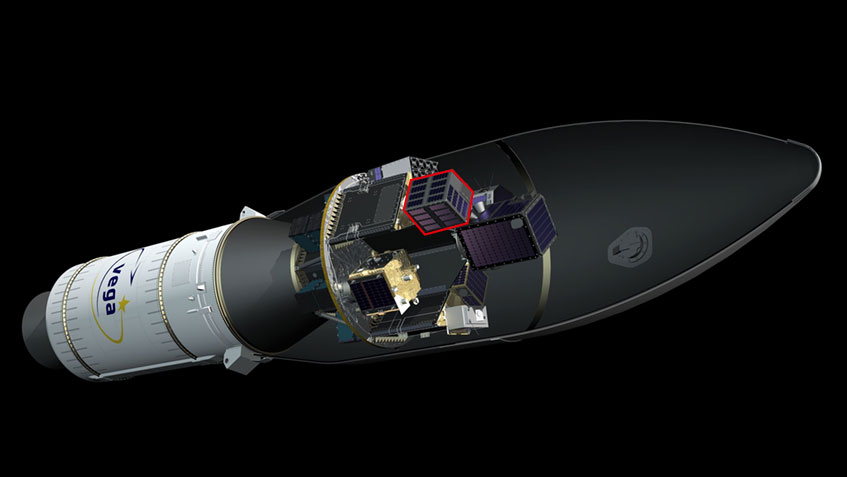
El UPMSat-2 durante los preparativos para su lanzamiento- IDR AETSIAE UPM Tras un año de retraso debidos al fallo del anterior cohete Vega, unos meses más a causa del cierre del espaciopuerto de Kourou por la COVID–19, y unas cuantas semanas...

Estamos oficialmente impresionados con el modelo a radiocontrol del Antonov An-225 Mriya («del» porque sólo hay uno en todo el mundo) con un transbordador espacial Burán que ha construido a partir de cero Hans Bühr. No sólo porque el Mriya tiene...

Acoplamiento de las cargas útiles al cohete – Arianespace Tras identificar la causa del fallo de su decimoquinto lanzamiento y un retraso de más de mes y medio extra debido a la meteorología el cohete Vega de la Agencia Espacial Europea está...

Un Falcon 9 de SpaceX lanzó el satélite argentino de observación terrestre Saocom 1B desde el el Complejo de Lanzamiento Espacial 40 de Cabo Cañaveral en la noche del 31 de agosto de 2020. Se trataba del primer lanzamiento a órbita...

El cohete Electrón de Rocket Lab ha vuelto sin problemas al servicio con la puesta en órbita del satélite de observación terrestre Sequoia de Capella Space. Era el primer lanzamiento desde que el pasado mes de julio el anterior Electrón fallara...
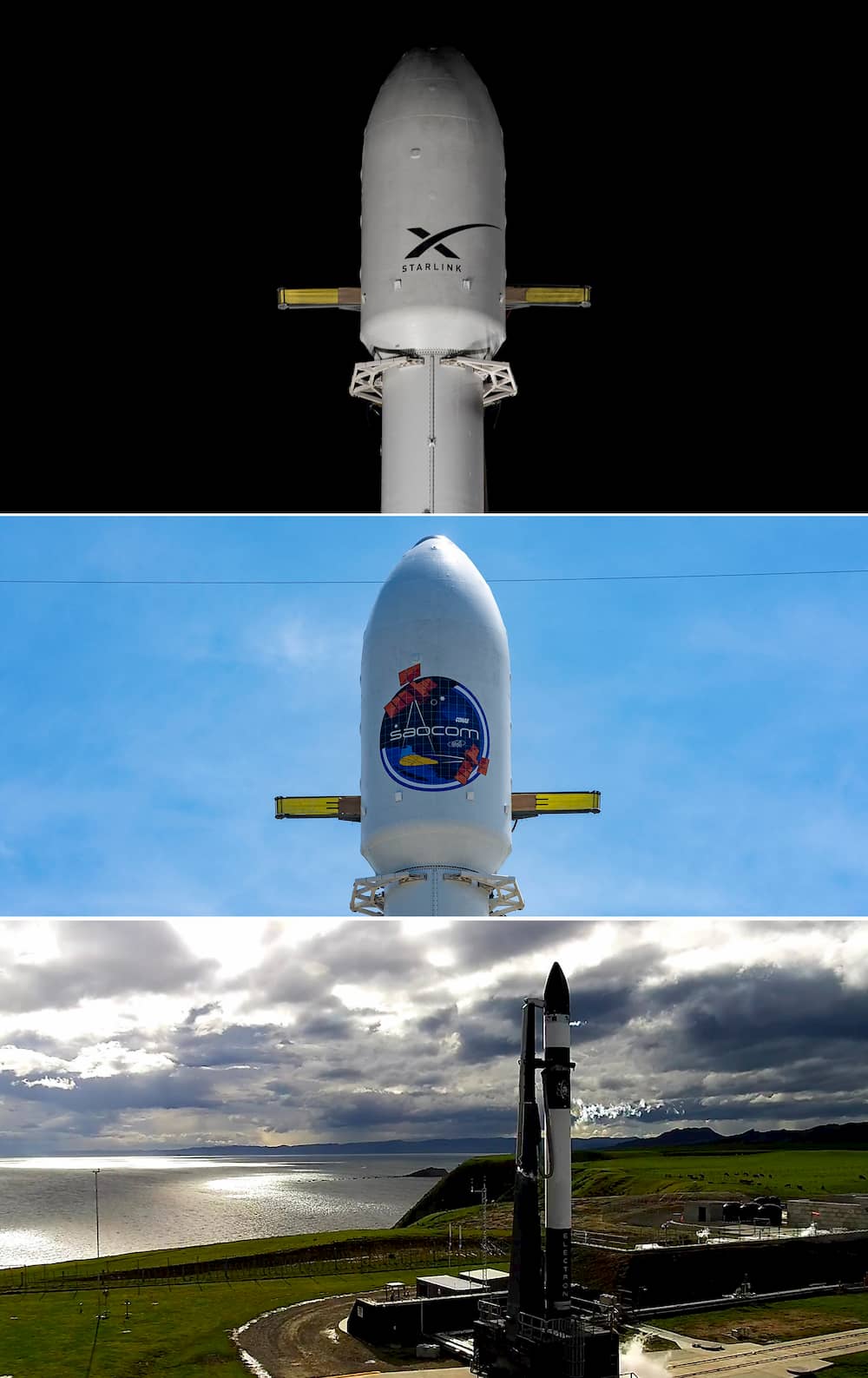
Cofia protectora del Saocom - SpaceX Domingo (y un poco de lunes) de espaciotrastorno con Rocket Lab y SpaceX, que en poco más de doce horas llevarán a cabo, si todo va sobre lo previsto, tres lanzamientos espaciales. Tendrán lugar entre las...

Jeanette Epps durante su entrenamiento – NASA Dos años y medio después de su misteriosa eliminación de la misión Soyuz MS-09 la astronauta Jeanette Epps de la NASA reaparece asignada a la primera misión regular de una Starliner a la Estación Espacial...
Despegue de la Starliner OFT – NASA Kathyr Kueders, la responsable de los programas tripulados de la NASA, decía hace unos días que la segunda misión de prueba de una cápsula tripulada Starliner de Boeing a la Estación Espacial Internacional no va...

La Estación Espacial Internacional vista desde la Soyuz MS-08 – NASA/Roscosmos La Estación Espacial Internacional (EEI) no es estanca al 100%. Siempre hay una mínima fuga de aire con la que se cuenta. Y de hecho en las naves de carga que...

Tras partir de la Estación Espacial Internacional (EEI) el pasado 18 de agosto de 2020 la cápsula de carga HTV-9/Kounotori 9 de la Agencia Japonesa de Expoloración Aeroespacial (JAXA) terminaba su misión con una reentrada controlada en la atmósfera a primera...

Impresión artística de satélites Starlink en órbita – SpaceX Desde hace unas semanas SpaceX ofrece la posibilidad de incorporarse como conejillo de indias a las pruebas de funcionamiento del acceso a Internet a través de sus constelación de satélites Starlink. Quienes se...
Semper Supra.– «Siempre por encima» SpaceForce.mil es la dirección internet la web de la Fuerza Espacial estadounidense, acabada en un apropiado dominio .mil («militar») como dicen las reglas. La NASA es NASA.gov al ser «entidad gubernamental» y no militar. La web...

Newly-discovered asteroid ZTF0DxQ passed less than 1/4 Earth diameter yesterday, making it the closest-known flyby that didn't hit our planet.@renerphoSimulation: https://t.co/a81R100OwVHigher-res GIF: https://t.co/4Wxn0YNpVb pic.twitter.com/SMtVRbjYOA— Tony Dunn (@tony873004) August 17, 2020 El domingo 16 de agosto de 2020 el asteroide 2020 QG pasó...

SpaceX ha puesto en órbita el décimo lote de satélites Starlink de serie. En vez de los 60 habituales de estos lanzamientos «sólo» lanzaron 58 porque les acompañaban los satélites de observación terrestre SkySat 19, 20 y 21 de Planet Labs....

Despegue del Pics Or It Didn't Happen – Rocket Lab El 5 de julio de 2020 el cohete Electrón de Rocket Labs bautizado como Pics Or It Didn't Happen falló poco después de la ignición de la segunda etapa. Fue el primero...

Tripulación de la Crew-1. De izquierda a derecha Shannon Walker, Victor Glover, Michael Hopkins y Soichi Noguchi- SpaceX Aún pendientes de terminar de analizar los datos obtenidos de la primera misión tripulada de una Crew Dragon a la Estación Espacial Internacional, lo...

Apenas pasada la medianoche del 15 al 16 de agosto de 2020 un Ariane 5 ECA despegaba del Espaciopuerto de Kourou para poner tres satélites en órbita de transferencia geoestacionaria. Fue el primer lanzamiento europeo desde el parón impuesto por la...

Imagen conceptual de una constelación de satélites - Ejército de los Estados Unidos La Comisión Federal de Comunicaciones (FCC) de los Estados Unidos acaba de aprobar la petición de Amazon de lanzar 3.236 satélites para acceso a Internet. Al estilo de las...

Con varias semanas de retraso SpaceX por fin ha podido llevar a cabo el décimo lanzamiento de satélites Starlink de serie. Aparte del número redondo este lanzamiento tiene la particularidad de que ha sido el primero en el que todos ellos...

Lanzado en 2010 el satélite CryoSat-2 de la Agencia Espacial Europea (ESA) lleva desde entonces estudiando la capa de hielo que cubre los polos y la variación en su grosor. Lanzado en 2018 el ICESat–2 de la NASA hace lo propio....

Tras meses de pruebas y de sacrificio de prototipos anteriores en ensayos y accidentes el Starship SN5 por fin ha hecho su primer vuelo. Propulsado por un motor Raptor se elevó unos 150 metros, se desplazó aproximadamente lo mismo en horizontal,...

Amerizaje. Bienvenidos de vuelta al planeta Tierra. Gracias por volar con SpaceX. Un amerizaje en el Golfo de México a las 20:48, hora peninsular española, ponía fin a la primera misión de una Crew Dragon Tripulada. Bob Behnken, Doug Hurley y...

Este vídeo es casi un anuncio que cuenta lo guay que son los trajes espaciales de SpaceX. Pero también sirve para que nos hagamos una idea de cómo son y qué funciones cumplen. El primer concepto que dejan claro es que...

Con diez milisegundos de adelanto sobre la hora prevista un cohete Atlas V despegaba de Cabo Cañaveral para lanzar el rover Perseverance de la NASA hacia Marte a las 13:50, hora peninsular española, del 30 de julio de 2020. La maniobra,...
Andaba el otro día haciendo pruebas con la cámara y fotos de la Luna cuando vi algo que parecía Marte o similar. Tiré algunas fotos con más tiempo de exposición y aparecieron varias estrellas que eran invisibles a simple vista. Fotografiar...
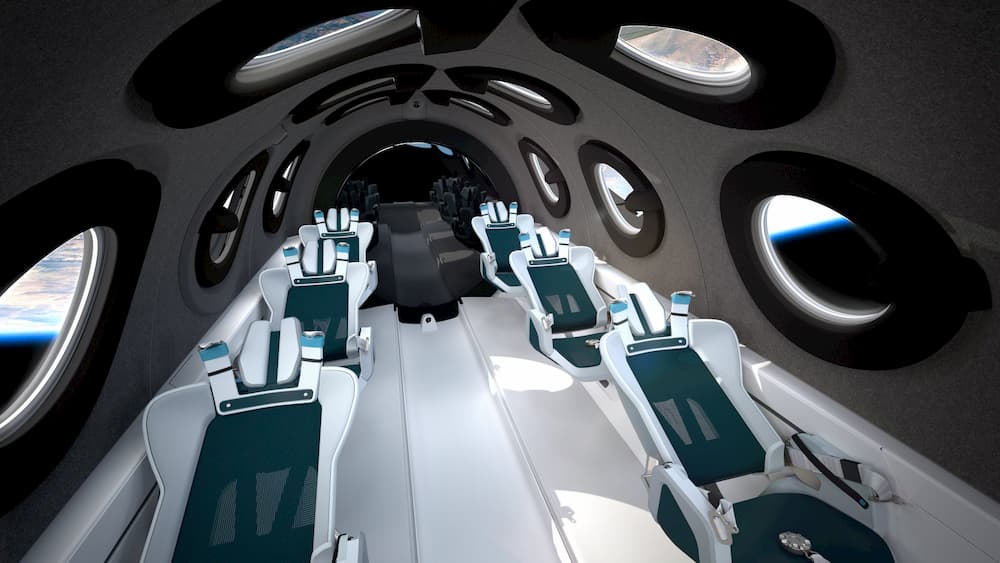
Virgin Galactic acaba de presentar públicamente el diseño de la cabina de pasajeros de su avión espacial ShaceShipTwo. La idea básica es que quienes hagan un vuelo suborbital en él disfruten de su experiencia tanto en lo que se refiere a...

Todo fue bien durante los primeros segundos de vuelo del primer cohete LauncherOne de Virgin Orbit. Hasta que se apagó el motor y el cohete se precipitó hacia el mar. El estudio de la telemetría les ha permitido determinar que la...

Tras pasar la Flight Readiness Review, en la que se determinó que la misión está lista para su lanzamiento, Perseverance acaba de pasar su Launch Readiness Review, la reunión en la que, si procede, se autoriza el lanzamiento propiamente dicho. Así...
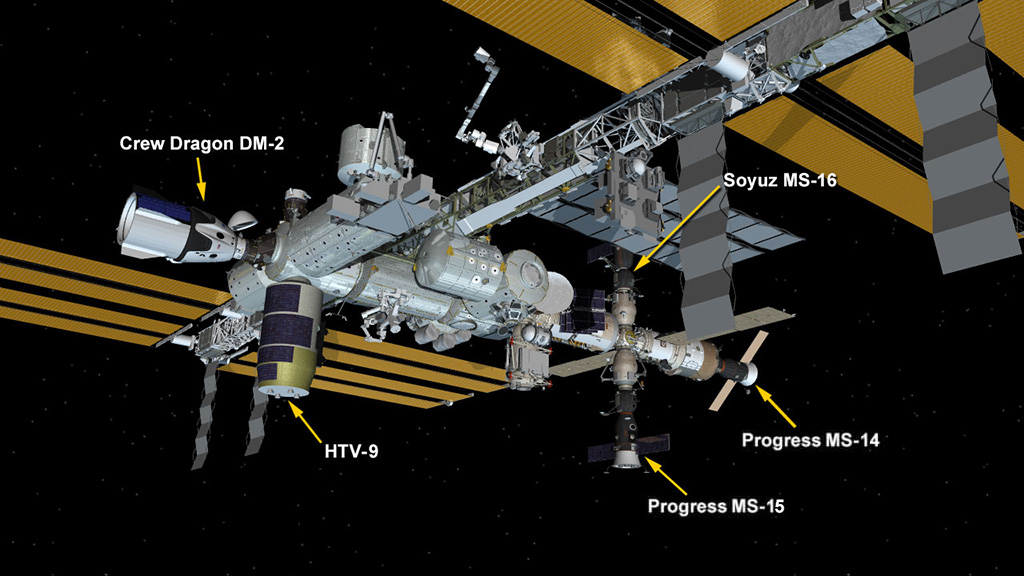
Con 2.600 kilos de suministros a bordo la cápsula de carga Progress MS-15 ya está en la Estación Espacial Internacional (EEI). Es la cápsula de carga Progress número 76 lanzada a la EEI. Despegó a las 16:26:22, hora peninsular española (14:26:22...
Impresión artística del lanzamiento de Perseverance – NASA/JPL-Caltech El lanzamiento de Perseverance hacia Marte ha pasado su Flight Readiness Review (FRR), así que la NASA ha confirmado el 30 de julio como fecha del lanzamiento de la misión. O al menos del...

Un cohete Larga Marcha 5 ha lanzado la misión china Tianwen 1 hacia Marte. El lanzamiento se produjo desde el Centro de Lanzamiento de Satélites de Wenchang a primera hora del miércoles 23 de julio. Su llegada al planeta rojo está...

La pasada noche un Falcon 9 de SpaceX ponía en órbita el satélite militar de telecomunicaciones Anasis-II para Corea del Sur. Pero lo hizo con la primera etapa que lanzó la primera misión tripulada de una Crew Dragon el pasado 30...

Estas nuevas escenas de Marte a 4K UHD de resolución son bastante impresionantes. Muestran lo vasto y desolado que es planeta rojo, que recuerda a los desiertos de la Tierra y a algunas zonas rocosas similares de valles inertes de nuestro...

Tras dos aplazamientos debidos a la mala meteorología la sonda Hope (Esperanza, Al Amal en Árabe) de los Emiratos Árabes Unidos (EAU) viaja ya hacia Marte. Aún desplazándose a 120.000 kilómetros por hora Hope necesitará unos siete meses para recorrer los...
Impresión artística del lanzamiento del JWST en un Ariane 5 – ESA/D. Ducros Van ya tantos retrasos que casi no es noticia. Pero la NASA ha confirmado que aplaza el lanzamiento del telescopio espacial James Webb al 31 de octubre de 2021....

La Agencia Espacial europea acaba de hacer públicas las primeras imágenes obtenidas por la Solar Orbiter. Tomadas durante el primer perihelio de la misión –la parte mas cercana al Sol de una órbita– a unos 77 millones de kilómetros, más o...

La mente de Elon Musk va a mil por hora y produce ideas que muchas veces quedan en nada. Scott Manley ha hecho tres vídeos en los que recoge los proyectos abandonados de SpaceX, que es sólo una de las empresas...
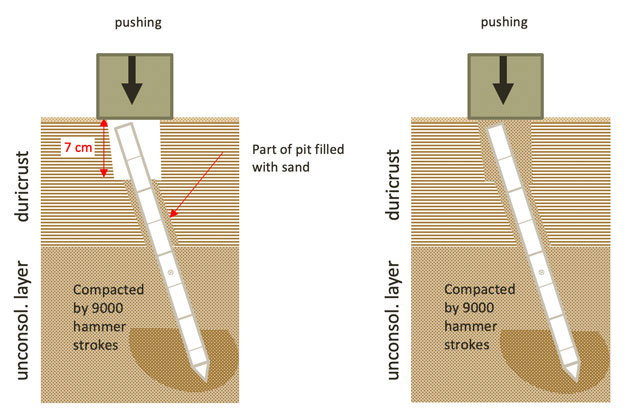
Esquema del nuevo plan - DLR Según cuenta Tilman Spohn, el investigador principal del «topo» de la sonda InSight de la NASA, en una actualización publicada 7 de julio de 2020 el instrumento está bajo el suelo pero no avanza. De hecho...
Hace unas semanas buscando puzzles para matar el aburrimiento encontré estos curiosos puzzles redondos de 1.000 piezas en AliExpress. No tengo ni idea de cómo será su calidad ni si se parecerán mucho a las fotos, porque comprar allí siempre supone...

Esta pasada noche Rocket Lab ha sufrido el primer fallo de un cohete Electrón desde su entrada en servicio. En concreto era el Electrón número 13 que lanzaban, lo que no deja de ser una lamentable coincidencia. Todo fue bien durante...
Impresión artística de un satélite OneWeb en órbita - OneWeb Después de la quiebra de OneWeb, una de las empresas que están intentando crear una constelación de satélites para dar acceso a Internet, se ha producido ya la subasta de su deuda....

El programa Copérnico (Copernicus) de observación terrestre que gestiona la Agencia Espacial Europea (ESA) la Unión Europea constaba hasta ahora de seis misiones Sentinel (Centinela). Algunas en satélites dedicados, otras como instrumentos a bordo de otros satélites. Pero entre 2025 y...

Perseverance a punto de ser encapsulado en su cofia protectora - NASA/Christian Mangano Varios problemas con el cohete que lo va a lanzar y con los sistemas de tierra asociados han provocado ya tres aplazamientos en la fecha de lanzamiento del rover...
La Crew Dragon Endeavour atracada en la EEI - NASA/Doug Hurley Tras un lanzamiento sin problemas desde la plataforma 39A del Centro Espacial Kenney la cápsula tripulada Crew Dragon Endeavour acaba de cumplir un mes atracada en la Estación Espacial Internacional (EEI)....

Dmitri Rogozin, el director de Roscosmos, la agencia espacial rusa, acaba de anunciar que Anna Kikina volará a la Estación Espacial Internacional (EEI) en 2022. Si las asignaciones se mantienen como hasta ahora probablemente lo hará en septiembre de ese año a...
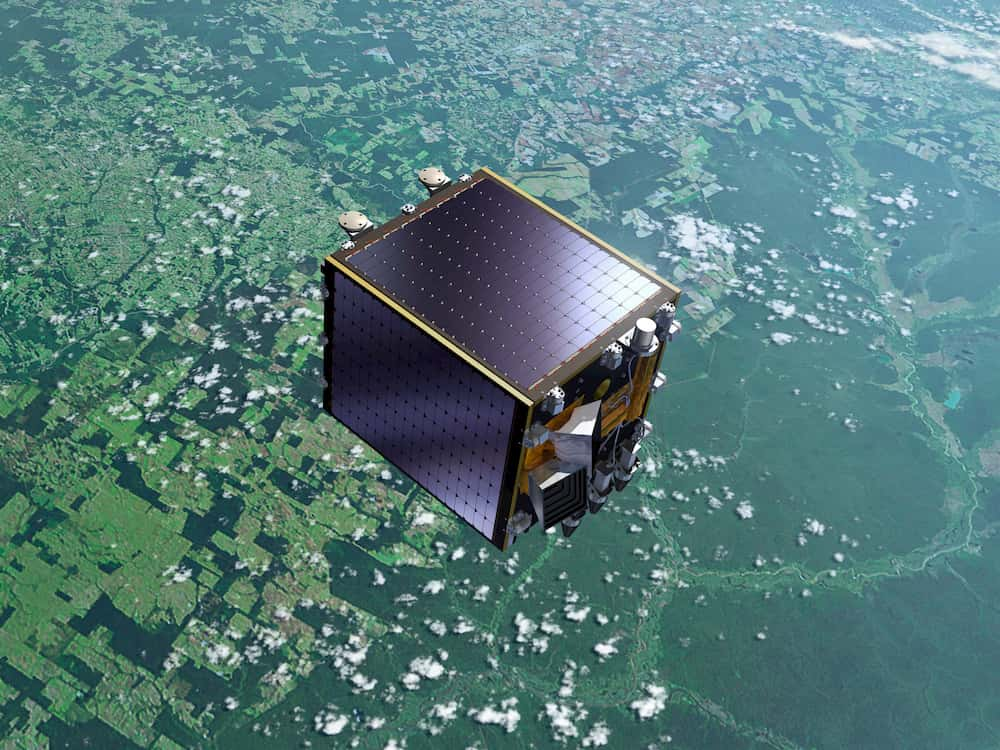
Impresión artística del Proba-V en órbita - ESA-P.Carril Después de casi siete años de servicio cuando las previsiones más optimistas calculaban cinco el satélite Proba-V de la Agencia Espacial Europea termina hoy su vida operativa. Su objetivo principal era monitorizar la cubierta...

Después de casi dos semanas en la plataforma de lanzamiento la meteorología sigue impidiendo el lanzamiento del cohete Vega de la Agencia Espacial Europea en la misión que marcará su vuelta al servicio. Y dado que las previsiones para los próximos días...

El astronauta Fyodor Yurchikhin durante un paseo espacial - Roscosmos Según se puede leer en Contrato entre RSC Energia y Space Adventures (el artículo está en ruso pero Chrome, por ejemplo, os lo traduce) la empresa estadounidense Space Adventures ha firmado un...
Lanzado en febrero de 2010 el Solar Dynamics Observatory (SDO) es un observatorio espacial de la NASA que se dedica única y exclusivamente a mirar el Sol para que podamos estudiar su actividad. Con sus tres instrumentos obtiene una imagen de...

China launched the last satellite of the BeiDou Navigation Satellite System (BDS) on Tuesday, marking the completion of the deployment of its own global navigation system https://t.co/zvmKa4BJqI pic.twitter.com/eVmmGIJ6it— China Xinhua News (@XHNews) June 23, 2020 Un cohete Larga Marcha 3B despegaba a...
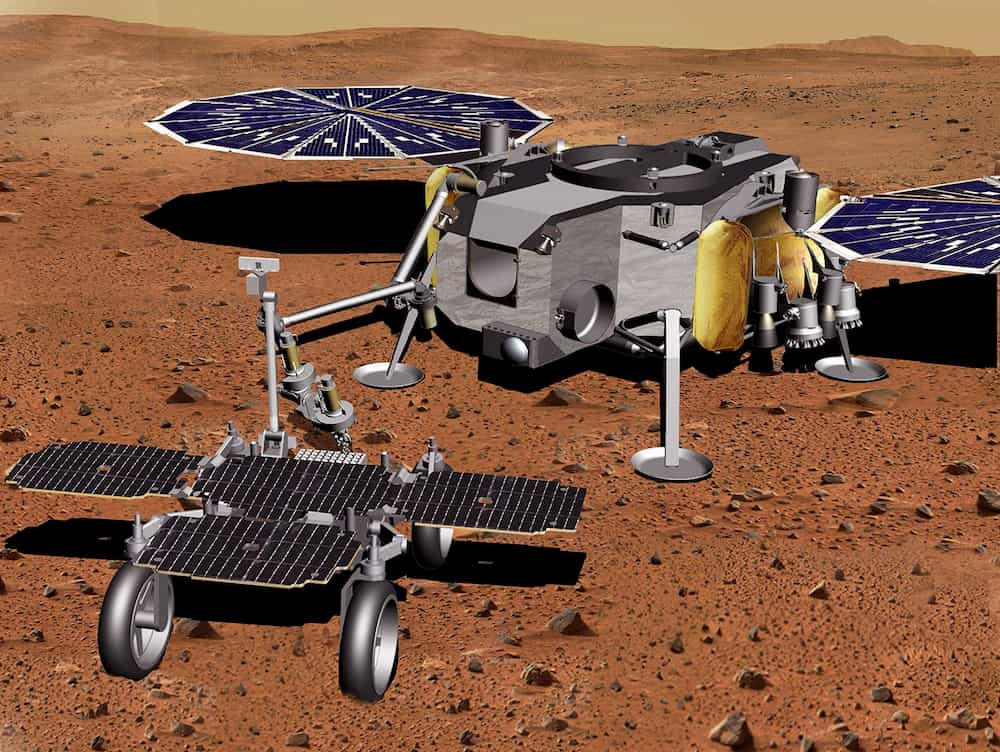
Sample Fetch rover en primer plano con el Sample Retrieval Lander detrás – NASA JPL Caltech Desde hace años la comunidad científica sueña con que alguna misión pueda traer muestras tomadas en Marte de vuelta a la Tierra. Y puede que por...
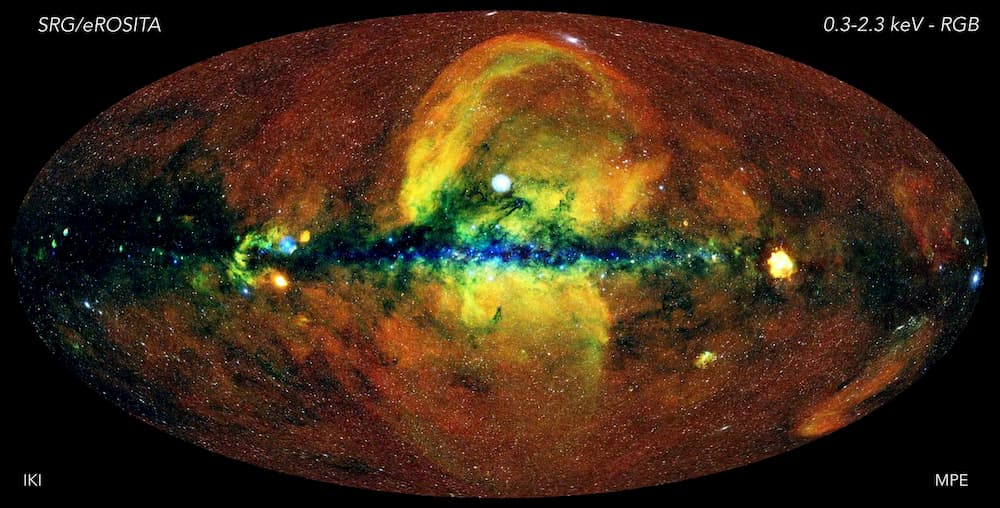
El cielo en rayos X visto por eROSITA – Jeremy Sanders, Hermann Brunner y el equipo eSASS (MPE); Eugene Churazov, Marat Gilfanov (en representación de IKI) El equipo de eROSITA, de extended ROentgen Survey with an Imaging Telescope Array, que es el...
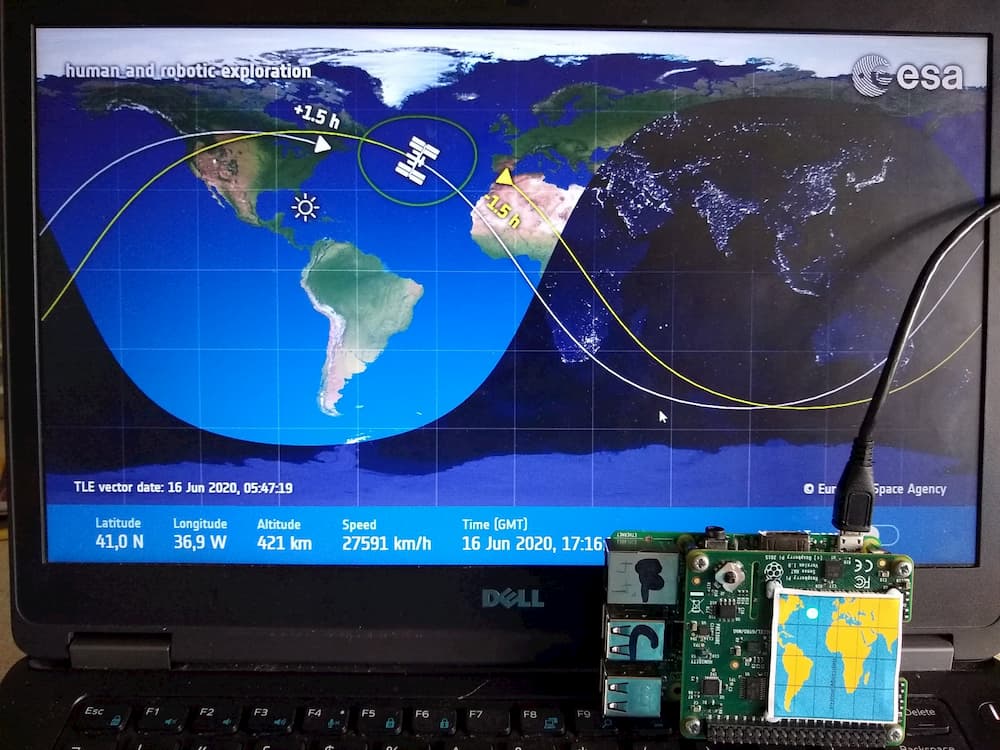
El mapa en acción – John Chinner John Chinner, un ingeniero de hardware de Airbus Space, se dio cuenta de que tenía un Sense Hat para Raspberry Pi medio muerto de risa. Y pensó que podría darle uso fabricando el mapa de...

El 15 de junio de 2020 la sonda Solar Orbiter de la Agencia Espacial Europea alcanzaba la distancia mínima al Sol –perihelio– de su primera órbita. El acercamiento fue hasta unos 77 millones de kilómetros, aproximadamente la mitad de la distancia...

Aunque SpaceX tiene una cierta prisa para tener en órbita el número de satélites mínimo para empezar a hacer pruebas de su sistema de acceso a Internet Starlink la pela es la pela. Así que en la mañana de 13 de...
En Raw Space tienen este divertido vídeo-desastre de cuando hace un par de años al astronauta Andrew («Drew») Feustel se le olvidó poner la tarjeta de memoria SD a la cámara GoPro que sacaron para grabar desde el exterior de la...
Kathy Lueders celebra la apertura de escotillas entre la Crew Dragon Endeavour y la EEI – NASA/Joel Kowsky La NASA acaba de anunciar el nombramiento de Kathy Lueders como directora de los programas tripulados de la agencia. Es la primera mujer en...

Aunque los vientos lo pararon en el primer intento Rocket Lab se ha apuntado un nuevo éxito con el lanzamiento del cohete Don't Stop Me Now en el segundo. Despegando de la Plataforma A del Complejo de Lanzamiento 1 que la...

El Don't Stop Me Now listo para despegar – Rocket Lab Hasta en tres ocasiones arrancó la cuenta atrás para el lanzamiento del Don't Stop Me Now de Rocket Lab. Pero en las tres –la última apenas a 50 segundos del despegue–...

Prueba de extensión de la torre del James Webb – Northrop Grumman Falta todavía un anuncio oficial pero Thomas Zurbuchen, el director de los programas científicos de la NASA acaba de confirmar que el lanzamiento del telescopio espacial James Webb (JWST) sufrirá...
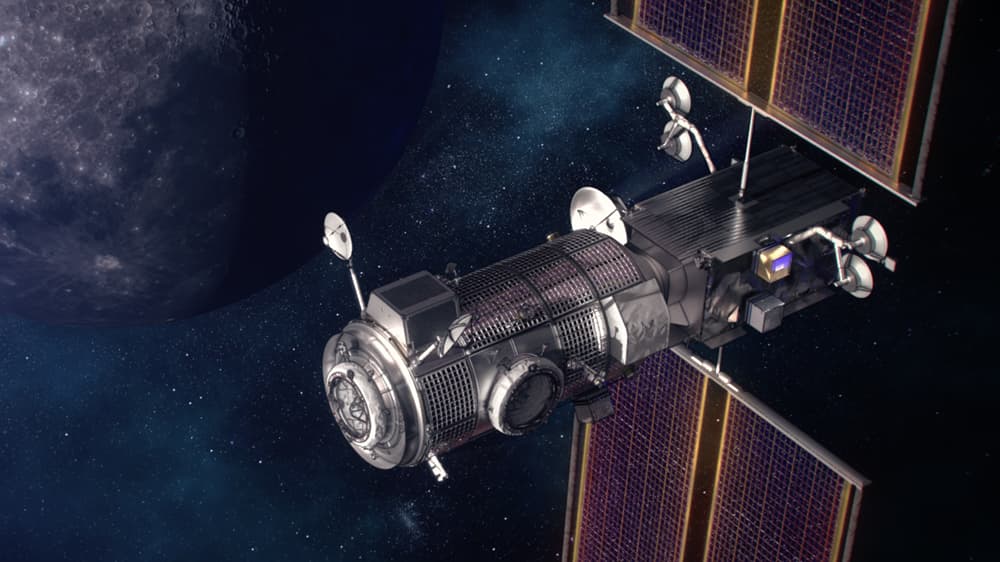
Impresión artística de los dos primeros módulos de la estación. El habitable es el cilíndrico de la izquierda – NASA La NASA ha cerrado por fin el contrato para la construcción del módulo habitable de la futura estación lunar Gateway. Conocido como...

Don't Stop Me Now en la plataforma de lanzamiento - Rocket Lab Aplazado desde marzo por la pandemia de COVID–19 causada por el coronavirus SARS-CoV-2 todo está listo para el lanzamiento del cohete Electrón de Rocket Lab bautizado como Don't Stop Me...

Tal día como hoy, un 9 de junio pero de 1970, se jugaba la primera partida de ajedrez entre cosmonautas en el espacio y un equipo en tierra. En aquella ocasión fueron los cosmonautas Nikolayev y Sevastyanov, a bordo de la...

La Crew Dragon Endeavour llegando a la Estación Espacial Internacional - NASA La NASA acaba de modificar el contrato que tiene con SpaceX dentro del Programa de Tripulaciones Comerciales para permitir el uso de cápsulas Crew Dragon previamente utilizadas en sus lanzamientos...

La etapa central del primer SLS en el Banco de Pruebas B2 del Centro Espacial Stennis – NASA Igual que le sucedió a otras agencias espaciales el trabajo de la NASA se ha visto afectado por el coronavirus. Algunos centros incluso tuvieron...

Aunque suena un poco a trabalenguas SpaceX ha conseguido por primera vez recuperar una primera etapa de un Falcon 9 que ha sido lanzada cinco veces. Es un paso adelante más en demostrar que las primeras etapas de los Falcon 9...

La Fuerza Espacial de los Estados Unidos existe de forma independiente desde hace unos meses. Pero los creadores de The Office se han adelantado y rodado una primera temporada del «cómo sería» un nuevo ejército espacial de exploración no tan pacífica,...

After several assists from my robotic arm, the mole appears to be underground. It’s been a real challenge troubleshooting from millions of miles away. We still need to see if the mole can dig on its own. More from our @DLR_en partners:...

Listo para volar por quinta vez – SpaceX No es tan emocionante como el lanzamiento de la primera Crew Dragon tripulada de hace unos días. Pero SpaceX va a llevar a cabo el segundo intento de recuperar la primera etapa de un...

Una de las consecuencias que tuvo la pandemia de COVID–19 causada por el coronavirus SARS-CoV-2 fue la paralización de la actividad en el espaciopuerto europeo de Kourou. Pero pasado lo peor de la pandemia está retomándola. Uno de los primeros pasos...

Una de las cosas que más nos gusta a quienes sufrimos de espaciotrastorno es ver los aterrizajes de las primeras etapas de los cohetes de SpaceX. Pero a menudo la transmisión se corta justo cuando están a punto de aterrizar en...

Docking confirmed – Crew Dragon has arrived at the @space_station! pic.twitter.com/KiKBpZ8R2H— SpaceX (@SpaceX) May 31, 2020 Tras un viaje sin ningún problema en absoluto la Crew Dragon Endeavour llegaba a la Estación Espacial Internacional (EEI) a primera hora de la tarde del...
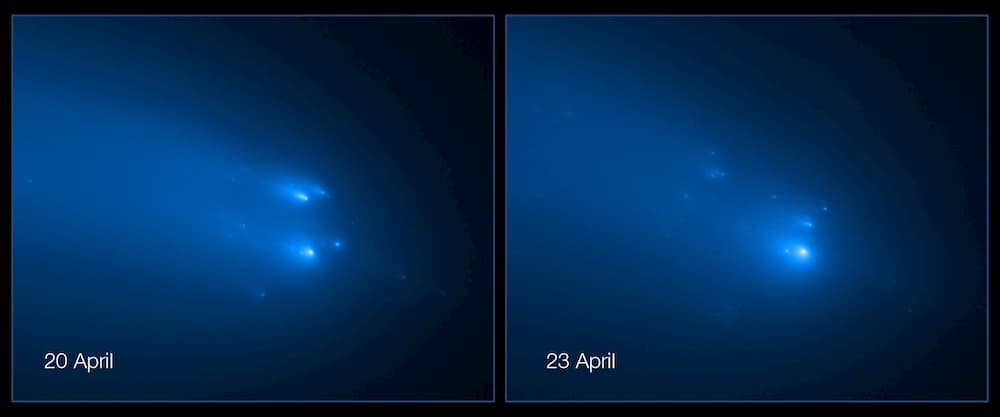
El cometa ATLAS despachurrándose - NASA, ESA, D. Jewitt (UCLA), Q. Ye (University of Maryland) Cuando lanzamos una sonda espacial hacia otro astro su trayectoria se calcula con años de antelación. Y más si la trayectoria va a usar la asistencia gravitatoria...

Una de las cosas que han hecho Bob Behnken y Douglas Hurley durante su viaje del Centro Espacial Kennedy a la Estación Espacial Internacional (EEI) en la primera Crew Dragon tripulada fue una retransmisión en directo desde su cápsula, al estilo...

Liftoff! pic.twitter.com/DRBfdUM7JA— SpaceX (@SpaceX) May 30, 2020 Pues a la segunda ha ido la vencida y Bob Behnken y Doug Hurley ya viajan rumbo a la Estación Espacial Internacional a bordo de la primera Crew Dragon tripulada de la historia. Su llegada...

Partida de la cápsula - NASA Una reentrada controlada en la atmósfera en las últimas horas del 29 de mayo de 2020 puso fin a la misión de la cápsula de carga Cygnus NG-13 S.S. Robert Lawrence Jr. Durante la reentrada resultó...
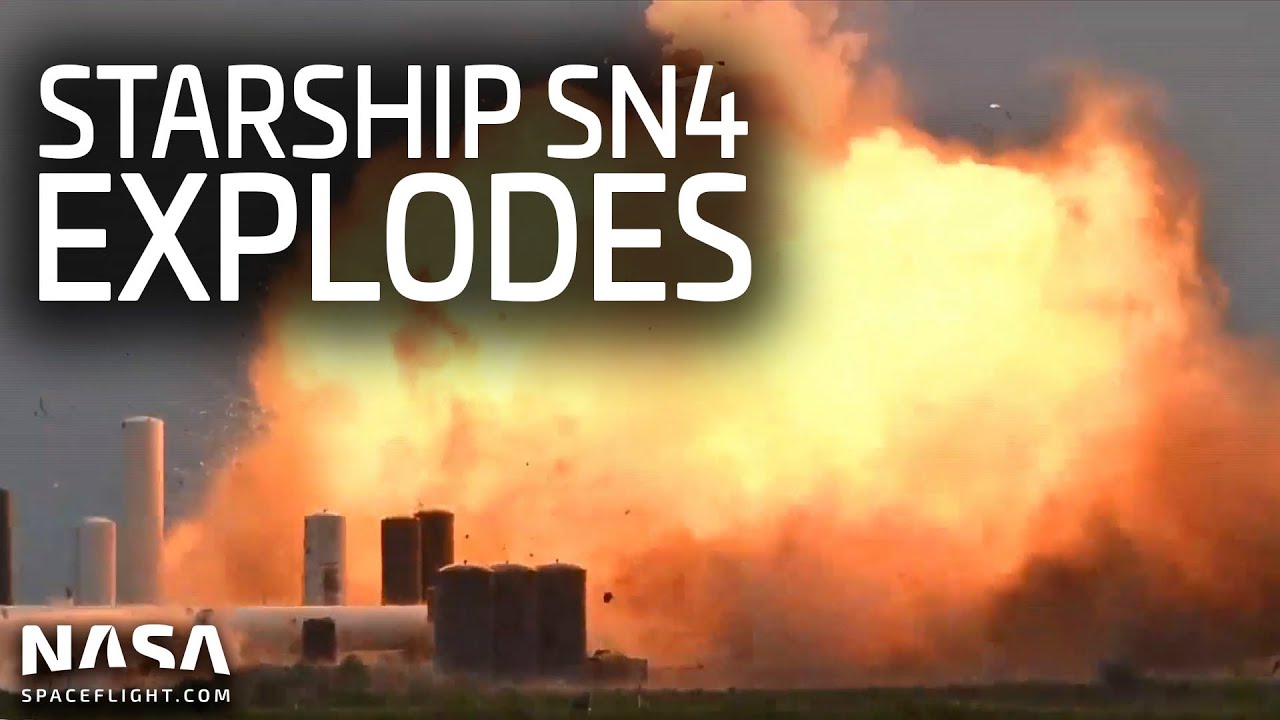
Un par de minutos después de un encendido de prueba de su motor Raptor el Spaceship SN4, que a pesar de su nombre es el sexto prototipo de este cohete, saltaba por los aires. SpaceX no ha informado todavía de la...

Virgin Orbit ha publicado más información acerca del primer lanzamiento de un cohete LauncherOne en Mission recap: our first launch demo. La nota dice que durante unos 9 segundos después de la separación del avión nodriza todo funcionó a la perfección....

Machine vs. Nature pic.twitter.com/mUbvx58Ide— Brandon M. Wynn(@HoverSlamPhoto) May 27, 2020 La cuenta atrás para el lanzamiento de la primera Crew Dragon tripulada fue técnicamente perfecta. Tanto la cápsula como el cohete como los sistemas asociados en tierra funcionaron a la perfección- La...

.@NASA and @SpaceX are "go" for launch following today’s Launch Readiness Review for the Crew Dragon test flight targeted for May 27.The U.S. Air Force 45th Weather Squadron predicted a 60% chance of unfavorable weather. However, things are looking up: https://t.co/5wJ0H8xTMW pic.twitter.com/BxR0XPEXZa—...
El primer LauncherOne en el aire - Virgin Orbit Con un día de retraso sobre la previsión inicial ante la necesidad de solucionar un problema con un sensor Virgin Orbit llevó a cabo el lanzamiento de su primer cohete LauncherOne el 25...

Kounotori 9 al lado de la EEI - Ivan Vagner/Roscosmos Tal y como estaba previsto el carguero espacial japonés HTV-9, también conocido como Kounotori 9, ha llegado hoy a la Estación Espacial Internacional (EEI). Fue capturado por Chris Cassidy de la NASA...

La cápsula vista desde la torre de servicio – SpaceX SpaceX y la NASA llevaron a cabo en pasado sábado 23 de mayo de 2020 un último ensayo del lanzamiento de la misión DM-2, la primera misión tripulada de una Crew Dragon....

Prueba estática – NASA/Bill Ingalls Otro paso adelante más para el lanzamiento de la primera cápsula Crew Dragon rumbo a la Estación Espacial Internacional: el Falcon 9 que tiene que lanzarla ha pasado sin problemas su prueba de encendido. Con el cohete...
Falcon 9 and Crew Dragon are vertical on the launch pad pic.twitter.com/2nw9h0jxde— SpaceX (@SpaceX) May 21, 2020 Tras día y pico la misión DM-2 de SpaceX, la que será la primera misión tripulada de una Crew Dragon, ha pasado su Flight Readiness...

Primer despliegue de prueba de un LauncherOne – Virgin Orbit Tras haber dejado caer uno –intencionadamente– en julio de 2019 Virgin Orbit está lista para intentar el primer lanzamiento real de uno de sus cohetes Launcher One. Disponen de dos ventanas de...

Lanzamiento del HTV-9 – MHI Launch Services Tal y como estaba previsto a las 19:30 del 20 de mayo de 2020 el último cohete H-IIB despegaba de la plataforma de lanzamiento del centro espacial de Tanegashima para poner en órbita el último...

Pocos días después del que hubiera sido su 95º cumpleaños la NASA acaba de anunciar que a partir de ahora el telescopio espacial WFIRST se llama telescopio espacial Nancy Grace Roman (NGRST). Nancy Grace Roman fue la primera jefa de astronomía...

Doug Loverro, el responsable de los programas tripulados de la NASA, ha dimitido con efecto el 18 de mayo de 2020. Del correo de despedida que envió al personal del programa: A lo largo de mi larga carrera de más de cuatro...

El HTV-9 en la plataforma de lanzamiento / MHI Launch Services Todo está listo en el centro espacial de Tanegashima en Japón para el lanzamiento del carguero espacial HTV–9 rumbo a la Estación Espacial Internacional (EEI). Está previsto para las 19:30, hora...
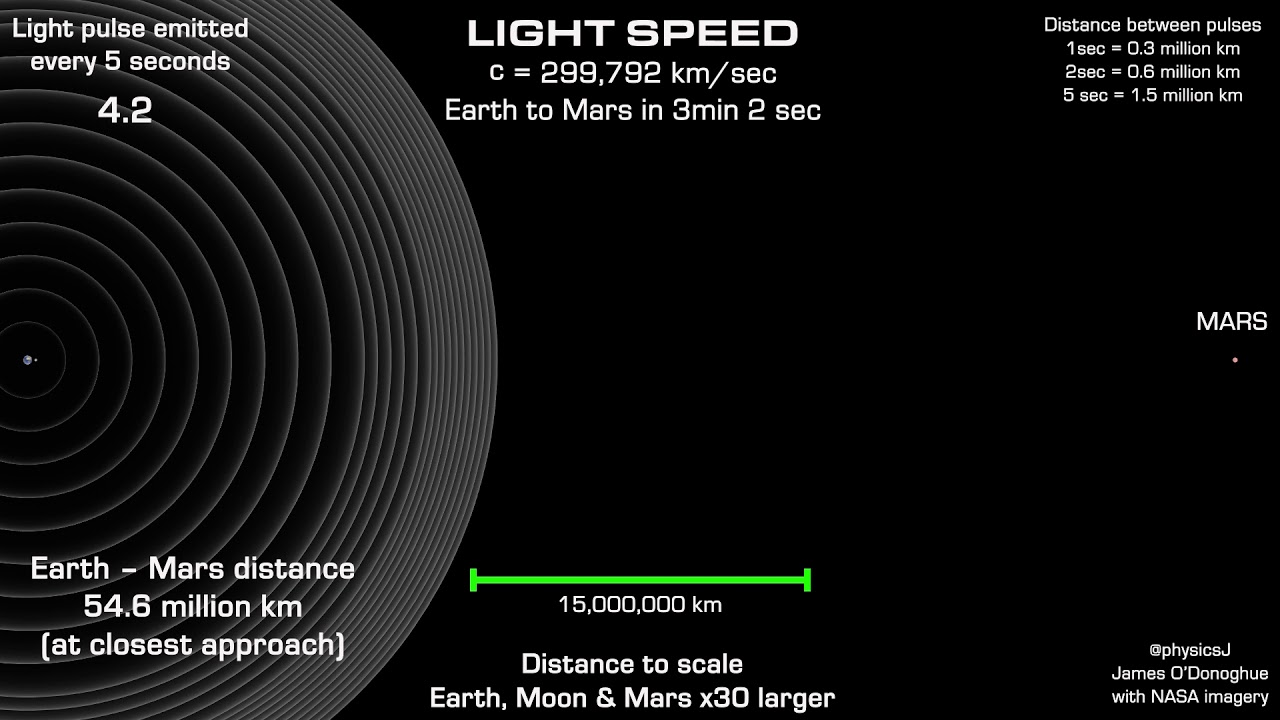
James O’Donoghue ha añadido algunas estupendas animaciones más a su colección dedicada a enseñar la vastedad de las distancias espaciales. La idea es mostrar cómo se vería a vista de pájaro un pulso de luz emitido desde la Tierra mostrándolo «a...

Con un día de retraso porque las condiciones meteorológicas no colaboraron en el primer intento un Atlas 5 de United Launch Alliance ha puesto en órbita uno de los dos Boeing X–37B de la Fuerza Aérea de los Estados Unidos (USAF)...
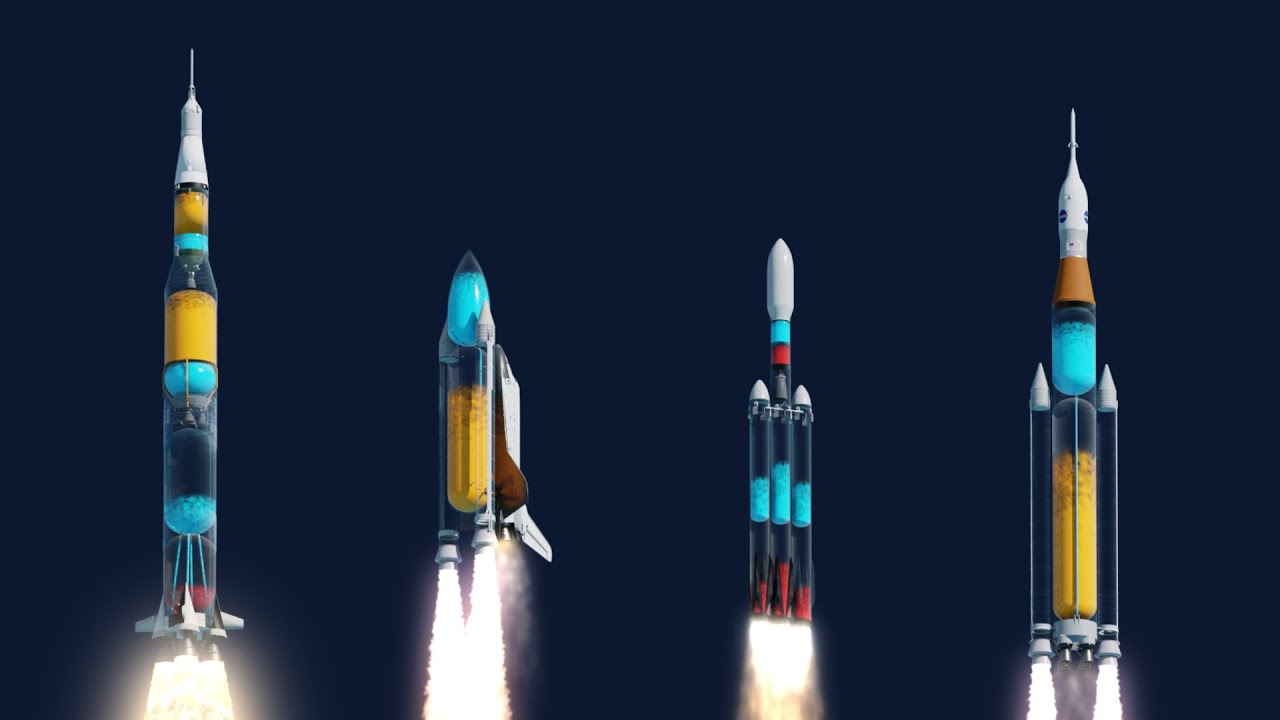
En el canal dedicado a los cohetes y naves espaciales Hazegrayart han creado esta preciosa recreación del lanzamiento de cohetes pero reemplazando sus cubiertas por materiales transparentes. De este modo se puede ver cómo está situado cada tipo de combustible en...

El X–37B a punto de ser encerrado en la cofia protectora – Boeing Todo está listo –salvo, quizás, la meteorología– para el primer lanzamiento del Boeing X–37B bajo el mando de la Fuerza Espacial de los Estados (USSF). Los anteriores habían corrido...
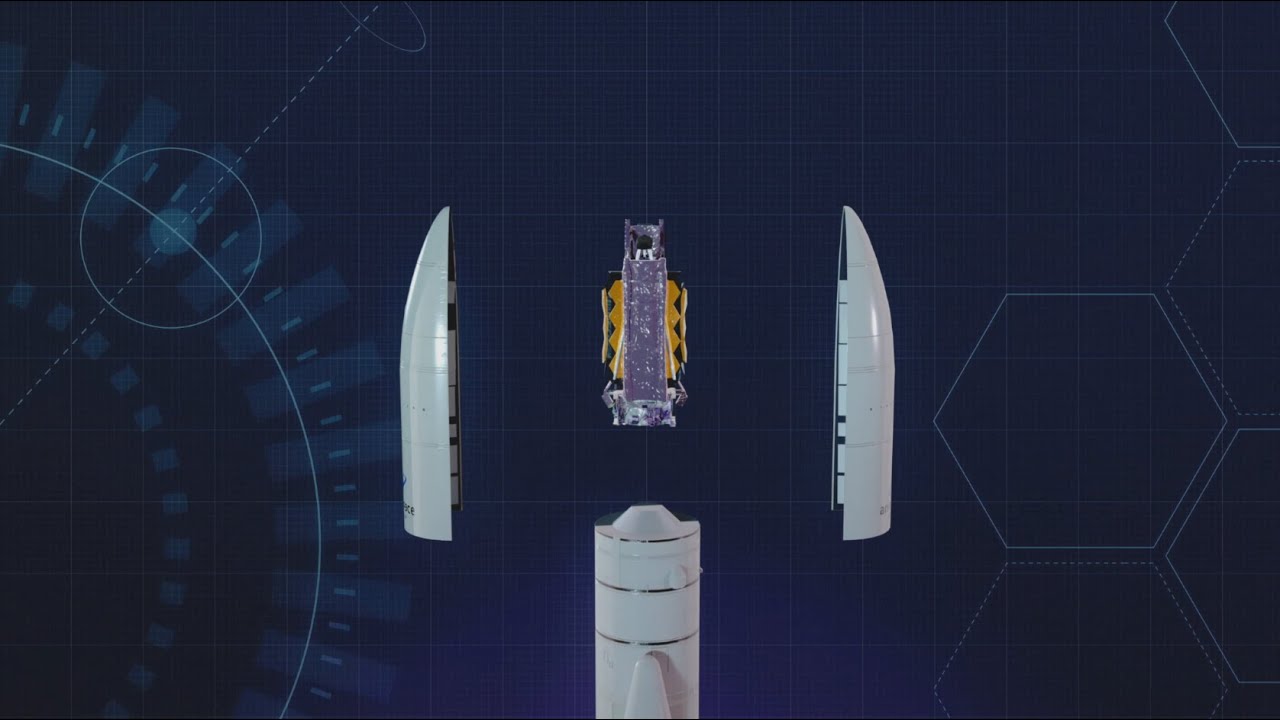
Últimamente los lanzamientos espaciales –es rara la semana en la que no hay al menos uno– están empezando a parecer rutinarios. Pero distan de serlo. Hay un montón de pasos que hay que dar correctamente para que todo salga bien. Y...
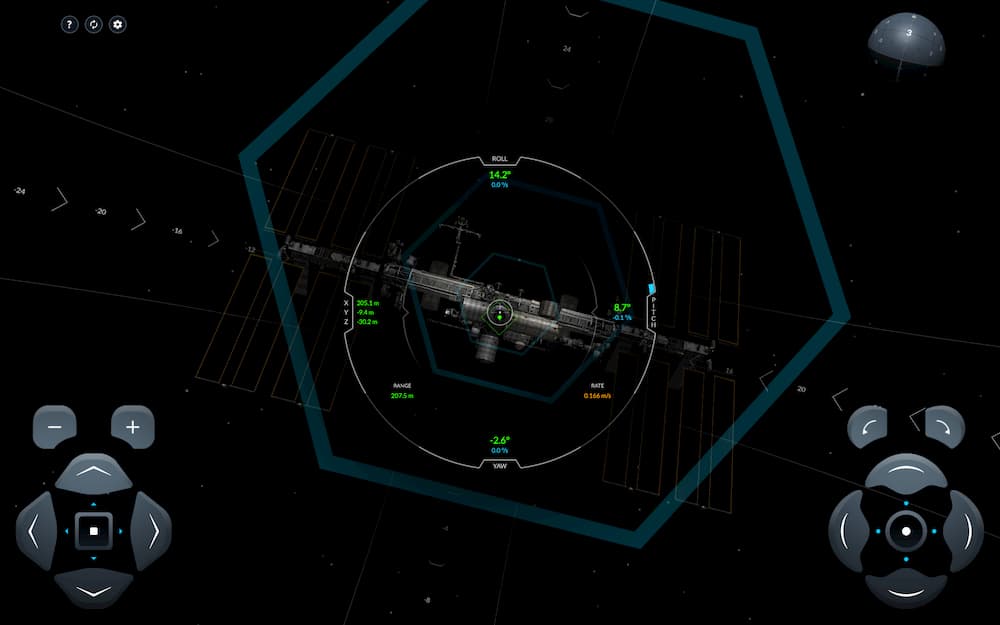
Simulador de atraque de una Crew Dragon en la EEI – SpaceX A dos semanas del lanzamiento de la primera cápsula Crew Dragon tripulada rumbo a la Estación Espacial Internacional SpaceX acaba de publicar un simulador del atraque de la cápsula en...

La semana pasada Bob Behnken y Doug Hurley terminaron su entrenamiento para la Demo-2, la primera misión tripulada de una Crew Dragon. En ella los dos viajarán a la Estación Espacial Internacional (EEI) en la nueva cápsula tripulada de SpaceX. Es...

新一代载人飞船着陆东风着陆场现场画面。#LongMarch5B #CMS #LM5B @hanipersian @LaunchStuff @Kaynouky @ArthurSauzay @AngelaOCISLY @Astro_Danyboy @TheElegant055 pic.twitter.com/rpMutJjIIB— 纳慕斯的湖畔 #CNSA TV评论员 (@NamusLake) May 8, 2020 Tras ser puesta en órbita el pasado día 5 por el primer cohete Larga Marcha 5B el prototipo de la nueva cápsula espacial tripulada...

El 6 de mayo de 2002 se fundaba Space Exploration Technologies Corp., con dirección en Rocket Road 1, Hawthorne, California. Aunque la conocemos más por su nombre comercial, SpaceX. Así que hoy se convierte en mayor de edad en muchos países...
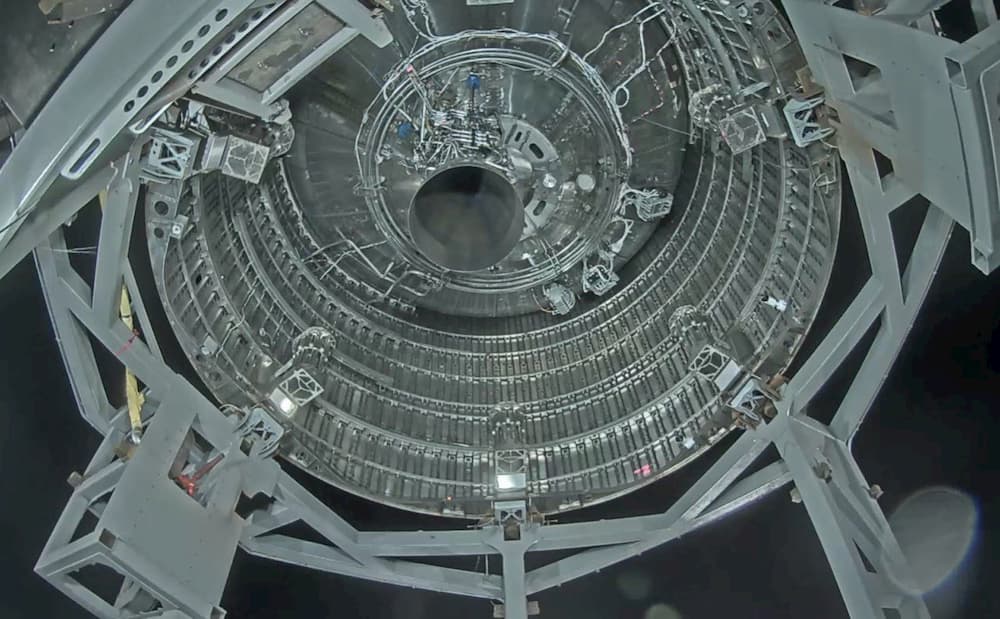
Starship SN4 con un motor - Elon Musk Con la velocidad a la que SpaceX está fabricando –y destrozando, todo sea dicho– prototipos de Starship y con la velocidad no menos apabullante con la que cambia de planes es un poco difícil...

#BREAKING The launch of China's Long March-5B rocket, carrying an experimental spacecraft to space, is successful. pic.twitter.com/buMKcei8Fg— CGTN (@CGTNOfficial) May 5, 2020 El programa espacial tripulado chino ha dado un importante paso adelante con el lanzamiento con éxito del primer cohete Larga...
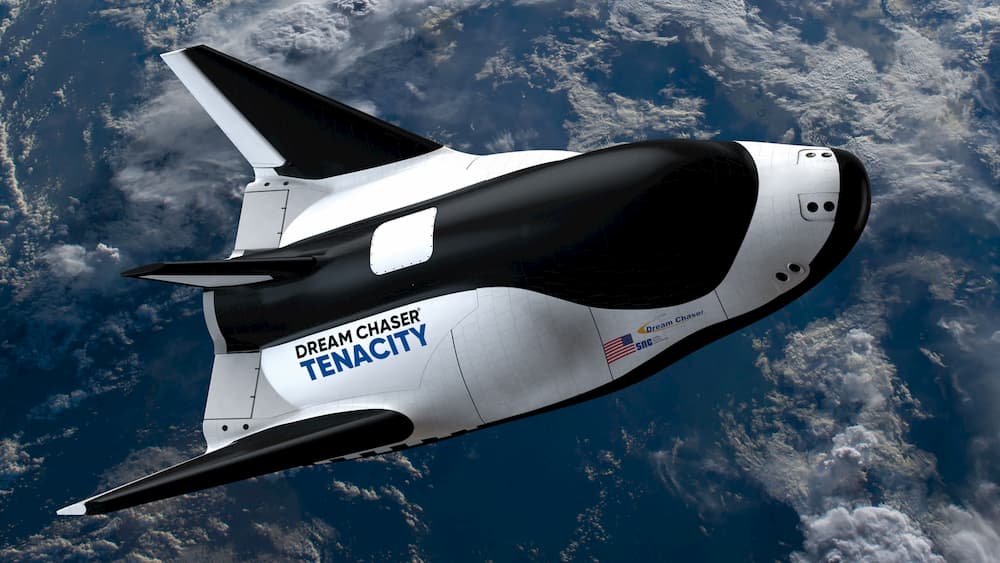
Imprsión artística de tenacity en el espacio – SNC Sierra Nevada Corporation (SNC) ha anunciado que el primer Dream Chaser que lanzará al espacio como vehículo de carga para la NASA se llamará Tenacity, Tenacidad. El Dream Chaser es un avión espacial...

LM-5B seems launch on 5th May at 18:00-19:00【BJT】 pic.twitter.com/KFyOg3LuaM— liuyi (@LiuyiYiliu) April 29, 2020 Todavía no hay confirmación oficial de la hora pero los avisos emitidos a navegantes por las autoridades chinas indican que el primer lanzamiento de un cohete Larga Marcha...

Astronauta de la NASA sobre la Luna – NASA La NASA acaba de anunciar que ha escogido tres empresas para el desarrollo del aterrizador que permitirá a las tripulaciones del programa Artemisa volver a la superficie de la Luna. Éstas son Blue...
Vaneeza Rupani, una estudiante de primer curso del instituto Tuscaloosa County de Alabama, ha sido quien ha propuesto Ingenuity, el nombre que la NASA ha escogido para el helicóptero (o más bien dron) que acompañará al rover Perseverance en su viaje...

Pandemia de COVID–19 o no la Estación Espacial Internacional (EEI) y su tripulación siguen orbitando la Tierra 16 veces al día. Y para mantener su actividad siguen necesitando el envío de suministros. Así que a las 3:15 del 25 de abril...

Tapestry of Blazing Starbirth muestra la nebulosa gigante NGC 2014 y su vecina NGC 2020. Juntas forman parte de una vasta región de formación de estrellas en la Gran Nube de Magallanes, una galaxia satélite de la Vía Láctea, situada a unos...

Successful deployment of 60 Starlink satellites confirmed pic.twitter.com/h3e6QmKRue— SpaceX (@SpaceX) April 22, 2020 Con el lote de 60 satélites Starlink puestos en órbita el 22 de abril de 2020 SpaceX ya ha lanzado 422 de éstos. La empresa aumenta así su ventaja...

Aunque hace unas semanas se rumoreaba que sería el 7 de mayo la primera misión tripulada de una cápsula Crew Dragon tiene como fecha oficial de lanzamiento el 27 de mayo de 2020. Es una misión importantísima para la NASA pues...

La Soyuz MS-15 durante su descenso – NASA/GCTC/Andrey Shelepin Un aterrizaje poco después de las 7 de la mañana, hora peninsular española, del 17 de abril de 2020 ponía fin a la misión de la cápsula tripulada Soyuz MS-15 y su tripulación....

El 11 de febrero de 1985 el control de la misión perdió inesperadamente el contacto con la estación espacial Saliut 7, que en esos momentos no estaba habitada. Ante la imposibilidad de retomar el contacto con ella las autoridades soviéticas decidieron...

A las 6:00:42, hora peninsula española, del 14 de abril de 1970 Jim Lovell, el comandante del Apolo 13, transmitía por radio una de las frases más conocidas de la historia de la exploración espacial: «Houston, hemos tenido un problema.» La...

Estos selfies tomados desde el espacio que muestran nuestro planeta, el hogar común que compartimos, en uno de los períodos más preocupantes e inciertos que muchos de nosotros hemos pasado, nos dan una lección de humildad.– Günther Hasinger,Director científico de la...

Tras un lanzamiento sin problemas la cápsula tripulada Soyuz MS-16 atracaba en el módulo Poisk de la Estación Espacial Internacional (EEI) a las 16:13 del día 9 de abril de 2020. Eso son seis horas y ocho minutos después de su...

Impresión artística de la misión durante su sobrevuelo de la Tierra - ESA Lanzada el 20 de octubre de 2018 con destino final Mercurio la misión BepiColombo de la Agencia Espacial Europea (ESA) y de la Agencia Japonesa de Exploración Aeroespacial (JAXA)...

La Soyuz MS-16 en la plataforma de lanzamiento – Roscosmos Todo está listo en el cosmódromo de Baikonur para el lanzamiento de la cápsula tripulada Soyuz MS-16 rumbo a la Estación Espacial Internacional (EEI). Será la primera vez que se lance una...

Foto de archivo de la Dragon 10 instantes antes de su amerizaje – SpaceX Un amerizaje frente a la costa de California a las 20:50 del 7 de abril de 2020 ponía fin a la última misión de una cápsula de carga...
Impresión artística de una Starliner a punto de atracar en la EEI - Boeing Tras el fiasco del primer intento de lanzar una cápsula Starliner a la Estación Espacial Internacional (EEI) Boeing ha anunciado que harán un segundo intento. La primera Starliner...

El Falcon 9 para la misión Demo-2 con el logo del gusano - SpaceX Aunque el logo original de la nasa es el círculo azul con un chirimbolo rojo y el nombre de la agencia en letras blancas en 1975 la NASA...

El tercer prototipo del cohete Starship de SpaceX ha sufrido el mismo destino que el SN1 y esta pasada madrugada ha fenecido durante una prueba. No están claros todavía los motivos pero se especula con que un enfriamiento excesivo del tanque...

Sala principal de control del ESOC – ESA Aunque la Agencia Espacial Europea (ESA) ya había tomado medidas para contener la pandemia de COVID-19 haciendo que la mayor parte de su personal trabajara desde casa hace unos días una de las personas...

Bob Behnken (al fondo) y Doug Hurley durante la simulación - NASA La NASA y SpaceX están completando una serie de simulaciones de cara al lanzamiento de la primera Crew Dragon tripulada hacia la Estación Espacial Internacional (EEI). Durante las más recientes...
Por mucho que Elon Musk se empeñe en decir que Starship estará listo para entrar en servicio en pocos meses esto sucederá más bien en años. Sin embargo SpaceX acaba de publicar el manual del usuario del cohete. Conviene quizás recordar que...

Impresión artística de Cheops en órbita – ESA / ATG medialab Terminada la fase inicial de pruebas en órbita, que comenzó el 7 de enero de 2020, la Agencia Espacial europea y Airbus han declarado el telescopio espacial Cheops listo para empezar...

Sala de control del ESOC Con el objetivo de proteger mejor del coronavirus a las personas que trabajan en el Centro de Control de Operaciones Espaciales (ESOC) de Darmstadt la Agencia Espacial Europea (ESA) ha tomado la decisión de poner en modo...

Impresión artística de una Dragon XL en órbita terrestre – SpaceX Con unos meses de retraso sobre lo previsto inicialmente y cuando ya casi se daba el tema por olvidado la NASA ha anunciado que ha contratado con SpaceX el diseño y...
Impresión artística de un satélite OneWeb en órbita - OneWeb Tal y como adelantaba Bloomberg hace unos días OneWeb se ha declarado en bancarrota. Lo hace bajo el capítulo 11 de la Ley de Quiebras de los Estados Unidos, lo que quiere...

El primer Rocket 3.0 en la plataforma - Astra Después de no conseguir ganar el Desafío de lanzamiento de la DARPA a principios de marzo la empresa Astra Space dijo que intentaría lanzar de todos modos su cohete Rocket 3.0. Ese intento,...

Las dos partes del Telescopio Espacial James Webb por fin ensambladas en junio de 2019 – NASA/Chris Gunn Era un poco una cuestión de tiempo pero el trabajo en el Telescopio Espacial James Webb (JWST) también se ha visto afectado por el...

Despegue del cohete - Roscosmos Tras un lanzamiento sin problemas OneWeb ya ha establecido contacto con los 34 nuevos satélites puestos en órbita ayer. Fueron colocados en una órbita casi polar de 450 kilómetros de altitud. Usarán sus propulsores para subir a...
False Steps: The Space Race as It Might Have Been por Paul Drye. 1,99$. 206 páginas. A lo largo de la era espacial –e incluso antes de que empezara– ha habido montones y montones de diseños de naves espaciales de todo tipo...

El cohete en la plataforma de lanzamiento - OneWeb Todo está listo en el Cosmódromo De Baikonur para que Arianespace lleve a cabo el lanzamiento del tercer lote de satélites de la constelación OneWeb de acceso a Internet. Está previsto para las...
Según se va extendiendo por los Estados Unidos el coronavirus (bueno, ya sabéis, el SARS-CoV-2, el virus que provoca la enfermedad COVID-19) la NASA se ha ido viendo en la necesidad de tomar medidas al respecto. El pasado 17 de marzo...

El primer Larga Marcha 7A en la plataforma de lanzamiento - China Aerospace Science and Technology Corp (CASC) El pasado 16 de marzo de 2020 China lanzó su primer Larga Marcha 7A. Es una variante del Larga Marcha 7 que usa la...

La primera etapa número B1048 de Falcon 9 bloque 5 no hará un sexto viaje al espacio. Durante el lanzamiento del sexto lote de satélites Starlink uno de sus motores falló, por lo que tuvo que compensar la pérdida de potencia...

El cohete en la plataforma – SpaceX Después de tener que cancelar, literalmente, el primer intento de lanzamiento en el último segundo –o en el primero, según se mire– SpaceX va a intentar de nuevo poner en órbita el quinto lote de...

Vista aérea de Kourou - ESA Otra víctima colateral del coronavirus COBID-19 ha sido la actividad de lanzamientos desde el Centro Espacial Guayanés, también conocido informalmente como el espaciopuerto de Kourou. Tal y como se puede leer en COVID-19: Guiana Space Center...

Justo cuando había terminado la cuenta atrás el ordenador de a bordo del Falcon 9 que tenía que poner en órbita un nuevo lote de satélites Starlink detectó un problema con los motores y abortó el lanzamiento. Dado que la ventana...
El cohete en la plataforma – SpaceX Todo está listo en el Complejo de lanzamiento 39 del Centro Espacial Kennedy para que SpaceX lance un nuevo lote de 60 satélites Starlink. Es el quinto lote de satélites de producción, al que hay...
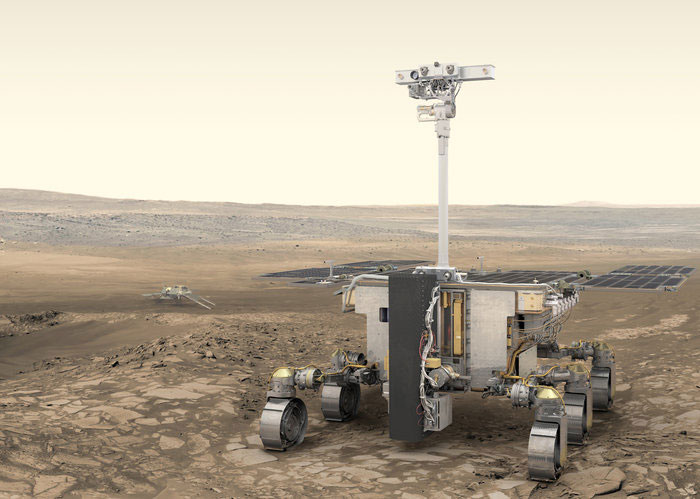
Impresión artística del rover de la misión en Marte - ESA Como se veía venir la Agencia Espacial Europea y Roscosmos han decidido aplazar el lanzamiento del rover Rosalind Franklin de la misión ExoMars a 2022. Los paracaídas, el software de a...

El N1 fue el cohete con el que el programa espacial soviético pretendió llegar a la Luna. Pretendió porque los cuatro lanzamientos de este pedazo de bicho fracasaron. Y entre eso y que los Estados Unidos ya habían conseguido llegar a...
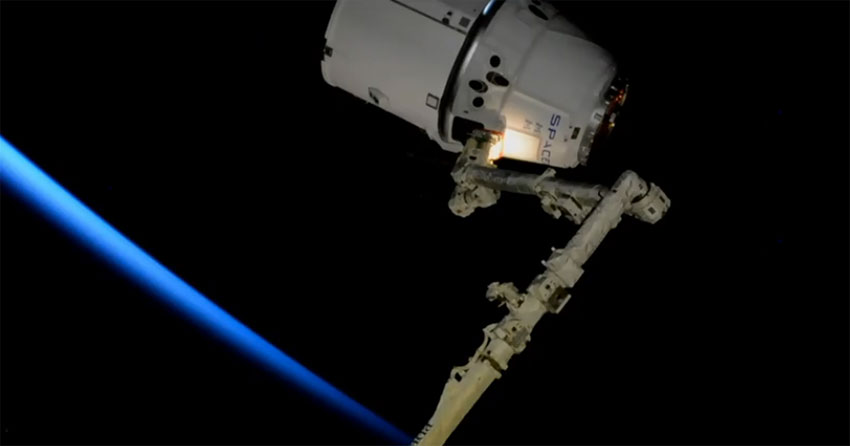
Captura de la Dragon 20 – NASA TV En la mañana del 9 de marzo de 2020 el brazo robot de la Estación Espacial Internacional, manejado por Jessica Meir, capturaba por última vez una cápsula de carga Dragon de SpaceX. La captura...

Tal y como estaba previsto un Falcon 9 bloque 5 despegaba a las 5:50, hora peninsular española, del Complejo de lanzamiento 40 de Cabo Cañaveral con la última cápsula de carga Dragon como carga útil. Van a bordo de ella 2.600...
En este vídeo de Cheddar se explican algunas de las ideas que circularon al inicio de la Guerra Fría acerca de la construcción de una gigantesca estación espacial militar para lograr la «dominancia total sobre el planeta» por parte de los...

Marcas de las misiones anteriores de la cápsula – SpaceX Tras haber cambiado la segunda etapa del cohete por otra al haber detectado un fallo en uno de sus componentes durante las pruebas previas al lanzamiento todo está listo en el Complejo...

La Starliner en la plataforma – NASA La NASA y Boeing han celebrado una teleconferencia en la que han hecho públicas las conclusiones del comité independiente que analizó los fallos de la primera misión de una cápsula tripulada Starliner. El comité los...
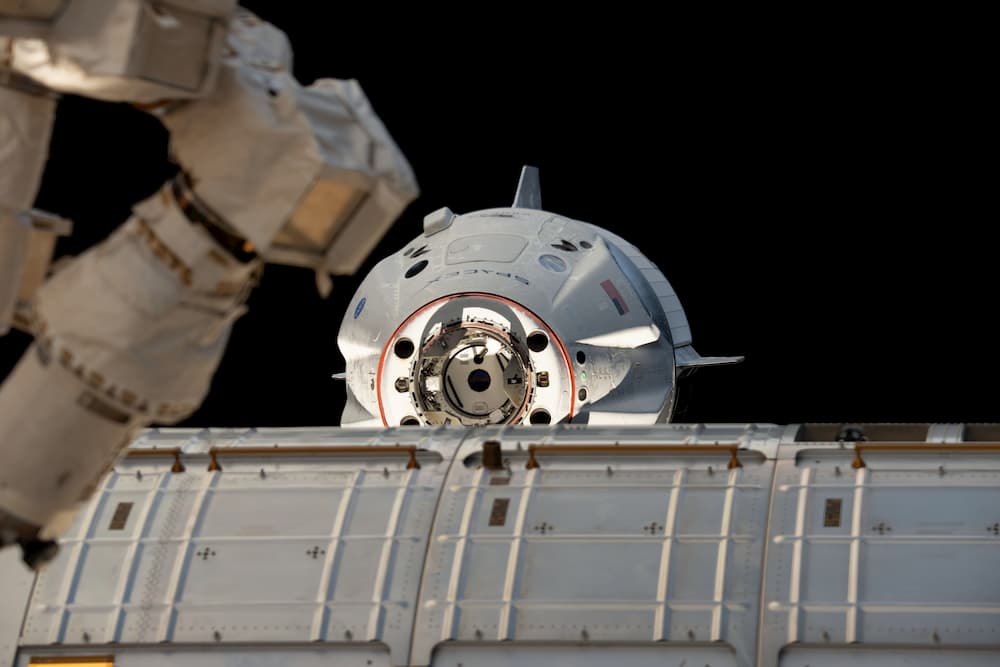
Una Crew Dragon llegando a la EEI – Vía Axiom Space Aunque la NASA ha contratado con SpaceX el uso de la Crew Dragon para llevar sus astronautas a la Estación Espacial Internacional nada impide a la empresa de Elon Musk usar...
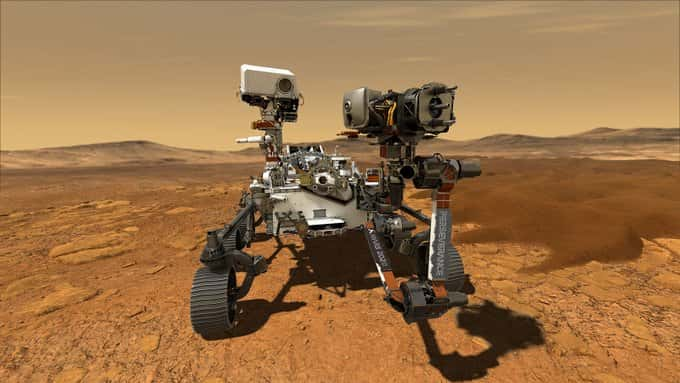
Alexander Mather, un estudiante de 13 años de Virginia, fue el que propuso el nombre Perseverance (Perseverancia) para el rover hasta hace unos minutos conocido como Mars 2020. El ensayo con el que acompañó su propuesta dice: Curiosity (Curiosidad). InSight (Conocimiento)....
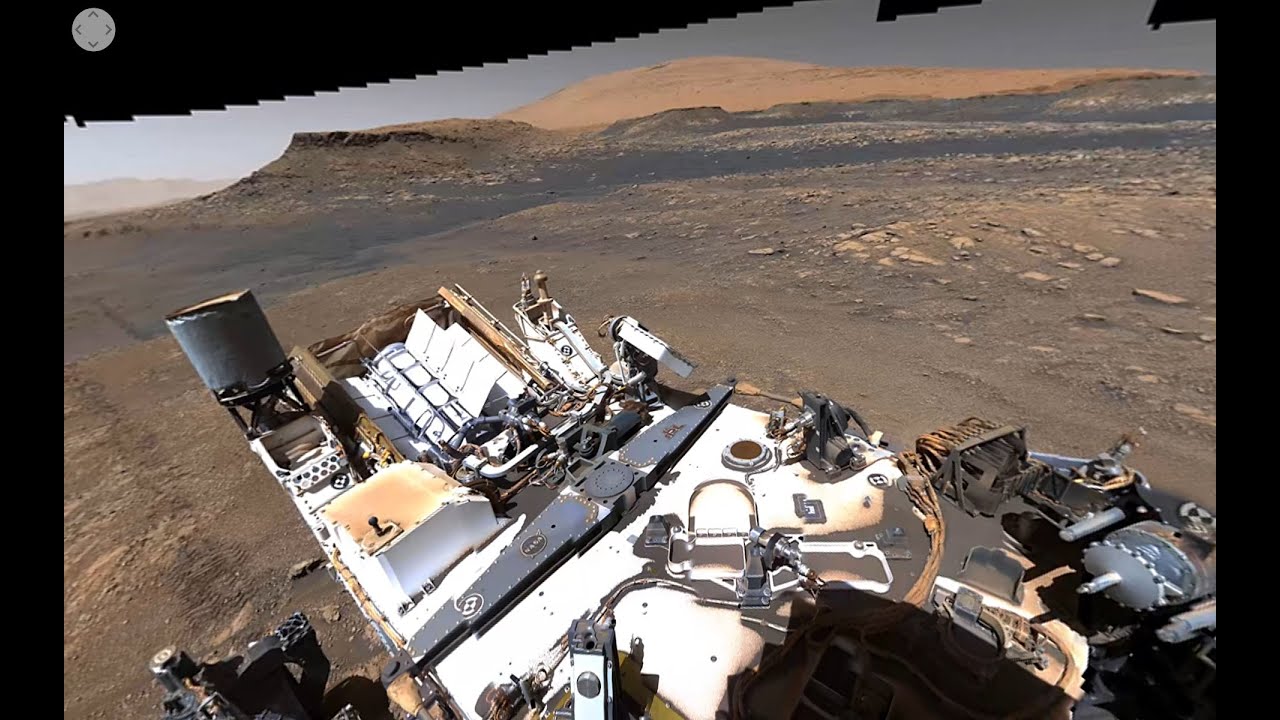
Entre el 24 de noviembre y el 1 de diciembre de 2019 Curiosity estuvo parado en un paraje bautizado como Glen Torridon mientras su equipo se iba de vacaciones de Acción de Gracias. Pero como el sindicato de roboces todavía no...

Impresión artística del WFIRST – NASA A mediados de 2012 la NASA se encontró en posesión de un regalo medio envenenado que le hizo la NRO (National Reconnaissance Office, Agencia nacional de reconocimiento). Se trataba de dos telescopios espaciales de 2,4 metros...
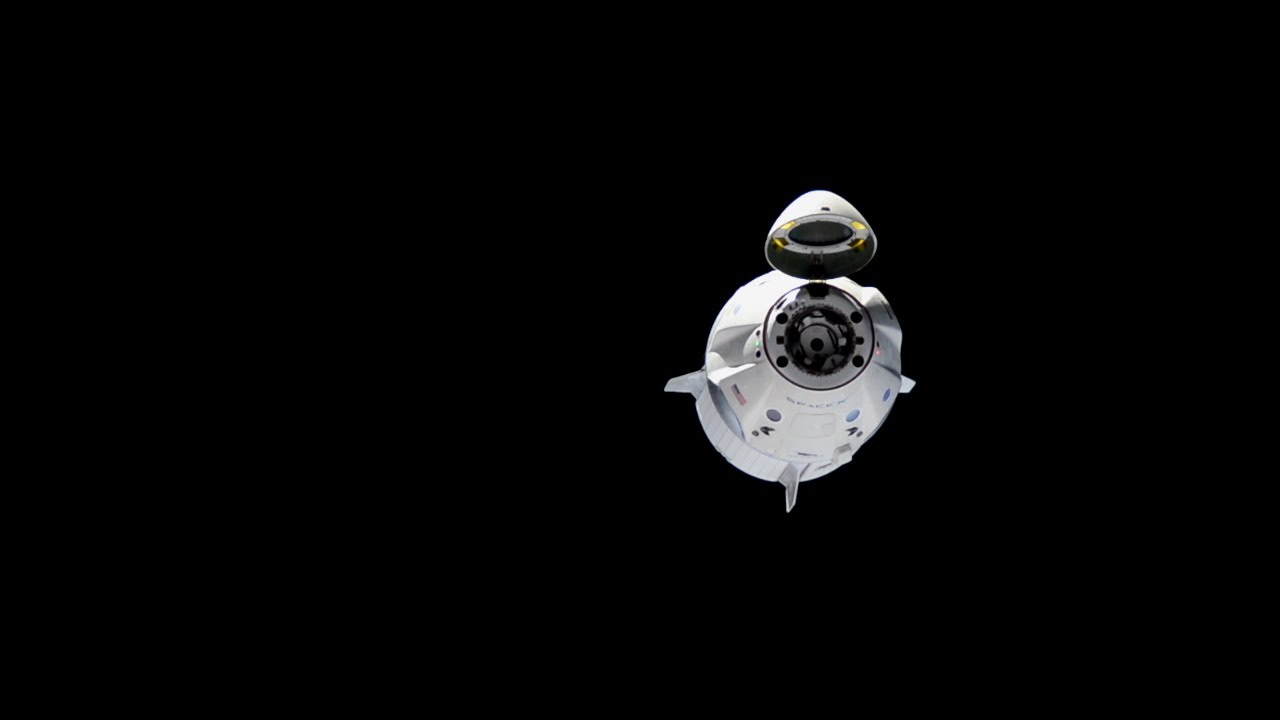
Hoy se cumple un año de la llegada de la primera Crew Dragon a la Estación Espacial Internacional. Era una misión de prueba, así que no iba nadie a bordo, aunque llevaba a bordo a Ripley, un maniquí instrumentado, y un...

1 of 3 en la plataforma de lanzamiento – DARPA Datos extraños de un sensor del cohete 1 of 3 de Astra Space obligaron a parar la cuenta atrás 53 segundos de su lanzamiento. Y como la empresa no pudo solucionar el...

No siempre van tan seguidos pero ahora que la promoción de astronautas de la NASA de 2017 acaba de graduarse la agencia acaba de anunciar un nuevo proceso de selección. Desde hoy mismo al 31 de marzo de 2020 cualquiera que...

Según cuenta Todd Master, el responsable del Desafío de lanzamiento de la DARPA, cuenta en Esta actualización que aunque As Astra tenía todo listo para el lanzamiento el 29 de febrero la meteorología obligó a posponerlo. Había nubes demasiado bajas y...

Una prueba de llenado de los tanques de combustible del Starship SN1 en las instalaciones de SpaceX en Boca Chica terminó de forma inesperada con la destrucción del prototipo. El tanque estaba siendo llenado con nitrógeno líquido. Ha sufrido una suerte...

Rocket 3.0 en la plataforma – DARPA Astra Space, que ha estado desarrollando su cohete Rocket 3.0 sin darse mucha publicidad, está a punto de intentar su primer lanzamiento orbital. El lanzamiento forma parte del Desafío de lanzamiento de la DARPA, la...

La futura torre de servicio del Complejo de lanzamiento 39A – vía FAA La Autoridad Federal de Aviación (FAA) de los Estados Unidos acaba de publicar el borrador de un informe de impacto ambiental que ha preparado acerca de las actividades de...
El primer fallo de la misión se produjo al separarse la Starliner de la segunda etapa del Atlas V - Boeing Según se puede leer en Boeing didn’t perform full end-to-end test of its astronaut capsule before troubled mission, ‘surprising’ NASA safety...

No tenía en mi radar la misión del satélite MEV-1 de Northrop Grumman pero me parece un notición: el pasado martes se acoplaba al Intelsat 901, lanzado en 2001 y que se está quedando sin combustible, con el objetivo de actuar...

El AMS-02 – NASA Entre noviembre de 2019 y enero de 2020 Andrew Morgan de la NASA y Luca Parmitano llevaron a cabo cuatro paseos espaciales para reparar el Espectrómetro Magnético Alfa (AMS, siendo estrictos AMS-02). Es un instrumento que está instalado...

Después de una primer intento en el que el motor reventó PDL Space, tras rediseñarlo, ha conseguido al fin hace un encendido completo del motor Teprel-B que propulsará su cohete Miura 1. 120 segundos, dos minutos, es lo que necesitan para...
Impresión artística del rover de la misión en Marte - ESA La Agencia Espacial Europea y Roscosmos acaban de anunciar una rueda de prensa conjunta para el próximo 12 de marzo en la que hablarán de la misión ExoMars 2020 y de...

Thikonov y Babkin durante su entrenamiento - Roscosmos Cuando por fin parecía que por fin Nikolai Tikhonov iba a despegar en su primera misión un desafortunado golpe en un ojo con una rama mientras daba un paseo va a hacer que tenga...

Katherine Johnson (1918-2020), la matemática que desafió al racismo y a los ordenadores.

My robotic mole has had a hard time getting underground, so I’m going to try something we never thought we’d do: giving it a push with my robotic arm while it hammers. This will take several weeks, as the @NASAJPL/@DLR_en team works...
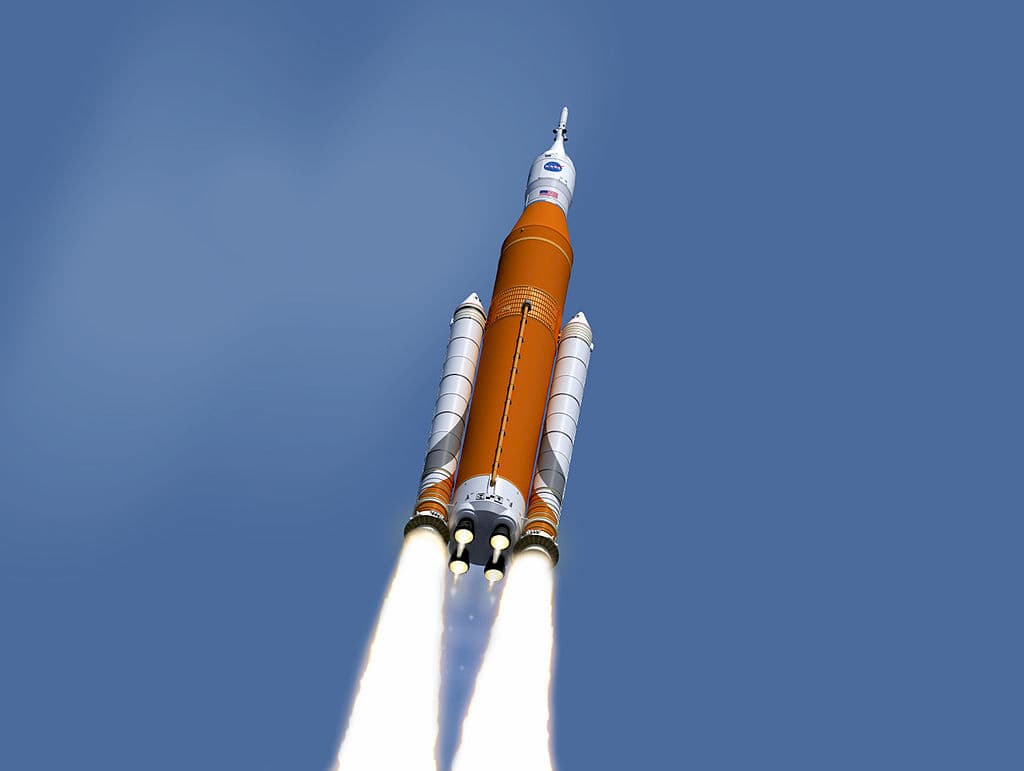
Impresión artística del SLS despegando - NASA No es que sea una gran sorpresa pero el primer lanzamiento del Space Launch System (SLS), el gran cohete de la NASA que servirá, entre otras cosas, para llevar de nuevo misiones tripuladas a la...
En otro de sus llamativos vídeos Álvaro Gracia de MetaBallStudios pone en contexto el tamaño de algunos de los más conocidos asteroides que pululan por el Sistema Solar comparándolos con el tamaño de una casa, la Torre Eiffel o la ciudad...

Operado por el CNES –el Centro Nacional de Estudios Espaciales, la NASA francesa para entendernos– y financiado por la Agencia Espacial Europea el espaciopuerto de Kourou es el punto de lanzamiento para la mayoría de las misiones espaciales europeas y para...
Aunque la comunidad espaciotrastornada está pendiente del lanzamiento de la primera cápsula Crew Dragon tripulada rumbo a la Estación Espacial Internacional con dos astronautas de la NASA a bordo no hay que olvidar que la agencia espacial estadounidense no es la...

La Cygnus 13 en aproximación a la EEI - NASA/Jessica Meir Tras una aproximación sin problemas la cápsula de carga Cygnus 13 «S.S. Robert H. Lawrence» aparcaba hoy a 12 metros de la Estación Espacial Internacional. Desde esa posición de espera fue...

SpaceX ha conseguido colocar en órbita 60 satélites más de la constelación Starlink de acceso a Internet. Con esto ya tiene 302 en órbita y aumenta su ventaja como operador del mayor número de satélites del mundo. Y como una de...

Esta animación creada por el JPL de la NASA muestra tiene –como en el chiste– una buena y una mala noticia. La mala es que hay miles y miles de asteroides dando vueltas por el Sistema Solar y de vez en...

El Falcon 9 del lanzamiento Starlink anterior en la plataforma – SpaceX SpaceX tiene todo preparado en el Complejo de Lanzamiento 40 de cabo Cañaveral para lanzar un nuevo lote de satélites de su constelación Starlink de acceso a Internet. Con otros...

Despegue de la Cygnus 13 - NASA A la tercera ha sido la vencida y por fin la cápsula de carga Cygnus 13 «S.S. Robert H. Lawrence» fue lanzada hacia la Estación Espacial Internacional el 15 de febrero de 2020. A bordo...

En la Breakthrough Listen Initiative ya se pueden descargar cerca de 2 petabytes de datos capturados por el proyecto SETI de Berkeley como parte de la búsqueda de señales de vida inteligente en el universo. Quien tenga paciencia y una buena...

La Cygnus 13 en la plataforma de lanzamiento - NASA Wallops La cápsula de carga Cygnus 13 (oficialmente NG-13 o CRS-13) está lista de nuevo para su lanzamiento hacia la Estación Espacial Internacional desde la Plataforma 0A del complejo de lanzamiento Wallops...

VSS Unity portado por su avión nodriza VMS Eve sobrevolando el espaciopuerto - Virgin Galactic Tras completar el traslado de las aproximadamente cien personas que tenían que mudarse y contratar localmente el resto de los puestos que necesitaba cubrir Virgin Galactic ya...

Impresión muy artística del sistema solar - NASA La NASA acaba de anunciar cuatro nuevas misiones finalistas para los próximos lanzamientos del Programa Discovery. Estas son, por orden alfabético. Los enlaces van a Eureka, el blog de Daniel Marín: DAVINCI+ (Deep Atmosphere...
Impresión artística de un astronauta en la Luna durante una de las misiones Artemisa - NASA Aunque hace apenas un par de semanas el la comisión del Congreso de los Estados Unidos que se encarga de establecer el presupuesto de la NASA...

Aún puede cambiar de aquí a entonces pero SpaceX y la NASA están trabajando con el 7 de mayo de 2020 como fecha de lanzamiento de la primera misión tripulada de una Crew Dragon rumbo a la Estación Espacial Internacional. A...

Se ha dicho miles o millones de veces aquello de que cualquier teléfono móvil actual –en realidad ya desde hace años– es más potente que el ordenador de las naves del programa Apolo*, esas que nos llevaron a la Luna. Pero la...

Pues una vez más (y este era el tercer intento) no ha podido ser: el cohete Simorgh que tenía que haber puesto en órbita el satélite Zafar 1 no funcionó correctamente. Zafar 1 era un satélite de observación terrestre que tenía...
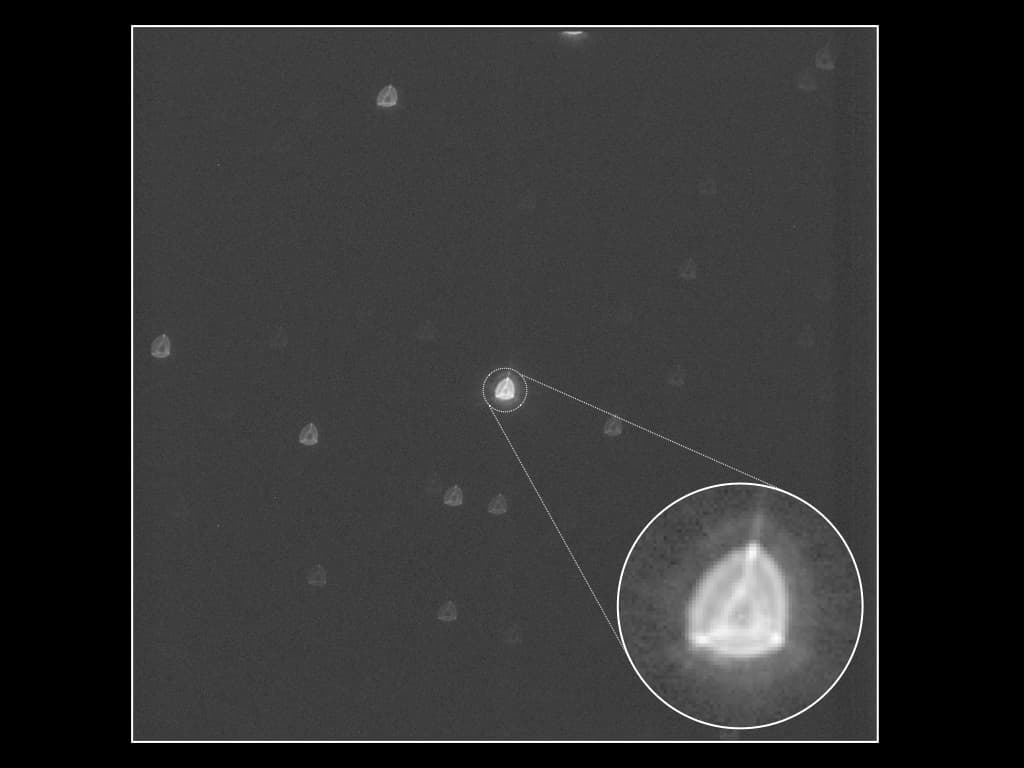
Primera imagen obtenida por el telescopio espacial Cheops - ESA/Airbus/CHEOPS Mission Consortium Después de haberle enviado la orden para abrir la tapa de su objetivo –que en realidad es un telescopio Ritchey-Chrétien de 30 cm de apertura y 1,2 m de longitud–...

Despegue del Solar Orbiter - ESA Tal y como estaba programado el Solar Orbiter de la Agencia Espacial Europea ESA) y la NASA despegaba rumbo al Sol a bordo de un cohete Atlas V a las 5:03 del 10 de febrero de...

La primera Starliner en ir al espacio tras su fallida primera misión – NASA El jueves de esta semana el Aerospace Safety Advisory Panel (ASAP, Comité Asesor de Seguridad Aeroespacial) de la NASA hacía su primera reunión de 2020. Es un comité...
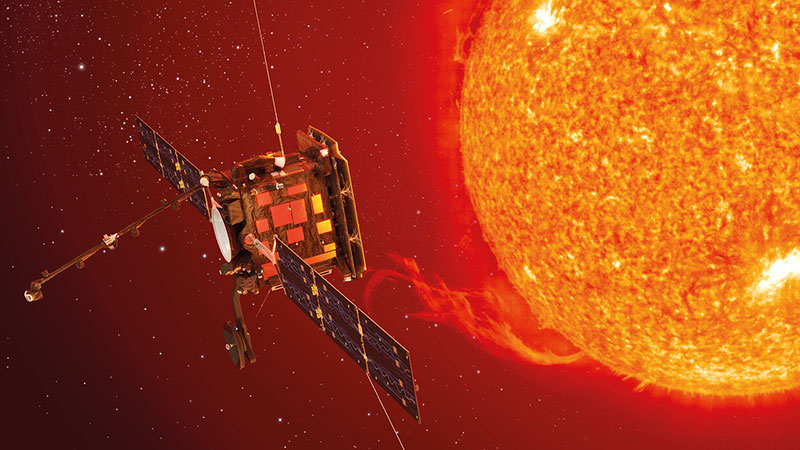
Todo está listo para el lanzamiento del Solar Orbiter de la Agencia Espacial Europea (ESA) y la NASA rumbo al Sol desde el Complejo de lanzamiento 41 de Cabo Cañaveral. Si todo va según lo previsto el lanzamiento se producirá en...

Despegue del cohete - Roscosmos Tal y como estaba previsto un cohete Soyuz-2.1b que despegó dede el Cosmódromo de Baikonur en la noche del 6 de enero de 2020 puso en órbita la primera tanda de 34 satélites de serie de OneWeb....
The Mars Atlas es un proyecto para editar un atlas de nuestro vecino en el sistema solar con 218 detallados mapas de su superficie. Incluye también una historia de la exploración de Marte, un índice alfabético con los más de 2.000...

Aterrizaje de la Soyuz MS-13 - NASA/Bill Ingalls La cápsula espacial tripulada Soyuz MS-13 terminaba su misión con un aterrizaje en las llanuras se Kazajistán a las 10:12, hora peninsular española, del 6 de febrero de 2020. Había empezado con su lanzamiento...

El cohete en la plataforma - Roscosmos Tras sucesivos aplazamientos en noviembre y diciembre de 2019 y otros dos en enero de 2020 todo parece estar listo por fin en el cosmódromo de Baikonur para el lanzamiento del primer lote de satélites...

Larry «RadioHamGuy» es un radioaficionado que se propuso contactar con la Estación Espacial Internacional (ISS) desde su casa y en este vídeo le podemos ver consiguiéndolo. El asunto tiene su truco porque hace falta que los astronautas estén atentos, que la...

En este episodio de una serie sobre los entrenamientos de astronautas del canal de YouTube de la Agencia Espacial Europea Matthias Maurer explica cómo son los cursos de supervivencia. Que, a pesar de lo que se pueda pensar, son más bien...

Rocket Lab, una empresa a la que no hay que perderle la pista gracias a su cohete Electrón, que está revolucionando el mercado de los lanzadores pequeños, ha llevado a cabo con éxito su primer lanzamiento de 2020. La misión, bautizada...
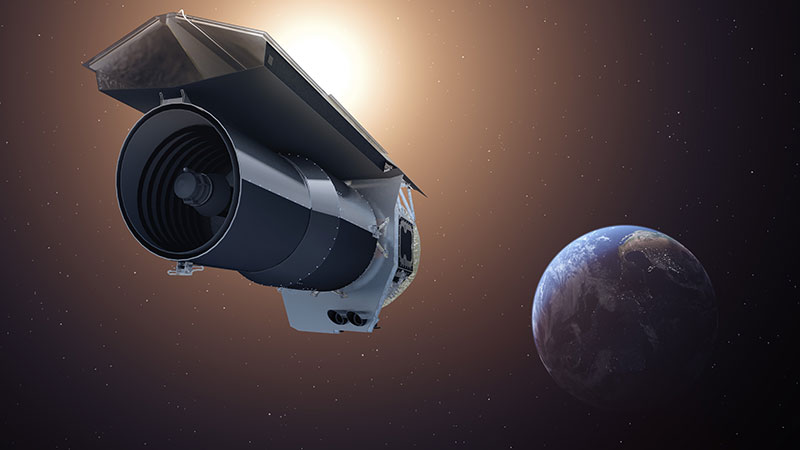
Lanzado el 25 de agosto de 2003 el telescopio espacial Spitzer es uno de los cuatro Grandes Observatorios de la NASA junto con el telescopio espacial Hubble, el observatorio de rayos gamma Compton y el observatorio de rayos X Chandra. Su...
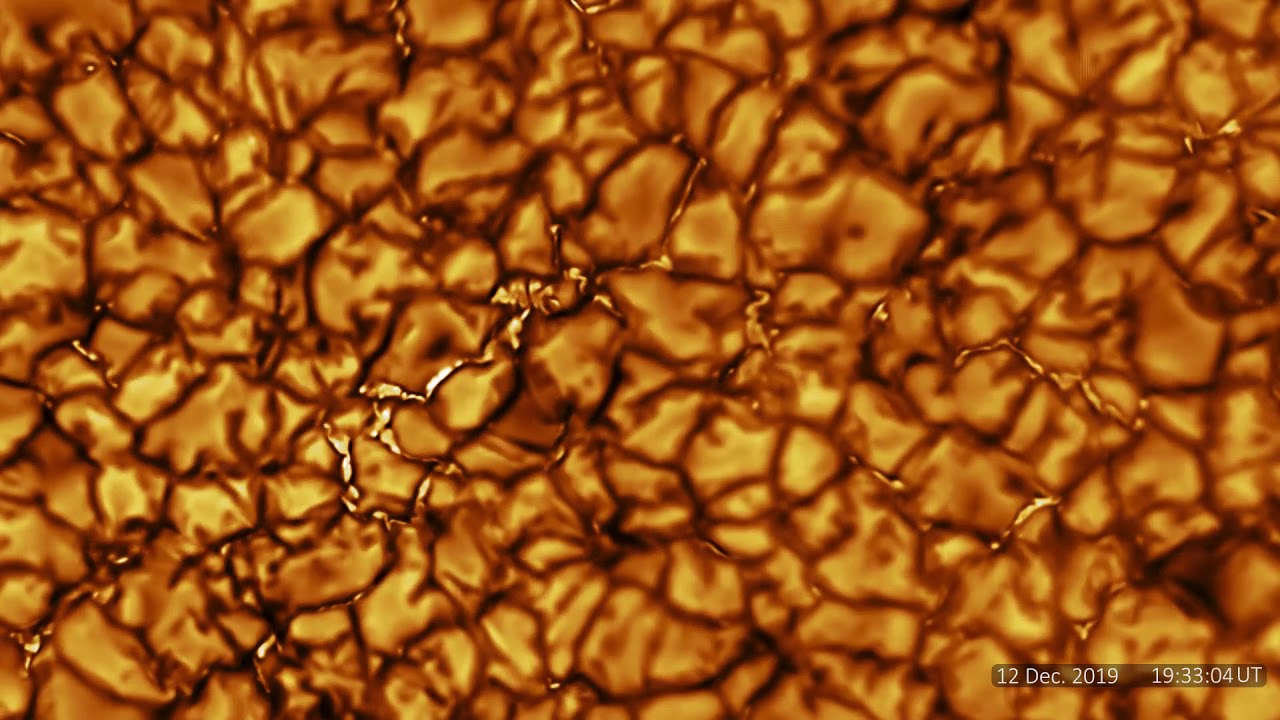
Este es el increíble aspecto que tiene nuestro Sol visto muy, muy ampliado. De hecho las imágenes, de hace unas semanas, están tomadas con cinco veces más resolución que lo máximo que habíamos podido captar hasta desde la Tierra. Es la...
Las dos partes del Telescopio Espacial James Webb por fin ensambladas en junio de 2019 – NASA/Chris Gunn Sorprendiendo aproximadamente a nadie el último informe del interventor general de Estados Unidos sobre la situación del telescopio espacial James Webb dice que lo...
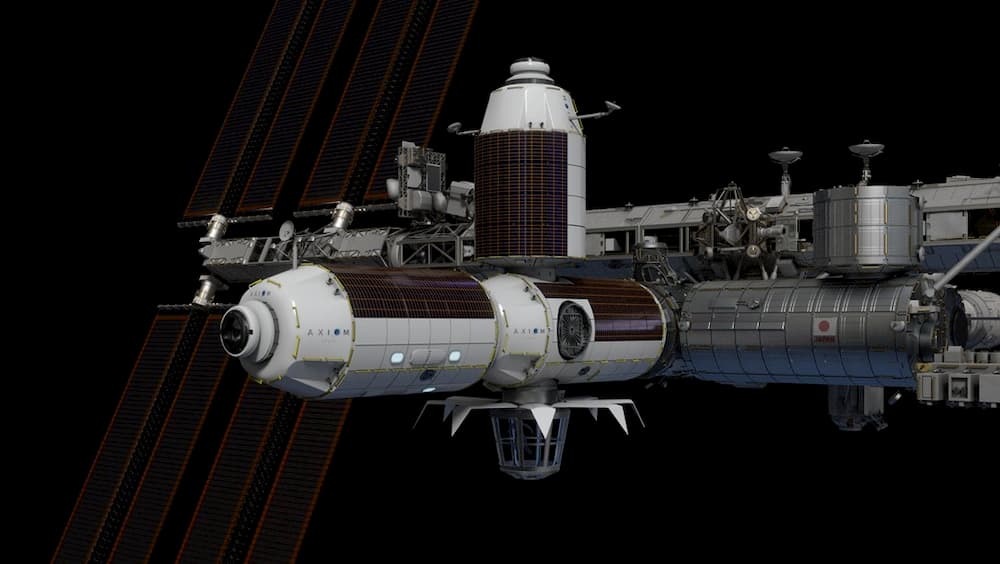
Los módulos de Axiom Space acoplados a la EEI – Axiom Space Dentro de sus planes para ir abriendo al uso comercial la Estación Espacial Internacional la NASA acaba de anunciar que ha seleccionado a Axiom Space para permitirles acoplar al menos...
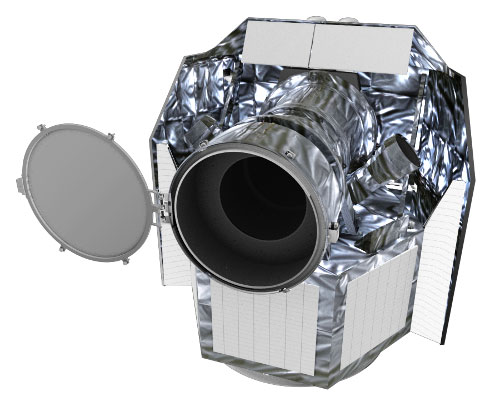
Cheops con la tapa abierta – ESA / ATG medialab Esta mañana a las 7:38, hora peninsular española, se envió desde el Instituto Nacional de Técnica Aeroespacial (INTA) en Madrid el comando al telescopio espacial CHEOPS para que abriera la tapa de...

Con algo más de una semana de retraso debido a que la meteorología no quería colaborar SpaceX ha hecho por fin el lanzamiento de la tercera tanda de satélites Starlink de serie. Han sido dejados en una órbita de 290 kilómetros...
Impresión artística de la PSP cerca del Sol – NASA A eso de las 10:40 del 29 de enero de 2020, minuto arriba, minuto abajo, la Parker Solar Probe de la NASA pasaba por el quinto perihelio de su misión. El perihelio...
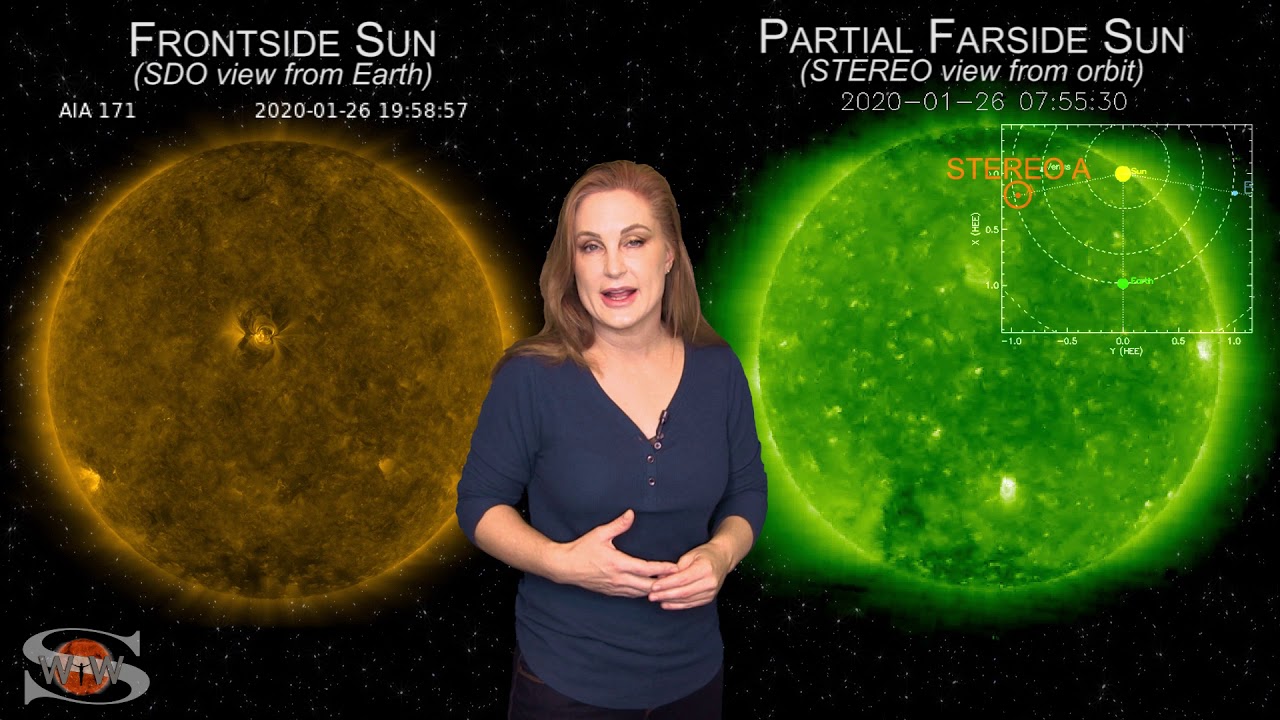
Si Mariano Medina fue el meteorólogos que acuñó aquello de «el hombre del tiempo», Tamitha Skov puede convertirse en «la meteoróloga del espacio», o algo así. Se autodefine como space weather physicist, que sería equivalente a «física del tiempo espacial», entendiendo...

El 25 de junio de 1997 Vasily Tsibliyev se puso frente a la consola TORU que permitía manejar las cápsulas Progress en remoto y tomó el mando de la cápsula de carga Progress M-34 que el día anterior se había desacoplado...
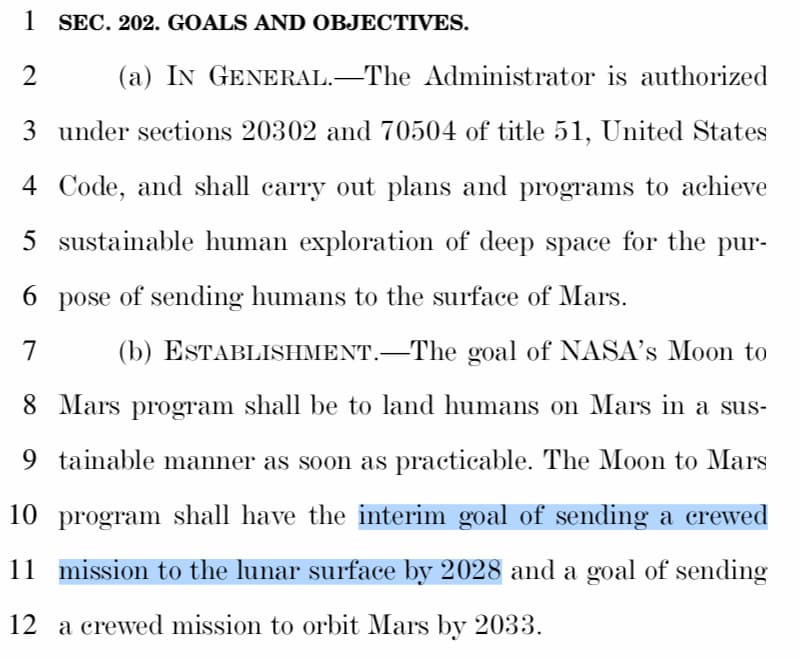
La comisión del Congreso de los Estados Unidos que se encarga de establecer la financiación de la NASA y sus objetivos acaba de aprobar la National Aeronautics and Space Administration Authorization Act of 2020 [PDF]. En el capítulo 10, Goals and objectives,...
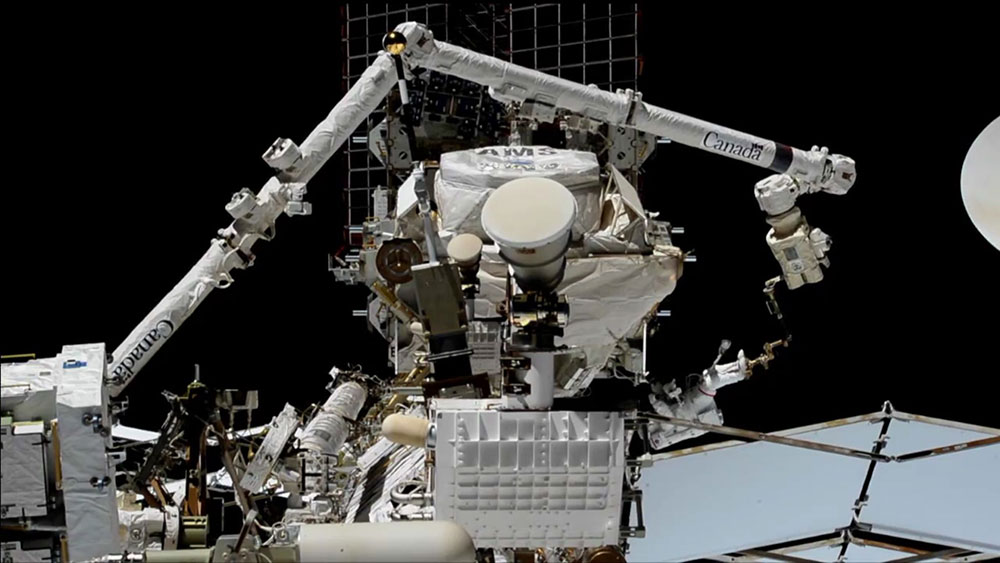
Andrew Morgan trabajando en el AMS - NASA Tras un paseo espacial de seis horas y 16 minutos Andrew Morgan de la NASA y Luca Parmitano de la Agencia Espacial Europea (ESA) terminaron la reparación del Espectrómetro Magnético Alfa (AMS). El instrumento,...

Mientras SpaceX con su constelación de satélites Starlink –ya es la mayor operadora de satélites del mundo– y otras iniciativas como Oneweb o el proyecto Kuiper se lanzan a conquistar la órbita baja y media terrestre hay una propuesta que parece...

Se me había pasado la publicación de Starliner Orbital Flight Test Cabin Camera Views, un vídeo que resume en tres minutos la primera –y fallida, no lo olvidemos– misión de una cápsula Starliner de Boeing. En él se aprecian distintas fases...
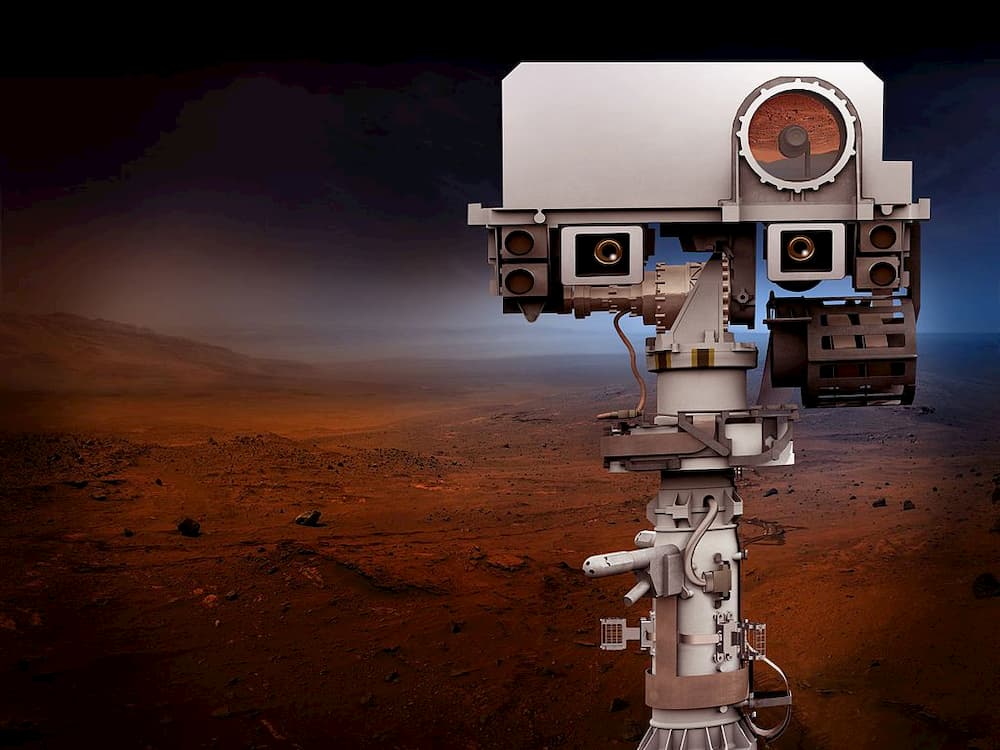
Tras recibir más de 28.000 ensayos de estudiantes de todos los Estados Unidos la NASA ha escogido nueve posibles nombres para el rover Mars 2020, que si todo va según lo previsto será lanzado rumbo a Marte en la ventana que va...

Estábamos esperándola ansiosos desde que a mediados de 2019 Lego confirmara que iba a sacarla al mercado, pero ahora ya tenemos fecha: el 1 de febrero de 2020 sale a la venta el modelo de la Estación Espacial Internacional de Lego....

Jessica Meir a punto de entrar de vuelta en la EEI - NASA En seis horas y 58 minutos las astronautas de la NASA Jessica Meir y Christina Koch terminaron de sustituir las 12 baterías de níquel–hidrógeno del segmento P6 de la...

Aunque aún no tiene nombre ya van emergiendo detalles de la nueva cápsula tripulada china. A diferencia de la Shenzhou, que tiene tres módulos, se trata de un vehículo compuesto por dos módulos, el de servicio y el habitable, aunque la...

Hay todavía que analizar al detalle los datos obtenidos e inspeccionar físicamente la cápsula y los paracaídas pero todo parece indicar que la prueba en vuelo del sistema de escape de la Crew Dragon ha sido todo un éxito. El sistema...

Apenas unos minutos antes de que se abriera la ventana de lanzamiento del 18 de enero SpaceX ha comunicado que se aplaza en al menos 24 horas la prueba en vuelo del sistema de escape de la Crew Dragon. El motivo es...

Impresión artística del momento de la activación del sistema de escape – SpaceX Si todo va según lo previsto en algún momento de una ventana de lanzamiento que va de las 14:00 a las 18:00, hora peninsular española, de mañana, sábado 18...

Quienes sufrimos de espaciotrastorno con toda seguridad hemos visto y disfrutado de sus ilustraciones. Pero aún así el nombre y la historia de Andrei Sokolov [el enlace va a la Wikipedia en ruso, pego Chrome os lo traduce sin problemas] son...

La Starliner Calypso en revisión tras su primera misión – Boeing Tras su viaje por tierra la Starliner bautizada como Calypso por Sunita Williams, quien debería ir a bordo en su primera misión tripulada, ya está en las instalaciones de Boeing en...

A pesar de los problemas que hubo con las luces y la cámara del casco de Christina Koch ella y Jessica Meir consiguieron completar sin problemas las tareas del segundo paseo espacial que llevaron a cabo juntas en la Estación Espacial...

Impresión artística de Vikram posándose en la Luna - ISRO El pasado 7 de septiembre de 2019 la Agencia India de Investigación Espacial (ISRO) perdía el contacto con el aterrizador de la misión Chandrayaan–2 cuando apenas le quedaban unos minutos para posarse...

Después de haber probado con éxito los motores del Falcon 9 modificado que va a utilizar para la prueba de escape de la cápsula tripulada Crew Dragon a SpaceX le queda poco más que acoplarla al cohete y devolver el conjunto...

La promoción de astronautas de 2017 de la NASA, también conocida como Las tortugas - NASA El Grupo de Astronautas 22 de la NASA, informalmente conocido como Las tortugas, se acaba de graduar tras terminar sus dos años de entrenamiento. Son cinco...

Preparando la Calypso para el viaje - NASA Tras los problemas con los que se encontró la Calypso, la primera Starliner en ser lanzada al espacio, durante su misión, problemas que le impidieron tan siquiera intentar atracar en la Estación Espacial Internacional,...

Hace unas semanas la NASA publicaba el vídeo How We Are Going to the Moon en el que explica cómo piensa poner misiones tripuladas en la superficie de la Luna dentro del programa Artemisa. La receta es básicamente coger una cápsula...

La Dragon 19 recién «pescada» - SpaceX Tras casi un mes atracada en la Estación Espacial Internacional la cápsula de carga Dragon 19 terminaba su misión al amerizar frente a la costa de California el 7 de enero de 2020. Trae a...

El lanzamiento número 79 de un Falcon 9 –77 de ellos con éxito– ha permitido a SpaceX poner en órbita de una tacada 60 satélites más de su constelación Starlink. El momento del despliegue se puede seguir una hora y cuarenta...

El cohete en la plataforma – SpaceX SpaceX tiene todo listo para llevar a cabo el primer lanzamiento espacial del año del mundo. Tendrá lugar desde el Complejo de Lanzamiento 40 de Cabo Cañaveral y su carga útil serán 60 satélites de...

Tim Dodd, más conocido como Everyday Astronaut, ha hecho una encuesta entre sus seguidores en diversas plataformas. Y tras cocinar los resultados según su criterio, ya que a fin de cuentas el canal es suyo, estos son los mejores momentos de...
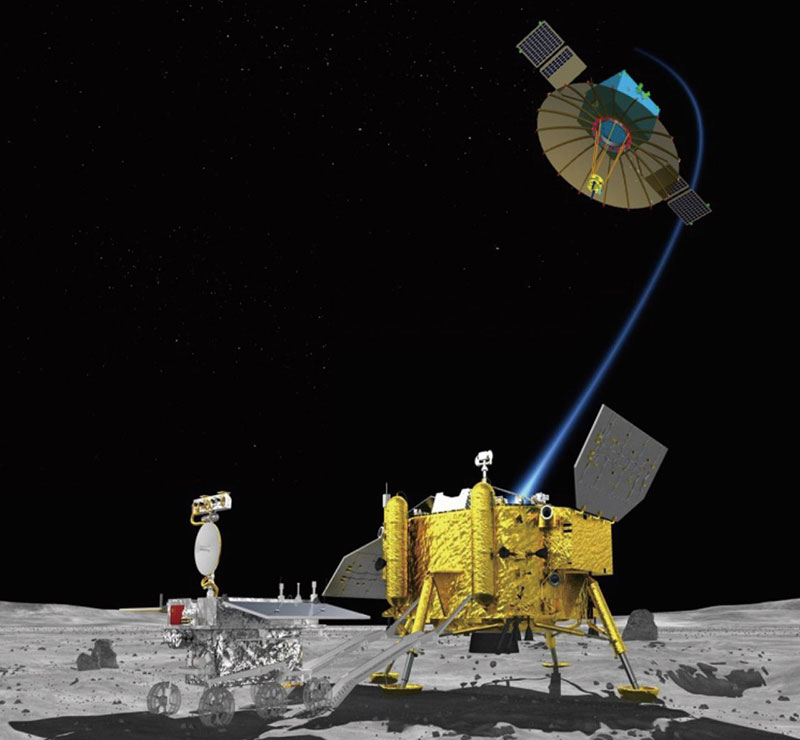
A las 3:26, hora peninsular española, del 3 de enero de 2019 la misión china Chang'e 4 se posaba en el cráter Von Kármán, que a su vez está en la Cuenca Aitken, la segunda mayor estructura del sistema solar causada por...
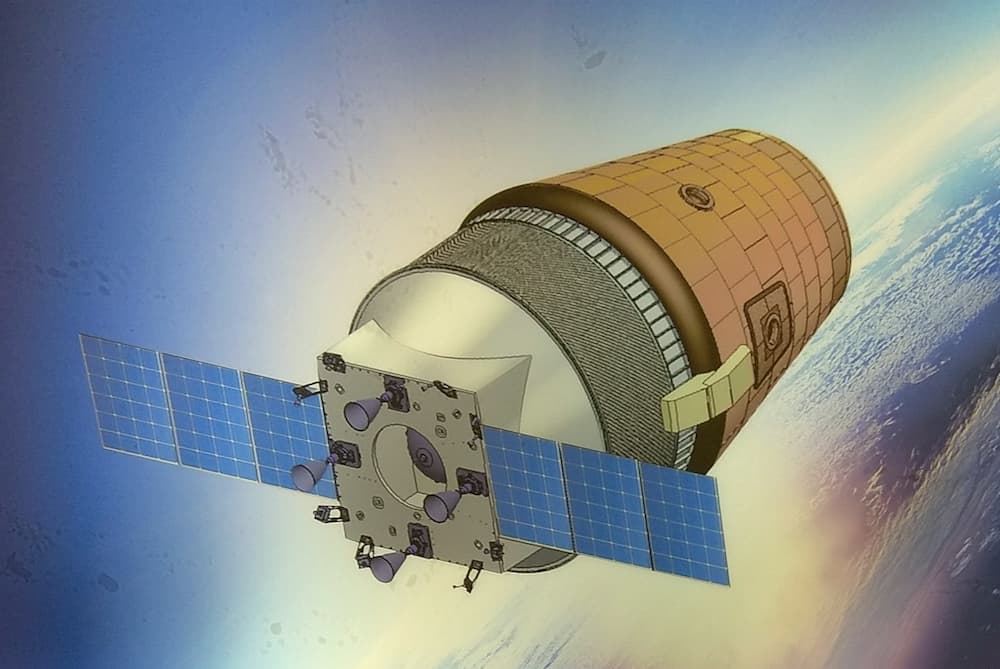
En una rueda de prensa el presidente de la ISRO, la Agencia India de Investigación Espacial, acaba de anunciar la selección de cuatro miembros de las Fuerzas Aéreas para recibir entrenamiento avanzado de cara a la primera misión tripulada del país. El...
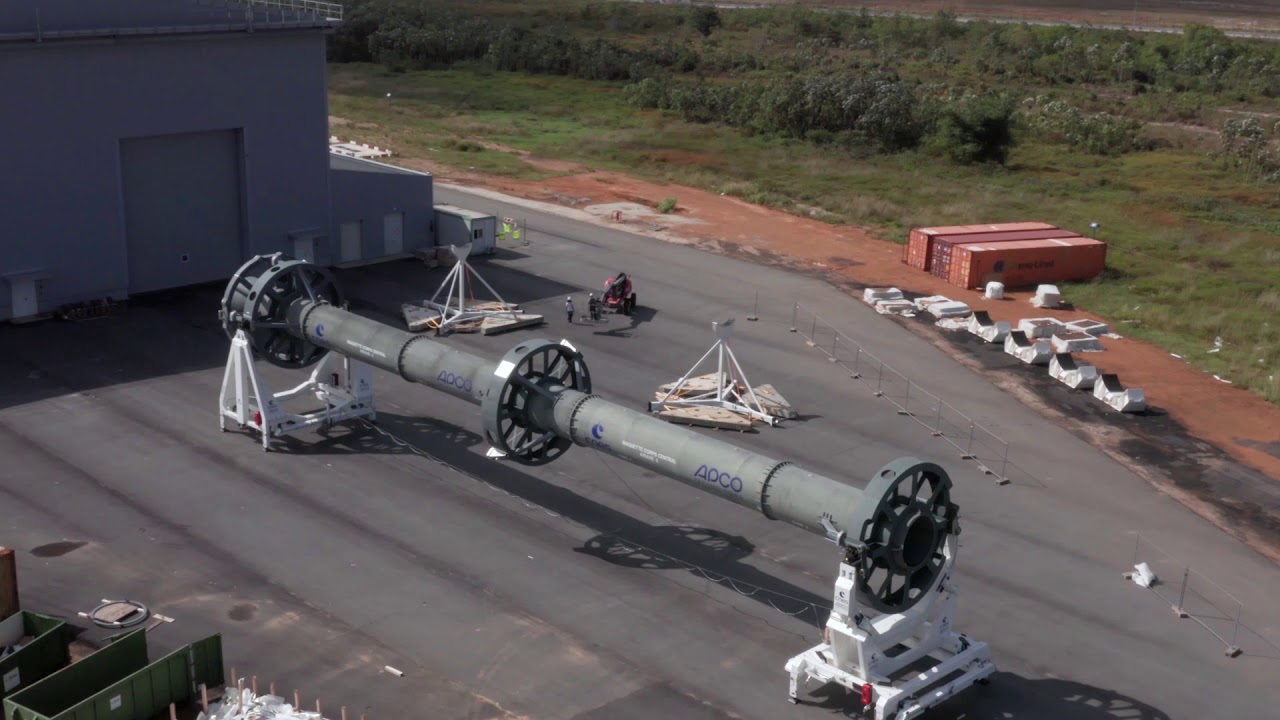
Si todo va según lo previsto el Ariane 6 hará su primer vuelo en 2020 –aunque veremos a qué altura del año– así que en el espacipouerto de Kourou siguen adelante a todo trapo con las obras de construcción de su...
Chasing the Moon por Robert Stone y Alan Andres. Ballantine Books, 2019. En 2019 he leído un montón de cosas acerca de la llegada de nuestra especie a la Luna con motivo de la celebración del 50 aniversario de ésta. Pero...
Christina Koch en la Cúpula de la EEI – NASA Con 288 días en el espacio Christina Koch se convierte a partir del 28 de diciembre de 2019 en la astronauta que más tiempo ha pasado en órbita de la historia hasta...

El último lanzamiento espacial de 2019 para China ha servido para comprobar que el cohete pesado Larga Marcha 5 parece estar listo para volver al servicio una vez corregido el problema con las turbobombas de la primera etapa que hizo fallar...

Foto del último lanzamiento espacial ruso de 2019 – Roscosmos Un cohete Rockot con una etapa superior Briz-KM ponía en órbita sin problemas en la madrugada del 27 de diciembre de 2019 tres satélites de comunicaciones de la serie Gonets-M y una...
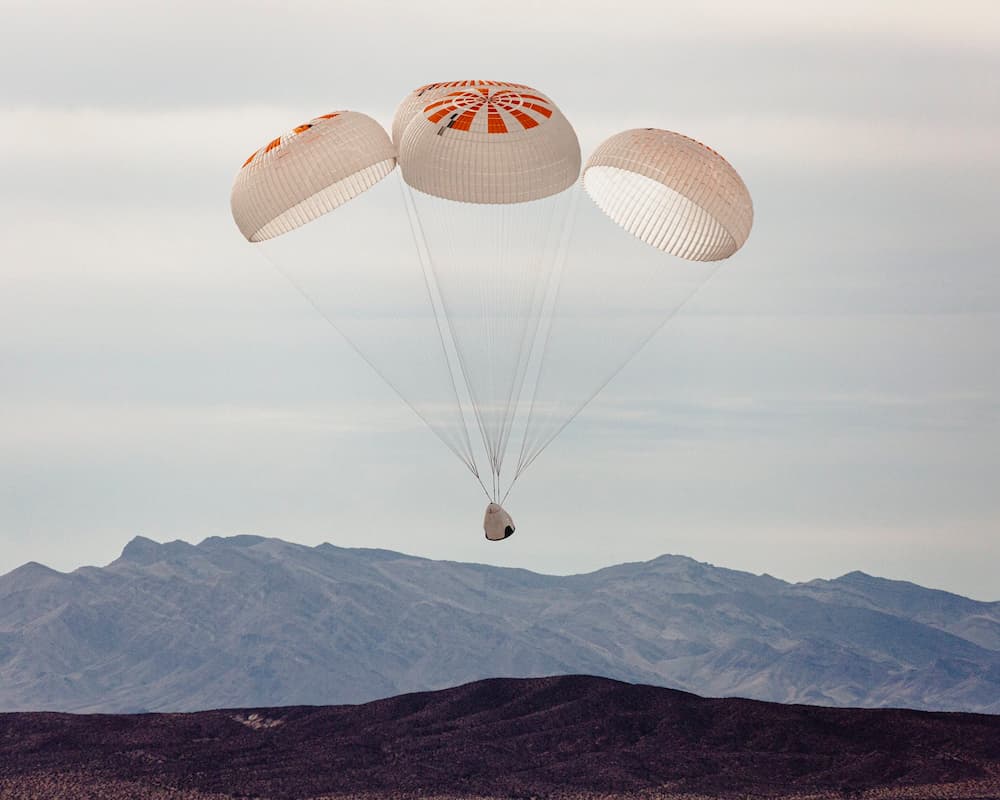
Décima prueba consecutiva con éxito de los paracaídas Mark 3 – SpaceX El pasado lunes 22 de diciembre de 2019 SpaceX conseguía dar otro paso adelante de cara a lanzar la primera misión tripulada de una cápsula Crew Dragon al conseguir superar...

Con un peso de 869 toneladas al lanzamiento el Larga Marcha 5, Changzheng 5 en chino, es el cohete más potente del programa espacial chino Tiene una capacidad de carga dos veces y media superior a la de cualquier otro de...

Primer aterrizaje de una Starliner que ha ido al espacio – NASA La primera cápsula Starliner lanzada al espacio aterrizaba en White Sands a las 13:58, hora peninsular española, del 22 de diciembre de 2019. Eso es unos seis días antes...
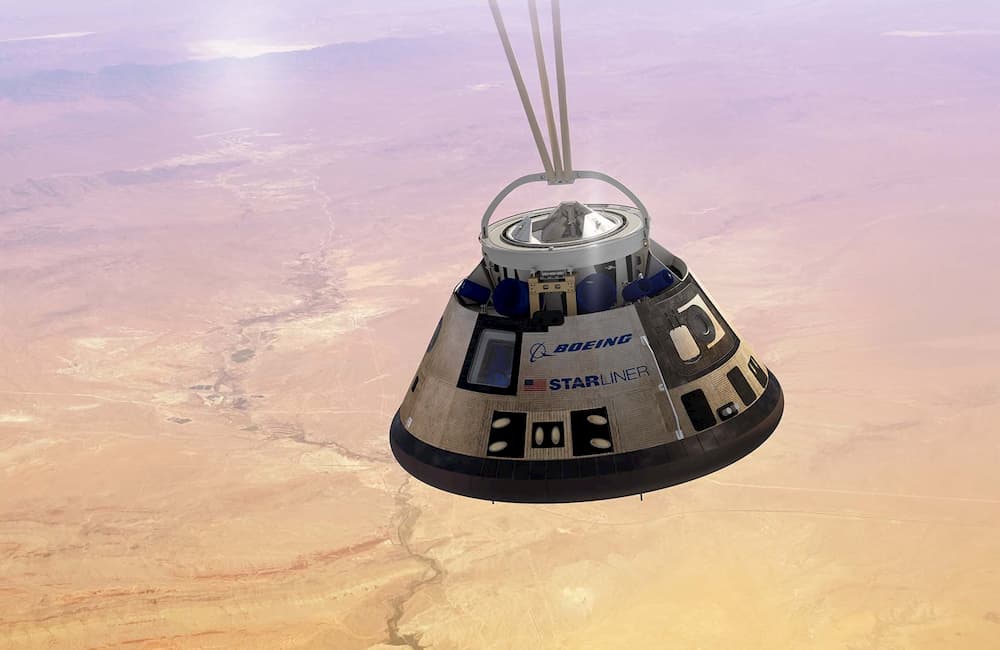
Impresión artística de una Starliner en órbita – Boeing El día después del susto con la primera Starliner que ha ido al espacio, Boeing y la NASA han actualizado la información sobre la misión. El primer dato es que la cápsula está...

Hace unos días el rover Mars 2020 de la NASA –que aún no tiene nombre– dio sus primeros pasos en la sala de ensamblado de naves espaciales del Laboratorio de Propulsión a Chorro. Aunque este rover es prácticamente un gemelo de...

Despegue de la Starliner OFT – NASA Tal y como estaba previsto, y tras una cuenta atrás sin ningún tipo de problema, a las 12:36 del 20 de diciembre de 2019 un cohete Atlas V con la primera cápsula Starliner de Boeing...
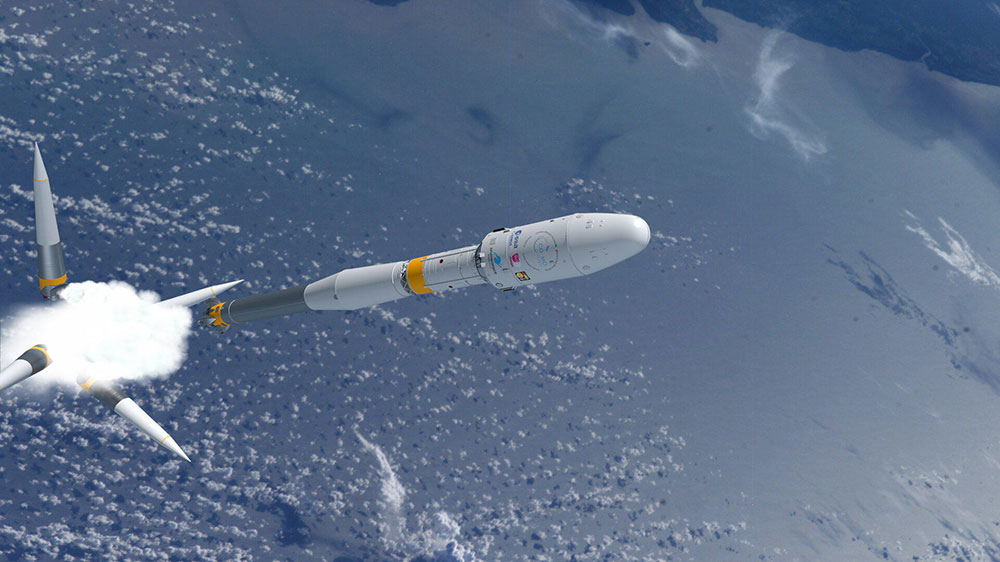
Impresión artística de la separación de Cheops de su lanzador - Arianespace Un cohete Soyuz con una etapa superior Fregat despegaba a las 9:54, hora peninsular española, del 17 de diciembre de 2019 para poner en órbita la misión Cheops (CHaracterising ExOPlanet...

En este estupendo vídeo de Asif Islam se puede observar el firmamento nocturno en diferentes lugares con diferentes niveles de contaminación lumínica. Está grabado en time-lapse y también a toda resolución (8K Ultra HD) aunque el efecto se puede apreciar igual...

Con un retraso de un día sobre las previsiones iniciales debido a la mala meteorología Blue Origin ha llevado a cabo el duodécimo lanzamiento de un cohete New Shepard. Era el sexto lanzamiento consecutivo de este cohete en particular, el RSS...
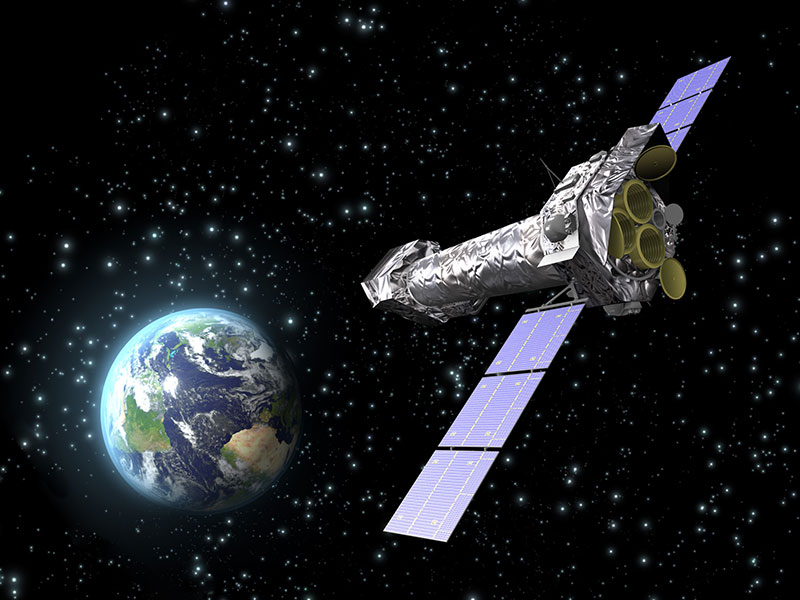
El 10 de diciembre de 1999 un cohete Ariane 5 ponía en órbita el observatorio espacial de rayos X bautizado como XMM-Newton. Inicialmente la misión tenía financiación para dos años de funcionamiento aunque se esperaba que el telescopio pudiera funcionar durante...

En este vídeo de Seeker Julian Huguet calcula en plan rápido la cantidad de emisiones contaminantes de CO₂ que suponen los lanzamientos de cohetes al espacio. El resultado es que no demasiado: unas 1.350 toneladas de CO₂ por lanzamiento. Para los...

Terminé de ver la segunda temporada de Marte, la serie de National Geographic (también en Netflix) que combina ficción del futuro cercano con entrevistas reales con grandes personajes del mundo de la ciencia. Al igual que la primera es una interesante...

La Dragon 19 durante su aproximación a la EEI - NASA Igual que fueron lanzadas en días consecutivos las cápsulas de carga Dragon 19 y Progress MS-13 han llegado a la Estación Espacial Internacional en días consecutivos. La primera fue capturada por...

La primera Starliner y su cohete en la plataforma de lanzamiento - Boeing Los equipos de tierra de Boeing, la NASA y United Launch Alliance llevaron a cabo sin problemas un simulacro de lanzamiento de la cápsula tripulada Starliner el pasado 6...

Despegue del Running Out Of Fingers - RocketLab El cohete Electrón bautizado como Running Out Of Fingers, Nos estamos quedando sin dedos, despegaba de la Zona de lanzamiento 1 en Nueva Zelanda el 6 de diciembre de 2019 para llevar a cabo...

Despegue de la Progress MS-13 - Roscosmos Menos de 24 horas después del lanzamiento de la cápsula de cargaDragon 19 por parte de SpaceX se producía el lanzamiento de otra cápsula de carga rumbo a la Estación Espacial Internacional. En este caso...
¡Arriba! - SpaceX La cápsula de carga Dragon 19 ya está en órbita rumbo a la Estación Espacial Internacional después de haber despegado del Complejo de Lanzamiento 40 del Centro Espacial Kennedy a las 18:29, hora peninsular española, del 5 de diciembre...

La cámara de pruebas - Airbus Rosalind Franklin, que es como se llama el rover de la misión ExorMars 2020, está pasando sus pruebas térmicas de vacío en una cámara especial diseñada para ello situada en las instalaciones de Airbus en Toulouse....

Este cortometraje visual de Eric Whitacre se titula Deep Field: The Impossible Magnitude of our Universe y está inspirado por la famosa imagen de campo ultra profundo del telescopio espacial Hubble. El montaje tiene mucho de ciencia y también de arte,...
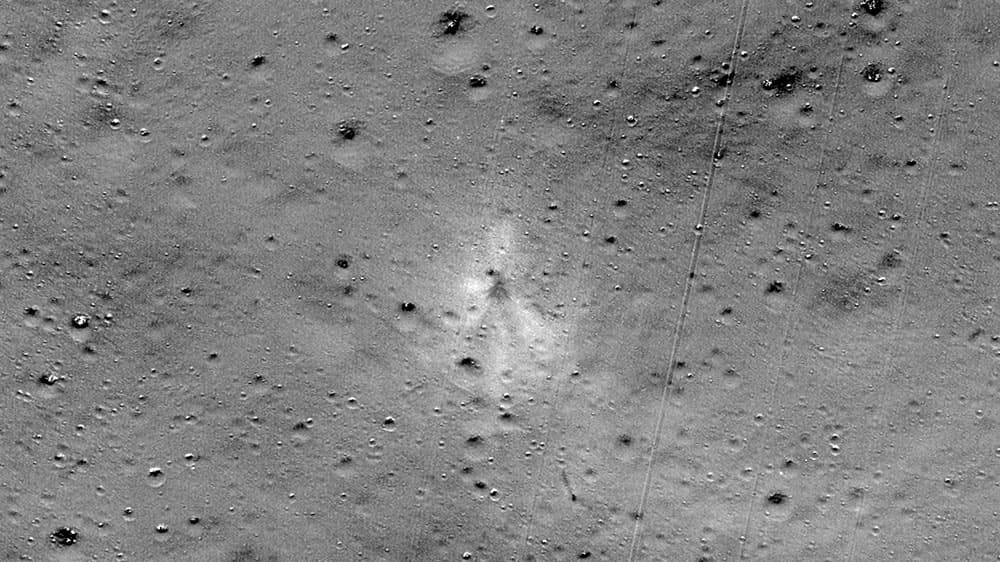
Cráter de impacto de Vikram - NASA/Goddard/Arizona State University Tras un aviso del espaciotrastornado Shanmuga Subramanian el equipo de la Lunar Reconnaissance Orbiter ha confirmado que en efecto se puede ver el impacto del aterrizador Vivkram de la Agencia India de Investigación...

Luca Parmitano con la nueva unidad de refrigeración / NASA Durante el tercer paseo espacial dedicado a la reparación del Espectrómetro Magnético Alfa (AMS) los astronautas Luca Parmitano y Andrew Morgan consiguieron instalar en su sitio la nueva unidad de refrigeración así...
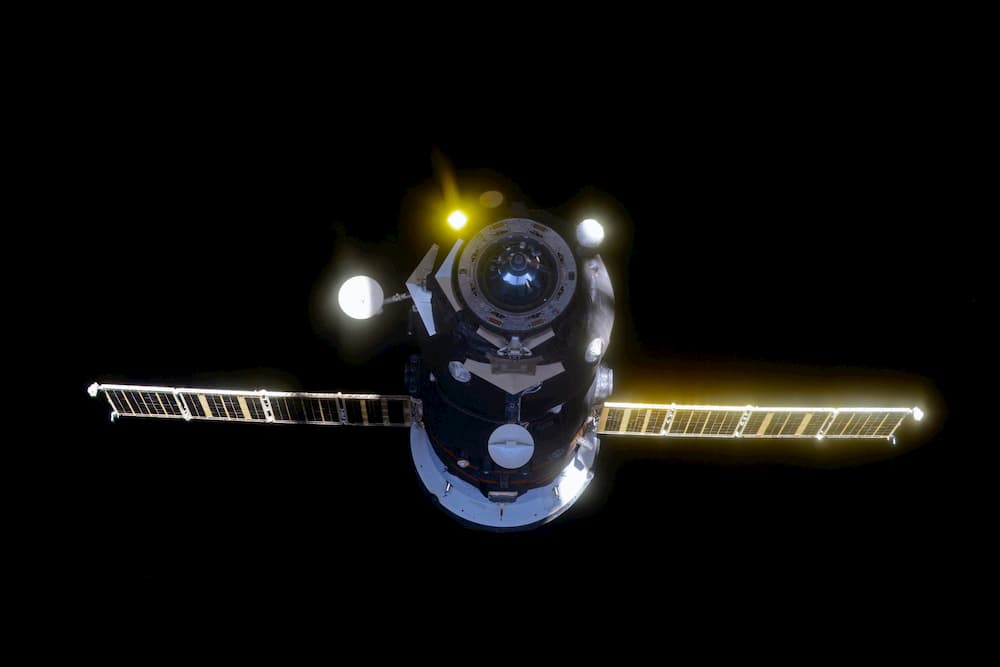
La Progress MS-12 a su partida de la EEI- Roscosmos Después de casi cuatro meses en la Estación Espacial Internacional la cápsula de carga Progress MS-12 terminaba su misión al desintegrarse en la atmósfera mediante una reentrada controlada el pasado 29 de...

El Ariane 5 ECA con número de serie 5109 que el 26 de noviembre de 2019 ponía en órbita de transferencia geoestacionaria (GTO) los satélites TIBA-1 e Inmarsat GX5 se convertía en el cohete número 250 de la familia Ariane en...

El destino ha querido que los hombres que fueron a la Luna a explorar en paz se queden en la Luna para descansar en paz. Estos valientes hombres, Neil Armstrong y Edwin Aldrin, saben que no hay esperanza para su rescate....

Cápsula y cohete a punto de ser acoplados - NASA/Cory Huston Desde hace unos días la primera Boeing CST-100 Starliner que irá –esperemos– al espacio está acoplada al cohete Atlas V que la lanzará desde el Complejo de Lanzamiento 41 de Cabo...
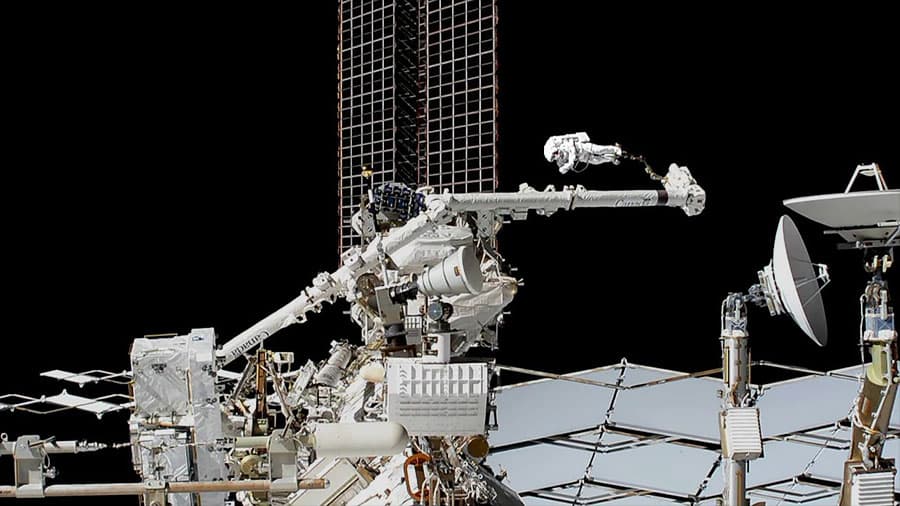
Luca Parmitano en el extremo del brazo robot de la EEI – NASA Luca Parmitano y Drew Morgan llevaron a cabo el viernes 22 de noviembre de 2019 el segundo de los cuatro paseos espaciales previstos para la instalación de un nuevo...

La Vía Láctea vista desde el Murchison Widefield Array, con las frecuencias más bajas en rojo, las frecuencias medias en verde y las más altas en azul. Foto: N. Hurley-Walker (ICRAR/Curtin) / Equipo GLEAM Bonita imagen captada por el Murchison Widefield Array,...

El vehículo de desarrollo Starship Mk1 que SpaceX estaba ensamblando en sus instalaciones de Boca Chica en Texas reventó durante una prueba de llenado a presión máxima del sistema de combustible. En el vídeo se puede ver cómo saltan por los...
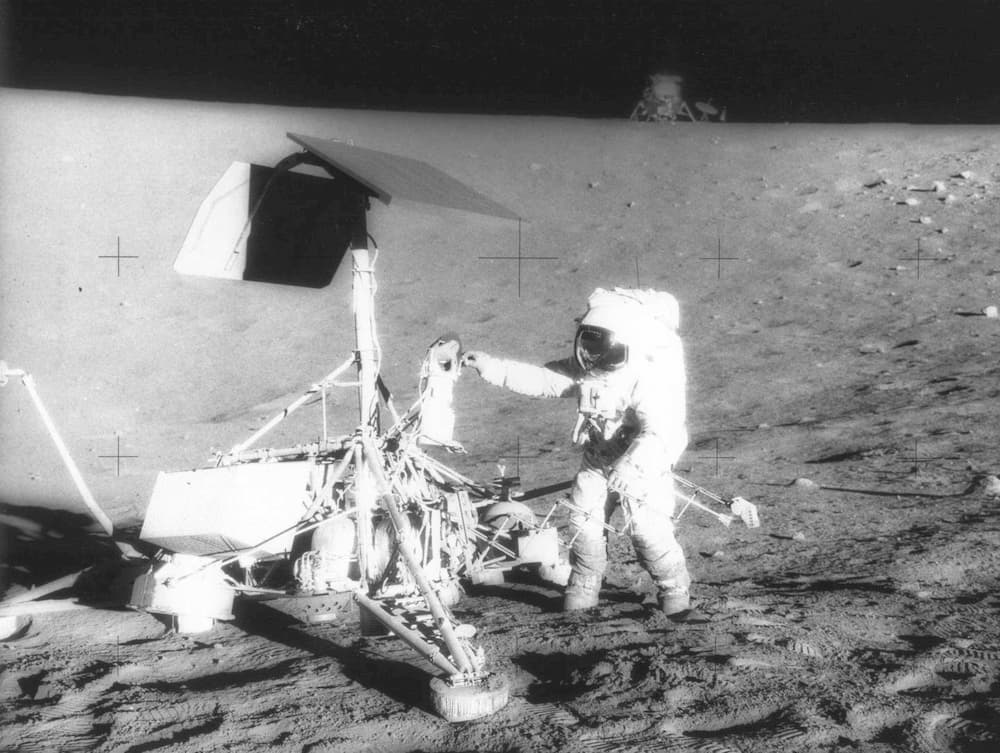
Charles Conrad Jr. al lado de la Surveyor 3 – NASA El 20 de abril de 1967 la sonda Surveyor 3 de la NASA aterrizó suavemente sobre la superficie de la Luna tras dar un par de botes. Desde allí transmitió 6.315...
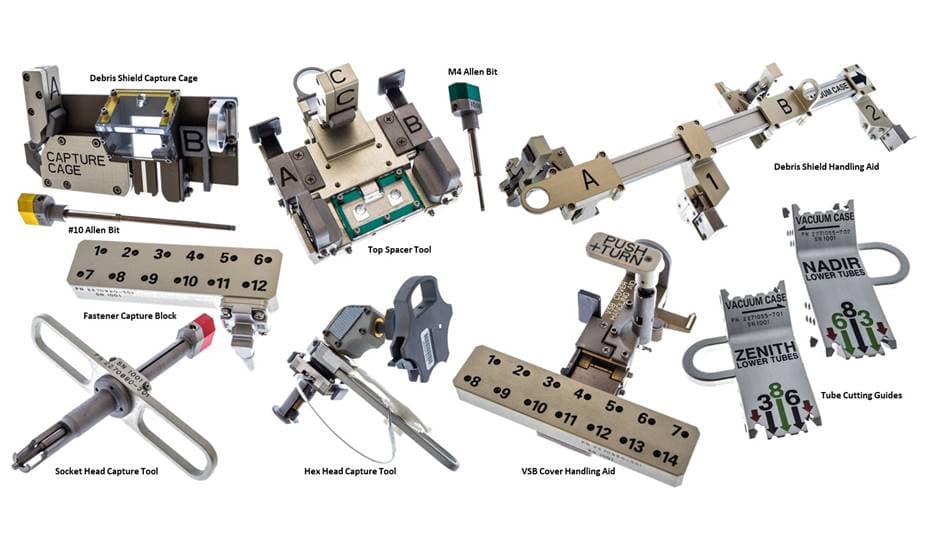
El AMS-02 en el exterior de la EEI – NASA El Espectrómetro Magnético Alfa es un detector de partículas desarrollado por 500 científicos de 56 instituciones de 16 países que está montado en el exterior de la Estación Espacial Internacional desde mayo...
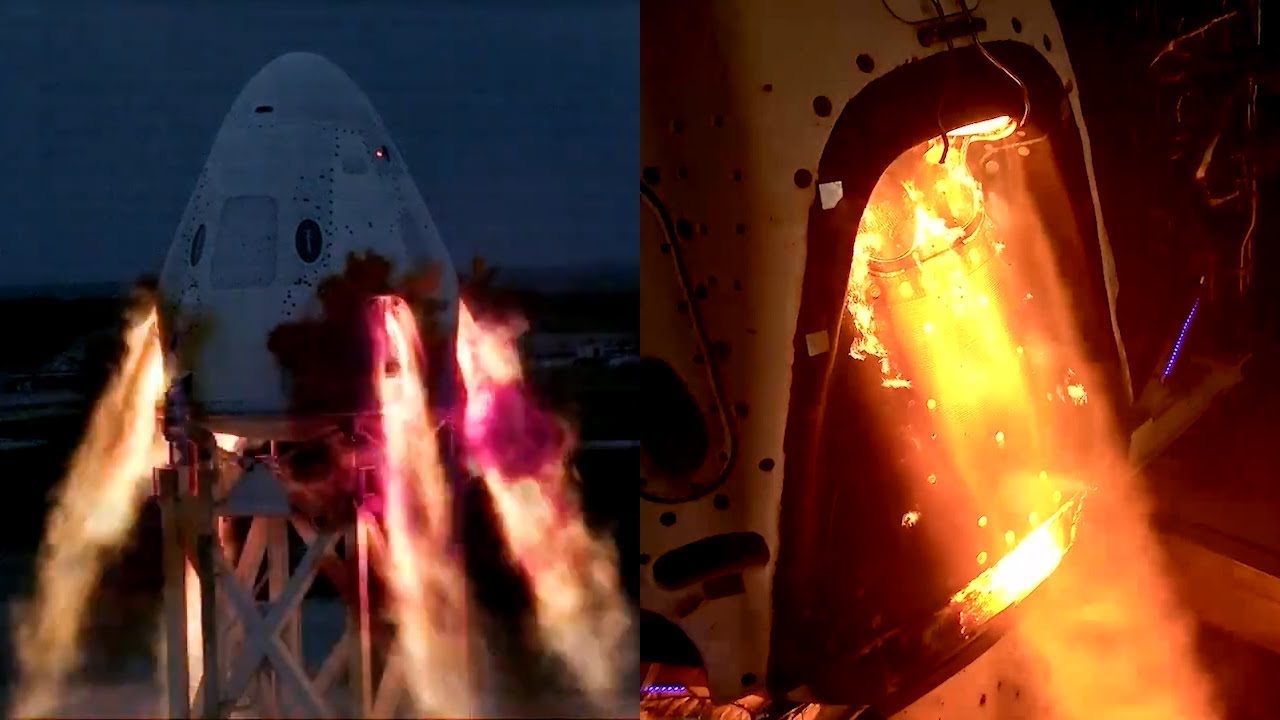
Tras un primer intento infructuoso en abril en el que la cápsula en pruebas resultó destruida SpaceX conseguía por fin que una Crew Dragon superara con éxito la prueba estática del sistema de escape. La prueba comenzó con dos encendidos de...
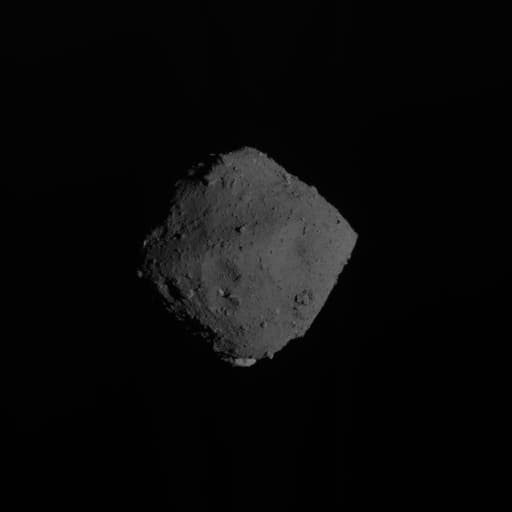
Esta de arriba es la última foto del asteroide Ryugu tomada por la cámara de navegación de la sonda Hayabusa 2 de la Agencia Japonesa de Exploración Aeroespacial antes de empezar el camino de regreso a la Tierra. En su cámara...

Cuando el 1 de enero de 2019 la sonda New Horizons de la NASA sobrevoló el objeto del Cinturón de Kuiper conocido oficialmente como 2014 MU69 la agencia llevaba ya un tiempo utilizando el apodo Ultima Thule para referirse a él...

Un Falcon 9 bloque 5 ha puesto en órbita el segundo lote de 60 satélites Starlink de SpaceX, lo que era su misión. Pero casi más interesante que eso era el hecho de que es una primera etapa que ya había...

Todo está listo en la Plataforma 40 de de Cabo Cañaveral para que SpaceX lance su segunda tanda de 60 satélites de la constelación Starlink para dar acceso a Internet en todo el mundo. Sería casi un lanzamiento rutinario más de...

La Cygnus 12 en la EEI – NASA Tras un lanzamiento sin problemas el pasado día 2 de noviembre la nave de carga Cygnus NG-12 «Alan Bean» está atracada en el módulo Unity de la Estación Espacial Internacional. Su misión forma parte...
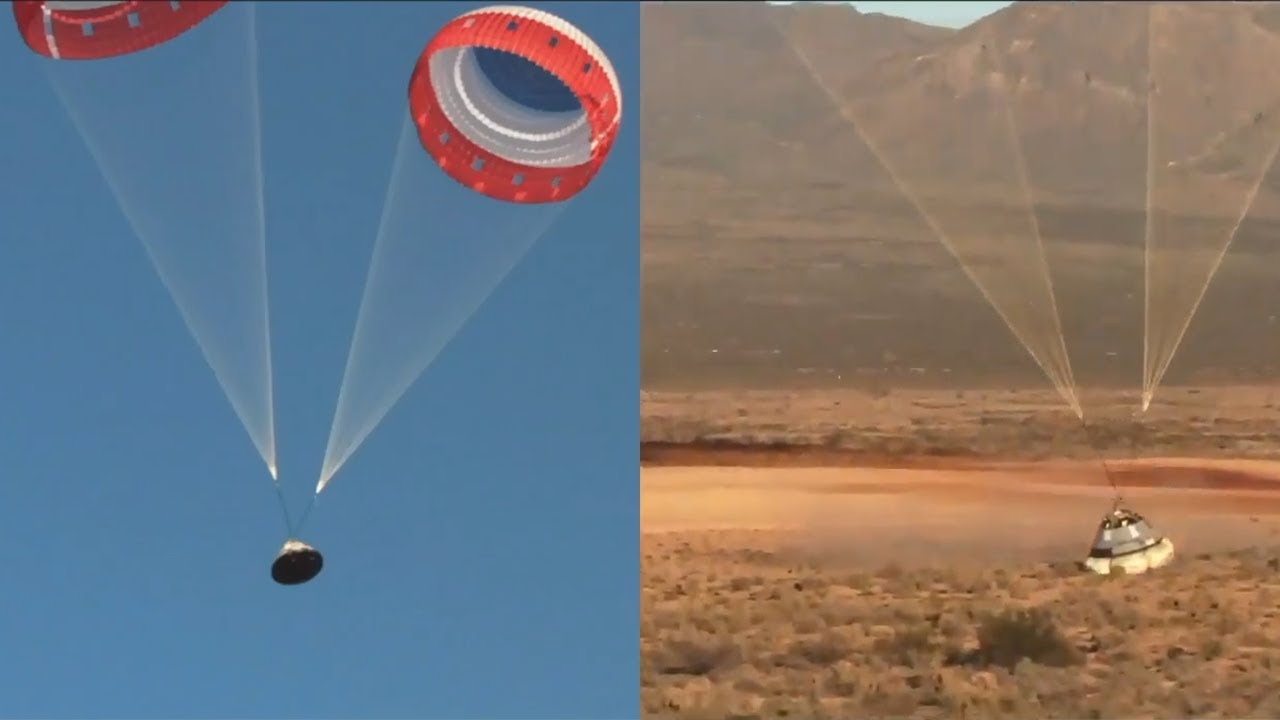
El 4 de noviembre de 2019, tal y como estaba previsto, Boeing llevó a cabo la prueba del sistema de escape de la Starliner, su futura cápsula espacial tripulada. Comprobar su funcionamiento es un paso imprescindible de cara a que la...

Mars continues to surprise us. While digging this weekend the mole backed about halfway out of the ground. Preliminary assessment points to unexpected soil properties as the main reason. Team looking at next steps. #SaveTheMole #Teamwork pic.twitter.com/UURvU8VTwZ— NASA InSight (@NASAInSight) October 27,...
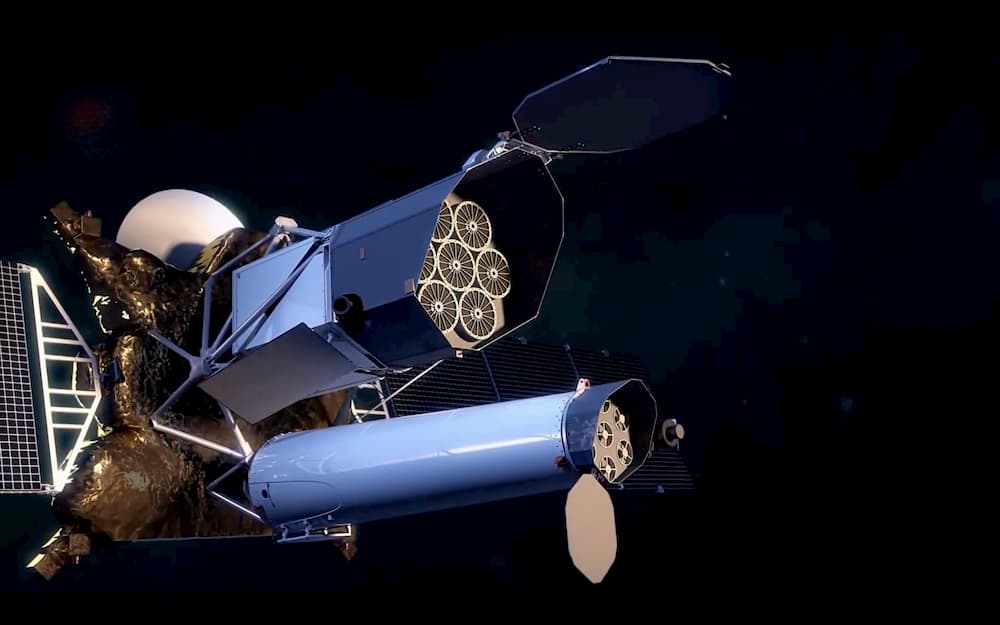
Impresión artística del Spektr-RG en el espacio Lanzado el pasado 13 de julio de 2019 el observatorio de rayos X ruso-alemán Spektr-RG acaba de alcanzar el punto de Lagrange L2 del sistema Tierra–Sol, que es desde dónde llevará a cabo su misión,...

Luis Peña ha propuesto un modelo del telescopio espacial Hubble en Lego Ideas, la web en la que aficionados de todo el mundo pueden sugerir construcciones para que el fabricante las saque al mercado como productos. Con unas 1.000 piezas está...

Photon rumbo a la Luna - RocketLab Hace unos meses Rocket Lab anunciaba Photon, su plataforma para el desarrollo de satélites artificiales. Pero durante el Congreso Internacional de Astronáutica acaba de anunciar que Photon, junto con una etapa extra para maniobras, también...

Mirando el primer #AllWomanSpacewalk de la historia - Amanda Wick El 18 de octubre de 2019 Christina Koch y Jessica Meir se convirtieron en las protagonistas del primer paseo espacial de la historia protagonizado por dos mujeres. Sólo habían tenido que pasar...
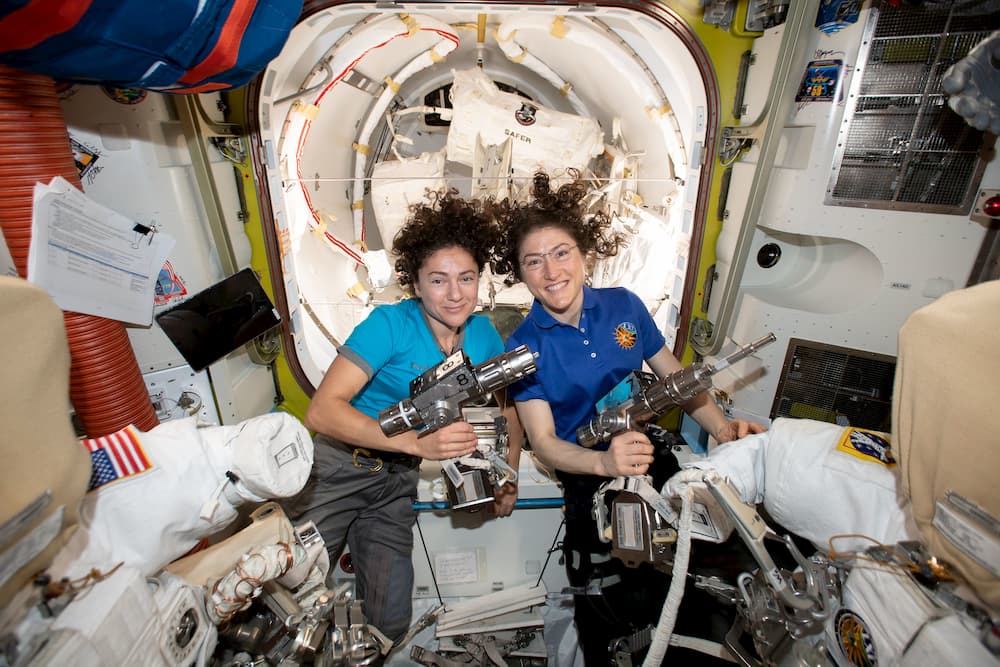
Jessica Meir (izda) y Christina Koch preparando las herramientas para su paseo espacial - NASA El pasado día seis de octubre de 2019 arrancaba una serie de paseos espaciales en la Estación Espacial Internacional que tenían como objetivo instalar y poner en...

En órbita - Rocket Lab El cohete Electrón de Rocket Lab bautizado como As the crow flies despegó en la madrugada del 17 de septiembre de 2019 para poner en órbita sin problemas el satélite Palisade de Astro Digital. En la foto...

Para que el rover Rosalind Franklin y la plataforma de aterrizaje Kazachok de la misión conjunta ExoMars 2020 de la Agencia Espacial Europea y Roscosmos lleguen de una sola pieza a la superficie de Marte tienen que funcionar correctamente muchas cosas....

Aunque en realidad es posible volar en el SpaceShipTwo en mangas de camisa Virgin Galactic, en colaboración con Under Armour, acaba de presentar el traje de vuelo que en el futuro usarán sus pasajeros. Es similar a los monos de vuelo...

With an assist from my robotic arm, the mole is digging again! We are just starting this new campaign, and are hopeful we can continue to dig. #Mars #Teamwork pic.twitter.com/Wkj7OhVG2y— NASA InSight (@NASAInSight) October 15, 2019 Después de seis meses sin moverse...
Impresión artística de un astronauta en la Luna con uno de los nuevos trajes xEMU - NASA Una de las muchas cosas que la NASA necesita para poder volver a poner una misión tripulada en la superficie de la Luna, ya sea...

Un cohete Electrón de Rocket Lab despegando - Rocket Lab Como empresa estadounidense que es Rocket Lab tiene que obtener un permiso de lanzamiento de la Autoridad Federal de Aviación de los Estados Unidos (FAA) sin importar desde dónde haga sus lanzamientos,...
Impresión artística del lanzamiento de una Starliner - Boeing/ULA No es la primera vez que lo hacen pero con las cápsulas ya casi terminadas de ensamblar las fechas que acaban de anunciar Boeing y la NASA para los lanzamientos de prueba de...
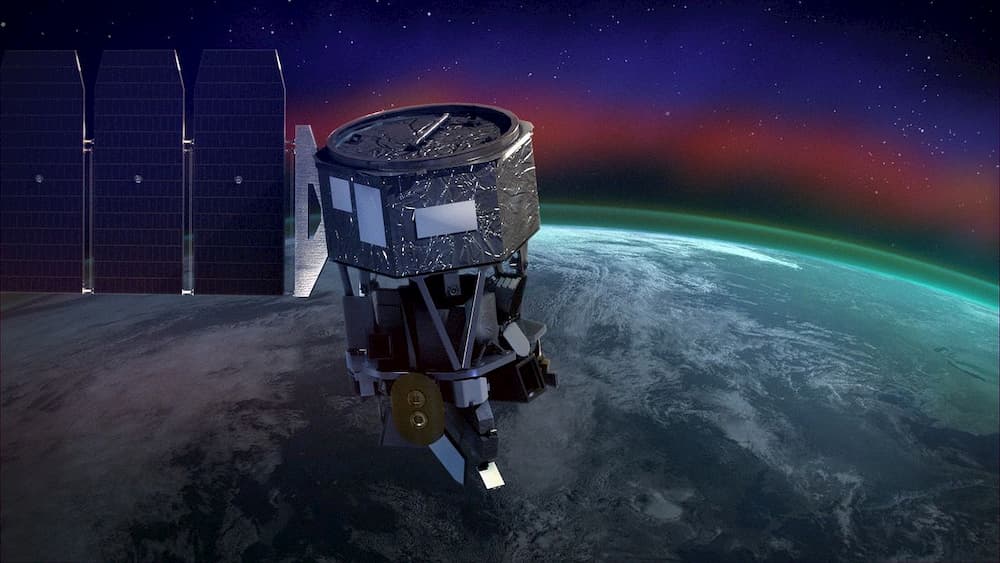
Después de más de dos años de retrasos la NASA por fin ha conseguido poner el órbita el satélite ICON el pasado 11 de octubre. Su nombre viene de Ionospheric Connection Explorer, Explorador de la Conexión Inonosférica; su misión es estudiar...
Alekséi Leónov, el último superviviente de los cosmonautas del programa Vosjod, acaba de morir a los 85 años. Con él se va una leyenda de la era espacial. El 18 de marzo de 1965 Leónov se convertía en la primera persona...

El HP3, de Heat Flow and Physical Properties Package, o Paquete de Flujo de Calor y Propiedades Físicas, también conocido como el topo, es uno de los dos instrumentos principales de la sonda InSight de la NASA. Estaba diseñado para introducirse...

Desde hoy, 6 de octubre de 2019, y hasta fin de mes, la NASA tiene programados ni más ni menos que cinco paseos espaciales. Servirán para poner en funcionamiento las seis baterías de iones de litio que ha llevado a la...

La Soyuz MS-12 segundos antes del aterrizaje - NASA/Bill Ingalls La cápsula tripulada Soyuz MS-12 aterrizaba sin problemas en Kazajistán a primera hora de la tarde del 3 de octubre de 2019 con Alexey Ovchinin de Roscosmos, Nick Hague de la NASA...

El pasado fin de semana, aprovechando la finalización del ensamblado del primer prototipo del Starship –aunque llamarlo prototipo me parece un poco demasiado optimista– Elon Musk presentó la que, si no llevo mal las cuentas, es como la cuarta versión del...

El HTV-8 ya acoplado a la Estación Espacial Internacional - NASA El carguero espacial HTV-8, bautizado como Kounotori-8 una vez que estuvo en órbita, fue capturado por el brazo robot de la Estación Espacial Internacional a las 13:12, hora peninsular española, del...
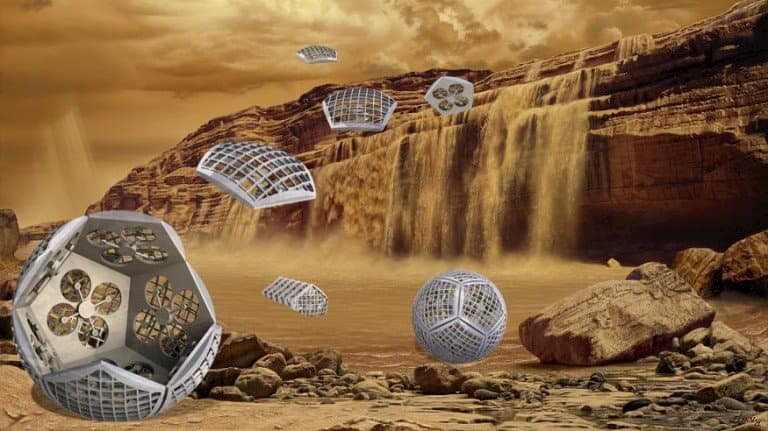
Aún le quedan años para ser lanzado al espacio –si es que alguna vez pasa de de la fase de idea potencialmente molona– pero la NASA acaba de presentar Shapeshifter, un diseño conceptual de un robot capaz de cambiar de forma...
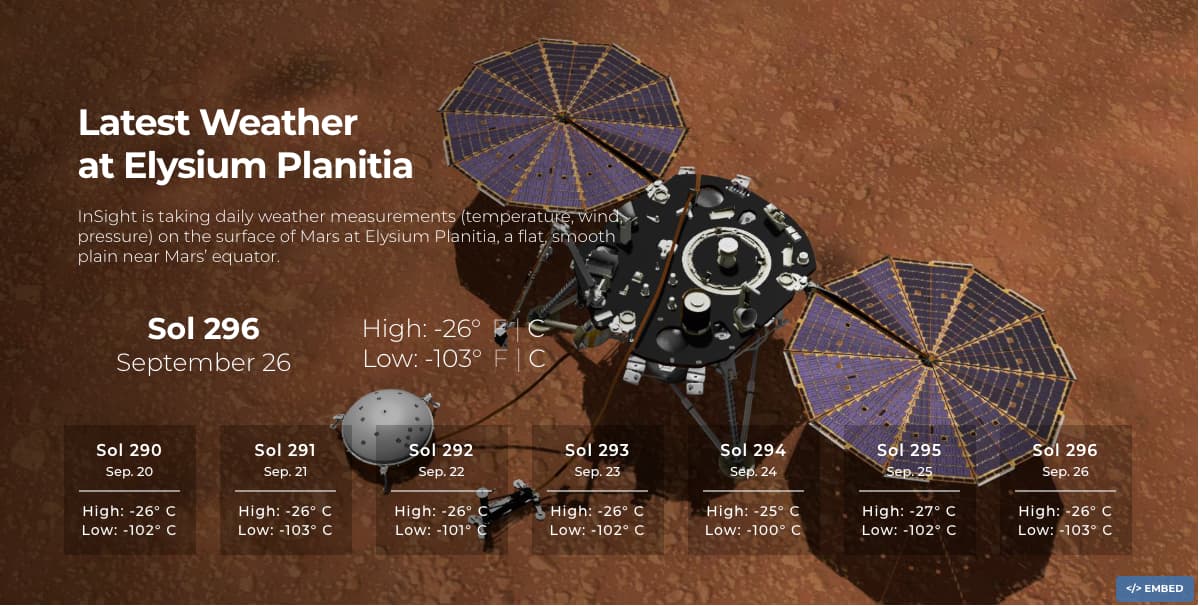
El verano ha llegado a la zona de Marte en la que está la sonda de la misión InSight de la NASA, que tiene esta página web que los aficionados a la meteorología no pueden dejar de visitar: Latest Weather at...

Despegue de la Soyuz MS-15 - NASA/Bill Ingalls Tras un lanzamiento y un vuelo sin problemas la cápsula tripulada Soyuz MS-15 atracaba en el puerto Zvezda de la Estación Espacial Internacional a las 21:42, hora peninsular española, del 25 de septiembre de...
El HTV-8 de nuevo en la plataforma de lanzamiento / MHI Launch Sertvices MHI Launch Services, la empresa responsable del lanzamiento del carguero espacial HTV-8, ha identificado la causa del incendio que obligó a cancelar el lanzamiento del pasado 10 de agosto...

El HTV-8 en la plataforma / Trevor Mahlmann Un incendio detectado en la plataforma de lanzamiento unas tres horas y media antes de la hora prevista de lanzamiento obligó a posponer el lanzamiento del carguero espacial japonés HTV-8 a última hora de...
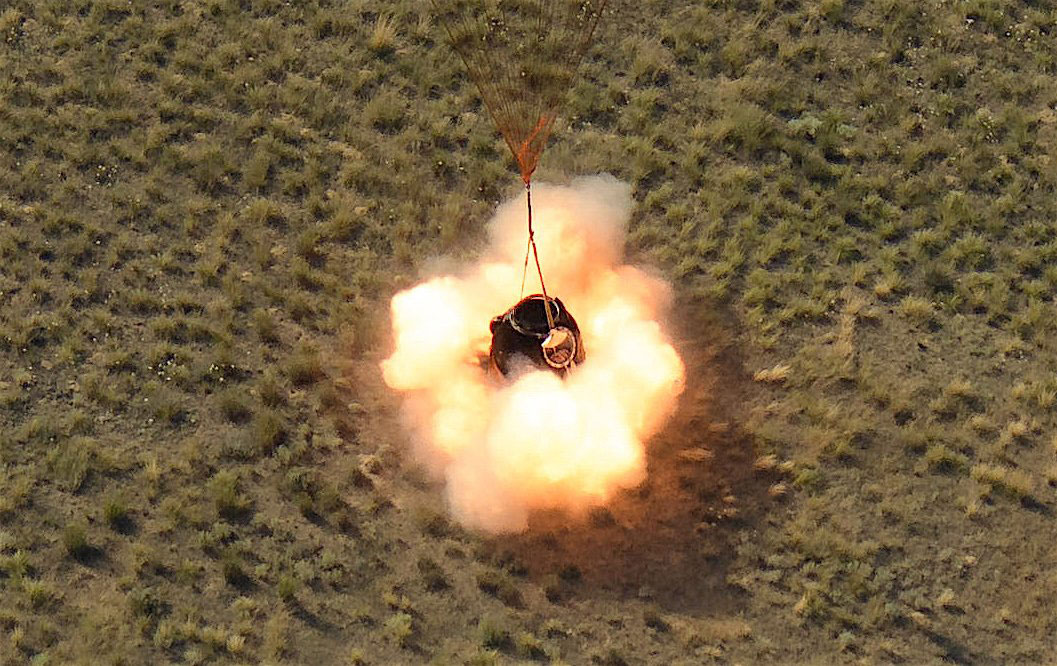
Aterrizaje de la Soyuz MS-11; Roscosmos ho ha publicado fotos del aterrizaje de la MS-14 – Roscosmos Un aterrizaje sin problemas a las 23:34 del 6 de septiembre de 2019 ponía fin a la misión de la cápsula tripulada Soyuz MS-14. Aunque...
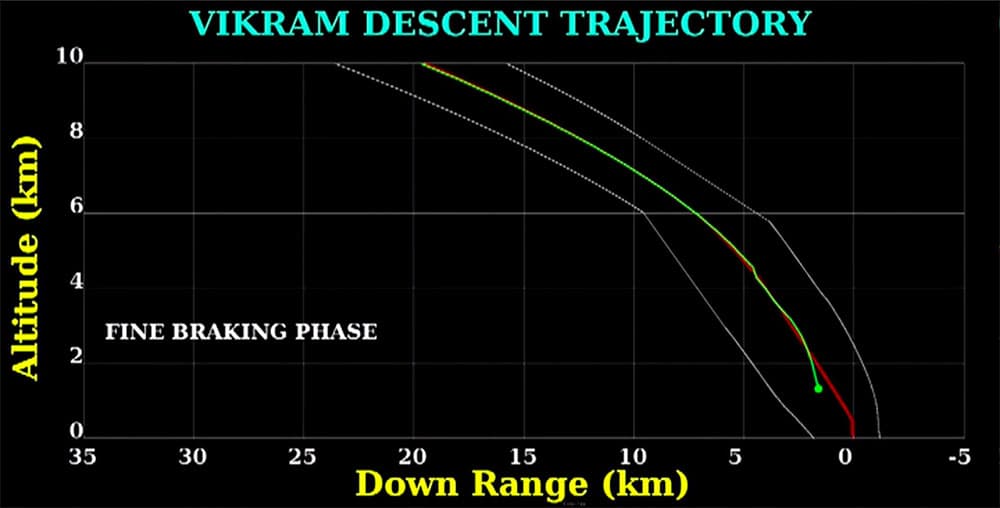
Momento en que la trayectoria real (verde) comenzó a separarse de la programada (rojo) - ISRO Todo iba bien con el descenso del aterrizador Vikram de la misión Chandrayaan 2 hasta que en un momento dado las pantallas del centro de control...

El póster - Alejandro Polanco Explorers from Earth es un proyecto de Alejandro Polanco –más conocido como @alpoma– que recoge en un póster de 92×60 centímetros los hitos más relevantes de la investigación espacial. Están descritos mediante una silueta, su nombre, años...

Separación del orbitador y del aterrizador - ISRO La misión india Chandrayaan-2 ha dado otro importante paso con la separación en órbita lunar del orbitador y del aterrizador. El orbitador, que no ha sido bautizado, estudiará la superficie de a Luna en...

SpaceEngine [Steam, Windows] es un simulador realista del Universo, así, a lo grande y tal como suena. A pesar de que el universo es grande ir de un sitio a otro en la simulación es rápido, porque se pueden modificar las...

Aunque a la cápsula Soyuz MS-14 aún le quedan un par de días antes de terminar su misión al robot Skybot F-850, también conocido como FEDOR, ya lo han vuelto a sentar en el asiento del comandante para volver a casa...

Scotty Manley grabó este estupendo vídeo con unas cuantas explicaciones acerca de la fotografía que publicó el presidente de los Estados Unidos en Twitter sobre un incidente en una instalación de lanzamiento de cohetes iraní (Semnan) con un cohete lanzador Safir...
Las dos partes del Telescopio Espacial James Webb ya ensambladas – NASA/Chris Gunn En otro importante paso adelante de cara a su lanzamiento las dos partes del Telescopio Espacial James Webb acaban de ser ensambladas en las instalaciones de Northrop Grumman en...

La Dragon 18 fotografiada sobre Canadá tras su partida – NASA/Christina Koch un amerizaje a unos 500 kilómetros al suroeste de Long Beach en California a las 00:21, hora peninsular española, del 28 de agosto de 2019 ponía fin a la misión...

Starhopper, la plataforma de pruebas de SpaceX para el desarrollo de su motor Raptor y del cohete Super Heavy y de la nave Starship, ha llevado a cabo con éxito su segundo vuelo. En esta ocasión se elevó unos 150 metros...
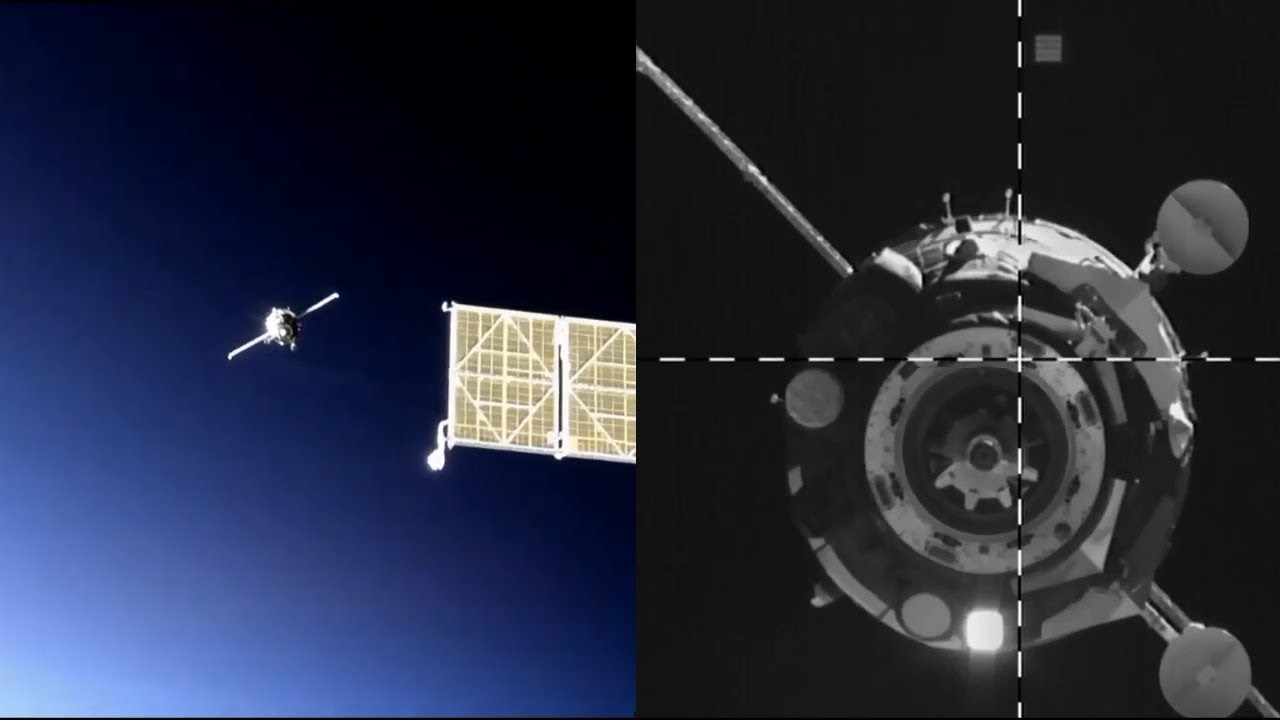
A la 5:12, hora peninsular española, del 27 de agosto de 2019 la cápsula Soyuz MS-14 atracaba de forma automática en el puerto trasero del módulo Zvezda de la Estación Espacial Internacional sin ningún tipo de problema. Esto confirmaba definitivamente el...
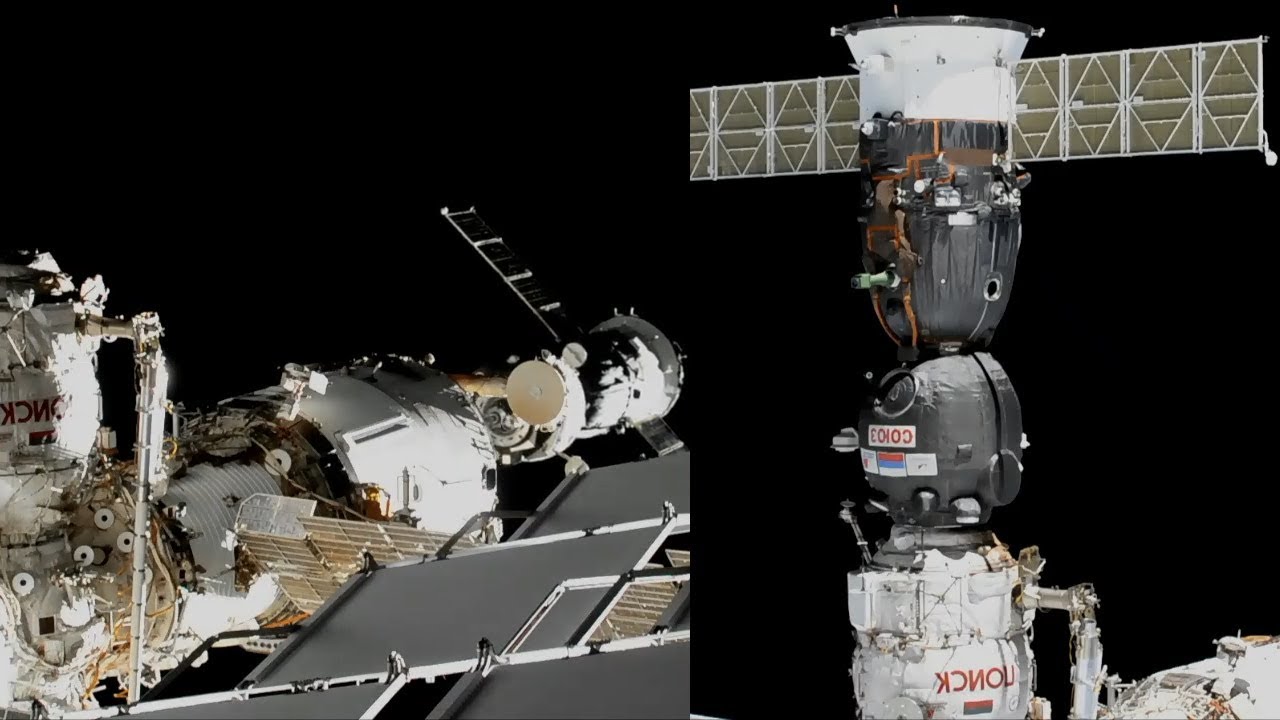
Aleksandr Skvortsov no tuvo ningún problema a la hora de mover la cápsula Soyuz MS-13 del puerto posterior del módulo Zvezda de la Estación Espacial Internacional al puerto superior del módulo Poisk aún cuando tuvo que hacer el atraque en modo...
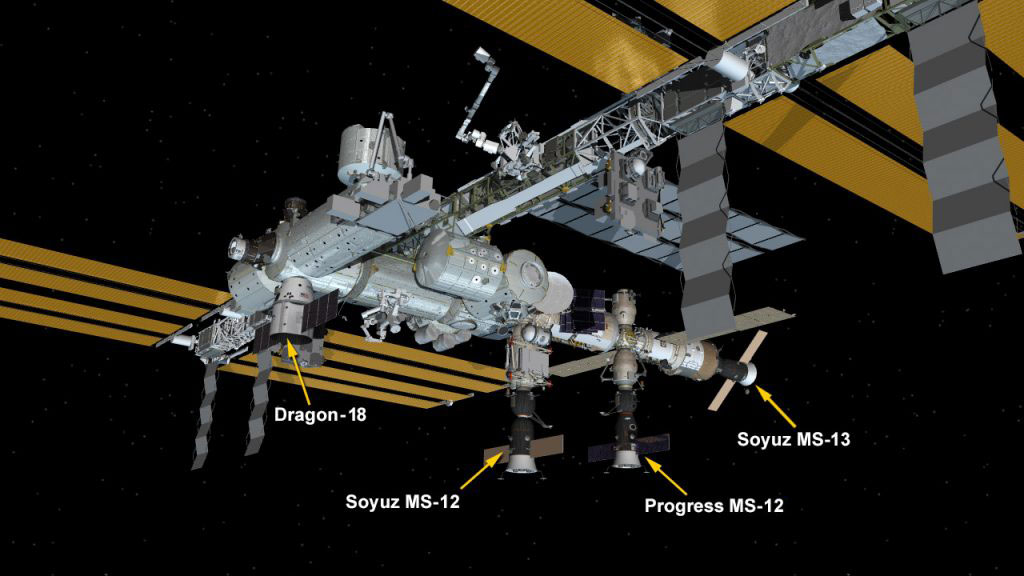
La Estación Espacial Internacional el 25 de agosto de 2019 - NASA Después de tener que abortar el atraque de la cápsula Soyuz MS-14 en la Estación Espacial Internacional los planes pasaban por intentar de nuevo el acoplamiento el lunes 26 de...

La Soyuz MS-14 cerca de la EEI - NASA A las 7:36, hora peninsular española, del 24 de agosto de 2019, Aleksey Ovchinin, el comandante de la Estación Espacial Internacional, pulsaba el gran botón rojo que iniciaba el comando de abortar la...

Tal y como estaba previsto a las 5:38, hora peninsular española, del 22 de agosto de 2019 un cohete Soyuz-2.1a despegaba del Sitio 31 del Cosmódromo de Baikonur para lanzar la cápsula tripulada Soyuz MS-14 rumbo a la Estación Espacial Internacional....
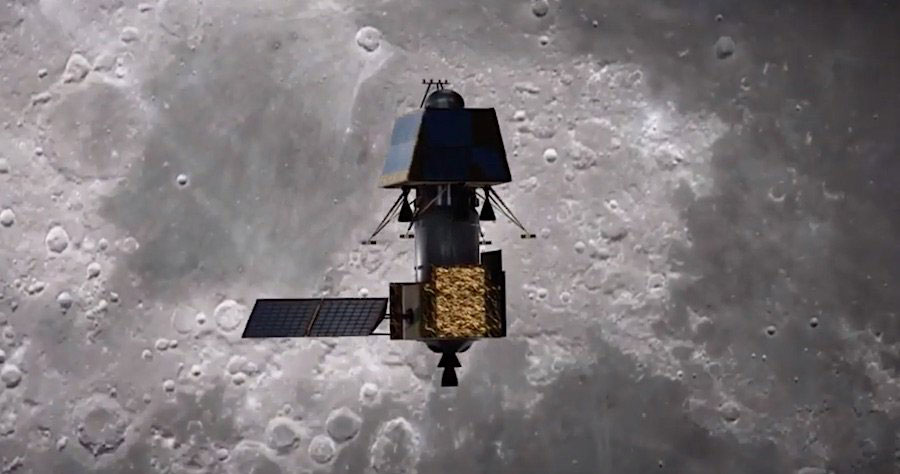
El orbitador de la misión Chandrayaan-2, al que está unido el arerrizador Pragyan, que lleva en su interior el rover Vikram, está desde el 20 de agosto de 2019 en una órbita de 114 km x 18.072 km. alrededor de la...
El cohete Electrón bautizado Look Ma, No Hands ha cumplido a la perfección con su misión a pesar de que su nombre recuerda mucho a aquel chiste de «mamá, mamá, sin manos…» y ha colocado en órbita los cuatro satélites que...

Virgin Galactic acaba de anunciar que ya tiene todo listo en el espaciopuerto de Mojave para llevar a cabo desde allí sus vuelos suborbitales. Esto quiere decir que tanto la terminal de pasajeros como el control de la misión y los...

El cohete durante las pruebas previas al lanzamiento - Rocket Lab Rocket Lab tiene todo listo para el lanzamiento de su octavo cohete Electrón. La primera oportunidad de lanzamiento se daba e una ventana que iba de las 15:29 a las 16:37,...

El pasado 11 de julio de 2019 la sonda Hayabusa 2 de la Agencia Japonesa de Exploración Aeroespacial (JAXA) llevaba a cabo la segunda toma de muestras de la superficie del asteroide Ryugu. En este caso esperan haber recogido muestras del...

Impresión artística de un Vector-R en la plataforma de lanzamiento – Vector Space Vector Space Systems acaba de anunciar que su fundador, que además ocupaba el cargo de director ejecutivo, ya no está en la empresa. También ha dicho que debido a...
Aunque la mayoría de los lanzamientos de SpaceX son con una única carga útil ha habido unos cuantos con varias como los varios de lotes de diez satélites Iridium NEXT, el de los 60 primeros satélites Starlink, o el de la...
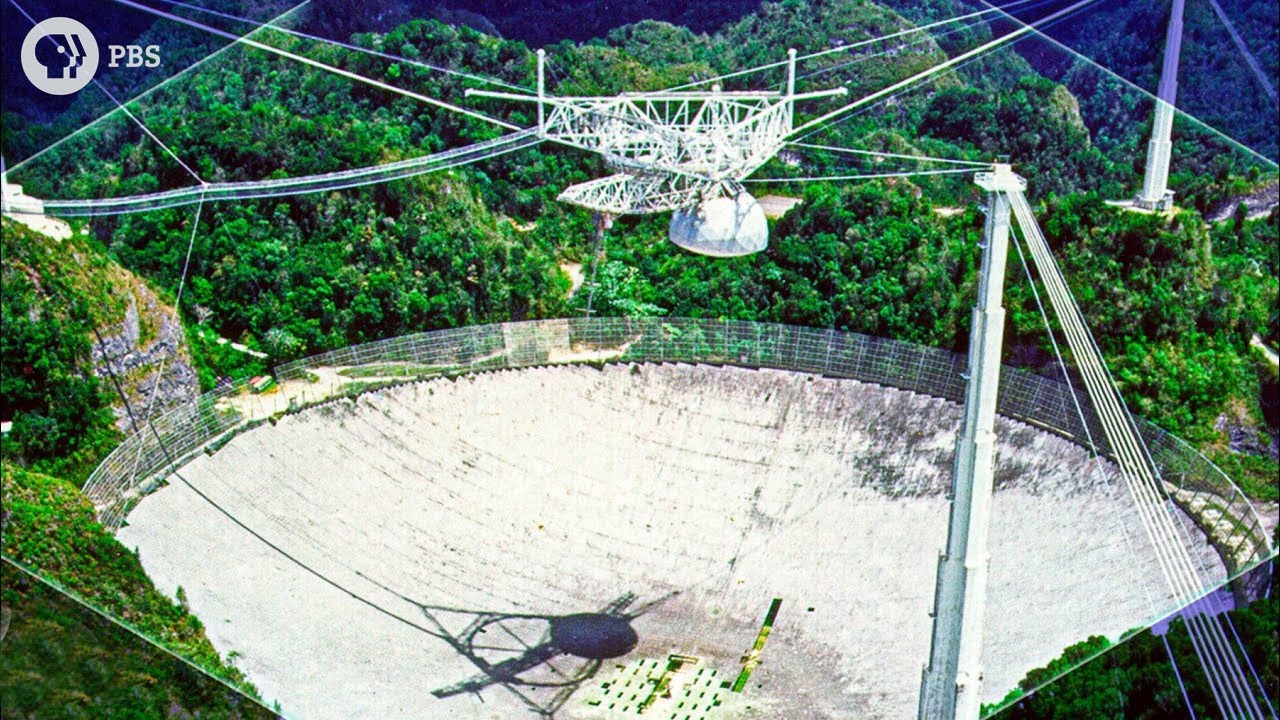
En este paseo virtual del canal PBS Space Time se puede ver cómo es el exterior y algunas de las instalaciones del radiotelescopio de Arecibo, que lleva ya algo más de 55 años en funcionamiento. Se ve un poco mejor y...

El 21 de julio de 2019 el Smithsoniano estrenó este montaje, diseñado para ser proyectado sobre una de las caras del monumento a Washington y unas cuantas pantallas adicionales más. Aunque hay varios vídeos por ahí que lo recogen "Apollo 50:...
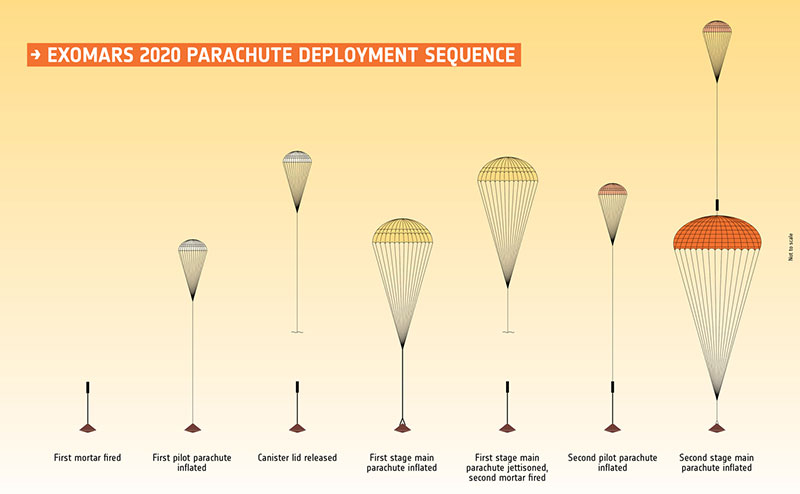
Secuencia de aterrizaje de la misión - ESA/Roscosmos No hay confirmación oficial pero dos fuentes distintas dicen que la segunda prueba de los paracaídas de la misión ExoMars 2020 de la Agencia Espacial Europea y Roscosmos ha terminado con el vehículo de...

Aunque es una idea que en principio habían descartado Rocket Lab acaba de anunciar que tiene planes para hacer recuperable y reutilizable la primera etapa de sus cohetes Electrón. Al principio las primeras etapas serán recuperadas del mar tras amerizar bajo...

Con unos días de retraso sobre la previsión inicial que se utilizaron para cambiar una válvula de comportamiento dudoso en la segunda etapa del cohete y con media hora extra de retraso sobre el inicio de la ventana de lanzamiento debido...

Con unas semanas de retraso sobre las previsiones iniciales Arianespace llevaba a cabo su séptimo lanzamiento del año a las 21:30, hora peninsular española, del 6 de agosto de 2019. El lanzamiento, llevado a cabo por un Ariane 5 ECA desde...
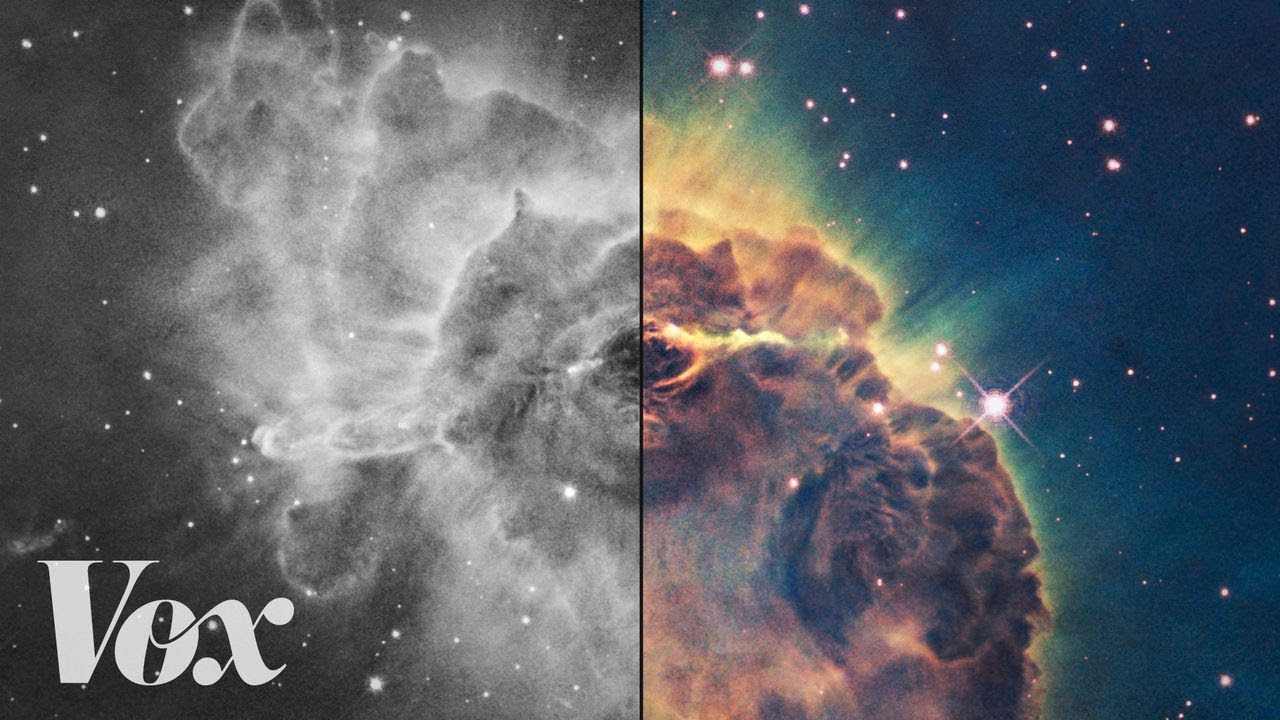
En este vídeo de Vox Media se puede ver cómo funciona el proceso de coloreado de las fotografías astronómicas. A diferencia del coloreado de fotografías en blanco y negro antiguas en este caso tiene un poco más de ciencia que de...
.jpg)
El cielo sobre los Himalayas (Nepal) (CC) Anton Yankovyi Esta magnífica foto de Anton Yankovyi que encontré en Wikimedia Commons muestra los efectos de la rotación de la tierra en una fotografía de larga exposición en la que el centro de los...

El diseñador Christian Stangl y el compositor Wolfgang Stangl han creado este vídeo que recoge en cosa de tres minutos la misión de Rosetta y Philae al cometa 67P Churyumov-Gerasimenko. Fue la primera misión de la historia en orbitar un cometa....
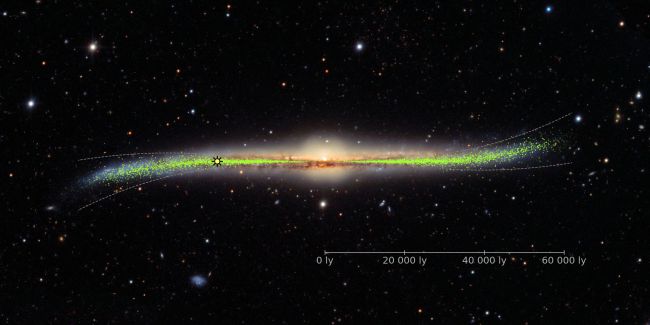
En un artículo en Science un equipo de astrónomos encabezado por Dorota Skowron explica cómo ha utilizado la luz de las cefeidas (estrellas variables) para realizar un mapa de nuestra Vía Láctea en 3-D, con el curioso resultado de que su...

Estos Planetary Blocks triunfaron en Kickstarter con cerca de 1.000 pedidos son una serie de bloques de madera decorados con planetas, planetas enanos y lunas, además del Sol. En total son 20 cuerpos celestes con datos acerca de sus tamaños, órbitas...

La cápsula de carga Progress MS-12, con unos 3.000 kilos de combustible, agua, oxígeno y provisiones y experimentos para la tripulación de la Estación Espacial Internacional, ya está lista en la Plataforma de lanzamiento número 31 del cosmódromo de Baikonur. El...

Partida de la Progress MS-11 – Roscosmos A las 12:43, hora peninsular española, del 29 de julio de 2019 la cápsula de carga Progress MS-11 recibió la orden de desatracar del compartimento Pirs de la Estación Espacial Internacional. Había llegado allí el...

En este vídeo del Ames Research Center de la NASA se explica qué es el Ión hidruro de helio (HeH+), una curiosa molécula que se conoce desde 1925 y que se suponía que debía existir en la naturaleza en el espacio...

La Dragon 128 llegando a la EEI – NASA/Nick Hague Tal y como estaba previsto el sábado 27 de julio de 2019 la cápsula de carga Dragon 18 fue capturada por Nick Hague y Christina Koch usando el brazo robot de la...

Drone cam pic.twitter.com/gVdMrMgUZq— e^ (@elonmusk) July 26, 2019 Tras semanas de espera por fin el Starhopper de SpaceX ha hecho su primer salto libre. En él ha alcanzado una altura de unos 20 o 30 metros, se ha desplazado en horizontal y...

Con un día de retraso sobre lo previsto inicialmente a causa de la mala meteorología reinante la cápsula de carga Dragon 18 despegaba sin problemas del Complejo de lanzamiento 40 de Cabo Cañaveral a las 00:01:56, hora peninsular española, del 26...
Pues a la tercera ha ido la vencida e iSpace se ha convertido en la primera empresa privada china en conseguir hacer un lanzamiento orbital. Los detalles acerca de la carga útil de su primer Hyperbola-1 no están muy claros pero...

Encontré una versión completa de la espectacular videoproyección del lanzamiento del Saturno V de la misión Apolo 11 con la que el Museo Nacional del Aire y del Espacio del Smithsonian conmemoró el 50º aniversario de la llegada del hombre a...

Hyperbola 1 durante su procesado previo al lanzamiento – iSpace Después de los intentos fallidos de LandSpace y OneSpace ahora es el turno de iSpace de intentar hacerse con el título de primera empresa privada china en hacer un lanzamiento orbital. El...

¡Amerizaje! El Apolo ha amerizado. Un mensaje de radio a las 18:50:18, hora peninsular española, del 24 de julio de 1969 procedente de uno de los Sea King que formaban parte del equipo de recogida indicaba que el módulo de comando...

La Impresión artística del módulo – Northrop Grumman Con la premura impuesta por la administración Trump para poner una misión tripulada sobre la Luna en 2024 la NASA ha decidido adjudicar de forma directa a Northrop Grumman la construcción del primer módulo...

En la plataforma – SpaceX Todo está listo en el Complejo de lanzamiento 40 de Cabo Cañaveral para el lanzamiento de la cápsula de carga Dragon 18 rumbo a la Estación Espacial Internacional. Bueno, todo salvo la meteorología, que se calcula favorable...
Empezando con Le Voyage dans la Lune (1902) muchas han sido las veces que el cine de Hollywood ha llevado a los seres humanos a visitar nuestro satélite natural, como repasa este vídeo de la Royal Ocean Film Society. Cubre desde...
Para conmemorar la llegada a la Luna Martin Krzywinski ha preparado estos interesantes «mapas espaciales» en blanco y negro. Tienen 1 bit de «profundidad» pero muchos gigapíxeles de tamaño, por lo que se incluyen dentro de una herramienta de visualización con...
Chris Kraft en el centro de control de las misiones Mercury A los 95 años de edad y justo durante las celebraciones del 50 aniversario de la llegada de la humanidad a la Luna ha muerto Christopher C. Kraft Jr. Más conocido...

Aunque en un principio parecía que iban a perder la ventana de lanzamiento de julio de 2019 de la misión Chandrayaan 2 al haber detectado un problema en la segunda etapa del cohete GSLV Mk.3 que tiene que ponerla en órbita...

Tras un lanzamiento perfecto y tal y como estaba previsto la cápsula tripulada Soyuz MS-13 atracaba en el módulo Zvezda de la Estación Espacial Internacional a las 00:50, hora peninsular española, del 21 de julio de 2019. Tras comprobar la estanqueidad...
Es un pequeño paso para un hombre, un gran salto para la humanidad A las 4:56:15, hora peninsular española, del 21 de julio de 1969 –20 de julio todavía en los Estados Unidos, lo que a veces da lugar a confusiones–...
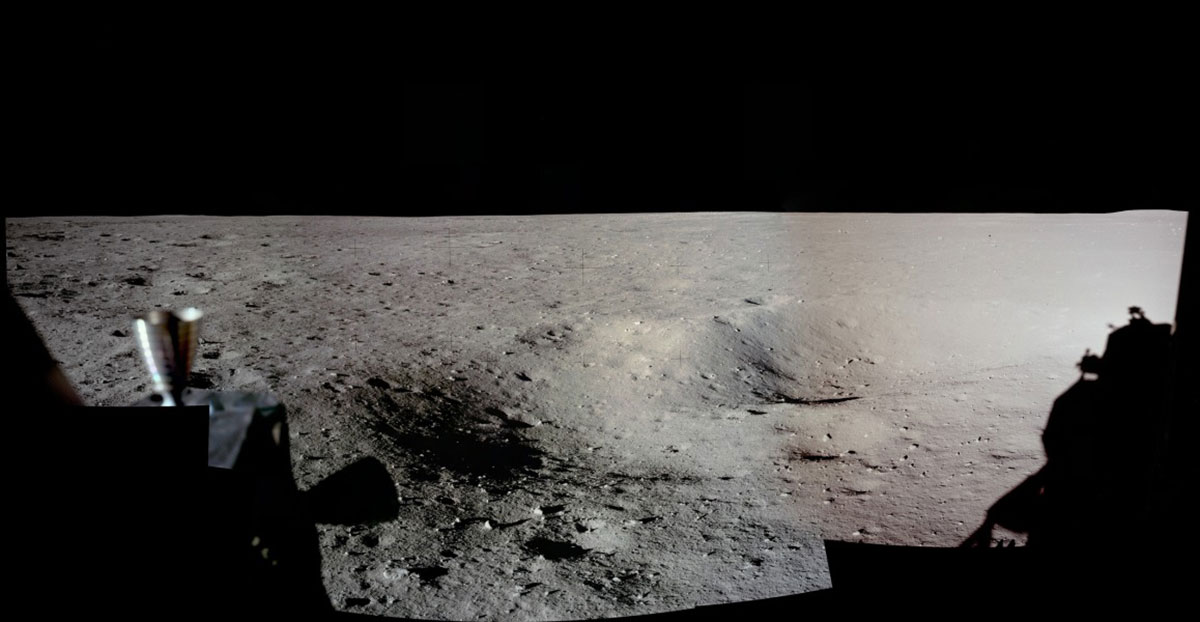
Houston… Aquí Base Tranquilidad. El Águila ha aterrizado. A las 22:17:40, hora peninsular española, del 20 de julio de 1969, y con apenas 17 segundos de combustible en sus depósitos el módulo lunar del Apolo 11 se posaba sobre la superficie...

Tal y como estaba programado a las 18:28:21, hora peninsular española, del 20 de julio de 2019 la cápsula tripulada Soyuz MS-13 despegaba rumbo a la Estación Espacial Internacional. A bordo van Aleksandr Skvortsov de Roscosmos, Luca Parmitano de la Agencia...

Apollo 11 de Todd Miller es una de esas películas que cumplen más que de sobra con las expectativas creadas por el trailer. Cuenta la historia del Apolo 11 desde que el Saturno V es llevado a la plataforma de lanzamiento...

Después de casi tres meses analizando datos, imágenes y los restos de la cápsula SpaceX tiene claro qué fue lo que causó la explosión que destrozó la primera Crew Dragon en ir al espacio durante unas pruebas en tierra. Al parecer una...

La cápsula tripulada Soyuz MS-13 y el cohete Soyuz-FG que la va a poner en órbita ya están en la Plataforma de lanzamiento número 1 del Cosmódromo de Baikonur en espera de su lanzamiento rumbo a la Estación Espacial Internacional. Está...
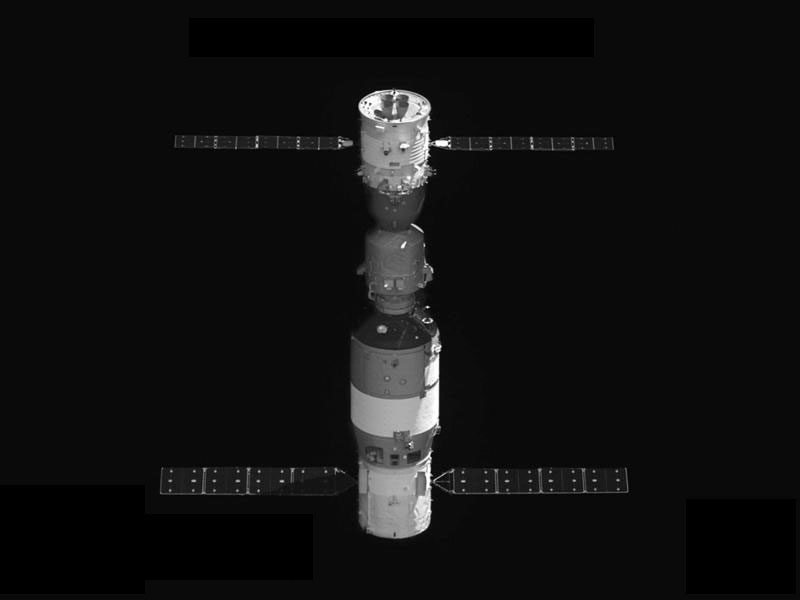
La nave tripulada Shenzhou 11 (arriba) y el Tiangong 2 vistos por el Banxing–2 - Academia China de las Ciencias Según han informado las autoridades chinas el laboratorio espacial Tiangong 2 terminará su misión con una reentrada controlada en la atmósfera el...

En este vídeo divulgativo del Lawrence Livermore National Laboratory un grupo de científicas explica cómo andamos en cuestión de Defensa Planetaria –sí, se llama realmente así– frente al impacto de un asteroide en algún momento futuro. El panorama no es muy...

Lanzamiento. Tenemos un lanzamiento 32 minutos después de la hora. Lanzamiento del Apolo 11. Sin duda no es tan famosa como la que dijo Neil Armstrong al pisar la Luna. Pero esta frase de Jack King, uno de los responsables de...

Hitchcock odiaba trabajar con niños («y con animales y con Charles Laughton», añadió) porque eran bastante impredecibles y difíciles de controlar para lograr el resultado deseado para sus películas. Sin embargo las niñas de Space Girls (dirigidas por Carys Watford) lo...
Un problema sin especificar, al parecer en la segunda etapa del cohete que tenía que ponerla en órbita, hizo que el lanzamiento de la misión Chandrayaan-2 se pospusiera cuando sólo quedaban 56 minutos para que se produjera. Solucionarlo va a implicar...
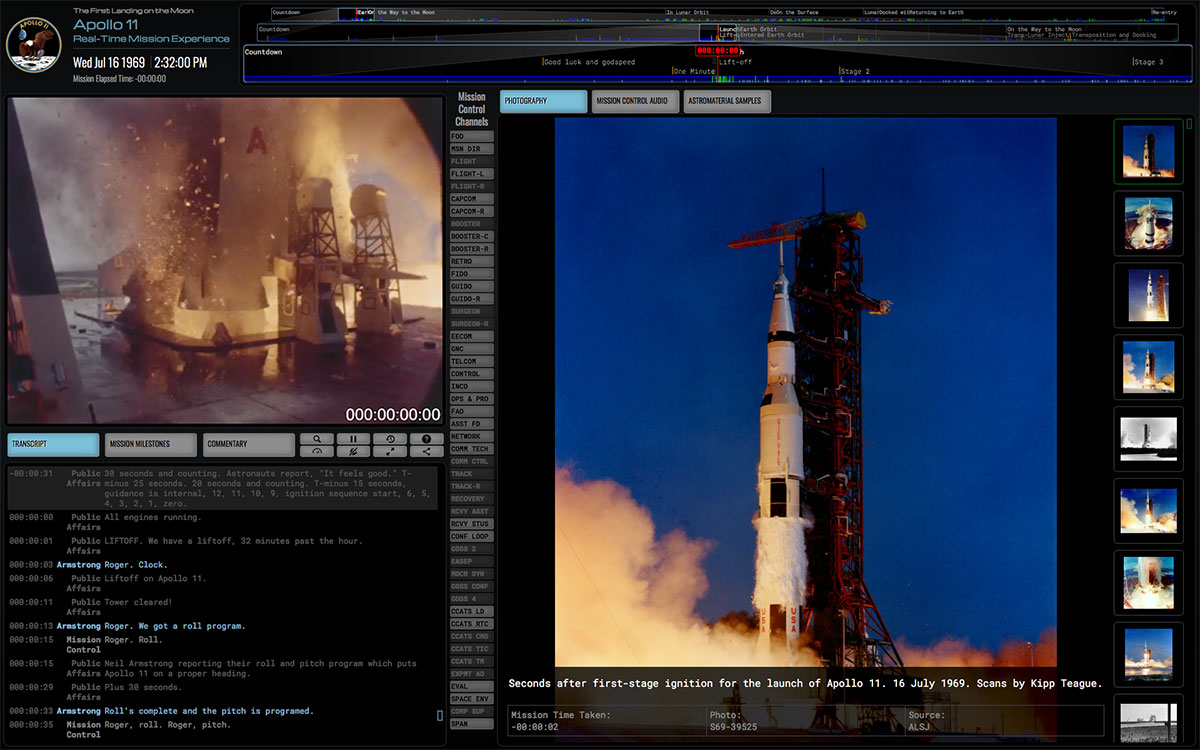
A las 14:32, hora peninsular española, del 16 de julio de 1969* el Saturno V AS-506 despegaba del Complejo de lanzamiento 39A del Centro Espacial Kennedy para dar comienzo a la misión del Apolo 11. A bordo iban los primeros seres...

La cuenta atrás está en marcha en el Centro Espacial Satish Dhawan en la costa este de la India para que un cohete GSLV Mk.3 lance la misión Chandrayaan-2 rumbo a la Luna. Es la segunda misión india que tiene como...
La simpática gente de Flipboku nos envió una copia de su proyecto Apollo 11 - An Epic Moon Landing Flip Book Edition. Son dos pequeños flipbooks, libritos de esos en los que pasas las páginas para ver una animación o película,...

Un cohete Protón-M está listo en el Complejo de lanzamiento 81 del Cosmódromo de Baikonur para poner el órbita el observatorio ruso-alemán de rayos X Spektr-RG. El lanzamiento está programado para las 14:30:57, hora peninsular española y se podrá seguir a...

La superficie de Ryugu y el tubo de toma de muestras de Hayabusa 2 cuatro segundos después del contacto – JAXA El equipo de la sonda Hayabusa 2 de la Agencia Japonesa de Exploración Aeroespacial (JAXA) se ha apuntado otro éxito hoy...
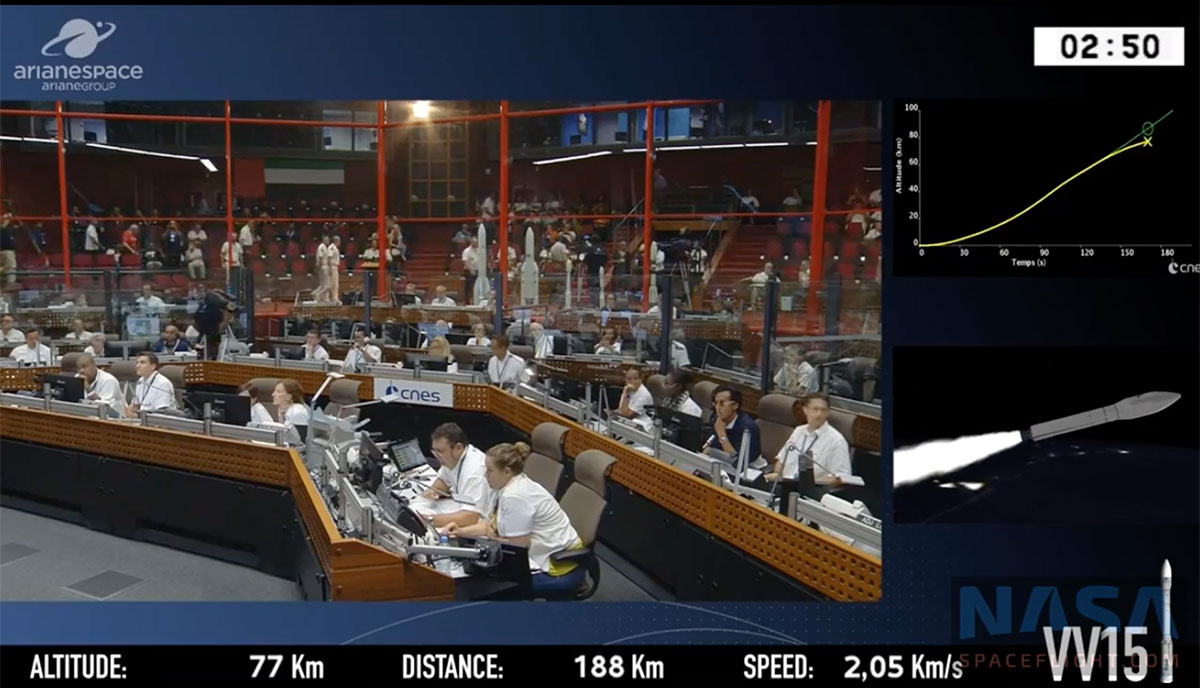
Tras varios días de aplazamientos debido a malas condiciones meteorológicas el decimoquinto cohete Vega de la Agencia Espacial Europea despegaba a las 3:53:03, hora peninsular española, del 11 de julio de 2019 para poner en órbita el satélite militar Falcon Eye...

Release, release, release – Virgin Orbit El 10 de julio del 2019 Virgin Orbit daba un importantísimo paso adelante en su programa de pruebas con la suelta del primer cohete LauncherOne desde el Boeing 747 Cosmic Girl. En realidad no se trataba...
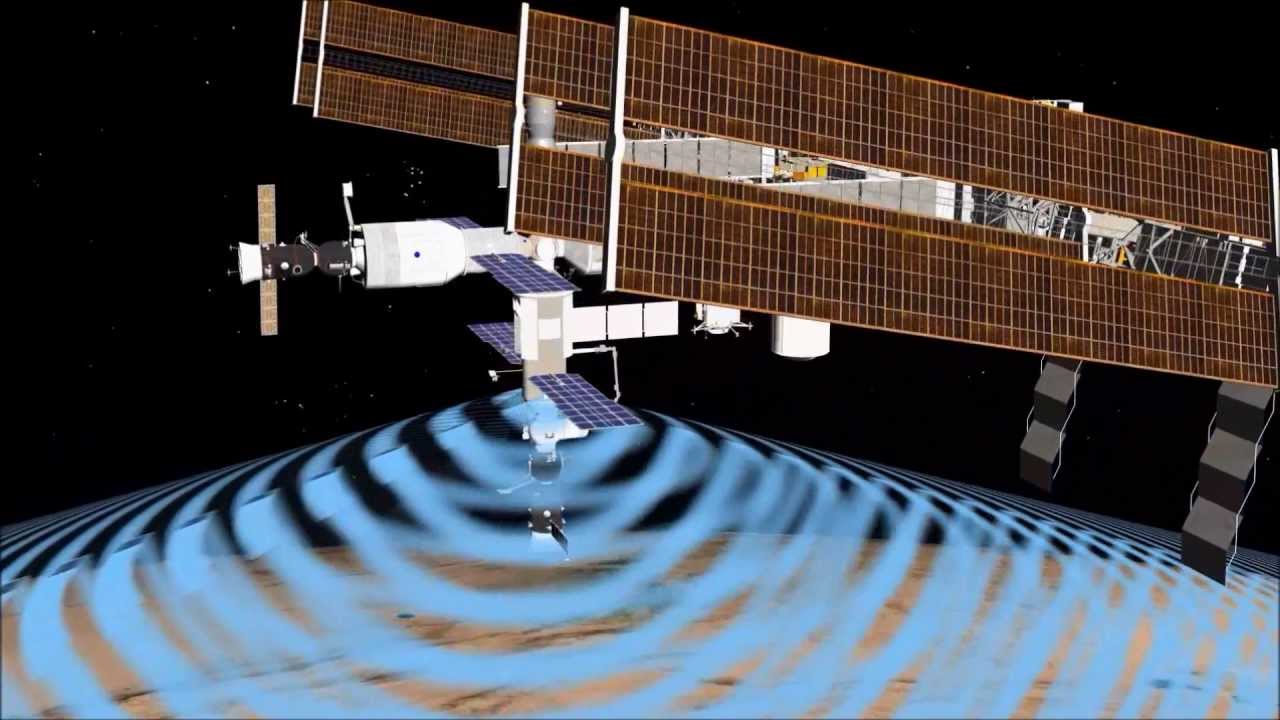
La Iniciativa Icarus, de International Cooperation for Animal Research Using Space, Cooperación Internacional para Investigación en Animales Usando el Espacio, tiene como objetivo colocar balizas GPS en todo tipo de animales para así poder establecer sus rutas de movimiento y hábitos....
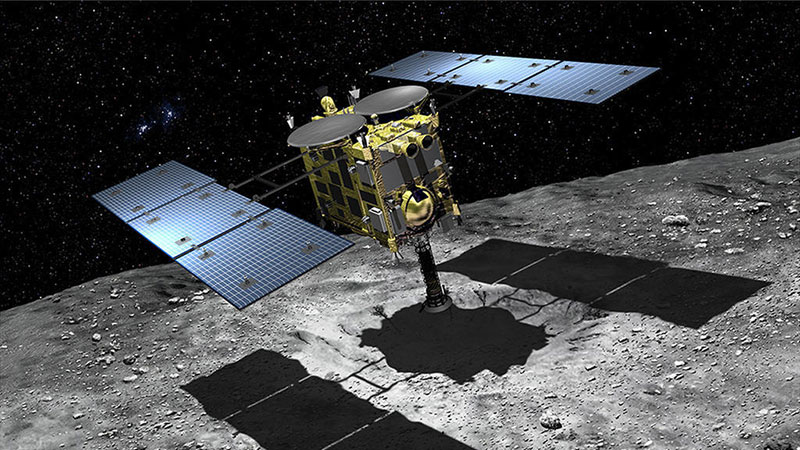
Impresión artíctica Hayabusa 2 tomando muestras en el cráter que ha creado, aunque ahora sabemos que esto no va a ser exactamente así – Akihiro Ikeshita/JAXA Tras estudiar los datos e imágenes obtenidas de la superficie del asteroide Ryugu después de haber...

Impresión artística del Complejo de lanzamiento 48 – NASA Mientras medio montón de empresas está intentando poner en lanzamiento cohetes pequeños destinados a poner cargas de alrededor de 300 kilos en órbita baja terrestre la NASA ha decidido construir al menos una...

Photon en primer plano frente a un Electrón - RocketLab Se me había pasado por completo en el momento de su anuncio hace unos meses que Rocket Lab ofrece ahora una plataforma para satélites artificiales además de su cohete Electrón. Photon, que...
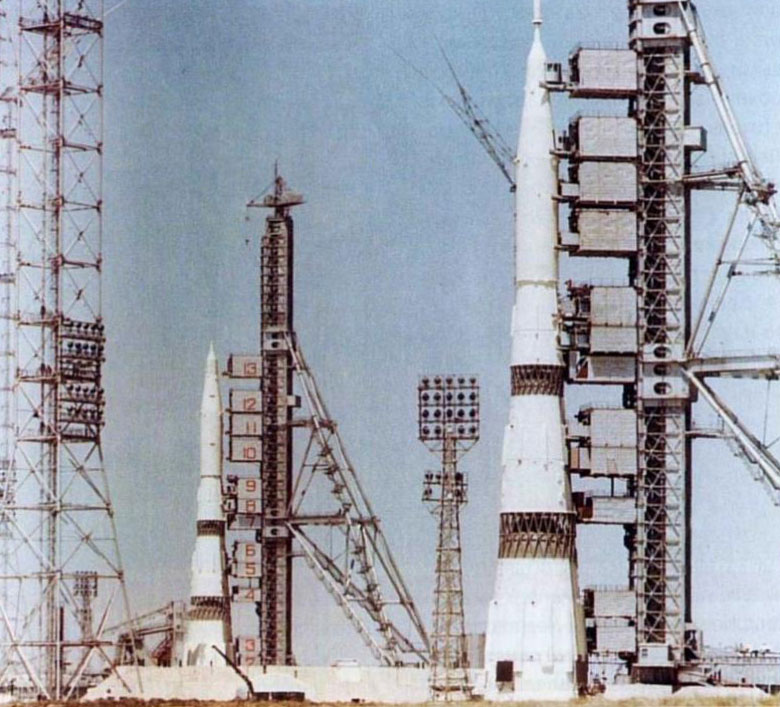
El 3 de julio de 1969 a las 21:18:32, hora peninsular española, el segundo cohete N1 soviético despegaba del Sitio 110 del cosmódromo de Baikonur. La idea era probar el funcionamiento del cohete –que ya había fallado en su primer intento...

Justo a las 13:00, hora peninsular española, tal y como estaba previsto, despegaba un simulador de una cápsula tripulada Orión para probar en vuelo su sistema de escape. El cohete que la lanzó estaba especialmente diseñado para la ocasión y preparado...

Se han hecho de rogar pero por fin tenemos vídeo de la primera prueba del sistema de recuperación de la primera etapa del Miura 5. Con una longitud total de 23 metros –17 para la primera etapa y 6 para la...

Behold the mole! Now with the support structure out of the way, my team has a view of the mole’s position. Read more on the plans to keep moving forward (and downward): https://t.co/9DmF5OANlO pic.twitter.com/mMthA5jrZ6— NASA InSight (@NASAInSight) July 1, 2019 Aunque hace...

Si todo va según lo previsto la NASA probará mañana, 2 de julio de 2019, el sistema de escape de la su cápsula tripulada Orión. Para ello un cohete especialmente diseñado para esta prueba, conocida como Ascent Abort-2, despegará del Complejo...

El primer lanzamiento de un cohete Electrón de Rocket Lab fracasó no por un fallo del cohete sino por un error en la configuración de los equipos de tierra. Así que es muy lógico que decidieran posponer 48 horas el lanzamiento...

Si todo va según lo previsto los técnicos de la Agencia India de Investigación Espacial (ISRO) habrán terminado hoy, 28 de junio de 2019, la integración de los tres módulos de la misión Chandrayaan-2. Los módulos son el aterrizador Vikram, l...

No se esperaba la decisión hasta el mes que viene pero la NASA ya ha anunciado que la próxima misión del programa New Frontiers va a ser Dragonfly. Dragonfly es un «dron» con ocho rotores que tiene como misión estudiar Titán,...

Make It Rain en la plataforma durante las pruebas previas al lanzamiento – Rocket Lab Rocket Lab tiene todo listo para lanzar su séptimo cohete Electrón, bautizado Make It Rain, desde su Complejo de lanzamiento 1 en Nueva Zelanda con siete satélites...

Despegue de la misión – SpaceX Con la confirmación del despliegue del Reloj Atómico de Espacio Profundo (DSX) tres horas y 34 minutos después del despegue SpaceX podía dar por terminada con éxito la segunda misión de un Falcon Heavy. Era una...
¡Contacto! – Roscosmos Un suave aterrizaje –suave estilo Soyuz– a 150 kilómetros al sureste de la ciudad de Zhezkazgan en Kazajistán a las 4:47, hora peninsular española, del 25 de junio de 2019 ponía fin a la misión de la cápsula Soyuz...

Earlier today, Oleg Kononenko of @ROSCOSMOS handed over @Space_Station control to cosmonaut Alexey Ovchinin. Kononenko will begin a journey back to Earth tomorrow alongside @AstroAnnimal and @Astro_DavidS after spending 204 days in space. Get more details: https://t.co/I96hHDhmjx pic.twitter.com/Ypvm4bBAbJ— NASA (@NASA) June 24,...

El cohete en el hangar con la segunda etapa al fondo - SpaceX SpaceX tiene todo listo para llevar a cabo el lanzamiento de la segunda misión de un Falcon Heavy; la de Starman a bordo del Roadster de Elon Musk fue...
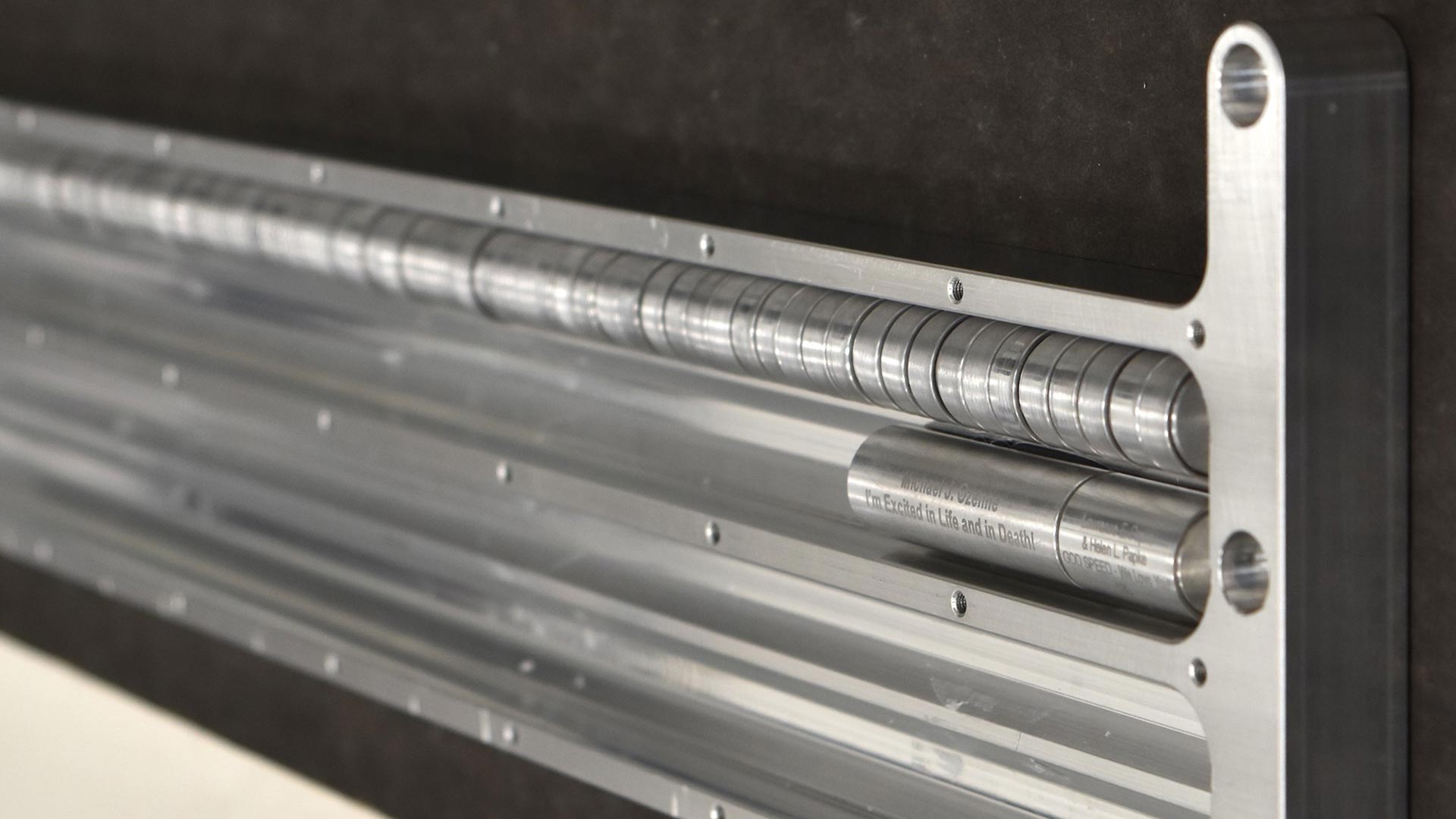
Una empresa llamada Celestis organiza el envío de cenizas de personas fallecidas al espacio. En el próximo lanzamiento del Falcon Heavy de SpaceX irán de hecho 152 restos humanos que se soltarán en órbita en unas pequeñas cápsulas metálicas para su...

Después de llegar a la Estación Espacial Internacional a bordo de la cápsula de carga Cygnus 11 uno de los Astrobee ya vuela libremente por el interior del segmento estadounidense de la Estación. Los Astrobee son la generación más reciente y...

Arianespace llevó a cabo con éxito su quinto lanzamiento de 2019 en la noche del 20 al 21 de junio. En este caso se trataba de colocar en órbita de transferencia geoestacionaria los satélites de telecomunicaciones Eutelsat 7C y T-16. El...

Primer y quizás único aterrizaje del Roc – Stratolaunch Vulcan, que es la empresa fundada en su momento por Paul Allen que gestiona sus otras empresas, ha puesto en venta Stratolaunch por 400 millones de dólares. Ese precio incluye Roc, el avión...

Un año de nuestro planeta visto con los ojos distantes del satélite meteorológico Himawari-8; una secuencia hipnótica que muestra la belleza, fragilidad y desastres que ocurren en la Tierra. Felix Dierich ha realizado este espectacular montaje titulado con imágenes del satélite...

En las últimas semanas el equipo de la sonda Hayabusa 2 de la Agencia Japonesa de Exploración Aeroespacial (JAXA) está preparando las cosas para llevar a cabo una segunda toma de muestras del asteroide Ryugu. Para ello han colocado un marcador...

Desde el 12 de junio de 2019 el segmento de la calle E de Washington que pasa por delante de las oficinas de la NASA en esa ciudad ha pasado a llamarse Hidden Figures Way. Es un homenaje a Katherine Johnson,...

Una típica mañana neblinosa californiana no ha sido impedimento para que SpaceX lanzara para Canadá al primer intento la constelación Radarsat de satélites de observación terrestre. Y es que los cohetes no van mirando por dónde van sino que se limitan...

Todo está listo en el Complejo de lanzamiento 4E de la Base de la Fuerza Aérea Vandenberg para el lanzamiento de la constelación Radarsat canadiense por parte de un Falcon 9 de SpaceX. La ventana de lanzamiento se abre a las...
Lanzado el 25 de agosto de 2003 el telescopio espacial Spitzer fue el último de los grandes observatorios de la NASA en ser lanzado, tras el telescopio espacial Hubble (1990), el Observatorio de Rayos Gamma Compton (1991) y el Observatorio Chandra...
Mientras se centra cada vez más en el programa Artemisa la NASA hacía públicos hace unos días las normas y precios que regularán el uso comercial del segmento estadounidense de la EEI. Estas actividades comerciales tienen que cumplir alguna de estas...
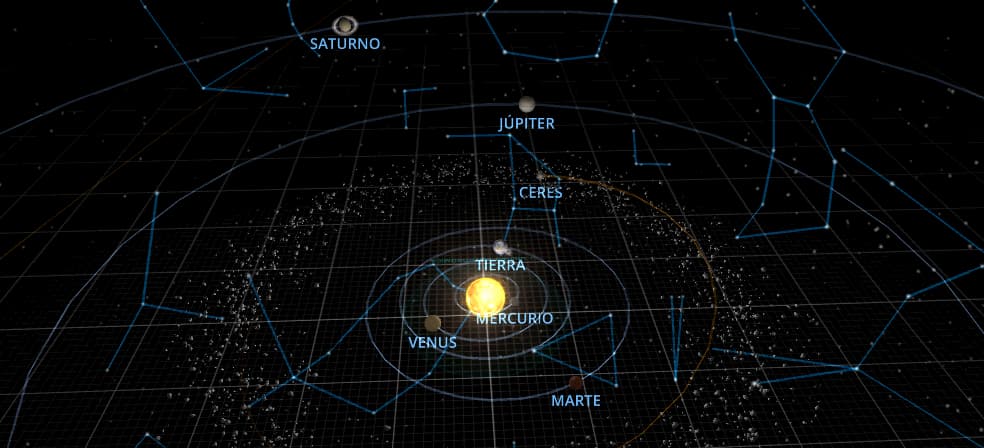
Jupiter estará en oposición, en su posición más cercana a la Tierra / Imagen: Solar System Scope(Nota: la imagen no está a escala) Uno de mis recuerdos más vívidos de cuando salía con el telescopio al campo a ver qué conseguía ver...

Partida de la Dragon 17 - NASA Partida de la Progress MS-10 – Roscosmos Con apenas unas horas de diferencia terminaban las misiones de las cápsulas de carga Dragon 17 y Progress MS-10 a la Estación Espacial Internacional. La Dragon 17 amerizaba...

Una plataforma flotante en el Mar Amarillo –un espaciopuerto flotante si utilizamos la terminología de SpaceX– ha servido como punto de despegue para el séptimo cohete Larga Marcha 11 lanzado por China. Ha sido la primera vez que China lanza un...

Interesante este tráiler de For all Mankind, una serie de once episodios producida por Apple TV+ y que se emitiría en otoño. (Ojo: no confundir con el documental de 1989 del mismo título). El principal gancho: tiene tras de sí la...
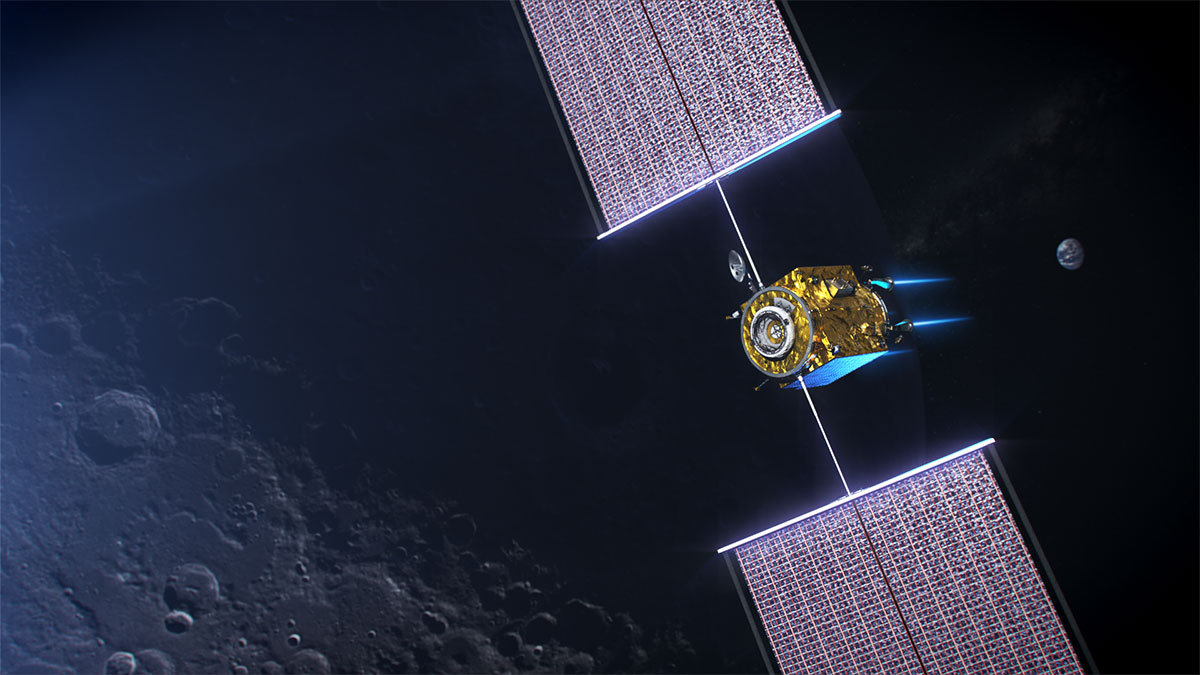
Impresión artística del PPE en órbita alrededor de la Luna – NASA Aunque aún no se sabe hasta cuando estará en servicio la Estación Espacial Internacional lo que parece claro es que el final de su uso por parte de las distintas...
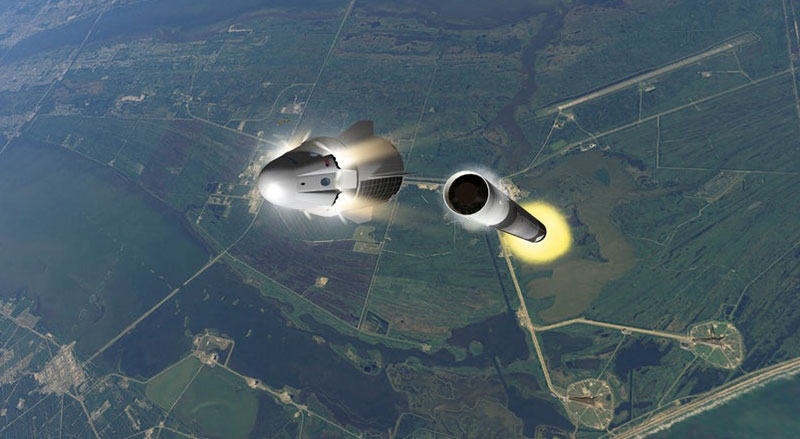
Aunque aún no está aclarado del todo lo que causó la destrucción durante unas pruebas en tierra de la primera cápsula Crew Dragon en volar a la Estación Espacial Internacional la NASA y SpaceX creen tenerlo lo suficientemente claro como para...

Primer y quizás único vuelo del Roc – Stratolaunch La empresa ni lo niega ni lo confirma más allá de decir que siguen operativos pero según Reuters, que cita a cuatro fuentes distintas, Stratolaunch va a cesar su actividad. Stratolaunch, fundada por...
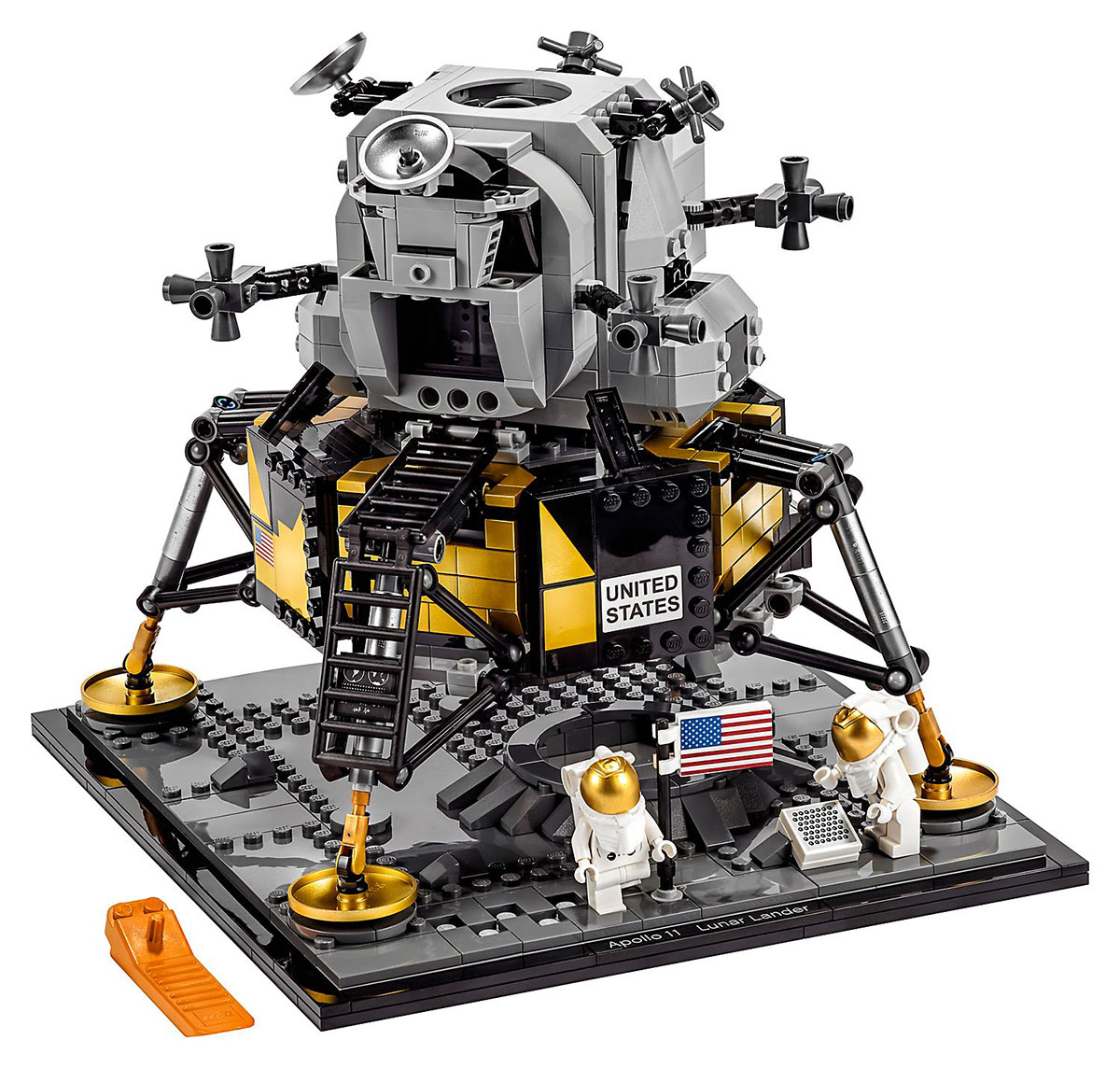
Según se acerca el aniversario del Apolo 11, la misión espacial que permitió a la humanidad poner pie por primera vez en otro astro, van apareciendo cada vez más homenajes a este momento histórico. Desde hoy está disponible este modelo en...
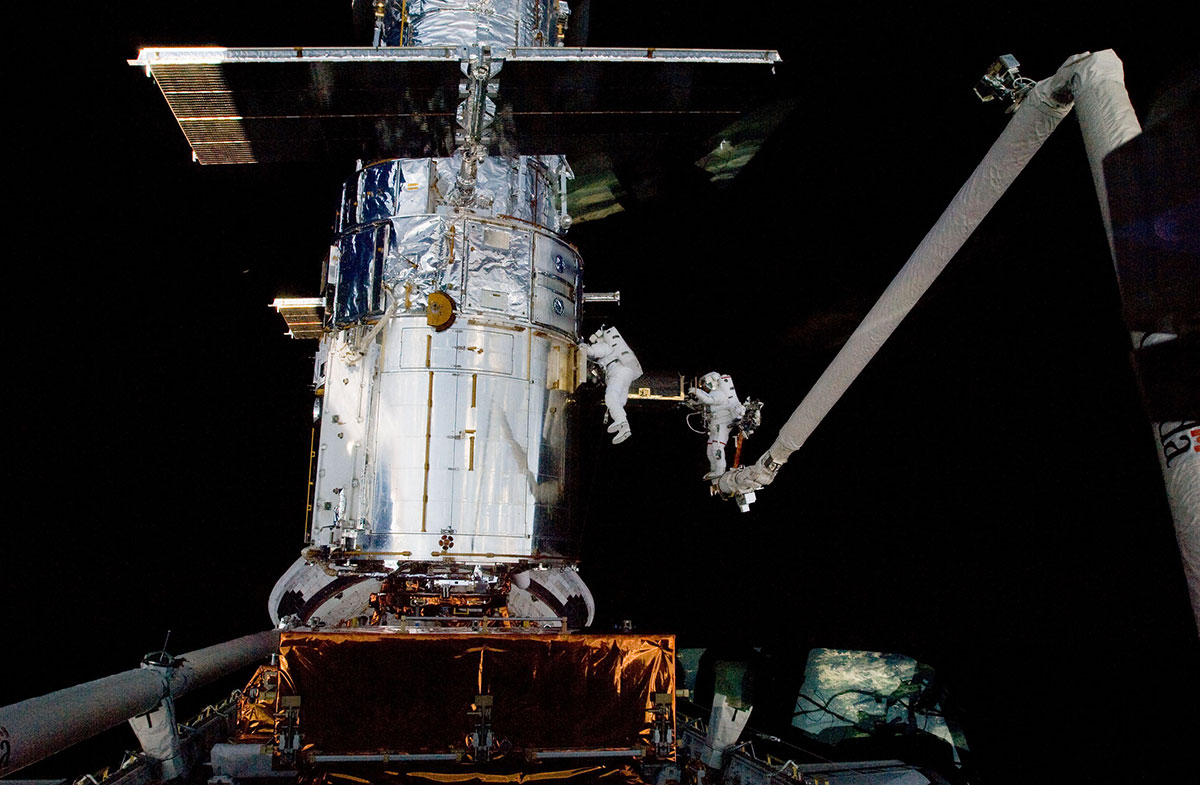
Aterrizaje del Altantis tras la misión STS-125 – NASA Hace unos días se cumplían diez años del final de la cuarta y última misión de mantenimiento del telescopio espacial Hubble. Durante ella la tripulación del Atlantis instaló nuevas cámaras en el telescopio,...

Tras retrasarlo en varias ocasiones la NASA por fin tiene fecha –en principio definitiva– para la prueba del sistema de escape de la cápsula tripulada Orión, conocida como Ascent Abort-2. La idea es comprobar que los motores diseñados para ello son...

El pasado 24 de mayo Marco Langbroek grababa este vídeo de los primeros 60 satélites Starlink de SpaceX apenas unas horas después de su lanzamiento. En él se ve claramente como los satélites, uno detrás de otro, cruzan el cielo. Eso...

Haciendo una vez más que lo difícil parezca sencillo SpaceX ha puesto en órbita en un solo lanzamiento los 60 primeros satélites de su constelación Starlink que si llega a completarse podrá dar literalmente acceso a Internet en todo el mundo....

Como en otras misiones anteriores –y es una tendencia cada vez más extendida– la NASA está dando la oportunidad a cualquiera que lo desee de enviar su nombre a Marte en un microchip que irá montado en la parte superior del...
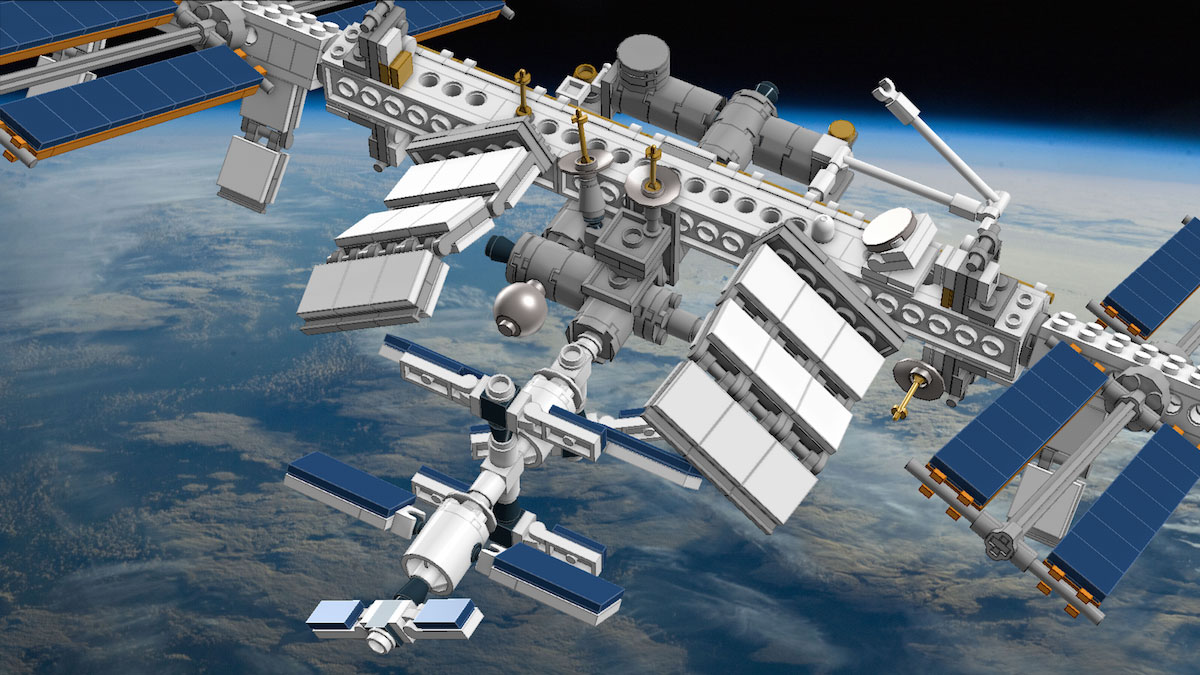
Hace unos días hablábamos del modelo en Lego de la Estación Espacial Internacional diseñado por Cristoph Ruge. A pesar de que consiguió reunir los 10.000 votos necesarios para que Lego considere una propuesta para su comercialización al final la empresa decidió...

Después de actualizar el software de a bordo de los satélites y comprobar por tercera o cuarta vez que todo está bien SpaceX está lista para volver a intentar en lanzamiento de la primera tanda de 60 satélites Starlink. El primer...

Relativity Space, una empresa fundada por sendos ex empleados de Blue Origin y SpaceX que sentían que ninguna de sus empresas estaba siendo suficientemente innovadora, trabaja para llevar a cabo el primer lanzamiento de pruebas de su cohete Terran 1 en...
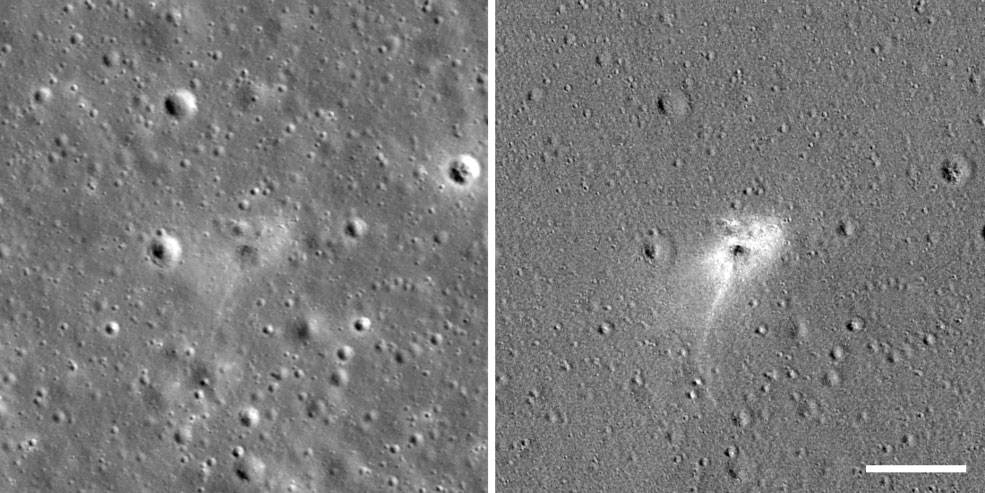
Impacto de Beresheet visto por la Lunar Reconnaissance Orbiter – NASA/GSFC/Arizona State University Apenas once días después del impacto del aterrizador israelí Beresheet contra la Luna la cámara de la Lunar Reconnaissance Orbiter de la NASA conseguía localizar y fotografiar las marcas...
Desde el pavoroso incendio de la catedral de Notre Dame de París arquitectos, diseñadores y gente de todo pelaje y condición ha enviado propuestas de lo más variopintas para su futura reconstrucción, a cual más alocada. Llevando un punto más allá...

A las 12:30 locales del 20 de mayo de 1969 el Saturno V AS-506 con el Módulo de mando CM-107 y el Módulo lunar LM-5 montados en su parte superior abandonaba el Edificio de ensamblado de vehículos montado en uno de...

Tras cancelar el primer intento de lanzamiento del primer lote de satélites Starlink debido a la presencia de vientos en altura demasiado fuertes SpaceX decidió ya no volver a intentarlo a las 24 horas. Mediante un tuit comunicaron que es para poder...

ARTEMIS: Twin sister of Apollo and goddess of the Moon. Now, the name for our #Moon2024 mission to return @NASA_Astronauts to the surface of the Moon by 2024, including the first woman and next man. pic.twitter.com/1K9qIloZwp— NASA (@NASA) May 13, 2019 Hace...

La semana pasada Jeff Bezos, el dueño de Amazon y también de Blue origin, hizo una presentación pública de Blue Moon, su aterrizador diseñado para llevar cargas a la superficie de la Luna. Se trata de un cacharro muy similar a...
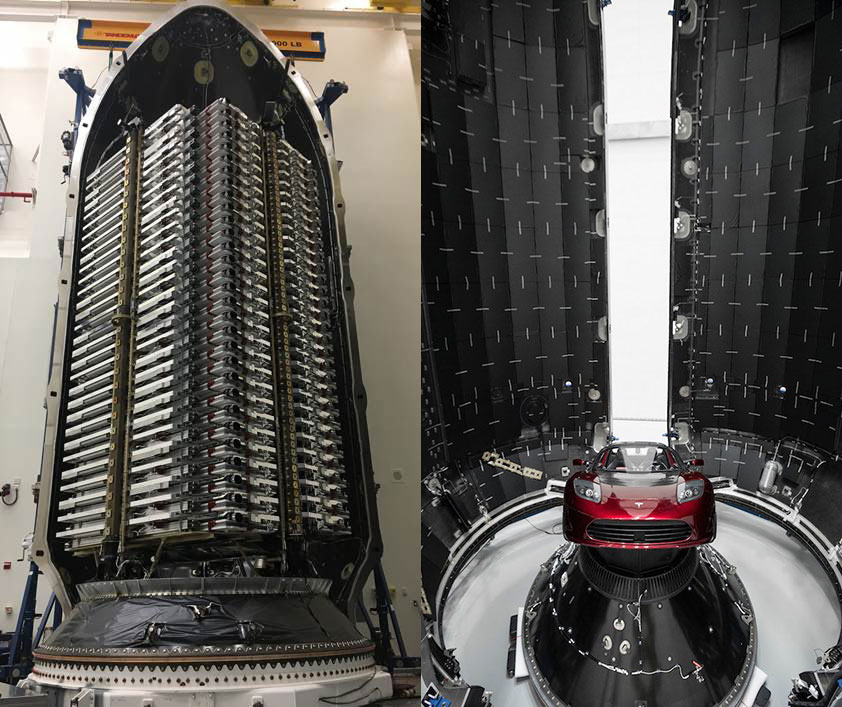
Como sardinas en lata comparados con Starman y su coche – Elon Musk A falta de la prueba estática del cohete que los pondrá en órbita SpaceX tiene todo listo para el lanzamiento de la primera tanda de satélites Starlink. Se trata...
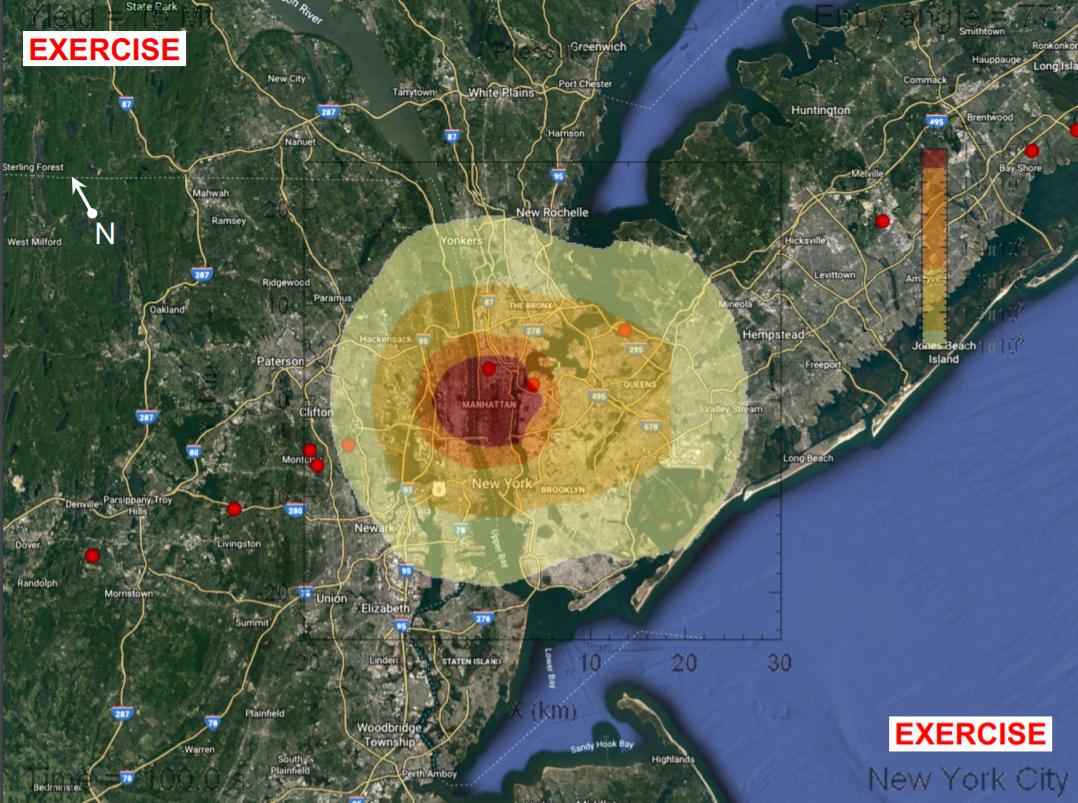
Hace unas semanas las agencias espaciales NASA y ESA, junto con la FEMA (emergencias) y quien se quisiera apuntar participaron en una simulación estilo «juegos de guerra» en la que el protagonista era un asteroide que iba a impactar contra la...
La cuarta misión comercial de Rocket Lab despegaba a las 8:00, hora peninsular española, de 5 de mayo de 2019, para poner en órbita las tres cargas útiles de su cuarta misión comercial, en este caso con el Departamento de Defensa...

Con un día de retraso por haber tenido que sustituir un generador eléctrico en el espaciopuerto flotante Os Course I Still Love You la cápsula de carga Dragon 17 despegaba a las 8:48:58, hora peninsular española, del 4 de mayo de...
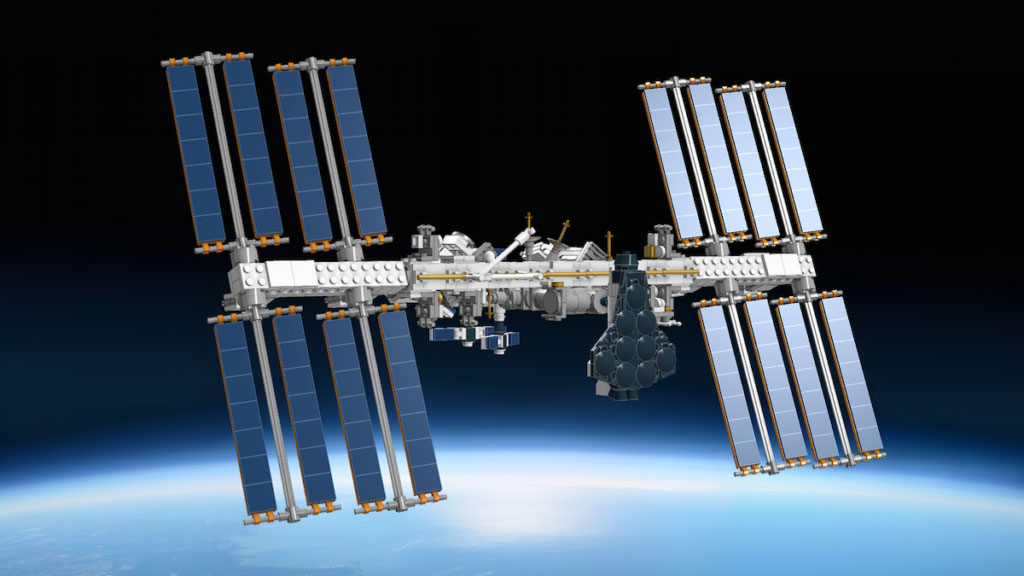
La EEI de Lego de Cristoph Ruge Christoph Ruge, más conocido como XCLD en Lego Ideas, propuso un modelo de la Estación Espacial Internacional con la idea de que se convirtiera en un producto comercial. Pero aunque alcanzó los 10.000 votos necesarios...

That's A Funny Looking Cactus Rocket Lab lo tiene todo listo en su Complejo de lanzamiento 1 situado en Nueva Zelanda para lanzar su sexto cohete Electron en la que será la cuarta misión comercial de la empresa. El That's A Funny...
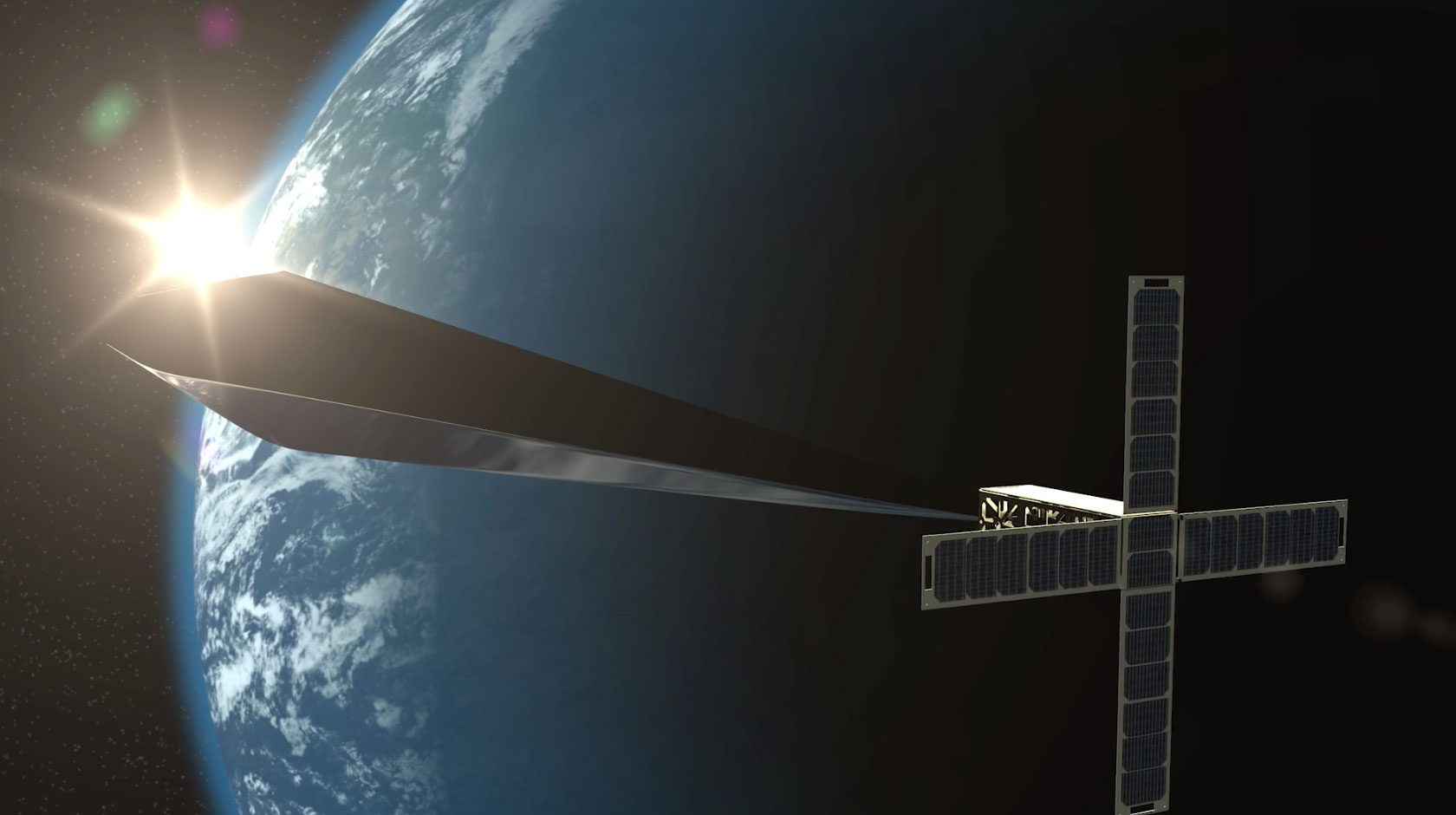
Orbital Reflector era una obra de arte destinada al espacio concebida por Trevor Paglen en colaboración con el Museo de Arte de Nevada. Consistía en un gran globo de un plástico similar al mylar en forma de diamante alargado de unos...
La NASA ha publicado este zoom del Hubble Legacy Field, que es como han llamado al mosaico de 7.500 fotografías de una pequeña parte del cielo tomadas durante 16 años, en el que se calcula que pueden verse ni más ni...

John D. Boswell, más conocido en Internet como melodysheep, ha creado OPPY: The Life of a Rover, un vídeo en el que en un par de minutos rinde homenaje a los 14 años de actividad de Opportunity en Marte. Está hecho...

Con un par de minutos de retraso sobre el horario previsto Blue Origin llevaba a cabo el decimoprimer lanzamiento de un cohete reutilizable New Shepard a las 15:32, hora peninsular española, del 2 de mayo de 2019. La misión se desarrolló...

Tras la prueba estática del cohete que va a utilizar para ella SpaceX tiene todo listo para lanzar la misión cápsula de carga Dragon CRS-17 rumbo a la estación Espacial Internacional. Pero un problema con el sistema eléctrico de la Estación ha...

El último Consejo de Ministros del Gobierno de España antes de las elecciones generales del 28 de abril de 2019 ha aprobado un aumento del techo de la participación española en los programas espaciales de la Agencia Espacial Europea en el periodo...

Este fantástico vídeo de BBC Earth y SentItToSpace.com muestra algo difícil de ver: un eclipse total desde gran altitud (38 km) grabado con una cámara que proporciona imágenes 360 VR. Todo convenientemente montado y con explicaciones detalladas. Se puede disfrutar desde...

The Goddesses of Venus: A topographic map es una infografía con un precioso mapa topográfico de Venus obra de Eleanor Lutz que gira alrededor de varias ideas, especialmente que los lugares, estructuras y detalles de Venus tienen prácticamente todos nombres de...

Comunicado de SpaceX sobre la anomalía sufrida por la Crew Dragon: A lo largo del día de hoy SpaceX llevó a cabo una serie de pruebas de los motores de la Crew Dragon en nuestras instalaciones de pruebas en la Zona...

La Cygnus NG-11 tras su captura por el Canadarm 2 – David Saint-Jacques/CSA Después de ser capturada por el Canadarm 2, el brazo robot de la Estación Espacial Internacional, a las 11:28, hora peninsular española, del 19 de abril de 2019 la...

La Cygnus NG-11 en la plataforma de lanzamiento – NASA/Bill Ingalls Northrop Grumman tiene todo listo en el Complejo de lanzamiento Wallops para lanzar la cápsula de carga Cygnus NG-11 hacia la Estación Espacial Internacional. Bautizada como S.S. Roger Chaffee lleva a...

La etapa central segundos después de su aterriaje – SpaceX Pues ya es mala suerte que después de haberla hecho aterrizar sin problemas en el Of course I Still Love You a SpaceX se le haya caído al agua la primera etapa...

Este curioso vídeo muestra cómo es el día a día en la adaptación de 20 ejemplares de ratones hembra al ambiente de la Estación Espacial Internacional. Se enviaron allá arriba en 2014; las imágenes están grabadas en el interior de sus...
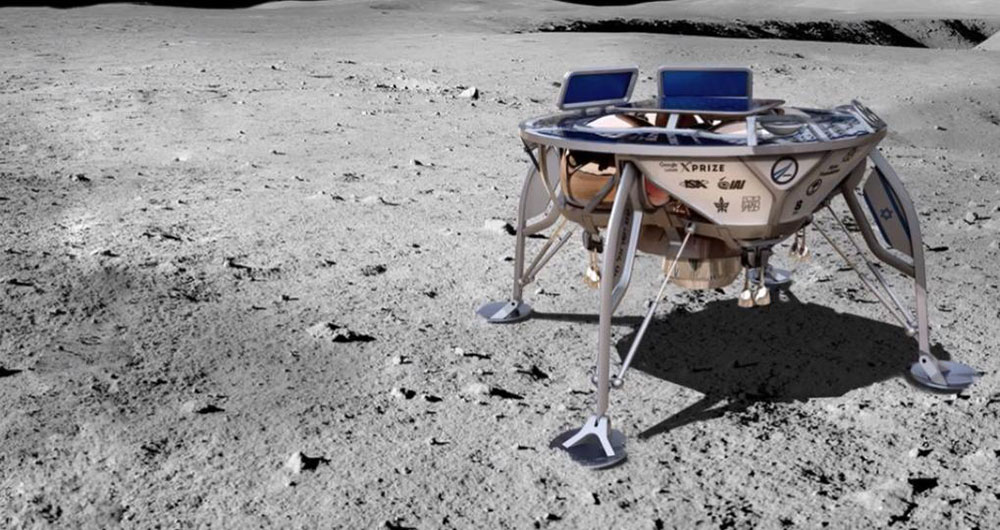
Impresión artística de cómo habría estado Beresheet tras aterrizar en la Luna – Space Team IL Un fallo del motor minutos antes del alunizaje hizo que el pasado 11 de abril el aterrizador israelí Beresheet terminara estampado contra la superficie de la...
El 9 de enero de 1969 la NASA anunció que la tripulación del Apolo 11, la primera misión que intentaría posarse en la Luna, iba a estar compuesta por Neil Armstrong como comandante, Buzz Aldrin como piloto del modulo lunar, y Michael...

Una vez completadas sus pruebas en tierra Roc, el avión diseñado por Scaled Composites para Stratolaunch, llevó a cabo su primer vuelo el 13 de abril de 2019. Estuvo 149 minutos en el aire durante los que alcanzó una velocidad máxima...

SpaceX lo ha clavado con la primera misión real de un Falcon Heavy. Desde el lanzamiento hasta la puesta en la órbita deseada del satélite de telecomunicaciones Arabsat-6A pasando por la recuperación de las tres primeras etapas y hasta de la...

Impresión artística de Beresheet alunizando – Space Team IL Desde las 21:23, hora peninsular española, del 11 de abril de 2019 la Luna tiene un nuevo cráter causado por el impacto del aterrizador Beresheet. El intento de aterrizaje de Beresheet comenzó a...

Hoy es el día de la verdad para Beresheet y su equipo. Si todo va según lo previsto a eso de las 21:05, hora peninsular española, del 11 de abril de 2019 el pequeño aterrizador empezará su maniobra para intentar posarse...

Todo está listo para el lanzamiento de la primera misión de un Falcon Heavy de SpaceX. La carga útil será el satélite de telecomunicaciones Arabsat-6A. El despegue se producirá desde el Complejo de lanzamiento 39A, el mismo que la NASA usó para...
Hace tiempo que había rumores al respecto pero al tener que solicitar los permisos pertinentes se ha confirmado: Amazon está dispuesta a entrar en el mercado del acceso a Internet vía satélite. El Proyecto Kuiper, según la documentación presentada por la...

Desde 2003 la Fundacion Innovación Bankinter viene celebrando el Future Trends Forum. Son reuniones en las que un grupo de expertos tratan tendencias en innovación, analizando su impacto en la sociedad y modelos de negocio y de las que sale un...
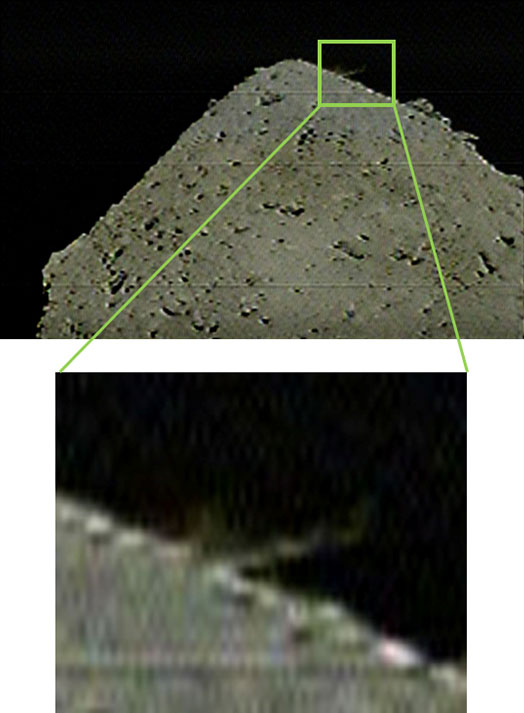
Esta imagen puede no parecer gran cosa. Pero sirve de prueba de que la sonda Hayabusa 2 de la Agencia Japonesa de Exploración Aeroespacial (JAXA) ha cumplido con otro de los hitos de su misión. Operando de forma autónoma a unos...
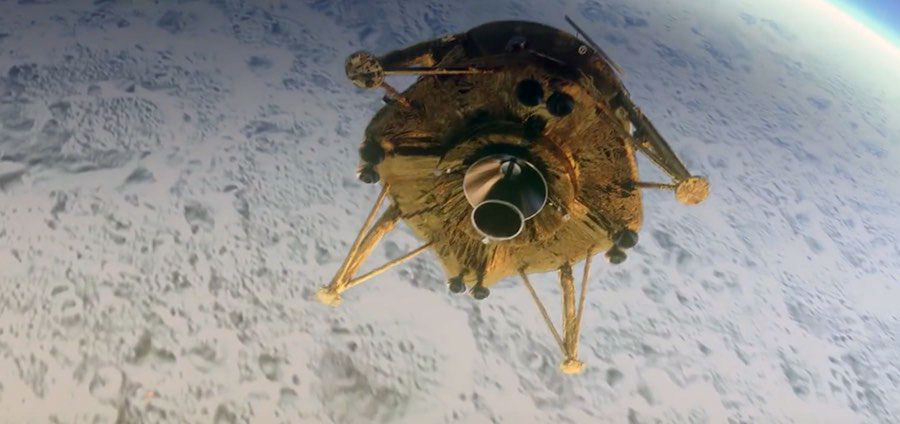
En una maniobra crucial para la misión el motor del aterrizador lunar Beresheet funcionó durante seis minutos entre las 16:18 y las 16:24, hora peninsular española, del 4 de abril de 2019 para reducir su velocidad de tal forma que la...

LA cápsula de carga Progress MS-11 atracaba en el compartimento Pirs de la Estación Espacial Internacional a las 16:22, hora peninsular española, del 4 de abril de 2019. Tan sólo tres horas y 22 minutos después de despegar de Baikonur, lo...

Mientras vemos cómo les va a Beresheet con su entrada en órbita alrededor de la Luna y a Hayabusa 2 con su «bombardeo» del asteroide Ryugu podemos ir disfrutando de dos lanzamientos orbitales a cargo de otros tantos cohetes Soyuz. El...

Momento del disparo del instrumento SCI de Hayabusa 2 La sonda Hayabusa 2 de la Agencia Japonesa de Exploración Aeroespacial (JAXA) está lista para empezar con una de las operaciones más ambiciosas de su misión. La idea es hacerle un cráter nuevo...
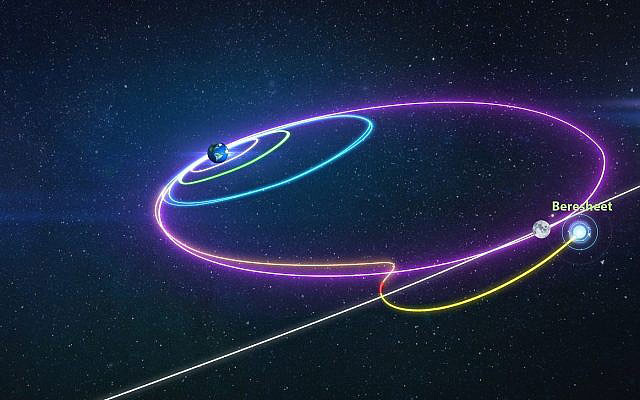
La Tierra vista por Beresheet el 30 de marzo de 2019 antes de despedirse de ella para siempre Aunque tuvieron algunos problemas al inicio de la misión el equipo de Beresheet los ha superado todos y el aterrizador lunar ya está listo...

Con un poco de retraso para sus planes de llevar a cabo doce lanzamientos este año Rocket Lab ha lanzado con éxito su tercera misión comercial. Aunque el retraso se produjo, todo hay que decirlo, porque la carga útil no estuvo...

El RLV-T5, el cohete que la empresa china Link Space está usando para desarrollar su cohete parcialmente reutilizable New Line 1, ha conseguido un importante hito al hacer su primer vuelo libre. Durante la prueba alcanzó unos 20 metros de altura...

Anne McClain saliendo al espacio por primera vez Estaba previsto que hoy Christina Koch y Anne McClain llevaran a cabo un paseo espacial para sustituir algunas de las baterías de la Estación Espacial Internacional por otras nuevas y de diseño más moderno....

El primer OS-M mientras perdía el rumbo - vía LaunchStuff Un par de minutos después del lanzamiento, y tras la separación de la segunda etapa, el primer cohete OS-M de OneSpace perdía el rumbo. Terminaría cayendo a tierra poco después. Las causas...

El Edificio de Ensamblaje de Vehículos de la NASA en el Centro Espacial Kennedy, y su versión en Lego, por Ryan Olsen. Minimalista pero con mucho estilo y realismo, incluyendo un cohete ya ensamblado, la zona de aparcamientos y algunos edificios...

Tras el fallo del lanzamiento del primer cohete ZhuQue-1 de LandSpace todo parece listo para que OneSpace se convierta en la primera empresa privada china en hacer un lanzamiento orbital. Siempre que su primer cohete OS-M se comporte como es debido....

Impresión artística de PRISMA en órbita – Arianespace Un cohete Vega –el número 14– de Arianespace que despegaba a las 2:50 del 22 de marzo de 2019, hora peninsular española, ponía en órbita el satélite PRISMA de la Agencia Espacial Italiana (ASI)....

TJ Cooney, de I need more space, hace una entrevista en este vídeo a Oli Braun, que aunque en el MundoReal™ trabaja como director de fotografía y artista de animación en 3D cada vez dedica más y más tiempo a los...
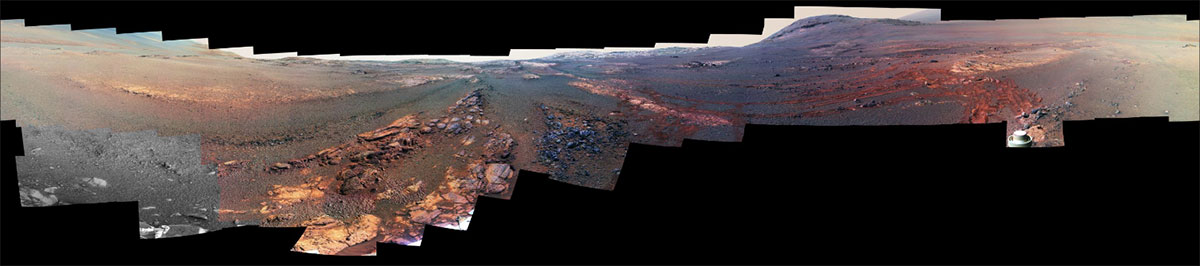
Última foto panorámica enviada por Oportunity – NASA/JPL-Caltech/Cornell/ASU. Llevan ya meses en los servidores de la NASA pero hasta que la agencia dio por finalizada la misión de Opportunity –no sin antes intentar todo lo posible para recuperar el contacto con el...
El proyecto Earthling («Terrícola») es una especie de reboot de algunos de los proyectos como el mensaje de Arecibo (que revivió hace poco) y los discos dorados de las sondas Voyager (que también hace poco cumplieron 40 años). Detrás de la...

Welcome to our new crewmates, @AstroHague, @Astro_Christina and Alexey! Happy to have two of my 8-ball classmates as roommates on @Space_Station. pic.twitter.com/mFcLWPTdvK— Anne McClain (@AstroAnnimal) 16 de marzo de 2019 Tal y como estaba previsto la cápsula tripulada Soyuz MS-12 atracaba en...

En la plataforma – NASA/Victor Zelentsov Todo está listo en el cosmódromo de Baikonur para el lanzamiento de la cápsula tripulada Soyuz MS-12 rumbo a la Estación Espacial Internacional. Está previsto para las 20:14, hora peninsular española, del 14 de marzo de...

Momento del amerizaje de la DM-1 – NASA TV Un amerizaje a algo menos de 400 kilómetros de la costa de Florida a las 14:45, hora peninsular española, del 8 de marzo de 2019 ponía fin a la primera misión de una...
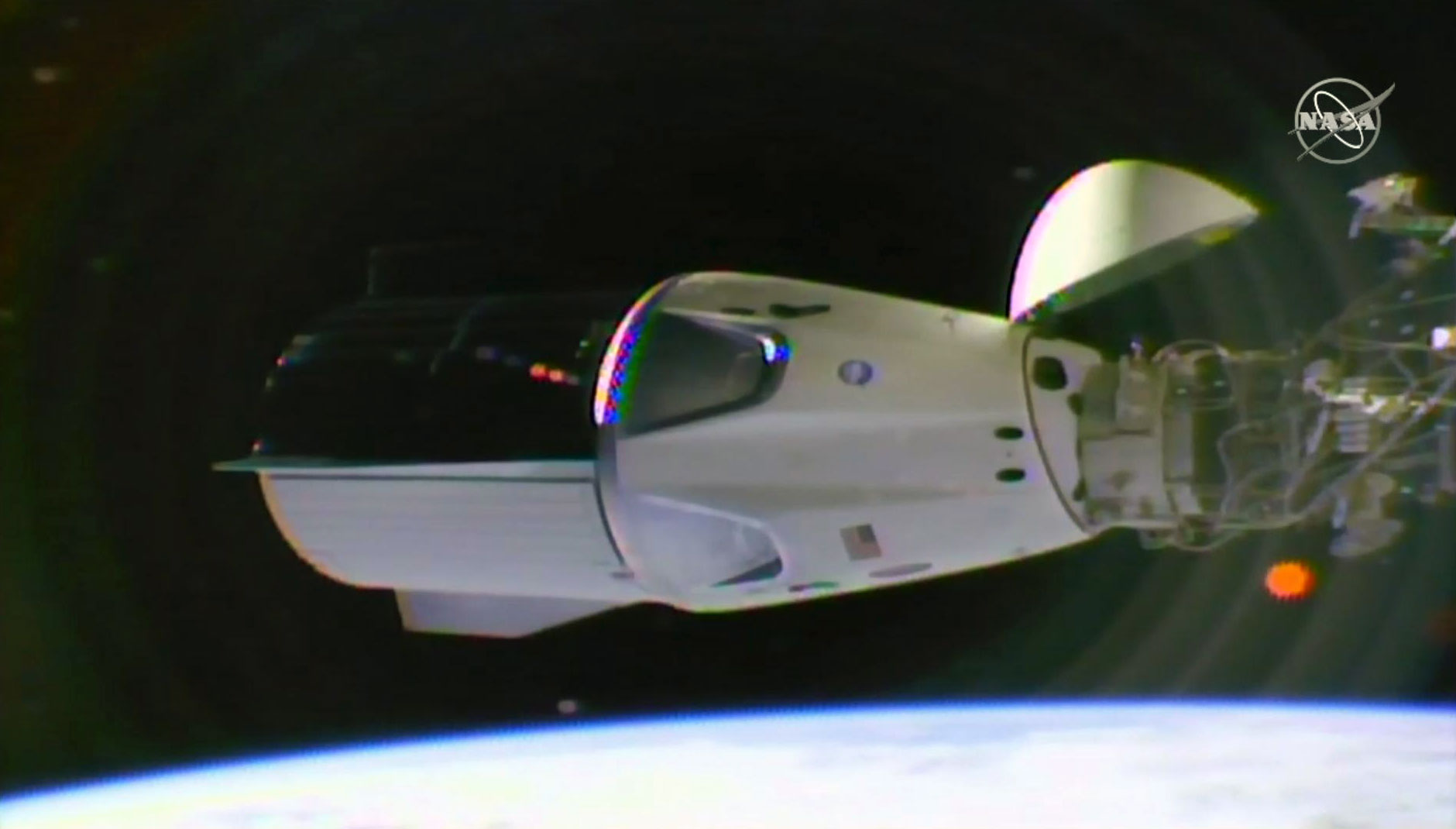
.@AstroAnnimal welcomes humans aboard the first @SpaceX #CrewDragon to visit the station and introduces two special guests, Ripley and Little Earth, ushering in the era of @Commercial_Crew. #LaunchAmerica pic.twitter.com/QqzEEgDWzt— Intl. Space Station (@Space_Station) 3 de marzo de 2019 Aquí tenemos a Anne...

Earth floats gently in zero gravity pic.twitter.com/XUH3KeDPVe— Elon Musk (@elonmusk) 2 de marzo de 2019 Ese peluche de la Tierra flotando en caída libre indica el momento en el que la primera Dragon 2 de SpaceX entraba en órbita rumbo a la...

Magnetic Orion / Foto: NASA, SOFIA, D. Chuss et al. & ESO, M. McCaughrean et al. Esta curiosa foto astronómica del día seleccionada por la NASA se titula Magnetic Orion y muestra cómo son los campos magnéticos llegan a afectar al polvo...

Todo está preparado en la plataforma 39A del Centro Espacial Kennedy para el lanzamiento de la primera misión de prueba de una cápsula Dragon 2 o Crew Dragon de SpaceX, conocida oficialmente como SpaceX Demo-1 o SpX-DM1 para abreviar. Es la...
Me ha encantado este entrañable vídeo que ha hecho Wired en el que nuestro admirado Chris Hadfield reflexiona sobre 13 fotos –hey, es un astronauta, no sufre de triscaidecafobia– que identifican otros tantos momentos memorables de su vida y que le...
Impresión artística del «Canadarm 3» – CSA/NASA Con el fin de la Estación Espacial Internacional cada vez más cercano –algunos de sus módulos llevan ya más de 20 años en órbita– los socios que participan en ella llevan ya algún tiempo pensando...
El Soyuz-STB con una etapa superior Fregat que tenía que encargarse del lanzamiento de la primera tanda de satélites de OneWeb cumplió a la perfección con su misión e insertó los seis satélites en la orbita inicial prevista con una precisión...
El intrincado camino de Beresheet hacia la Luna Apenas lleva cinco días en el espacio y el equipo de Beresheet, la primera misión privada a la Luna ya se ha tenido que enfrentar a dos problemas que seguro que les están quitando...

Todo está listo en el espaciopuerto de Kourou para el lanzamiento de la primera tanda de satélites de OneWeb. Correrá a cargo de un Soyuz-ST, que es la variante de este cohete adaptada a las especificaciones de Arianespace. No es la...
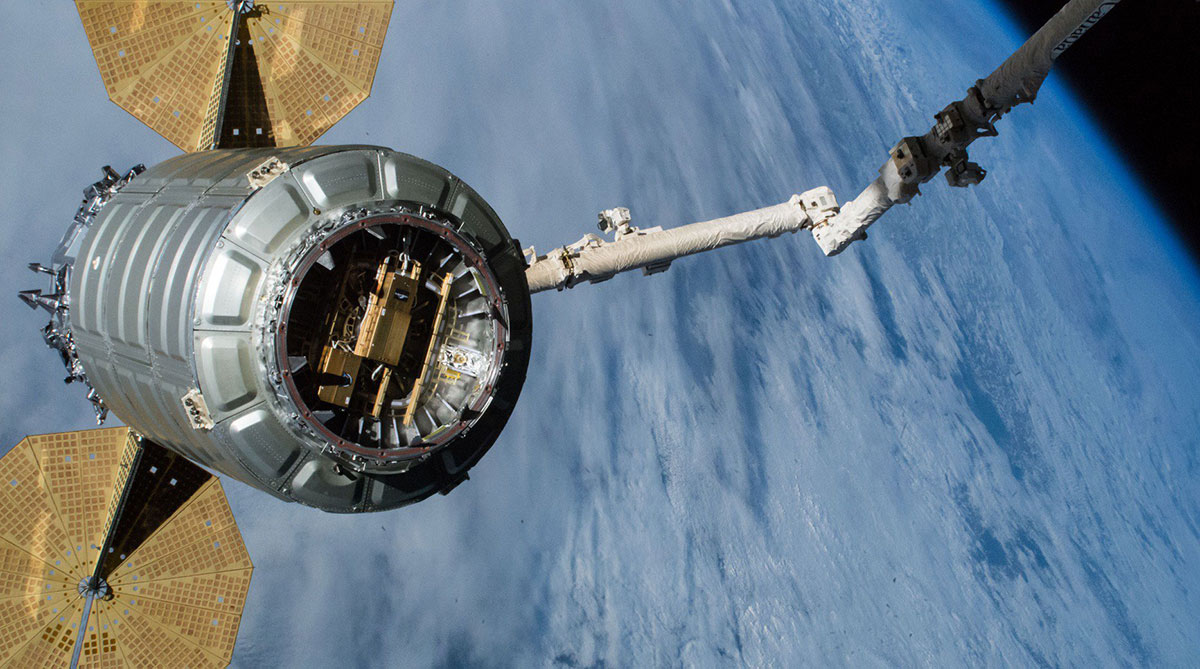
Una reentrada controlada a las 10:05 del 25 de febrero de 2019, hora peninsular española, ponía fin a la misión de la cápsula de carga Cygnus NG-10, bautizada como S.S. John Young. La cápsula había dejado la Estación Espacial Internacional el...
Hoy en día podemos ver imágenes aéreas y de satélite de prácticamente cualquier lugar de la Tierra desde nuestro teléfono móvil mientras esperamos en la cola de la charcutería. ¡Vivimos en el futuro! Pero hace cincuenta años esto era alta tecnología...

Close-ups from the Kuiper Belt! #NewHorizons has sent home its sharpest images from the #UltimaThule flyby, revealing new details about the farthest object ever explored by spacecraft. https://t.co/vKTWJPUFEG pic.twitter.com/MDvUzW8dL7— NASA New Horizons (@NASANewHorizons) 22 de febrero de 2019 Aunque aún falta más...
Impresión artística de una Dragon 2 atracando en la EEI – NASA Tras haber superado con éxito su flight readiness review (FRR) la primera misión de prueba de una Dragon 2 o Crew Dragon a la Estación Espacial Internacional ya tiene todos...

Como viene siendo habitual –aunque no deberíamos considerarlo rutinario nunca– SpaceX se ha apuntado otro lanzamiento sin problemas de uno de sus Falcon 9. La primera etapa de este en concreto era la tercera vez que iba al espacio y ha...
A 30 metros de altura y subiendo – JAXA Esta imagen, captada por la sonda Hayabusa 2 de la Agencia Japonesa de Exploración Aeroespacial (JAXA) a unos 30 metros de altura mientras subía tras haber tocado la superficie del asteroide Ryugu con...
Hello, Earth. Footage from the boom of SpaceShipTwo pic.twitter.com/i6jdsjrRRB— Virgin Galactic (@virgingalactic) 22 de febrero de 2019 Con una velocidad máxima de Mach 3,04 y una altitud de 89,9 kilómetros el SpaceShipTwo bautizado como VSS Unity realizaba hoy su segundo vuelo al...

Mientras la sonda Hayabusa 2 intenta llevar a cabo su primera toma de muestras de la superficie del asteroide Ryugu todo está listo en el Complejo de lanzamiento 40 de la Estación de la Fuerza Aérea de Cabo Cañaveral para el...

Un Soyuz-2-1b con una tercera etapa Fregat-M fue el encargado de inaugurar 2019 en lo que se refiere a los lanzamientos orbitales rusos. El lanzamiento se produjo a las 17:47, hora peninsular española, desde el cosmódromo de Baikonur y en principio...

Impresión artística de Hayabusa 2 tomando muestras – JAXA Todo está listo para que a las 00:13 del 21 de febrero de 2019, hora peninsular española, la sonda Hayabusa 2 de la Agencia Japonesa de Exploración Aeroespacial (JAXA) inicie su primer intento...

Después de probar con éxito su red el satélite RemoveDEBRIS ha probado, también con éxito, un arpón diseñado para capturar basura espacial. El disparo fue contra un fragmento de material similar al que se usa en los paneles exteriores de los...

Anne McLain en la Soyuz MS-11 - NASA Desde que en 2011 retirara del servicio los transbordadores espaciales la NASA no tiene otra forma de enviar astronautas a la Estación Espacial Internacional –o a cualquier otro destino, de hecho– que comprando asientos...
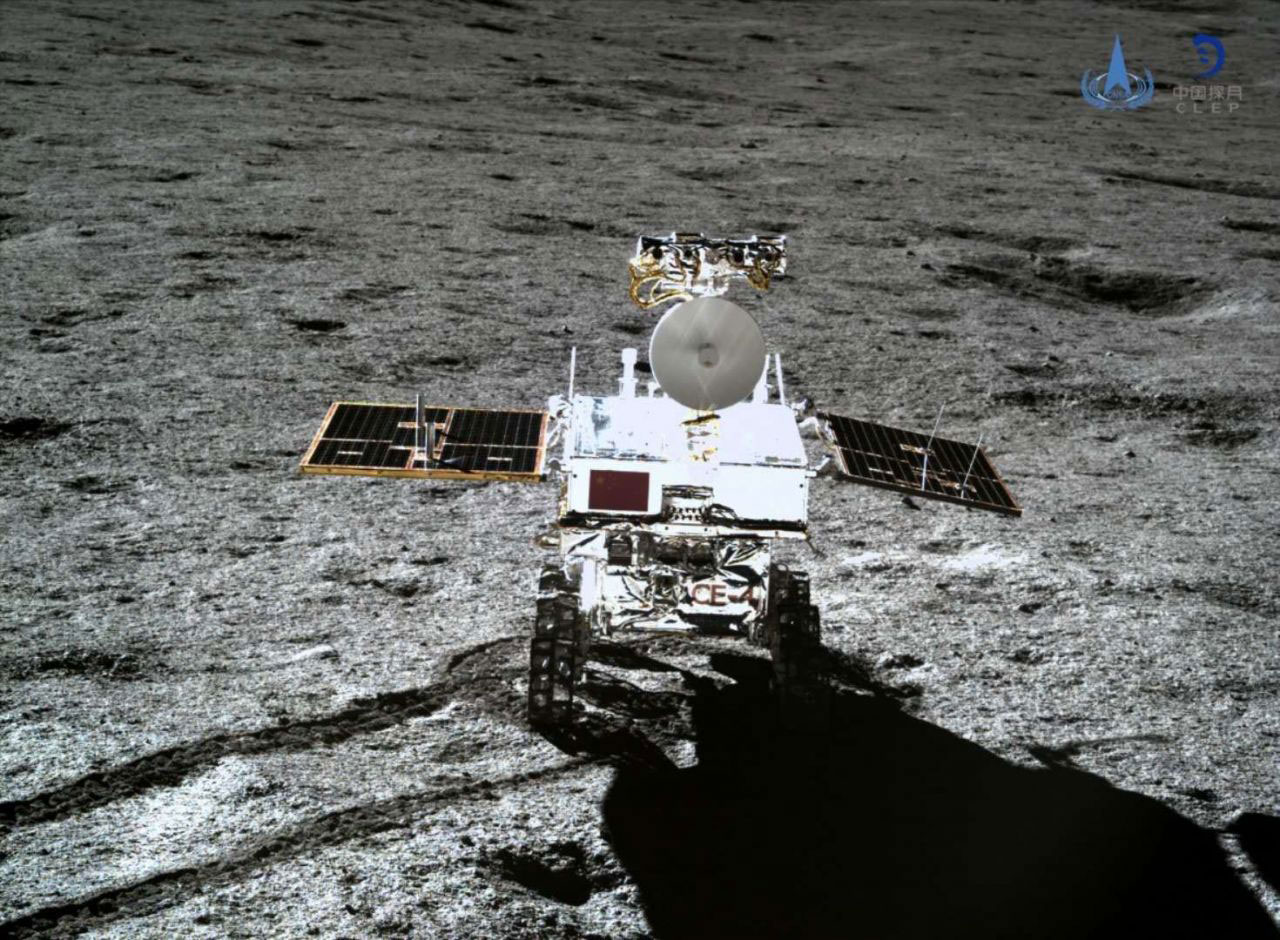
Yutu 2 visto por el aterrizador de la misión - CLEP/CNSA Poco antes de entrar en reposo para pasar su segunda noche lunar Yutu 2, el rover de la misión china Chang'e 4 a la cara oculta de la Luna, alcanzaba los...

The gang’s all here: my seismometer, its cover, and now the heat flow probe! It’s no easy task to set up such sensitive instruments on the surface of another world. Together we’ll unlock some of #Mars’ deep secrets. pic.twitter.com/77nGAaBi6L— NASA InSight (@NASAInSight)...
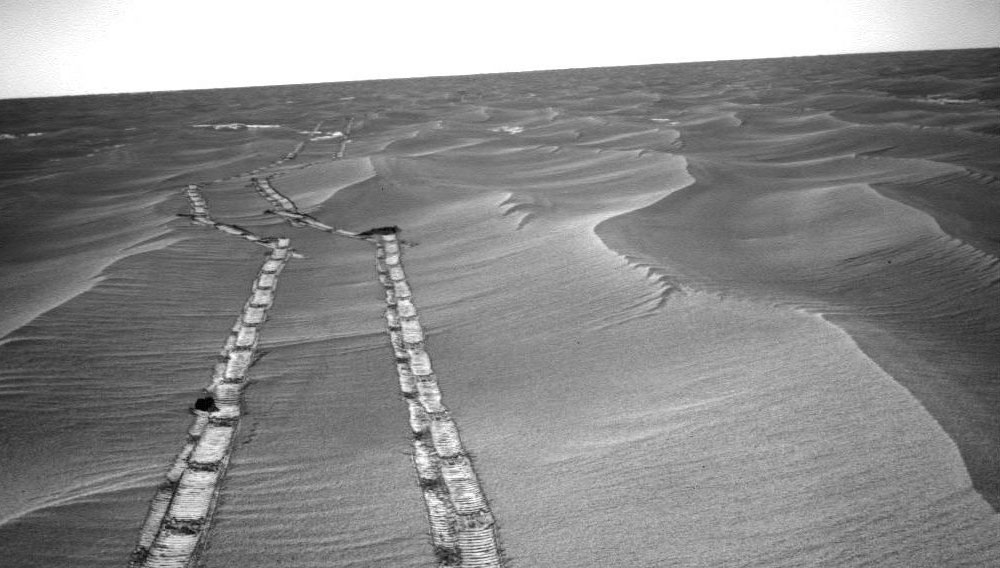
Ocho meses después de haber perdido el contacto con él y después de haberlo intentado todo y un poco más para recuperarlo la NASA por fin ha tenido que aceptar que la misión de Opportunity ha terminado. Pero vaya misión. Diseñado...

Una foto promediada con imágenes del VIIRS/NASA, proyección Mercator / Johannes Kroeger Johannes Kroeger se entretuvo en recopilar todas las imágenes del radiómetro VIIRS (Visible Infrared Imaging Radiometer Suite) que orbita nuestro planeta en un satélite para construir una «imagen promedio» de...
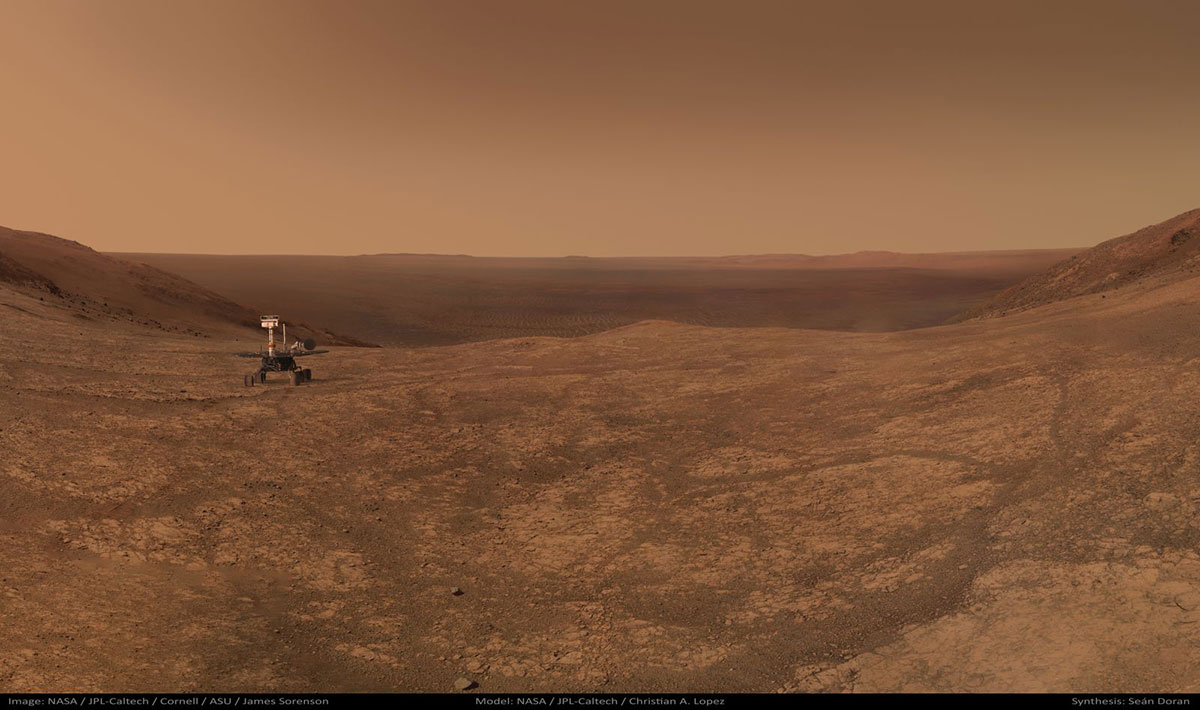
Imagen: NASA/JPL Caltech/Cornell/ASU/James Sorenson - Modelo de Opportunity: NASA/Jpl Caltech/Christian A. López - Composición: Seán Doran En junio de 2018 una densa tormenta de polvo cubrió la zona de Marte en la que está el rover Opportunity, dejándolo sumido en la oscuridad...

Para sorpresa de prácticamente nadie –y creo que para el que menos para Bas Lansdorp, su fundador– un tribunal suizo ha declarado en bancarrota a Mars One. Se ve que no sirvió de nada que la comprara una empresa de pagos...

Una nueva actualización del proceso de construcción del complejo de lanzamiento desde el que Arianespace espera empezar a lanzar los Ariane 6 en 2020, así que no les queda mucho tiempo para completarlo. En este caso se corresponde a enero de...
Llega un poco tarde para hacer honor a su subtítulo, pues la NASA cumplió 60 el pasado 1 de octubre de 2018, pero The NASA Archives: 60 Years in Space es uno de esos libros que tentará seriamente a quienes sufran...
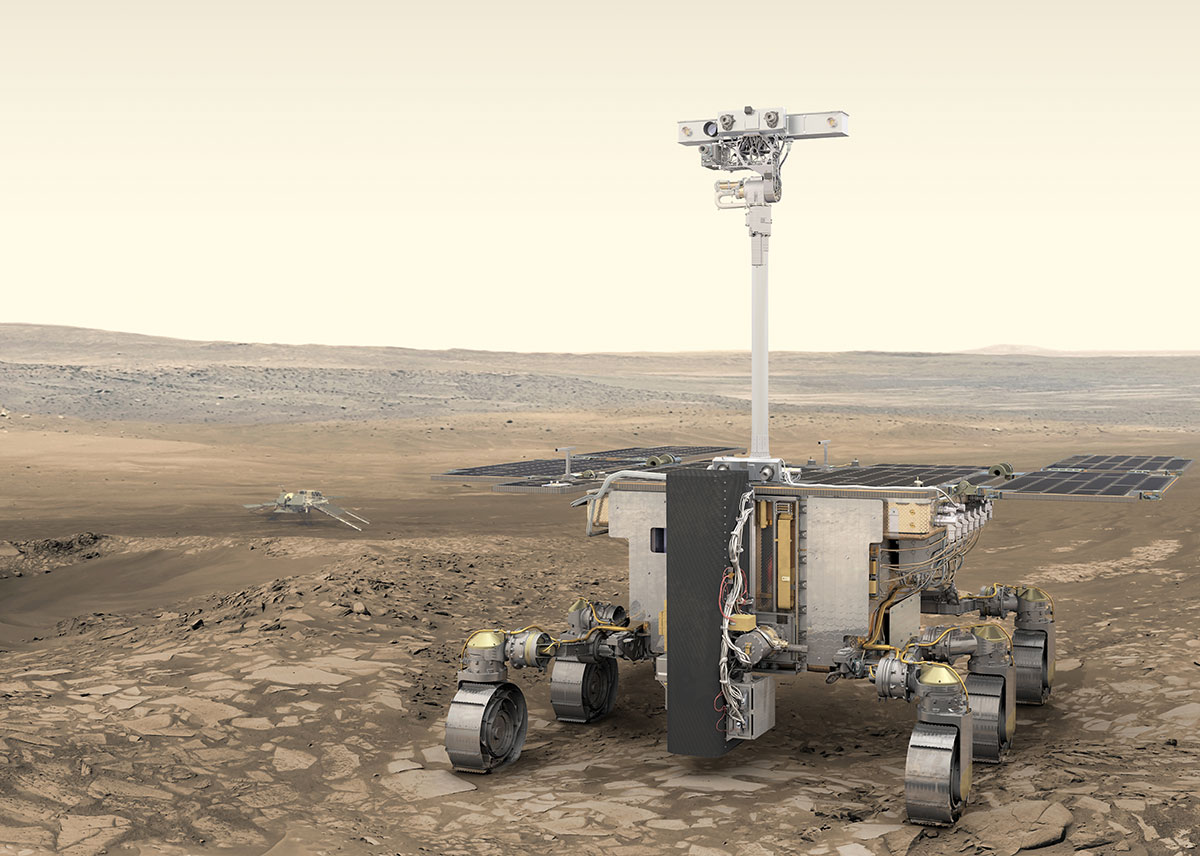
La ciencia y la vida cotidiana no pueden ni deben ser separadas.– Rosalind Franklin La Agencia Espacial Europea acaba de anunciar que de las más de 36.000 propuestas recibidas en el concurso público para poner nombre al rover de la misión...
Hoy hace un año desde que la imagen de los dos propulsores laterales del primer Falcon Heavy aterrizando juntos se nos quedaba grabada en la memoria para siempre a todas las personas del mundo que sufrimos de esa curiosa condición conocida...

Tal y como estaba previsto a las 22:01 del 5 de febrero de 2019, hora peninsular española, el Ariane 5 ECA encargado de poner en órbita de los satélites de comunicaciones Saudi Geostationary Satellite 1/Hellas Sat 4 (HS-4/SGS-1) y GSAT-31 despegaba...

Unas fotos y unos vídeos en la cuenta de Twitter de Elon Musk confirman que SpaceX ha encendido por primera vez una versión lista para el vuelo de su motor Raptor, que es el que equipará su futuro Starship/Super Heavy (mientras...
Este sistema graba los datos de todos los componentes y le dice al ordenador principal de la Estación Espacial que «no está ardiendo» una vez por segundo, porque es muy importante no estar ardiendo en el espacio (…) Perdonadme que insista...

El primer Ariane 5 de 2019 – CNES/ESA/CSG/Arianespace/S.Martin Un Ariane 5 ECA está listo en la plataforma de lanzamiento ELA-3 del espaciopuerto de Kourou para el primero de los lanzamientos de 2019 de Arianespace. En este caso se trata de poner en...

Like a flying saucer, the protective dome of the SEIS seismometer of the @NASAInSight probe has gently landed on the Martian surface. pic.twitter.com/2DdcIaPuSf— SEIS (@InSight_IPGP) 2 de febrero de 2019 Con la instalación del Escudo térmico y contra el viento (Wind and...
El Solar Orbiter, la misión de la Agencia Espacial Europea con destino al Sol, ha dado un importante paso adelante con el fin de las pruebas térmicas del modelo de vuelo. El prototipo de modelo de vuelo, o proto flight model...

Si esto en vez de ser una animación 3D fuera una película sería muy antigua: unos 13.000 millones de años, cuando el joven Universo tenía «tan solo» unos 400 millones de años de antigüedad. Las simulaciones astrofísicas renacentistas son los cálculos...
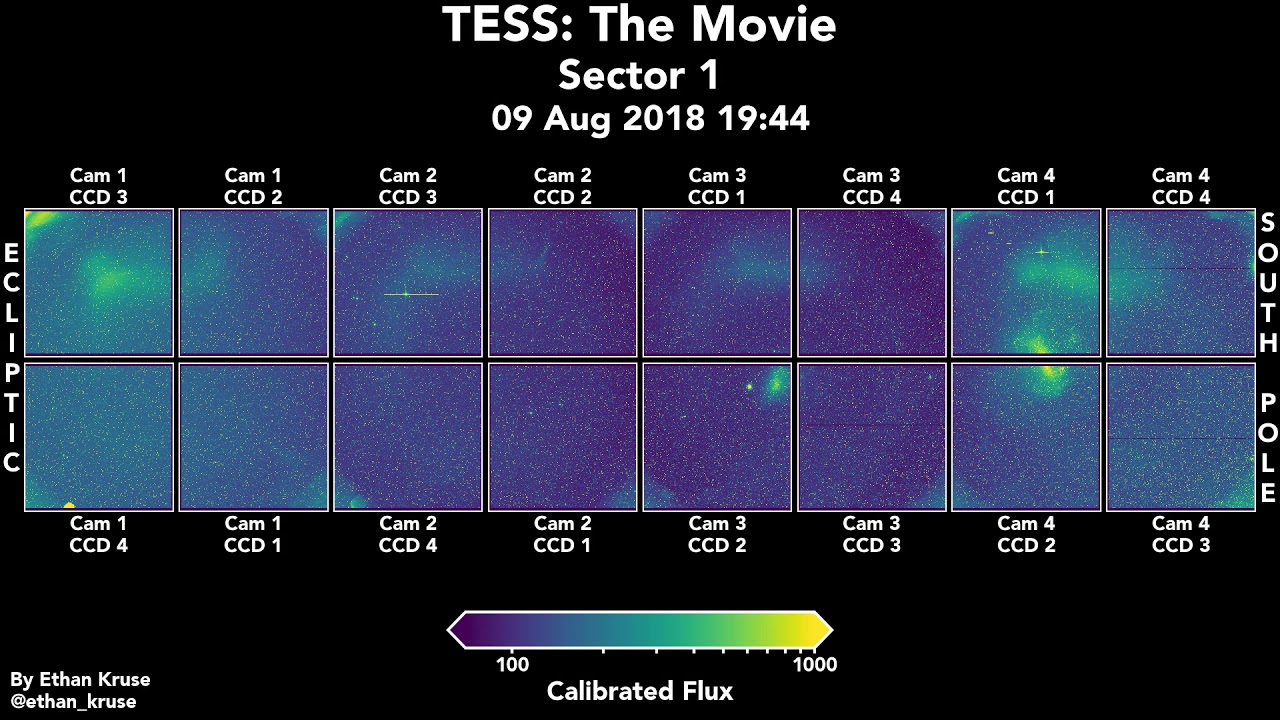
Lanzado el 19 de abril de 2018 el observatorio espacial TESS de la NASA tiene como único objetivo en la vida descubrir planetas extrasolares de esos que están en órbita alrededor de otras estrellas. Para ello mira fijamente el cielo con...
Yutu 2 visto por el aterrizador - CLEP/CNSA Después de soportar temperaturas de hasta -190 ºC durante la noche lunar –que dura dos semanas– el rover Yutu 2 se despertaba a eso de las 13:00, hora peninsular española, del 29 de enero...
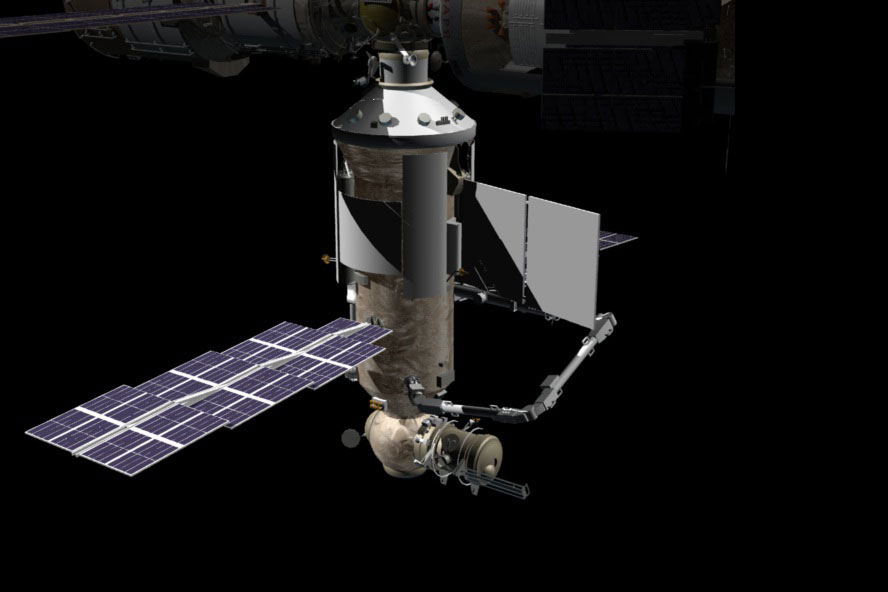
En octubre de 2016 Rusia confirmaba que debido a los continuos retrasos en el lanzamiento del Módulo Laboratorio Multipropósito Nauka (Ciencia), previsto inicialmente para 2007, iba a reducir la tripulación de su segmento de la Estación Espacial Internacional a dos personas....
El 3 de diciembre de 2018 despegaba la misión SSO-A que desplegó 64 cargas más o menos útiles en órbita sincrónica al Sol. Era la primera vez de la historia que se usaba un cohete dedicado para un lanzamiento compartido en...
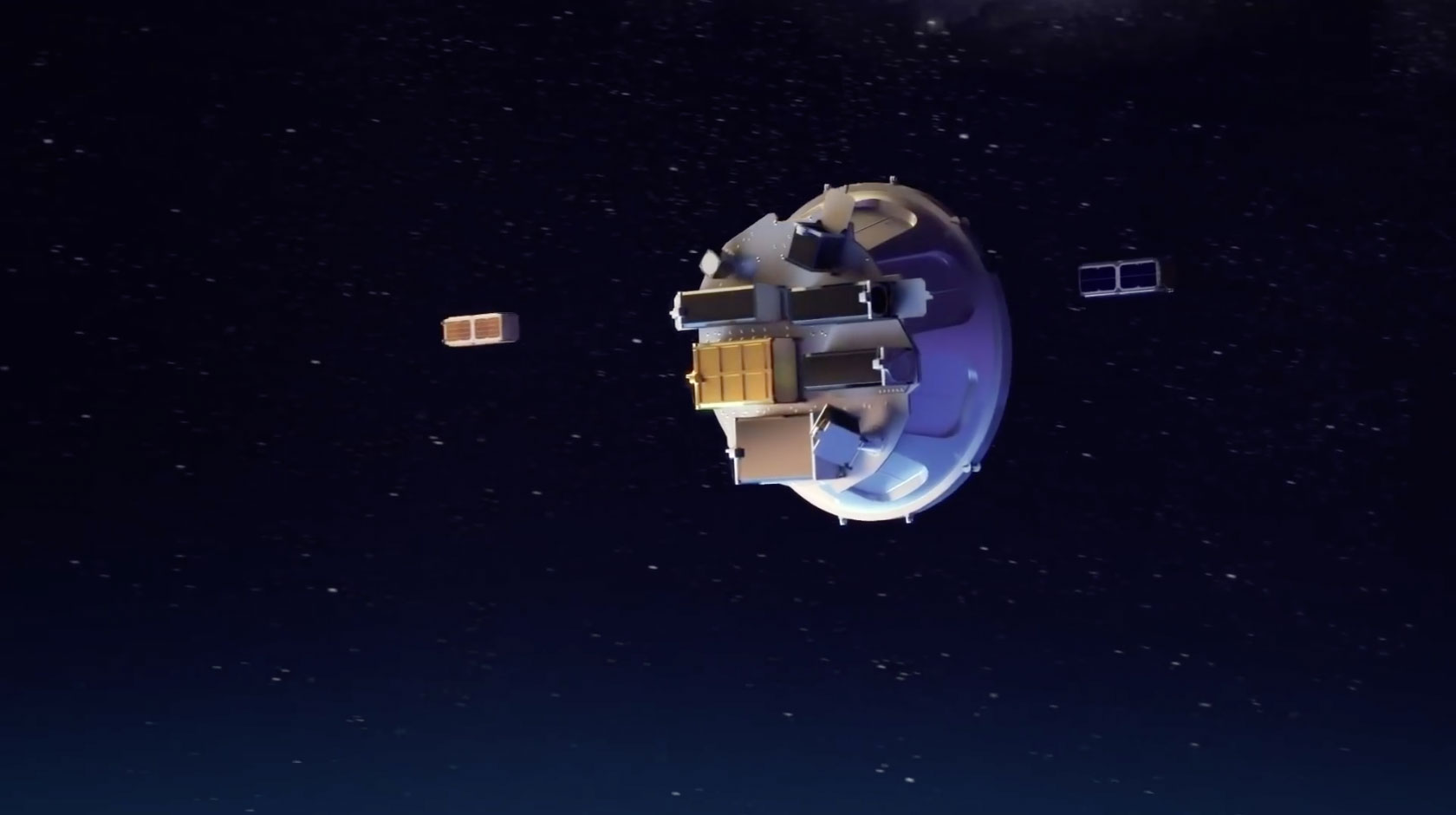
Cuando Rocket Lab lanzó su primer cohete Electron sorprendió a propios y extraños con el hecho de que disponga de una tercera etapa opcional que se puede utilizar para hacer circulares las órbitas en las que coloca las cargas útiles. Este...
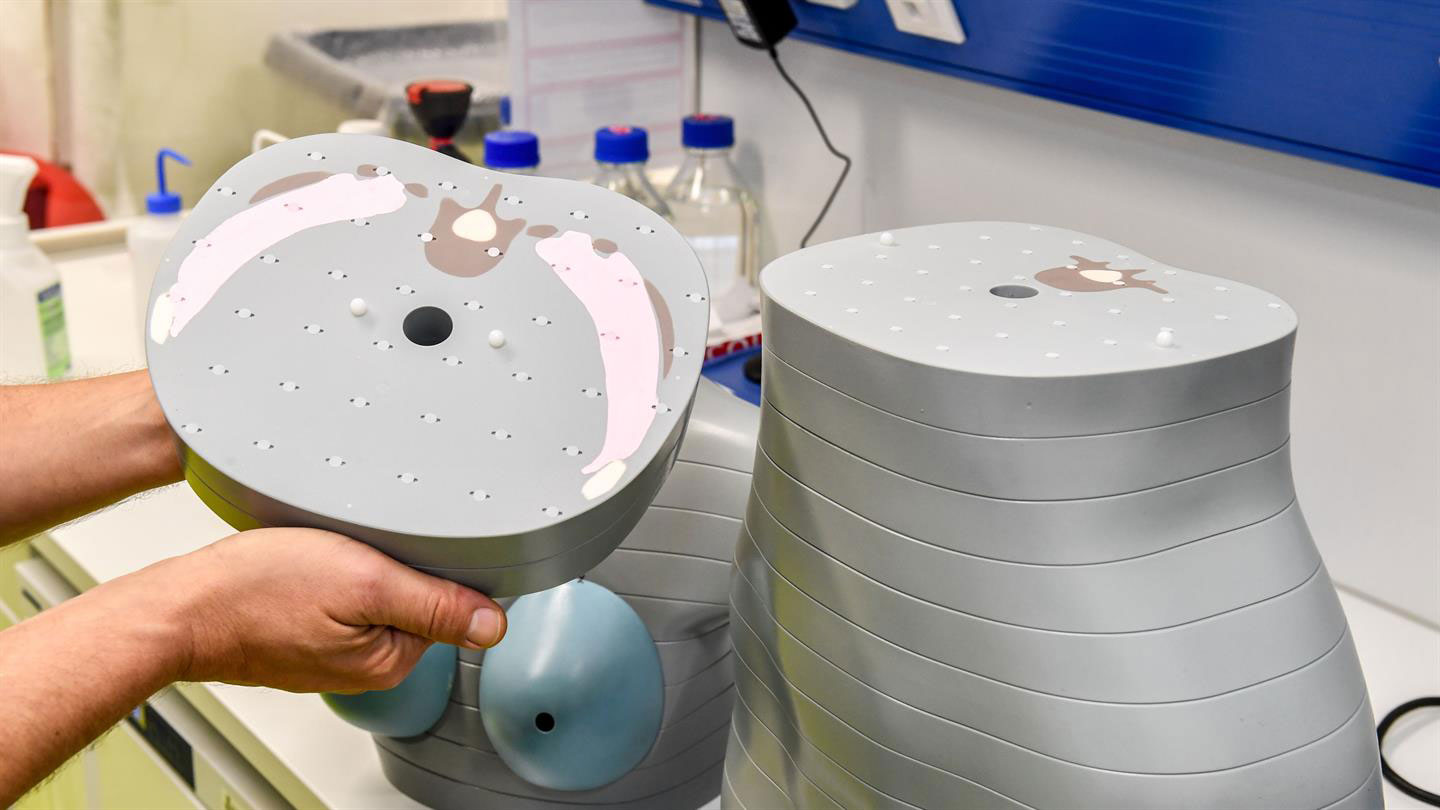
Si no sufre más cambios la primera misión de una cápsula Orión de la NASA durará unas tres semanas, una de las cuales las pasará en órbita alrededor de la Luna. Como primera misión que es no llevará tripulantes humanos aunque...
Just 161 days after launching from Florida, our #ParkerSolarProbe recently completed its first orbit of the Sun, reaching the point in its orbit farthest from our star. The @NASASun probe is now preparing for its next solar flyby in April 2019: https://t.co/NcDLMNlZl1...
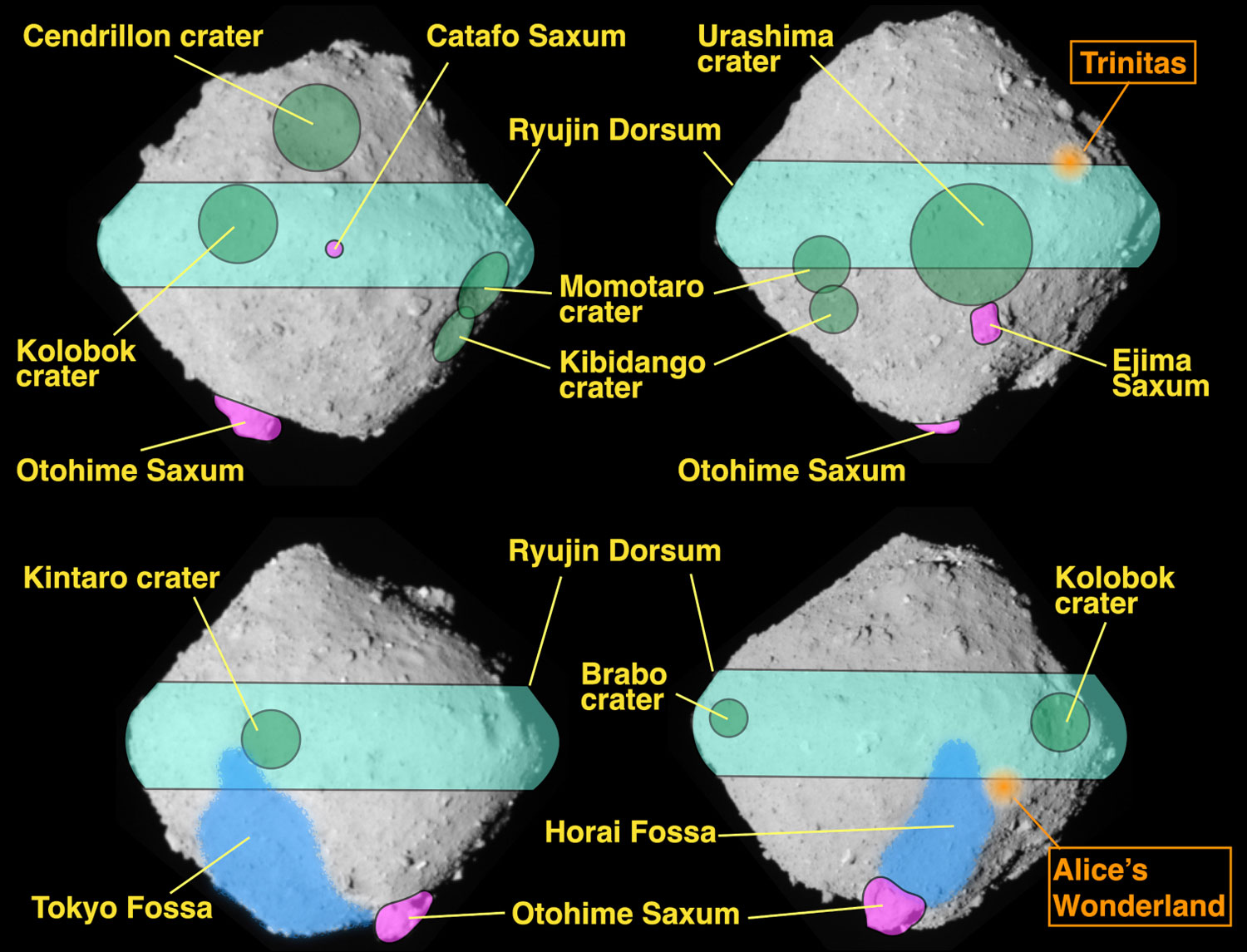
Cuando se descubre un asteroide se le pone un nombre provisional que indica el año en el que fue descubierto y el número de orden de los descubiertos ese año. Una vez que se hacen las suficientes observaciones de él como...

Confirmed Separation of the LSA on SEIS during mission sol 61. We can now look forward to deployment of the WTS and science @InSight_IPGP @InSight_IPGP @CNES @troyleehudson pic.twitter.com/yxVrtXID5v— Paul Hammond (@PaulHammond51) 28 de enero de 2019 Les ha costado casi cuatro semanas...

Despegue del segundo Larga Marcha 5 El fallo del segundo lanzamiento de un cohete Larga Marcha 5 el 2 de julio de 2017 supuso un serio revés para los planes más ambiciosos del programa espacial chino ya que es necesario tanto para...

Foto hecha durante la prueba - ESA/CNES Los cohetes Vega C y Ariane 6 de la Agencia Espacial Europea están otro paso más cerca de volar después de la segunda prueba con éxito del motor de combustible sólido P120C que utilizarán ambos...

Rodando una EMU - James Lemon Las Unidades de Movilidad Extravehicular, o EMU por sus siglas en inglés, son los trajes que se usan para los paseos espaciales correspondientes al segmento estadounidense de la Estación Espacial Internacional. Pero no hay uno hecho...
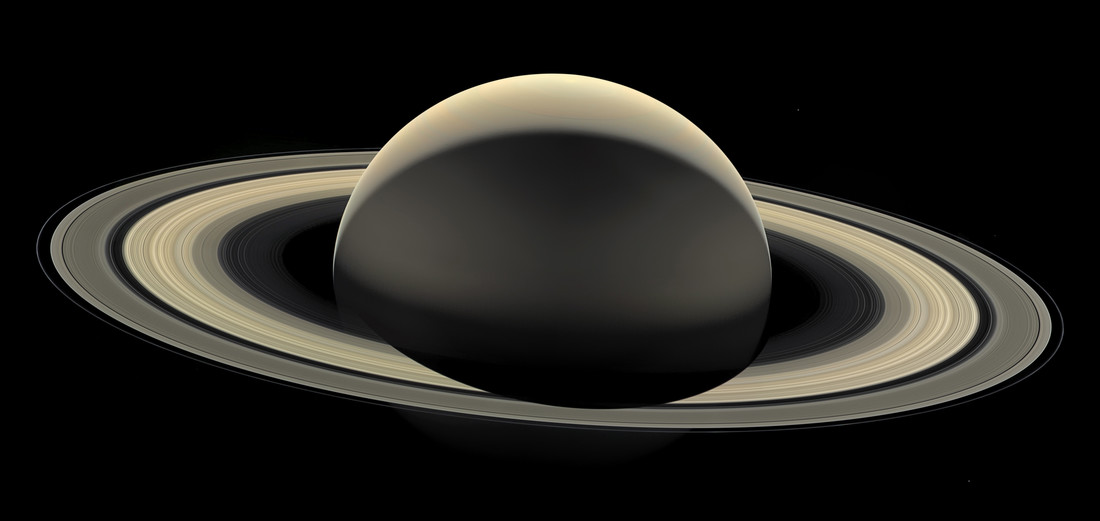
Saturno y sus anillos – NASA / JPL-Caltech / SSI / Ian Regan Me ha sorprendido descubrir de la mano de Phil Plait en su blog Bad Astronomy que acabemos de conocer el periodo de rotación de Saturno, es decir cuánto dura...

Este año, en el que se cumplen 50 años de nuestra llegada a la Luna, va a haber un montón de material nuevo para conmemorar ese momento histórico. Pero sin duda uno de los más espectaculares va a ser el documental...

La calidad del vídeo no es gran cosa pero creo que merece la pena verlo porque cuenta una historia que creo que es bastante desconocida: la de como dos profesores y un grupo de alumnos de la escuela de secundaria de...
Beresheet, el aterrizador con destino a la Luna diseñado por la empresa israelí SpaceIL, ya está en Florida, listo para ser integrado con el resto de las cargas con las que compartirá lanzamiento en un Falcon 9 en principio el próximo...
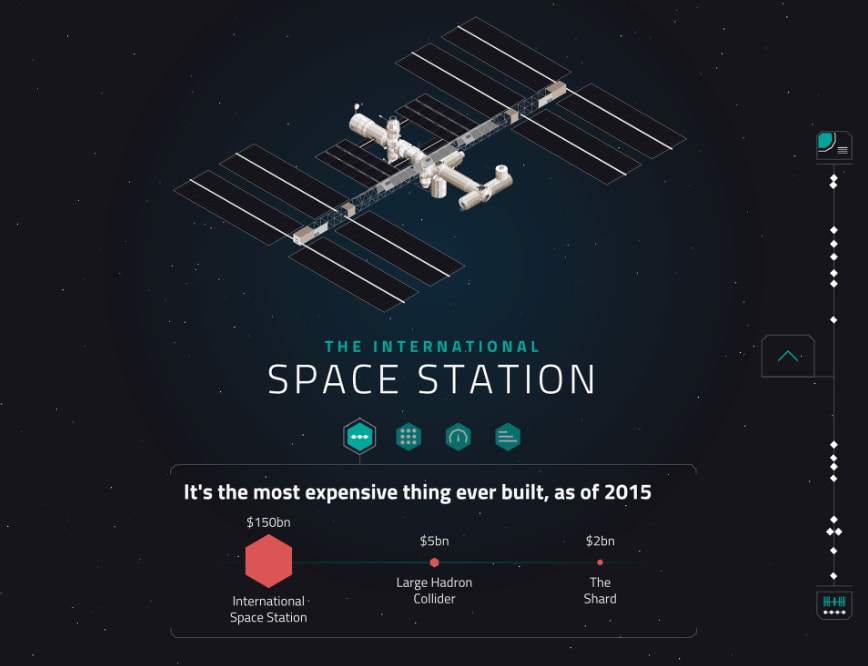
En BBC Future publicaron Interactive: How We Built the International Space Station, un espectacular interactivo dirigido por Tiziana Alocci de la agencia Beyond Words Studio. Tiene ya unos años pero sigue funcionando y es un estupendo homenaje lleno de datos sobre...
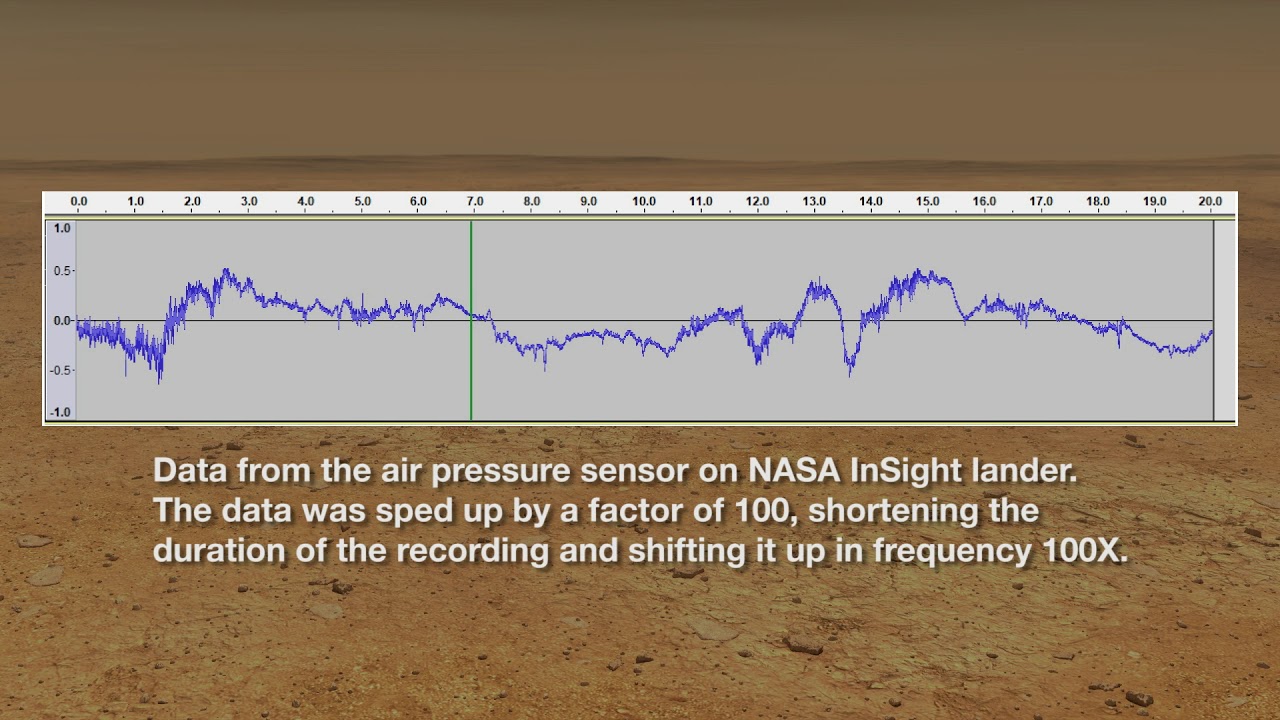
Una conversación con compañeros de trabajo acerca de sonificaciones me ha llevado a acordarme de que al final no había escrito nada sobre los sonidos que se supone que ha grabado la sonda Insight de la NASA en Marte Digo que...
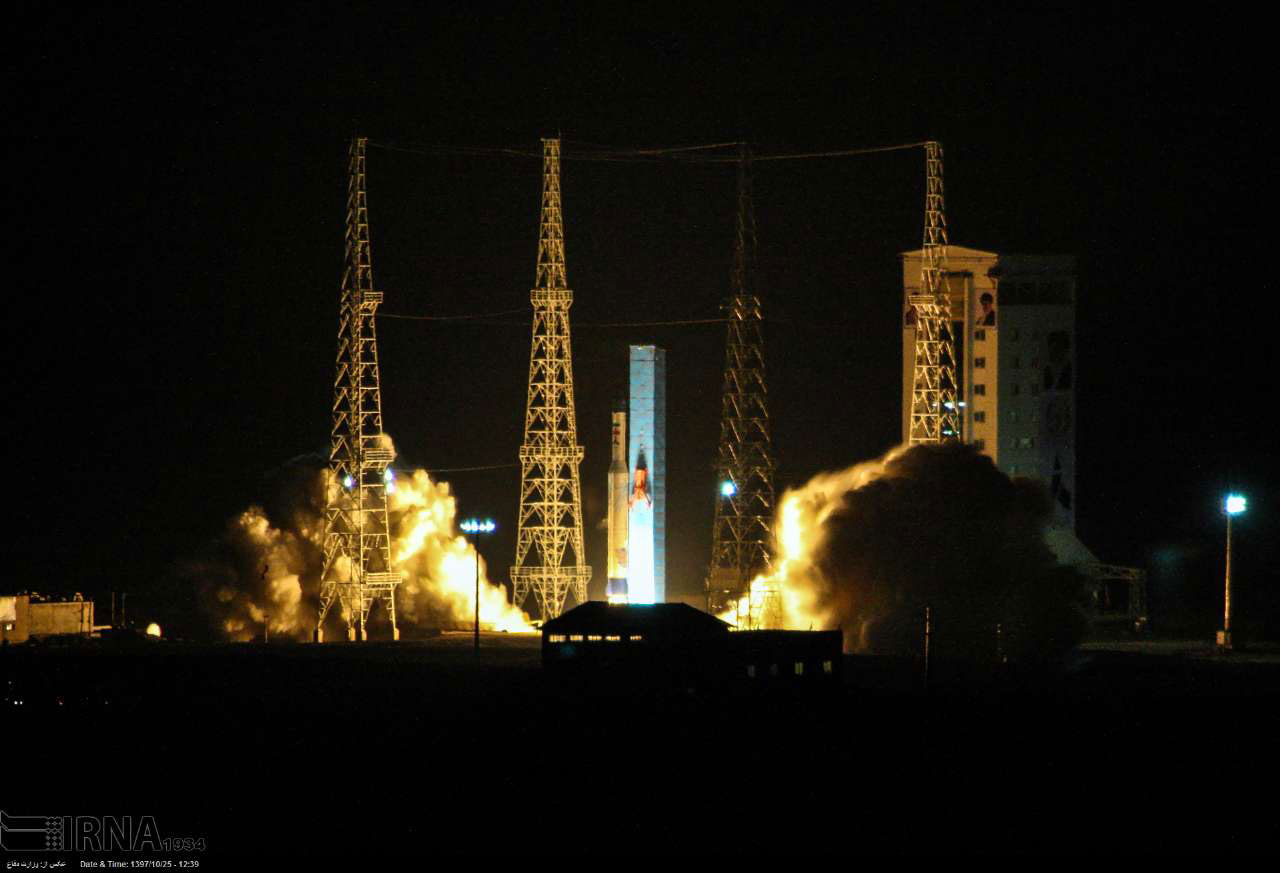
A mediados de enero de 2019 Irán intentó llevar a cabo el tercer lanzamiento de un cohete Simorgh, que habría sido el segundo con una carga útil real, pues el primero de los lanzamientos fue uno de prueba suborbital. E igual...
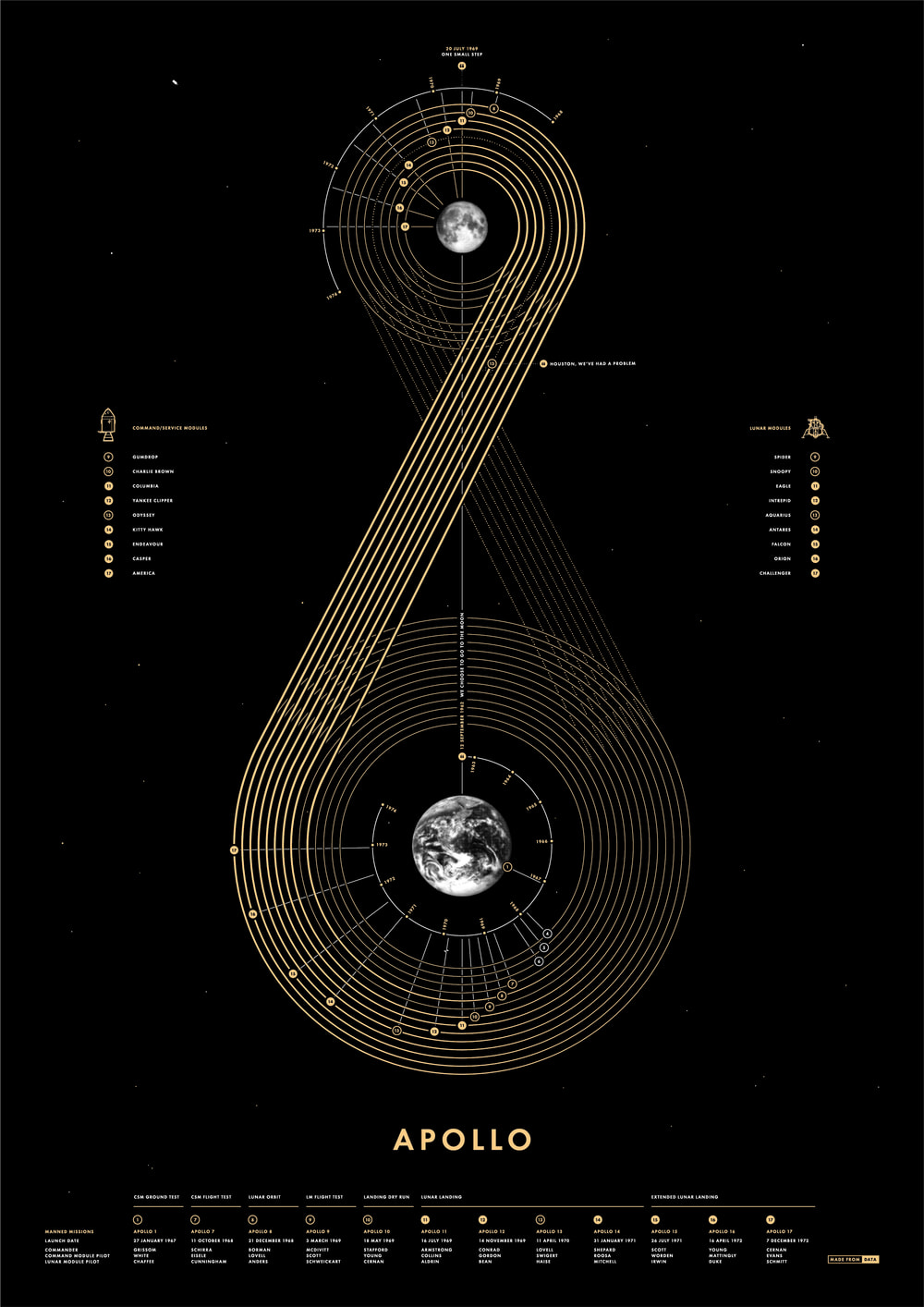
Este póster titulado Apollo Black es una pequeña maravilla obra del diseñador Paul Button. Es la segunda edición y contiene la historia en forma esquemática de todos los vuelos tripulados de las misiones Apolo. Las líneas indican las trayectorias, ascensos y...
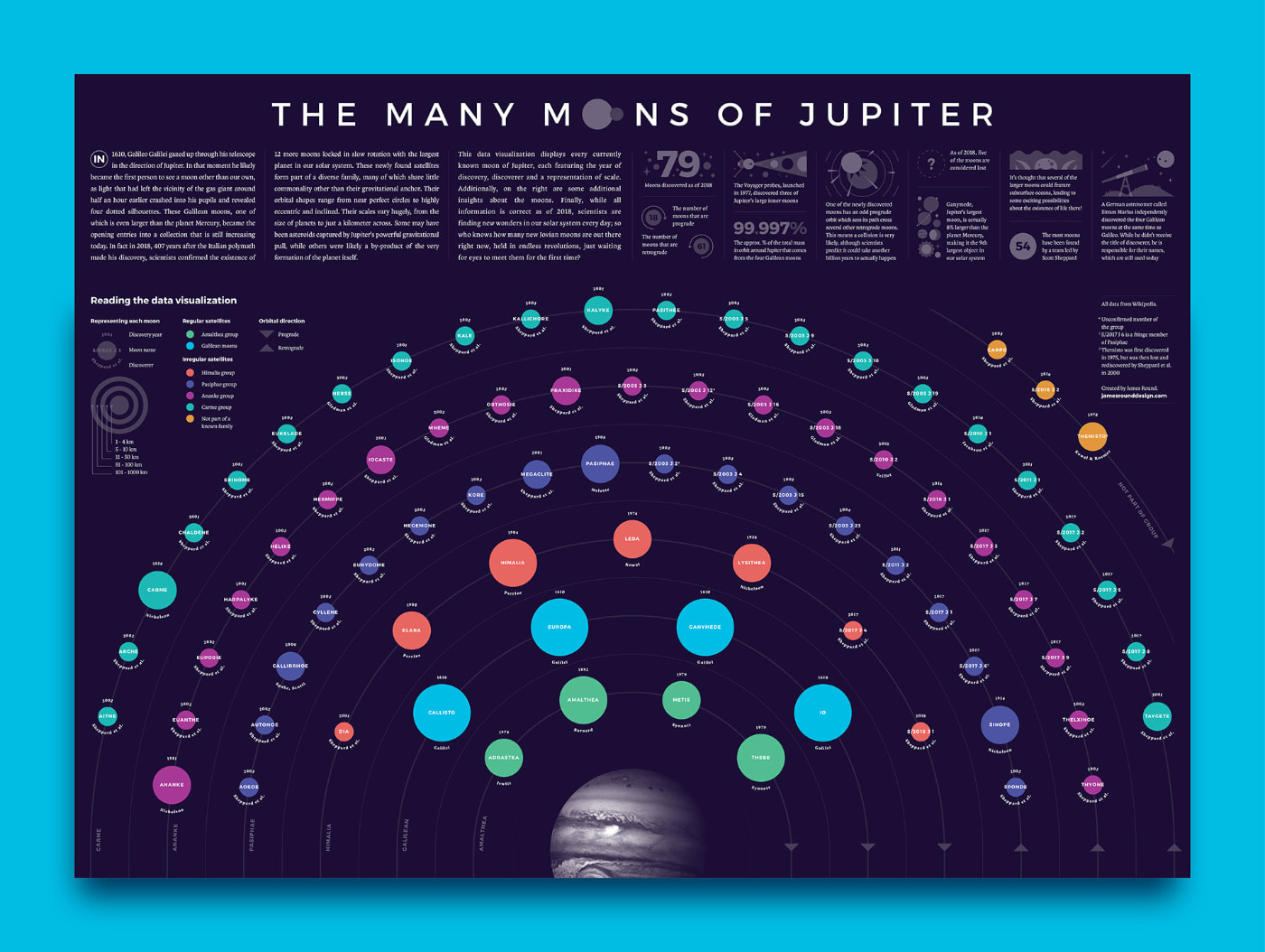
Ío, Europa, Ganimedes, Calisto, Amaltea… y ya no me sé más de memoria. Cuando yo era pequeño Júpiter tenía unas 9 o 10 lunas, y ya era difícil aprendérselas todas –por muy friki que fueras– pero es que hoy en día...
En 2014, años después de que la NASA hubiera dado por más que amortizada la señal de sonda ISEE-3, de International Sun-Earth Explorer-3, Explorador Internacional Sol-Tierra 3, volvía a ser escuchada desde la Tierra. Se sabía de los últimos contactos en...
Universe (1960) es un documental de Roman Kroitor y Colin que rodaron siendo parte de la segunda unidad de la National Film Board de Canadá. Ahora ha sido restaurado y está disponible en YouTube a buena calidad, con estupendo sonido y...

Después de permanecer atracada en la Estación Espacial Internacional durante 198 días, 15 horas y 44 minutos la cápsula de carga Progress MS-09 desatracaba del módulo Pirs a las 13:55, hora peninsular española, del 25 de enero de 2019. Como es...

NEW: #UltimaThule, now in higher-res! Both lobes now show many intriguing light & dark patterns of unknown origin, which may reveal clues about how it was assembled during the formation of the #solarsystem! @NASANewHorizons https://t.co/KK3T8ZFt3u pic.twitter.com/ULsF6atWUH— Johns Hopkins APL (@JHUAPL) 24 de...

Static fire test complete—targeting February launch from historic Launch Complex 39A for Crew Dragon’s first demonstration flight! pic.twitter.com/sJF24U3UOM— SpaceX (@SpaceX) 25 de enero de 2019 A las 22:00 del 24 de enero de 2018, hora peninsular española, SpaceX llevaba a cabo sin...
Además de los instrumentos de a bordo del aterrizador y del rover la misión Chang'e 4 a la cara oculta de la Luna llevaba consigo una especie de terrario para estudiar el crecimiento de ciertas plantas e insectos. Propuesto por estudiantes...
15 years ago #OTD, Opportunity landed on Mars: https://t.co/wkUohJdLYU pic.twitter.com/wYFtZ8vE2V— Spirit and Oppy (@MarsRovers) 24 de enero de 2019 El 25 de enero de 2004 a las 6:05, hora peninsular española, el rover Opportunity aterrizaba en Marte a tan sólo 25 kilómetros...
Apenas tres meses después de la muerte de Paul Allen, su fundador, Stratolaunch acaba de anunciar un significativo recorte en sus planes y el despido de 50 empleados. La empresa es conocida fundamentalmente por el peculiar avión Scaled Composites Model 351,...

Aplazado desde diciembre de 2018 por unos problemas con el equipo de tierra que hubo que solucionar el 23 de enero de 2019 Blue Origin llevaba a cabo el décimo lanzamiento de un cohete New Shepard con su cápsula diseñada para...

Impresión artística de una Starliner atracando en la EEI – NASA La NASA acaba de anunciar que por motivos de salud Eric Boe no podrá volar en la primera misión tripulada de una cápsula Starliner de Boeing y que por eso ha...

El 18 de enero de 2019 la Agencia Japonesa de Exploración Aeroespacial (JAXA) lanzaba su cuarto cohete Epsilon. Se trata de un cohete pensado para el lanzamiento de satélites científicos que, en su versión de cuatro etapas, es capaz de colocar...
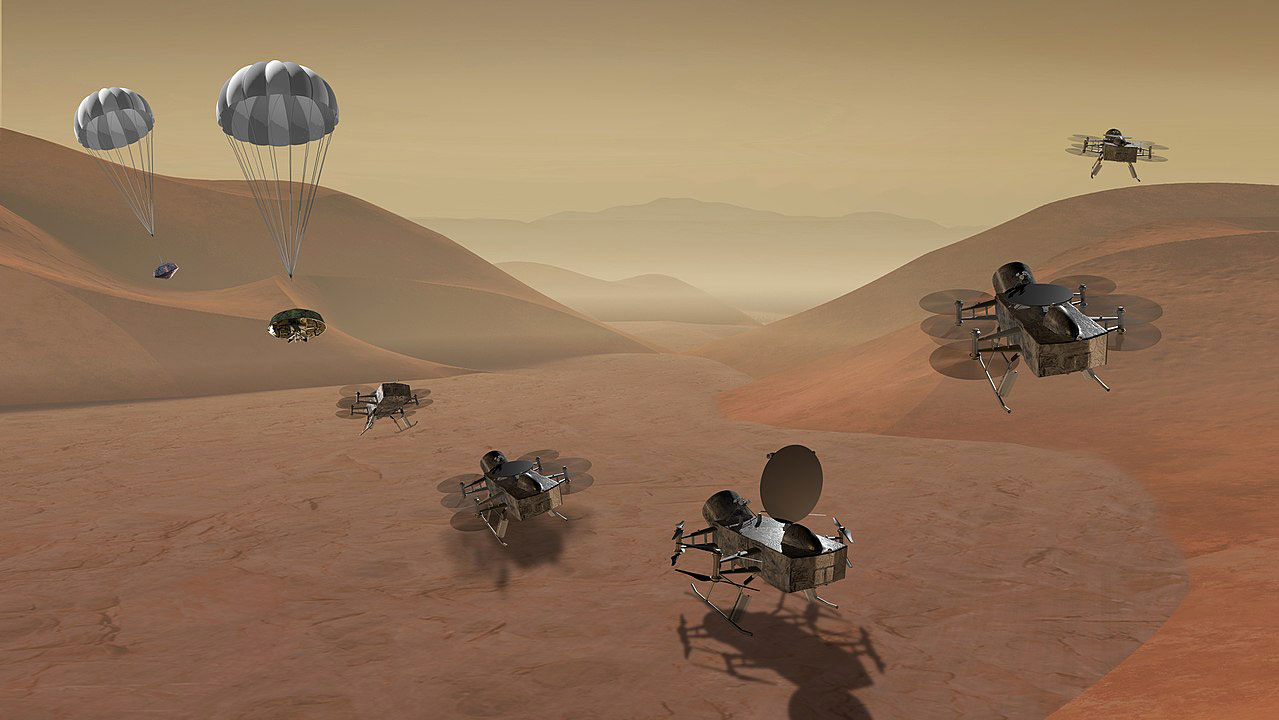
En 2016 la NASA solicitó nuevas propuestas de misiones para el programa New Frontiers, el mismo que nos ha dado la New Horizons, Juno u Osiris-Rex. De las 12 propuestas recibidas en abril de 2017 la agencia se ha quedado con...
Bruce W. Berry Jr ha creado este magnífico y relajante vídeo de vistas de la Tierra desde la Estación Espacial Internacional utilizando diversas técnicas interesantes para mejorar las imágenes. Lo ha combinado con música de Hans Zimmer (Journey to the Line)...
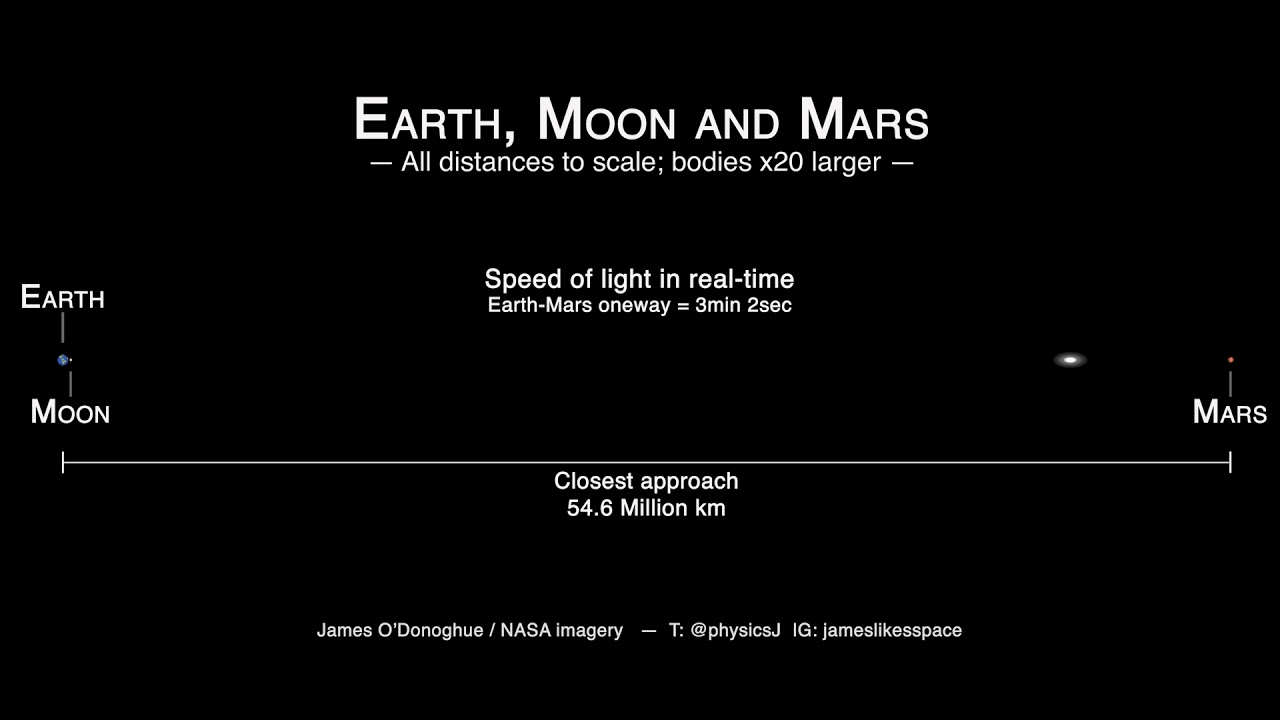
James O' Donoghue de la NASA ha preparado algunas animaciones a escala en las que se pueden apreciar las distancias y la velocidad de la luz cuando viaja entre tres objetos celestes: la Tierra, la Luna y Marte. En la primera...
Este vídeo que reconstruye el fallo del lanzamiento de la cápsula tripulada Soyuz MS-10 tiene ya unos meses pero no lo había visto antes. Y me parece impresionante. No sólo porque permite ver desde distintos ángulos el accidente sino porque fue...

El 16 de enero de 1969 a las 9:20, hora peninsular española, las cápsulas tripuladas Soyuz 4 y Soyuz 5 se acoplaban en el espacio, convirtiéndose en las dos primeras naves espaciales de la historia en llevar a cabo tal maniobra....

Bob Benkhen y Doug Hurley son los dos astronautas de la NASA que, si todo va según lo previsto, serán los primeros en despegar en una nave tripulada estadounidense desde la retirada de los transbordadores espaciales de la agencia en 2011....

Con unos días de retraso respecto a la fecha planeada inicialmente la cápsula de carga Dragon CRS 16 terminaba su misión con un amerizaje frente a la costa de Baja California a las 6:10 del 14 de enero de 2018. El...

Tras superar sin problemas la conjunción con el Sol que hizo que durante aproximadamente un mes la sonda Hayabusa 2 estuviera in poder comunicarse con el control de la misión ya tenemos fecha para la primera de las tres tomas de...
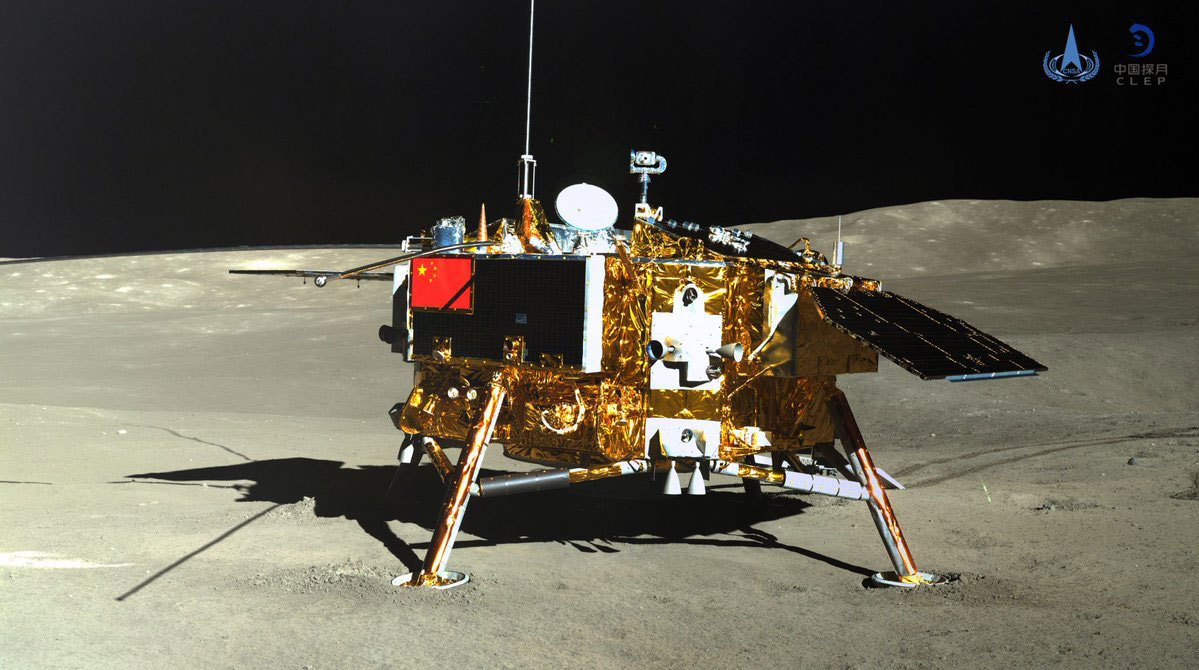
Depués de que tanto el aterrizador como el rover hayan sobrevivido a su primer mediodía en la cara oculta de la Luna, durante el que las temperaturas pueden alcanzar los 200 ºC, las autoridades chinas han declarado la misión Chang'e 4...

Tal y como estaba previsto a las 16:31, hora peninsular española, del 11 de enero de 2018 un Falcon 9 bloque 5 despegaba del Complejo de lanzamiento 4E de la Base de la Fuerza Aérea de Vandenberg en California para poner...

Todo está preparado en el Complejo de lanzamiento 4E de la Base de la Fuerza Aérea de Vandenberg en California para que SpaceX lleve a cabo su primer lanzamiento de 2019. Pondrá en órbita 10 satélites de telecomunicaciones Iridium NEXT. Y...
![imagen]()
Después de hacer el último lanzamiento espacial de 2018 China está preparada para hacer el primero de 2019, ganándole por un poco menos de un día a SpaceX. Se trata de poner en órbita el satélite de telecomunicaciones –se cree que...

Yutu 2 en la superficie de la Luna - Programa de exploración lunar chino Poco se ha sabido del rover Yutu 2 desde que el mismo día de la llegada de la misión Chang'e 4 a la cara oculta de la Luna...

El 27 de febrero de 2013 –200 días marcianos después de haber llegado a Marte– el ordenador A del rover Curiosity falló. Pero la misión pudo seguir adelante porque el vehículo dispone de dos ordenadores gemelos precisamente por si falla uno...

El 9 de enero de 1969 la NASA hacía públicos los nombres de la tripulación principal de la misión Apolo 11, la que estaba previsto que permitiera a la humanidad poner pie por primera vez en la Luna. Se trataba –de...

La muchachada de Rebricolous construyó el Saturno V de Lego (1969 piezas, ahí es nada) y buscaron a unos especialistas en cohetería para lanzarlo a las alturas, y a ver hasta dónde llegaba. Es una versión a escala bastante completa, con...
En septiembre de 1998 Víctor Ruiz se embarcó en la aventura de publicar Astronomía Digital, una revista de difusión libre. Astronomía Digital se convertía así en la primera publicación electrónica de distribución gratuita en español orientada a la astronomía aficionada. Víctor iba...

Le boitier où mon cordon ombilical était enroulé (TSB) est désormais totalement ouvert. Un peu moins d'un mètre supplémentaire de câble a été libéré, ce qui va améliorer son contact avec le sol martien, et diminuer le niveau de perturbations associées.https://t.co/btEhZrbZE6 pic.twitter.com/WCzh0M1oVQ—...
Spirit aterrizando en Marte protegido por sus airbags – NASA/JPL A las 5:35, hora peninsular española, del 4 de enero de 2004, el rover MER-A de la NASA, mucho más conocido como Spirit, aterrizaba en el cráter Gusev de Marte. Su gemelo...

Preparing to return human spaceflight capabilities to the United States, Crew Dragon and Falcon 9 went vertical at historic Launch Complex 39A in Florida. pic.twitter.com/igggZdCU9k— SpaceX (@SpaceX) 5 de enero de 2019 El primero en capturar imágenes del Falcon 9 bloque 5...

Yutu 2 en la superficie de la Luna - Programa de exploración lunar chino Poco se lo han pensado los responsables de la misión Chang'e 4 para sacar a pasear el rover: si el aterrizador se posaba en la cara oculta de...
Ultima Thule en rotación - NASA/JHUAPL/SwRI El equipo de la New Horizons ha dado hoy una nueva rueda de prensa en la que contaron alguna cosa más que han podido averiguar de un primer análisis de los datos que ya han recibido...

[Banda sonora recomendada para esta anotación: The Dark Side of the Moon de Pink Floyd, por supuesto] Menos de 48 horas después de que hayamos visitado el astro más lejano al que jamás hayamos llegado acabamos de alcanzar otro sitio en...
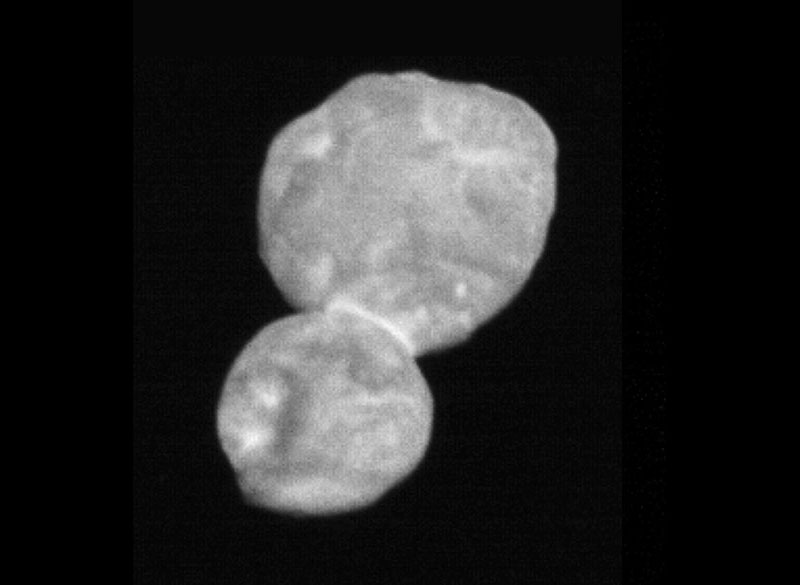
Impresión artística de New Horizons en Ultima Thule – NASA/JHUAPL/SwRI/Steve Gribben Desde primeras horas de la tarde del día 1 de enero de 2019, hora peninsular española, sabíamos que la sonda New Horizons de la NASA había superado sin problemas a su...
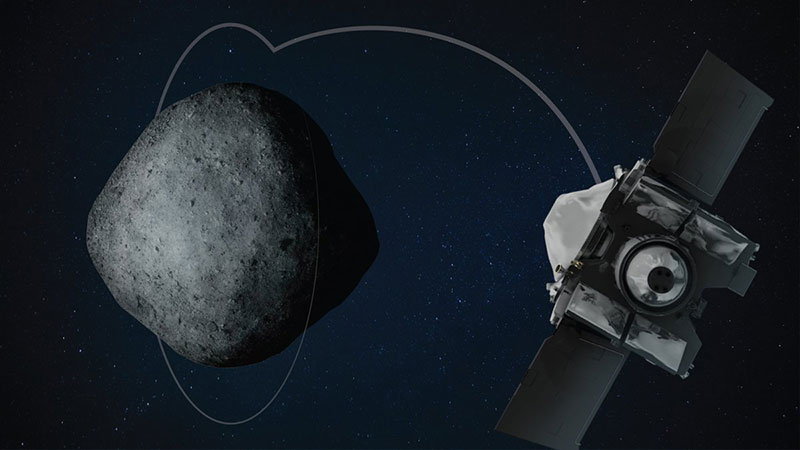
El equipo de la misión Osiris-REX de la NASA terminaba bien 2018 al conseguir colocar sin problemas su sonda en órbita alrededor del asteroide Bennu a últimas horas del 31 de diciembre. Y es que aparte del problema de tener que...

Me ha encantado Les plus beaux lancements de 2018, una recopilación de algunos de los 114 lanzamientos orbitales de 2018 –más alguno no orbital– montada al ritmo de Butterflies and Hurricanes de Muse. No especifica cual es cual en cada momento,...

For folks at the New Horizon flyby New Year’s Eve, I’m bringing posters! #UltimaFlyby #Pluto @LokiVolcano @AlanStern pic.twitter.com/gOXMo3MOHZ— Tyler Nordgren (@NightSkyPark) 28 de diciembre de 2018 Mientras esperamos a que la misión Chang'e 4 a la cara oculta de la Luna aterrice,...

Según el Programa Chino de Exploración Lunar la sonda china Chang'e 4 ha ajustado su órbita alrededor de la Luna ayer mismo, pasando de una órbita circular de 100 kilómetros a una de 15×100 kilómetros. También informan de que no sólo...
Big milestone coming up! On #NYE19,when I go into orbit around Bennu, I'll break two records: the smallest body ever orbited by a spacecraft and the closest orbit of a planetary body by any spacecraft.For updates, follow @UALPL and keep an eye...

ℹ:https://t.co/BCRXMQb33Z pic.twitter.com/zmKWLriIKZ— LaunchStuff (@LaunchStuff) 29 de diciembre de 2018 Un cohete Larga Marcha-2D/YZ-3 que despegó a las 9:00, hora peninsular española, con el satélite Hongyan-1 a bordo, ha sido el último lanzamiento orbital de 2018. Ha sido el lanzamiento número 39 para...
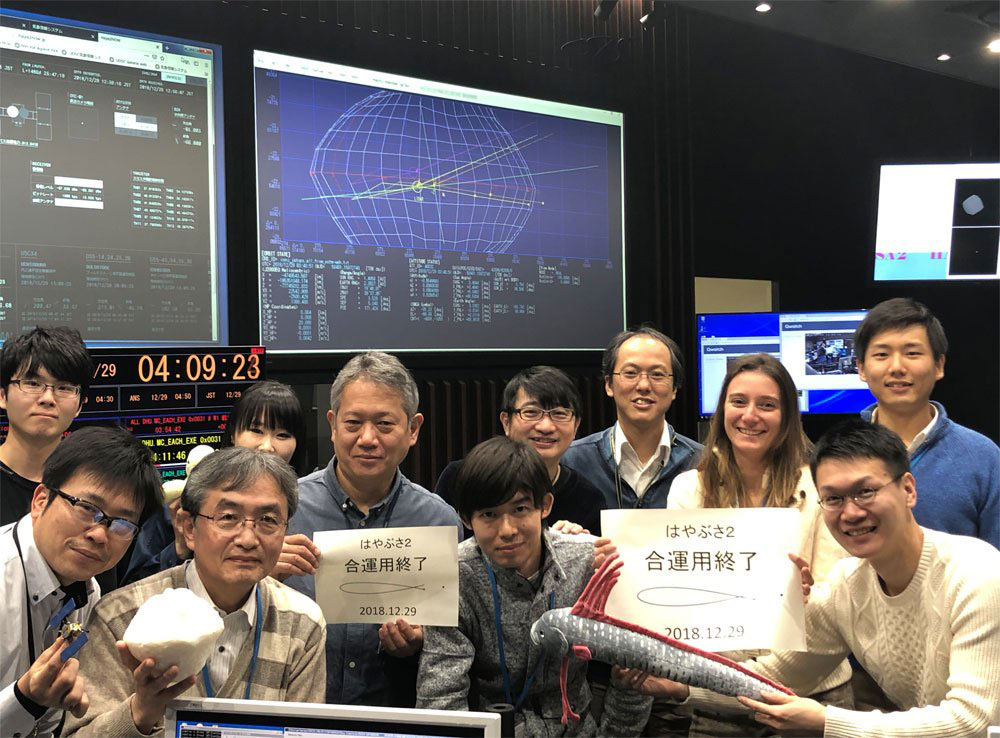
This photo commemorates the end of the solar conjunction operation! There was a final operation report from Stefania, in charge of solar conjunction orbital planning and the result? Buon anno! But of course, the spacecraft operation will continue through the year. pic.twitter.com/2ez0QHld8I—...

Stainless Steel Starship pic.twitter.com/rRoiEKKrYc— Elon Musk (@elonmusk) 24 de diciembre de 2018 Después de insinuar vía Twitter cambios en el diseño del BFS, la etapa superior del próximo gran cohete de SpaceX, Elon Musk ha tuiteado una foto en la que se...

Cuando vemos la Tierra desde el espacio nos vemos a nosotros mismos como un todo… Vemos la unidad, no las divisiones. Un planeta, una raza humana.– Stephen Hawking Hoy se cumplen 50 años desde que William Anders tomara una de las...

More photos from today’s Falcon 9 launch; SpaceX’s 21st mission of 2018 → https://t.co/095WHX44BX pic.twitter.com/jGyc53PDWO— SpaceX (@SpaceX) 24 de diciembre de 2018 Entre meteorología adversa y problemas técnicos ha habido que esperar al quinto intento para que SpaceX pusiera en órbita el...

In case you missed it, here’s one for the history books: for the first time ever, I’ve placed a seismometer on the surface of #Mars! Once it’s all set up, I can start listening for marsquakes. More: https://t.co/GYNO4txPPi pic.twitter.com/vUkedVMcTX— NASA InSight (@NASAInSight)...

Hasta la noche del 30 de agosto de 2018 la misión de la cápsula tripulada Soyuz MS-09 estaba siendo absolutamente normal. Pero esa noche saltó una alarma de pérdida de aire en la Estación Espacial Internacional, a la que estaba acoplada,...

On Thursday, Sergey, @AstroSerena and I will hitch a lift on this satellite, coming back home as a shooting star. I will miss this place! #Horizons #Exp57 #ISS #SoyuzMS09 pic.twitter.com/91lsW5dJuC— Alexander Gerst (@Astro_Alex) 18 de diciembre de 2018 Todo está preparado para...

The sun is rising over the #DeltaIVHeavy with #NROL71 on the launch pad this morning. Liftoff planned for today, Dec. 18 at 5:57pm PST @NatReconOfc @30thSpaceWing https://t.co/wLoggeC9CA pic.twitter.com/CaMGLYAAhS— ULA (@ulalaunch) 18 de diciembre de 2018 Vientos demasiado fuertes en cotas altas, un...

El proyecto IllustrisTNG genera simulaciones cosmológicas de la formación de galaxias, algo que denominan simulaciones magnetohidrodinámicas, con la idea de arrojar algo de luz a los procesos mediante los que se crean y evolucionan estas estructuras en el universo. En su...

Tomorrow is the 4th mission for this launch vehicle and the 10th mission overall for the #NewShepard program #NS10 #LaunchLandRepeat pic.twitter.com/xvAjtT53FM— Blue Origin (@blueorigin) 17 de diciembre de 2018 En 2018 rara es la semana en la que los espaciotrastornados no tenemos...

Lift-off from Rocket Lab Launch Complex 1 for the @NASA #ELaNa19 mission. Rapid and reliable launch for small satellites is here. #TheWaitIsOver pic.twitter.com/2myJsyb2GN— Rocket Lab (@RocketLab) 16 de diciembre de 2018 Con unos días de retraso debido a que la meteorología no...
SpaceShipTwo looking back on Spaceship Earth pic.twitter.com/ynr31mKzzf— Virgin Galactic (@virgingalactic) 13 de diciembre de 2018 Tal y como estaba previsto el cuarto vuelo propulsado del VSS Unity de Virgin Galactic fue en el que más tiempo se mantuvo el motor encendido hasta...

The window for our 4th powered test flight opens on Thursday. We plan to burn the rocket motor for longer than we have in flight before, but not to its full duration. Some background on this next phase of our test flight...

We are green for tomorrow's #ELaNa19 launch on Electron. The launch window opens at 04:07 UTC (17:07 NZDT/20:07 PST/23:07 EST). We're currently tracking a moderate risk of weather violation due to thunderstorms, so stay tuned for updates tomorrow. pic.twitter.com/UWb9VHGnMK— Rocket Lab (@RocketLab)...

Los paseos espaciales en la Estación Espacial Internacional se dividen en dos tipos básicos, los programados y los de contingencia. Los primeros son los que se sabe que van a ser necesarios porque hay que instalar o cambiar un componente en...
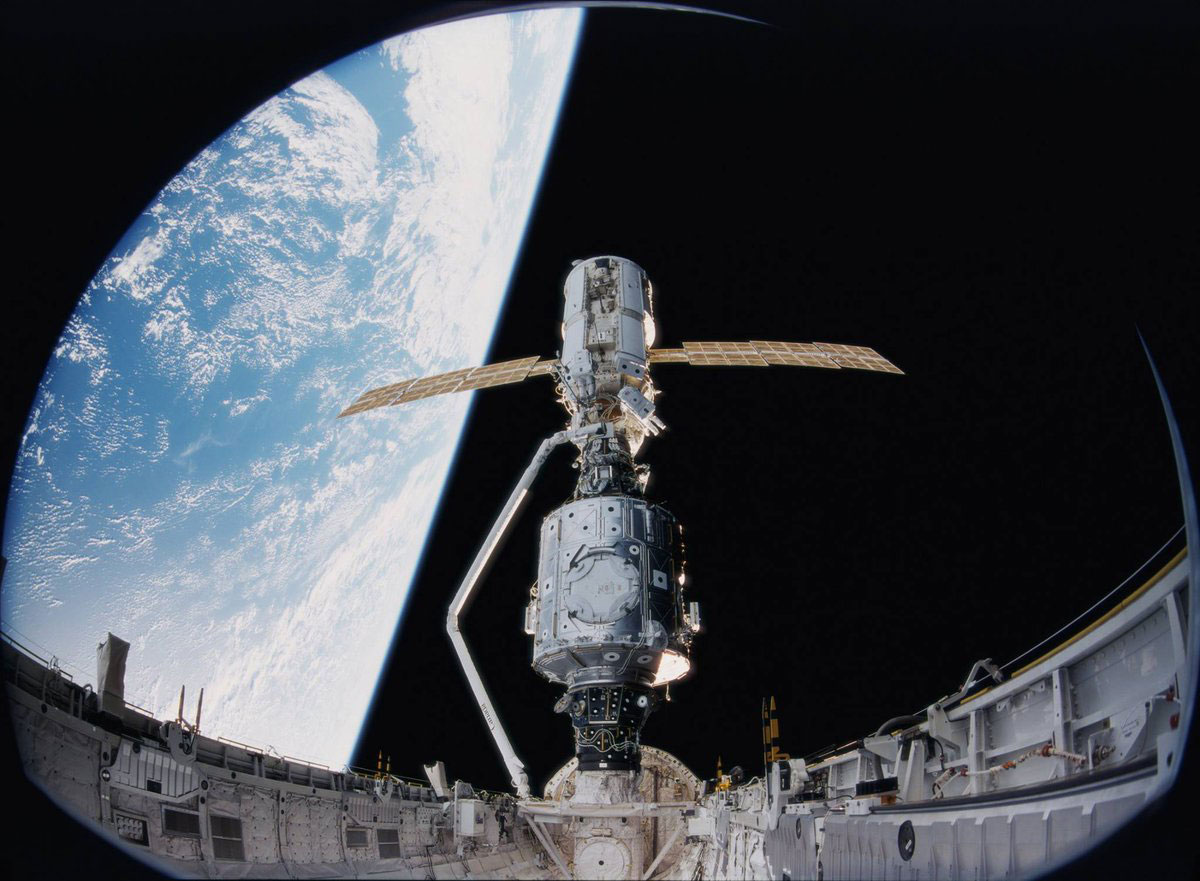
El 10 de diciembre de 1998, tras haber encajado el módulo Zarya, que llevaba desde el 20 de noviembre en órbita, con el módulo Unity, que había viajado al espacio en la bodega de carga del transbordador espacial Endeavor, y tras...
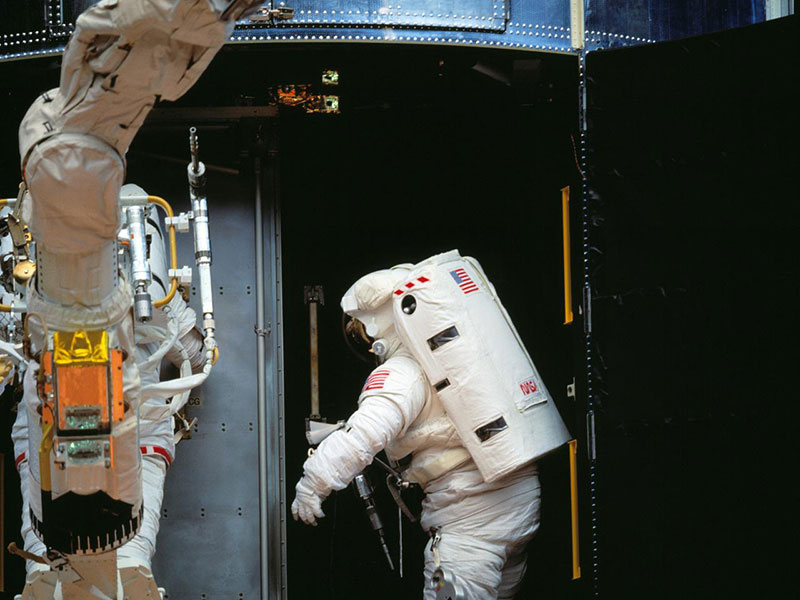
A las 4:13 del 8 de diciembre de 1993, hora peninsular española, comenzaba uno de los paseos espaciales más importantes para la historia de la astronomía, el cuarto de la primera misión de mantenimiento del Telescopio espacial Hubble. El objetivo era...
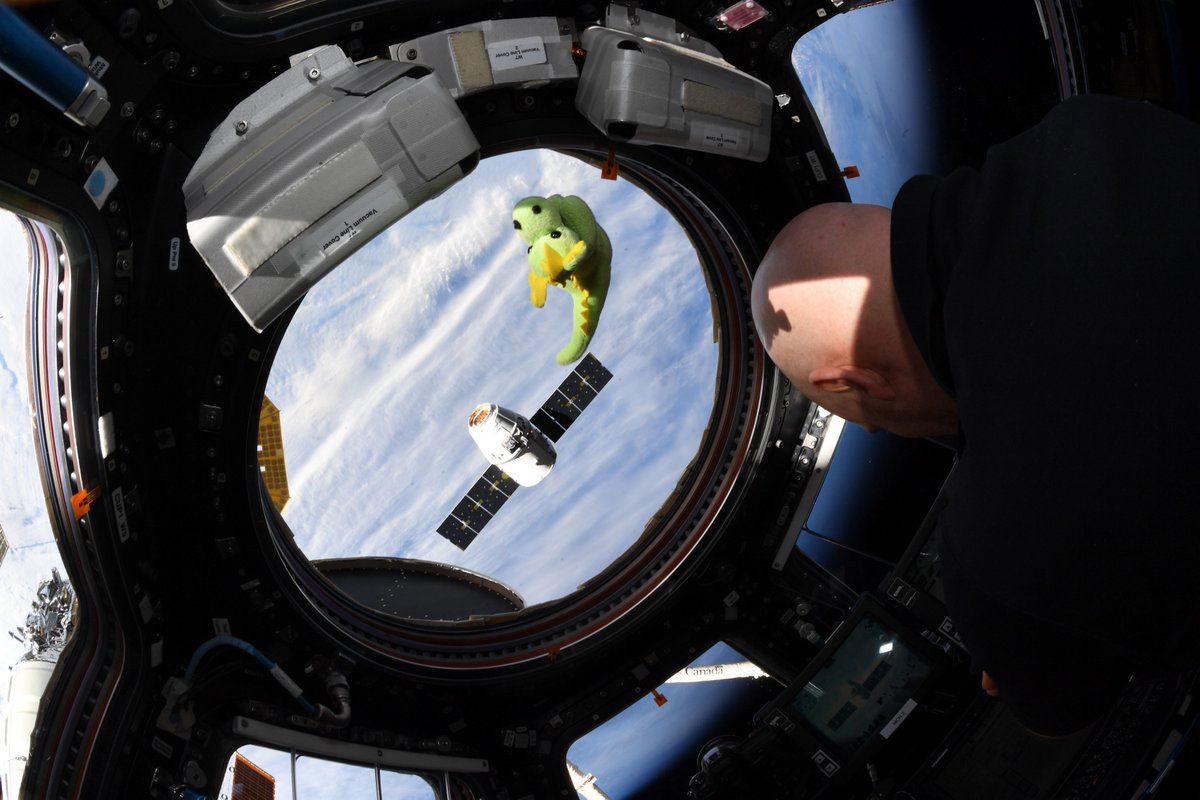
The number of Dragons on @Space_Station just doubled! Congratulations to @SpaceX on a successful launch, and to all the teams across the world who enable such amazing feats! pic.twitter.com/f78w8QzYEX— Anne McClain (@AstroAnnimal) 8 de diciembre de 2018 Con un pequeño retraso sobre...
A nice 100-second video of Chang'e-4 lunar mission preparations, ignition, launch, and staging. Source: https://t.co/nvvUL1ypdj pic.twitter.com/FS4FDYOLyJ— Andrew Jones (@AJ_FI) 8 de diciembre de 2018 Un cohete Larga Marcha 3B/E despegaba a las 19:23 del 7 de diciembre de 2018, hora peninsular española,...
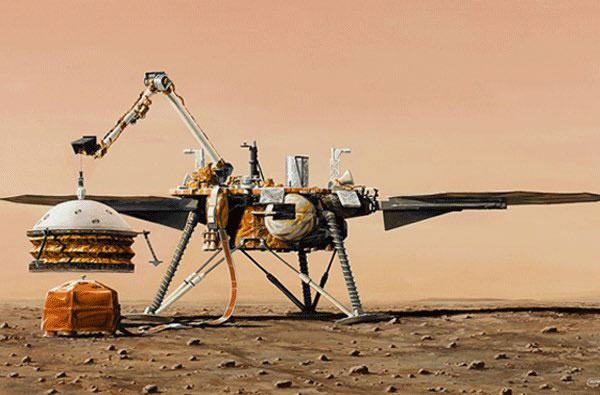
El Centro Nacional de Estudios Espaciales (CNES), responsable principal del sismógrafo del aterrizador InSight de la NASA, ha confirmado que las pruebas iniciales confirman que tras el lanzamiento, el viaje y al aterrizaje de la misión el instrumento está en perfectas...

Las Mercury 13 fueron un grupo de mujeres que a principios de la década de los 60 del siglo XX se sometieron a un entrenamiento similar al de los astronautas de la NASA porque ellas también querían ser astronautas. Pero ni...

After a week of meticulous testing, @BepiColombo's thrusters are up and running. The most powerful and high-performance electric propulsion system ever flown will propel the joint ESA/@JAXA_en spacecraft on the seven-year journey to Mercury. Read more: https://t.co/QgHuk4YhnN pic.twitter.com/lTMt9PbSpP— ESA (@esa) 5 de...

Lanzamiento – SpaceX Tras un lanzamiento perfecto la cápsula de carga Dragon CRS 16 viaja rumbo a la Estación Espacial Internacional con bordo 2.573 kilos de experimentos, provisiones para la tripulación, incluyendo algún detallito navideño, y componentes a bordo. Su llegada a...

Las buenas noticias son que es bastante improbable que algún objeto del espacio exterior impacte contra la Tierra. Así que estamos seguros. Por ahora.– Gema Parreño Gema Parreño protagoniza este vídeo de Google en el que explica que se dedica a...

Un cohete Ariane 5 ECA fue el encargado de poner en órbita de transferencia geoestacionaria el satélite indio de telecomunicaciones GSAT-11 y el satélite meteorológico surcoreano KOMPSAT-2A. El despegue se produjo a las 21:37, hora peninsular española, la separación del GSAT-11...

Junto a las otras 62 cargas útiles más convencionales la misión SSO-A de Spaceflight puso en órbita dos obras de arte, Enoch y Orbital Reflector. Enoch, diseñada por Tavares Strachan en colaboración con el Museo de Arte del Condado de Los...

Me on my way to delay CRS-16 pic.twitter.com/hOtVILXxfY— Moldy Mouse Food (@MoldyMouseFood) 4 de diciembre de 2018 Unas barritas de alimento contaminadas con moho para los 40 ratones que van a viajar a bordo, que han tenido que ser cambiadas a última...

This Falcon 9 rocket booster completed its third launch and landing in six months. Every flight and reflight allows us to validate the rocket’s performance against predictions and maximize reliability on future flights. pic.twitter.com/Vi2awpQg2L— SpaceX (@SpaceX) 5 de diciembre de 2018 SpaceX...

Congratulations to the Russian Space Agency @roscosmos and all international partners for a flawless launch of #SoyuzMS11. And welcome to space, @Astro_DavidS, @AstroAnnimal and Oleg! #Exp57 #Exp58 #Horizons pic.twitter.com/rzEjtm2PcO— Alexander Gerst (@Astro_Alex) 3 de diciembre de 2018 Por mucho que después del...
Después de algo más de dos años y dos meses de viaje la sonda Osiris-REX de la NASA ha igualado su órbita con la del asteroide Bennu, que es el destino de la misión. En los próximos días la sonda sobrevolará...
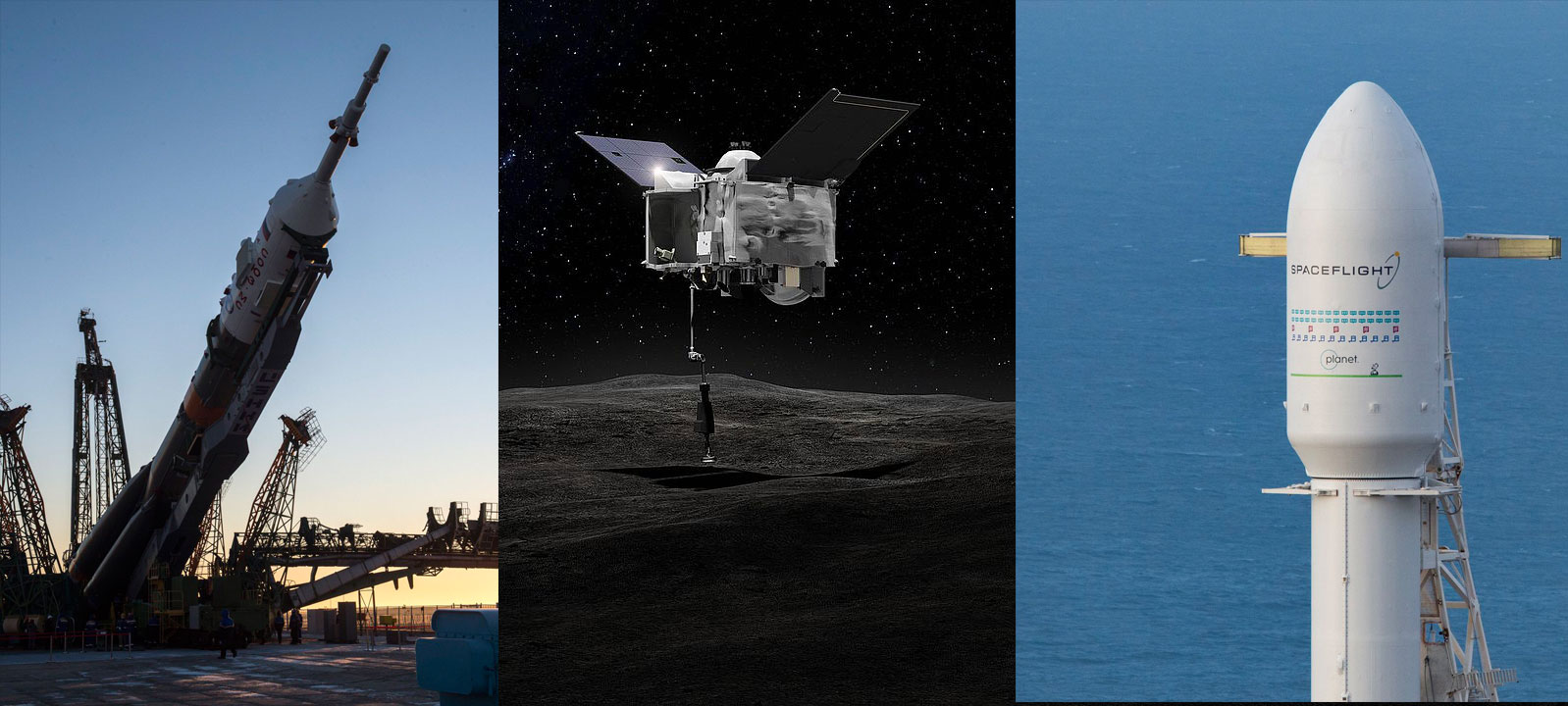
Por cosas de mecánicas orbitales, cohetes que fallan en su lanzamiento, meteorología adversa y por pura chiripa el lunes 3 de diciembre de 2018 es de mucho espaciotrastorno. Y es que si todo va según lo previsto –algo que como bien sabemos...

Stunning light at remote camera set up for tomorrow’s @SpaceX & @SpaceflightInc SSO-A launch this evening. Just look at all the beautiful soot on this twice-used Falcon 9! @NASASpaceflight @elonmusk pic.twitter.com/zAhr3NIM8G— Jack Beyer (@thejackbeyer) 2 de diciembre de 2018 Una vez que...

Después de que la tripulación principal y la de respaldo completaran sus últimos ensayos de lanzamiento durante el 29 de noviembre de 2018 la agencia espacial rusa, Roscosmos, ha terminado el ensamblado del cohete Soyuz FG que debe poner en órbita...

El primer módulo de servicio de una cápsula Orión, fabricado por la Agencia Espacial Europea, llegó a al centro el pasado día 5 de noviembre. Tras ser sometido a las pruebas pertinentes los técnicos de la NASA del Centro espacial Kennedy...
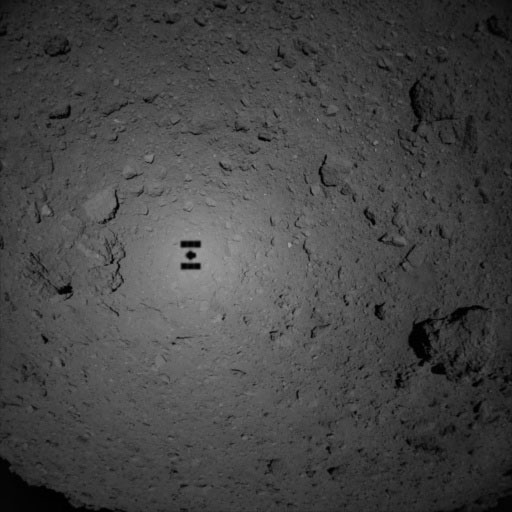
La órbita de Ryugu, el asteroide que está estudiando la sonda Hayabusa 2 de la Agencia Japonesa de Exploración Aeroespacial (JAXA) está a punto de colocarlo al otro lado del Sol desde el punto de vista de la Tierra. Esto es...
Después de varios meses de trabajo con la Agencia Espacial Europea, con la que colabora en el desarrollo de lanzadores para microsatélites, la empresa española PLD Space ha decidido que su cohete orbital Miura 5 va a ser más grande de...

En una rueda de prensa en la que ha habido más bien poca información concreta la NASA ha anunciado el nombre de las nueve empresas que ha escogido –de las 31 que se presentaron– para que puedan participar en el programa...

The model of the Iran's manned spaceship on display at Kish air show. It would carry a single astronaut to a 175 km height and return to Earth. first real flight with #astronaut probably will be in 2021.#IranAirShow pic.twitter.com/DixiuK4uts— Hani (哈尼) (@hanipersian)...
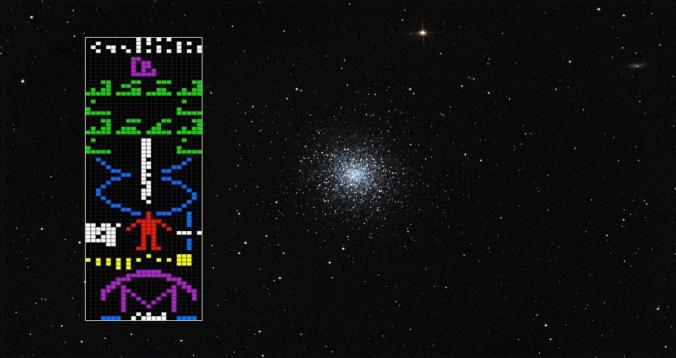
En el emblemático radiotelescopio de Arecibo (Puerto Rico) han planificado una nueva actividad didáctica para concienciar sobre las dificultades y posibilidades de las comunicaciones interestelares con inteligencias extraterrestres y los riesgos que ello podría conllevar. Es un concurso a nivel internacional...

Vandenberg Air Force Base SLC-4 looked great yesterday, Nov. 26, from the orbit of #DEIMOS2! Good luck @SpaceX for tomorrow's launch! #KazSTSAT #Falcon9 pic.twitter.com/q2NmKv3k0c— Deimos Imaging (@deimosimaging) 27 de noviembre de 2018 El Complejo de lanzamiento 4 de la Base de la...

Tras un retraso de más de una semana para hacer unas revisiones extra al cohete SpaceX está lista para lanzar la misión SSO-A de Spaceflight Industries desde el Complejo de lanzamiento 4E de la Base de la Fuerza Aérea de Vandenberg en...
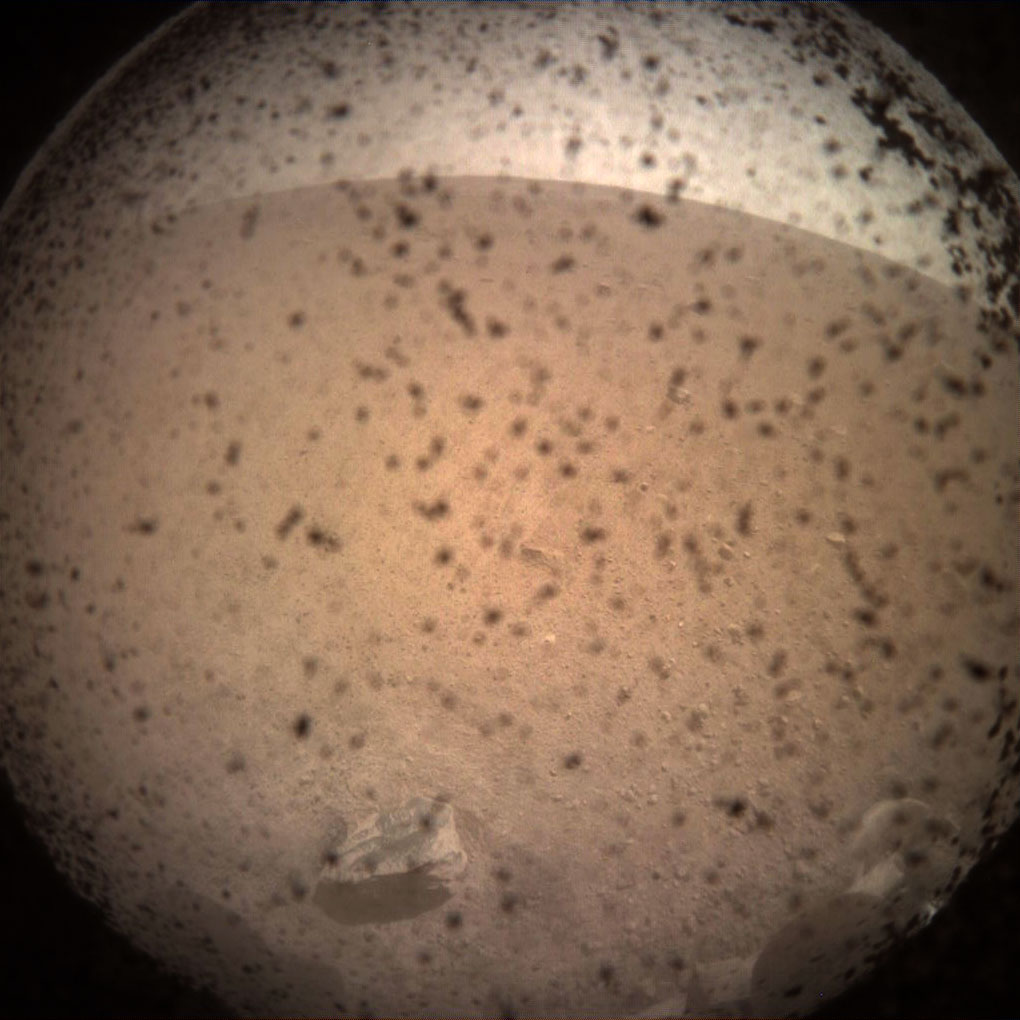
No es gran cosa porque está hecha a través de la cubierta del objetivo –que está cubierta de polvo– de la cámara de contexto de la sonda InSight de la NASA pero la de arriba es la primera imagen que tomó,...

A las 20:40, hora peninsular española, del lunes 26 de noviembre de 2018 la sonda InSight se separará del módulo de transporte que le ha servido de guía en los 205 días que les ha llevado llegar hasta Marte. Tendrá siete...

Para conmemorar el 20º aniversario del lanzamiento del primer módulo de la Estación Espacial Internacional el astronauta Alexander Gerst ha creado Space Station 20th: longest continuous timelapse from space. Es un timelapse que recoge dos órbitas alrededor de la Tierra de...

Progress launch timelapse seen from space es un vídeo creado a partir de fotografías del lanzamiento de la cápsula de carga Progress MS-10 tomadas por Alexander Gerst desde la Estación Espacial Internacional. La Progress es fácil de seguir porque es la...

2019 viene con un interesante regalo de Reyes para los espaciotrastornados, aunque con un poquito de retraso: la NASA acaba de anunciar que la primera misión de prueba de una Crew Dragon despegará el 7 de enero de 2019. Conocida como...

Para conmemorar el vigésimo aniversario del lanzamiento de Zarya la agencia espacial rusa Roscosmos ha publicado un vídeo llamado The star named ISS, La estrella llamada EEI, que mola todo porque tiene un montón de imágenes inéditas. Aunque los subtítulos incrustados...
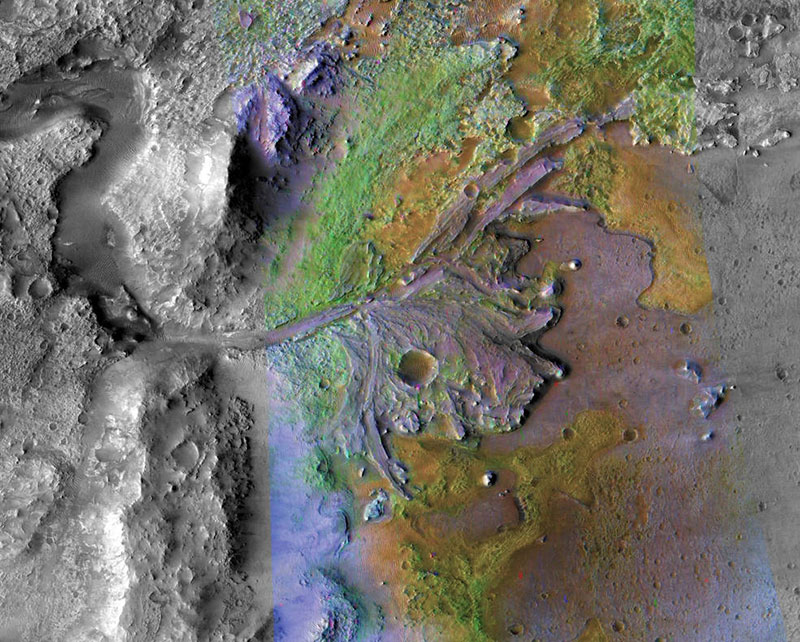
La NASA acaba de anunciar que el rover Mars 2020 y el pequeño helicóptero que lo acompañará aterrizarán en el cráter Jezero el día 18 de febrero de 2021 –un martes– si despega al principio de la ventana de lanzamiento, que...

Virgin Orbit sigue dando pasos de cara al primer lanzamiento de un LauncherOne, en este caso con el primer vuelo cautivo de uno de estos cohetes suspendido del ala del Cosmic Girl, el Boeing 747-400 modificado para convertirse en su lanzador....

The Cygnus space freighter from @NorthropGrumman was captured at 5:28am ET with the Canadarm2 robotic arm operated by NASA astronaut @AstroSerena backed up by @ESA astronaut @Astro_Alex. https://t.co/ki0KQXt7Xy pic.twitter.com/NSwtS2jH4X— Intl. Space Station (@Space_Station) 19 de noviembre de 2018 La cápsula de carga...

A las 20:28, hora peninsular española, del 18 de noviembre de 2018, con un minuto de adelanto sobre el horario previsto, la cápsula de carga Progress MS-10 atracaba en el módulo Zvezda de la Estación Espacial Internacional. La Progress MS-10 lleva...

A veces, cuando tu avión está a poca altura sobre las nubes y el Sol está al otro lado de tu ventanilla –porque vuelas en ventanilla, ¿no?– es posible ver una gloria del piloto. Se trata de varios anillos de color...

Con dos días de retraso sobre lo previsto debido a las malas condiciones meteorológicas la cápsula de carga Cygnus NG-10 despegaba a las 10:01:31, hora peninsular española, del 17 de noviembre de 2018 de la Plataforma de lanzamiento 0A del Mid-Atlantic...

Los suspiros de alivio deben haberse oido hasta en Próxima Centauri cuando el 16 de noviembre de 2018 un cohete Soyuz FG ponía en órbita sin ningún tipo de problemas la cápsula de carga Progress MS-10. Lleva a bordo unos 2.450...

Internet, YouTube y la Wikipedia siguen siendo lugares maravillosos, en los que gracias a los hiperenlaces y a canales como Half as Interesting puedes aprender todo tipo de conocimientos inútiles pero maravillosos, como por ejemplo: En el popular programa infantil de...

El satélite de telecomunicaciones qatarí Es’hail-2 ya está en órbita de transferencia geoestacionaria tras ser lanzado por un Falcon 9 de SpaceX. La primera etapa del cohete, por su parte, aterrizó sin problemas en el espaciopuerto flotante Of Course I Still...

Todo está listo en la plataforma de lanzamiento número 5 del cosmódromo de Baikonur para el lanzamiento de la cápsula de carga Progress MS-10 rumbo a la Estación Espacial Internacional. Es un lanzamiento del que toda la comunidad espaciotrastornada, por no...

Antes tan siquiera de empezar con las operaciones de carga de combustible en el cohete Antares que ha de ponerla en órbita la NASA y Northrop Grumman decidieron posponer el lanzamiento de la cápsula de carga Cygnus 10. El motivo, las...

Todo está listo en el Complejo de lanzamiento 39A del Centro espacial Kennedy para el lanzamiento del satélite de telecomunicaciones qatarí Es'hail 2 a bordo de un Falcon 9 bloque 5. El lanzamiento reutilizará la primera etapa B1047, que en su...

Todo está listo en la Plataforma de lanzamiento 0A del Mid-Atlantic Regional Spaceport (Espaciopuerto regional del medio Atlántico) para el despegue de un cohete Antares con la cápsula de carga Cygnus 10 rumbo a la Estación Espacial Internacional. Bautizada como S.S....

Virgin Orbit está cada vez más cerca de poner en vuelo a Cosmic Girl con un cohete LauncherOne bajo su ala, pues acaban de hacer sus primeras pruebas de rodaje a alta velocidad, incluyendo un despegue abortado a unos 200 kilómetros...

El Programa de servicios de lanzamiento (Launch Services Program, LSP), que es el departamento de la NASA que se encarga de contratar los cohetes con los que se lanzan las misiones de la agencia, acaba de certificar el Falcon 9 de...
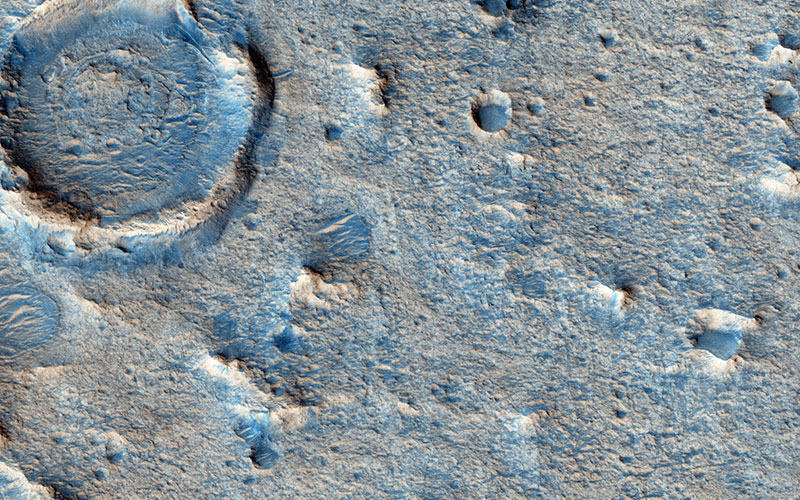
A menos que la Agencia Espacial Europea o Roscosmos vean algún problema con ello el rover de la misión conjunta ExoMars 2020 aterrizará en Oxia Planum, una planicie en la que en el pasado remoto vertían numerosos canales. El proceso de...

A las 17:50, hora peninsular española, del miércoles 7 de noviembre de 2018 alexander Gerst y Serena Auñón-Chancellor dieron el comando al brazo robot de la Estación Espacial Internacional para liberar el carguero espacial Kounotori 7 tras 41 días en la...

Rocket Lab's second orbital Electron mission #ItsBusinessTime. A successful launch and more payloads on orbit. We're opening access to space. pic.twitter.com/0HgJ1aNtdS— Rocket Lab (@RocketLab) 11 de noviembre de 2018 A las 4:50, hora peninsular española, el It's Business Time despegaba del Complejo...

A finales de junio de 2018 Rocket Lab estaba lista para lanzar el cohete Electron bautizado It's Business Time en la que iba a ser la primer misión comercial de la empresa. Pero lecturas raras del controlador del motor hicieron que...
Aunque aún quedan semanas antes de que la Parker Solar Probe se encuentre en una posición desde la que pueda transmitir los datos que está almacenando durante su primer perihelio ya sabemos que ha sobrevivido sin problemas. A primeras horas del...

En la década de los 60 del siglo pasado Aerojet diseñó un cohete que hubiera dejado pequeño incluso al enorme N1 soviético con sus 105 metros de largo y 17 de ancho. También dejaba en mantillas al Saturno V del programa...
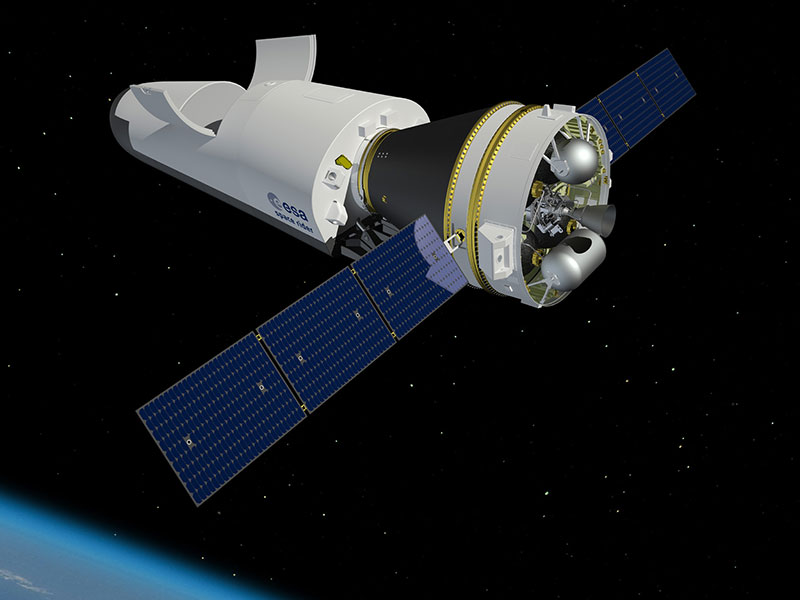
Tras las pruebas realizadas con el Atmospheric Reentry Demonstrator y mas recientemente con el Intermediate Experimental Vehicle la Agencia Espacial Europea ha contratado con Thales Alenia el desarrollo de las especificaciones del Space Rider, el futuro avión espacial Europeo. El Space...

Un fallo eléctrico en el cohete Pegasus XL que ha de ponerlo en órbita ha obligado a cancelar el primer intento de lanzamiento del satélite ICON de la NASA unos minutos antes de la suelta del cohete. El avión Stargazer ha...
Este estupendo vídeo de TED-Ed explica algunos detalles teóricos y prácticos de la Ley de gravitación universal, esa fuerza –desde los tiempos de Einstein mejor entendida como una deformación del espacio-tiempo– que afecta a todos los objetos con masa. Es algo...

Lanzamiento del MetOp-C - Jeremy Becj / Spaceflight Insider El segundo Soyuz ST lanzado en 2018 cumplió a la perfección con su misión y tras despegar a la 1:47:27, hora peninsular española, del 7 de noviembre de 2018, ha dejado al satélite...

Tras varios retrasos –tenía que haber sido lanzada en diciembre de 2017– porque los sensores del cohete daban lecturas un tanto extrañas durante los vuelos de transporte y de prueba todo parece listo, por fin, para el lanzamiento de la misión...

El segundo Soyuz ST de 2018 está ya en la plataforma de lanzamiento del espaciopuerto de Kourou para el lanzamiento del satélite meteorológico MetOp-C. Con nueve instrumentos a bordo su objetivo principal es la observación de la atmósfera terrestre y su...
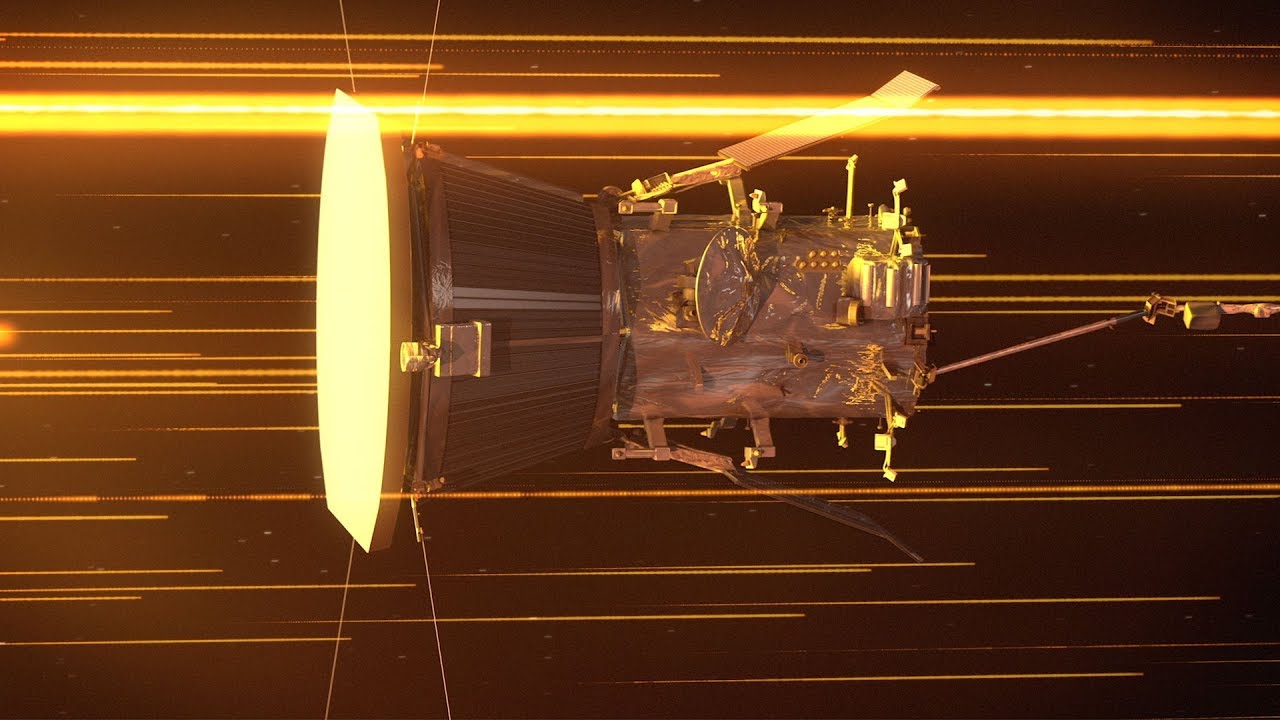
Según los cálculos de la NASA a las 4:28, hora peninsular española, del 6 de noviembre de 2018 la Parker Solar Probe pasará por el perihelio –el punto más cercano al Sol– de su primera órbita. En ese momento estará a...

Los tiempos avanzan que es una barbaridad y la NASA acaba de publicar el primer vídeo 8K grabado en el espacio. Está rodado con cámaras 8K UHD desde el interior de la Estación Espacial Internacional y eso marca un pequeño hito....

Según se puede leer en Scientists count whales from space la resolución de las imágenes por satélite disponibles públicamente ha mejorado tanto que permite no sólo contar ballenas sino también distinguir a qué especie pertenecen en imágenes captadas desde 620 kilómetros...

Tras despegar del Cosmódromo de Plesetsk a las 21:17, hora peninsular española, del 3 de noviembre de 2018 el satélite Glonass-M 57 está en una órbita de 19.122×19.163 kilómetros con una inclinación de 64,8 grados, lo que confirma el funcionamiento correcto...

Todo está listo en el cosmódromo de Plesetsk para el lanzamiento de un satélite del sistema de navegación Glonass a bordo de un cohete Soyuz 2.1b con una etapa superior Fregat. Es el segundo lanzamiento de un cohete Soyuz desde el...
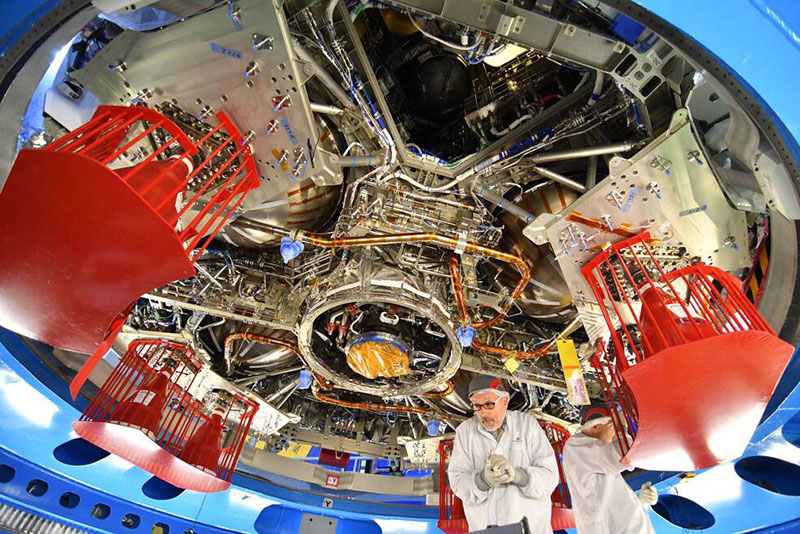
Una cápsula Orión más allá de la Luna con el ESM en primer plano La planta de Airbus en Bremen ha sido el lugar en el que se ha hecho entrega a la NASA del primer módulo de servicio para la cápsula...
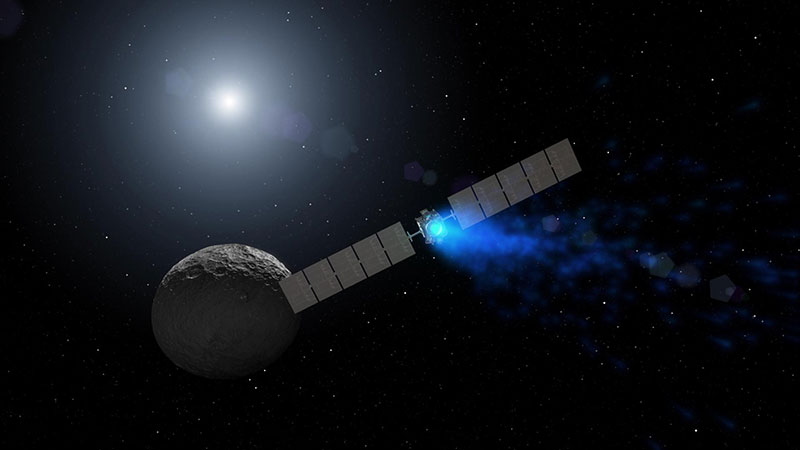
La sonda Dawn de la NASA no se comunicó con el control de la misión en sendas sesiones programadas para los días 31 de octubre y 1 de noviembre. Eliminadas otras posibilidades el equipo de la misión ha llegado a la...

La comisión encargada de investigar la causa del fallo del lanzamiento de la cápsula tripulada Soyuz MS-10 ya ha emitido su informe. Su conclusión es que el fallo se produjo porque durante el ensamblado del cohete Soyuz FG que la lanzó...
Hacía tiempo que no teníamos fotos en las que se viera la Estación Espacial Internacional al completo. Desde 2011 si no me equivoco, con unas impresionantes fotos de la Estación con el Endeavour atracado en ella, unas de las fotos más...

Atención, espaciotrastornados: si el Tesla Roadster de Elon Musk conducido por Starman que fue lanzado al espacio por el primer Falcon Heavy llevaba un Tesla Roadster de Hot Wheels en el salpicadero ahora es Hot Wheels la que saca una edición...
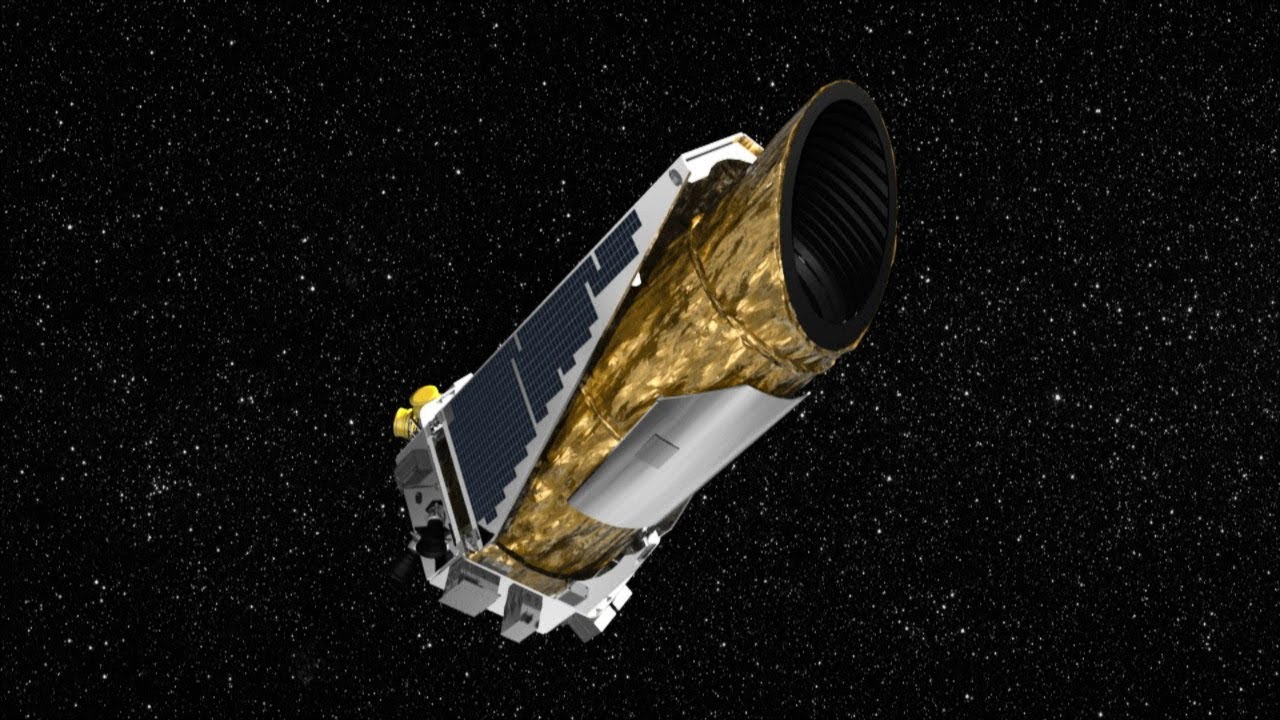
Tras haber exprimido hasta la última gota de combustible que llevaba a bordo a la NASA no le ha quedado más remedio que dar por finalizada la misión del observatorio espacial Kepler, tal y como puede leerse en NASA Retires Kepler...

@MarsRovers is still in the fight! #WakeUpOppy #OppyPhoneHome pic.twitter.com/OI4wa1YDaH— Michael Staab (@AstroStaab) 30 de octubre de 2018 El equipo de la misión y los espaciotrastornados de todo el mundo respiramos aliviados porque la NASA, tras escuchar las opciones planteadas sobre la posible...
#ParkerSolarProbe has just become the closest-ever spacecraft to the Sun! It's now within 26.55 million miles of the solar surface, breaking the record set by Helios 2 in 1976. More: https://t.co/PtZV54CFRN pic.twitter.com/3fgPkWTUdc— NASA Sun & Space (@NASASun) 29 de octubre de 2018...

Tras el tercer lanzamiento del Advanced Supersonic Parachute Inflation Research Experiment, o Experimento Avanzado de Inflado de Paracaídas Supersónicos, la NASA ha certificado para ser utilizado en Marte el paracaídas que utilizará con el rover Mars 2020. Aspire es una especie...
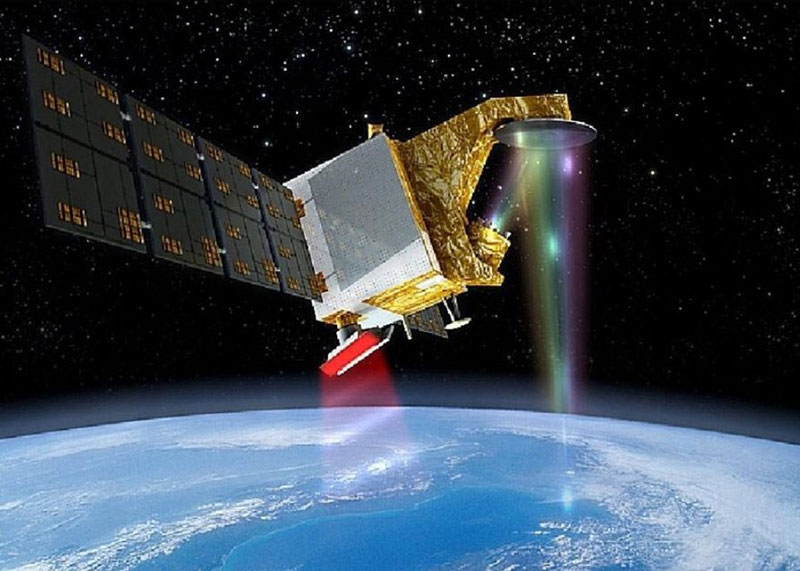
Con pocas horas de diferencia en la noche del 28 al 29 de octubre de 2018 fueron lanzados con éxito los satélites medioambientales CFOSat y GOSat 2 desde China y Japón. El CFOSat, de China-France Oceanography SATellite, Satélite de oceanografía China-Francia, fue...

Jim Bridenstine, actual director de la NASA pero en el pasado aviador naval, habla en este vídeo con Nick Hague, el astronauta de la NASA que iba a bordo de la Soyuz MS-10 cuando falló el cohete lanzador y hubo que...

Tras conseguir poner en funcionamiento un giroscopio que había fallado por el viejo, universal, y casi infalible método de apagarlo, encenderlo y sacudirlo un poco, el telescopio espacial Hubble vuelve a estar «aciendo la cencia». En concreto a las 8:10, hora...

En esta pequeña gran superproducción del Museo Americano de Historia Natural la astrofísica Jackie Faherty enseña a gente de todas las edades diversas visualizaciones, fotografías y animaciones 3D de la Vía Láctea. Muchas de estas visualizaciones provienen de los datos del...

El primer cohete Zhuque 1 de LandSpace despegaba del Centro de Lanzamiento de Satélites de Jiuquan a las 10:00, hora peninsular española, del 27 de octubre de 2018, en lo que tenía que haberse convertido en el primer lanzamiento orbital de...
New @Virgin_Orbit video shows the integration process between the company's Boeing 747 "Cosmic Girl" and the LauncherOne rocket.The test is "to verify mechanical, electrical, software, and dynamics all work together for the first time," founder @richardbranson said in a post. pic.twitter.com/oFswW2d8RQ— Michael...
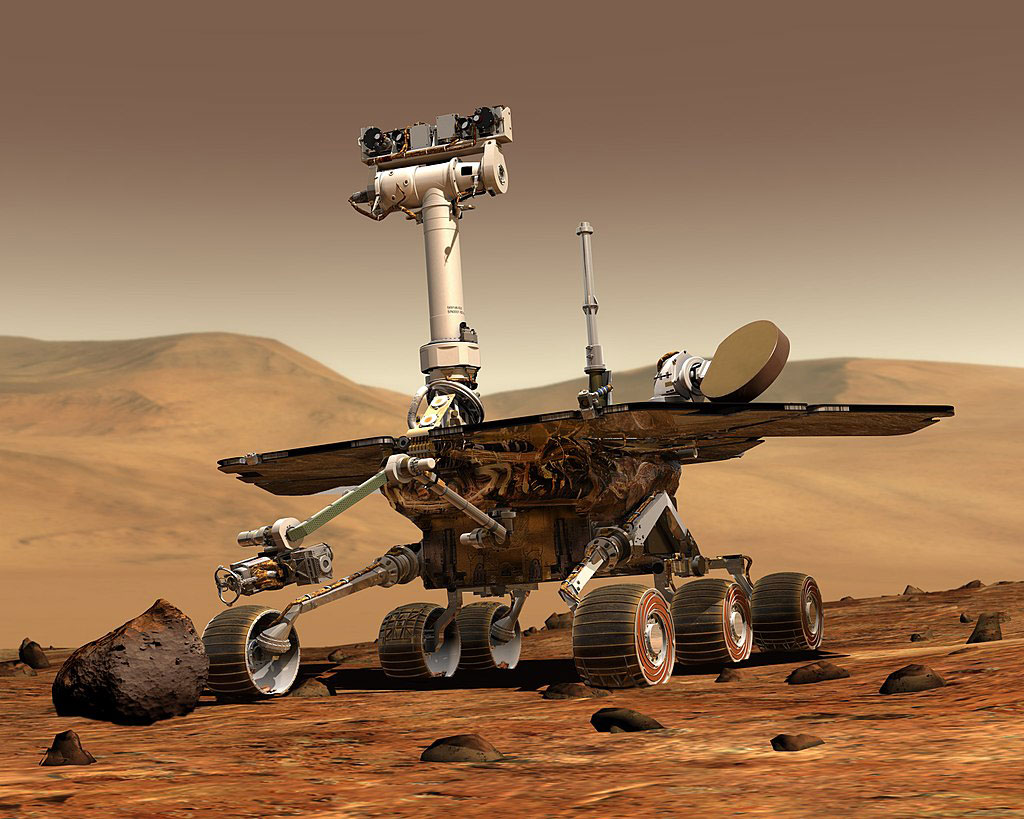
Hoy, 26 de octubre de 2018, se cumplen los 45 días que la NASA se había marcado como plazo inicial para intentar recuperar el contacto con Opportunity una vez que la atmósfera de Marte volvió a estar lo suficientemente limpia como...

El año 2018 no sólo va a ser de récord para China en cuanto a lanzamientos espaciales –desde el 24 de agosto ya está superado el récord de 22 lanzamientos de 2016– sino que también se va a convertir, con toda...

[TD1-R3] The target marker (TM) is confirmed to be reflected in the image from the Optical Navigation Camera - Wide angle (ONC-W1). This image was taken after the TM landed on Ryugu's surface. The point in the green circle is the TM....

El pasado 5 de octubre fallaba uno de los giroscopios del telescopio espacial Hubble. Como esto es algo que puede suceder en cualquier momento el software de a bordo está listo para detectarlo y activar automáticamente uno de los giroscopios de...
El pasado 5 de mayo de 2018, junto con la sonda InSight que tiene previsto aterrizar en Marte el 26 de noviembre, la NASA lanzaba al espacio los CubeSat de la misión MarCO, de Mars Cube One. En realidad no forman...

Los socios de la Estación Espacial Internacional y los responsables de Roscosmos en particular respiran aliviados después de que un cohete Soyuz 2.1b haya puesto en órbita sin problemas un satélite militar del tipo Lotos S-1. Y es que el Soyuz...

Ariane 6 Vinci engine: end of qualification tests! See the press release here: https://t.co/27fA1Bpb90 pic.twitter.com/1HqGBVFabj— ArianeGroup (@ArianeGroup) 22 de octubre de 2018 Después de 148 encendidos de prueba el motor Vinci, que será el que utilice la segunda etapa del cohete Ariane...

Este vídeo muestra la prueba de hace unos días del denominado sistema de diluvio (deluge system) de la famosa plataforma 39B del Centro Espacial Kennedy. Esta instalación se utiliza para absorber y reducir todo lo posible el calor extremo que genera...

Todo está listo en el cosmódromo de Plesetsk para el lanzamiento del tercer satélite militar Lotos-S1 de inteligencia electrónica de señales. Sería un lanzamiento al que ni los espaciotrastornados le haríamos mucho caso de no ser porque el lanzador es un...
![imagen]()
Impresión artíctica Hayabusa 2 tomando muestras en el cráter que va a crear – Akihiro Ikeshita/JAXA Tras haber cumplido con éxito los objetivos del segundo simulacro –básicamente comprobar que el altímetro láser funcionaba de forma fiable– la sonda Hayabusa 2 de la...

{Ligerísimos spoilers, si acaso hechos históricos pueden considerarse «spoilers»} Al igual que a directores como Chistopher Nolan (Inception, Batman) o Mark Rosenberg (Approaching the Unknow) a Damien Chazelle, creador de First Man le gusta usar el mínimo de efectos especiales generados...
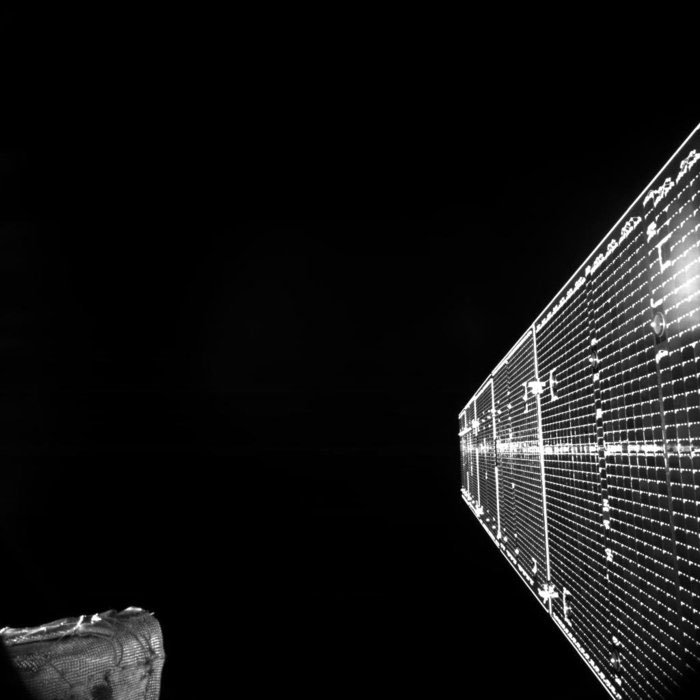
Tras su lanzamiento en la madrugada del sábado 20 de octubre de 2018 y cumpliendo con el programa previsto el Mercury Transfer Module o Módulo de Transferencia a Mercurio (MTM) de la misión BepiColombo, que básicamente contiene los motores y el...
Tras un lanzamiento perfecto el Mercury Composite Spacecraft (Nave Compuesta para Mercurio, MCS), que es el conjunto que forman el Mercury Planetary Orbiter (MPO), Orbitador Planetario de Mercurio de la Agencia Espacial Europea; el Mercury Magnetospheric Orbiter, Orbitador Magnetosférico de Mercurio...
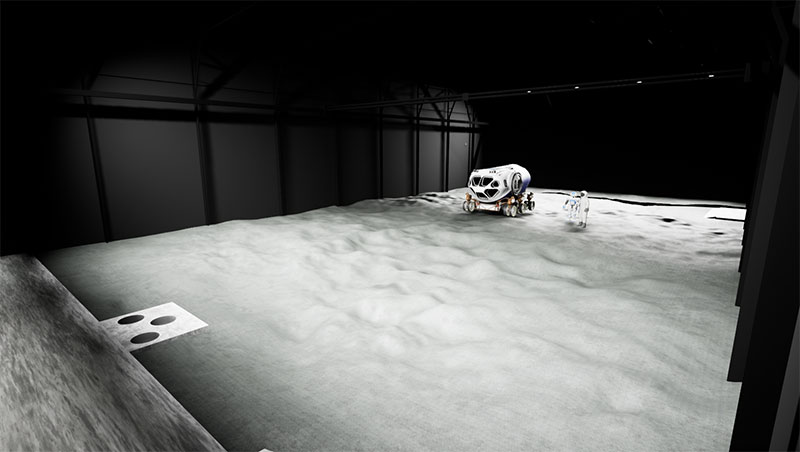
Con el sorprendente nombre de Luna la Agencia Espacial Europea va a construir un análogo de la superficie de la Luna en el Centro Europeo de Astronautas en Colonia. Se usará para probar nuevos desarrollos tecnológicos y para entrenar a los...

Este espectáculo nocturno tan espectacular es la Space Waste Lab Performance, un montaje de Studio Roosegarde en Kunstlinie (Países Bajos) que busca concienciar al público general con el problema de la basura espacial. El montaje proyecta láseres verdes de alta potencia...

One Small Step es un precioso, entrañable y lacrimógeno cortometraje de animación de Andrew Chesworth y Bobby Pontillas (Taiko Studios), que cuenta la historia de Luna, una niña que sueña con ser astronauta. Está tan bien producida y con una animación...

Todo está preparado en el espaciopuerto de Kourou para el lanzamiento de la misión conjunta BepiColombo de la Agencia Espacial Europea (ESA) y de la Agencia Japonesa de Exploración Aeroespacial (JAXA) que tiene como destino Mercurio. BepiColombo está compuesta en realidad...
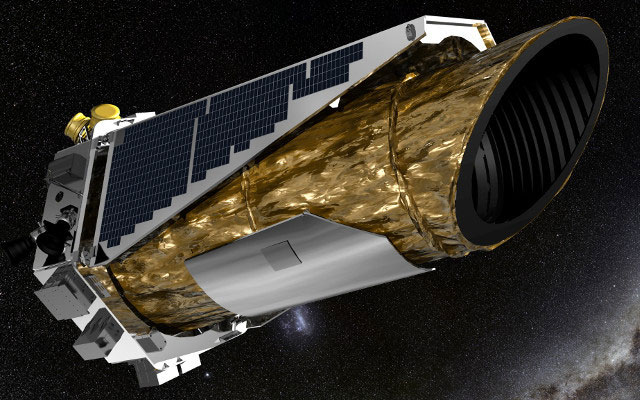
Desde principios de 2018 la NASA está como jugando al ratón y al gato con el observatorio espacial Kepler: su combustible está a punto de acabarse, con lo que la agencia tendrá que decidir cuando lo apaga, aunque al mismo tiempo...

[TD1-R1-A] Image received on the ground on October 15 at about 22:52 JST. pic.twitter.com/aO9AbGBPRq— HAYABUSA2@JAXA (@haya2e_jaxa) 15 de octubre de 2018 El segundo simulacro de aproximación de la sonda japonesa Hayabusa 2 al asteroide Ryugu ha conseguido acercarla a tan sólo 22,3...
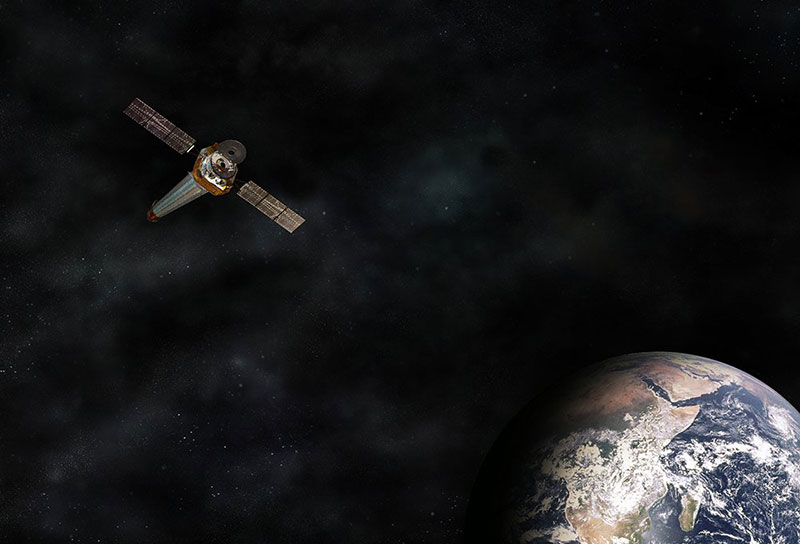
Tal y como se sospechaba desde el principio lo que hizo que el observatorio Chandra de rayos X entrara en modo seguro el pasado 10 de octubre de 2018 fue un fallo en uno de sus giroscopios. En concreto fueron tres...

A las 6:23 de la madrugada, hora peninsular española, del 15 de octubre de 2018 el décimo cohete Larga Marcha 3 del año despegaba con los satélites tipo BeiDou-3M números 15 y 16 del sistema de navegación por satélite chino; son...
A la 1 de la noche, hora peninsular española, del 14 de octubre de 2018, la sonda Hayabusa 2 de la agencia Japonesa de Exploración Aeroespacial (JAXA) ha iniciado su segundo simulacro de descenso al asteroide Ryugu para tomar muestras, aunque...

El Observatorio Chandra de rayos-X se ha unido al resto de las misiones de la NASA que estos últimos días estñan dando problemas y tal y como se puede leer en Chandra Enters Safe Mode; Investigation Underway entraba en modo seguro...

En Gansu (China) se ha enseñado a la prensa una base simulada que con aspecto de escenario de cualquier película de exploración espacial: su centro de control con grandes pantallas, invernadero, laboratorios, trajes aislantes de moderno diseño… Lo dicho, que hasta...
Beyond Earth: A Chronicle of Deep Space Exploration es un libro escrito por el historiador del espacio Asif Azam Siddiqi y publicado por la NASA disponible gratuitamente en formatos epub, mobi y PDF. De la descripción del libro: Los seres humanos han...

Los dos orbitadores que forman la misión conjunta a Mercurio BepiColombo de la Agencia Espacial Europea y de la Agencia Japonesa de Exploración Aeroespacial, junto con su módulo de propulsión, ya están unidos al Ariane 5 ECA que los lanzará, si...
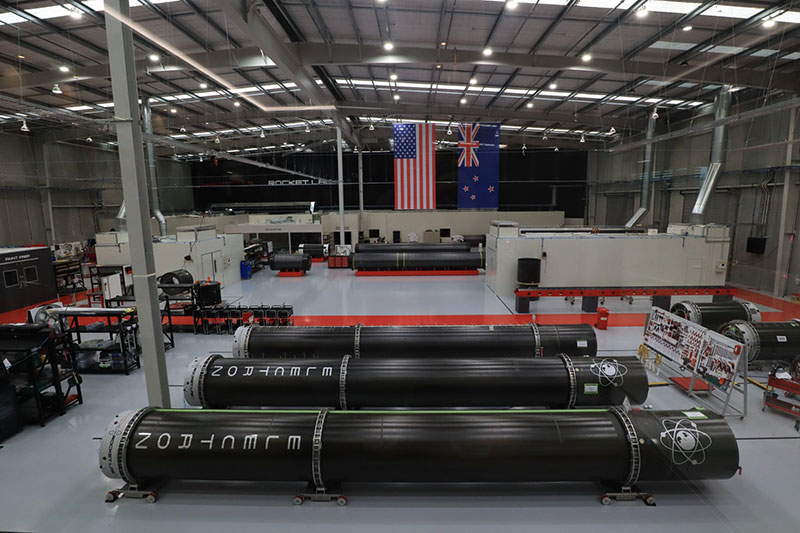
La empresa estadounidense Rocket Lab acaba de inaugurar una fábrica en Auckland, Nueva Zelanda, en la que es capaz de recibir, probar, y ensamblar los componentes de un cohete Electrón en una semana. Los 7.500 metros cuadrados de la nueva fábrica...

Rendezvous with Mars, de Mayukh Goswami, Subigya Basnet y Divya More es el ganador absoluto en la categoría de Project Mars, el concurso organizado por la NASA para contar mediante un corto de hasta 5 minutos y un póster la historia...

El fallo de uno de los cuatro propulsores de la primera etapa del cohete Soyuz-FG que tenía que haber puesto en órbita la cápsula tripulada Soyuz MS-10 ha obligado a abortar la misión. En el vídeo se aprecia, sobre el minutos...

Esta es la segunda versión de Cosmic Eye (2011/2018), un viaje cósmico en el MundoReal™ desde la cotidianeidad de una escena que parte de una sonrisa en el Googleplex de Silicon Valley a lo más grande e inimaginable… Y vuelta hasta...

Todo está listo en el Cosmódromo de Baikonur para el lanzamiento de la cápsula tripulada Soyuz MS-10 rumbo a la Estación Espacial Internacional. Está previsto para las 10:40, hora peninsular española, del 11 de octubre de 2018. Y como usará la...
Just switched to my Side-A computer so the team can diagnose a tech issue with the B side. (I carry two computers for situations like this.) Redundant systems: don’t leave Earth without them. https://t.co/e2jHXkNHXN pic.twitter.com/LMeBMJ54mU— Curiosity Rover (@MarsCuriosity) 3 de octubre de...
El viernes 5 de octubre de 2018 falló el tercero de los seis giroscopios que el telescopio espacial Hubble utiliza para detectar movimientos en cualquiera de sus ejes y así contrarrestarlo para mantenerse perfectamente estable durante sus observaciones. Con el fallo...
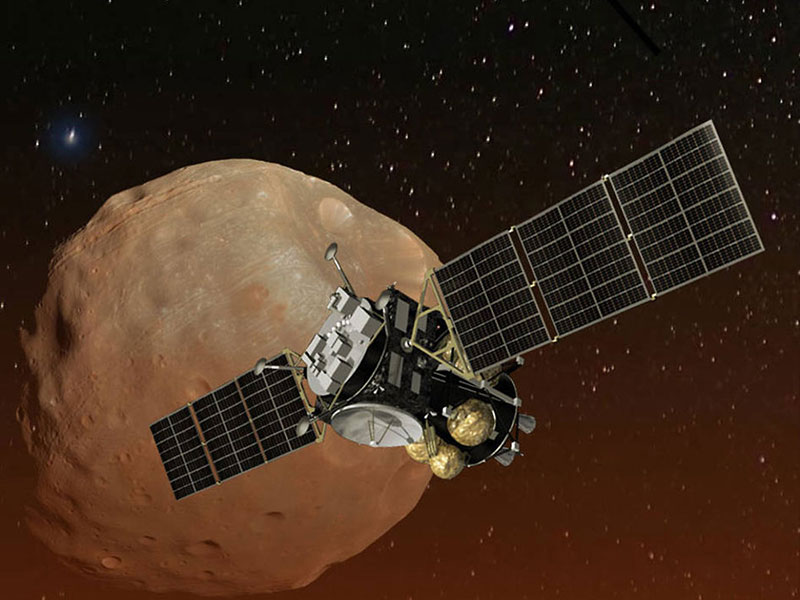
Tras el éxito del rover MASCOT, desplegado por la sonda Hayabusa 2 sobre la superficie del cometa Ryugu, la Agencia Japonesa de Exploración Aeroespacial (JAXA) acaba de anunciar un acuerdo con el DLR, el Centro Aeroespacial Alemán, y el CNES, el...

Despegue del cohete y aterrizaje de la primera etapa – SpaceX El satélite argentino de observación terrestre mediante radar Saocom 1A está en una órbita de 607;×634 kilómetros y 97,9 grados de inclinación tras haber sido lanzado por un Falcon 9 bloque...

Tal y como cuenta la NASA en Launch Dates to be Updated More Regularly as Commercial Crew Flights Draw Nearer los primeros lanzamientos de la Crew Dragon de SpaceX y de la Starliner de Boeing se van a retrasar al menos...

Vista del complejo de lanzamiento desde la plataforma de aterrizaje – SpaceX SpaceX tiene todo listo en el Complejo de lanzamiento 4E de la Base de la Fuerza Aérea de Vandenberg para poner en órbita el satélite radar argentino Saocom 1A. Es...

Este proyecto del Team Zopherus es uno de los ganadores del concurso Printed Habitat Challenge de la NASA, que básicamente pretende buscar métodos de construcción de hábitats sostenibles en la Luna y en Marte, mediante el uso de nuevas tecnologías y...
Osiris-Rex en configuración de tomar muestras Además de la sonda Hayabusa 2 de la Agencia Japonesa de Exploración Aeroespacial (JAXA), que lleva desde finales de julio de 2018 estudiando el asteroide Ryugu hay otra misión en curso con destino a un asteroide....

La Soyuz MS-08 tomaba tierra al sudeste de la ciudad de Dzhezkazgan en Kazajistán a las 13:44, hora peninsular española, del 4 de octubre de 2018, poniendo fin a su misión. A bordo venían Oleg Artemyev de Roscosmos y Drew Feustel...
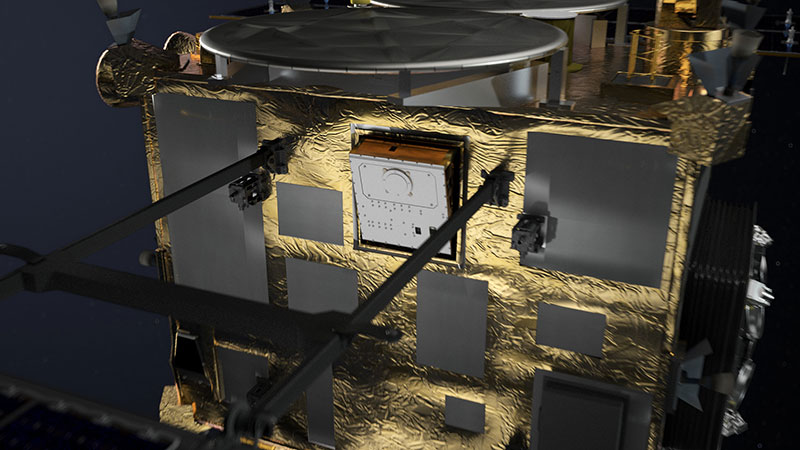
All done with work! Oh my... can that be right? I explored Ryugu for more than 17 hours. That is more than my team expected. Do I get paid overtime for this? #asteroidlanding— MASCOT Lander (@MASCOT2018) 4 de octubre de 2018 Al...

A las 10:46, hora peninsular española, del 3 de octubre de 2018 la Parker Solar Probe de la NASA hacía el primero de los siete sobrevuelos de Venus que tiene programados dentro de su misión principal. Las maniobras de asistencia gravitatoria...
La Shenzhou 11 (arriba) y el Tiangong 2 vistos por el satélite Banxing–2 - Academia China de las Ciencias Lanzado en septiembre de 2016 como banco de pruebas para la futura estación espacial china el laboratorio espacial Tiangong 2 terminará su misión...
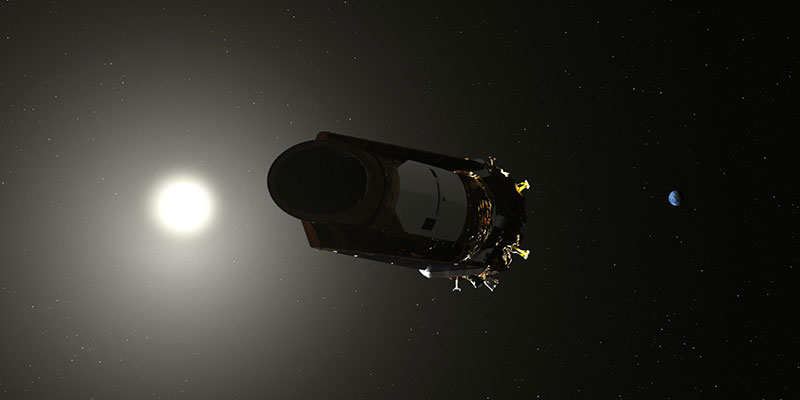
Desde principios de 2018 la NASA está intentando sacar todo el partido posible del observatorio espacial Kepler antes de que se le termine el combustible. Pero cada vez le cuesta más. En julio ya lo tuvo que poner en hibernación ante...
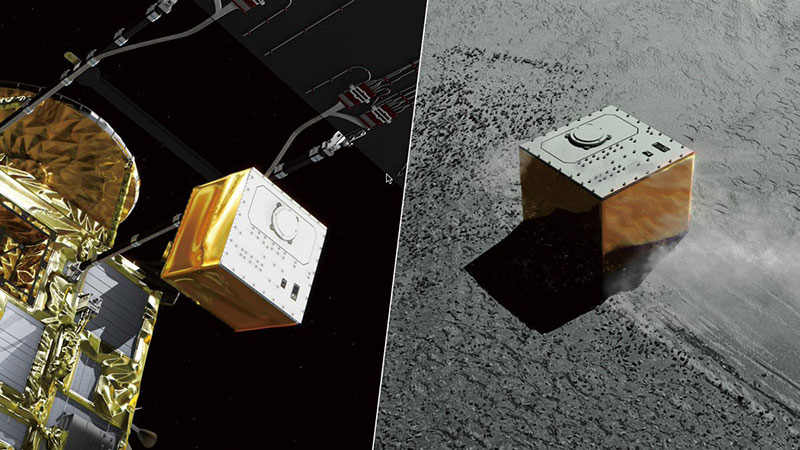
Otro éxito para la misión Hayabusa 2 de la Agencia Japonesa de Exploración Aeroespacial (JAXA): el rover MASCOT del DRL, el Centro Aeroespacial Alemán, y el CNES, el Centro Nacional de Estudios Espaciales francés, ha aterrizado sin problemas en el asteroide...

European Space Talks es una iniciativa de la Agencia Espacial Europea que busca llenar nuestro continente de charlas sobre el espacio durante el mes de noviembre. La idea es que cualquiera a quien le interese el espacio las pueda organizar en su...

Mientras terminan de construir el banco de pruebas que les permitirá terminal de certificarlo para el vuelo desde PLD Space acaban de anunciar la firma de un acuerdo con el Centro Alemán de Tecnología Espacial Aplicada y Microgravedad (ZARM) para que...
Se acerca otro momento crucial de la misión de la sonda Hayabusa 2 con el despliegue de MASCOT, el rover diseñado por el DRL, el Centro Aeroespacial Alemán, y el CNES, el Centro Nacional de Estudios Espaciales francés. MASCOT, de Mobile...

Rover-1B succeeded in shooting a movie on Ryugu’s surface! The movie has 15 frames captured on September 23, 2018 from 10:34 - 11:48 JST. Enjoy ‘standing’ on the surface of this asteroid! [6/6] pic.twitter.com/57avmjvdVa— HAYABUSA2@JAXA (@haya2e_jaxa) 27 de septiembre de 2018 La...

La Agencia Espacial Europea acaba de anunciar que la misión de Luca Parmitano a la Estación Espacial Internacional en 2019 se llamará Beyond, Más allá en inglés. El nombre sigue una línea inspirada por los nombres de las de Thomas Pesquet y...
Tal día como hoy en 2008 el primer Falcon 1 de SpaceX conseguía entrar en órbita, aunque no llevaba carga útil alguna sino un lastre que hacía las veces. Eso sí, era el cuarto intento de poner un Falcon 1 en...

La mitad telescopio a su llegada a Northrop Grumman - NASA/Chris Gunn Desde febrero de 2018 las dos mitades del Telescopio Espacial James Webb están en las instalaciones de Northrop Grumman en California para sus pruebas finales y para ser ensambladas de...

Andrew Feustel utilizó el Canadarm 2, el brazo robot de la Estación Espacial Internacional, para capturar el carguero espacial Kounotori 7 las 13:34 del 27 de septiembre, hora peninsular española. Luego, operándolo en remoto desde Houston, los controladores de la Estación...

Lo que hay en el centro del recuadro de la imagen superior, que mide 47×47 metros, es el rover Opportunity fotografiado desde unos 267 kilómetros de altura sobre la superficie de Marte por la cámara HiRISE de la Mars Reconnaissance Orbiter....

En el último minuto de la ventana de lanzamiento debido a un problema con los equipos de tierra pero el Ariane 5 número 100 despegaba a las 00:38, hora peninsular española, del 26 de agosto de 2018. 31 minutos después del...
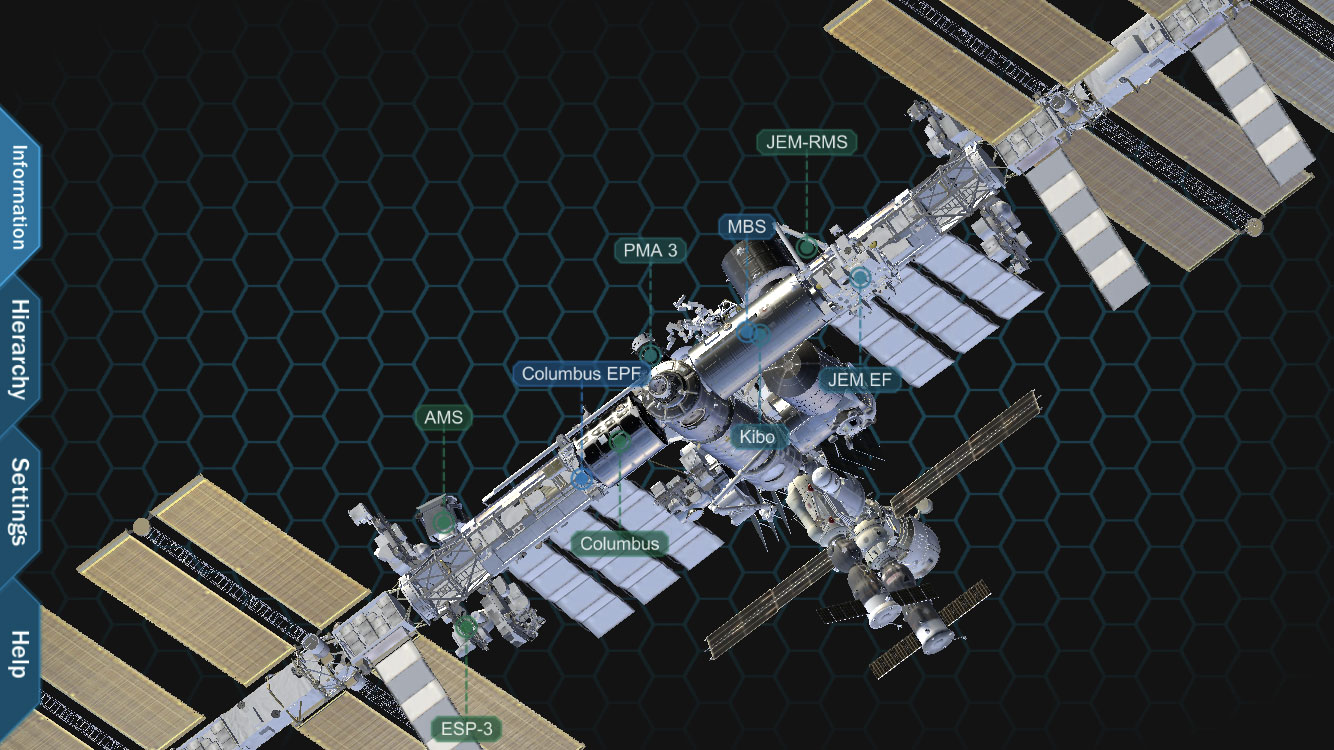
Los socios de la Estación Espacial Internacional acaban de publicar ISS Explorer, una aplicación disponible para Android e iOS con la que explorar el exterior de la Estación Espacial Internacional. Puedes manipular el modelo en 3D con los dedos para rotarlo,...
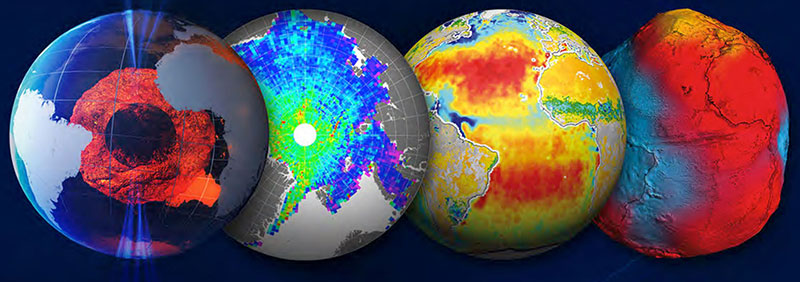
El programa de satélites artificiales Earth Explorer –Explorador de la Tierra– de la Agencia Espacial Europea tiene como objetivo cubrir las necesidades de la comunidad científica para entender nuestro planeta y su funcionamiento como sistema. Como esas necesidades van avanzando según...

Todo está listo en el Complejo de lanzamiento de Ariane número 3 del puerto espacial de Kourou en la Guayana Francesa para la puesta en órbita de los satélites de telecomunicaciones Azerspace-2/Intelsat 38 y Horizons 3e. Sería un lanzamiento rutinario más...

Lanzado el 18 de abril de 2018 el observatorio espacial TESS comenzó su misión de detectar planetas extrasolares el 25 de julio tras una fase inicial fase de pruebas y calibración. Y menos de dos meses después del inicio de su...

Imagen captada por Minerva-II 1B durante su descenso a Ryugu – JAXA La Agencia Japonesa de Exploración Aeroespacial (JAXA) tardó un poco en confirmarlo, lo que a los espaciotrastornados nos puso un poco nerviosos, pero por fin sabemos que los dos primeros...
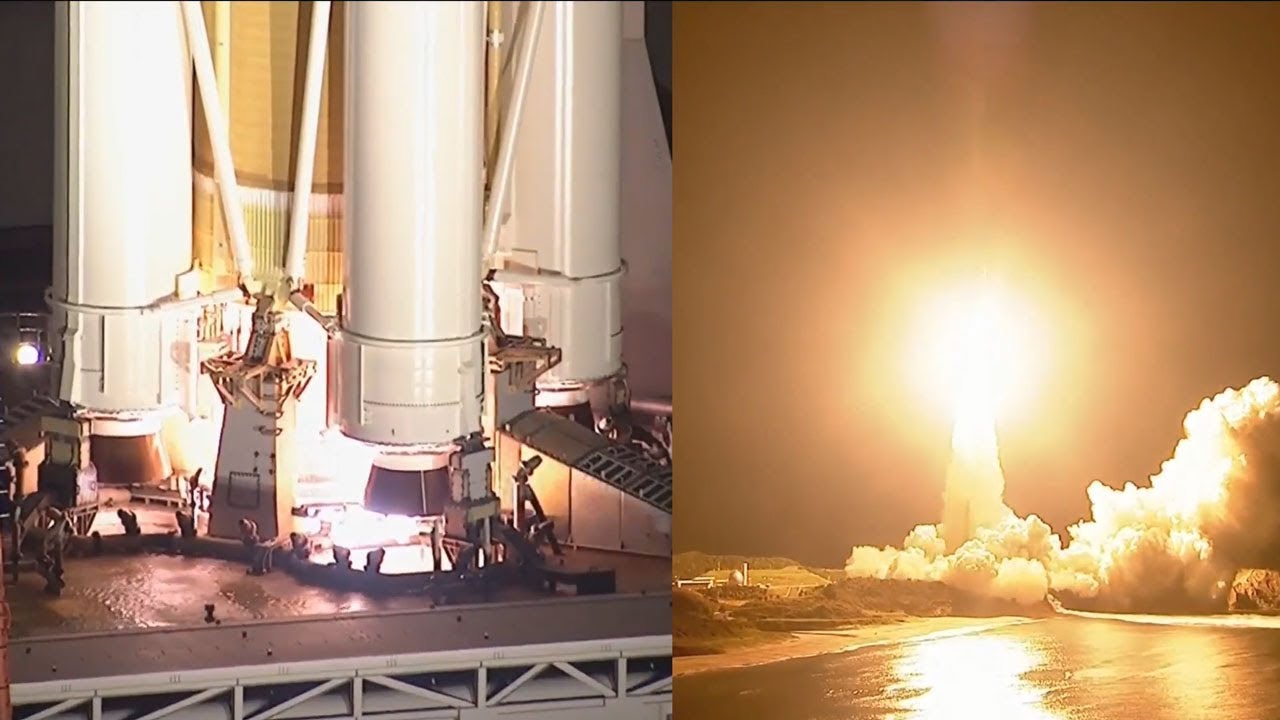
A la segunda fue la vencida y el cohete H-IIB F7, una versión de más potencia del H-II, despegó de el Complejo de lanzamiento Yoshinobu del Centro espacial de Tanegashima a las 19:52, hora peninsular española, del 22 de agosto de...
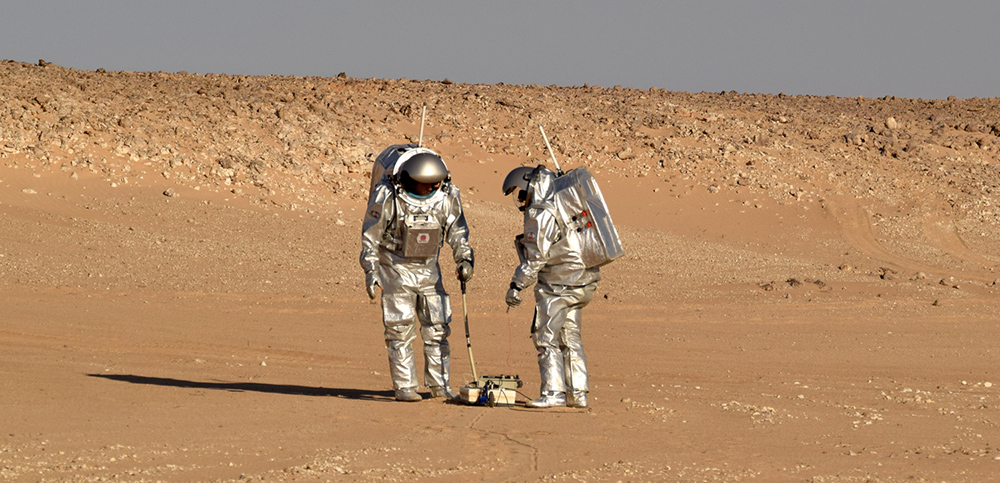
El escenario que han utilizado los astronautas italianos del Instituto Nacional de Astrofísica (INAF) que han probado este invento llamado ScanMars ha sido el desierto de Dhofar en Omán – un recóndito lugar que se parece algo a Marte por sus...

Tras solucionar el problema con la válvula del circuito de oxígeno líquido de la segunda etapa del cohete que lo va a lanzar y que obligó a cancelar el primer intento de lanzamiento todo está preparado –de nuevo– para que el...
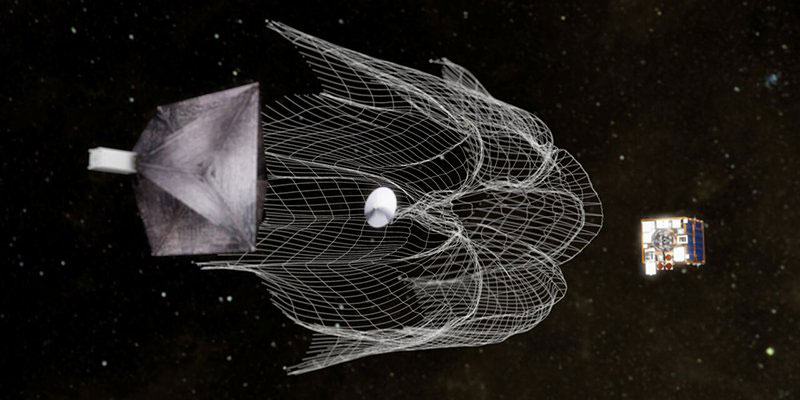
Una de las múltiples ideas que se manejan para eliminar restos de basura espacial es la de capturarlos con una red y sacarlos de su órbita mediante un satélite cazador. Y por primera vez en la historia un satélite ha demostrado...
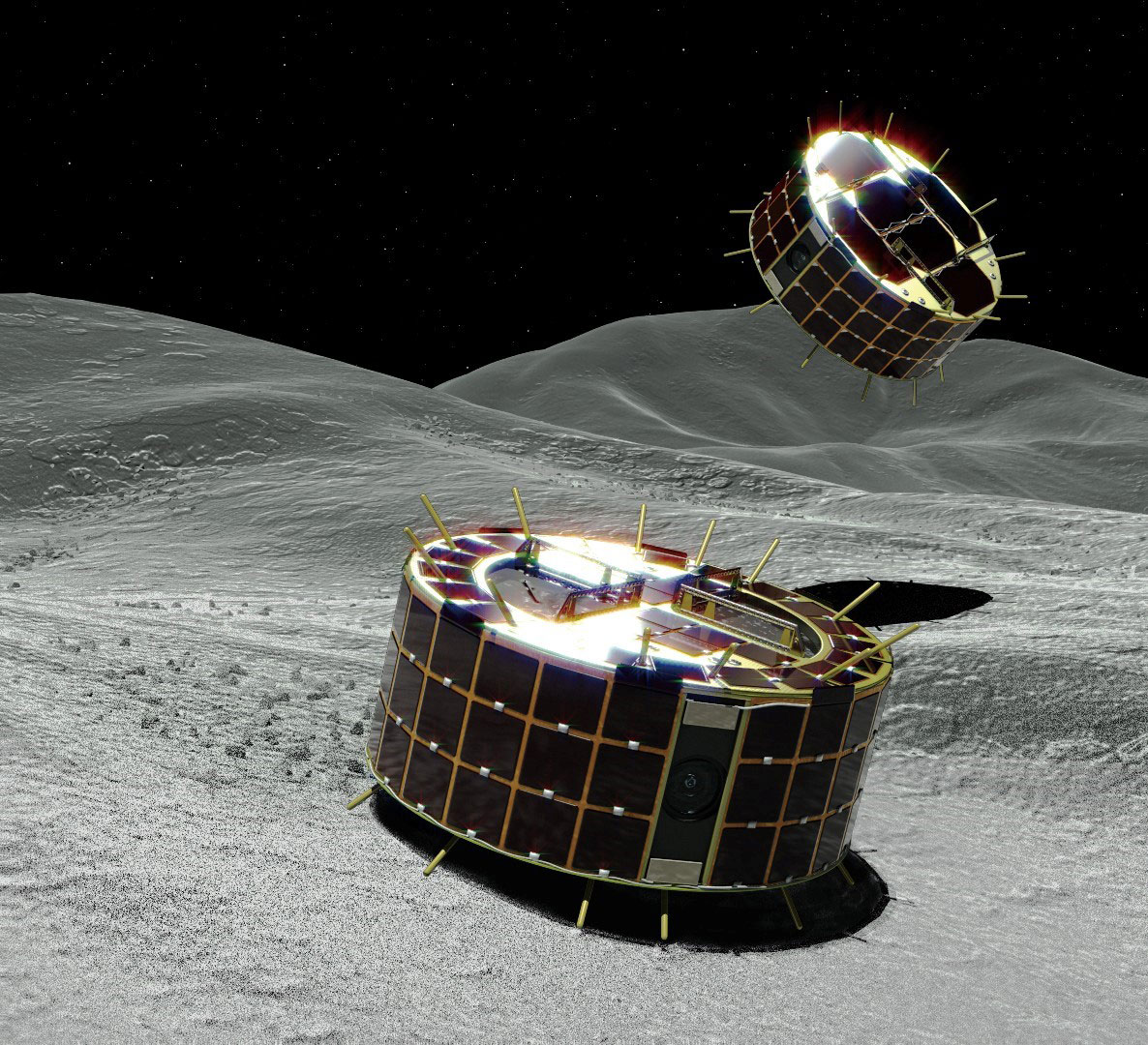
La sonda Hayabusa 2 de la Agencia Japonesa de Exploración Aeroespacial (JAXA), que lleva desde finales de julio de 2018 acompañando al asteroide Ryugu en su órbita alrededor del Sol, ha comenzado la maniobra para desplegar sobre la superficie del asteroide...

La Shenzhou 11 (arriba) y el Tiangong 2 vistos por el Banxing–2 - Academia China de las Ciencias A finales de junio especulábamos con la posibilidad de que China estuviera preparando el final del laboratorio espacial Tiangong-2 después de que hubiera bajado...

Ergol #11, Arianespace, Centro Espacial de La Guayana – Space Utopia/Vincent Fournier De 2007 a 2017 Vincent Fournier estuvo visitando instalaciones relacionadas con la investigación espacial a lo largo y ancho del mundo. No se quedó además en las agencias más conocidas...

El agujero extra encontrado en el módulo orbital de la Soyuz MS-09 que provocó una fuga de aire el pasado 30 de agosto aún sigue dando de que hablar. Todo apunta a que el agujero fue hecho en tierra accidentalmente –en...
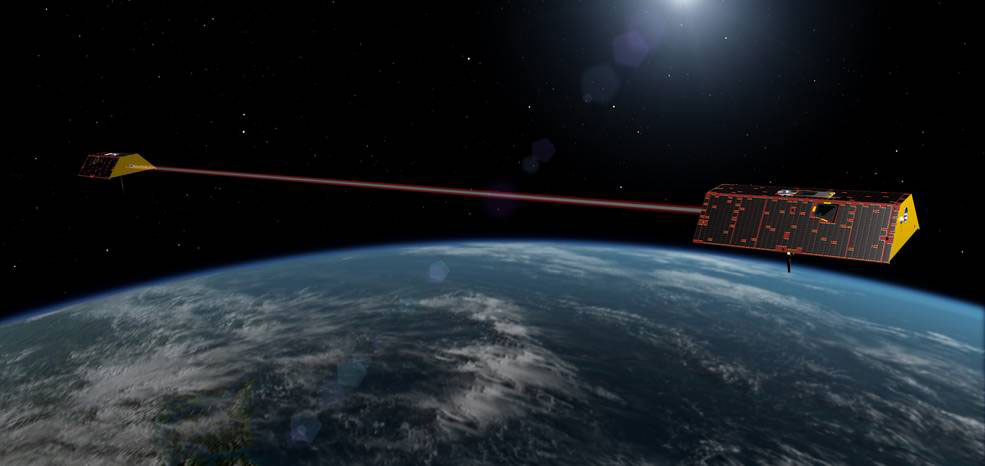
Lanzada en mayo de 2018 con el objetivo de medir de forma extremadamente detallada el campo gravitatorio terrestre la misión Grace-FO, una misión conjunta de la NASA y el DLR, su equivalente alemán, lleva desde mediados de julio sin poder recoger...

Earth at Night es un desarrollo interactivo de Jacob Wasilkowski / Petrichor que básicamente muestra un mapa del mundo con la contaminación lumínina en forma de «elevación» (montañas blancas). Cuanto más blancas y altas las montañas lumínicas, peor, porque más contaminación...
No sé hasta qué punto este kit de coleccionista tiene posibilidades de ver la luz –porque se está desarrollando sin el apoyo oficial de Lego, quien no admiten ya más propuestas sobre el tema «misiones Apolo» en general– pero desde luego...
En febrero de 2017 SpaceX anunció una misión tripulada en una Crew Dragon alrededor de la Luna para 2018, misión que nosotros dijimos que seguro que se retrasaba. De hecho se retrasó tanto que fue cancelada apenas un año después cuando...

Lanzado el 7 de marzo de 2009 para una misión de tres años y medio el observatorio espacial Kepler no sólo la cumplió con creces sino que los miembros de su equipo encontraron la forma de seguir utilizándolo aún después de...
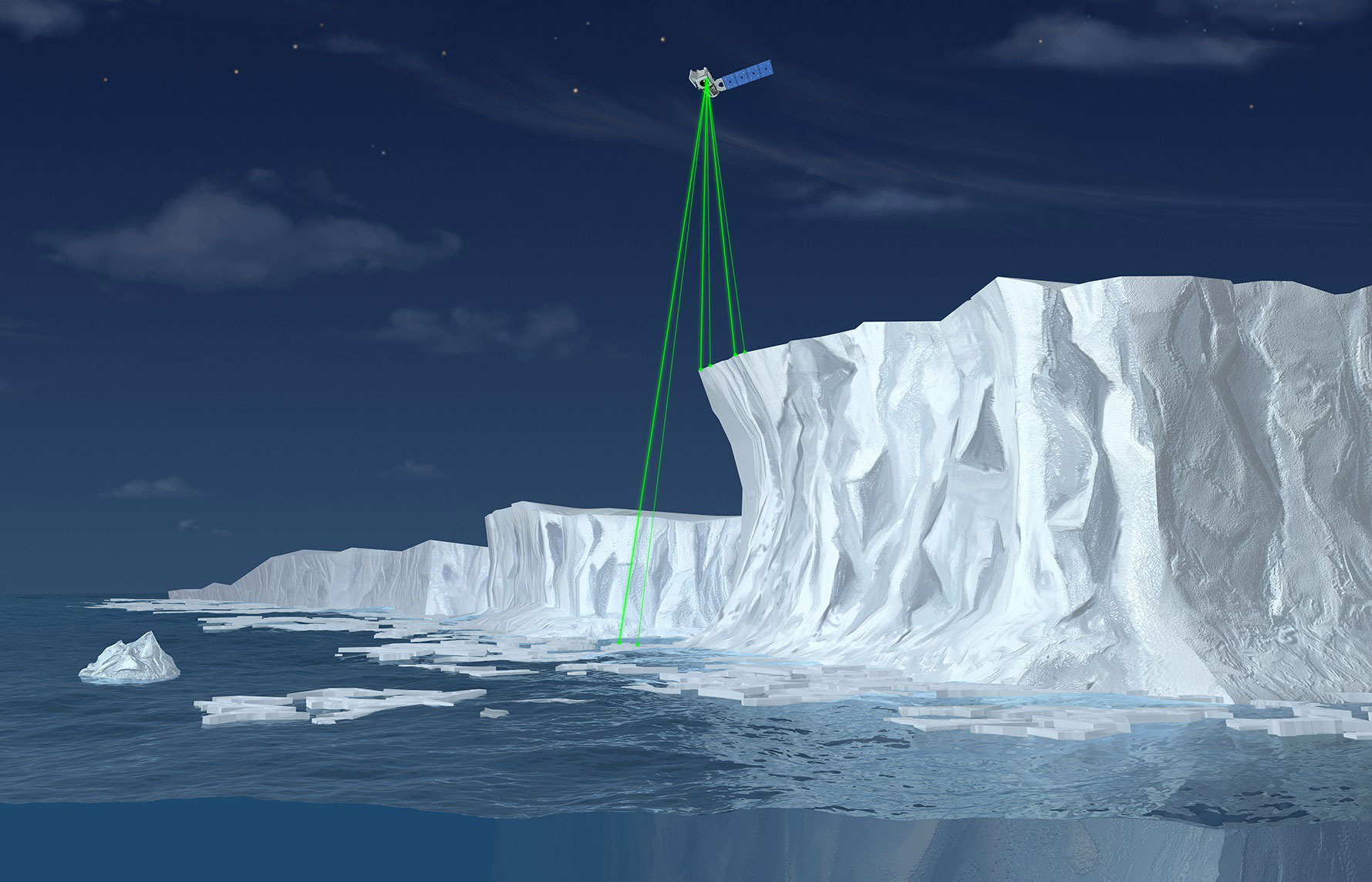
El último Delta II de United Launch Alliance cumplió a la perfección su misión de poner en órbita el satélite ICESat-2 de la NASA, que apenas 75 minutos después del lanzamiento establecía contacto con la estación de seguimiento en Svalbard para...

El resultado de combinar diversas técnicas de vídeo, realidad aumentada y el uso de una cámara Fusion 360 de GoPro hacen que el viaje de este globo a la estratosfera – algo que de tantas veces que lo vimos llegó a...
El último cohete Delta II de la historia está listo en el Complejo de lanzamiento 2 de la Base de la Fuerza Aérea de Vandenberg, en California, para el lanzamiento del satélite ICESat-2. ICESat-2 tiene como misión medir la superficie y...

El mal funcionamiento de una válvula que deja salir el exceso de oxígeno líquido de la segunda etapa del cohete H-IIB F7 que tiene que poner en órbita la cápsula de carga Kounotori 7 ha obligado a suspender el lanzamiento, que...

Todo está listo en el Centro Espacial Tanegashima para el lanzamiento de la cápsula de carga Kounotori 7 (Cigüeña blanca 7) con 6.200 kilos de suministros rumbo a la Estación Espacial Internacional. El lanzamiento correrá a cargo del cohete H-IIB F7....
Uno de los objetivos de la sonda Hayabusa 2 de la Agencia Japonesa de Exploración Aeroespacial (JAXA) es tomar muestras en tres puntos distintos de la superficie del asteroide Ryugu y traerlas de vuelta a la Tierra. Pero como es de...
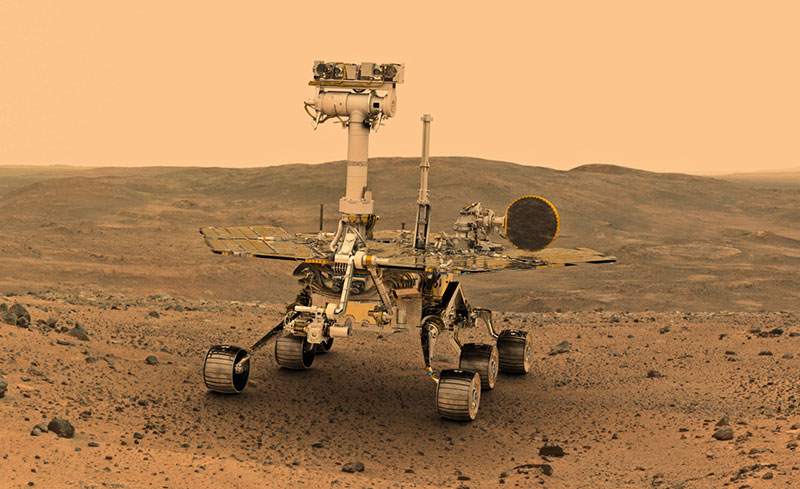
#OppyPhoneHome UpdateWith Mars' skies clearing, we'll be trying multiple times a day to command Opportunity via the Deep Space Network, and continue passive listening via broadband. More: https://t.co/YvoDCwT3Vw pic.twitter.com/6Cns83PYa7— Spirit and Oppy (@MarsRovers) 11 de septiembre de 2018 Desde hace un par...
Otro que nos está dando mucha envidia últimamente –más de la habitual, quiero decir– es Destin, de Smarter Everyday. En esta ocasión ha tenido la oportunidad de visitar la plataforma de lanzamiento del Delta IV Heavy que lanzó la Parker Solar...

Desde el departamento de predicciones del futuro desde el lejano pasado nos llega Rendezvous in Space (Cita en el espacio, 1964), un curioso cortometraje documental sobre la exploración espacial producido para la Feria Mundial de Nueva York de 1964. Es especialmente...

Bueno, más o menos, porque lo que le dejan ver y tocar son una reproducción a escala real de una Crew Dragon, la cápsula tripulada de SpaceX, el simulador en el que los futuros tripulantes se entrenan para manejarla, y el...

En el verano de 2016 Maia Weinstock lanzó una propuesta para que que Lego sacara al mercado un conjunto que homenajea a cinco mujeres importantes en la historia de la NASA. La propuesta fue extremadamente popular y en seguida consiguió los...

#Aeolus' laser system emits short powerful pulses of ultraviolet light down to Earth. The telescope aboard the satellite collects the light backscattered from the air molecules, dust and water droplets, explains @Leonardo__Space rep at the European launch event @esaoperations pic.twitter.com/JxgCzxutc8— ESA EarthObservation...

A las 6:45, hora peninsular española, del 10 de septiembre de 2018 un Falcon 9 bloque 5 de SpaceX despegaba del Complejo de lanzamiento 40 de Cabo Cañaveral para poner en órbita el satélite de telecomunicaciones Telstar 18 Vantage, también conocido...
El Sanctuary Project es uno de esos proyectos raros, raros que combinan cultura en forma de arte, música y ciencia con la exploración espacial. La forma de hacerlo será una especie de cápsula del tiempo con decenas de discos de 5...
Lanzado el 10 de diciembre de 1999 el observatorio espacial de rayos X bautizado como XMM-Newton se convierte desde hoy, 6 de septiembre de 2018, en la misión más longeva de la Agencia Espacial Europea al superar los 6.842 días que...

Hazza al-Mansouri y Sultan al-Neyadi son los nombres de los dos primeros candidatos a astronauta seleccionados por el programa espacial de los Emiratos Árabes Unidos de un total de nueve candidatos iniciales. Hazza al-Mansouri, de 34 años, es piloto de caza con...
Después de informar del sellado de una pequeña fuga de aire en el módulo orbital de la Soyuz MS-09 el pasado 30 de agosto ni la NASA ni Roscosmos ni ninguno de los otros socios de la Estación Espacial Internacional, donde...
En este vídeo animado del Museo Americano de Historia Natural se muestra la posición relativa de la eclíptica del Sistema Solar respecto al plano en el que orbitan las estrellas alrededor de la Vía Láctea. No coinciden, ni mucho menos. Aunque...

Después de una semana en órbita ejecutando una nueva iteración del experimento Izgib la cápsula de carga Progress MS-08 terminaba su misión desintegrándose en la atmósfera sobre una zona remota del Pacífico en la madrugada del 30 de agosto de 2018....
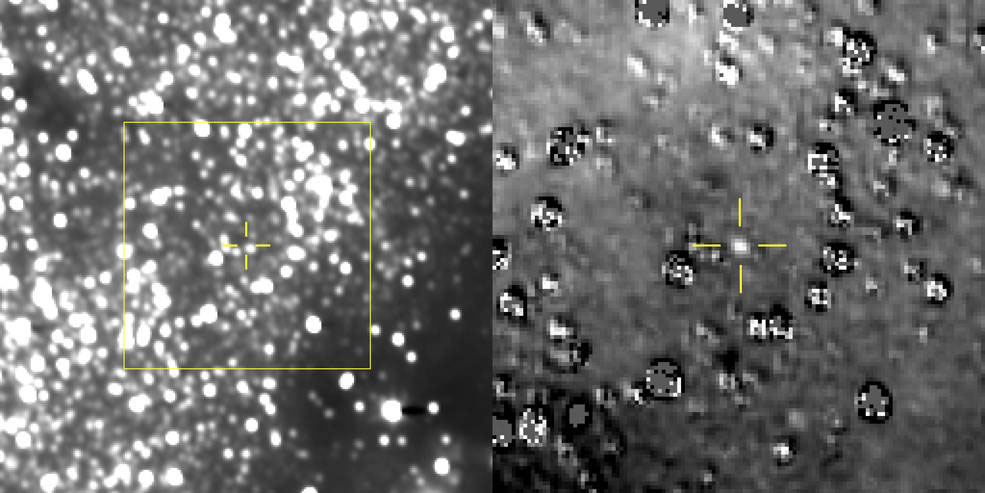
La sonda New Horizons de la NASA, que despertó de su hibernación a principios de junio de 2018 para preparar su encuentro con 2014 MU69, un objeto del cinturón de Kuiper que ha sido bautizado informalmente como Ultima Thule por el...

El vídeo Inside Space Shuttle Discovery 360 ofrece un recorrido inmersivo, en 360° y resolución hasta 8K, por el interior de la lanzadera espacial Discovery. El recorrido grabado por la gente de Google Arts & Culture en el interior de la...
Por Nacho Palou -
31 AGO 2018
A la 1 de la noche del 30 de agosto de 2018 los controladores de vuelo de la NASA en Houston detectaron una pequeña caída en la presión atmosférica de la Estación Espacial Internacional. Como la caída era muy pequeña –la...

Tim Dodd, nuestro querido Everyday Astronaut, está a punto de convertirse en nuestro odiado Everyday Astronaut. Y es que después de visitar las instalaciones de Boeing en Houston para probarse el traje que utilizarán los tripulantes de la Starliner y meterse...

Después de ponernos los dientes largos con su prueba del traje que utilizaran los tripulantes de la CST-100 Starliner de Boeing Tim Dodd –Everyday Astronaut para Internet– vuelve a la carga, en este caso metiéndose en los simuladores que se utilizan...

Robb Kulin, uno de los miembros del grupo de candidatos a astronauta seleccionados por la NASA en 2017, ha presentado su dimisión, que será efectiva el próximo 31 de agosto. Con esto Kulin habrá completado algo menos de la mitad del...

A new outer space record – 6 people in a crew cabin the size of a phone booth! pic.twitter.com/8bZfEdjXda— Ricky Arnold (@astro_ricky) 27 de agosto de 2018 En esta foto que hay tuiteado Ricky Arnold salen los seis miembros de la Expedición...
OSIRIS-REx, la misión de la NASA que tiene como objetivo estudiar el asteroide Bennu y traer muestras de su superficie a Tierra, ya tiene a la vista su objetivo. Desde el pasado 17 de agosto y a unos 2,2 millones de...

Un cohete Larga Marcha 3B con una etapa superior Yuanzheng-1 puso en órbita el pasado 24 de agosto de 2018 los satélites número 35 y 36 del sistema de navegación Beidou. Es el lanzamiento espacial número 23 en lo que va...

El 25 de agosto de 2003 un cohete Delta II despegaba desde el Complejo de lanzamiento 17 de Cabo Cañaveral para poner el órbita el telescopio espacial Spitzer de la NASA, aunque el Spitzer no entró oficialmente en servicio hasta el...
Desde el pasado 10 de junio Opportunity no da señales de vida. Esto es debido a que Marte quedó cubierto por una tormenta de polvo global que ha impedido que los paneles solares del rover recargaran sus baterías. De hecho la...
Tras un lanzamiento sin problemas por parte del duodécimo cohete Vega de Arianespace el satélite Aeolus de la Agencia Espacial Europea ya está en órbita, con sus paneles solares desplegados, y en comunicación con el control de la misión. Ahora viene...
La sonda Hayabusa 2 de la Agencia Japonesa de Exploración Espacial, que acompaña al asteroide Ryugu en su órbita desde finales de julio de 2018, lleva a bordo ni mas ni menos que cuatro aterrizadores que depositará en su superficie a...

Me he encontrado con este vídeo de la primera etapa número B1046 de un Falcon 9 bloque 5 mientras la transportan de vuelta de Puerto Cañaveral a las instalaciones de SpaceX en Cabo Cañaveral después del lanzamiento del satélite de telecomunicaciones...

No tengo claro de si en el colmo de la ironía o de forma totalmente adecuada el lanzamiento de la misión Aeolus de la Agencia Espacial Europea para medir el viento ha sido pospuesto 24 horas a causa de la presencia...
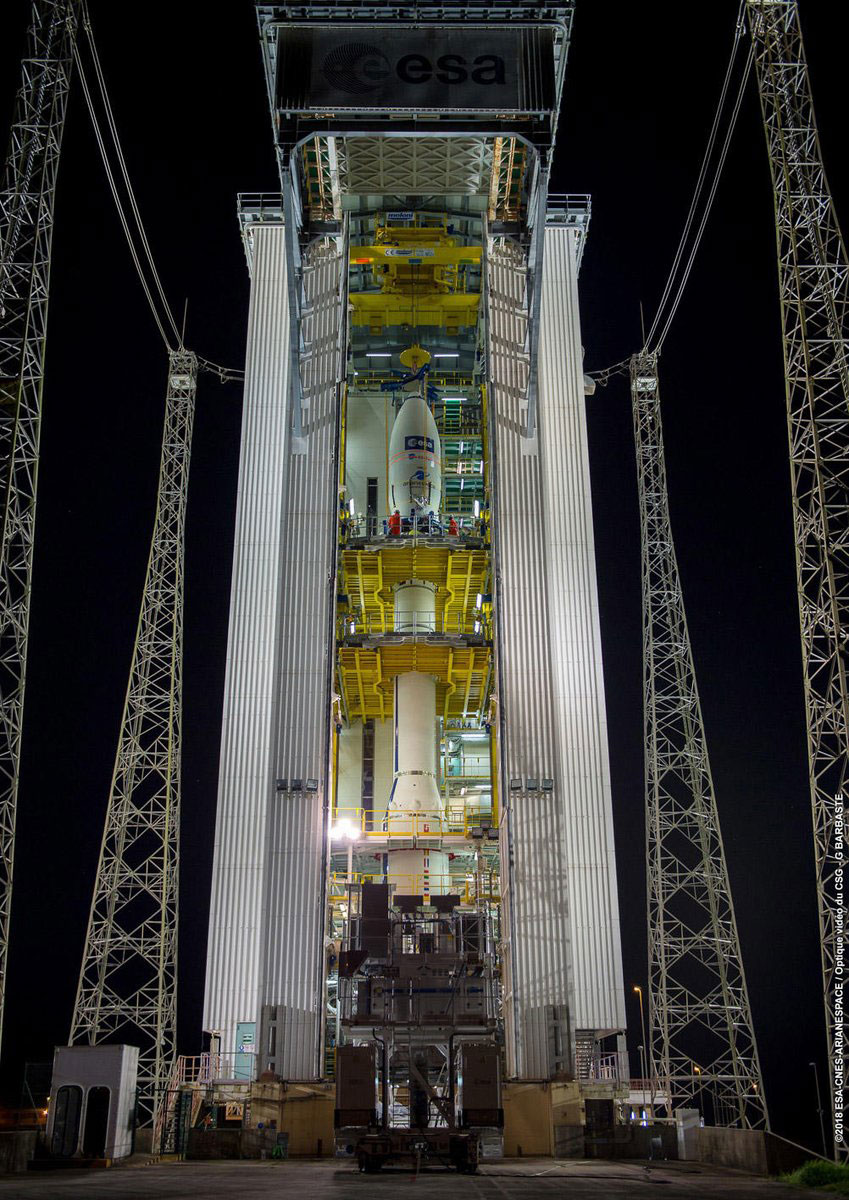
El duodécimo Vega, el cohete más pequeño del que dispone la Arianespace, está ya listo en el espaciopuerto de Kourou para el lanzamiento de la misión Aeolus de la Agencia Espacial Europea. ADM-Aeolus, de Atmospheric Dynamics Mission Aeolus, Misión Aeolus de...
En un paseo espacial que duró 7 horas y 46 minutos Oleg Artemyev y Sergey Prokopyev dejaron instalada la antena que, desde el exterior de la Estación Espacial Internacional, va a recoger las señales transmitidas por las balizas GPS de la...

Tim Dodd, más conocido como Everyday Astronaut, el tipo que allá por 2013 se compró un traje soviético para vuelos a gran altitud que se ha convertido prácticamente en su medio de vida aunque casi lo haya matado tres veces, ha...
El primer ministro indio, en su discurso del día de la independencia de 2018, ha anunciado que el país lanzará su primera misión tripulada en 2022 o incluso antes: Cuando la India celebre sus 75 años de independencia en 2022, y...

A finales de junio, después de tener que aplazar por segunda vez el lanzamiento del cohete Electron bautizado como It's Business Time por haber obtenido lecturas extrañas del controlador del motor, Rocket Lab anunciaba que posponía todos sus lanzamientos hasta nueva...

A la segunda ha sido la vencida y desde as 9:31, hora peninsular española, del 12 de agosto de 2018 la Parker Solar Probe de la NASA viaja con destino al Sol, aunque tardará siete años en alcanzar su órbita definitiva....

Toda una serie de problemas se fueron comiendo los 65 minutos de la ventana de lanzamiento hasta que hubo que cancelar el lanzamiento de la Parker Solar Probe en la mañana del 11 de agosto de 2018. Primero problemas con el...
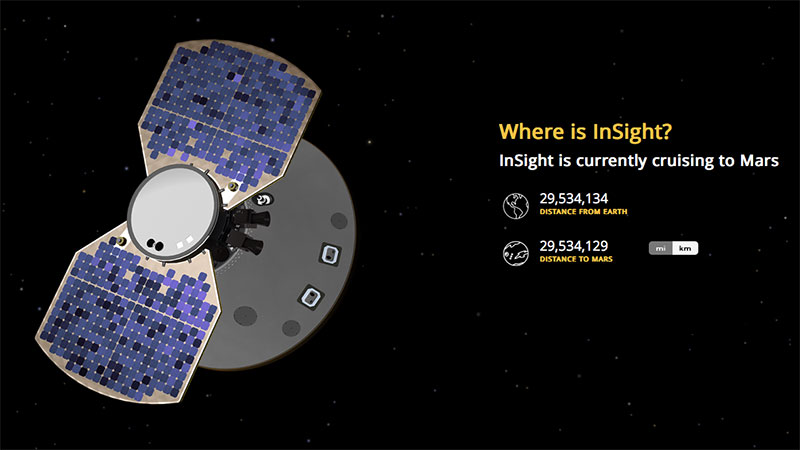
Desde unos segundos después de las 9 de la mañana del 9 de agosto de 2018, hora peninsular española, la sonda Insight de la NASA y sus compañeros de viaje los CubeSats Mars Cube One están más cerca de Marte que...

Después de algunos meses hablando de ello la administración Trump, a través del vicepresidente Mike Pence, anunciaba los pasos que va a dar para que la Fuerza Espacial de los Estados Unidos sea una realidad en 2020. Según un informe preparado...
The Parker #SolarProbe mission & launch teams today concluded a successful Launch Readiness Review. There are no technical issues being worked at this time. Teams are proceeding for liftoff on Sat, Aug. 11, @ 3:33 am ET on @ulalaunch Delta IV Heavy...

I made this animation of the most recent images on JAXA's website from Hayabusa2's wide angle camera (ONC-W1) taken during its current Gravity Measurement Ops. Clip contains images received up to 2018-08-06 23:23 UTC (I'll update as they post more images). #ryugu(Images:...

No todos los días se construye un nuevo complejo de lanzamiento, así que la Arianespace está documentando profusamente el proceso de construcción del que a partir de 2020 servirá para los Ariane 6, que se convertirán en el cohete de más...

El Challenger Center ha publicado la primera de las clases de ciencias que la astronauta Christa McAuliffe tenía previsto realizar en el espacio, en la misión del transbordador Challenger que despegó el 28 de enero de 1986. Christa McAuliffe fue el...
Por Nacho Palou -
8 AGO 2018
Aunque al equipo de la misión se le ocurrió un método que ha permitido seguir utilizando el observatorio espacial Kepler para buscar planetas extrasolares aún después de que se estropearan las ruedas de reacción que lo estabilizaban de vez en cuando...
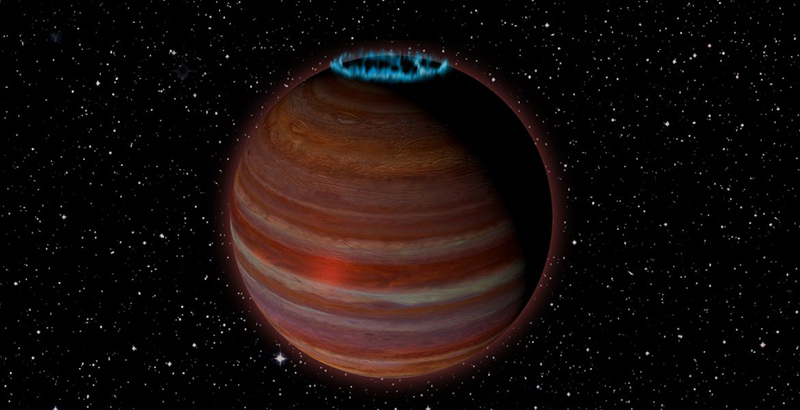
Utilizando el radiotelescopio VLA (Very Large Array) astrónomos han localizado un objeto de masa planetaria más allá de nuestro Sistema Solar que es 12,7 veces más masivo que Júpiter, que presente una campo magnético "sorprendentemente potente" y que viaja errante por...
Por Nacho Palou -
7 AGO 2018

SpaceX ha lanzado con éxito el satélite de telecomunicaciones Merah Putih para Telekom Indonesia, colocándolo en una órbita de transferencia geoestacionaria con un Falcon 9 bloque 5. La primera etapa del cohete es la misma que lanzó el satélite de telecomunicaciones...
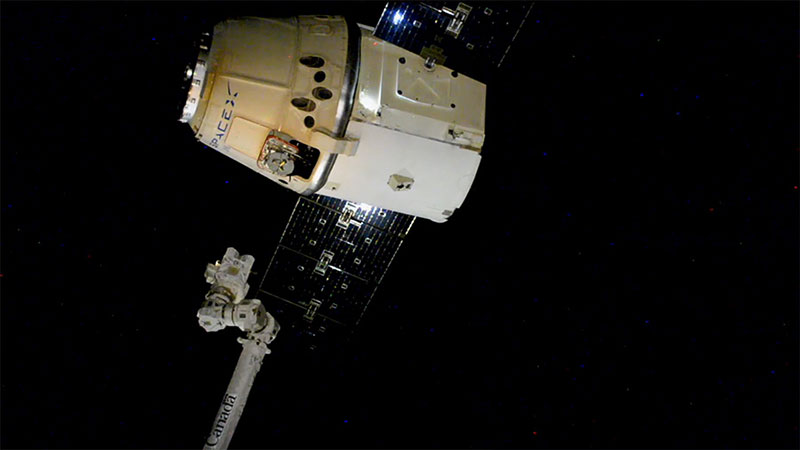
A los mandos del equipo que lo maneja desde Tierra el brazo robot de la Estación Espacial Internacional dejó ir la cápsula de carga Dragon 15 a las 18:38, hora peninsular española, del 3 de agosto de 2018. A bordo venían...

De izquierda a derecha Sunita Williams, Josh Cassada, Eric Boe, Nicole Mann, Christopher Ferguson, Douglas Hurley, Robert Behnken, Michael Hopkins y Victor Glover – NASA Desde que el 8 de julio de 2011 el transbordador espacial Atlantis despegara en la última misión...
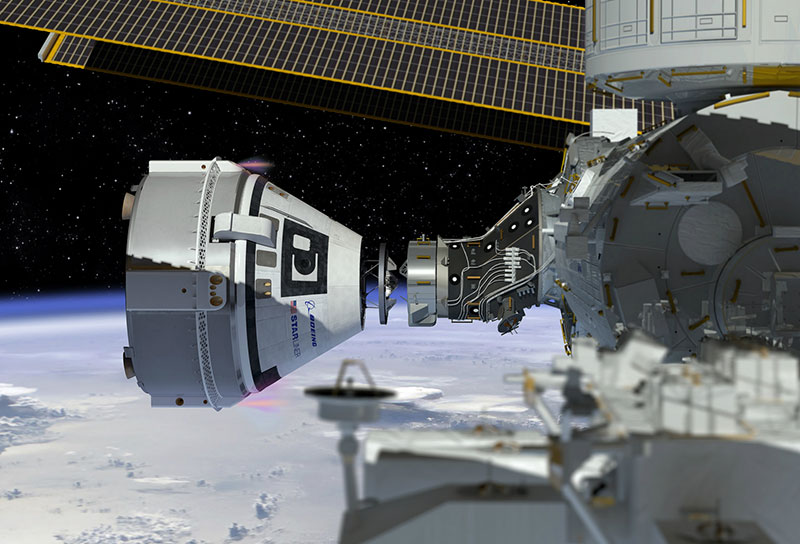
A finales de junio Boeing hizo una prueba del sistema de escape de su futura cápsula tripulada y aunque los motores funcionaron como estaba previsto al apagarlos hubo una fuga de combustible. No está claro si el problema está en los...

Una reentrada controlada en la atmósfera el este de Nueva Zelanda a las 23:17, hora peninsular española, del 30 de julio de 2018 ponía fin a la misión de la cápsula de carga Cygnus OA-9E «S.S. J.R. Thompson». Lanzada el 21...

Con el lanzamiento del satélite de observación terrestre Gaofen-11 a las 5:00 del 30 de julio de 2018, hora peninsular española, a bordo de un Larga Marcha 4B, China ha igualado su récord absoluto de lanzamientos espaciales en un año, que...
Ha tardado un poco más de lo previsto inicialmente –la NASA había hablado de unos 60 días después del lanzamiento– pero el pasado 27 de julio de 2018 la agencia anunciaba que el observatorio TESS ya está recogiendo datos. TESS, de...
De vez en cuando la Agencia Espacial Europea organiza eventos a los que los espaciotrastornados podemos acudir para vivir un poco más de cerca algún momento especial de una de las misiones de la agencia. El próximo de estos eventos tendrá...
"El sol no permanece en silecio", explican desde la NASA. "El zumbido tenue y pulsante del latido del corazón de nuestra estrella permite a los científicos indagar en su interior, revelando las enormes corrientes de material solar en movimiento." Los datos...
Por Nacho Palou -
27 JUL 2018

El avión espacial VSS Unity hizo su tercer vuelo con motor el 26 de julio de 2018, alcanzando una altitud de 52 kilómetros y una velocidad de Mach 2,47 tras un encendido de 42 segundos de su motor cohete. Tras el...

La Agencia Espacial Europea acaba de anunciar que BepiColombo, su primera misión con destino a Mercurio, despegará del puerto espacial de Kourou a las 3:45 del 19 de octubre de 2018, hora peninsular española. Será un Ariane 5 el encargado de...

Tras varios intentos de lanzamiento que hubo que cancelar por fin el Stratos III despegaba a las 3:30 del 26 de julio de 2018, hora peninsular española. Fabricado por estudiantes de la Universidad Técnica de Delft tenía como objetivo de batir...

El tercer Falcon 9 bloque 5 de SpaceX puso en órbita el séptimo lote de satélites del sistema de comunicaciones Iridium NEXT que lanza la compañía, lo que coloca a la empresa de Elon Musk un paso más cerca de certificar...

Tara, Samuel, Anna y Ellen, los satélites número 22 al 26 del sistema de navegación europeo Galileo, ya están en órbita tras un lanzamiento por el libro a cargo de un Ariane 5 ES que despegó a las 13:25:01, hora peninsular...

Ya habíamos sacado un vídeo del intento de lanzamiento del Momo2 de Interstellar Technologies, pero en este se puede ver el piñazo a cámara lenta. El Momo2 es una versión mejorada del cohete sonda Momo de la empresa, que es una...

Vertical Landing Rockets Before SpaceX, de Curious Droid, repasa los primeros intentos "serios" por construir cohetes capaces de aterrizar en vertical, en la misma posición en la que se lanzan. Según explica el vídeo, los sistemas de lanzamiento y aterrizaje vertical...
Por Nacho Palou -
24 JUL 2018

Si se cumplen las previsiones mañana, 25 de julio de 2018, se producirán dos lanzamientos espaciales en menos de 15 minutos. Uno desde el puerto espacial de Kourou, en la Guayana Francesa; el otro desde la Base de la Fuerza Aérea...
La Agencia Espacial del Reino Unido, que es la responsable de la construcción del rover de la misión ExoMars 2020 de la Agencia Espacial Europea, acaba de lanzar una competición para escoger nombre para el vehículo. Está abierta a cualquier persona*...

Un cohete Falcon 9 bloque 5 de SpaceX despegaba del Complejo de lanzamiento 40 de Cabo Cañaveral a las 7:50, hora peninsular española, del 22 de julio de 2018 con el satélite de telecomunicaciones Telstar 19 Vantage a bordo para colocarlo...
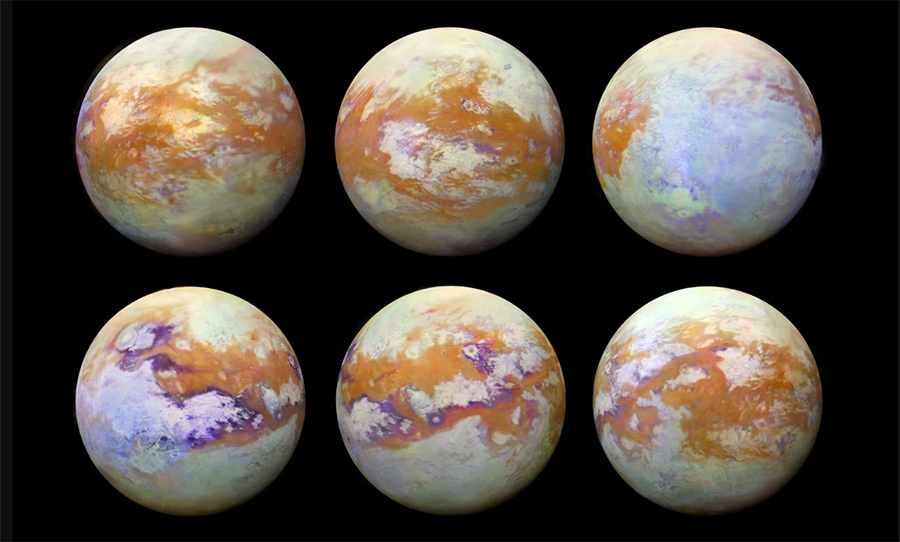
Titan desde la Cassini-Huygens / Imagen: NASA/JPL-Caltech/Univ. of Nantes/Univ. of Arizona Con imágenes obtenidas durante 13 años desde la sonda Cassini la NASA y sus colaboradores han montado y dado a conocer estas espectaculares seis imágenes de Titán, la luna más grande...
Arthur es el nombre de la primera antena de comunicaciones por satélite del mundo, situada en la Estación terrestre Goonhilly, en el Reino Unido. Project_Arthur es un proyecto diseñado para enseñar un poco e electrónica, programación, y algo de papiroflexia a...
La NASA está a un par de semanas de lanzar la Parker Solar Probe rumbo al Sol. Será la sonda que más se acerque a nuestra estrella pero va perfectamente preparada para sobrevivir a ello y no derretirse: Tiene un escudo...
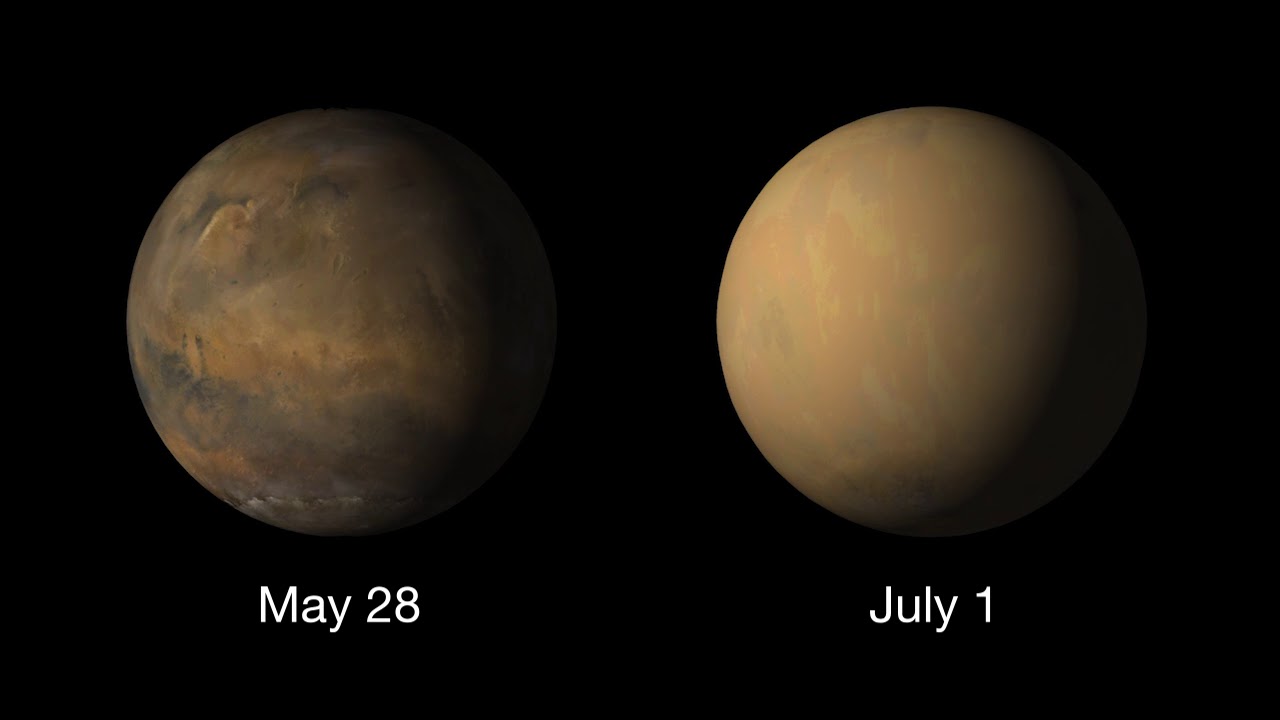
Este vídeo de la NASA compara cómo se veía marte a finales de mayo y cómo se ve actualmente a través de la cámara de la sonda MRO (Mars Reconnaissance Orbiter.) O cómo ahora no se ve un carajo de la...
Por Nacho Palou -
20 JUL 2018

A falta de los datos definitivos el noveno lanzamiento de un cohete New Shepard de Blue Origin ha sido todo un éxito. Tal y como estaba previsto la cápsula se separó del cohete como en una misión normal, pero justo después...

Blue Origin ha anunciado el que será el noveno lanzamiento de prueba de su cohete suborbital New Shepard, que en este caso tiene como objetivo comprobar a gran altura el sistema de escape de la cápsula tripulada que porta. Está previsto...

Los International Commercial Experiments, de Experimentos Comerciales Internacionales, son una de las últimas adiciones a la Estación Espacial Internacional. Instalado en el laboratorio Columbus su base está en un chásis que da soporte físico y conexiones de datos y electricidad a...

Ariane ha llevado a cabo la primera prueba de un P120C, el motor de combustible sólido que será la primera etapa de los cohetes Vega C a partir de 2019 y que también servirá como propulsor de apoyo en los Ariane...
Tras 52 días en la Estación Espacial Internacional, a la que llevó unos 3.400 kilos de suministros, equipo científico y material para experimentos, así como ni más ni menos que 15 CubeSat para ser puestos en órbita con el dispensador de...

Aparte de recuperar la primera etapa de los Falcon 9 y el Falcon Heavy otro objetivo que persigue SpaceX de cara a abaratar los lanzamientos es la de recuperar la cofia que protege a la carga útil del rozamiento con la...

La Agencia Espacial del Reino Unido acaba de anunciar que ha escogido A'Mhoine en el condado de Sutherland, en la costa norte de Escocia, para construir allí el primer espaciopuerto de varios que el país planea. Será un espaciopuerto para el...

Crew Dragon arrived in Florida this week ahead of its first flight after completing thermal vacuum and acoustic testing at @NASA’s Plum Brook Station in Ohio. https://t.co/xXJE8TjcTr pic.twitter.com/lr0P95zzIK— SpaceX (@SpaceX) 12 de julio de 2018 Tras haber superado con éxito sus pruebas...
Impresión artística de de Opportunity en Marte por Seán Doran El día 10 de julio de 2018 se cumplía un mes desde que la NASA recibiera los últimos datos de Opportunity, uno de los dos rovers que tiene en funcionamiento sobre la...
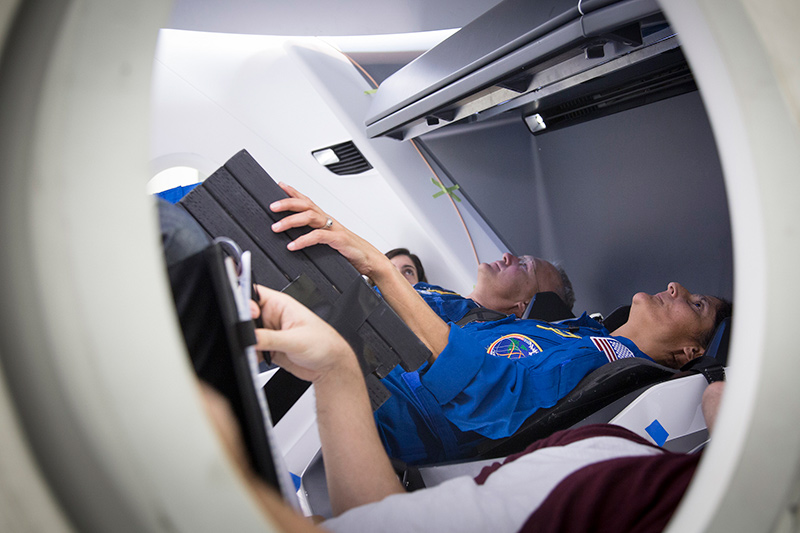
La Government Accountability Office (GAO), la agencia que evalúa y audita en qué se gasta los cuartos el gobierno de EE UU, ha emitido una advertencia a la NASA por el actual riesgo de quedarse sin capacidad para enviar hombres al...
Por Nacho Palou -
12 JUL 2018

El simpático señor que cuenta su historia en este vídeo de Spectrum no es otro que Don Eyles «The Ey», más conocido como «el programador que salvó la misión del Apolo 14 con 65 pulsaciones de teclado». En Rolling Strone publicaron...

Aunque la Estación Espacial Internacional está técnicamente en el espacio porque orbita la Tierra bastante por encima de los 100 kilómetros de la línea de Kármán que marcan el límite entre atmósfera y espacio exterior no está tan en el espacio...

Durante el gran final de la sonda Cassini —destruyéndose en la atmósfera de Saturno en septiembre de 2017— la sonda grabó esta especie de conversación entre el planeta Saturno y su luna Encélado. Lo que Cassini detectó entonces fueron ondas electromagnéticas...
Por Nacho Palou -
11 JUL 2018

Un cohete Larga Marcha 3A que despegó a las 22:58, hora peninsular española, del 9 de julio de 2018 del Centro de lanzamiento de satélites de Xichang con un satélite Beidou-2 del sistema de navegación chino se ha convertido en el...
A principios de 2018 la NASA anunciaba que al telescopio espacial Kepler se le estaba acabando el tiempo porque se le está terminando el combustible que necesita para maniobrar y apuntar a la Tierra para transmitir los datos que recoge. Y...

El pasado 2 de junio una cámara de seguridad (vídeo de arriba) grabó la entrada en la atmósfera terrestre del asteroide ZLAF9B2, que tenía entre 3 y 5 metros de diámetro. El asteroide no se detecto hasta unas ocho horas antes...
Por Nacho Palou -
10 JUL 2018

La Progress MS-09 atracaba en el módulo Pirs de la Estación Espacial Internacional a las 3:31, hora peninsular española, del 10 de julio de 2018 tras haber despegado del cosmódromo de Baikonur a las 23:51 del día 9. Esto son 3...

El satélite medioambiental Aeolus de la Agencia Espacial Europea, que ha cruzado el Atlántico desde Francia en barco en lugar de viajar en avión para proteger su instrumento de posibles cambios repentinos de presión que lo afectarían, está ya en el...

Todavía no existe → Esta propuesta para Lego Ideas presentada por Valerie Roche y Matthew Nolan es un set completo de los vehículos espaciales de SpaceX — incluyendo el Tesla Roadster rojo personal de Musk con Starman al volante. Lego Ideas es...
Por Nacho Palou -
9 JUL 2018

Todo está listo en la plataforma 31/6 del Cosmódromo de Baikonur para el lanzamiento de la cápsula de carga Progress MS-09 rumbo a la Estación Espacial Internacional con 2.450 kilos de carga a bordo. Incluyen comida, combustible, y otros suministros como...

Mars vanishes beneath the dust blanket! This animation created from my June 28th image and reference MGS map of the exact same longitude really shows what has happened on Mars in recent weeks! Thanks to @Tom_Ruen for the map link. pic.twitter.com/ETVIhjYcB5— Damian...
La Agencia India de Investigación Espacial, ISRO por su siglas en inglés, ha dado un importante paso adelante con la primera de las cinco pruebas previstas del sistema de escape de su futura cápsula tripulada. En este caso estaban simulando un...

Al mismo tiempo que SpaceX está «torturando» una cápsula tripulada Crew Dragon en el interior de la Space Power Facility para comprobar que sus sistemas pueden soportar los rigores del espacio está haciendo pruebas del sistema de paracaídas con un modelo...
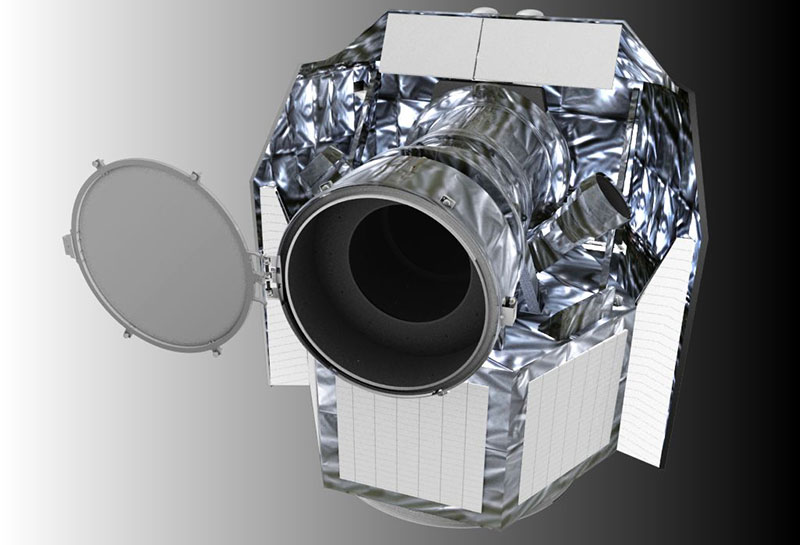
Airbus ha terminado de ensamblar el observatorio espacial Cheops, lo que básicamente consiste en unir su carga útil –en este caso un telescopio Ritchey-Chrétien de 30 cm de apertura y 1,2 m de longitud– con el bus de la nave, la...

Ricky Arnold y Drew Feustel, controlando el brazo robot de la Estación Espacial Internacional, capturaron la cápsula de carga Dragon 15 a las 12:54, hora peninsular española, del 2 de julio de 2018, apenas dos días después de su lanzamiento. Y...

El instrumento Sphere empleado por el VLT (Very Large Telescope del ESO) ha capturado esta imagen en la que se puede ver un planeta formándose de una nube de polvo alrededor de una estrella joven — en un disco de transición,...
Por Nacho Palou -
2 JUL 2018

El cohete japonés MOMO-2 de Interstellar Technologies sufrió una aparatosa explosión a los pocos segundos del despegue, cuando el motor principal se paró súbitamente y aquello ya no tiraba. Las caras de desolación del final del vídeo son todo un poema....

El lanzamiento de la cápsula de carga Dragon CRS-15 es, si los wikipedistas no llevan mal las cuentas, el lanzamiento orbital número 55 llevado a cabo en la primera mitad de 2018. En total estos lanzamientos han puesto en órbita o...
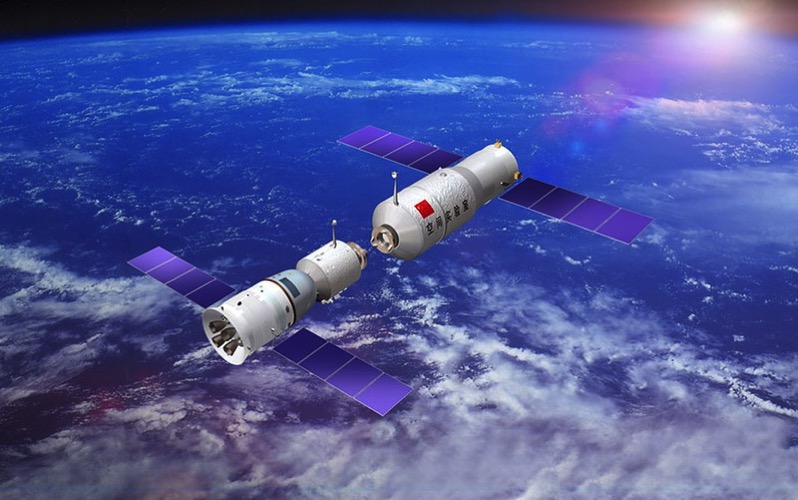
Lanzado en septiembre de 2016 el laboratorio espacial Tiangong 2 tenía dos objetivos muy claros: probar los sistemas de soporte vital y los de repostaje de la futura estación espacial china, cuyo primer módulo está previsto que sea lanzado en 2020....

Tal y como estaba previsto la Dragon CRS-15 despegaba del Complejo de lanzamiento 40 de la Estación de la Fuerza Aérea de Cabo Cañaveral a las 11:41 del 29 de junio de 2018 rumbo a la Estación Espacial Internacional con 2.410...

Me ha llamado la atención descubrir que las mantas térmicas que van a ayudar a proteger a los módulos de la misión BepiColombo a Mercurio de la Agencia Espacial Europea y de la Agencia Japonesa de Exploración Aeroespacial se cosen a...

La gente de AstroReality, la compañía que fabrica detalladas reproducciones a escala de la superficie de la Luna (Lunar Pro), ha ampliado el catálogo a todos los planetas del Sistem Solar —‘a todos’ incluyendo Plutón— aunque por ahora sólo en la...
Por Nacho Palou -
29 JUN 2018
Rocket Lab ha decidido posponer indefinidamente el lanzamiento de su primera misión comercial tras haber obtenido de nuevo lecturas extrañas por parte del controlador del motor del cohete Electron bautizado como It's business time. Este tipo de lecturas ya les habían...

Todo está listo en el Complejo de lanzamiento 40 de la Estación de la Fuerza Aérea de Cabo Cañaveral para el lanzamiento de la cápsula de carga Dragon 15 rumbo a la Estación Espacial Internacional. Lleva a bordo 2.410 kilos de...

Aunque los humanos somos tirando a guarretes con nuestro planeta tenemos bastante consideración a la hora de enviar cacharros a otros planetas o lunas en los que existe la remotísima posibilidad de que haya habido vida en el pasado o incluso...
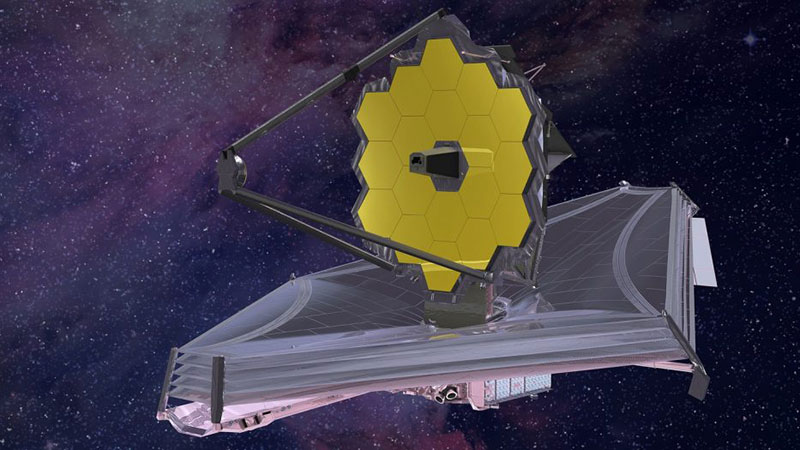
Pues poco ha tardado la NASA en volver a retrasar el lanzamiento del Telescopio espacial James Webb. Ya no va a ser mayo de 2020, como había anunciado en marzo de este mismo año, sino que ahora será, si no se...

Tras tres años y medio de viaje la sonda Hayabusa 2 de la Agencia Japonesa de Exploración Aeroespacial ha llegado al asteroide 162173 Ryugu. Está en lo que la JAXA denomina como home, una posición a 20 kilómetros del asteroide. Ryugu...

Las dunas de arena a menudo se acumulan en el suelo de los cráteres, como esta fotografiada en la región del Cráter Lyot por la sonda Mars Reconnaissance Orbiter (MRO) de la NASA el 24 de enero de 2018. "Al sur...
Por Nacho Palou -
27 JUN 2018
Primero un equipo de comunicaciones que decidió no funcionar obligó a cancelar el primer intento de lanzamiento del It's Business Time, el cohete Electron que tiene que llevar a cabo la primera misión comercial de la empresa neozelandesa Rocket Lab. Y...

Un cohete Larga Marcha 2C que despegó a las 5:30 del 27 de junio de 2018, hora peninsular española, dos satélites «identificados» como pruebas de nuevas tecnologías A y B como carga útil. Su objetivo es hacer pruebas de comunicaciones en...
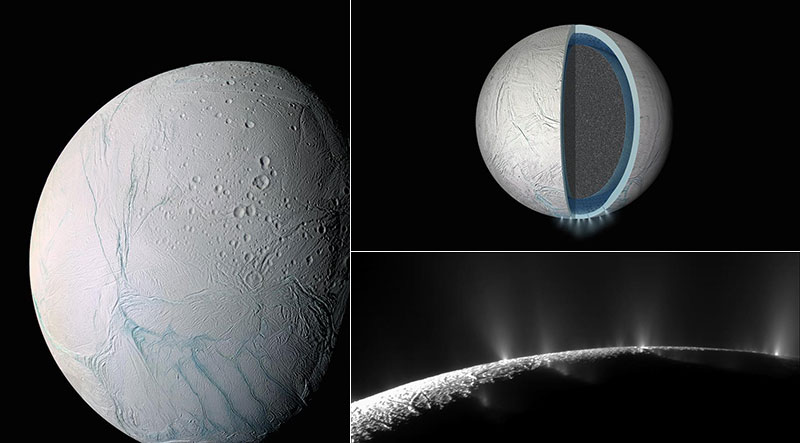
Encélado, la sexta luna más grande de Saturno, es una de los más intrigantes, en especial desde que gracias a la sonda Cassini sabemos que está cubierta por un océano líquido bajo una capa exterior helada. QUién sabe lo que puede...

El 12 de octubre de 2018 está previsto el estreno de El primer hombre, una película sobre la misión Apolo 11, que nos llevó por primera vez a la Luna, centrada en Neil Armstrong y el periodo comprendido entre los años...

Gracias a un par de GoPro instaladas en el interior de la Soyuz MS-09 por primera vez tenemos imágenes en alta definición del interior de una de estas cápsulas tripuladas durante el despegue y hasta el momento en el que entra...
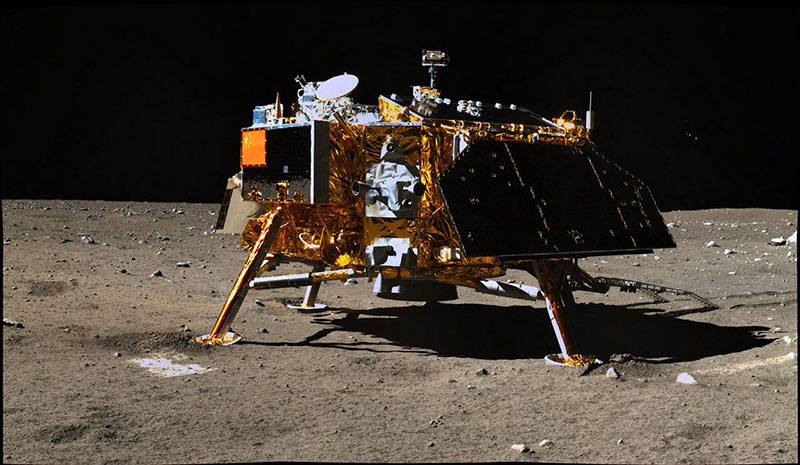
Aunque la Administración Espacial Nacional China (CNSA) ya no le hace mucho caso porque está centrada en sus sucesoras el aterrizador de la misión Chang'e-3 aún sigue transmitiendo desde la Luna, cuatro años y medio después de haber aterrizado allí. De...

A lo mejor en el futuro inventamos una pastilla para que a las personas que estén en el espacio deje de crecerles el pelo… pero mientras tanto durante las misiones de larga duración lo habitual es que se lo corten de...

Aunque a veces lo olvidemos porque casi todas las semanas hay algún lanzamiento espacial y porque desde el 2 de noviembre de 2000 ha habido seres humanos viviendo en el espacio sin interrupción las misiones espaciales son complejas, peligrosas, y con poco...

La primera Crew Dragon, la versión tripulada de la cápsula de carga Dragon de SpaceX, también conocida como Dragon 2, está ya en la cámara térmica de la Estación de Campo Plum Brook, que depende Centro de investigación Glenn de la...
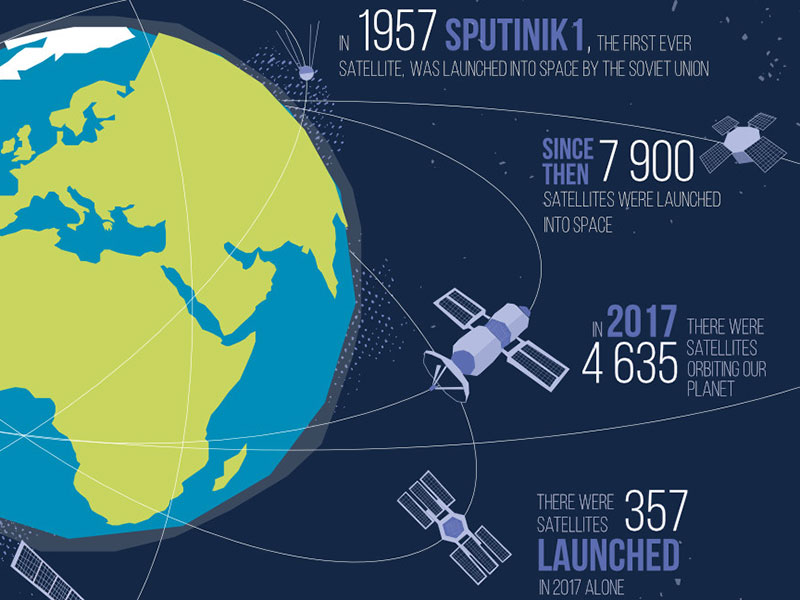
Desde que el 4 de octubre de 1957 la URSS pusiera en órbita el Sputnik y hasta 2017 hemos puesto en órbita alrededor de nuestro planeta unos 7.900 satélites. De ellos 4.635 seguían en órbita alrededor de nuestro planeta, aunque tan...

Un problema con el equipo de seguimiento instalado en las islas Chatham impidió el lanzamiento del It's business time en la madrugada del 23 de junio de 2018, momento en el que se abría la ventana de lanzamiento. Y es que...

Todo está preparado en las instalaciones de Rocket Lab en Nueva Zelanda para el lanzamiento de la primera misión comercial de un cohete Electron. Bautizado como It's business time pondrá en órbita dos Lemur-2; un satélite de GeoOptics Inc.; NABEO, un...
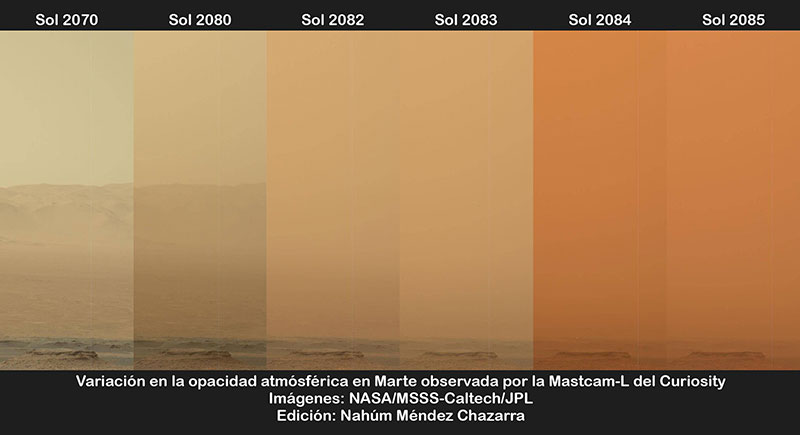
Según cuenta la NASA en Martian Dust Storm Grows Global: Curiosity Captures Photos of Thickening Haze la tormenta de polvo que tiene a Opportunity en la oscuridad ya se considera global. De hecho Curiosity, que está en el otro lado del...
Lo habitual es que cuando un satélite artificial está listo para ser enviado al lugar desde el que va a ser lanzado el transporte se haga en avión, por aquello de que es el método de transporte más seguro y, además,...

Enviado a la Estación Espacial Internacional en la cápsula de carga Dragon 14 el microsatélite RemoveDEBRIS, un satélite experimental para probar técnicas de eliminación de basura espacial, ya ha sido puesto en órbita. Para ello ha sido sacado al exterior desde...
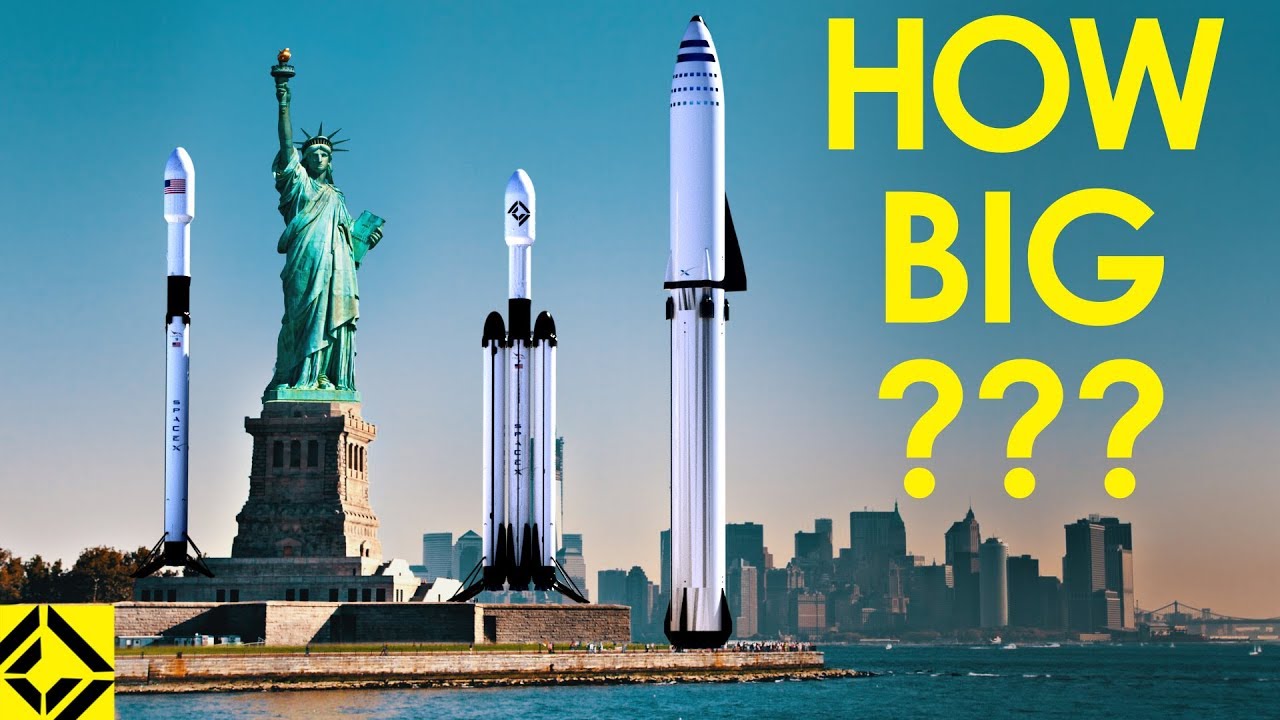
SpaceX nos tiene tan acostumbrados a recuperar las primeras etapas de sus cohetes que casi están consiguiendo que nos parezca algo fácil. Pero por supuesto dista mucho de serlo, aunque sólo sea por las dimensiones de los cohetes.De hecho lo que...

Los artesanos de MoonGlobes han creado esta impresionante y realista reproducción a escala de la Luna con lo más avanzado de la tecnología –imágenes y datos de telemetría reproducidos mediante láser– y lo mejor del proceso artesanal: está pintada a mano....
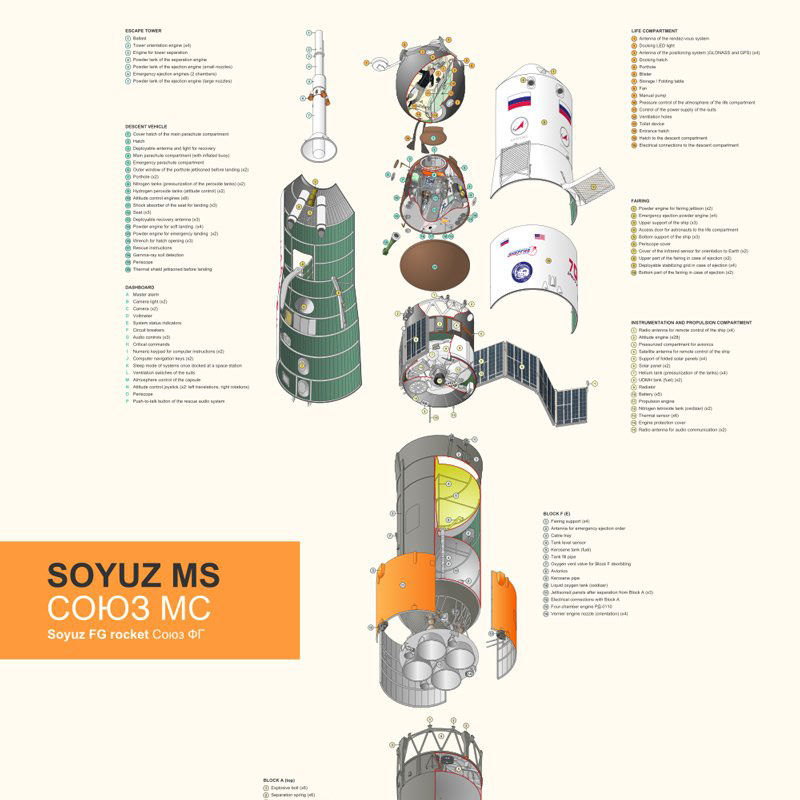
Nueve meses de preparación, 700 imágenes como documentación y 200 horas de trabajo son el origen de esta ilustración en formato SVG con más de 9.000 elementos que ha creado @AstroBidules y que ha subido a la Wikipedia con licencia CC....

A partir de los datos e imágenes reales obtenidas por la cámara HiRISE (High-Resolution Imaging Science Experiment) a bordo de la sonda Mars Reconnaissance Orbiter de la NASA, el artista Seán Doran ha producido esta aimación que permite "sobrevolar" Marte. "La...
Por Nacho Palou -
19 JUN 2018
Hemos hablado en varias ocasiones del Lunar Orbiter Image Recovery Project (Proyecto de Recuperación de Imágenes de los Lunar Orbiter, LOIRP). Es una iniciativa que tiene como objetivo rescatar las imágenes tomadas por las cinco sondas de la serie Lunar Orbiter...
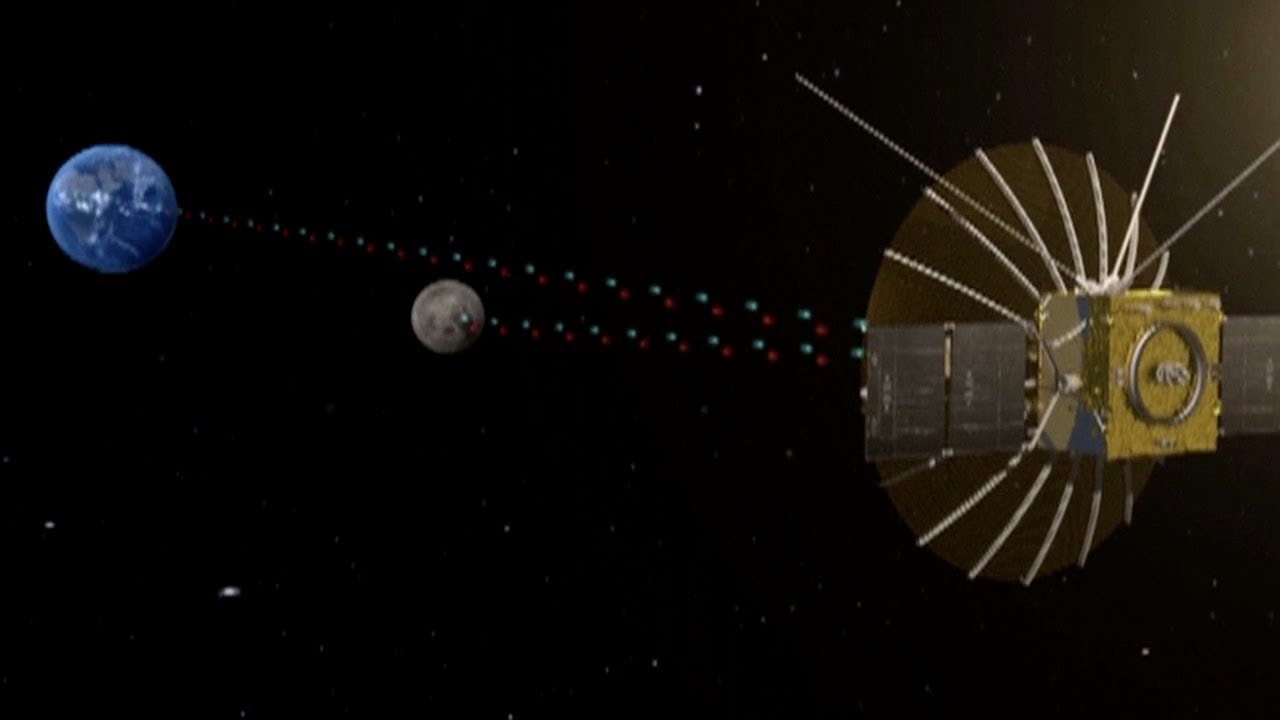
La Administración Espacial Nacional China (CNSA) ha confirmado la llegada a su órbita de trabajo de Queqiao, el satélite que hará de relé de comunicaciones entre el control de la misión y el aterrizador y el rover de la misión Chang'e-4...

It’s been the greatest honor to live out my lifelong dream of being a @NASA Astronaut. Thank you to the #NASAVillage and all who have supported me along the way. As I reminisce on my many treasured memories, it’s safe to say...
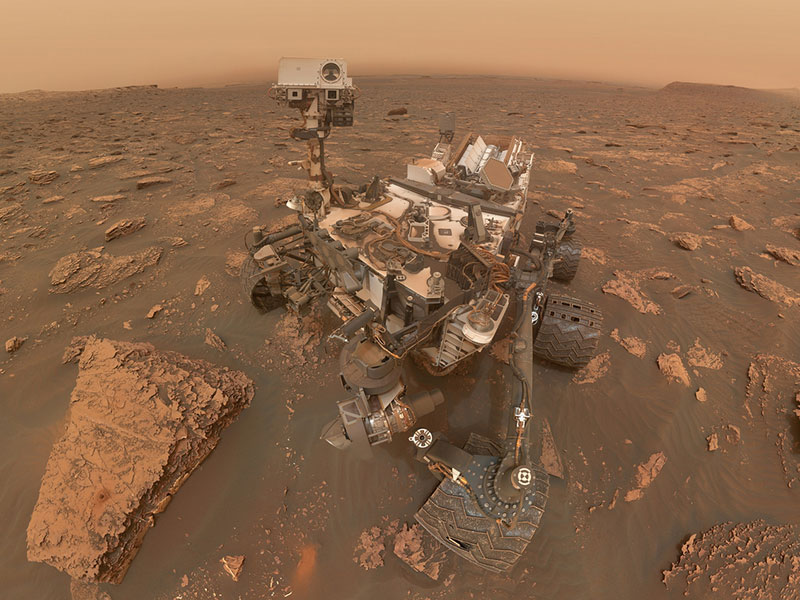
Mientras esperamos a ver qué pasa con Opportunity, ahora mismo «enterrado» por una tormenta de polvo que cubre la cuarta parte de la superficie de Marte pero que muy bien podría convertirse en una tormenta global, su hermano pequeño Curiosity acaba...

Ryugu's rotation as seen by @haya2e_jaxa from a distance of about 700km#Hayabusa2 #Ryugu pic.twitter.com/YWT5vtBYbt— Roman Tkachenko (@_RomanTkachenko) 16 de junio de 2018 A la sonda Hayabusa 2 de la Agencia Japonesa de Exploración Aeroespacial, lanzada el 3 de diciembre de 2014, le...
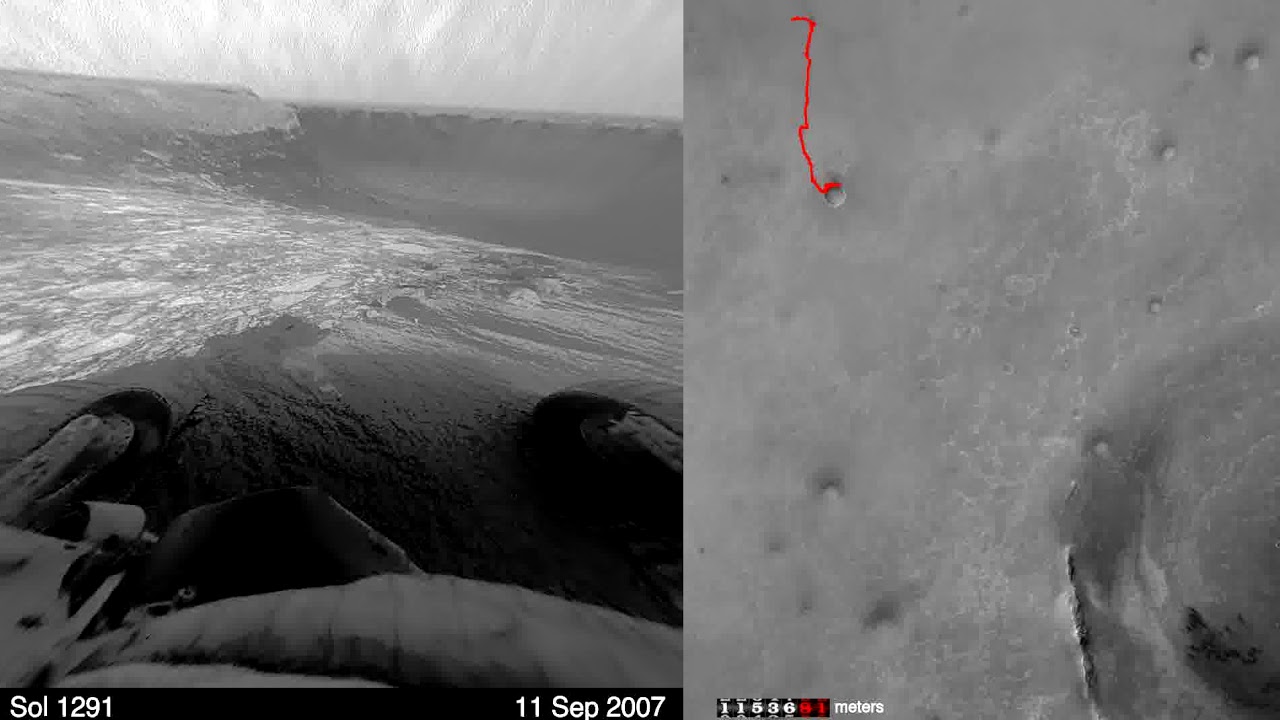
Mientras esperamos noticias de Opportunity, que está intentando sobrevivir a la mayor tormenta de polvo a la que haya tenido que enfrentarse, Paolo Belluta, uno de sus conductores, ha publicado este vídeo que recoge los algo más de 45 kilómetros que...
El libro Nasa Saturn V Owners' Workshop Manual: 1967-1973 es como los habituales manuales de taller para coches de Hynes pero para el cohete Saturno V. También hay ediciones para el Shuttle, el Apolo 11 o las cápsulas Soyuz o Mercury....
Por Nacho Palou -
16 JUN 2018

Imágenes de radiotelescopio de una estrella destruida por un agujero negro supermasivo en el par de galaxias Arp 299. El chorro son partículas que se mueven hacia afuera del agujero negro. Astrónomos del Instituto de Astrofísica de Andalucía han podido observar, por...
Por Nacho Palou -
15 JUN 2018
Impresión artística de de Opportunity en Marte por Seán Doran En estos momentos hay una tormenta de polvo sobre Marte que cubre la cuarta parte de la superficie del planeta pero que amenaza con convertirse en una tormenta global. Las sondas que...
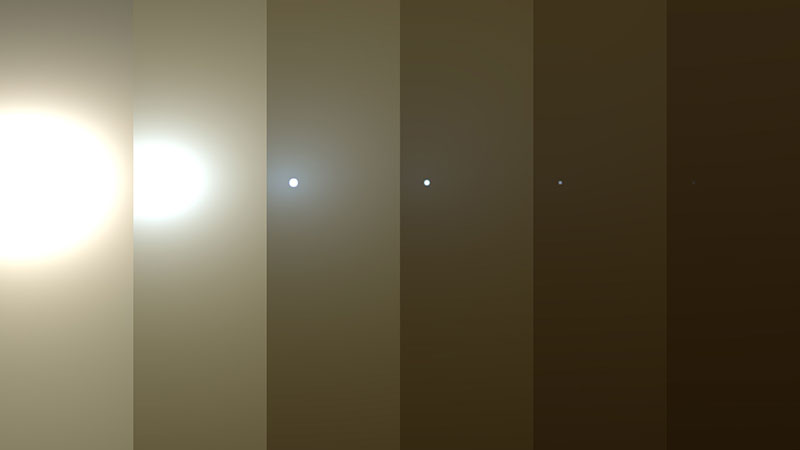
Según se puede leer en Opportunity Hunkers Down During Dust Storm la NASA no ha vuelto a recibir señales de Opportuniy desde el domingo 10 de junio. El equipo de la misión asume que debido a la enorme tormenta de polvo...

Este astronauta a punto de ponerse a zurcir su traje espacial dibujado por el artista irlandés Shane Sutton ha sido el ganador de Graffiti Without Gravity, un concurso convocado por la Agencia Espacial Europea, en colaboración con The Hague Street Art...

Dados los progresos en los vuelos de prueba que ha llevado a cabo con la versión de carga del avión espacial Dream Chaser, Sierra Nevada Corporation ha recibido la aprobación por parte de la NASA para un primer lanzamiento a finales...
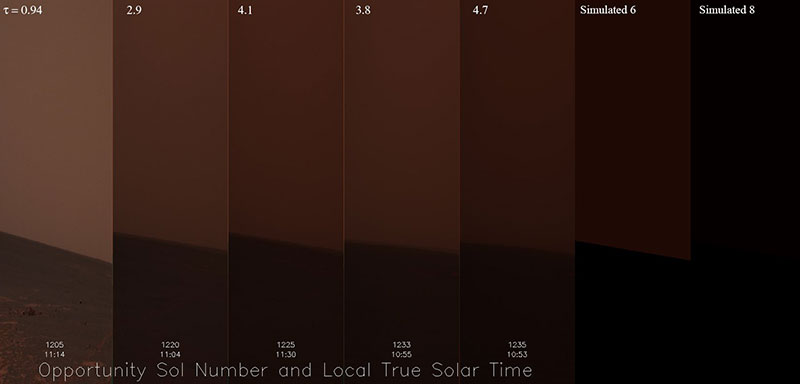
El equipo de Opportunity está pasando horas de angustia debido a una enorme tormenta de polvo –tiene una superficie más grande que la de los Estados Unidos– que tiene al rover sumido en la oscuridad, lo que es todo un problema...

En los años de 1970 los científicos detectaron un inesperado aumentado temporal de la temperatura en el subsuelo de la Luna a través de unos sensores dejados en el satélite durante las misiones Apolo 15 (1971) y Apolo 17 (1972). Los...
Por Nacho Palou -
11 JUN 2018

Tras la aprobación por parte de sus respectivas juntas de accionistas y con el visto bueno de la Comisión Federal de Comercio la empresa Northrop Grumman, una de las de toda la vida de la industria aeroespacial, ha adquirido Orbital ATK,...
En la madrugada del 5 de julio de 2016 la sonda Juno de la NASA efectuaba sin problemas la maniobra de inserción orbital que la colocó en órbita alrededor de Júpiter. Esta maniobra la dejó en una órbita de captura inicial...
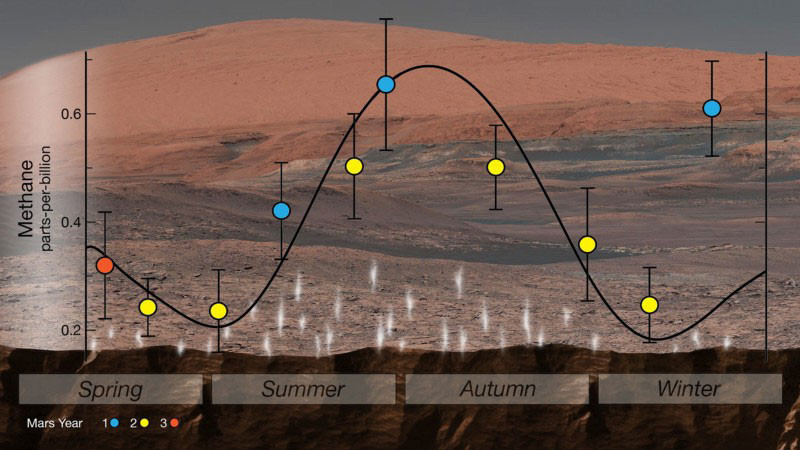
La NASA lo ha vuelto a hacer –aunque con menos exageración que en ocasiones anteriores, todo hay que decirlo– al presentar los resultados de los dos últimos trabajos publicados con datos obtenidos por el rover marciano Curiosity. De NASA Finds Ancient...
![imagen]()
Con la llegada de Alexander Gerst a la Estación Espacial Internacional el 8 de junio de 2018 ha dado comienzo la misión Horizons de la Agencia Espacial Europea. Horizons (Horizontes) toma ese nombre como representación de lo desconocido y lo que...

Allá por 2001 Rusia estaba estudiando el desarrollo de una primera etapa reutilizable para los cohetes Angara. Bautizada como Baikal tenía un ala que al despegar iba paralela al cuerpo del cohete pero que para la maniobra de vuelta a tierra se...
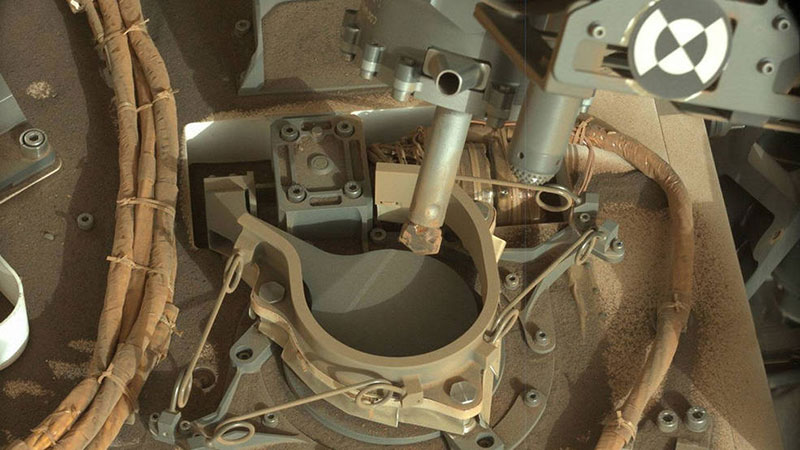
El 1 de diciembre de 2016 el taladro del rover Curiosity que la NASA tiene en Marte empezó a dar problemas para extenderse, problemas que fueron yendo a peor hasta que en marzo de 2017 quedó permanentemente extendido. En esta configuración...

Fistful of Stars es un trabajo de Eliza McNitt que se presentó en el SXSW en colaboración con National Sawdust, realizada con imágenes del telescopio Hubble de la NASA. La principal protagonista del vídeo es la nebulosa de Orión y explica...

Tal y como estaba previsto la Soyuz MS-09 despegaba a las 13:12 del 6 de junio de 2018, hora peninsular española, rumbo a la Estación Espacial Internacional. A bordo iban Sergei Prokopyev de Roscosmos, Alexander Gerst de la Agencia Espacial Europea,...
El bastidor que permitirá funcionar a los Ice Cubes acaba de ser instalado en uno de los racks del laboratorio Columbus de la Estación Espacial Internacional tras haber llegado allí a bordo de la cápsula de carga Cygnus OA-9. Los Ice...

Todo está preparado en el cosmódromo de Baikonur para el despegue de la Soyuz MS-09 rumbo a la Estación Espacial Internacional a las 13:12, hora peninsular española, del 6 de junio de 2018. A bordo irán Sergei Prokopyev de Roscosmos, Alexander...
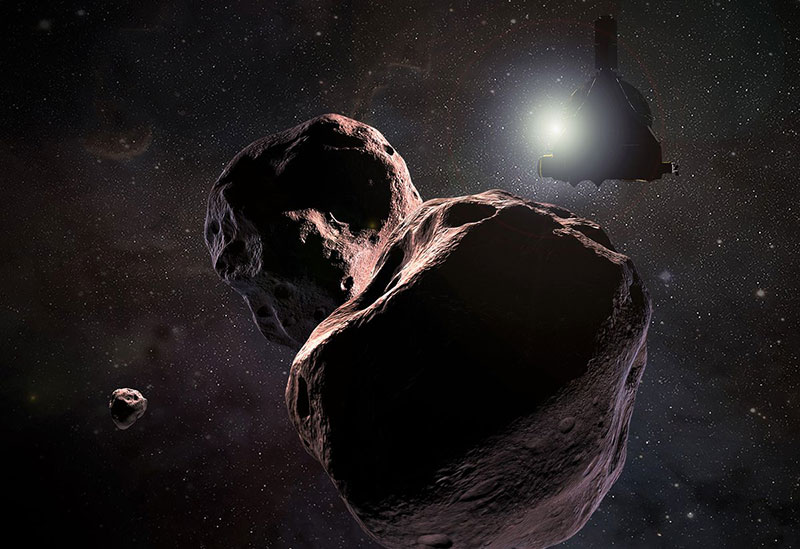
Una vez completado con éxito su sobrevuelo de Plutón en julio de 2015 el equipo de la sonda New Horizons, una sonda espacial con corazón de videoconsola, propuso una misión extendida aprovechando que todos los sistemas de a bordo funcionan a...
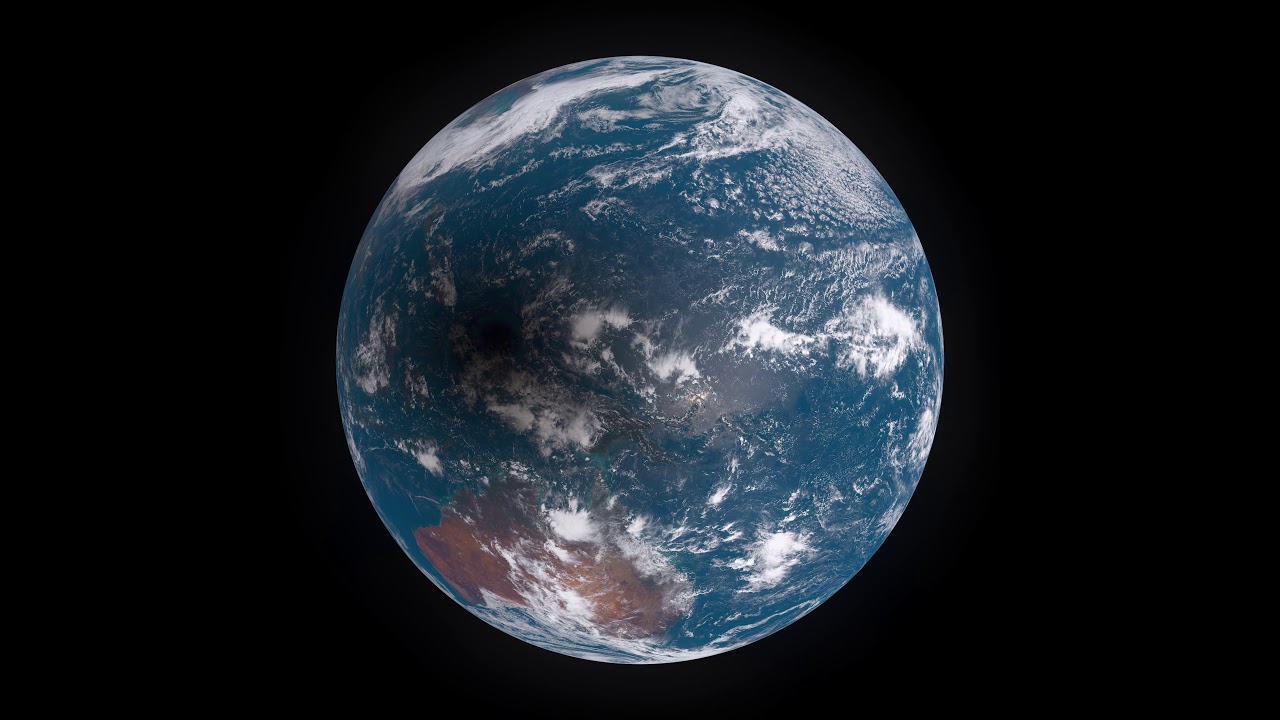
Una delas grandes ventajas de que cada vez haya más datos disponibles públicamente de todo tipo de satélites y sondas espaciales es que aficionados de todo el mundo pueden jugar con ellos y en algunos casos hacer verdaderas maravillas. Uno de...

Ahora que SpaceX tiene controladísimo lo de recuperar la primera etapa de sus cohetes está intentando ir un paso más allá con la recuperación de las cofias que protegen la carga útil durante los primeros minutos del lanzamiento. La cofia es...

Otro lanzamiento con éxito para SpaceX, uno de cuyos Falcon 9 colocaba en órbita de transferencia geoestacionaria al satélite de telecomunicaciones SES-12 en la madrugada del 4 de junio de 2018, hora peninsular española. El el sexto lanzamiento de un satélite...

Todo está listo en el Complejo 40 de lanzamientos espaciales (SLC-40) at de la Base de la Fuerza Aérea de Cabo Cañaveral para el lanzamiento del satélite de telecomunicaciones SES-12 por parte de un Falcon 9 de SpaceX. Se trata de...

Un «suave» aterrizaje a las 14:39 del 3 de junio de 2018, hora peninsular española, ponía fin a la misión de la cápsula tripulada Soyuz MS-07, a bordo de la que volvían de la Estación Espacial Internacional Anton Shkaplerov de Roscosmos,...
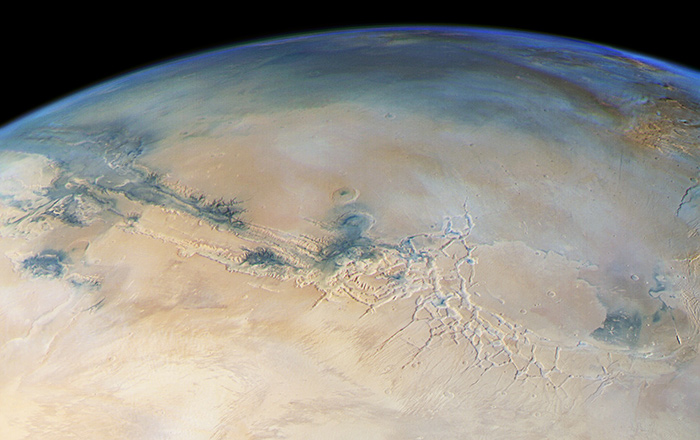
La región del Valles Marineris, en Marte. Imagen: ESA/DLR/FU Berlin. Esto es sólo un fragmento de una imagen publicada recientemente por la Agencia Espacial Europea capturada con la HRSC (High Resolution Stereo Camera) de la Mars Express, el 12 de octubre de...
Por Nacho Palou -
2 JUN 2018
En octubre de 1994 al astronauta Michael «Rich» Clifford le tocaba pasar su revisión médica anual. Al terminar, en principio con todos los resultados correctos, incluyendo los neurológicos, le pidió al médico que lo estaba examinando que le echara un ojo...
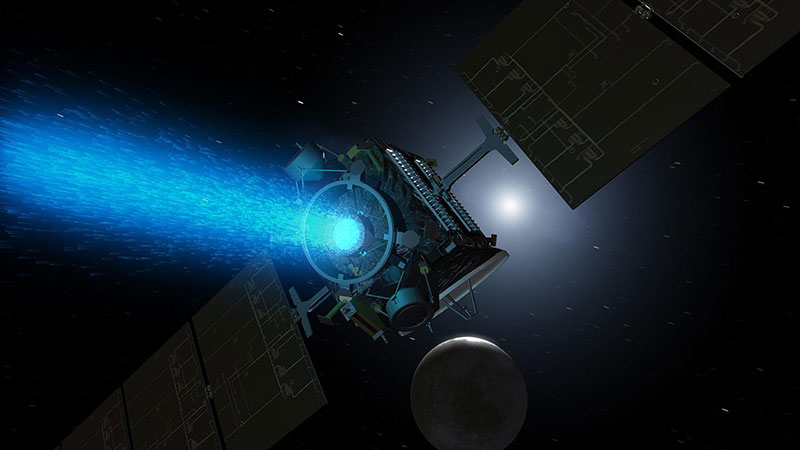
La sonda Dawn de la NASA lleva en órbita alrededor de Ceres desde marzo de 2015 y dado que sigue funcionando perfectamente la agencia ha extendido la misión en dos ocasiones. La última de estas extensiones fue anunciada en octubre de...

Allá por 2015 las autoridades chinas decidieron permitir la entrada de capital privado en el sector espacial así como impulsar el que la industria de defensa desarrollara tecnologías que se pudieran transferir a su uso civil. Y fruto de eso varias...

Menos de dos meses después de su primer vuelo con motor el segundo SpaceShipTwo de Virgin Galactic ha hecho su segundo vuelo supersónico. De nuevo ha sido un encendido del motor cohete corto, de tan sólo 31 segundos, que ha llevado...
Airbus, el principal contratista del rover de la misión ExoMars 2020 de la Agencia Espacial Europea, tiene todo listo para empezar a comprobar que el vehículo es capaz de sobrevivir a los rigores del lanzamiento, la llegada a Marte, y el...

Hace un par de meses publicamos un vídeo acerca de cómo SpaceX graba los lanzamientos de sus cohetes. No es una tarea sencilla, ni mucho menos, aunque lo cierto es que ellos cuentan con la experiencia acumulada de unos 70 años...
Ya ha habido entrenamientos conjuntos de astronautas chinos y de la Agencia Espacial Europea, así que el anuncio no es una sorpresa total, pero está bien que las autoridades chinas hayan confirmado que cualquier país miembro de las Naciones Unidas podrá...
Alan Bean, piloto del módulo lunar de la misión Apolo 12, y por tanto la cuarta persona en pisar la Luna, moría el pasado 26 de mayo de 2018 a los 86 años de edad. Bean, ingeniero aeronáutico y piloto de...

En los Estados Unidos cada vez hay más empresas privadas intentando hacerse un hueco en la industria de los lanzamientos espaciales. Quizás no haya sitio para todas, y sus modelos de negocio tendrán que demostrar si lo hay o no. Pero...
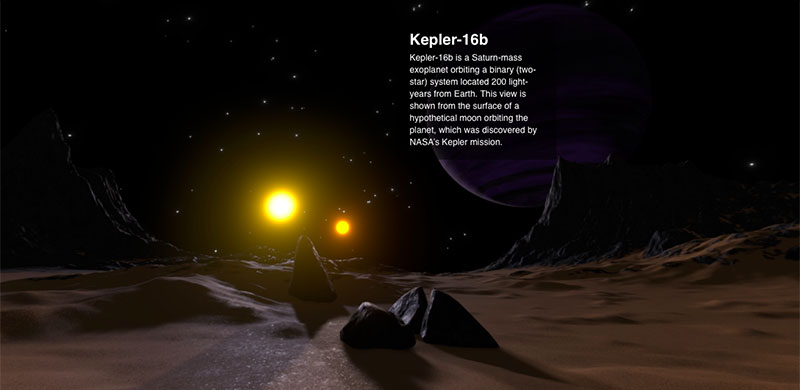
La agencia de turismo a planetas extrasolares de la NASA propone llevarnos de visita –por ahora virtual, claro– a la superficie de algunos de los planetas extrasolares que conocemos. TRAPPIST-1e, Kepler-16b, y Kepler-186f son algunos de los primeros destinos. Una vez...

Welcome to @Space_Station #Cygnus! pic.twitter.com/YykgziRTyC— Ricky Arnold (@astro_ricky) 24 de mayo de 2018 Manejado desde tierra el Canadarm-2, el brazo robot de la Estación Espacial Internacional, capturó la cápsula de carga Cygnus OA-9E «S.S. J.R. Thompson» a las 11:26 y la acopló...
El servicio postal de los Estados Unidos acaba de sacar un sello dedicado a Sally Ride, la primera astronauta estadounidense, quien despegó en su primera misión el 18 de junio de 1983, veinte años después de Valentina Tereshkova. Fue la tercera...

La idea de un grupo de investigadores escoceses y ucranianos consiste en construir un cohete de combustible sólido que se consuma físicamente durante el ascenso. El cohete “autofágico” todavía está en las primeras fases de desarrollo, pero “la idea funciona”, según...
Por Nacho Palou -
24 MAY 2018
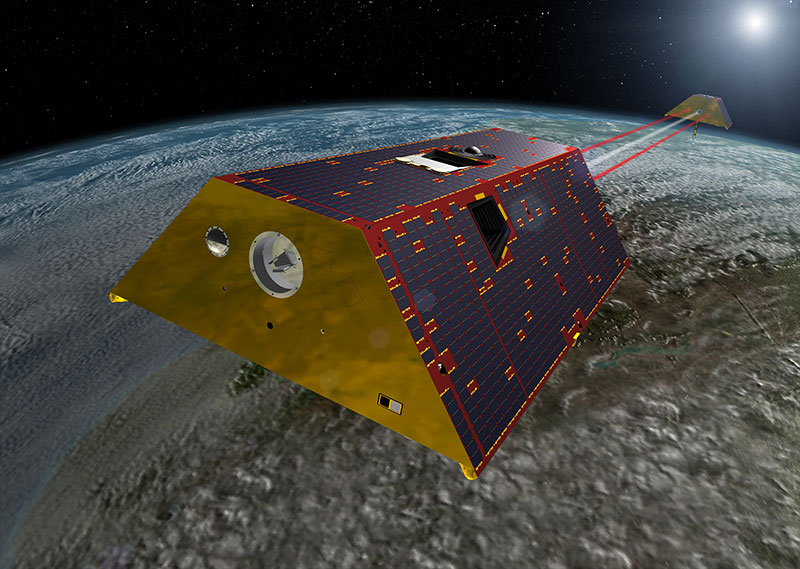
Artist's animation of the #GRACEFO separation... pic.twitter.com/F2QTLEnB2H— NASA Earth (@NASAEarth) 22 de mayo de 2018 Tras su lanzamiento a bordo de un Falcon 9 los dos satélites de la misión Grace-FO ya están en órbita y en comunicación con el control de...
![imagen]()
SpaceX tiene todo listo en el complejo de lanzamiento 4E de la Base de las Fuerzas Aéreas de Vandenberg para el lanzamiento de cinco nuevos satélites Iridium-Next y de los dos satélites de la misión Grace-FO. Se trata de los Iridium-Next...

The journey to Pluto, the farthest world ever explored de Alan Stern es un vídeo de TEDEd que resume en poco más de cinco minutos la misión New Horizons de la NASA. La sonda New Horizons ostenta el título de ser...
Por Nacho Palou -
22 MAY 2018

Unas tormentas con aparato eléctrico estuvieron a punto de dar al traste con el lanzamiento de la cápsula de carga Cygnus OA-9E rumbo a la Estación Espacial Internacional, pero gracias a la ventana de cinco minutos fue posible retrasarlo lo suficiente...

Tal y como estaba previsto Queqiao, el satélite que hará de relé de comunicaciones para la misión Chang'e-4 al lado oculto de la Luna, despegaba desde el Centro de lanzamiento de satélites de Xichang en un cohete Larga Marcha 4C a...

Timelapse of the #OA9 #Antares carrying the S.S. J.R. Thompson #Cygnus going vertical at @NASA_Wallops last night. We are on track for launch on Monday with the 5-minute window opening at 4:39 a.m. EDT/8:39 a.m. UTC! pic.twitter.com/EOGlI1by51— Orbital ATK (@OrbitalATK) 19 de...
Una de las misiones espaciales más ambiciosas que prevé lanzar China en 2018 es la Chang'e-4, que tiene como objetivo colocar un aterizador y un rover en el lado oculto de la Luna, algo que será la primera vez que hagamos. Pero...
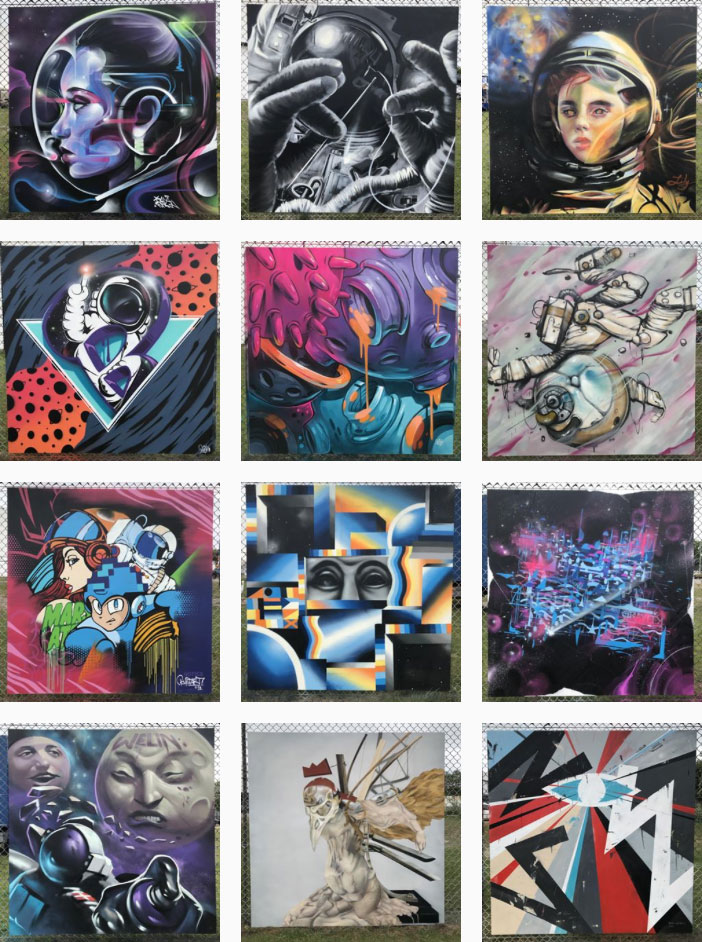
El 18 de mayo de 2018 doce artistas urbanos europeos participaron en el evento Graffiti without gravity, organizado por la Agencia Espacial Europea y The Hague Street Art. Cada uno dispuso de un lienzo de 2×2 metros en el que crear una...

Como casi cualquier misión espacial que tiene oportunidad de hacerlo los MarCO de la NASA ya le han hecho una foto a la Tierra. De hecho en la primera imagen tomada por MarsCO-B, también conocido como Wall-E, la Tierra y la...
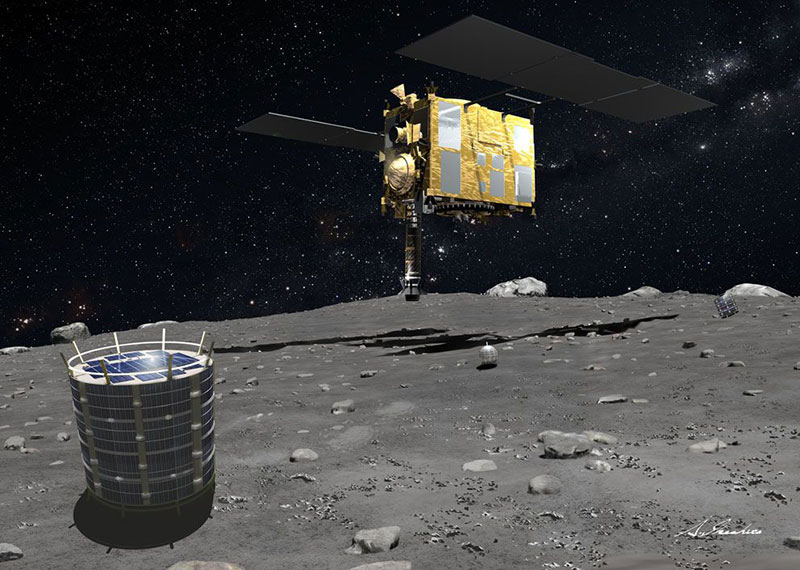
Los seguidores de estrellas de la sonda Hayabusa 2 de la Agencia Japonesa de Exploración Aeroespacial ya son capaces de tomar imágenes de Ryuugu, el asteroide hacia el que se dirige. Normalmente se usan para establecer la posición de una nave...
El 17 de mayo de 1968 un cohete Scout B lanzado desde el Complejo de lanzamiento 5 de la Base aérea de Vandenberg ponía en órbita el ESRO 2B. Fue el primer satélite de la Organización Europea para la Investigación Espacial,...

Acaba de morir el escritor y periodista estadounidense Tom Wolfe, autor de Lo que hay que tener, subtitulado Elegidos para la gloria, un magnífico libro que relata los primeros tiempos del programa espacial tripulado estadounidense, justo hasta el final del programa...

Project Mars es un concurso de la NASA dirigido a nuevos talentos en el mundo de la animación y el diseño gráfico que busca la creación de un corto –hasta 5 minutos– y un póster que cuenten la historia de la exploración...

Todos los espaciotrastornados nos quedamos con ganas de más después del espectacular primer lanzamiento de un Falcon Heavy, en especial después de ver cómo los dos cuerpos laterales del cohete aterrizaban de forma casi sincronizada. Pero parece ser que tendremos que...

La NASA ha confirmado que el rover Mars 2020 irá acompañado por un pequeño helicóptero –más bien un dron– a modo de demostrador tecnológico. Mars Helicopter viajará a Marte sujeto a la panza del rover, que lo depositará sobre el suelo...

Con un día de retraso sobre la previsión inicial el primer Falcon 9 bloque 5 de SpaceX ha llevado a cabo con éxito su misión, poniendo en órbita el satélite de telecomunicaciones bangladesí Bangabandhu-1. La primera etapa del cohete, además, ha...

El primer lanzamiento de un Falcon 9 bloque 5 fue pospuesto 24 horas porque apenas a falta de unos segundos para el despegue los ordenadores de a bordo detuvieron la cuenta atrás y ya no hubo tiempo para volver a intentarlo...

Todo está preparado en el Complejo de Lanzamiento 39A del Centro Espacial Kennedy para el lanzamiento del satélite bangladesí de telecomunicaciones Bangabandhu-1, el primero que pondrá en órbita el país. También es el primer lanzamiento de un Falcon 9 Bloque 5....

Al satélite medioambiental Sentinel-3B le quedan aún unos meses de calibraciones para entrar en servicio pero no ha necesitado ni dos semanas tras su lanzamiento para mandar a tierra sus primeras imágenes. La primera, captada el 7 de mayo de 2018...

Krusty, de Kilopower Reactor Using Stirling Technology o Reactor Kilopower Usando Tecnología Stirling (toma retrónimo) es un reactor nuclear experimental para ser usado en el espacio desarrollado en conjunto por la NASA y por la Administración Nacional para la Seguridad Nuclear...

Less than 20 days till I land on Mars!— MarsPhoenix (@MarsPhoenix) 8 de mayo de 2008 En mayo de 2008 la sonda Phoenix de la NASA estaba en los últimos días de su viaje rumbo a Marte, donde donde tenía previsto aterrizar...
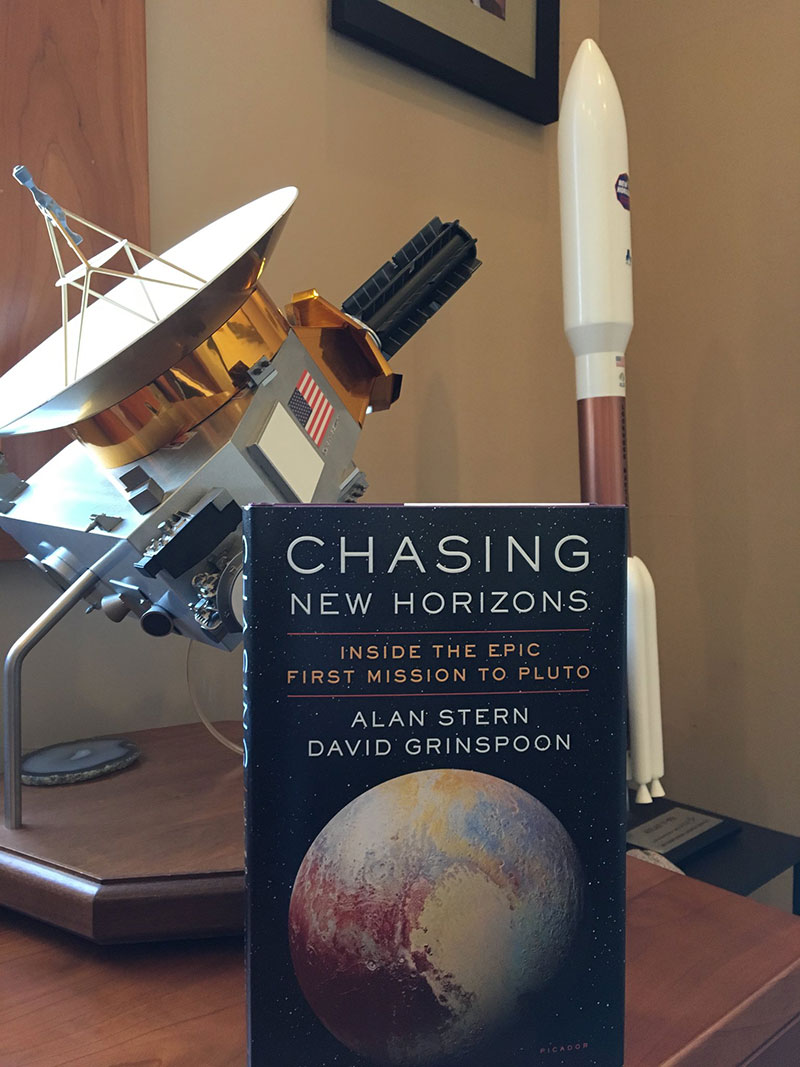
La época en la que vivimos será recordada para siempre como la era en la que los humanos emergimos de la cuna que es nuestro planeta para convertirnos en una especie con un lugar en el espacio. El 14 de julio...
La Agencia Espacial Europea ha seleccionado tres finalistas de entre las 25 propuestas que manejaba para ocupar el hueco de la quinta misión de tamaño medio del programa Cosmic Vision. Las misiones que han pasado la criba son la misión a...
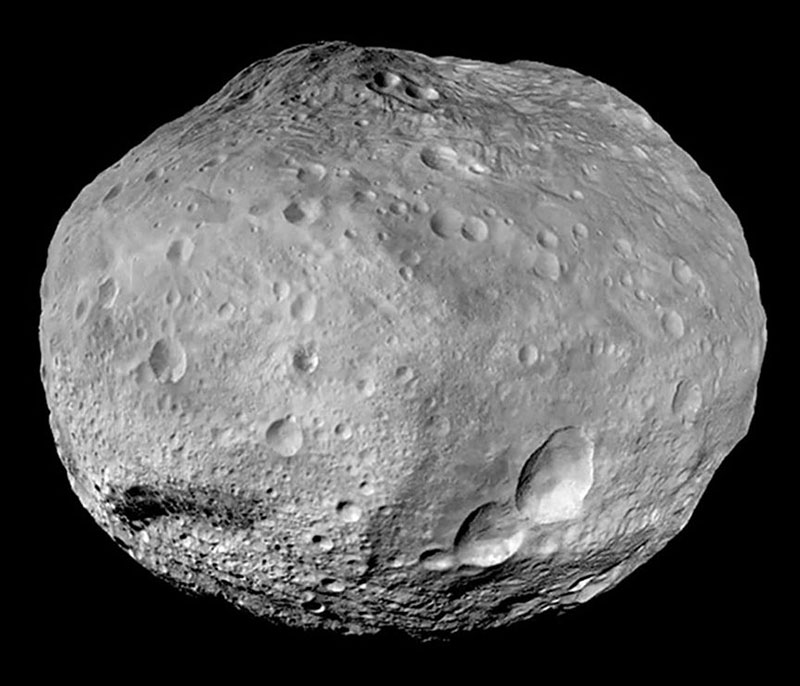
Durante mucho tiempo el Monte Olimpo en Marte ostentó el título de montaña más alta que conocemos en el sistema solar. Su altura, medida con el altímetro láser de la Mars Global Surveyor, es de 21.287,4 metros, poco más de 21...

En medio de una típica y espesa niebla californiana el cohete Atlas V bautizado como Marvin que tenía que enviar rumbo a Marte la sonda InSight de la NASA y sus compañeros de viaje, los CubeSat MarCO, despegaba del Complejo de...

Un amerizaje a las 21:00 del 5 de mayo de 2018, hora peninsular española, frente a la costa de California, ha puesto fin a la misión de la cápsula de carga Dragon 14. Trae a bordo poco más de 1.800 kilos...

Todo está listo en el Complejo de Lanzamientos Espaciales 3 de la Base Aérea de Vandenberg en California para que un cohete Atlas V despegue para enviar la misión InSight de la NASA rumbo a Marte, incluida una revisión del escudo...
El ex-astronauta Chris Hadfield, uno de los favoritos de esta casa, comenta algunos de los mitos sobre el espacio que circulan por ahí y los desmiente… aunque algunas de las cosas que se dicen tienen un punto de razón. la versión...
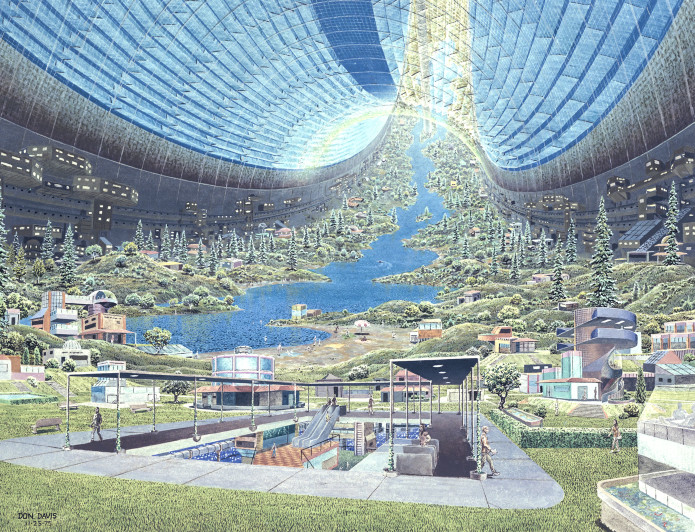
Artist Depiction es un documental que ha recibido ya su merecida financiación en Indiegogo: se trata de una serie de entrevistas a algunos de los artistas que durante décadas han creado esas fascinantes imágenes del futuro para proyectos espaciales de todo...
Hace unos días hablábamos de Maggie, el modelo de ingeniería que usa el JPL en California para probar las instrucciones que envía a Curiosity en Marte. El de la foto –que que sepamos no tiene nombre– es el equivalente para el...

Hace unos días Virgin Orbit conseguía hacer el primer encendido de duración completa del motor NewtonThree que montará la primera etapa de su cohete LauncherOne. Es la empresa antes conocida como Virgin Galactic que va a poner cohetes en órbita lanzándolos...
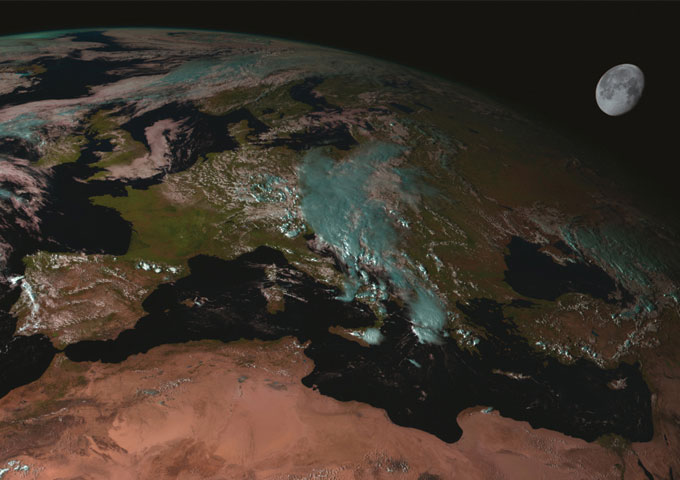
Aunque los instrumentos de observación de la Tierra de los satélites artificiales son calibrados antes del lanzamiento con el tiempo es posible que esa calibración deje de ser válida debido a los efectos de la radiación, contaminación de los objetivos, o...
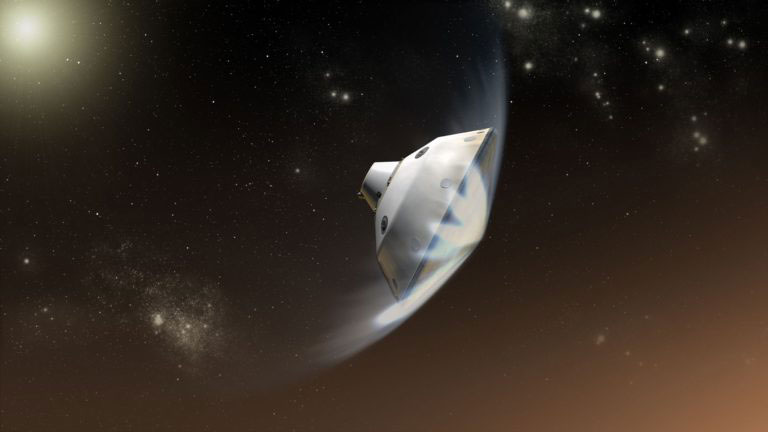
Después de una sesión de pruebas del escudo térmico que tiene que proteger al rover Mars 2020 de la NASA durante su entrada en la atmósfera de Marte los técnicos de Lockheed Martin detectaron una grieta que recorre toda su circunferencia....

Con unas horas de retraso desde el inicio de la ventana de lanzamiento debido a que las condiciones meteorológicas no eran adecuadas el octavo lanzamiento de prueba del cohete suborbital New Shepard de Blue Origin se producía a las 19:06 del...

Launch preparations are underway for New Shepard’s 8th test flight, as we continue our progress toward human spaceflight. Currently targeting Sunday 4/29 with launch window opening up at 830am CDT. Livestream info to come. @BlueOrigin #GradatimFerociter pic.twitter.com/zAYpAGWB8C— Jeff Bezos (@JeffBezos) 27 de...

Casi un mes después de su partida de la Estación Espacial Internacional el 28 de marzo de 2018 la cápsula de carga Progress MS-07 terminaba su misión con una reentrada controlada en la atmósfera a las 8:42 del 26 de abril,...
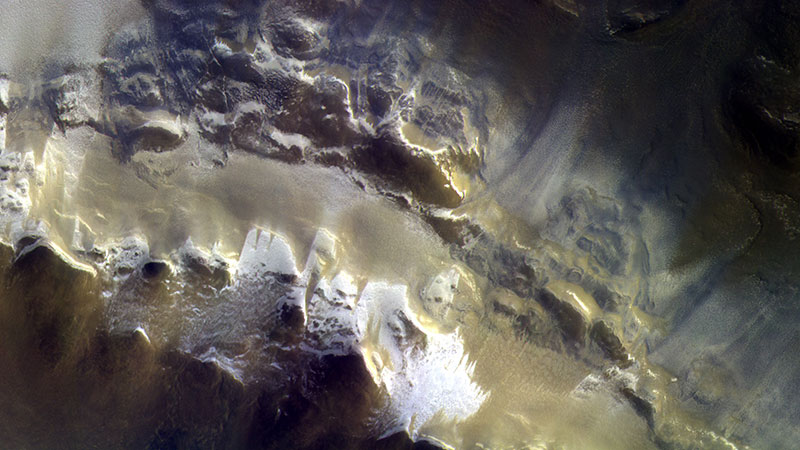
El pasado mes de febrero, casi año y medio después de entrar en órbita alrededor de Marte la Trace Gas Orbiter alcanzaba su órbita final, casi circular, de 400 kilómetros de altitud. Su objetivo principal es buscar gases presentes en cantidades...

Tal y como estaba previsto un cohete Rokot –derivado de un misil intercontinental soviético, por eso despega desde una especie de medio silo– se levantaba del centro de lanzamiento de Plesetsk a las 19:57, hora peninsular española, del 25 de abril...

¿Que si hacen falta mujeres en el espacio? Bueno, es lo mismo que «¿hacen falta hombres en el espacio?» Si vamos a enviar a un ser humano al espacio, deberíamos enviar al más cualificado. Y en ciertas áreas, las mujeres tienen...
El cuento tradicional chino del vaquero y la tejedora habla de la historia de amor entre Niulang, simbolziado por Altair, y Zhinü, simbolizada por Vega, quienes fueron desterrados a lados opuestos del Río de plata (la Vía Láctea) a causa de...

La Agencia Espacial Europea, en colaboración con The Hague Street Art, ha convocado el concurso de arte urbano Graffiti Without Gravity, en el que el próximo 18 de mayo doce artistas europeos crearán en la Space Expo de Noordwijk otras tantas...

Todo está listo en el cosmódromo de Plesetsk en Rusia para que un cohete Rockot ponga en órbita el satélite Sentinel-3B del programa Copérnico. Se colocará en órbita a 180 grados del Sentinel-3A, lo que reducirá a la mitad el tiempo...

BepiColombo es una misión de la Agencia Espacial Europea que tiene como destino Mercurio. Si todo va según lo previsto será lanzada en octubre de 2018 y llegará a su destino el 5 de diciembre 2025, convirtiéndose en la segunda misión...

La Administración Espacial Nacional China acaba de anunciar que ha comenzado la selección de un tercer grupo de astronautas que estará formado por 18 personas. Pero a diferencia de los dos grupos anteriores en este caso la selección no se limitará...
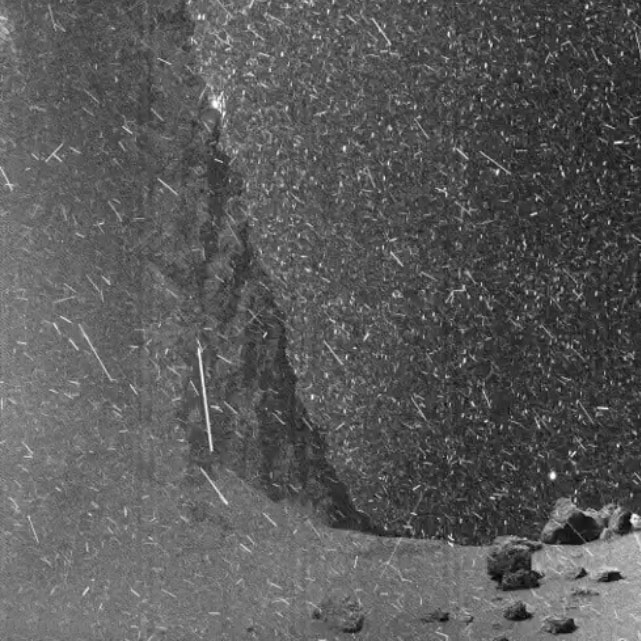
#ROSETTA OSIRIS #67P/CHURYUMOV-GERASIMENKO new albums --ROSETTA EXTENSION 2 MTP030-- Miércoles 1 Junio 2016 all filters stacked pic.twitter.com/Bf173Z5g79— landru79 (@landru79) 23 de abril de 2018 No se trata exactamente de nieve sino de partículas de polvo y hielo en el entorno del cometa...
EL próximo 5 de mayo la NASA tiene previsto enviar el aterrizador InSight rumbo a Marte, y junto con él van a viajar los primeros CubeSat que enviemos a otro planeta. Se trata de los Mars Cube One, dos CubeSat gemelos...

La misión Chang'e-4 del programa espacial chino, que será la primera de la historia en aterrizar en el lado oculto –que no oscuro– de la Luna tiene reservado un espacio para un experimento propuesto por estudiantes. De las más de 200...
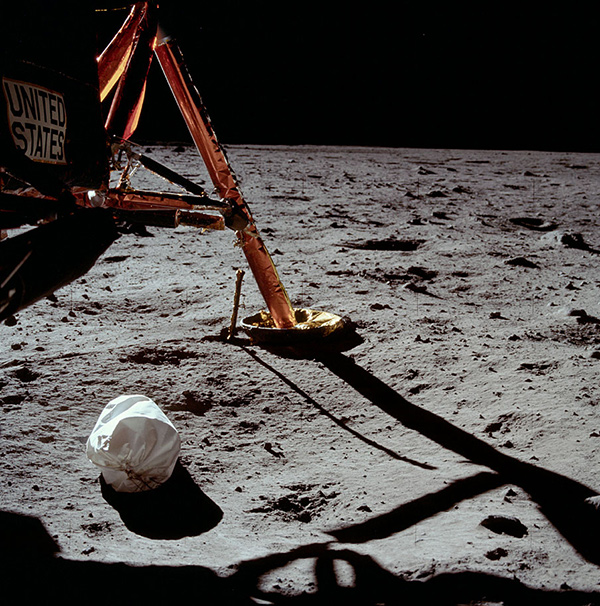
Fotografía: NASA. Una bolsa de basura. Contiene desechos humanos y otros restos que debían quedarse en la Luna para controlar el espacio y el peso del módulo lunar antes de su despegue hacia el módulo en órbita que debía traer a los...
Por Nacho Palou -
23 ABR 2018
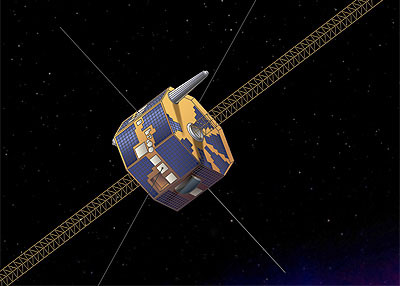
A mediados de enero de 2018 el astrónomo aficionado Scott Tilley descubría por casualidad que el satélite IMAGE de la NASA, que había dejado de dar señales de vida 18 de diciembre de 2005, seguía activo. Para asombro de propios y extraños...

Dice Pedro Duque, el primer y por ahora único astronauta español, que este vídeo, el primero grabado en 360º dentro de la Estación Espacial Internacional es «como estar allí otra vez». Grabado fundamentalmente por Paolo Nespoli con una cámara Vuze en...

El segundo intento ha sido el bueno y el observatorio espacial TESS de la NASA ya está en órbita tras ser lanzado por un Falcon 9 FT de SpaceX. El lanzamiento se produjo a las 00:51:31 del 19 de abril de...
Un vídeo y unas recientes declaraciones de Zhou Jianping, el jefe de diseño del programa espacial tripulado chino, han revelado más detalles acerca de las fechas de entrada en servicio de su futura estación espacial. Allá por 1992 China comenzó a...
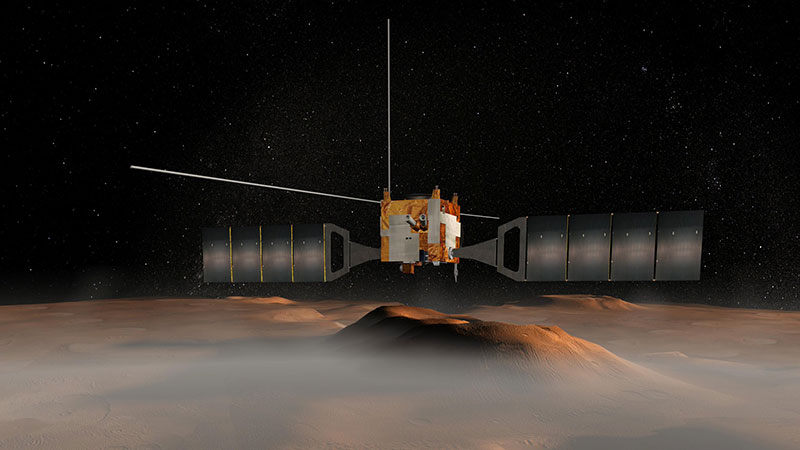
Telemetry received!!! #MarsExpress now dumping data to tell flight controllers how it feels after the reboot! Smiles & happy faces here at #ESOC tonight #Rday #mars pic.twitter.com/ILIkQC1rMI— ESA Operations (@esaoperations) 16 de abril de 2018 Se confirman las buenas noticias desde el...

Bajo el título Cosmos: el nacimiento de una nueva era se expusieron el año pasado todo tipo de artefactos relacionados con la exploración del espacio en el Museo Politécnico de Moscú. Les ha quedado una bonita web de aquella exposición, con...

Como es mejor prevenir que curar el lanzamiento de TESS, el nuevo cazador de planetas extrasolares de la NASA, ha sido pospuesto 48 horas para hacer algunas comprobaciones más en el sistema de guiado y control. Con esto el lanzamiento está...

Todo está listo en el Complejo de Lanzamiento 40 de Cabo Cañaveral para que un Falcon 9 ponga en órbita TESS, el nuevo observatorio espacial de la NASA. Es el primer lanzamiento de SpaceX para una misión científica de la NASA...
Otro libro más para The Pila, en este caso escrito por algunos de los directores de vuelo de la Estación Espacial Internacional. De la descripción del libro: Desde el 2 de noviembre de 2000 la Estación Espacial Internacional ha estado permanentemente ocupada...
Diseñada para una misión de dos años la Mars Express de la Agencia Espacial Europea lleva más de catorce años en órbita alrededor de Marte, así que lo mires como lo mires la misión ha sido todo un éxito. Pero aunque...
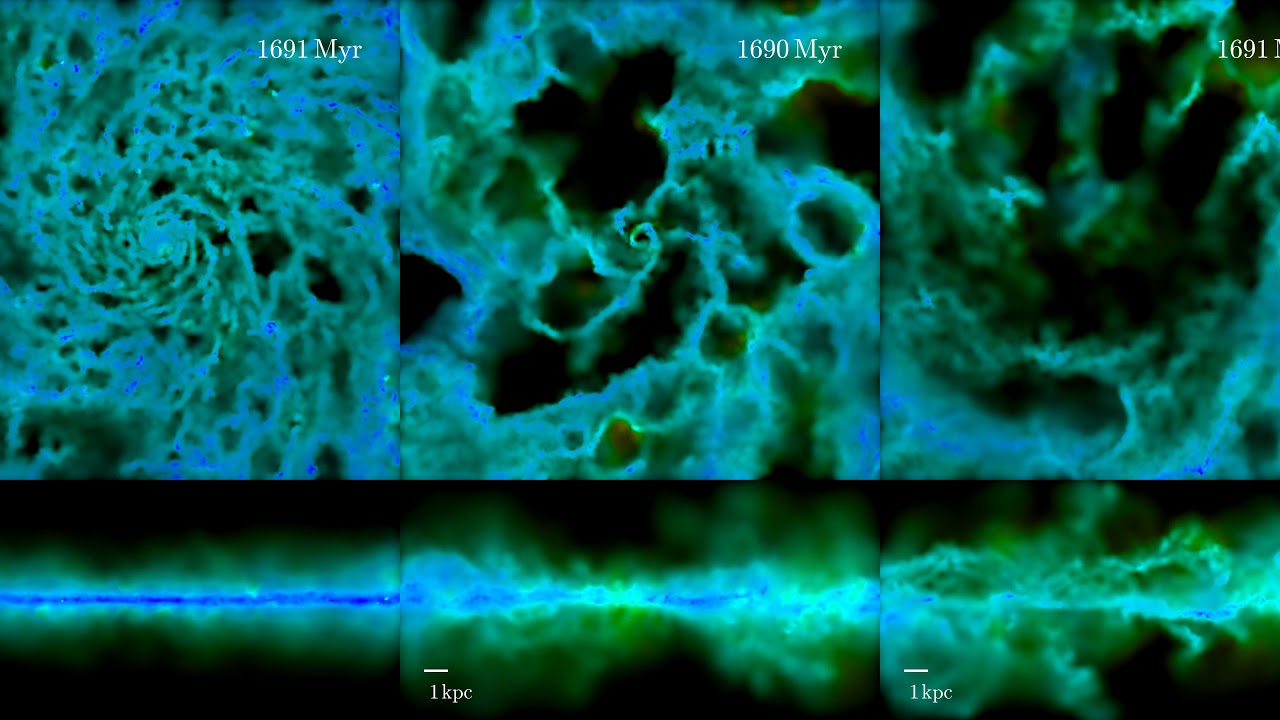
Alex Gurvich tiene esta estupenda simulación acerca de la de formación de las galaxias que preparó como parte de su trabajo de investigación. Cada tic del reloj cósmico es un millón de años – y transcurren a gran velocidad. Son tres...

Lanzado en la cápsula de carga Dragon 14 el ASIM, de Atmosphere-Space Interactions Monitor o Monitor de Intercacciones entre la Atmósfera y el Espacio de la Agencia Espacial Europea ya ha quedado instalado en el exterior del laboratorio Columbus de la...
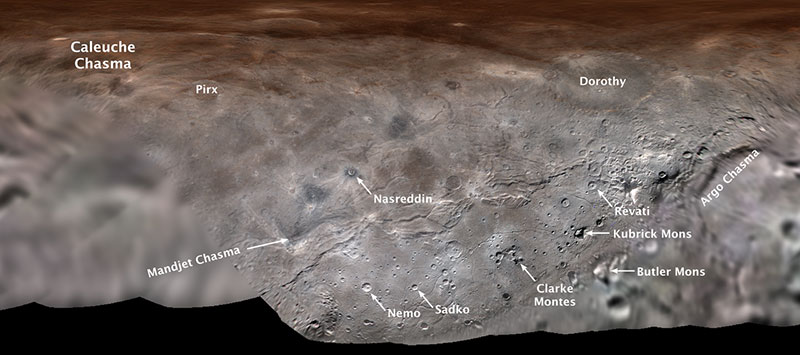
Exploradores y visionarios legendarios, reales y ficticios, están entre aquellos inmortalizados en el primer grupo de nombres oficiales para la superficie de Caronte, la luna más grande de Plutón. Han tardado un pelín más que con los primeros nombres oficiales para...

Igual que otros países la India optó hace años por desplegar un sistema de navegación por satélite propio para no depender de la buena voluntad de los dueños de los otros sistemas. Denominado IRNSS, de Indian Regional Navigation Satellite System, o...

Anda haciendo las rondas la noticia de que la empresa Orion Span estadounidense inaugurará un «hotel de lujo» en órbita terrestre en 2022 conocido como Aurora Station. Esto viene siendo una estación espacial pero dedicada a que aquellos que tengan 9,5...

Los espaciotrastornados del mundo por lo general no teníamos este lanzamiento en el radar, pero China ha llevado a cabo su lanzamiento número 11 de 2018 el 10 de marzo, con lo que siguen en camino de conseguir más de 40...

Nacida el 9 de abril de 1921 Mary Jackson creció en Hampton, Virginia. Después de graduarse con los más altos honores de la escuela secundaria, continuó su educación en el Instituto Hampton, ahora Universidad Hampton, obteniendo una licenciatura en matemáticas y...

En las oficinas de mi trabajo hay una ortofoto de la provincia de A Coruña de mediados de los años 80 que en su momento resultaba impresionante porque no era habitual ver el mundo así. Recuerdo pasar largos ratos cuando iba...
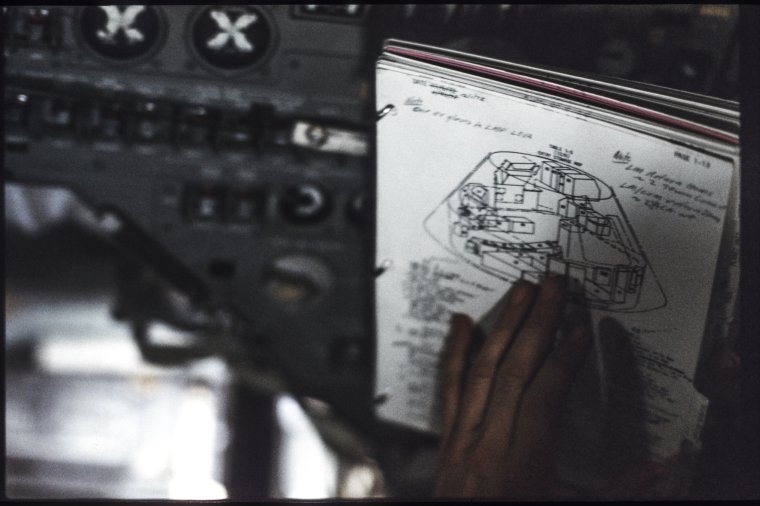
En Time, Unseen Apollo, La NASA hizo de la fotografía una prioridad durante las misiones Apolo, modificando cámaras para que pudieran funcionar en el hostil entorno del espacio e inventando películas ultrafinas para que cupieran hasta 200 exposiciones en un carrete....
Por Nacho Palou -
7 ABR 2018
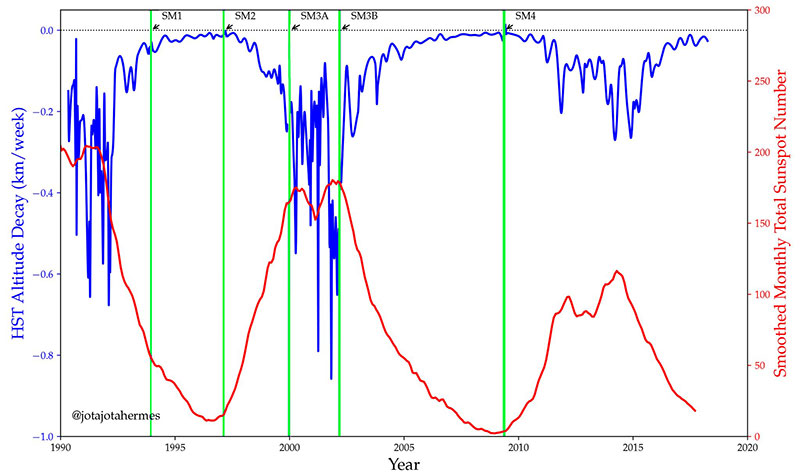
Uno de los factores que complicaba predecir el momento de la reentrada en la atmósfera del laboratorio espacial Tiangong–1 era que la atmósfera se hincha y se deshincha en función de la actividad solar. En general a más actividad solar más...

El segundo Ariane 5 del año, en concreto un Ariane 5 ECA, despegaba las 23:34, hora peninsular de España, del espaciopuerto de Kourou con los satélites de comunicaciones Superbird-8/DSN-1 y HYLAS 4 a bordo. El primero fue colocado en su órbita...

Con Mark «Forger» Stucky y Dave Mackay a los mandos el VSS Unity de SpaceShipTwo ha llevado a cabo su primer vuelo con motor, alcanzando los 84.271 pies de altitud –25.686 metros– y Mach 1,87 tras 30 segundos de ignición del...
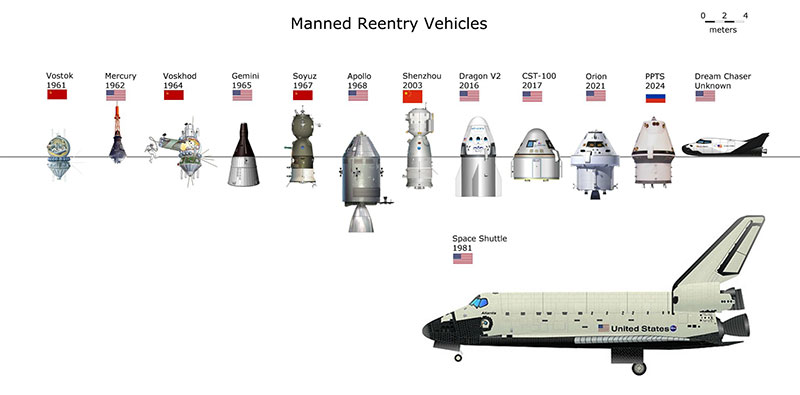
Este gráfico recoge todas las naves espaciales tripuladas que han estado en órbita desde el principio de la era espacial… e incluye algunas de las que aún tienen que entrar en servicio, aunque quizás peca de optimismo con la Dream Chaser,...

Navegando de forma autónoma –aunque siempre con supervisión humana por si pasa algo, de forma parecida a la que vuela un avión con el piloto automático activado– la cápsula de carga Dragon 14 aparcó a 10 metros de la Estación Espacial...
Retransmisión justo antes de cortar la señal de vídeo el pasado 30 de marzo. Imagen: SpaceX. Durante la retransmisión del lanzamiento de SpaceX de la semana pasada (el quinto lote de diez satélites Iridium–Next) se produjo una interrupción intencionada de la retransmisión...
Por Nacho Palou -
4 ABR 2018

En teoría cualquier objeto que tenga masa podría convertirse en un agujero negro si toda su materia se comprimiese a un tamaño determinado (supuestamente) por el llamado radio de Schwarzschild. Al alcanzar ese tamaño el objeto se volverá denso de narices...
Por Nacho Palou -
3 ABR 2018

Tras un lanzamiento sin problemas la cápsula de carga Dragon 14 viaja rumbo a la Estación Espacial Internacional con 1.721 kilos de carga –suministros para los tripulantes, para la propia Estación, material para experimentos, etc– en su compartimento presurizado y otros...

Esta cosa es bastante alucinante a pesar de que puede resultar un poco repulsiva: se trata de un dispositivo diseñado para funcionar imitando el tracto intestinal y el colon humano. Algo así como un intestino robot que produce combustible sólido para...
Por Nacho Palou -
3 ABR 2018

Sigue el ritmo casi desbocado de lanzamientos espaciales con el de la cápsula de carga Dragon 14, formalmente SpaceX CRS-14, que está lista en el Complejo de Lanzamiento 40 de Cabo Cañaveral para ser lanzada rumbo a la Estación Espacial Internacional...

NW of Tahiti - it managed to miss the 'spacecraft graveyard' which is further south! pic.twitter.com/Sj4e42O7Dc— Jonathan McDowell (@planet4589) 2 de abril de 2018 Poniendo fin a meses de especulaciones el laboratorio espacial chino Tiangong–1 hizo su reentrada en la atmósfera sobre...
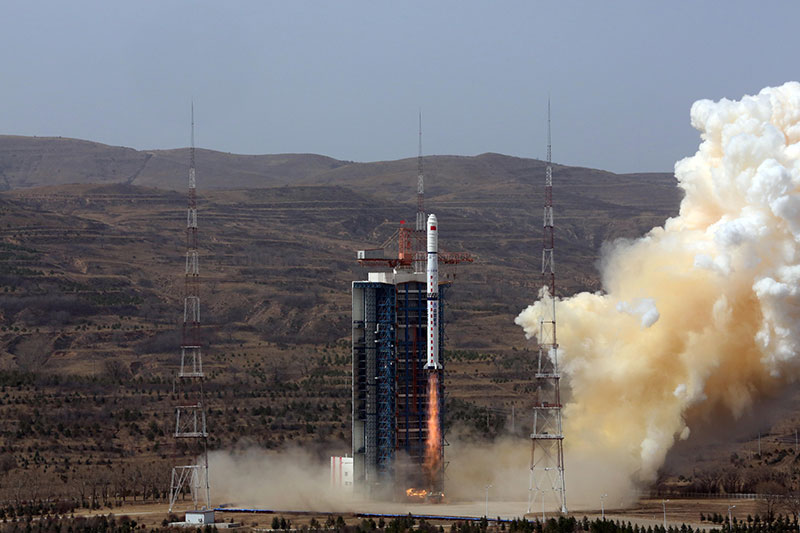
Un cohete Larga Marcha 4C que despegó a las 5:22 del 31 de marzo de 2018, hora peninsular española, desde el centro de lanzamiento de satélites de Taiyuan ha sido el décimo lanzamiento espacial chino del año. A bordo viajaban los...
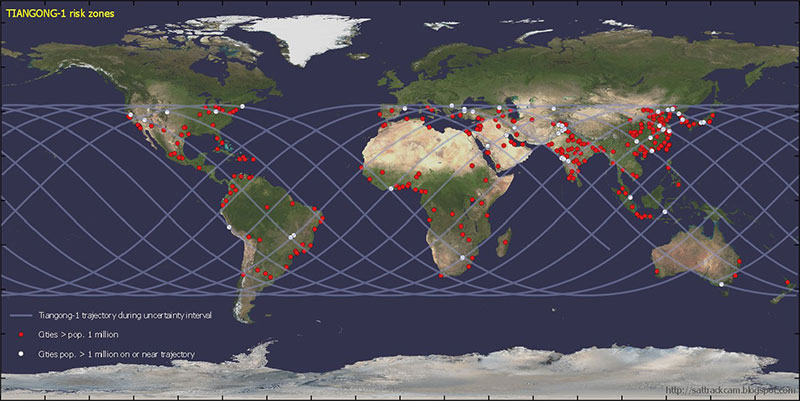
Ahora que falta cada vez menos para la reentrada del laboratorio espacial chino Tiangong-1 las distintas previsiones sobre el momento en el que ocurrirá van convergiendo en que esta ocurrirá entre –más o menos– el mediodía del día 1 de abril...

El sexto lanzamiento de SpaceX en 2018 ha servido para poner en órbita el quinto lote de diez satélites de la segunda generación del sistema de telefonía móvil Iridium, conocida como Iridium–next. El objetivo es que cuente con 66 satélites activos...

Con el retraso de los lanzamientos del sistema de pruebas Aspire de la NASA y del de los diez satélites Iridium Next a cargo de SpaceX al final el 29 de marzo de 2018 sólo tuvo tres lanzamientos en lugar de...
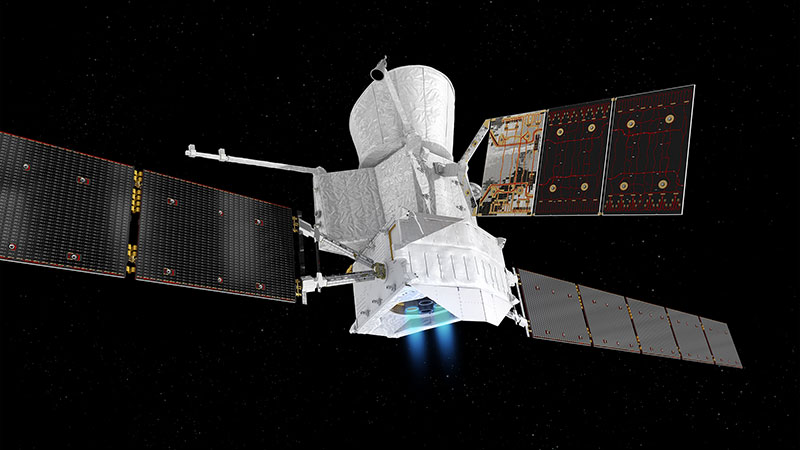
Compuesta por tres módulos -en la foto de arriba está en primer plano el MTM, en medio el MPO y arriba de todo el MMO protegido por el parasol– la Agencia Espacial Europea y la Agencia Japonesa de Exploración Aeroespacial están...
La Agencia Espacial Europea acaba de anunciar el ganador del concurso que convocó para escoger el logo que decorará la cofia protectora del cohete que pondrá en órbita el observatorio Cheops, de CHaracterising ExOPlanets Satellite, o Satélite para la Caracterización de Exoplanetas....
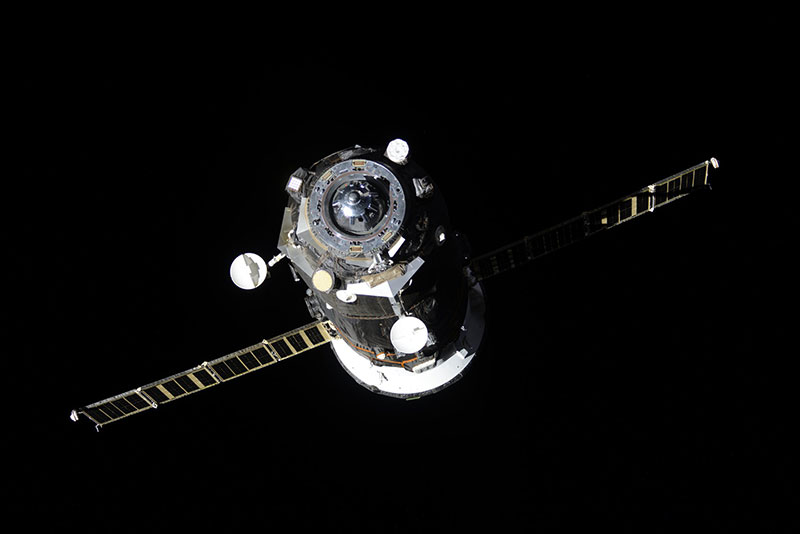
A las 15:50:30 del miércoles 28 de marzo de 2018, hora peninsular española, la cápsula de carga Progress MS-07 dejaba la Estación Espacial Internacional para emprender una misión de cuatro semanas sobre la que Roscosmos no ha dicho ni mú. Esta...
La NASA tiene previsto lanzar el próximo 31 de julio de 2018 la sonda Parker Solar Probe con destino al Sol. Será le primera sonda de la historia que «toque» el Sol, ya que está diseñada para poder penetrar en la...

Para estos señores también era “muy improbable” que un trozo de cohete cayera en su jardín y mira. La cubierta en titanio del motor del PAM-D (la tercera etapa de un cohete Delta 2) cayó a 240 km de la ciudad de...
Por Nacho Palou -
28 MAR 2018
Los astronautas Chris Hadfield, Jeffrey Hoffman, Mae C. Jemison, Jerry Linenger, Leland Melvin, Mike Massimino y Nicole Stott contestan en este vídeo a 50 de las preguntas más habituales sobre el espacio que se pueden encontrar en Internet… Cosas como si...
Sorprendiendo aproximadamente a nadie la NASA acaba de anunciar que el lanzamiento del telescopio Espacial James Webb se retrasa de nuevo. A mayo de 2020 como muy pronto, lo que supone un año más respecto a la última fecha anunciada. Esa...
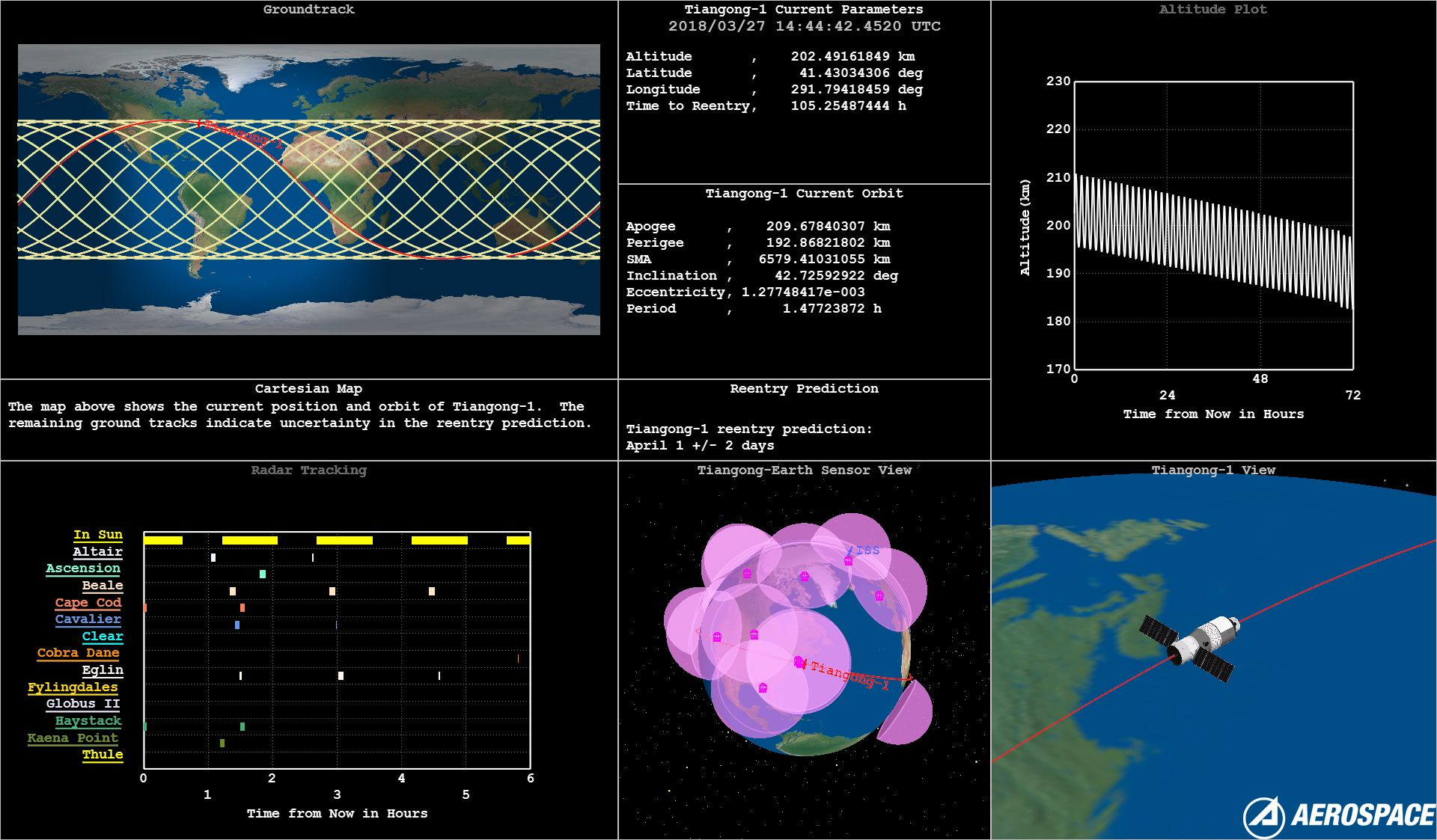
Según el último parte de la agencia espacial china la caída de la estación espacial Tiangong-1 se producirá previsiblemente entre el 30 de marzo y el 2 de abril. Y está previsto que caiga en casi cualquier parte de la tierra...
Por Nacho Palou -
27 MAR 2018

Antes pasaban meses entre lanzamientos espaciales. Luego semanas. Ahora es rara la semana en la que no hay al menos uno. Pero el jueves 29 de marzo de 2018 puede establecer un récord porque puede haber –si no se producen cancelaciones...
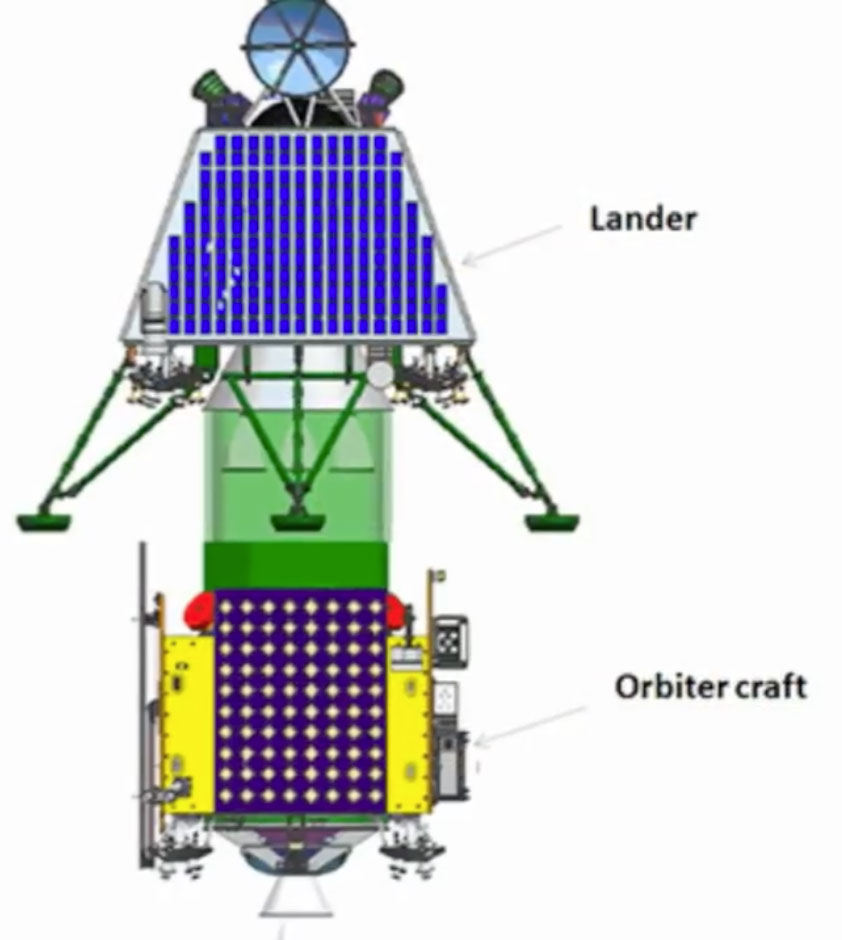
La India tenía previsto lanzar su segunda misión a la Luna en el primer trimestre de 2018 pero al final han decidido posponerla al menos hasta octubre para tener tiempo a llevar a cabo nuevas pruebas. Y no es descabellado teniendo en...

En algunos lugares a lo largo y ancho de los Estados Unidos se pueden encontrar unas instalaciones de unos 24×16 metros con una especie de códigos de barras pintados en su superficie. Son una reliquia que data de los años 50...

Cuando la NASA construyó el rover Curiosity para enviarlo a Marte también construyó una copia casi exacta, bautizada como Maggie, que vive en el patio marciano del Laboratorio de Propulsión a Chorro en Pasadena, California. Maggie se utiliza como plataforma de...
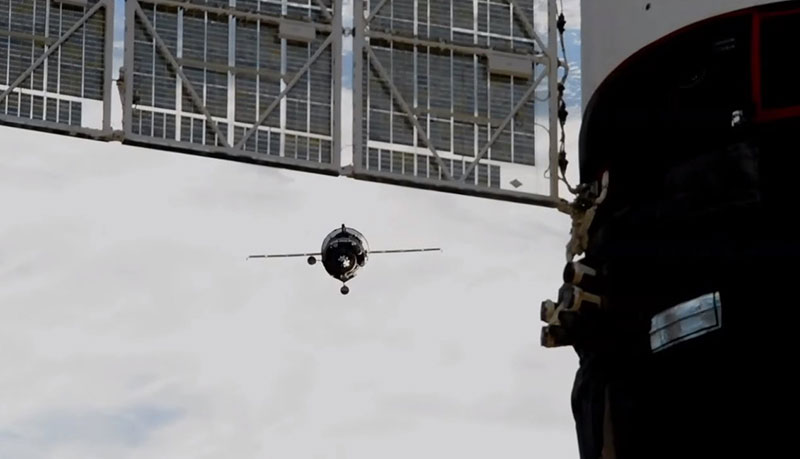
La cápsula tripulada Soyuz MS-08 atracaba a las 20:40 del 23 de marzo de 2018 en el módulo Poisk de la Estación Espacial Internacional tras un viaje de dos días desde su lanzamiento el día 21. A bordo van Oleg Artemyev...
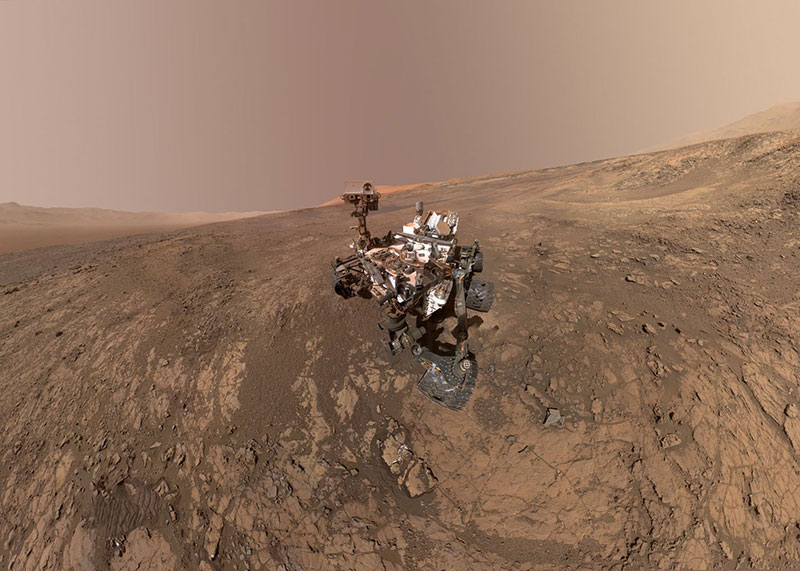
Diseñado para durar un año marciano, lo que son 687 días terrestres o 668 soles (días marcianos), el rover Curiosity de la NASA acaba de cumplir 2.000 soles en funcionamiento sobre la superficie de Marte. Según la nota del Jet Propulsion...

El puerto de Los Ángeles ha dado permiso a SpaceX para comprar un terreno desocupado de unos 73.000 metros cuadrados, lo que según lo mires equivale a entre unos 18 y algo menos de 7 campos de fútbol. Es lo que...

Imagen de Marte en color real. ESA. A través del Astronomer’s Telegram, un servicios que utilizan los astrónomos para difundir información sobre eventos astronómicos, el cosmólogo Peter Dunsby publicó un informe en el que describía el descubrimiento de un objeto en movimiento...
Por Nacho Palou -
23 MAR 2018
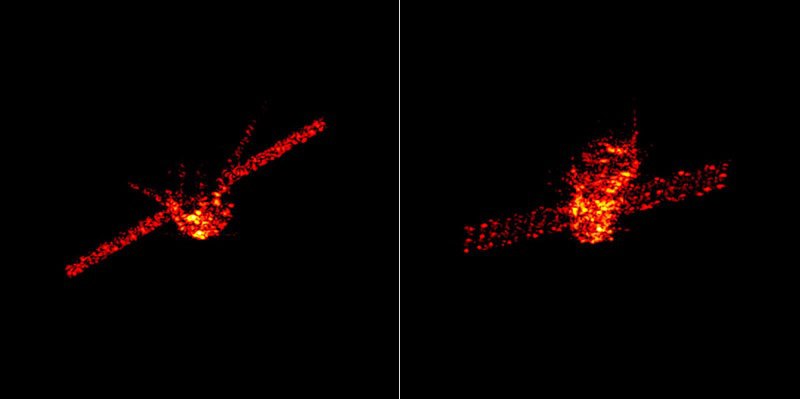
Now here it is: A radar image film of the chinese space station Tiangong-1 together with a simple 3D model for orientation. You can see how it is rotateting (but faster that in reality). #Tiangong1 #isar #film #radar #reentry #tira More info...
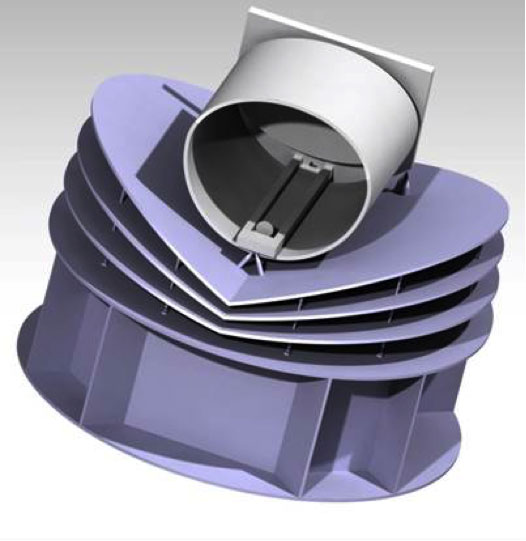
Ariel, de Atmospheric Remote‐sensing Infrared Exoplanet Large‐survey, o Análisis Atmosférico Remoto de gran tamaño de Exoplanetas en el Infrarrojo ha sido escogida por la Agencia Espacial Europea como su próxima misión de tamaño medio del programa Cosmic Vision 2015-2015. Dotado de un...

Tal y como estaba previsto el Soyuz FG que hace el cohete número 1.886 de la familia lanzado despegaba a las 18:44:23.396, hora peninsular española, dejando en órbita baja terrestre la cápsula Soyuz MS-08 y sus tres tripulantes 8 minutos y...
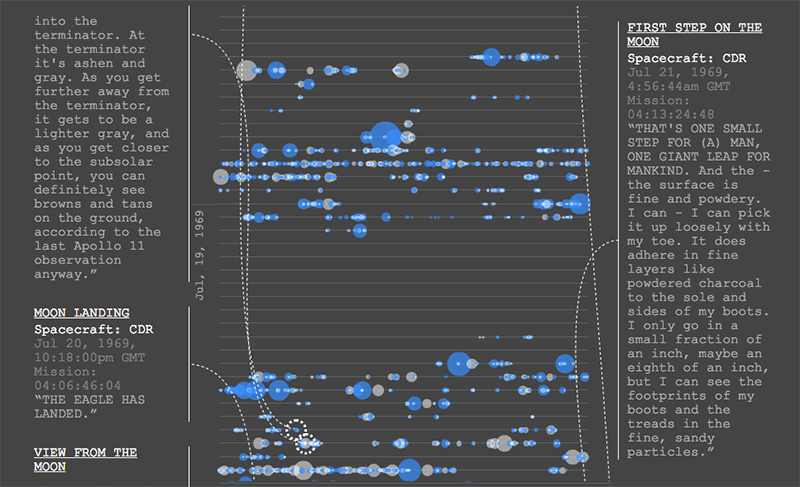
Lunar Conversations es una cronología visual de las conversaciones de la misión Apolo 11, desde el despegue hasta el regreso a la Tierra. Su autor es Nicholas Rougeux. La gráfica muestra los diversos días y horas de la misión con globos...

Noch 10 Sekunden! (¡Quedan 10 segundos!) – el líder de la expedición agarra la palanca que producirá el lanzamiento del cohete.Noch 6 Sekunden! (¡Quedan 6 segundos!)Los números son cada vez más grandes: 5, 4, 3, 2, 1,JETZT! (¡Ahora!) Todos los espaciotrastornados...

La Humanity Star, un artilugio espacial tipo bola de discoteca que puso en órbita el primer cohete Electron de Rocket Lab, lanzado desde Nueva Zelanda, no estará en el espacio los nueve meses que estaba previsto. De hecho no estará en...
Por Nacho Palou -
21 MAR 2018
Lanzado el 7 marzo de 2009 el telescopio espacial Kepler de la NASA tenía como misión observar fijamente una zona de la Vía Láctea situada entre las constelaciones del Cisne y Lyra con el objetivo de localizar planetas extrasolares. Para esto...

Todo está listo en el cosmódromo de Baikonur para el lanzamiento de la cápsula tripulada Soyuz MS-08 desde la plataforma de Gagarin rumbo a la Estación Espacial Internacional con Oleg Artemyev de Roscosmos y Drew Feustel y Ricky Arnold de la...

Un cohete Larga Marcha 2D despegaba a las 8:10, hora peninsular española del 17 de marzo de 2018, con el cuarto satélite de la constelación LKW a bordo para convertirse en el octavo lanzamiento orbital chino del año. Por los pocos...

El equipo de la New Horizons ya ha escogido nombre para referirse a 2014 MU69, el próximo objetivo de la sonda, que sobrevolará el 1 de enero de 2019. Ultima Thule es el nombre escogido. Thule era el nombre de una...

Didn't get enough of #GOESS? Check out our Countdown to T-0 video to see the #GOESS spacecraft processing, encapsulation, transport to the pad, as well as lift and mate to the @ulalaunch #AtlasV. pic.twitter.com/MVGbP9pUkt— NASA_LSP (@NASA_LSP) 6 de marzo de 2018 Hemos...
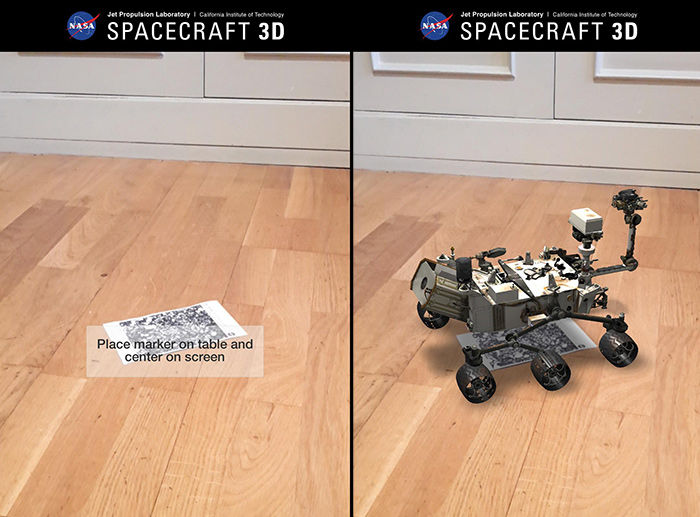
La aplicación Spacecraft 3D (para móviles compatibles con Google AR) pone sobre tu escritorio a través de la realidad aumentada algunas naves espaciales, sondas y rovers de las últimas misiones de la NASA. La aplicación utiliza la cámara del móvil y...
Por Nacho Palou -
13 MAR 2018
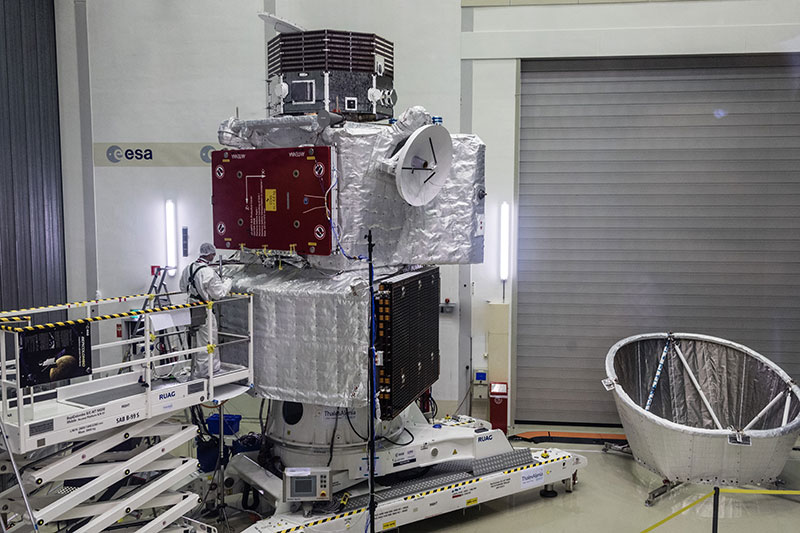
BepiColombo, la misión conjunta a Mercurio de la Agencia Espacial Europea (ESA) y de la Agencia Japonesa de Exploración Aeroespacial (JAXA), ha dado otro importante paso adelante de cara a su lanzamiento: los técnicos del Centro Europeo de Investigación y Tecnología...

Un cohete Soyuz con una etapa superior Fregat despegaba a las 18:10, hora peninsular española, del pasado 9 de marzo de 2018 para poner en órbita los cuatro últimos satélites de la constelación O3b para el operador SES. Los satélites O3b,...

Lanzamiento del PSLV-C40 desde el centro espacial Satish Dhawan. Imagen: ISRO. En IEEE Spectrum, FCC Accuses Stealthy Startup of Launching Rogue Satellites El 12 de enero un cohete Polar Satellite Launch Vehicle (PSLV) despegó desde la costa oriental de la India. Mientras...
Por Nacho Palou -
12 MAR 2018
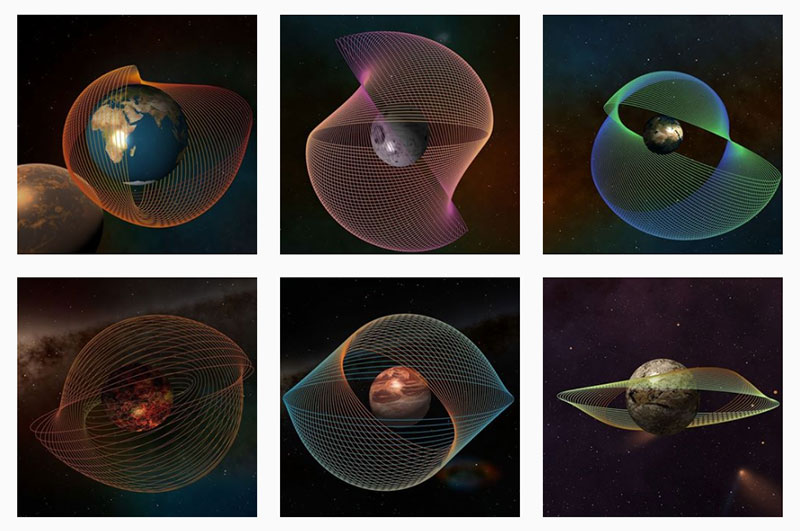
Abofazl Shirazi tiene un curiosísima cuenta de Instagram llamado Homa Artwork con imágenes medio astrofísicas medio artísticas creadas con Homa; un simulador de órbitas espaciales. Con Homa se pueden hacer pruebas de mecánica orbital y astrodinámica de todo tipo. Hay que...

SpaceX ha publicado una especie de resumen del lanzamiento del primer cohete Falcon Heavy en el que aparte de las reacciones del público y del personal de la empresa por fin podemos ver qué paso con el núcleo central del cohete....
Bajo el impactante y a la vez acongojante título de «Opciones e incertidumbres en defensa planetaria: planificación de misiones y diseño de vehículos para respuestas flexibles» un estudio de la NASA y la NNSA (National Nuclear Security Administration) publicado en Acta...

Previsión de pérdida de la altitud de la estación Tiangong-1 a 6 de marzo 2018. Imagen: ESA Según ha calculado la Agencia Espacial Europea la reentrada descontrolada de la estación espacial china Tiangong-1 se prducirá muy probablemente entre los días 29 de...
Por Nacho Palou -
8 MAR 2018
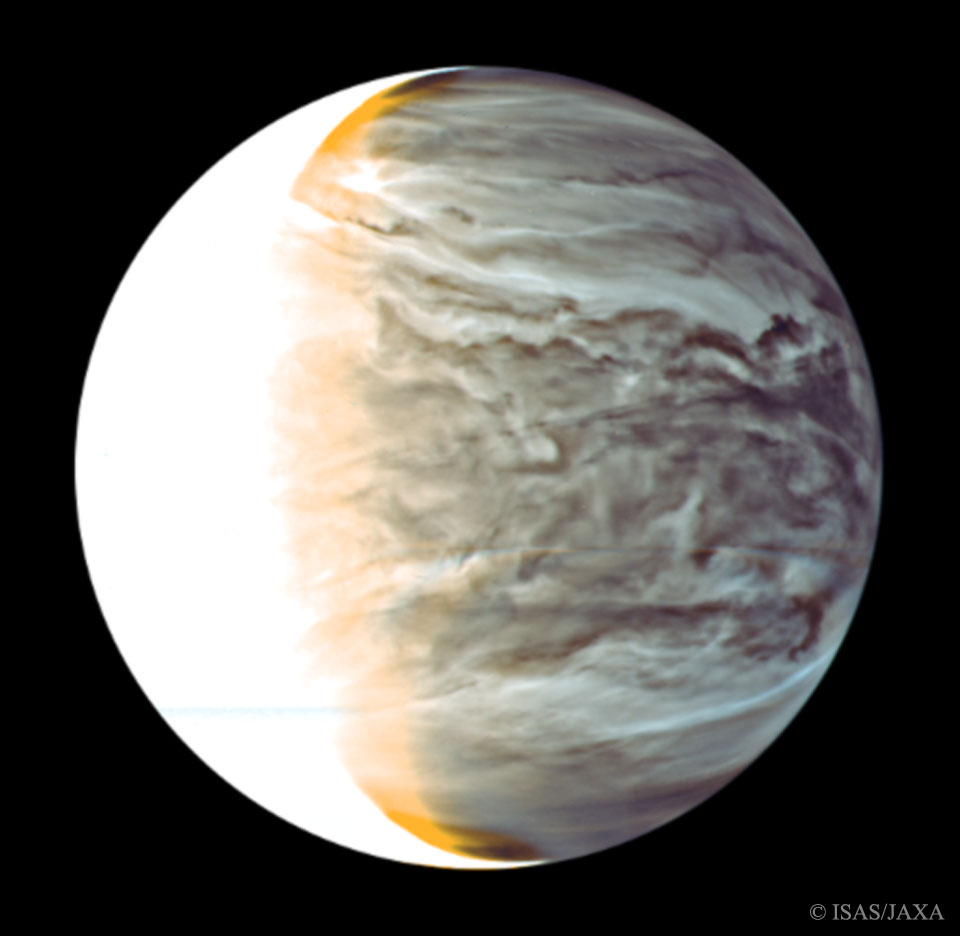
Venus rota tan lentamente sobre su propio eje que necesita 243 «días terrestres» para completar un «día venusino»; de hecho es el «día» más largo de los planetas del Sistema Solar, más incluso que el propio año venusino (lo que tarda en...

Tras un lanzamiento por el libro a las 6:33 hora peninsular española del 6 de marzo de 2018 el satélite de telecomunicaciones Hispasat 30W-6 ya está en órbita de transferencia geoestacionaria. Desde ella de dirigirá a su órbita definitiva a 30º...
En un motor de iones se carga eléctricamente un gas, habitualmente xenón, lo que lo convierte en un ión, un átomo o molécula con carga eléctrica. Esos átomos cargados eléctricamente se aceleran al pasar a través de unas rejillas metálicas también...

Si alguna vez la NASA consigue terminar el Space Launch System y llega a la fase de lanzar misiones tripuladas los astronautas que vayan a viajar a bordo de la cápsula Orión ya pueden acceder a ella cómodamente desde la torre...
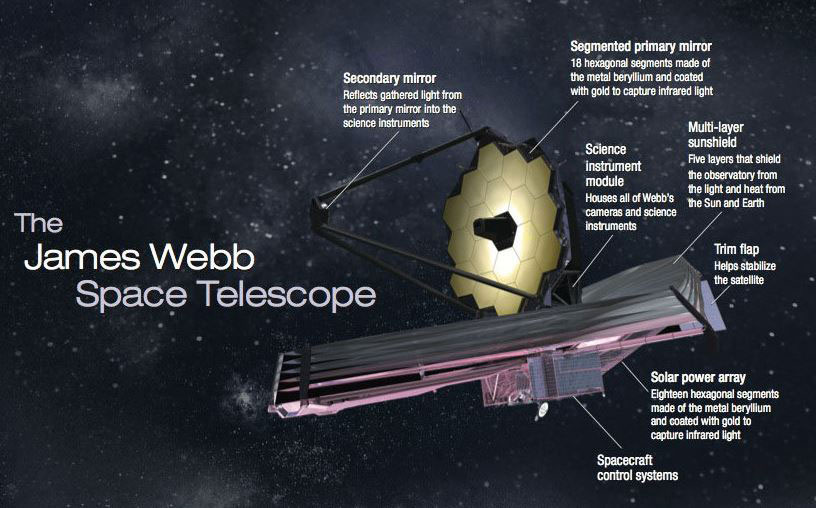
Tras años incumpliendo plazos y presupuestos en 2011 la NASA fijó un plazo de lanzamiento y un presupuesto para el telescopio espacial James Webb (JWST) que esperaban que fueran definitivos: octubre de 2018 y 8.000 millones de dólares. Y todo parecía...

Después de poner en órbita con éxito a Starman a bordo del Tesla Roadster color cereza de Elon Musk en su primer lanzamiento el Falcon Heavy, ya oficialmente el cohete más potente en servicio, está listo para su primera misión. Prevista...

Después de casi año y medio sin poder usarlo Curiosity ha vuelto a hacer un agujero en una roca en Marte con su taladro. El problema viene de diciembre de 2016, cuando el freno que sujetaba el cabezal del taladro en...

Hayabusa2 has detected asteroid Ryugu for the first time! Our onboard ONC-T camera captured images of the asteroid on February 26, 2018. https://t.co/v3rDGwzWtj pic.twitter.com/RjYP4ZrQ4S— HAYABUSA2@JAXA (@haya2e_jaxa) 1 de marzo de 2018 Lanzada el 3 de diciembre de 2014, la sonda Hayabusa 2...

Fotografía: SpinLaunch, vía TechCrunch. En Motherboard, This Company Wants to Catapult Rockets into Space, Jonathan Yaney quiere abaratar los viajes espaciales reduciendo el coste por lanzamiento desde las decenas de millones de dólares que cuesta hacerlo con un cohete a menos de...
Por Nacho Palou -
1 MAR 2018
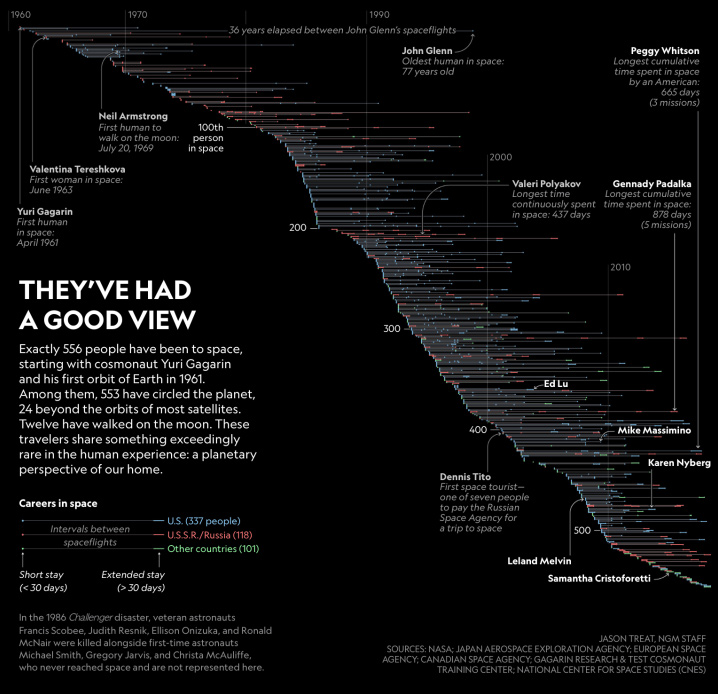
Clic para ver el original ampliado. They've had a good view es un bonito gráfico de National Geographic que representa a las 556 personas que han estado en el espacio desde que Yuri Gagarin completara su primera órbita en 1961. De esas...
Por Nacho Palou -
28 FEB 2018
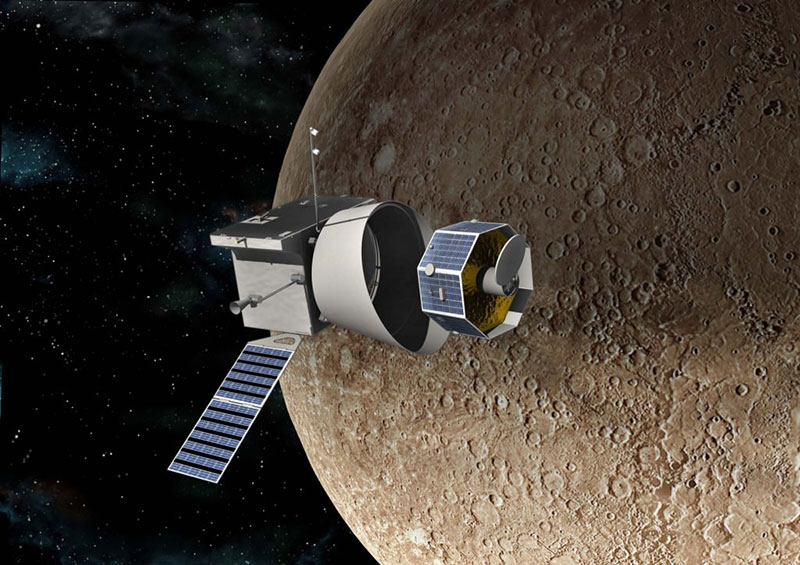
Si no hay más retrasos un Ariane 5 lanzará en octubre de 2018 la misión BepiColombo, una misión conjunta de la Agencia Espacial Europea y la Agencia Japonesa de Exploración Aeroespacial con destino a Mercurio. Esta misión está compuesta por dos...

Un suave –para los estándares de estas cápsulas, cuyos aterrizajes han sido descritos como una serie de violentas colisiones– aterrizaje en Kazajistán ponía fin a las 3:31 del 28 de febrero, hora peninsular española, a la misión de la cápsula tripulada...

Me sorprende un poco que la fuente original de este vídeo sea RT, ese fiable sitio de noticias donde los haya donde nunca han publicado fakes… Pero lo cierto es que el 17 de agosto de 2017 Fyodor Yurchikhin y Sergey...
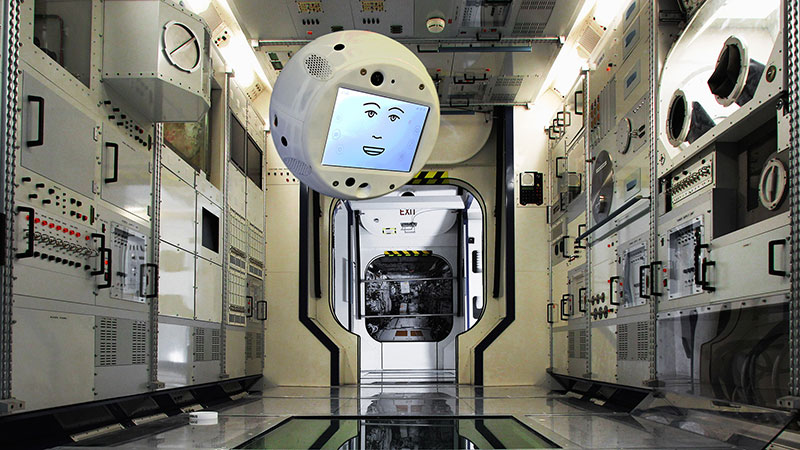
Airbus, junto con IBM, están terminando de preparar a CIMON, de Crew Interactive MObile CompanioN, o compañero móvil interactivo de la tripulación, para su lanzamiento a la Estación Espacial Internacional. Ha sido diseñado para ayudar a los astronautas a realizar trabajos...

Otro paso adelante más para el Scaled Composites Model 351, más conocido como Roc o Stratolaunch, que ya rueda a 40 nudos –unos 75 kilómetros por hora–. Estas pruebas de rodadura están destinadas a comprobar que el avión se puede maniobrar...
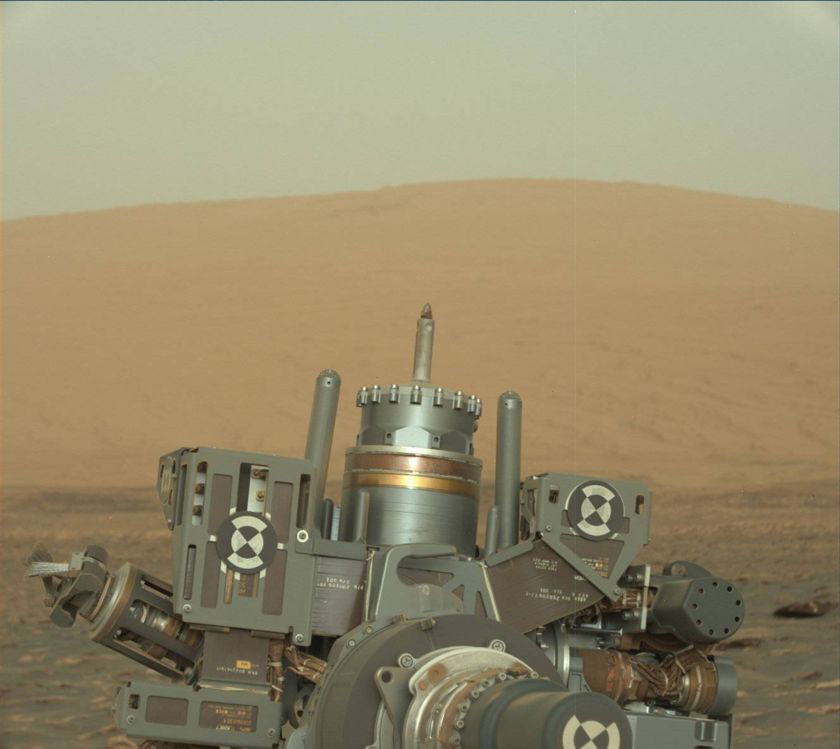
Curiosity lleva más de 500 soles –días marcianos, 40 minutos más largos que los terrestres– sin poder utilizar su taladro para tomar muestras. El procedimiento habitual para obtener muestras de una roca era que Curiosity acercaba su brazo a la roca,...
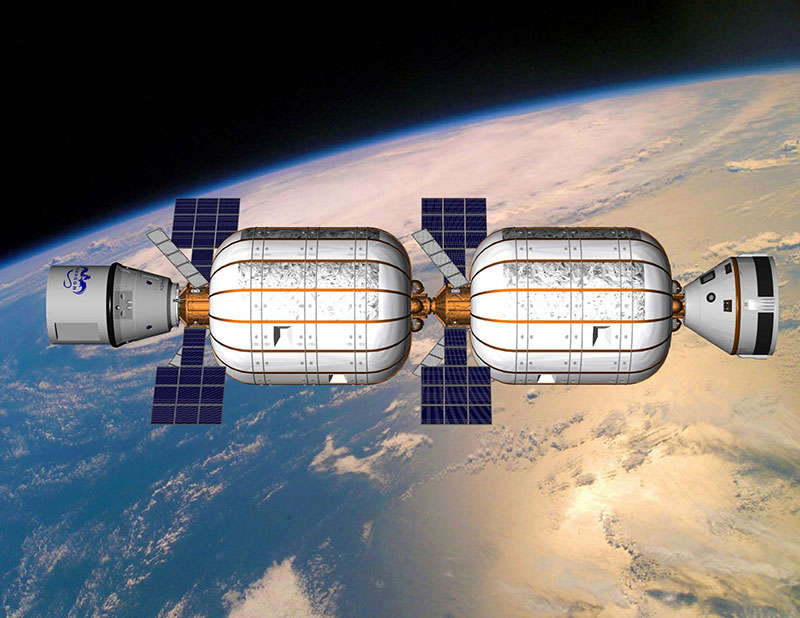
Bigelow Aerospace es la empresa fabricante del Bigelow Expandable Activity Module o Módulo de Actividad Expandible Bigelow, más conocido como BEAM, y que es uno de los módulos más sorprendentes de la Estación Espacial Internacional pues es hinchable. BEAM es un...

Eclipsada por las posteriores misiones que pusieron astronautas sobre la superficie de la Luna o por el espectacular fallo del Apollo 13, quizás el momento más glorioso de la NASA, la misión Apolo 8 es una gran desconocida. Pero los tripulantes...

El primer Ariane 5 lanzado en 2018 empezó a desviarse de la trayectoria prevista inmediatamente después de despegar, dejando su carga útil, los satélites de telecomunicaciones Al Yah 3 y SES-14 en una órbita con una inclinación distinta a la deseada aunque...

Esta semana los la NASA hizo un encendido del motor RS-25 del Sistema de Lanzamiento Espacial (SLS), alcanzando la mayor potencia de empuje hasta la fecha: el 113 por ciento, durante 50 segundos en una prueba que duró en total 260...
Por Nacho Palou -
23 FEB 2018
Aunque SpaceX no ha intentado recuperar la primera etapa del Falcon 9 con el que puso en órbita el satélite PAZ sí ha intentado la recuperación de una de las mitades de la cofia que protege la carga útil durante los...
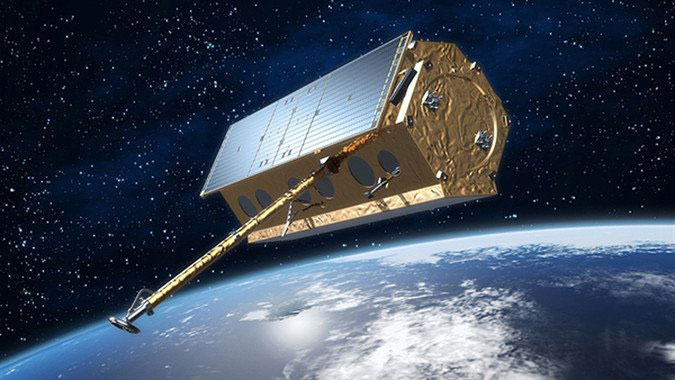
Tras unos días extra de retraso –aunque tampoco es para tanto porque llevaba más de tres años esperando por el Dnepr que había sido contratado originalmente– el satélite PAZ era finalmente puesto en órbita por un Falcon 9 que despegó del...

Space for humanity es una iniciativa que pretende enviar varios grupos de personas al límite del espacio –siendo el límite del espacio en este caso unos 32 kilómetros de altitud, con lo que oficialmente no serán astronautas– a finales de 2018....
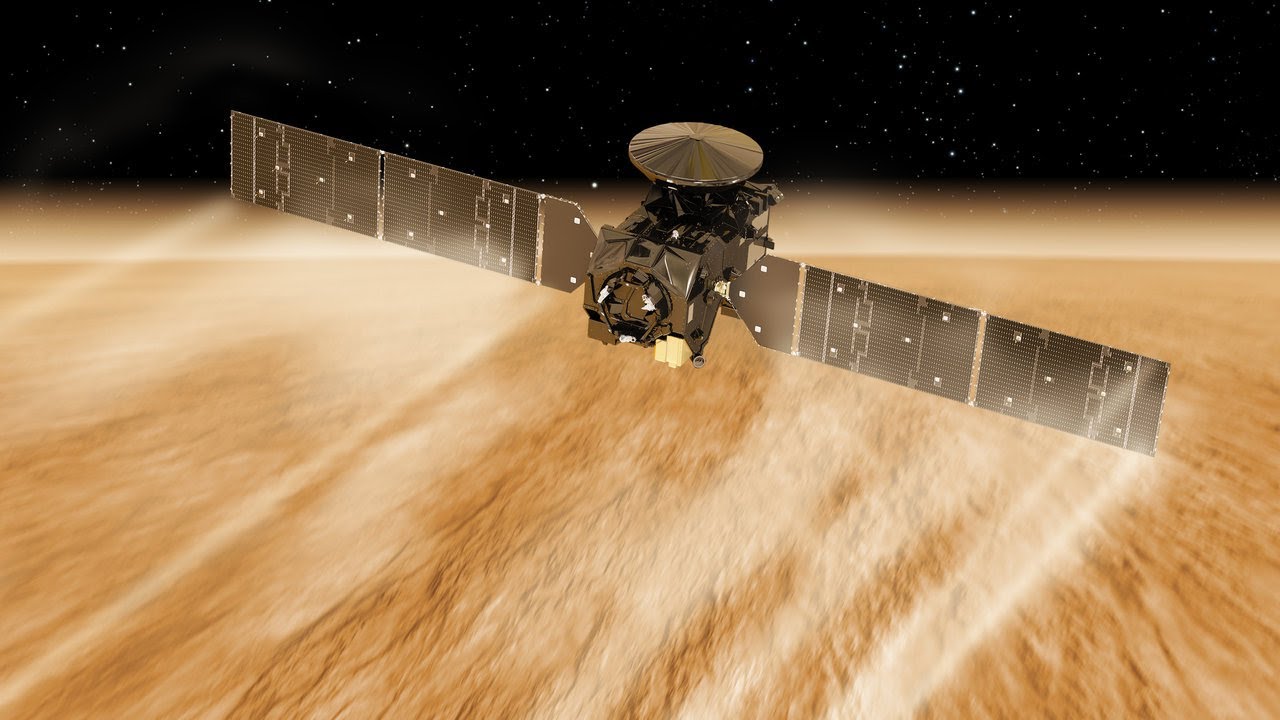
La Trace Gas Orbiter lleva en órbita alrededor de Marte desde el 19 de octubre de 2016. Pero en una órbita bastante elíptica de 98.000×200 kilómetros, muy diferente de aquella en la que tiene que estar para llevar a cabo su...

Este es el Mr. Steven, un barco que está dando mucho que hablar desde hace meses a los espaciotrastornados que siguen las andanzas de SpaceX, que lo tiene alquilado. El consenso es que será utilizado para intentar recuperar la cofia –o...

Se calcula que en estos momentos hay unas 8.000 toneladas de basura espacial en órbita alrededor de la Tierra. Son miles de objetos que van en tamaño desde el de un satélite ya no operativo al de partículas de pintura. Y...

.@Astro_sabot and I packed up Robonaut for return to Earth for repairs and refurb. We look forward to his return. pic.twitter.com/xLXGOm4KsA— Joseph M. Acaba (@AstroAcaba) 14 de febrero de 2018 Hace unos días Joe Acaba tuiteaba que él y Mark Vande Hei...

Le tenía un tanto perdida la pista al proyecto Die astronautin, que tiene como objetivo enviar a una astronauta alemana a la Estación Espacial Internacional en 2020. Pero me he acordado de él con el anuncio de que han escogido como...

El Canadarm 2, el brazo robot de la Estación Espacial Internacional, tiene sendas «manos» en cada uno de sus dos extremos –su nombre oficial es Latching End Effector o LEE– que le permiten tanto desplazarse de un lugar a otro por...
En el vídeo How does SpaceX get these amazing camera shots?, de Primal Space, explican cómo se consiguen capturar en vídeo los lanzamientos de los cohetes con imágenes tan detalladas y estables como las vistas, por ejemplo, en la reciente retransmisión...
Por Nacho Palou -
19 FEB 2018
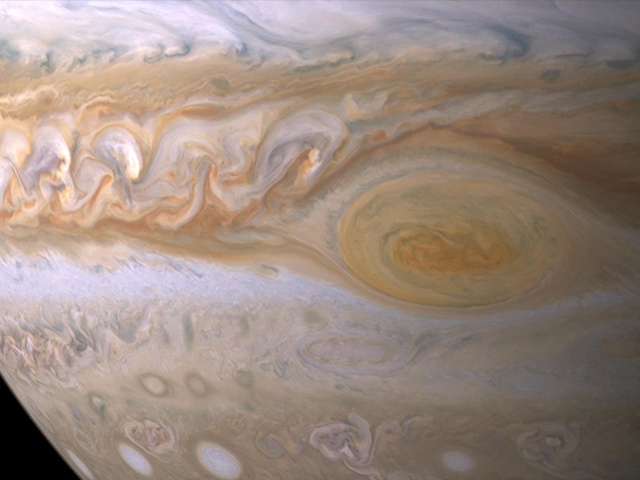
Fotografía: NASA. “Nada dura eternamente”, dice el astrónomo Glenn Orton. Y la hasta ahora conocida como la Gran Mancha Roja de Júpiter (GMR), un vórtice anticiclónico comparable a una enorme tormenta, no va a ser la excepción. Según explica Orton en Business...
Por Nacho Palou -
19 FEB 2018
Este póster de Starman (el muñeco vestido de astronauta que conduce un descapotable por el espacio) es una edición limitada de TeeChip. El póster se puede elegir en distintos tamaños, con diferentes precios (entre 15 y 20 euros), y está impreso...
Por Nacho Palou -
16 FEB 2018
Hoy, 16 de febrero de 2018, el rover Opportunity ha cumplido 5.000 soles en Marte. Hace años que su rueda frontal derecha dejó de funcionar, por lo que desde entonces se mueve por Marte marcha atrás. Su brazo robot hace tiempo...

Cuando se habla de la capacidad de carga del Falcon Heavy de SpaceX se suele dar la cifra máxima, que son 63.800 kilos a órbita baja terrestre o 26.700 a una órbita de transferencia geoestacionaria o GTO. Aunque para poder alcanzar...

La Estación Espacial Internacional está permanentemente ocupada desde el 2 de noviembre de 2000, pero esto sería imposible sin toda una flotilla de cápsulas de carga que periódicamente llevan suministros para sus tripulantes y piezas para la propia Estación y los...

Un cohete Larga Marcha 3B ponía en órbita el 12 de febrero dos nuevos satélites Beidou, el sistema de navegación por satélite chino. Son los números 28 y 29 de la constelación y pertenecen a la tercera generación, con una señal...

Fotografía: NASA/JPL-Caltech El rover de la misión Mars 2020 de la NASA devolverá al planeta Marte un trozo del meteorito conocido Sayh al Uhaymir 008 (SaU008). El propósito de la misión es menos romántico de lo que puede parecer: el trozo de...
Por Nacho Palou -
14 FEB 2018
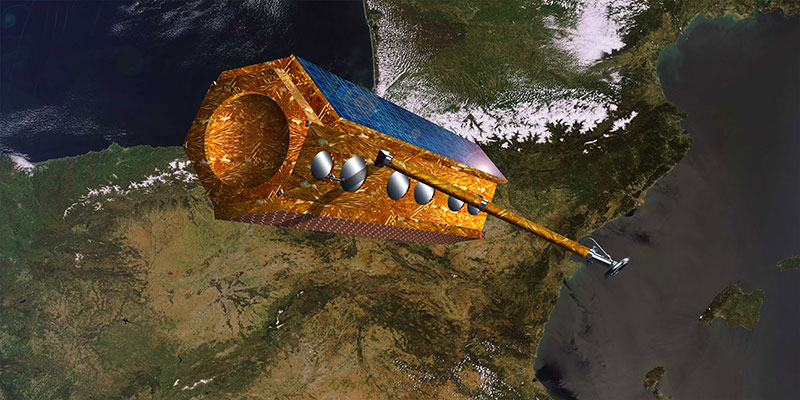
Si todo va según lo previsto SpaceX lanzará en un intervalo de cinco días dos nuevos satélites artificiales españoles, PAZ y el Hispasat 30W-6. PAZ es un satélite de observación terrestre que desde una órbita sincrónica al sol obtendrá imágenes radar independientemente...

La cápsula de carga Progress MS-08 ya viaja rumbo a la Estación Espacial Internacional tras ser lanzada a las 9:13:33, hora peninsular española, del 13 de febrero de 2018. Es el segundo intento de lanzamiento tras ser abortado en el último...

Los 27 motores del Falcon Heavy (FH), 9 por cada uno de los tres Falcon 9 (que recibe de ahí su nombre) que forman el FH. Fotografía: SpaceX. El Falcon Heavy no es el cohete más potente (el Saturno V era más...
Por Nacho Palou -
13 FEB 2018

El Tesla Roadster de Elon Musk recientemente puesto en órbita por el primer Falcon Heavy no es el primer coche eléctrico que enviamos al espacio, sino el cuarto, como bien recordaba Charlie Stross. Los otros tres son los rover del programa...
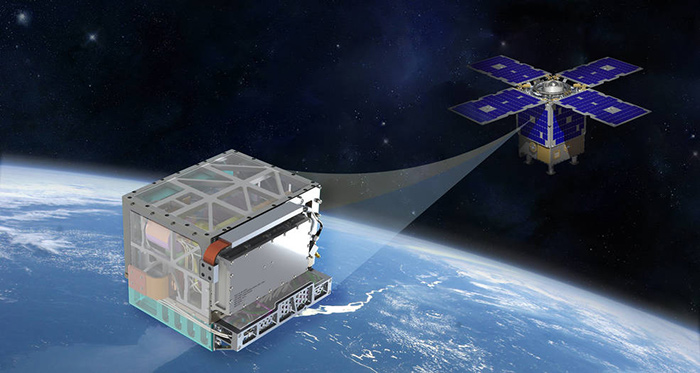
El proyecto DSAC (Deep Space Atomic Clock) de la NASA consiste en un reloj atómico de iones de mercurio miniaturizado y “ultrapreciso” que es, según la NASA, varios órdenes de magnitud más estable que cualquier de los mejores relojes de navegación...
Por Nacho Palou -
13 FEB 2018

Según se puede leer en Microlanzadores para pequeños satélites la Agencia Espacial Europea ha encargado estudios de viabilidad a cinco empresas para el desarrollo de un lanzador en miniatura económicamente viable sin el concurso de fondos públicos. La idea es que sirva...
Desde el control de la misión ya habían dado el comando de lanzamiento de la cápsula de carga Progress MS-08, algo que se hace 20 segundos antes de la ignición de los motores del cohete Soyuz, pero en el último momento...
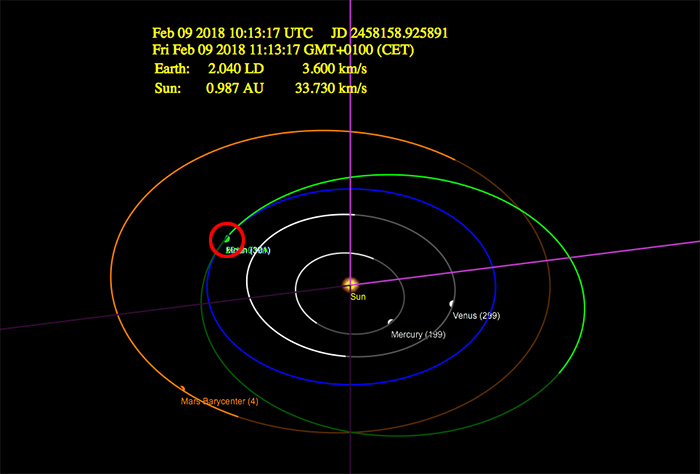
El círculo rojo es el Tesla Roadster. Imagen generada por Orbit Simulator. El Tesla Roadster lanzado el martes 6 de febrero por el Falcon Heavy ya tiene su código de identificación internacional: 2018-017A (o 43205 en el catálogo del NORAD). De modo...
Por Nacho Palou -
9 FEB 2018

El primer cohete Ariane 6 volará el julio de 2020, o al menos así está previsto. Para acomodar este cohete de nueva generación la Agencia Espacial Europea (ESA) está preparando el complejo espacial de Kourou, en la Guayana Francesa. Estos preparativos...
Por Nacho Palou -
8 FEB 2018
Cualquiera que me haya oído hablar de cuando pude ver en directo el lanzamiento del Atlantis en la última misión de los transbordadores espaciales de la NASA sabe que siempre, siempre, insisto en que lo más impresionante de la experiencia es...
El 7 de febrero de 2008 el transbordador espacial Atlantis despegaba en la misión STS-122, que tenía como objetivo principal llevar el laboratorio Columbus de la Agencia Espacial Europea a la Estación Espacial Internacional y dejarlo allí instalado. Tras un lanzamiento...
Fotografía: SDO, NASA. El Sol lleva casi dos semanas completamente libre de manchas solares, excepto por una pequeña marca que apareció el 31 de enero. Pero incluso esa pequeña mancha resulta difícil de ver en este vídeo de luz filtrada grabado a...
Por Nacho Palou -
7 FEB 2018

El aterrizaje casi sincronizado de los dos propulsores laterales del primer Falcon Heavy de la historia se acaba de hacer un hueco en la colección de imágenes históricas de la era espacial. Y es que tras varios años de retraso –y...
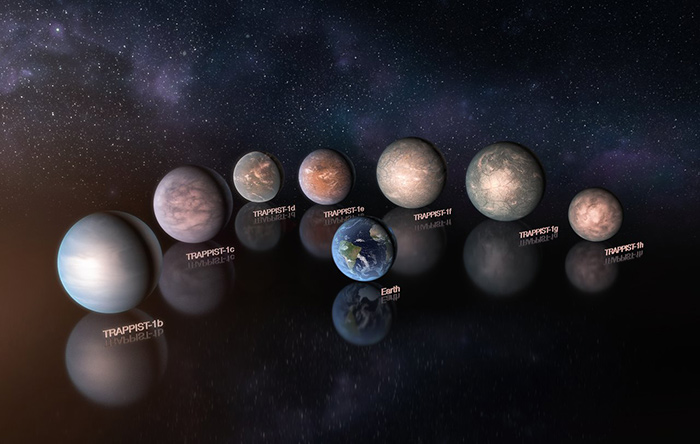
Ilustración del sistema planetario de Trappist-1 y comparación de tamaños con la Tierra. Imagen: ESO/M. Kornmesser. Según el Observatorio Europeo Austral (ESO), la organización de investigación astronómica formada por catorce países y dedicada a la astrofísica y a la operación de telescopios...
Por Nacho Palou -
6 FEB 2018

Lanzamiento del satélite IMAGE desde la base aérea de Vandenberg el 25 de marzo de 2000. La NASA perdió contacto con la sonda el 18 de diciembre de 2005. En Latest Data From IMAGE Indicates Spacecraft’s Power Functional la NASA confirma que...
Por Nacho Palou -
6 FEB 2018
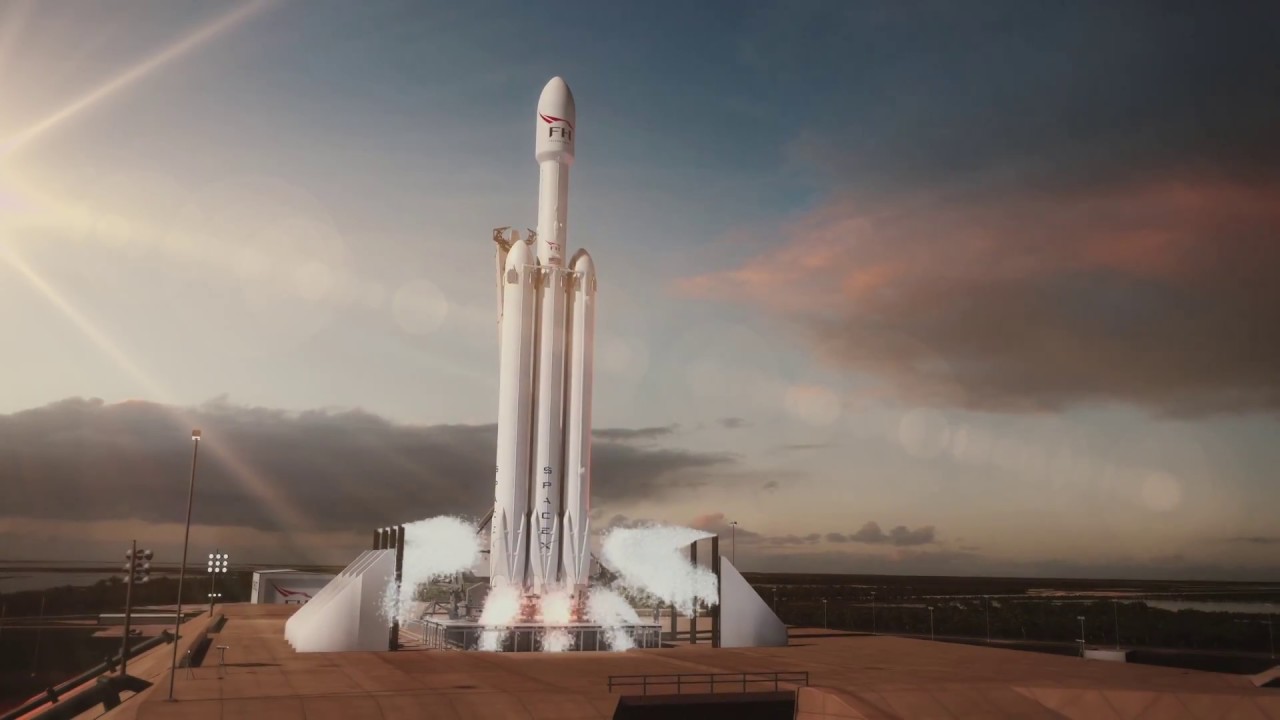
Todo está listo en el Centro Espacial Kennedy para que SpaceX intente en lanzamiento de su primer cohete Falcon Heavy a las 19:30, hora peninsular española, del 6 de febrero de 2018. La ventana de lanzamiento dura hasta las 22:30 y...

De desiertos a grandes planicies heladas pasando por mares de agua y mares de nubes, salpicado con algunas ciudades por la noche y algunas auroras boreales, Orbit es un homenaje de Seán Doran al que es por ahora nuestro único hogar...

En una de las últimas imágenes compartidas por Elon Musk en Instagram aparece un muñeco vestido con traje de astronauta a bordo del Tesla Roadster que que volará mañana al espacio lanzado por el Falcon Heavy de SpaceX, en principio y...
Por Nacho Palou -
5 FEB 2018

Cuando fue lanzado el 12 de julio de 2000 el módulo Zveda de la Estación Espacial Internacional llevaba instalados dos sistemas de comunicación vía radio, Lira y Regul. Regul sirve para transmitir directamente de y a las estaciones de tierra, mientras...

A los japoneses siempre se les ha dado muy bien lo de la miniaturización, o eso dice el tópico. Así que al segundo intento la Agencia Japonesa de Exploración Aeroespacial (JAXA) ha conseguido poner en órbita el Tricom-1R, un CubeSat de...

Un cohete Soyuz 2-1A con una etapa superior Fregat puso en órbita en la madrugada del 1 de febrero de 2018 los satélites de observación terrestre Kanopus-V números 3 y 4 y otros nueve satélites en miniatura de distintas empresas alemanas...

Unos cuatro minutos y medio han bastado a la sonda InSight de la NASA para desplegar sus dos paneles solares y así pasar una importantísima prueba antes de su lanzamiento a Marte. InSight, de Interior Exploration using Seismic Investigations, Geodesy and...

Ashwin Vasavada, uno de los científicos del equipo de Curiosity, comenta este vídeo en el que se puede contemplar una panorámica de Marte tomada por el rover desde el Cerro vera Rubin dentro de lo que la NASA sigue llamando cráter...

This rocket was meant to test very high retrothrust landing in water so it didn’t hurt the droneship, but amazingly it has survived. We will try to tow it back to shore. pic.twitter.com/hipmgdnq16— Elon Musk (@elonmusk) 31 de enero de 2018 Tras...

El satélite de comunicaciones luxemburgués GovSat-1 está ya en órbita después de haber sido lanzado a bordo de un Falcon 9 de SpaceX. Es el segundo lanzamiento del año para la empresa y el sexto en el que utiliza una primera...
La Unión Europa, mediante el Consejo Europeo para la Innovación, o EIC, ha establecido los EIC Horizon Prizes, y dentro de ellos acaba de lanzar uno para el desarrollo de un cohete para lanzamientos orbitales a bajo coste de satélites pequeños. La...

Una de las cosas que encarecen las misiones espaciales es la necesidad de usar componentes electrónicos certificados para funcionar en el espacio, donde entre otras cosas se tienen que enfrentar a un mayor bombardeo de rayos cósmicos y de las partículas...

El DSKY, de display and keyboard, pantalla y teclado, era el interfaz que los astronautas del programa Apolo usaban para comunicarse con los ordenadores de a bordo de sus naves; nada que ver con los interfaces con pantallas táctiles de las...

We were very excited and accomplished a milestone. The first vertical take-off and landing rocket was a rectangular ballistic flight in China, research & developed by LINKSPACE ! pic.twitter.com/W60RjPrXDh— Linkspace (@Linkspace_China) 9 de enero de 2018 Link Space, la empresa china que...

La sonda IMAGE preparada para su lanzamiento a principios de 2000. [Actualizado] Curiosa historia la que se recoge en Long "dead" NASA satellite discovered alive by amateur astronomer, El Centro de Vuelo Espacial Goddard de la NASA (GSFC) ha confirmado que un...
Por Nacho Palou -
29 ENE 2018
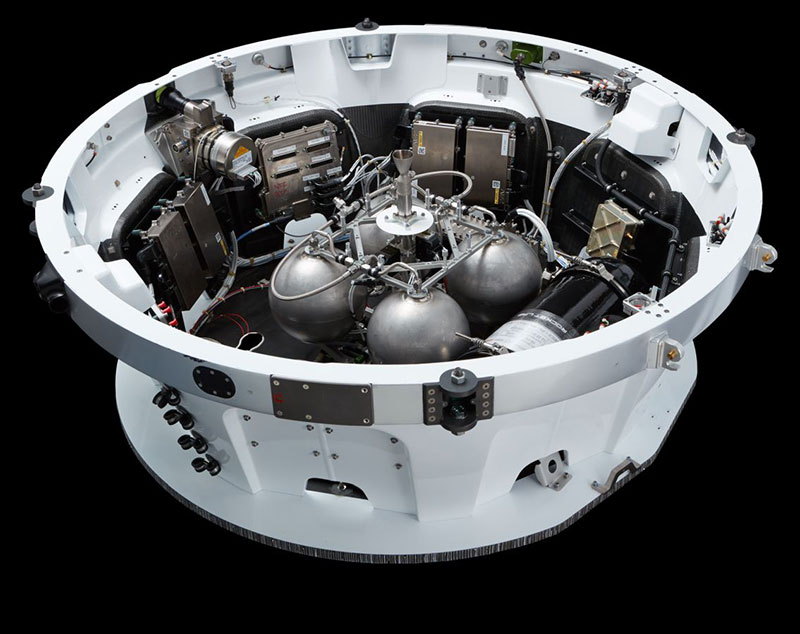
Además de la Humanity Star, el pasajero secreto y sorpresa del primer cohete Electron de Rocket Lab en entrar en órbita que está causando indignación a la comunidad científica, ese cohete escondía aún otra sorpresa más, pero en este caso de...

Hace unos días Wicho expresaba cierta aversión por la Humanity Star, el pasajero secreto y sorpresa del primer cohete de Rocket Lab. Y con motivo: básicamente se trata de un artilugio que no sirve para nada. Basura espacial (o “grafiti espacial”)...
Por Nacho Palou -
29 ENE 2018

Todo el trabajo realizado por Mark Vande Hei y Scott Tingle en el paseo espacial del 23 de enero de 2018 parecía haberse ido al garete porque la nueva «mano» que instalaron en el brazo robot de la Estación Espacial Internacional...

Además de ser el único geólogo de la historia que ha tenido la oportunidad de trabajar en otro mundo Harrison Schmitt resultó ser el único astronauta del programa Apolo alérgico a la Luna: tras una de las actividades extravehiculares de la...
Utilizado tanto para mover equipos y suministros de un lado a otro como para capturar y acoplar las naves de suministro que llegan a ella, el brazo robot de la Estación Espacial Internacional es uno de sus subsistemas que más trabajo...

La misión VA241 de Arianespace, en la que un Ariane 5 ECA tenía que poner en órbita los satélites de telecomunicaciones Al Yah 3 y SES-14, casi termina en desastre por un desvío en la trayectoria de lanzamiento que dejó ambos satélites...

Un pájaro no puede volar con una sola ala. Los vuelos espaciales tripulados no pueden progresar más sin la participación activa de las mujeres.– Valentina Tereshkova El 16 de junio de 1963 a las 9:29:52 UTC Valentina Tereshkova despegaba de la...

First static fire test of Falcon Heavy complete—one step closer to first test flight! pic.twitter.com/EZF4JOT8e4— SpaceX (@SpaceX) 24 de enero de 2018 Tras varios intentos fallidos y un parón debido al cierre temporal de la administración de los Estados Unidos al no...

Se lo tenían realmente callado, pero el Still Testing, el primer cohete Electron de Rocket Lab en entrar en órbita, llevaba una carga extra secreta aparte de un Dove de Planet Labs y dos Lemur-2 de Spire. Se trata de una...
Christa McAuliffe en 1986. El 28 de enero de 1986 el desastre del Challenger, el transbordador espacial que explotó segundos después de despegar, costó la vida a sus siete tripulantes. Uno de ellos era Christa McAuliffe, el primer civil y la primera...
Por Nacho Palou -
24 ENE 2018

El primer lanzamiento del año de SpaceX fue el del satélite Zuma, una misión clasificada para el gobierno de los Estados Unidos; probablemente algún tipo de satélite espía. Pero a las pocas horas del lanzamiento comenzaron los rumores de que Zuma,...

Lanzado en 2007, el Google Lunar X PRIZE ofrecía un premio de 20 millones de dólares al primer equipo capaz de colocar un rover en la superficie de la Luna que una vez allí fuera capaz de recorrer al menos 500...

En el verano de 2017 llegó a la Estación Espacial Internacional un instrumento conocido como Neutron star Interior Composition Explorer, o NICER, un telescopio de rayos X destinado a estudiar la composición interior de las estrellas de neutrones. Aprovechando que algunas...
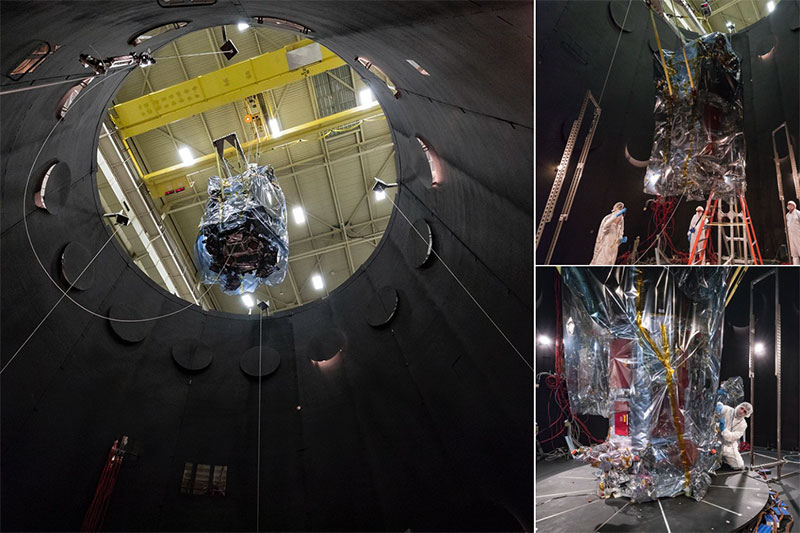
Si todo va según lo previsto la NASA lanzará la Parker Solar Probe rumbo al Sol en una ventana que va del del 31 de julio al 19 de agosto de 2018. Pero antes de eso hay que comprobar que es...
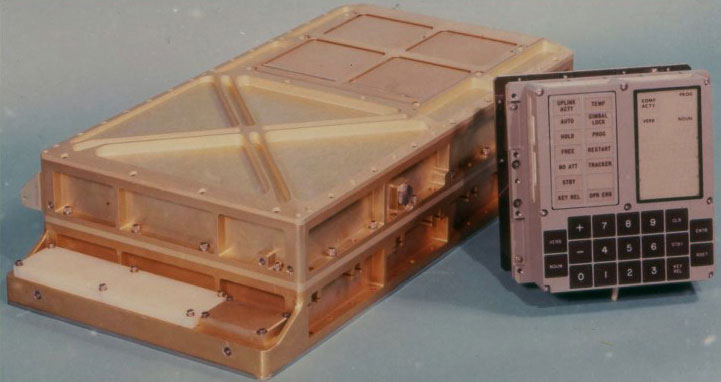
The Ultimate Apollo Guidance Computer Talk es una charla dedicada al Ordenador de Navegación del Apolo que dieron Christian Hessmann y Michael Steil en el 34º Chaos Communicacion Congress. En una hora hablan de su arquitectura, de su hardware, de sus...

El cohete Electron de Rocket Lab bautizado como Still Testing ha llevado a cabo el primer lanzamiento con éxito para esta empresa, colocando en órbita un Dove de Planet Labs y dos Lemur-2 de Spire. Este lanzamiento llega tras una campaña...

En un anuncio cuando menos inesperado la NASA acaba de comunicar que Jeanette Epps, quien hasta hace nada se estaba entrenando para volar a la Estación Espacial Internacional en la Soyuz MS-09, ha sido retirada de esa misión y que volverá...

Hace un par de días tuve la oportunidad de entrar en Esto me suena para hablar con el Ciudadano García del asunto de la basura espacial y todo lo que vamos dejando ciscado por ahí. Fue un poco a salto de...
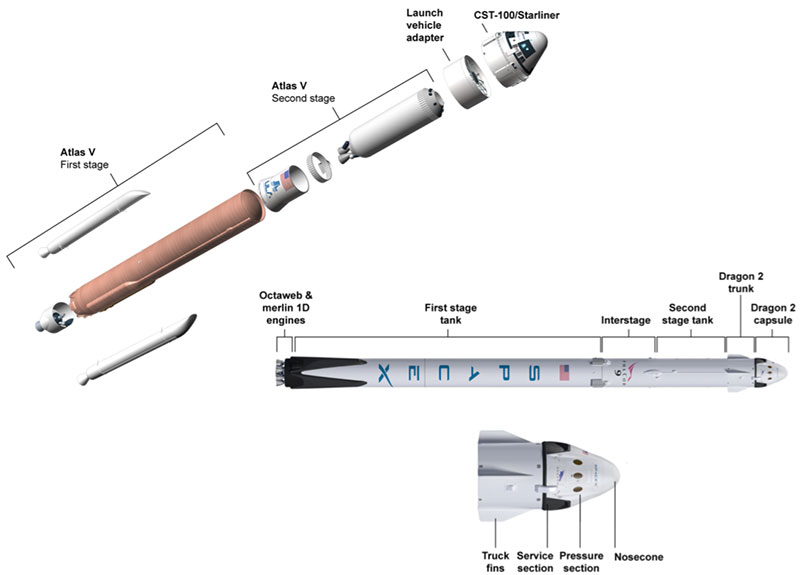
La Government Accountability Office, que es algo así como la oficina del interventor general del gobierno de los Estados Unidos, acaba de publicar un informe acerca de como ve el programa de la NASA para contratar naves privadas para enviar astronautas...

Los espaciotrastornados del todo el mundo tenemos las uñas roídas hasta el codo a fuerza de esperar la prueba estática del primer Falcon Heavy de SpaceX, anunciada originalmente para el 10 de enero de 2017, pero que se va retrasando día...

Pues creo que nunca habíamos comentado esto que decía Pedro Duque hace unos días: Resulta a primera vista sorprendente que los cohetes al salir en seguida curvan su trayectoria. La mayor parte de la energía de todo lanzamiento se usa para...
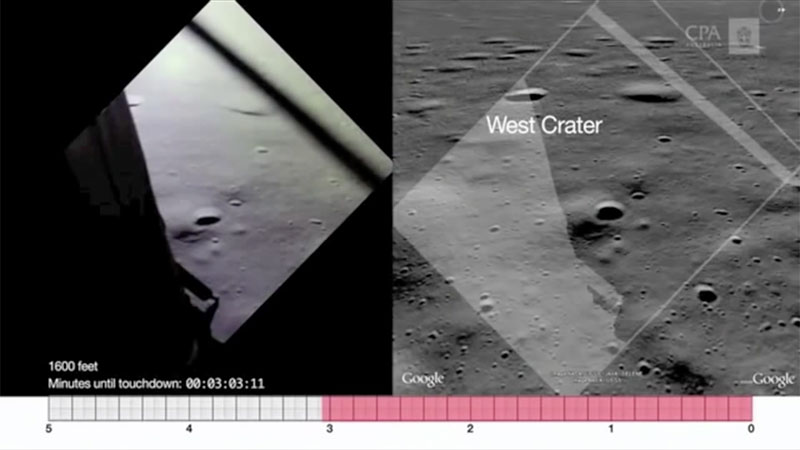
Este vídeo es de una de las últimas apariciones públicas de Neil Armstrong. En él se le oye narrar los últimos tres minutos del descenso del Eagle a la superficie de la Luna. A la izquierda se ven las imágenes originales...

El lanzamiento del satélite LKW-3 –quizás un satélite de reconocimiento, aunque no se sabe a ciencia cierta– por parte de un cohete Larga Marcha 2D desde Jiuquan marca el tercer lanzamiento con éxito para China en cinco días. Lo habían precedido...

Un amerizaje a 625 kilómetros al oeste Baja California a las 16:36 del 13 de enero de 2018 puso fin a la misión de la cápsula de carga Dragon CRS-13. Deja a bordo de la Estación Espacial Internacional 2.205 kilos que...

Aunque a la Orión, la cápsula tripulada de la NASA, le faltan años para estar lista, tanto la Crew Dragon de SpaceX como la Starliner de Boeing, con las que la agencia tiene contratadas misiones, están muy cerca de entrar en...
No conocía la historia del Snoopy de Plata, un premio con el que los astronautas de la NASA homenajean a quienes más aportan por la seguridad y el éxito de las misiones. Tiene un prestigio importante y se entrega ceremoniosamente por...

Unos trece meses después del primero la VSS Unity, la nave tripulada de Virgin Galactic construida para sustituir a la VSS Enterprise, destruida en octubre de 2014, ha llevado a cabo su séptimo vuelo libre. En esta ocasión iba cargada con...
SpaceX empezó el año con el lanzamiento de la misión clasificada Zuma para el gobierno de los Estados Unidos. Pero aunque el lanzamiento propiamente dicho parece haberse llevado a cabo con éxito parece ser que la misión ha fracasado pues por...
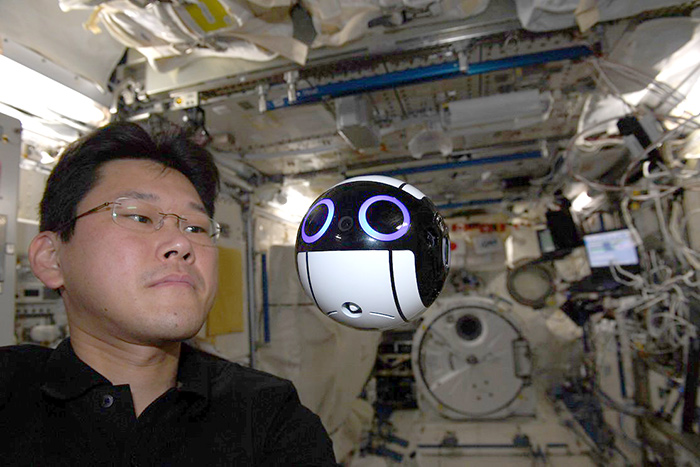
El astronauta Norishige Kanai en la ISS el pasado 3 de enero con el “droide volador” Int-Ball de la JAXA. El astronauta japonés Norishige Kanai ha tenido que disculparse después de haber asegurado que había crecido (se había estirado) 9 cm desde...
Por Nacho Palou -
10 ENE 2018

Por fin llega el momento que muchos espaciotrastornados llevamos literalmente años esperando: la primera prueba estática de un Falcon Heavy se producirá el miércoles 10 de enero de 2018 en una ventana de cuatro horas que empieza a las 19:00, hora...

El viernes pasado murió a los 87 años el astronauta John Young, uno de los grandes pioneros del espacio. El que fuera el primer comandante de un transbordador espacial (en 1981) también el noveno hombre que puso el pie en la...
Por Nacho Palou -
8 ENE 2018

Despegue de la misión y aterrizaje de la primera etapa del cohete – SpaceX Con un par de meses de retraso sobre las previsiones iniciales un Falcon 9 FT de SpaceX puso esta pasado noche en órbita la misión Zuma para el...

El 22 de agosto de 2014 una “anomalía” detectada durante el lanzamiento activó el sistema de autodestrucción de este cohete Falcon 9. En Quartz, SpaceX’s latest advantage? Blowing up its own rocket, automatically Los cohetes capaces de elevar satélites pesados al...
Por Nacho Palou -
5 ENE 2018

With more than 5 million pounds of thrust at liftoff—equal to approximately eighteen 747 aircraft at full power—Falcon Heavy will be the most powerful operational rocket in the world by a factor of two. https://t.co/NneqPRPr46 pic.twitter.com/oswCUreG6i— SpaceX (@SpaceX) 3 de enero de...

Sriram Mural preparó este vídeo para concienciar sobre el problema de la contaminación lumínica que afecta a casi cualquier ciudad o pueblo entre mediano y grande: la luz que emiten los edificios, vehículos, farolas y neones por la noche iluminan tanto...

Space Station Designer, de Polar Motion, me recuerda a Kerbal Space Program, pero centrado en la construcción de estaciones espaciales. El objetivo es que sean sostenibles económicamente y que además produzcan ciencia, igual que la EEI. Pero además tienen que generar...

Tras 27 semanas atracada en la Estación Espacial Internacional la cápsula de carga Progress MS-06 terminaba su misión con una reentrada en la atmósfera terrestre a las 5:43, hora peninsular española, del 28 de diciembre de 2017. La MS-06 dejó a...

El vídeo de Spaceflight Now nuestra cómo el cohete Falcon Heavy se coloca en posición vertical en la plataforma de lanzamiento 39A. El vídeo se reproduce a 34 veces la velocidad original — y sí, de algún modo la secuencia parece...
Por Nacho Palou -
30 DIC 2017
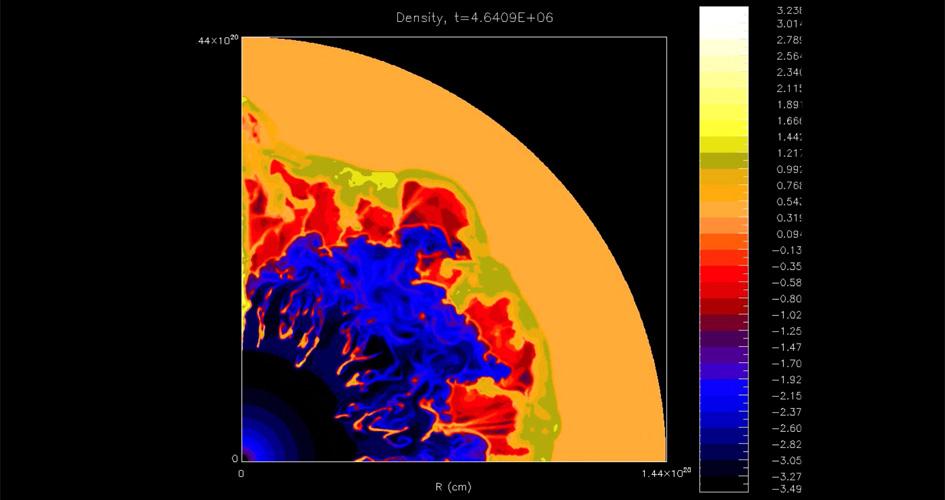
La simulación muestra cómo se forman burbujas a partir de los intensos vientos estelares de una estrella muy masiva en el transcurso de millones de años. Según investigadores de la universidad de Chicago nuestro sistema solar podría tener su origen en una...
Por Nacho Palou -
27 DIC 2017

El Cúmulo Árbol Navideño es un cúmulo abierto en la constelación de Monoceros, y está situado a 2700 años-luz del árbol navideño de tu salón. Es, según One Minute Astronomer, “un encantador grupo cónico de estrellas azules que anidan en una...
Por Nacho Palou -
26 DIC 2017

Un lanzamiento con tintes muy navideños, cruzando el cielo a toda velocidad. La misión Misión Iridium-4 lanzada en un Falcon 9 desde la Base Vandenberg de la Fuerza Aérea en California. Fue uno de los dos lanzamientos casi simultáneos de ayer....

Ha sido fruto de la casualidad pero la Agencia Japones de Exploración Aeroespacial y SpaceX han lanzado dos cohetes con 72 segundos de diferencia, lo que no es nada habitual, aunque los lanzamientos hayan sido a miles de kilómetros el uno...
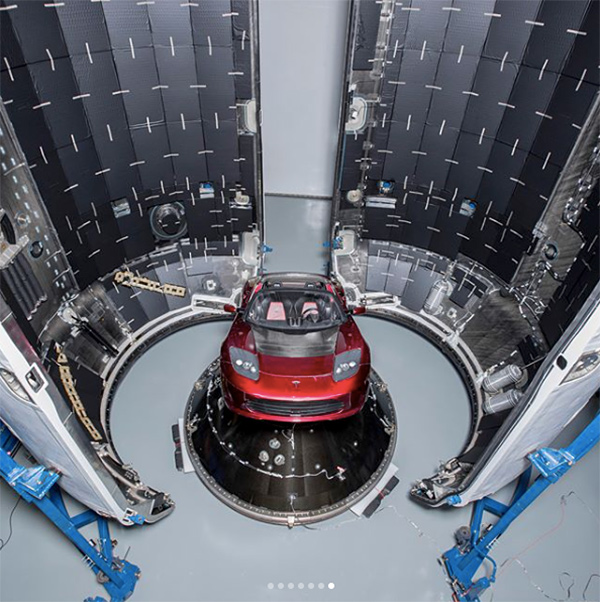
Hace unas semanas Elon Musk aseguró que el primer Falcon Heavy llevaría su Tesla Roadster a Marte. Y aquí está el Tesla Roadster rojo cereza listo para embarcar — o al menos para promocionar el lanzamiento del Falcon Heavy. Según Musk...
Por Nacho Palou -
23 DIC 2017
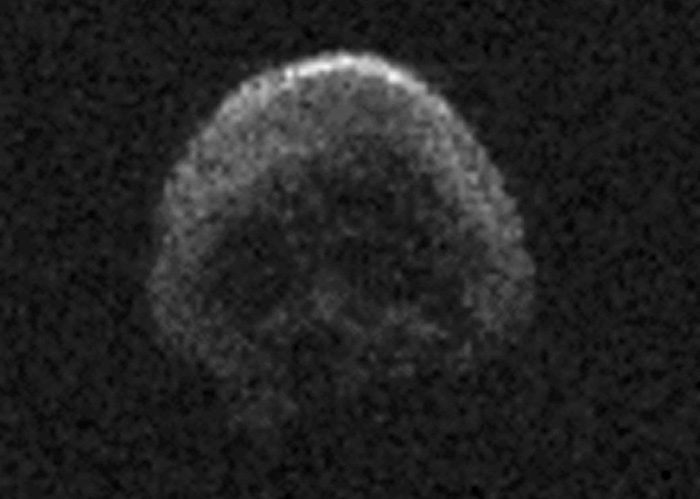
Ilustración del asteroide 2015 TB145 o “de Halloween”, que bajo determinadas condiciones de iluminación recuerda a una calavera. Imagen (cc) José Antonio Peñas / SINC. El asteroide 2015 TB145 se descubrió en 2015 y es conocido también como el “asteroide de Halloween”...
Por Nacho Palou -
22 DIC 2017
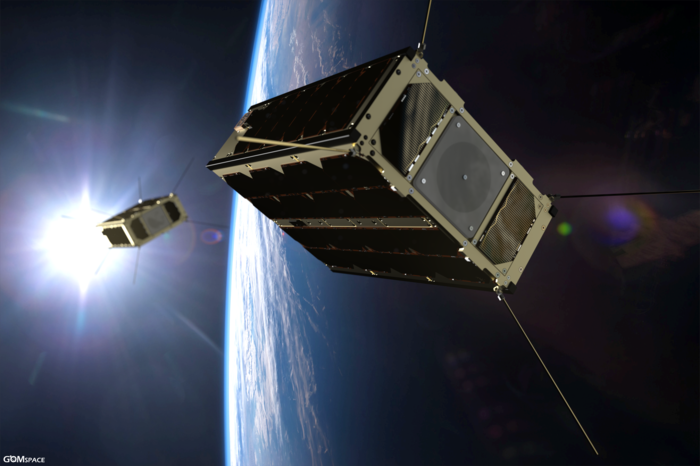
La pareja de nanosatélites GomX-4 se lanzará en febrero de 2018. Fotografía: GomSpace. Cada uno de los dos satélites GomX-4 está formado por seis unidades de CubeSat y tiene un tamaño parecido al de una caja de zapatos; el doble de tamaño...
Por Nacho Palou -
21 DIC 2017

Se han terminado los modelos 3D y las impresiones artísticas: Elon Musk ha compartido las primeras imágenes de un Falcon Heavy montado y listo para su primera misión. Se trata de un bicho de 70 metros de alto, 12 metros de...
Con el Bolero de Ravel de fondo esta pieza del Museo Americano de Historia Natural permite ver el cielo estrellado en diversas longitudes de onda, explicando cómo hay muchas más cosas de las que podemos a ver a simple vista. La...

El Scaled Composites Model 351, más conocido como Roc o Stratolaunch, está ya empezando con sus pruebas de rodadura, destinadas a comprobar que el avión se puede mover bajo el impulso de sus motores, que se puede dirigir, y que se...

Vientos por encima de los límites, una temperatura ambiente demasiado elevada que llevó a los sistemas de a bordo a abortar un lanzamiento con los motores ya encendidos, un fallo en el sistema eléctrico… Varios días seguidos de intentos fallidos de...
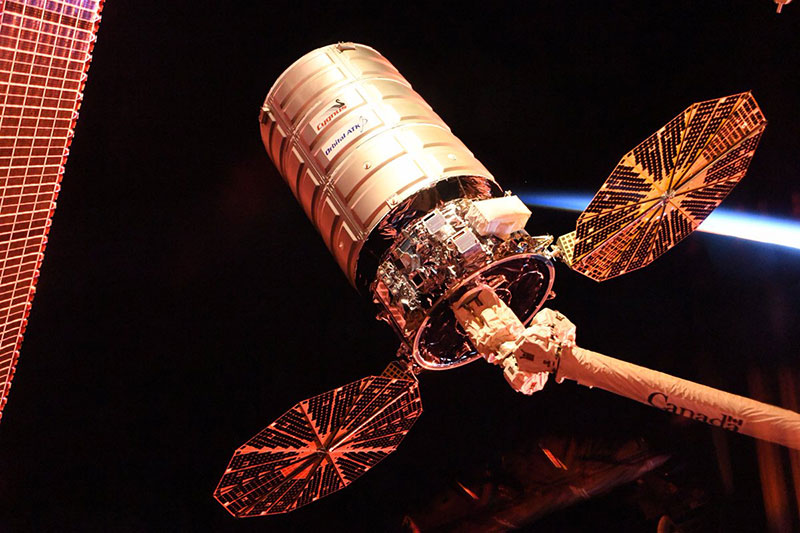
Una reentrada controlada sobre el océano Pacífico al este de Nueva Zelanda a las 13:54 del 18 de diciembre de 2017, hora peninsular española, ponía fin a la misión de la cápsula de carga Cygnus OA-8 «S. S. Gene Cernan». Llevaba...

Three space travelers docked their Soyuz spacecraft to the Rassvet module at 3:39am ET over the "boot" of Italy after launching two days earlier. https://t.co/5VwRrkYbqz pic.twitter.com/KQVmFjFrBR— Intl. Space Station (@Space_Station) 19 de diciembre de 2017 Tras un viaje de dos días a...
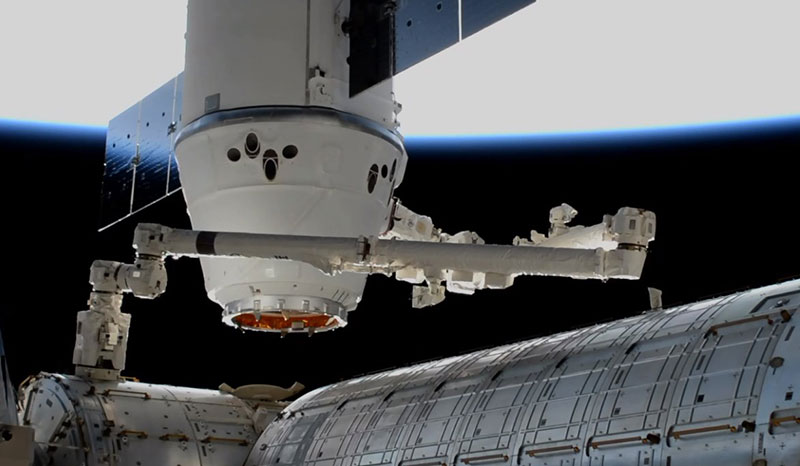
La cápsula de carga Dragon CRS-13 ya está en la Estación Espacial Internacional, a dónde ha llegado el 17 de diciembre de 2017 con una carga útil de 2.205 kilos a bordo tras haber sido lanzada el día 15. De ellos...
Blue Origin ha publicado este vídeo compuesto por tomas hechas por cámaras que iban en el interior del primer vuelo de su Crew Capsule 2.0 acompañando a Mannequin Skywalker en su viaje al límite del espacio. Mannequin iba convenientemente instrumentado para...

La Agencia Espacial Europea (ESA) ha firmado un acuerdo con ArianeGroup para desarrollar una versión de pruebas del motor de cohete de bajo coste Prometheus. Este motor de cohete utiliza como propelente una mezcla de oxígeno y metano (en lugar de la...
Por Nacho Palou -
15 DIC 2017

El llamado aterrizaje suave parece una colisión frontal entre un camión y un coche pequeño – y tú estás en el coche.– Paolo Nespoli Un «suave» aterrizaje en la estepa de Kazajistán a las 9:37 del 14 de diciembre de 2017,...

No hay todavía muchos detalles acerca de la misión, pero después de más de un año desde su anterior y espectacular prueba Blue Origin ha llevado a cabo el séptimo lanzamiento de un cohete New Shepard junto con su cápsula de...
Esta peliculita muestra a modo de pseudo-anuncio cómo sería la exploración lunar en 2040, al menos según las intenciones de ispace, un proyecto que participa en el Google Lunar XPrize. Según se narra en modo pajote mental máximo para 2040 podría...

Con el cohete y su carga útil preparados y la meteorología favorable todo está listo en el espaciopuerto de Kourou en la Guayana Francesa para el lanzamiento de cuatro nuevos satélites del sistema Galileo, previsto para las 19:36, hora peninsular española,...

El presidente Trump acaba de firmar –mira que le gusta firmar cosas– la Space Policy Directive – 1, un documento que hace política oficial de la NASA volver a poner astronautas en la superficie de la Luna, esta vez por periodos...

La parte de los avistamientos de OVNI y los contactos con alienígenas es perfectamente prescindible, pero por lo demás esta entrevista de la periodista de la CNN Rachel Crane a Robert Bigelow me parece muy interesante porque se puede ver el...

Con la prueba de motores llevada a cabo en la plataforma 40 del Centro Espacial Kennedy, SpaceX ya está lista para llevar a cabo la primera misión de suministro a la Estación Espacial Internacional en la que usará tanto una primera...
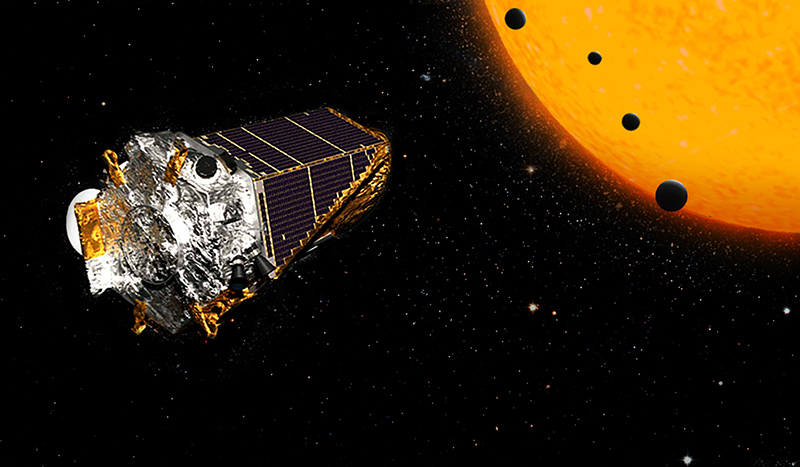
La NASA tiene prevista una conferencia para el jueves 14 (a las 18 horas, GMT) “para revelar un descubrimiento posibilitado por el telescopio espacial Kepler, que lleva buscando exoplanetas desde 2009”, según Space.com. En NASA, NASA Hosts Media Teleconference to Announce...
Por Nacho Palou -
11 DIC 2017

Todo está listo en el complejo de lanzamiento que Rocket Lab tiene en la península neozelandesa de Mahia para el despegue de su primer cohete Electron con carga útil. El Electron es un cohete construido íntegramente en materiales compuestos (fibra de...

En pocos días termina la tercera misión de Paolo Nespoli, uno de los astronautas de la Agencia Espacial Europea, bautizada como VITA, de vitalidad, innovación, tecnología y habilidad (que en inglés no lleva hache); además en italiano significa vida, en referencia...
Es todo cuestión de mecánica celeste. Comienza por aplicar las tres leyes del movimiento de Newton y luego con un buen sistema de orientación a partir de la imagen de las estrellas, una especie de versión de alta tecnología de los...
La cápsula de carga Cygnus OA-8 «Gene Cernan» fue liberada por el brazo robot de la Estación Espacial Internacional a las 14:11, hora peninsular española, del 6 de diciembre de 2017 para que comience la última etapa de su misión. El...

El 2 de diciembre de 1971 el módulo de aterrizaje de la sonda soviética Mars 3 se convertía en el primero de la historia en aterrizar suavemente en Marte, después de que su gemelo de la Mars 2 se estampara contra...

Después de que el astronauta italiano Paolo Nespoli mencionara en una retransmisión en vivo desde la ISS cuánto echaba de menos la pizza, el sábado la tripulación de la estación especial internacional tuvo ocasión de preparar y cenar pizza espacial. “Platillos...
Por Nacho Palou -
4 DIC 2017
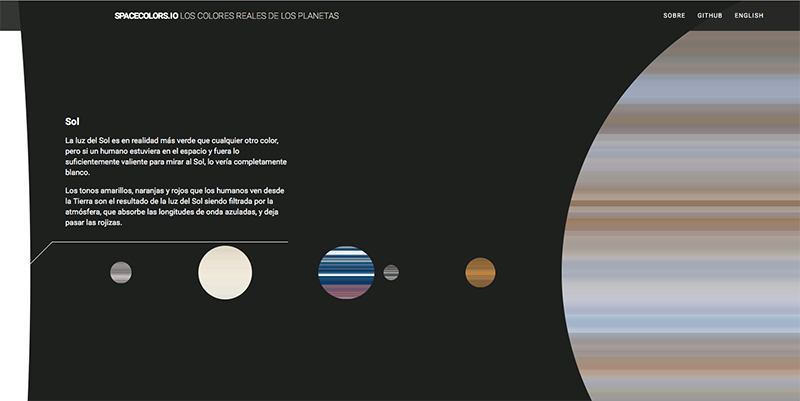
SpaceColors.io es una intento de representar cómo se mostrarían el Sol y los planetas (y Plutón) ante los ojos desnudos de los humanos. Algo que no es fácil porque normalmente las imágenes de los cuerpos se toman en distintas longitudes de...
Por Nacho Palou -
4 DIC 2017

Desde el departamento de Cómo llamar la atención,.... “La carga útil [del primer Falcon Heavy] será mi Tesla Roadster color cereza reproduciendo Space Oddity. Su destino será la órbita de Marte. Permanecerá en el espacio los próximos mil millones de años o...
Por Nacho Palou -
4 DIC 2017

Tras su histórico sobrevuelo de Plutón la sonda New Horizons de la NASA va hacia su próximo objetivo, un objeto del cinturón de Kuiper conocido con el sosísimo nombre de 2014 MU69, y es que los nombres de los asteroides son...
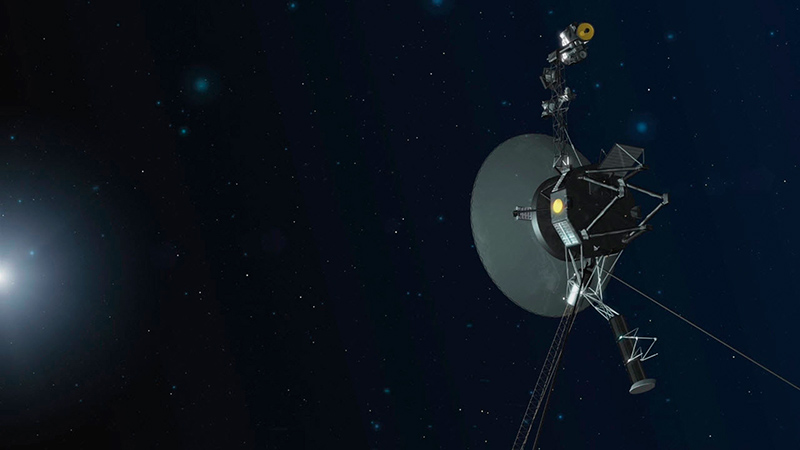
Ilustración artística de la Voyager 1 en su viaje a los confines del espacio / NASA La Voyager 1 –que anda lejos de narices a unos 21.000 millones de kilómetros de la Tierra– ha utilizado con éxito sus propulsores auxiliares para corregir...

A pesar de que Elon Musk dijo hace unos meses que el Falcon Heavy haría su primer vuelo en noviembre de 2017 al final no ha podido ser, lo que tampoco es una gran sorpresa si tenemos en cuenta que su...

El fallo que condenó a la destrucción el satélite meteorológico Meteor–M 2–1 y los 18 satélites más pequeños que lo acompañaban se produjo antes de su despegue y es bastante increíble. Y es que según se puede leer en A navigational...
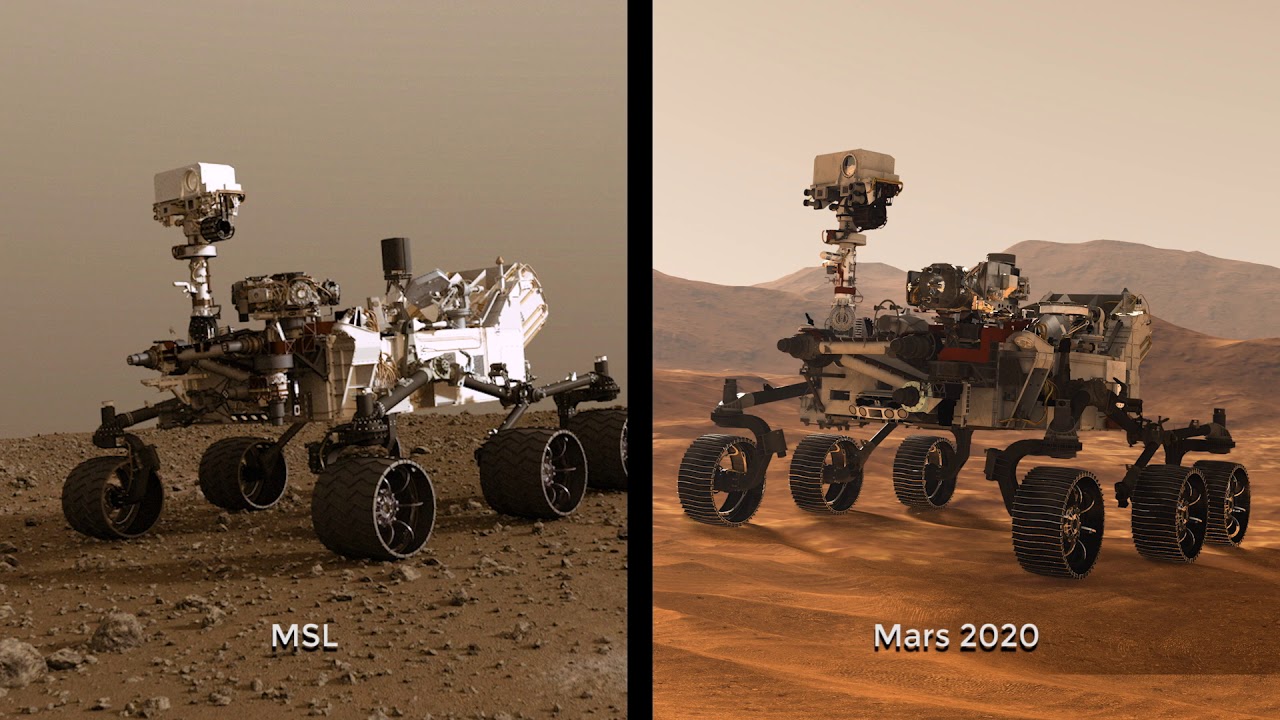
NASA Begins Building Next Mars Rover Mission es un breve resumen de la misión Mars 2020* que la NASA está preparando, que consistirá básicamente en un rover muy similar a Curiosity. El hardware, de hecho, es prácticamente idéntico al de éste,...

En 2131 cuando llegó Rama estábamos preparados y el comandante Norton y su tripulación de la Endeavour fueron a explorarla. En 2017 cuando llegó ’Oumuamua nos pilló con el culo al aire y lo único que hemos podido hacer ha sido...

Un cohete Soyuz-2.1b despegaba del cosmódromo Vostochni a las 6:41:45 del 28 de noviembre de 2017, hora peninsular española, para poner el órbita el satélite meteorológico Meteor–M 2-1 junto con otros 18 satélites más pequeños que iban de acompañantes. Pero si...
En el verano de 2017, tras más de un año instalado en la Estación Espacial Internacional sin sufrir ni una sola pérdida de aire, la NASA decidió que iba a conservar el el Bigelow Expandable Activity Module o Módulo de Actividad...

Después de haber aprobado el uso de cápsulas Dragon recicladas para llevar suministros a la Estación Espacial Internacional –la Dragon 11 fue la primera– parecía que era sólo cuestión de tiempo que la NASA aceptara también el uso de cohetes Falcon...
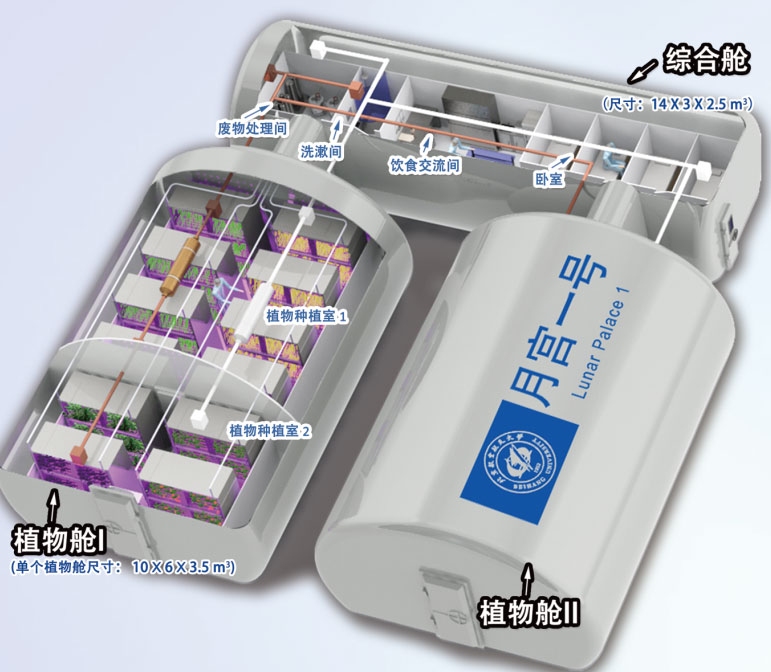
Se me había pasado por completo la puesta en marcha por parte de China de la simulación Palacio Lunar 365, que intenta mantener un sistema de soporte vital autónomo en funcionamiento durante al menos un año. Yuegong –palacio lunar en chino–...
El artista Trevor Paglen, trabajando con el Museo de Arte de Nevada, está trabajando en la construcción de lo que ellos definen como la primera escultura espacial de la historia. Orbital Reflector, primero concebido como una esfera pero ahora mutado en...
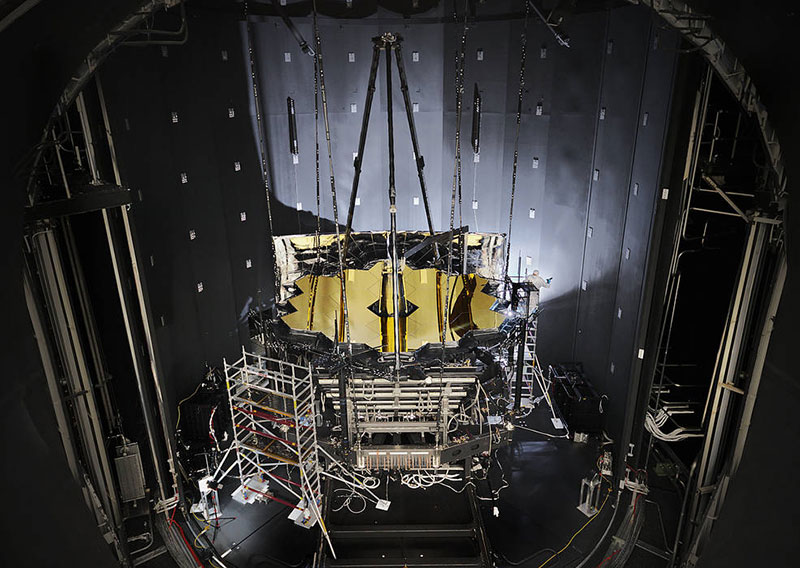
La NASA ha completado otro paso más de cara al lanzamiento del telescopio espacial James Webb –ahora previsto ya para primavera de 2019– con la finalización de las pruebas de frío en la Cámara A del Centro Espacial Johnson. Y es...

Aparte de diseñar y construir el Ariane 6, Arianespace está construyendo el complejo de lanzamiento asociado en el Puerto espacial de Kourou, bajo la denominación ELA4, de Ensemble de lancement Ariane n°4, Complejo de Lanzamiento Ariane nº 4. En este vídeo...

Nebulae, una meditación cósmica de Teun van der Zalm se presenta con una narración de Carl Sagan acerca de las nebulosas: Una nebulosa es una nube que oculta uno de los lugares secretos de la naturaleza. Es una guardería estelar, un...
Al tercer intento el penúltimo cohete Delta II de la historia despegaba para poner en órbita el satélite medioambiental JPSS-1 a las 10:47:36 del 18 de noviembre de 2017, hora peninsular española. JPSS-1, de Joint Polar Satellite System-1, es un satélite...

El pasado día 5 de noviembre astronauta Paolo Nespoli tuvo ocasión de captar en vídeo la entrada en la atmósfera de un meteoroide y el meteoro causado al quemarse por la fricción con el aire. La bola de fuego está causada...
Por Nacho Palou -
17 NOV 2017

Nos han contado los organizadores del Festival Sónar muchos detalles interesantes de la iniciativa Sónar Calling GJ273b, un acto medio-musical medio-astronómico que están llevando a cabo, en el que han realizado una especie de «llamada a muy larga distancia» a la...

#История: 15 ноября 1988 г. был произведен запуск многоразовой транспортной космической системы «Энергия-Буран» https://t.co/4eyWC6dN5b pic.twitter.com/X1K6ThRtHq— РОСКОСМОС (@roscosmos) 15 de noviembre de 2017 El 15 de noviembre de 1988 la Unión Soviética llevó a cabo el único lanzamiento del transbordador espacial Burán en...

El 6 de agosto de 2012 el rover Curiosity aterrizó en Marte de una pieza tras un espectacular y complicado descenso en el que jugó un papel fundamental un paracaídas diseñado para abrirse a velocidades supersónicas Así que como la NASA...

Aunque tiene sus oficinas y factoría en California todos los motores que fabrica SpaceX, así como los Falcon 9 que utiliza para los lanzamientos pasan por las instalaciones de prueba que la empresa tiene en McGregor, Texas. También es dónde se...

Si tienes –o crees tener– dotes artísticas la Agencia Espacial Europea te invita a enviar al espacio, aunque brevemente, una de tus creaciones. Está en marcha un concurso para escoger el diseño que decorará la cofia que protegerá al telescopio espacial...
Con unos diez minutos de retraso sobre el horario previsto Paolo Nespoli capturaba la cápsula de carga Cygnus OA-8 S.S. Eugene Cernan con el brazo robot de la Estación Espacial Internacional a las 11:04 del 14 e noviembre de 2017, hora...
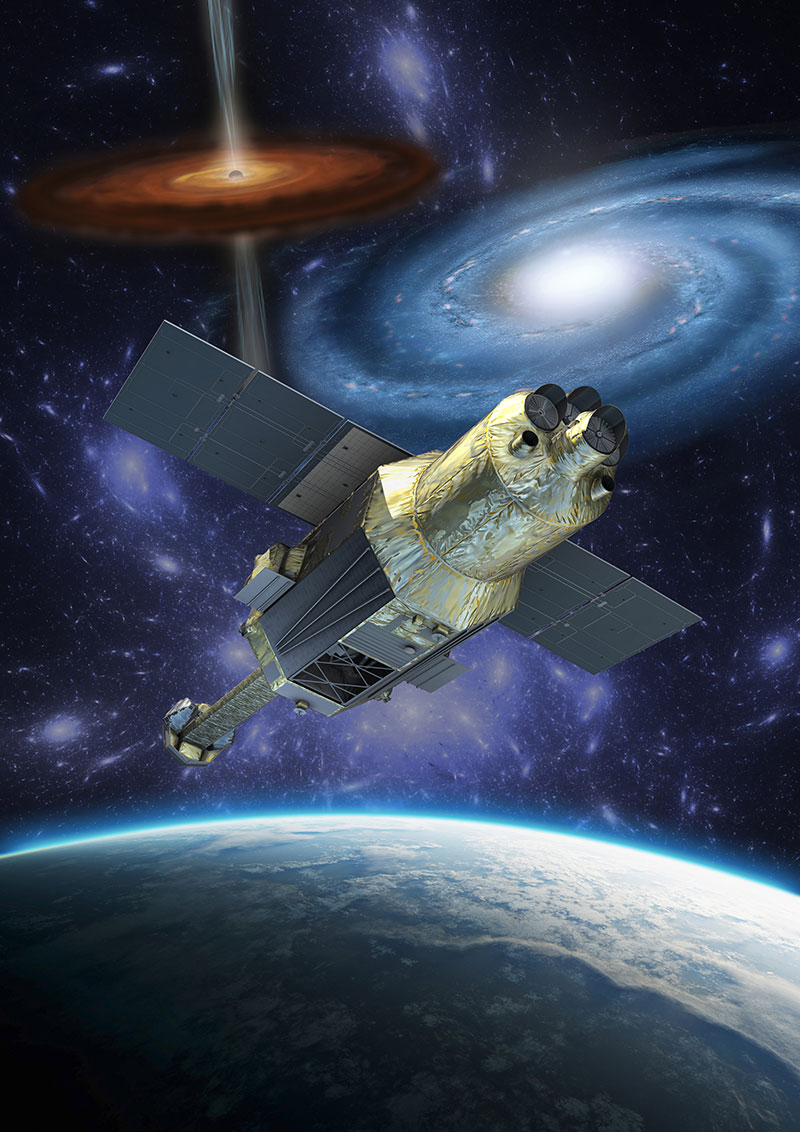
Un cúmulo de circunstancias desafortunadas y de malas decisiones destrozaron en órbita el telescopio espacial Hitomi apenas 38 días después de haber sido lanzado, cuando aún estaba en la fase de calibración de sus sistemas e instrumentos. Eso dio al traste con...

Son un poco lentos los chicos de Sierra Nevada Corp. publicando sus cositas, en especial teniendo en cuenta que en este caso el vuelo de prueba fue un éxito total, pero al fin tenemos vídeo del segundo vuelo libre y aterrizaje...
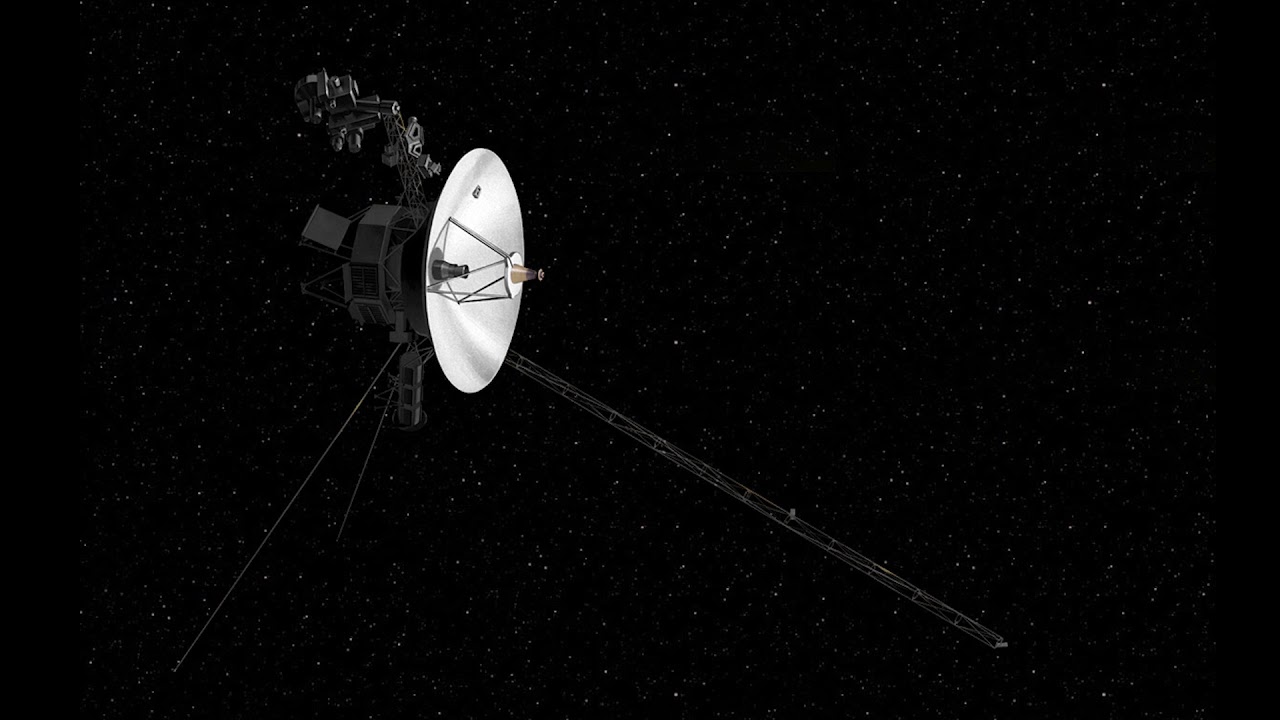
Con datos recibidos de la sonda Voyager 1, lanzada en 1977 y actualmente viajando a 17.043 km/h por el espacio interestelar –literalmente, más allá de donde Cristo dio las tres voces– Domenico Vicinanza y Genevieve Williams, de la Universidad Anglia Ruskin...
Lanzado el 25 de agosto de 2003 el telescopio espacial Spitzer aún mantiene uno de sus instrumentos en funcionamiento –los otros dos ya no funcionan al haberse agotado el helio líquido que los mantenía refrigerados, aunque duró más de lo previsto–...
Aunque SpaceX no ha dado ningún tipo de información oficial acerca de él –o de ella– mientras buscaba imágenes para ilustrar el tamaño de la primera etapa de un Falcon 9 descubrí la existencia de una especie de robot o base...
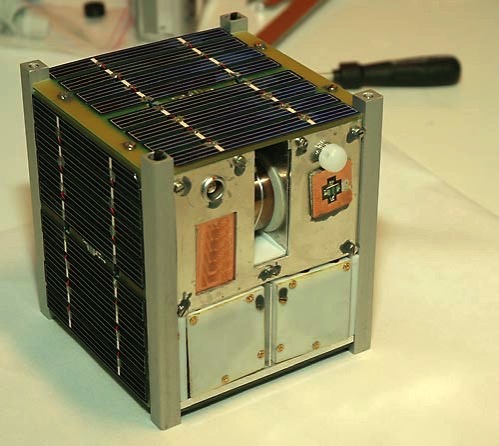
Asgardia, formalmente conocido como Reino Espacial de Asgardia, es una propuesta de nación que aspira a existir en el espacio “fuera del control de las naciones” (lo cual es complicado porque toda actividad en el espacio está sometida al Tratado sobre el...
Por Nacho Palou -
13 NOV 2017

Este pasado fin de semana el avión espacial Dream Chaser de Sierra Nevada Corp. llevaba a cabo su segundo vuelo libre tras ser soltado por un helicóptero. Y a diferencia del primero, en 2013, que terminó en unas cuantas vueltas de...

Hubo unos minutos de ansiedad por culpa de la aparición de dos lanchas rápidas que iban hacia la zona de exclusión marítima que protege la plataforma de lanzamiento, por lo que hubo que retrasar el lanzamiento hasta el último momento posible…...
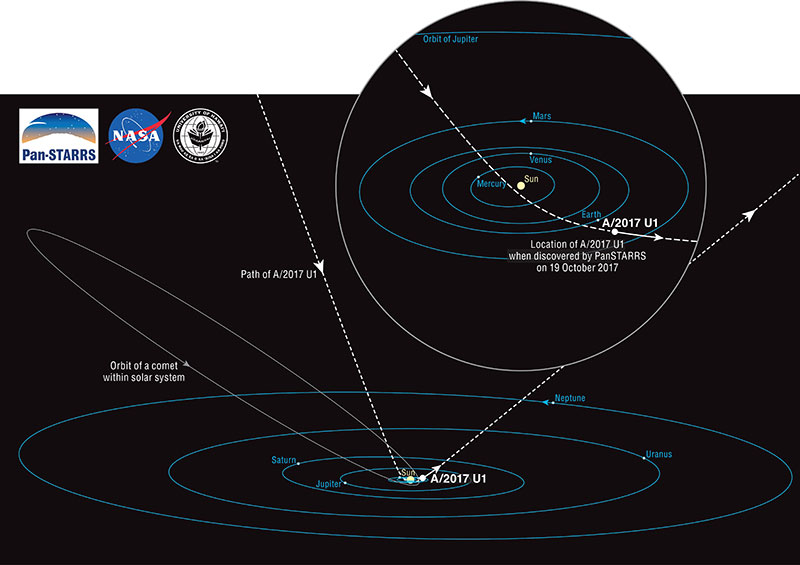
El 19 de octubre de 2017 Robert Weryk, trabajando con observaciones hechas por el telescopio Pan-STARRS, descubrió lo que resultó ser el primer asteroide que vemos pasar por el sistema solar que viene del espacio interestelar. Si se hubiera tratado de...

Orbital ATK tenía todo listo para el lanzamiento de la cápsula de carga Cygnus 8, bautizada como S.S. Gene Cernan, rumbo a la Estación Espacial Internacional cuando, a menos de dos minutos del encendido de los motores del cohete Antares que...
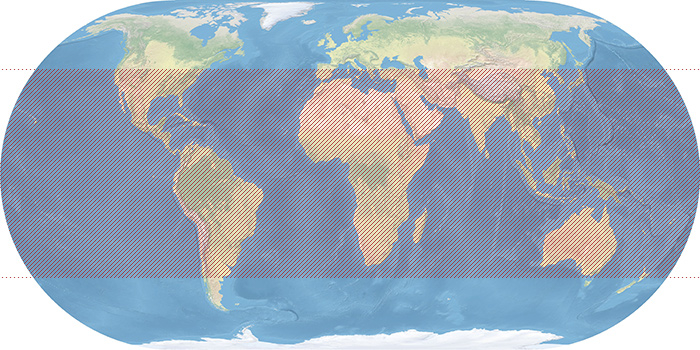
La Agencia Espacial Europea (ESA) ha iniciado una campaña internacional para hacer un seguimiento de la reentrada descontrolada de la estación espacial china Tiangong-1. Por si acaso, ya que está previsto que la mayor parte de la estructura espacial se queme...
Por Nacho Palou -
10 NOV 2017
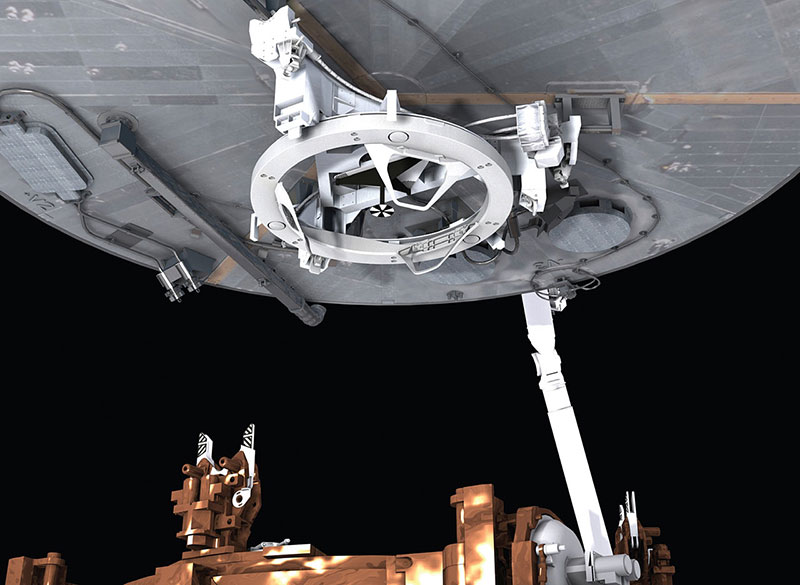
Hace poco un artículo de Forbes hablaba del final del telescopio espacial Hubble, que si nadie lo remedia terminará incinerándose en la atmósfera en algún momento de los próximos 10, 15 o 20 años. Pero en realidad esto no tiene por...
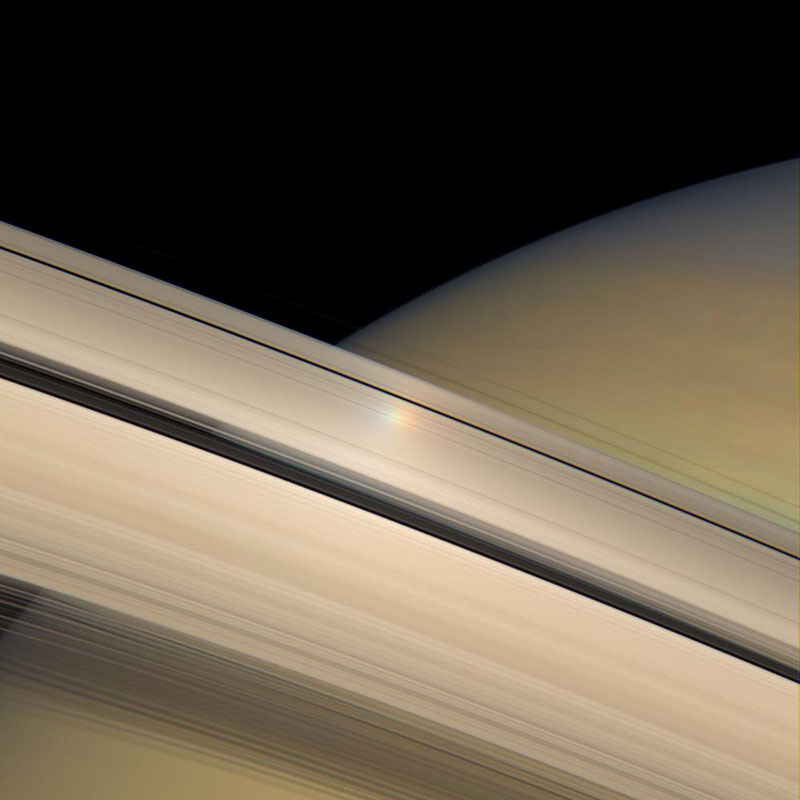
Me ha encantado Rainbow on the Rings, una imagen de los anillos de Saturno capturada por nuestra añorada Cassini el 12 de junio de 2007. Se ve una especie de arcoiris en ellos… Aunque en realidad no estaba allí. O al...
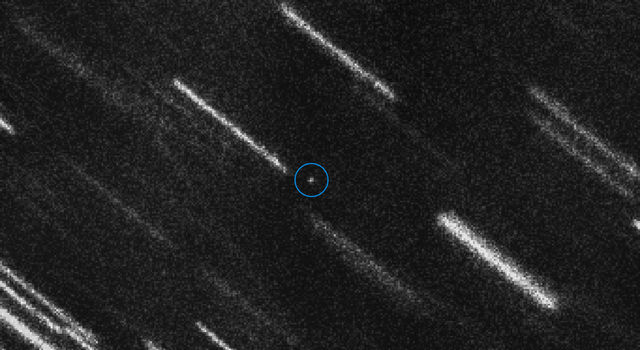
La International Asteroid Warning Network es un intento por coordinar a escala global, con la implicación de astrónomos de todo el mundo, el seguimiento de asteroides potencialmente peligrosos para la Tierra. Liderado por la NASA, la red de seguimiento ha completado...
Por Nacho Palou -
8 NOV 2017
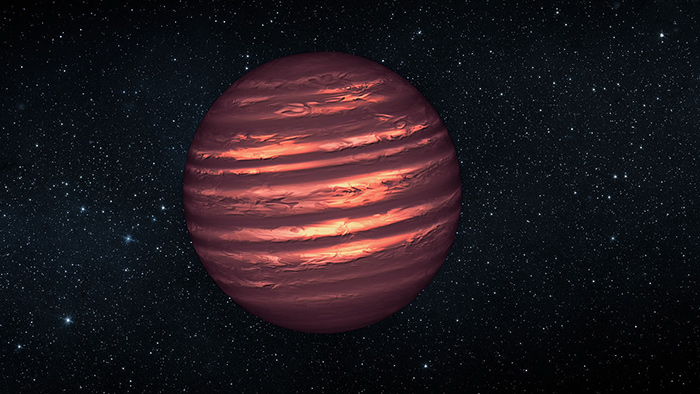
Esta cosa es la “concepción artística” de una enana marrón, un objeto que tiene más masa y es más caliente que los planetas más grandes y más calientes, pero cuya masa a la vez es insuficiente para hacer que se “encienda” como...
Por Nacho Palou -
8 NOV 2017

Siempre digo que SpaceX nos está acostumbrando mal con los aterrizajes con éxito de las primeras etapas de los cohetes Falcon 9 que utiliza para sus lanzamientos. Hacen parecer sencillo hacerlos volver desde 100 kilómetros de altitud a más de veinte...
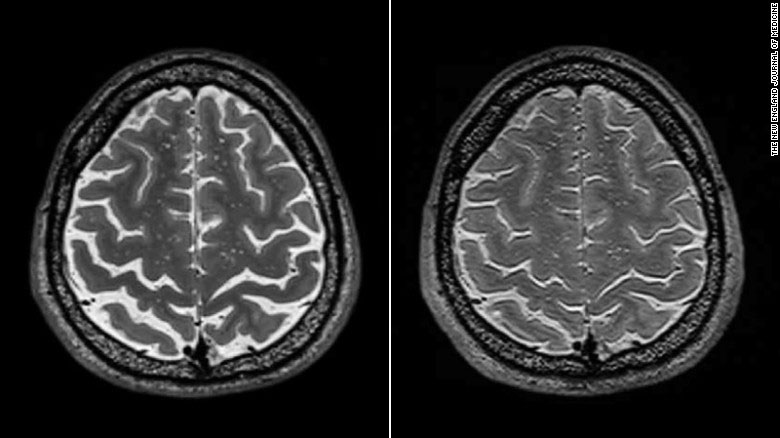
Aunque parece un poco contraintuitivo un estudio con 34 astronautas indica que estar en caída libre comprime su cerebro, tal y como se puede leer en Effects of Spaceflight on Astronaut Brain Structure as Indicated on MRI [PDF]. La causa principal...
Teniendo en cuenta los resultados que está obteniendo China en los últimos años con su programa espacial hay que tomarse en serio casi cualquier declaración al respecto que venga de sus responsables… pero algunas cosas se antojan demasiado optimistas. Como por ejemplo...

El telescopio espacial James Webb, cuyo lanzamiento está previsto para 2018, estará en órbita en el punto de Lagrange L2, a unos 1,5 millones de kilómetros de la Tierra, con lo que es imposible que con las naves de las que...

Orbital ATK, la empresa que fabrica las cápsulas de carga Cygnus, tiene también un cohete llamado Pegasus que se lanza desde el Stargazer, un Lockheed L-1011 Tristar convenientemente modificado para este propósito. El Pegasus existe también en una versión de lanzamiento...

Una de las mejores cosas de la misión de Curiosity en Marte, al menos para los legos, es que la cantidad de imágenes que produce para nuestro disfrute. Además las imágenes están a disposición del público según van llegando, con lo...

Una publicación compartida de Michael Seeley (@mseeley20) el 18 de Jul de 2016 a la(s) 1:50 PDT Esta fotografía de @mseeley20 recoge el lanzamiento del cohete Falcon 9 de SpaceX el pasado 18 de julio, desde Cabo Cañaveral. El cohete lanzó...
Por Nacho Palou -
2 NOV 2017

Aunque ya habíamos visto fotografías de las lanzaderas soviéticas cogiendo polvo en un hangar, en esta ocasión la gente de Exploring the Unbeaten Path se coló el pasado verano, cámara de vídeo en mano, en el cosmódromo de Baikonur. Allí yace...
Por Nacho Palou -
2 NOV 2017
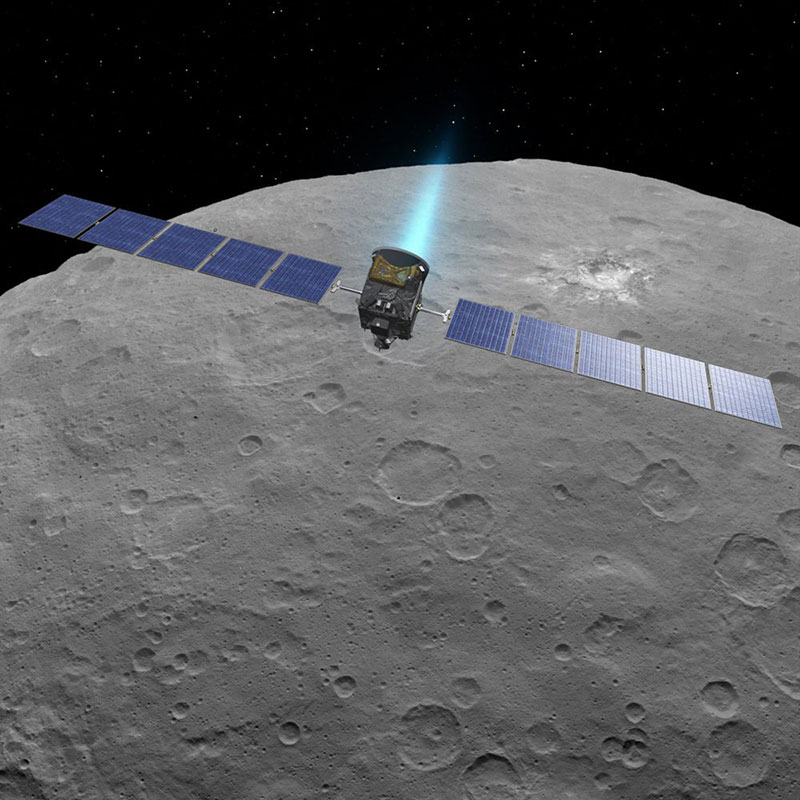
Lanzada el 27 de septiembre de 2007, la sonda Dawn de la NASA estuvo en órbita alrededor del asteroide Vesta, el segundo objeto con más masa del cinturón de asteroides y el tercero en tamaño, entre 2011 y 2012. Después partió...

Me ha parecido curioso lo que cuenta la Agencia Espacial Europea en AMT4SentinelFRM: comparing measurements with measurements acerca de cómo se calibran los resultados obtenidos por los instrumentos que van a bordo del satélite medioambiental Sentinel 3. El Sentinel 3 está...

La caja de Lego bautizada como Women of NASA, nacida de una propuesta de 20tauri, sale a la venta el 1 de noviembre de 2017, y tiene pinta de ser de esas que se agotan en cero coma nada, así que...
Cheops, de CHaracterising ExOPlanets Satellite, o Satélite para la Caracterización de Exoplanetas, es un telescopio espacial que la Agencia Espacial Europea está preparando para su lanzamiento en 2018. Monta un telescopio Ritchey-Chrétien de 30 cm de apertura y 1,2 m de...
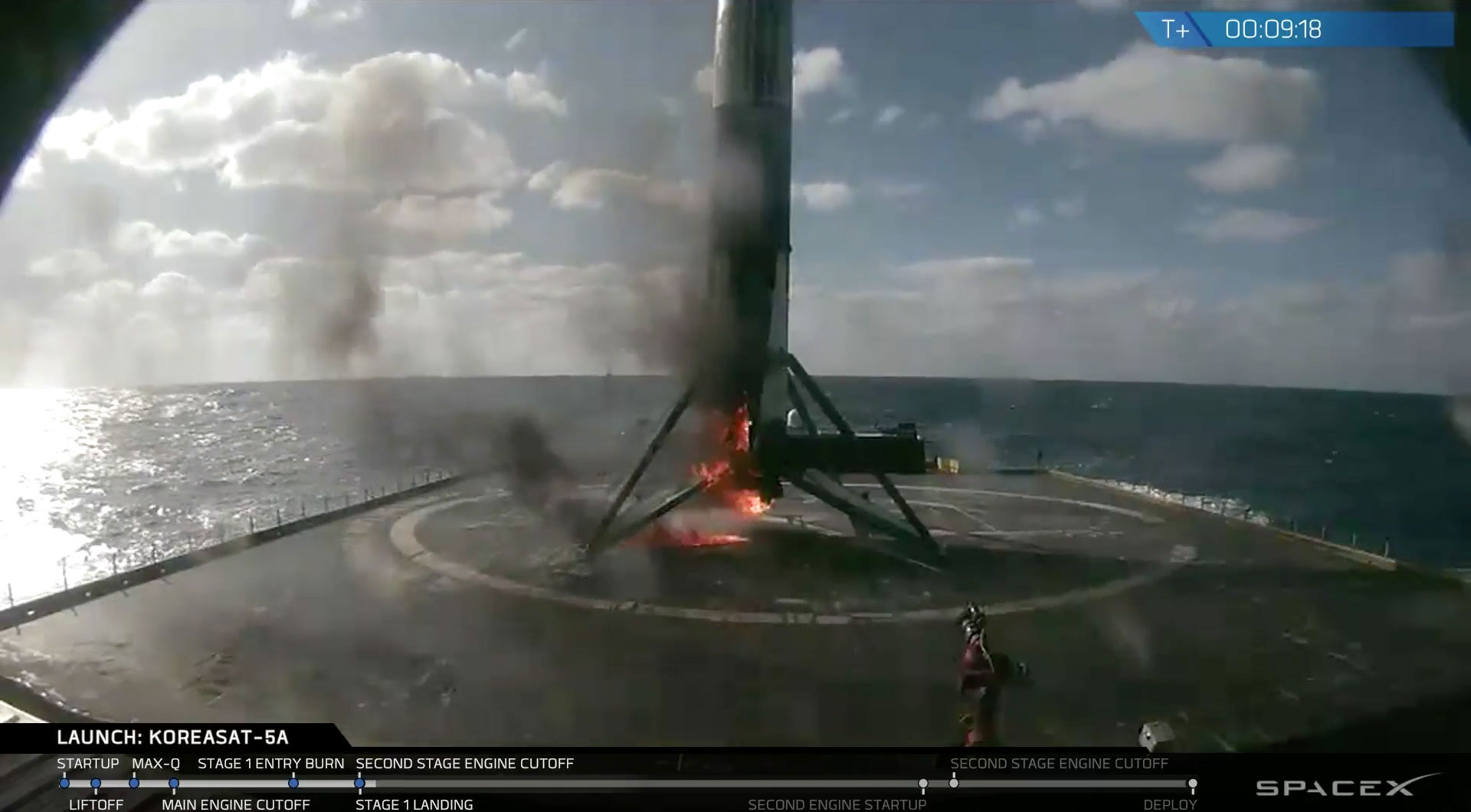
El Falcon 9 FT con número de serie 1042 y su segunda etapa han colocado sin problemas el satélite de telecomunicaciones KoreaSat-5A en su órbita de transferencia geoestacionaria tras un lanzamiento de libro desde la histórica plataforma 39A del Centro Espacial...
Creado para el World Science Festival Where are they now? es un póster recoge todas y cada una de las misiones espaciales activas más allá de la órbita terrestre en octubre de 2017. Y sirve como un buen recordatorio de que aunque...
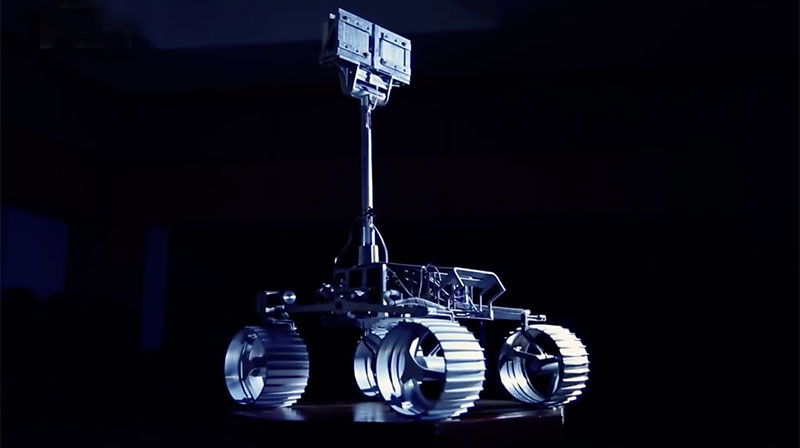
La primera misión de la India a la Luna fue la Chandrayaan-1, que la orbitó durante 312 días antes de que se perdiera el contacto con ella aún cuando la duración de la misión estaba prevista en dos años. Pero India...
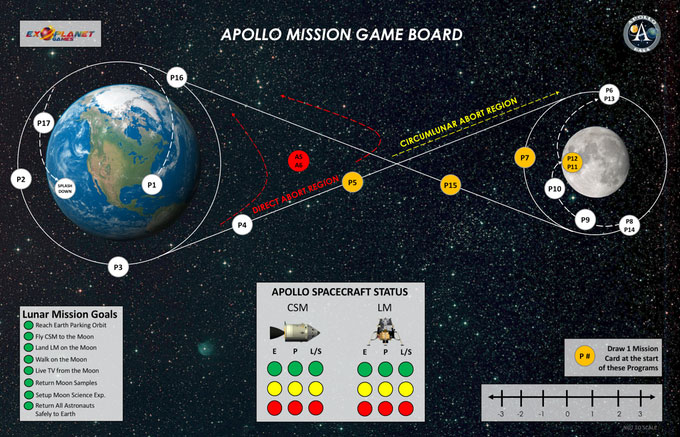
Apollo: The Game of Our First Voyages to the Moon es un juego de sobremesa sobre el programa Apolo de la NASA que en estos momentos está buscando financiación en Kickstarter. La idea es que los jugadores vayan reproduciendo las misiones...
De la página de la Wikipedia sobre A/2017 U1: A/2017 U1* (anteriormente C/2017 U1 (PANSTARRS)) es un objeto aparentemente interestelar que está pasando por el Sistema Solar. Fue descubierto en una órbita hiperbólica altamente excéntrica por Robert Weryk el 19 de...
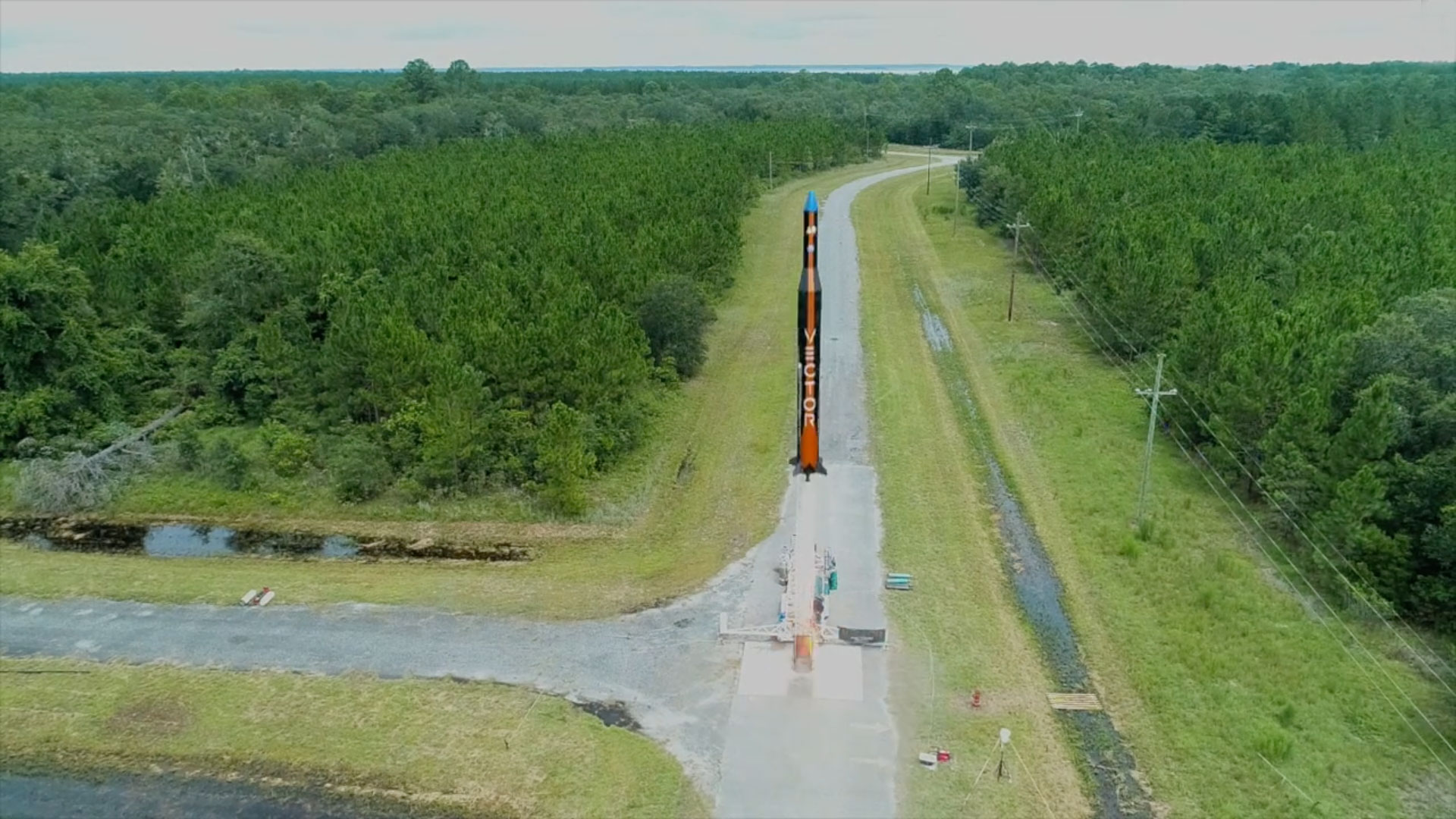
Vector Space Systems es una pequeña empresa que busca hacerse un hueco en el mercado de los lanzamientos de pequeños satélites. Para ello cuenta con dos tipos de cohete, el Vector-R, de Rapide, y el Vector-H, de Heavy. El primero está...

Según Huang Jun, un profesor de la Universidad de Aeronáutica y astronáutica de Beijing, China está a punto de comenzar el desarrollo del Larga Marcha 9, un cohete con la capacidad de poner 140 toneladas en órbita baja terrestre y 50...

Space that never was es un proyecto de Maciej Rebisz en el que recoge una serie de ilustraciones que describen un mundo en el que la carrera espacial nunca terminó, «un mundo en el que las agencias espaciales tuvieron mucho más...

El 23 de octubre de 1979 The Police grababa en el Centro Espacial Kennedy el videoclip de su canción Walking on the moon utilizando como atrezzo* un cohete Saturno V. En concreto se trataba del que fue construido para la misión...
Access Mars es un “experimento” de realidad virtual vía web desarrollado por Goolge y por la NASA que permite “explorar en 3D una réplica de la superficie de Marte, tal cual la captó con fotografías digitales el rover Curiosity.” Las imágenes...
Por Nacho Palou -
23 OCT 2017
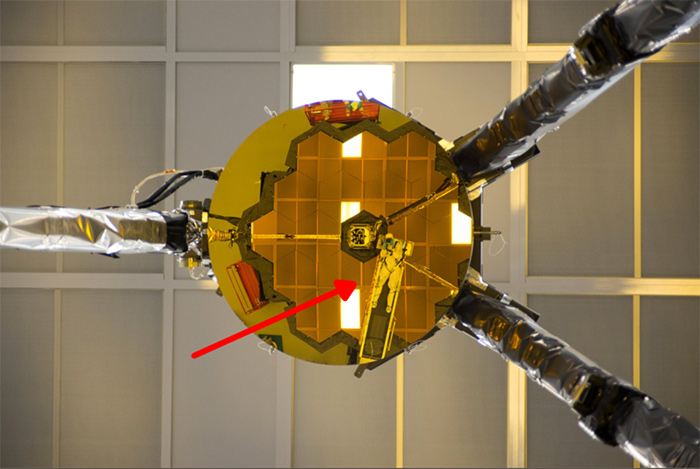
Durante las pruebas criogénicas del telescopio espacial Webb los ingenieros comprueban —en condiciones que simulan el espacio, donde se situará el telescopio— la alineación de las ópticas y que que los segmentos de espejo primario individuales se alinean correctamente entre sí...
Por Nacho Palou -
23 OCT 2017

En lo que sin duda es una gran noticia para SpaceX, que ve respaldada su modelo de negocio de reutilizar las primeras etapas de sus cohetes, Iridium ha anunciado que acepta llevar a cabo lanzamientos de satélites Iridium Next se hagan...

El depósito de combustible de un cohete Delta 2 convertido en 250 kg de basura espacial que cayó en 1997 en algún lugar del estado de Texas. Hace no mucho comentábamos por aquí que según Heiner Klinkrad, director de la Space Debris...
Por Nacho Palou -
20 OCT 2017

First hotfire of our BE-4 engine is a success #GradatimFerociter pic.twitter.com/xuotdzfDjF— Blue Origin (@blueorigin) 19 de octubre de 2017 Blue Origin, la empresa espacial de Jeff Bezos –sí, el Jeff Bezos de Amazon– ha dado un importantísimo paso adelante con el primer...

En la actualidad las cápsulas de carga Dragon de SpaceX son las únicas de la flotilla de vehículos que dan servicio a la Estación Espacial Internacional que son capaces de llevar carga de vuelta a Tierra, pues aunque en las Soyuz...

El Hubble está cayendo y si no hacemos algo pronto será demasiado tarde. De forma parecida a lo que sucede con la estación espacial china Tiangong-1, aunque no de manera tan inminente, el telescopio espacial Hubble también va camino de una “reentrada...
Por Nacho Palou -
19 OCT 2017

Lanzada el 12 de junio de 1967 la sonda soviética Venera 4 se convirtió el 18 de octubre de ese mismo año en la primera en transmitir datos a la Tierra desde otro planeta. Durante la entrada en la atmósfera de Venus...

[Recomiendo Mi agüita amarilla de Los toreros muertos como banda sonora mientras lees esta anotación.] Junto con la Starliner, su cápsula espacial tripulada, Boeing ha diseñado un traje espacial para que quienes viajen a bordo lo hagan protegidos frente a emergencias...
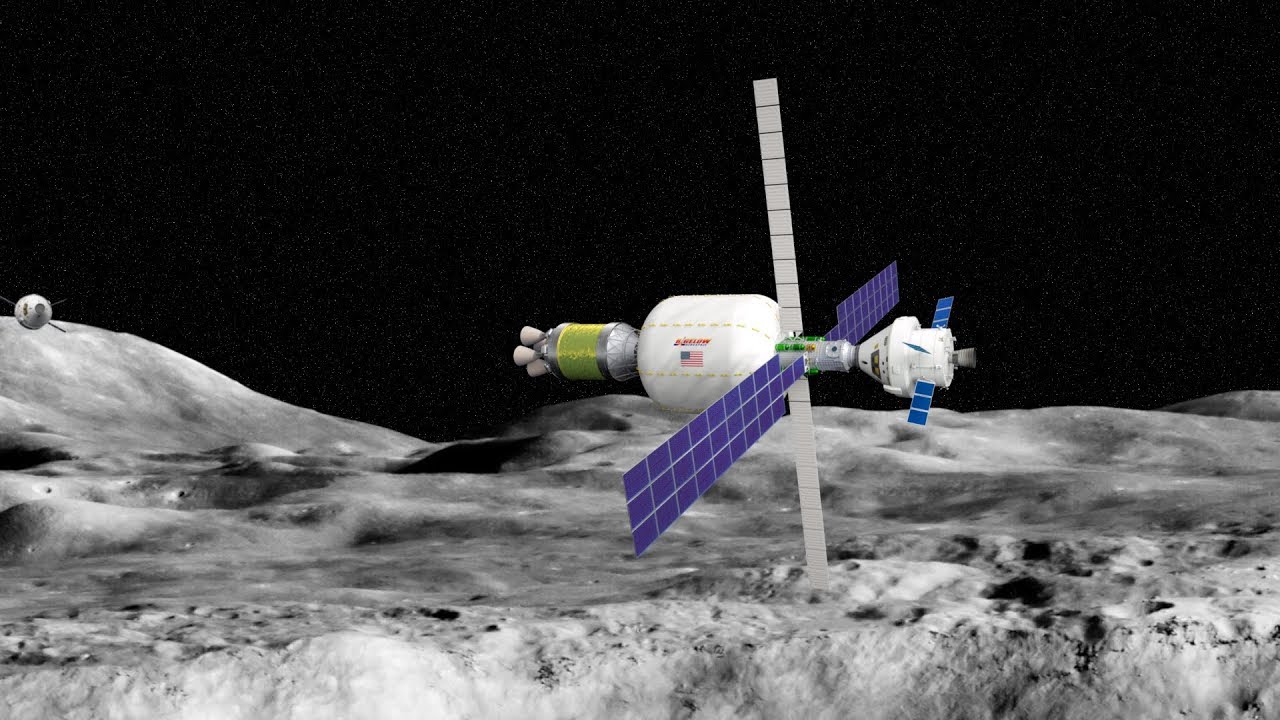
Ahora que la Luna parece estar poniéndose de nuevo de moda como próximo objetivo de las misiones también Bigelow Aerospace y United Launch Alliance se quieren apuntar y acaban de anunciar un acuerdo mediante el cual ULA pondrá primero en órbita...

La estación espacial Tiangong-1, que China puso en órbita en 2011 y que recibió a sus primeros tripulantes en 2012— lleva un año fuera de control y caerá a la Tierra “a finales de este año o principios de 2018.” El...
Por Nacho Palou -
17 OCT 2017
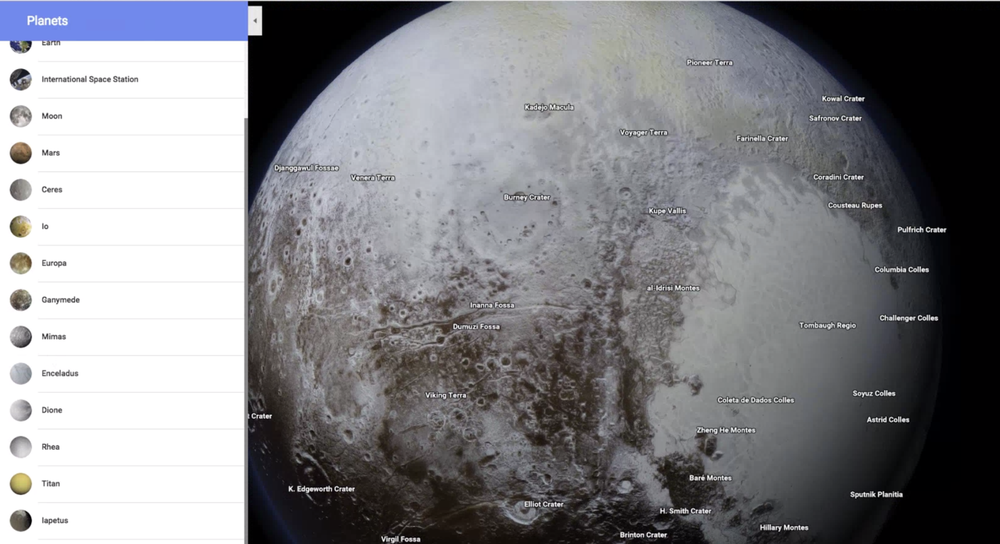
Mercurio, Venus, Ceres, Ío, Europa, Encélado, Titán, Plutón,... son algunos de los satélites y planetas que Google ha añadido a su mapas. Hasta ahora se podían visitar a través de Google Maps la Luna y Marte —además de la Estación Espacial...
Por Nacho Palou -
17 OCT 2017

Con 2.450 kilos de suministros a bordo la cápsula de carga Progress MS-07 atracaba en el módulo Pirs de la Estación Espacial Internacional a las 13:04, hora peninsular española, del 16 de octubre de 2017. Su carga está compuesta de comida,...

Algunas de las preguntas a las que respondió Elon Musk en Reddit estaban relacionada con el acceso a Internet desde Marte. A una distancia máxima de 22 minutos-luz “navegar por la web puede ser un poco desesperante”, ya que eso significa...
Por Nacho Palou -
16 OCT 2017

Las cosas del espacio van despacio, y los fidget spinner no son la excepción: aunque aquí en la Tierra ya han pasado de moda, sólo hace unos días que los astronautas de la estación espacial “recibiron el suyo” y lo hicieron...
Por Nacho Palou -
16 OCT 2017

Un misil intercontinental Rockot/Briz-KM reconvertido para tareas más pacíficas ha sido el encargado de poner en órbita el satélite medioambiental Sentinel 5P del programa Copérnico de la Unión Europea. Sentinel-5 Precursor tiene como objetivo medir la polución del aire, y lo...

Con la puesta en órbita del satélite de telecomunicaciones SES-11, que despegaba de la plataforma 39A del Centro Espacial Kennedy a las 00:53 del 12 de octubre de 2017, SpaceX conseguía hacer dos lanzamientos en menos de 60 horas tras haber...
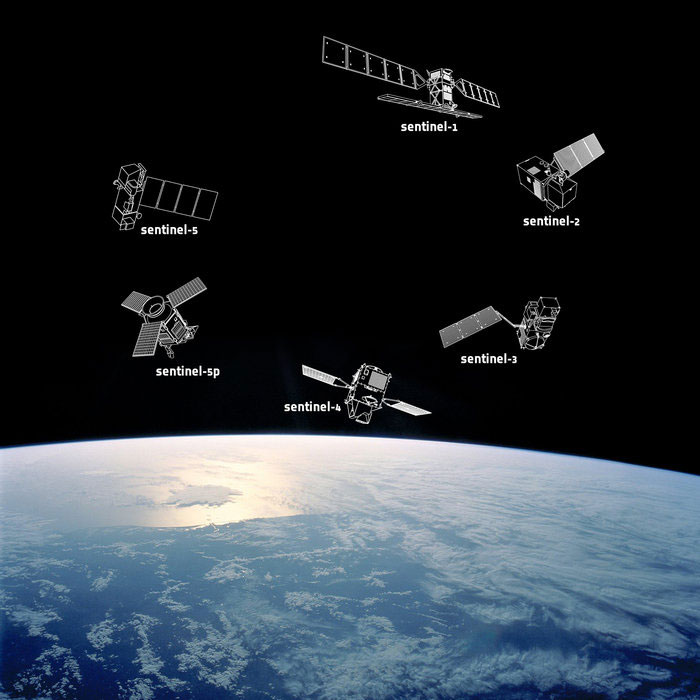
El programa Copérnico de la Unión Europea es un programa de observación de la Tierra que tiene como objetivo proporcionar información precisa, actualizada y de fácil acceso para mejorar la gestión del medio ambiente, comprender y mitigar los efectos del cambio...
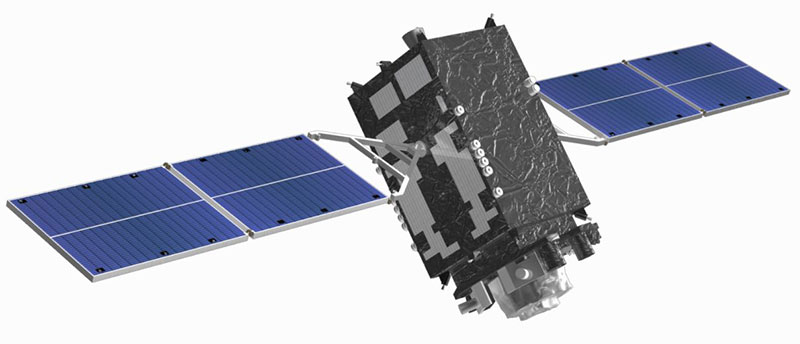
Utilizar el GPS en las grandes ciudades de Japón puede ser complicado porque la señal de los satélites del sistema no siempre cae lo suficientemente vertical como para alcanzar los espacios que hay entre edificios altos. Así que allá por 2002...

Iridium has acquired healthy signals from all 10 satellites.— SpaceX (@SpaceX) 9 de octubre de 2017 Otro éxito para SpaceX con el lanzamiento de la tercera tanda de diez satélites de comunicaciones Iridium Next. Queda otro lanzamiento similar en 2017 y otros...
“La mesa ha aterrizado.” La mesa Appolo 11 recrea la topología del terreno lunar a partir de imágenes digitales de la superficie de la Luna, con sus codilleras y montañas y cráteres de impacto provocados por el bombardeo constante de rocas y...
Por Nacho Palou -
9 OCT 2017

Creada bajo los auspicios de las Naciones Unidas, la World Space Week, o Semana Mundial del Espacio, es una celebración internacional de la contribución de la ciencia y la tecnología a la mejora de la condición humana. Se celebra todos los años...
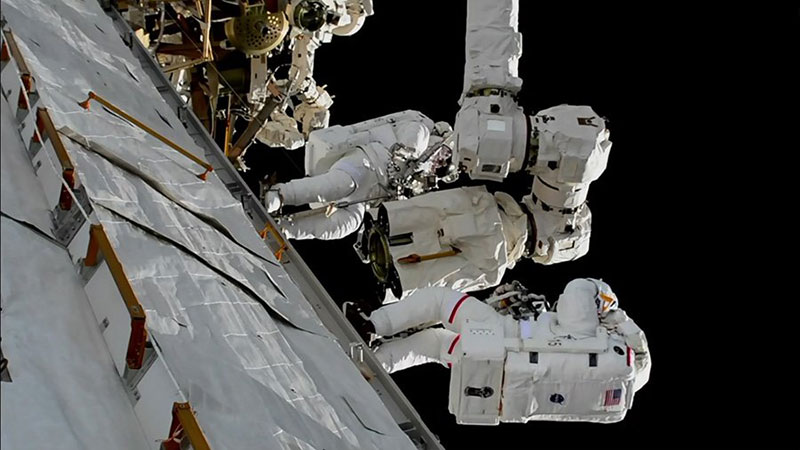
Con un peso de 1.800 kilos y una longitud de 17,6 metros cuando está completamente estirado el Canadarm 2, el brazo robot de la Estación Espacial Internacional, es uno de sus sistemas mas útiles. Sirve tanto para mover equipos y suministros...

SpaceX tiene programados dos despegues y sendos aterrizajes de cohetes Falcon para este fin de semana, los dos en un plazo de 48 horas: el primer lanzamiento será el 7 de septiembre (mañana) desde Cabo Cañaveral y el segundo será el domingo...
Por Nacho Palou -
6 OCT 2017
La Agencia Espacial Europea está haciendo las últimas comprobaciones de la Solar Orbiter, la sonda que tiene previsto enviar rumbo al Sol en octubre de 2018. El objetivo de la misión es estudiar cómo el Sol genera y «controla» la heliosfera,...
Con motivo del 60 aniversario del lanzamiento del primer satélite artificial, el ruso Sputnik, Motherboard se descuelga con este curioso recorrido hacia el inicio de las aspiraciones rusas por conquistar el espacio en How Dreams of Spacefaring Zombies Led to the Launch...
Por Nacho Palou -
5 OCT 2017

En 2015 los Emiratos Árabes Unidos (EAU) anunciaron su primera misión a Marte, la Emirates Mars Mission, con el envío de una sonda no tripulada llamada Hope (al-Amal, “esperanza” en árabe). La sonda tendrá como objetivo estudiar con detalle la atmósfera...
Por Nacho Palou -
3 OCT 2017

Allá por 2009 Rusia presentó un plan a sus socios de la Estación Espacial Internacional para añadir hasta cuatro módulos más a la EEI. La idea era que pudieran dotar de autonomía al segmento ruso si en algún momento los demás...

El pasado 29 de septiembre de 2017 a las 23:56, hora peninsular española, un cohete Ariane 5ECA despegaba del espaciopuerto espacial de Kourou con los satélites de comunicaciones Intelsat 37e y BSat-4a a bordo. Fue un lanzamiento por el libro, que...

La semana pasada, en el marco del International Astronautical Congress, Elon Musk daba más detalles acerca del BFR, el Big Fucking Rocket, el cohete que Elon Musk pretende utilizar para prácticamente todo. Pero Raúl Torres, que lleva años trabajando en el...

En plena resurrección de la carrera espacial —o de otra carrera espacial—, en la que los cohetes aterrizan en vertical y se habla con entusiasmo y hasta con cierta candidez sobre llegar a Marte, tal vez lo de lanzar globos estratosféricos...
Por Nacho Palou -
2 OCT 2017

Fotografiado el 18 de septiembre de 2017 por Paolo Nespoli en A peaceful and breathless Moonrise from the Space Station se puede ver la Luna elevándose sobre el horizonte de la Tierra junto con Mercurio, Marte, Venus, y la estrella Regulus....
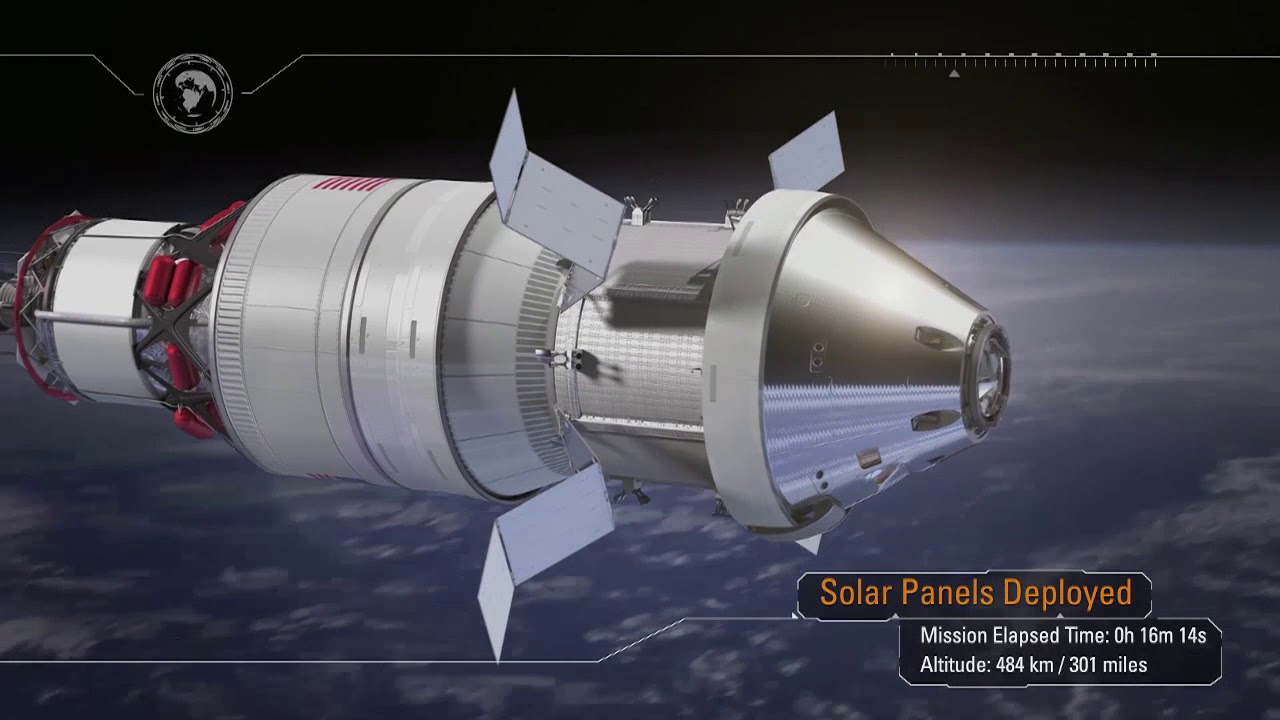
La NASA acaba de publicar el vídeo Exploration Mission-1 – Pushing Farther Into Deep Space, en el que se resumeen ocho minutos la primera misión de la combinación formada por el cohete Space Launch System y la cápsula tripulada Orión. Con...
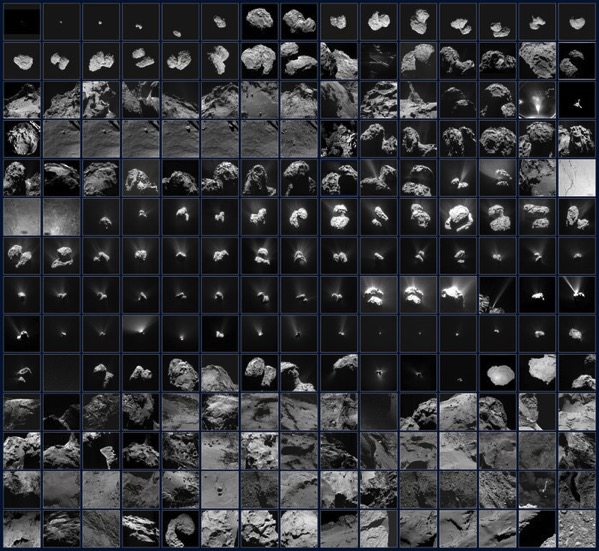
Hoy hace un año que decíamos adiós a Rosetta, una de las misiones espaciales más espectaculares y con más éxito de los últimos años, algo que la Agencia Espacial Europea ha querido conmemorar con un mosaico de 210 imágenes, también disponibles...
Hubble Focus: Our Amazing Solar System es un nuevo libro publicado por el equipo del telescopio espacial Hubble. Incluye una impresionante colección de imágenes de alta resolución y videos interactivos obtenidos por el telescopio espacial y otras sondas, con capítulos que cubren...
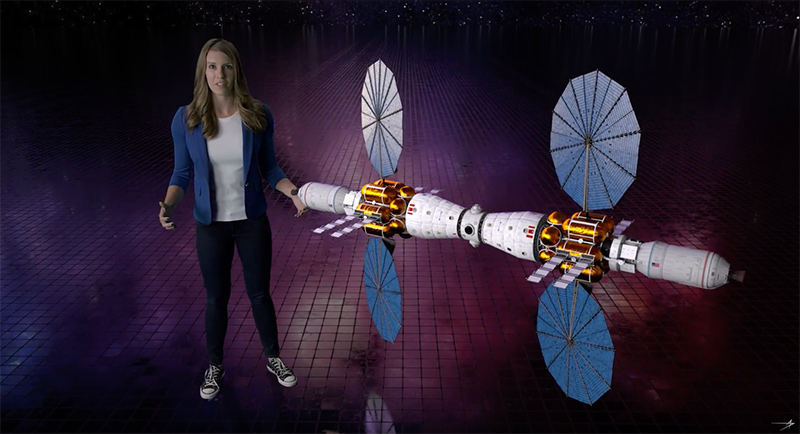
Estamos ante el amanecer de una nueva era del descubrimiento sobre nosotros mismos y sobre nuestro sistema solar, y sobre el lugar que ocupamos en él. —Rob Chambers, Lockheed Martin Lockheed-Martin también quiere su trozo de pastel marciano y durante el International...
Por Nacho Palou -
29 SEP 2017

A lo largo de sus más de trece años en órbita alrededor de Saturno la misión Cassini/Huygens nos ha dejado incontables imágenes. Pero ésta sin duda va a ser una imagen icónica de la misión, pues es la última panorámica que...
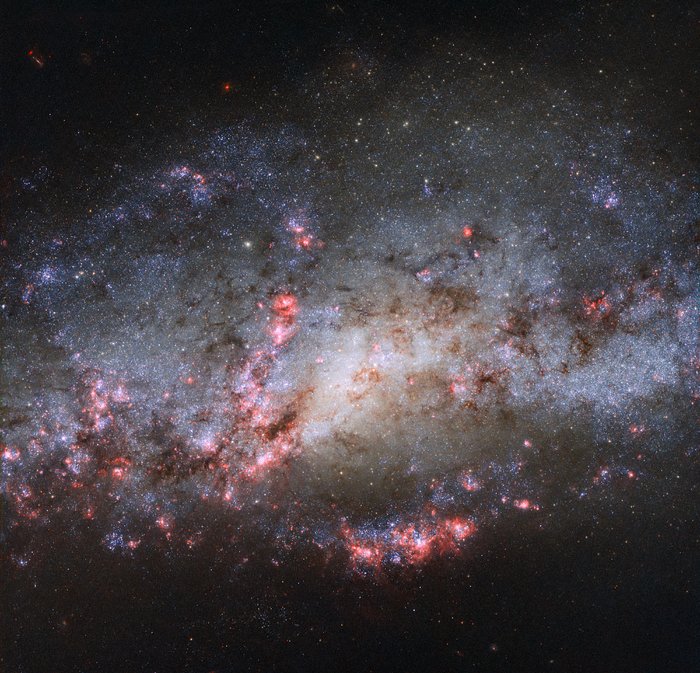
El vídeo de la ESA hace un recorrido por una imagen panorámica (esta imagen, obtenida con el telescopio espacial Hubble de la NASA) de la galaxia NGC 4490. Se trata de una antigua galaxia en espiral que quedó desaparramada y dispersa...
Por Nacho Palou -
28 SEP 2017

La sonda New Horizons está en estos momentos realizando una campaña de observación de objetos del cinturón de Kuiper, o KBOs, campaña que durará hasta el 22 de diciembre de 2017, momento en el que volverá a entrar en hibernación hasta...
What is red, is a planet and is the focus of my orbit? pic.twitter.com/HDRWjOcPus— ISRO's Mars Orbiter (@MarsOrbiter) 24 de septiembre de 2014 El 24 de septiembre de 2017 se cumplían tres años de la entrada en órbita alrededor de Marte de...
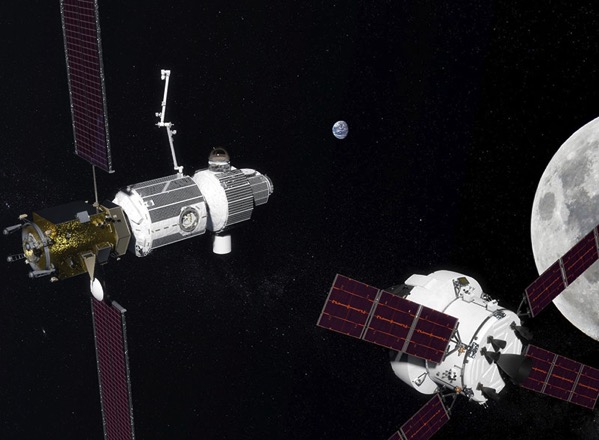
Durante mucho tiempo el nuevo gran cohete de la NASA, el Space Launch System, era una solución en búsqueda de un problema, un enorme y potente cohete con el que no sabían muy bien qué hacer. Aunque es posible que la...

Tras 155 días en el espacio el carguero espacial chino Tianzhou 1 terminaba su misión con una reentrada controlada en la atmósfera sobre el Pacífico el 23 de septiembre de 2017. Con un peso al lanzamiento de 13.000 kilos, de los...
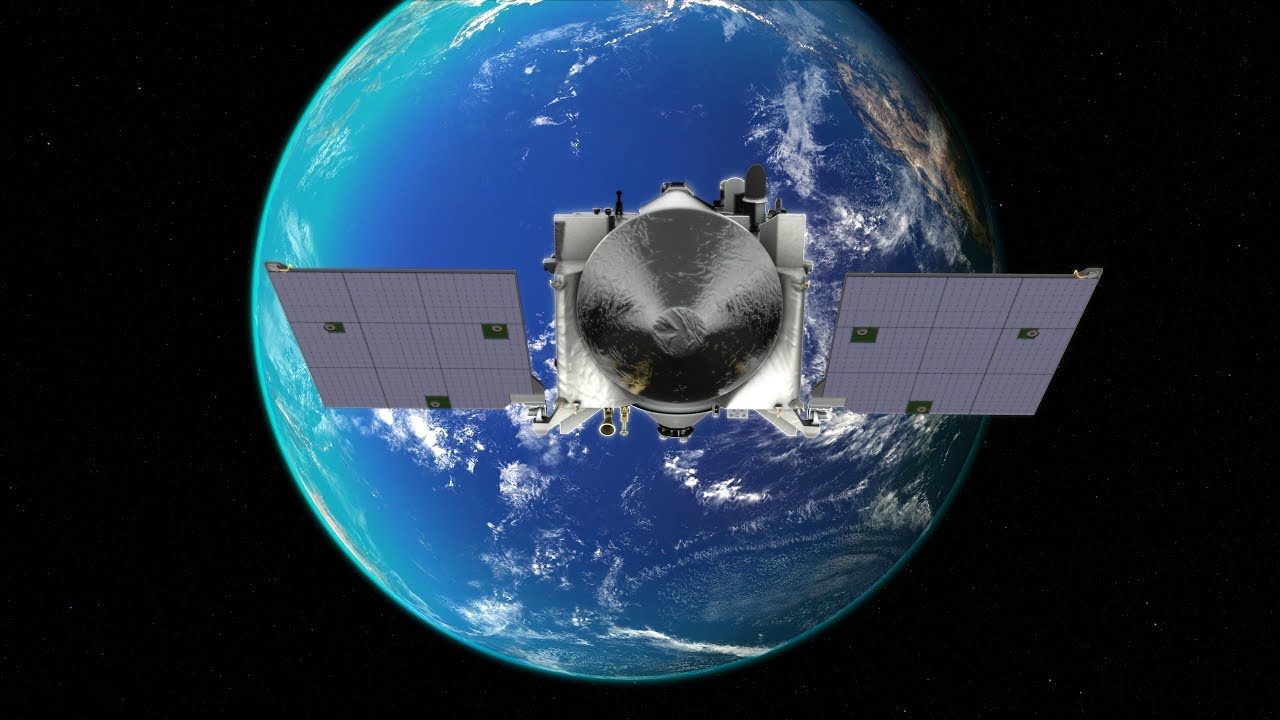
Lanzada el 8 de septiembre de 2016 la sonda Osiris-REx de la NASA tiene como objetivo tomar muestras del asteroide Bennu y traerlas de vuelta a la Tierra para 2023. Pero para poder alcanzar a Bennu sin tener que sacrificar peso...

Situado en Langley Research Center, el Centro de Investigación Computacional Katherine G. Johnson, con una inversión de 23 millones de dólares, es un edificio de algo más de 11.000 metros cuadrados –equivalente a un campo de fútbol, aunque depende de cómo...
Este vídeo acerca de Adeline, la propuesta de Airbus para cohetes reutilizables, ya tiene un par de años, pero es la primera referencia que encuentro sobre ese concepto. Adeline, de ADvanced Expendable Launcher with INnovative engine Economy, o Cohete Desechable Avanzado...

Hace una semana que le dijimos adiós a Cassini, una de las misiones espaciales más exitosas de las últimas décadas, aunque sin duda seguiremos oyendo hablar de ella según los científicos sigan trabajando con los aproximadamente 635 GB de datos que...

La Antártida es el desierto más grande del planeta: prácticamente no llueve nunca, está despoblado y apenas alberga vida vegetal o animal. La ausencia de vida vegetal o animal significa que a los científicos que pasan largas temporadas allí hay que...
Por Nacho Palou -
22 SEP 2017

En los últimos días se está hablando de Link Space, una empresa china que pretende desarrollar un cohete para lanzamientos orbitales con una primera etapa reutilizable, al estilo de SpaceX, aunque con unas capacidades y dimensiones menos ambiciosas. El New Line...

Un asteroide híbrido llamado 288P es el primer y por ahora único caso conocido que combina dos tipos de asteroides poco comunes: asteroides binarios (en el cual dos asteroides orbitan el uno con el otro) y asteroides con actividad y características...
Por Nacho Palou -
21 SEP 2017

Concebido para lanzar cohetes el Scaled Composites Model 351, más conocido como Roc o Stratolaunch, el nombre de la empresa para el que se está fabricando, es un avión de doble fuselaje y seis motores, que con sus 117 metros de...
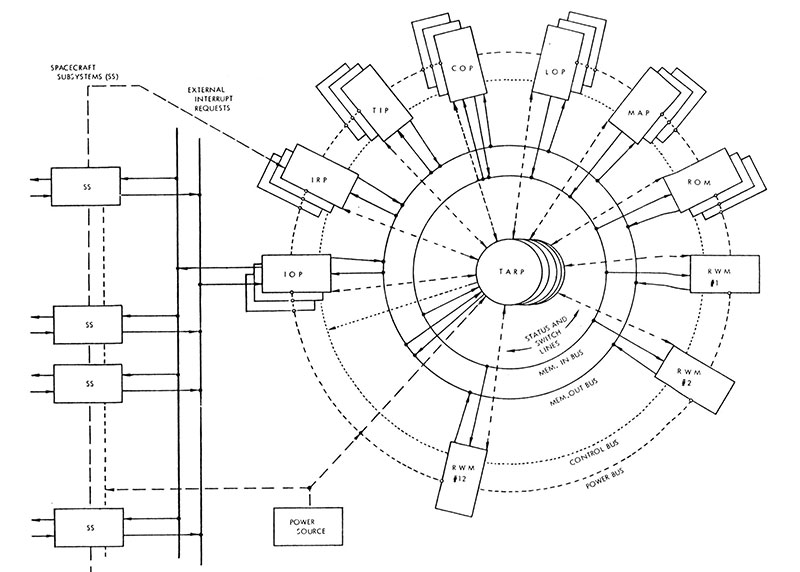
Buscando algo sobre los sistemas autorreparables de las sondas Voyager me encontré con From Sequencers to Computers de la NASA, que es el capítulo 5 del no menos interesante documento Computers in Spaceflight: The NASA Experience que hay en su web....

КЛЮЧ НА СТАРТ! Запуск пилотируемого корабля #СоюзМС06 в 00:17 мск. Прямая трансляция - https://t.co/ip4MnegEqX. pic.twitter.com/wPzCdIKVLY— РОСКОСМОС (@roscosmos) 12 de septiembre de 2017 Los cohetes Soyuz tienen su origen en el misil balístico intercontinental R-7A Semyorka y una cosa que han heredado de...

Tomada el 18 de septiembre de 1977, Crescent Earth and Moon, la primera imagen tomada por una nave espacial que muestra la Tierra y la Luna en un solo cuadro, cumple 40 años hoy. Fue tomada por la Voyager 1 desde...
Tianzhou-1 completed its 3rd & final orbital refuelling test at 12:17 UTC today, transferring 250 kg of propellant to Tiangong-2 space lab pic.twitter.com/TnCK68ZDUC— Andrew Jones (@AJ_FI) 16 de septiembre de 2017 Lanzado el 20 de abril de 2017, el Tianzhou 1 es...

.@Astro_Paolo and @AstroKomrade released @SpaceX #Dragon with Canadarm2 at 4:40am ET today for return to Earth. https://t.co/5rHQlLLgWo pic.twitter.com/PhQkutEWdN— Intl. Space Station (@Space_Station) 17 de septiembre de 2017 Un amerizaje a las 16:15 del 17 de septiembre de 2017, hora peninsular española, a...
Acabamos de decir adiós a la sonda Cassini. Pero apenas cuatro día antes la sonda New Horizons salía de cinco meses de hibernación para iniciar una campaña de observación en el cinturón de Kuiper que durará hasta diciembre. Durante esta campaña...
Ya está. Después de 13 años y 75 días en órbita, veinte años menos un mes exactos desde su lanzamiento, y 35 años desde que naciera el grupo de trabajo conjunto de la Agencia Espacial Europea y la NASA que definió...

Según se puede leer en First Ariane 6 contract: Arianespace to orbit four Galileo satellites on two Ariane 62 launches los dos primeros lanzamientos del nuevo cohete de la Agencia Espacial Europea serán para poner el órbita cuatro satélites del sistema de...

La gente de SpaceX nos tiene muy mal acostumbrados últimamente con lo fácil que hacen parecer eso de recuperar las primeras etapas de los cohetes que lanzan… pero como siempre digo la cosa dista de ser sencilla. Y How Not to...
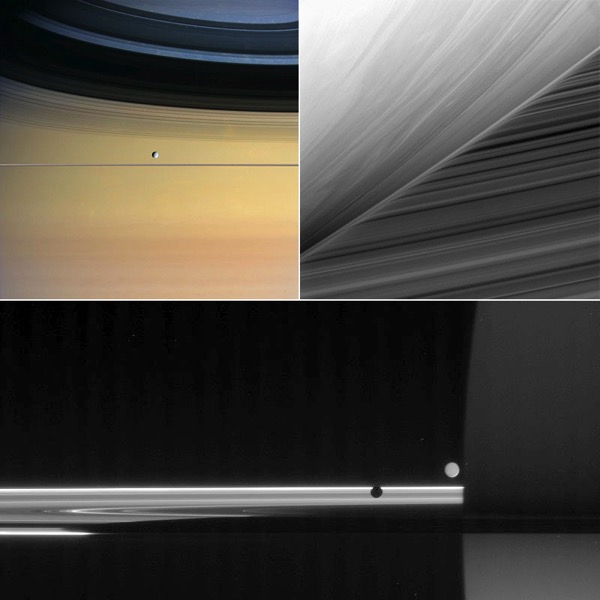
El principal legado de la misión Cassini/Huygens son los 653 GB de datos que ha transmitido a la Tierra durante los trece años de su misión. De ellos han salido ya 3.948 artículos científicos, aunque con toda seguridad en los próximos años...

Después de un lanzamiento de libro y de seis horas de vuelo la cápsula tripulada Soyuz MS-06 atracaba en modo automático en el módulo Poisk del segmento ruso de la Estación Espacial Internacional. Tras las comprobaciones pertinentes respecto a la firmeza...

Aunque por lo general se piensa en Cassini/Huygens como una misión a Saturno en realidad las lunas del planeta también formaban una parte muy importante de la misión, como deja bien claro la existencia de Huygens, el aterrizador que dejamos en...

El 25 de diciembre de 2004, tras viajar hasta Saturno a lomos de la sonda Cassini, la sonda Huygens se separaba de ella para emprender la última parte de su viaje de siete años rumbo a Titán. Y así, después de...

La cápsula tripulada Soyuz MS-06 y su cohete lanzador están ya listos en la plataforma de Gagarin del centro espacial de Baikonur para su lanzamiento rumbo a la Estación Espacial Internacional. El lanzamiento está previsto para las 23:17 del 12 de...
El 11 de septiembre de 2017 el telescopio espacial Hubble completaba su órbita 150.000 desde su lanzamiento el 25 de abril de 1990 y el próximo 27 de septiembre de 2017 cumplirá su día número 10.000 en órbita. Aproximadamente un 60%...
Una pasada a 119.049 kilómetros de la superficie de Titán a las 21:04 del 11 de septiembre de 2017, hora peninsular española, ha modificado la trayectoria de la sonda Cassini lo suficiente como para que en su última órbita, que empieza...
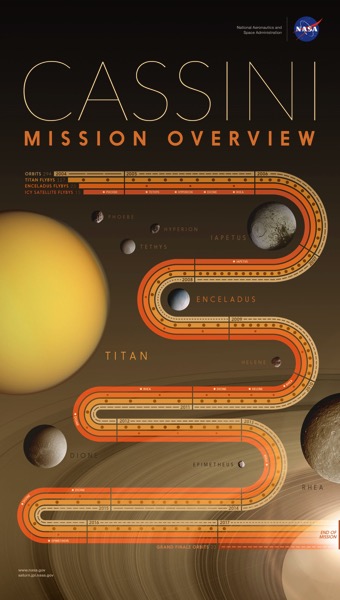
Cassini Mission Overview es un resumen de la misión de la sonda Cassini que te puedes descargar para imprimir como póster que incluye los datos fundamentales de ésta, a la que le queda menos de una semana. En él se pueden...
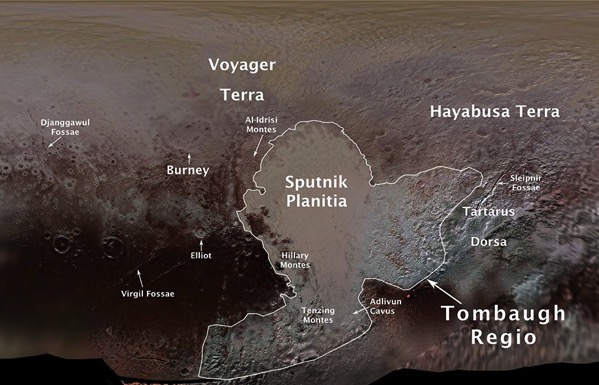
La Unión Astronómica Internacional acaba de anunciar que ha aprobado nombres oficiales para catorce de las características de la superficie del ex planeta que nos reveló la sonda New Horizons cuando pasó por allí en 2015. Según se puede leer en...

La quinta misión del avión espacial no tripulado Boeing X-37B comenzaba con su lanzamiento a las 16:00 del 7 de septiembre de 2017, hora peninsular española. Como es habitual se trata de una misión con objetivos «clasificados», aunque oficialmente el X-37B...
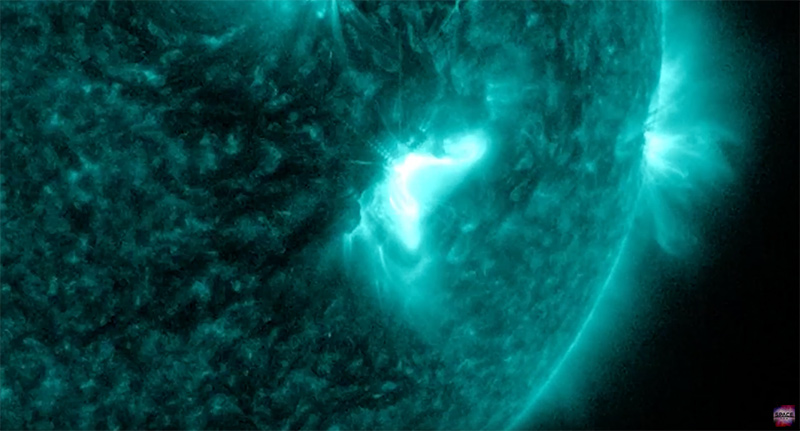
Con una música apropiadamente inquietante Space.com recopila algunas de las imágenes en vídeo capturadas por el Solar Dynamics Observatory de la NASA de las llamaradas solares de “categoría” X2 y X9 registradas ayer. La nube de plasma gorda puede tardar en...
Por Nacho Palou -
7 SEP 2017
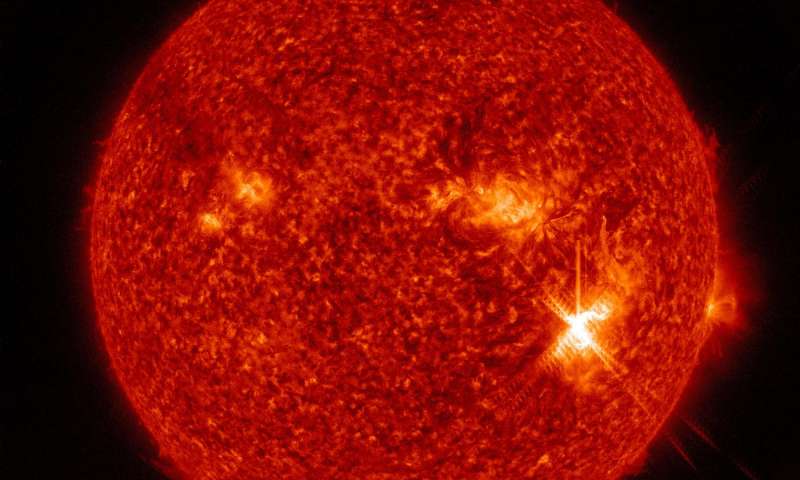
Esta mañana hacia las 11.30 hora peninsular (09.30 GMT) se han detectado dos llamaradas solares significativas. Una de ellas la han clasificado X2,2 y la otra, que alcanzó máximos tres horas después, como X9,3. La llamarada X9,3 es la más potente...
Con el lanzamiento de la Voyager 1 el 5 de septiembre de 1977 la NASA terminaba de poner en marcha la misión más duradera hasta la fecha de toda la era espacial y la que más lejos ha llegado. Este vídeo...
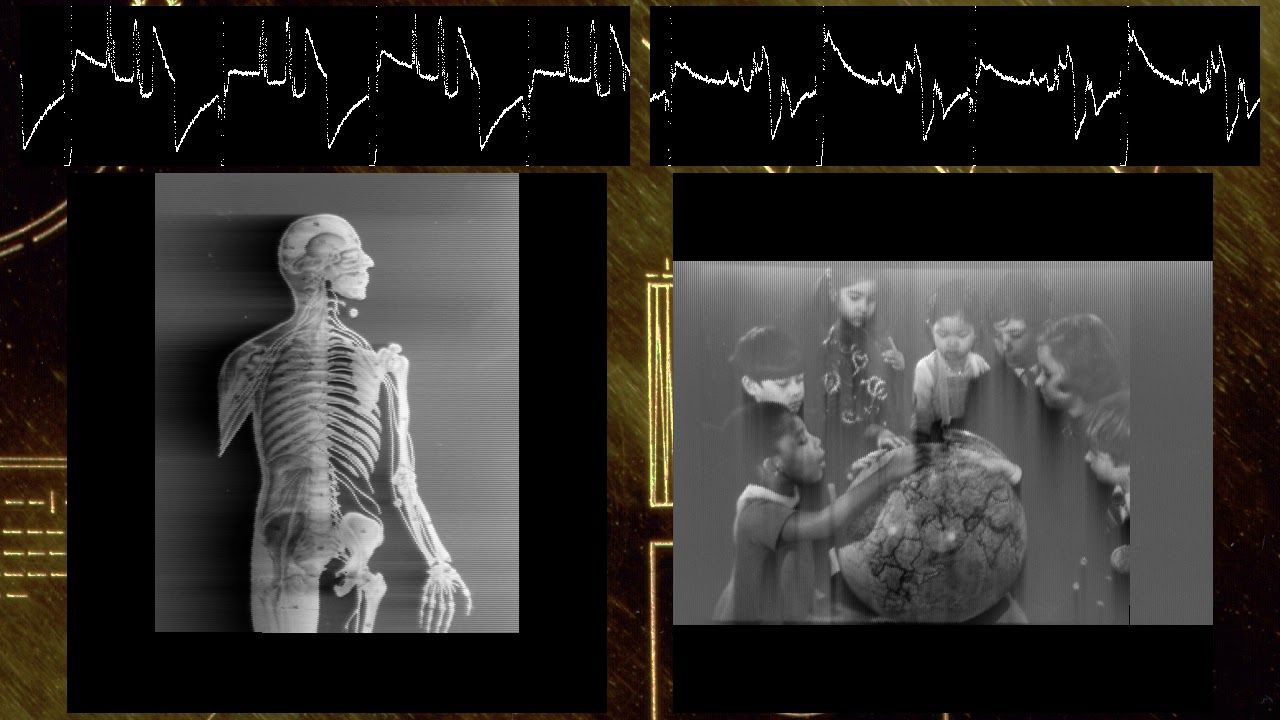
El video de arriba es la decodificación en tiempo real de más de un centenar de imágenes que van codificadas en los canales de audio de los discos que llevan abordo cada una de las dos sondas Voyager. ¿Cómo se guardan...
Por Nacho Palou -
5 SEP 2017

La sonda Voyager 1 se lanzó hace hoy 40 años, el 5 de septiembre de 1977. Unas semanas antes se había lanzado la Voyager 2, el 20 de agosto de ese mismo año. Desde entonces ambas sondas han alcanzado el espacio...
Por Nacho Palou -
5 SEP 2017

Fyodor Yurchikhin, Jack Fischer y Peggy Whitson volvían a tierra a las 3:21 de la noche del 3 de septiembre de 2017, hora peninsular española, con el aterrizaje de la Soyuz MS-04 en la estepa de Kazajistán. Han sido 136 días...

Un helicóptero 234-UT, la versión civil del Chinook, se llevó a la unidad de desarrollo de la nave espacial Dream Chaser a hacer un vuelo cautivo de una hora y cuarenta minutos en el que se comprobó el funcionamiento de sus...
El programa Copérnico de la Agencia Espacial Europea y la Unión Europea es una red de vigilancia medioambiental que tiene como objetivo mantener bajo observación la superficie de la Tierra, sus océanos, y su atmósfera para poder contribuir con datos a...
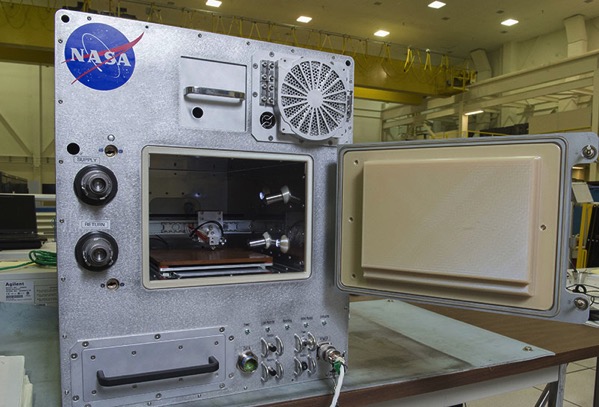
Ya hace algún tiempo que en la Estación Espacial Internacional se está experimentando con impresoras 3D, ya que uno de los problemas de una misión espacial larga y lejos de la Tierra es que puedes necesitar una pieza que no tengas...

La Dream Chaser Cargo System, la versión de carga de la nave Dream Chaser de Sierra Nevada Corporation, ha dado otro paso adelante en su camino para incorporarse a la flotilla de naves que llevan suministros a la Estación Espacial Internacional...

Neil Armstrong y «Buzz» Aldrin, los nombres de los tripulantes del Apolo 11 que dieron los primeros pasos de la humanidad en otro astro, son razonablemente conocidos. Pero los de misiones posteriores, o incluso el del piloto del módulo de comando...

A Cassini-Huygens, la misión conjunta de la Agencia Espacial Europea y la NASA a Saturno le quedan poco más de dos semanas de vida, pues está previsto que termine el 15 de septiembre de 2017 a las 12:44 hora peninsular española....
Antares es una estrella grande: su radio es 883 veces mayor que el radio del Sol. Dicho de otro modo, colocada en el lugar del Sol Antares llegaría hasta Júpiter. Pero también sucede que está lejos, a unos 550 años luz...
Por Nacho Palou -
26 AGO 2017

La Orrery Lamp de Bobby Genalo es una lámpara de intensidad ajustable que representa el Sol, con el sistema formado por la Tierra y la Luna girando a su alrededor. Se trata de un proyecto en Kickstarter, donde en pocos días...
Por Nacho Palou -
25 AGO 2017

Otro lanzamiento con éxito para SpaceX, en este caso el del FormoSat-5, un satélite de observación terrestre de la Organización Espacial Nacional de Taiwan, desde el Complejo de Lanzamiento 4E de Vandenberg, en California. Fue el lanzamiento número 40 de un...
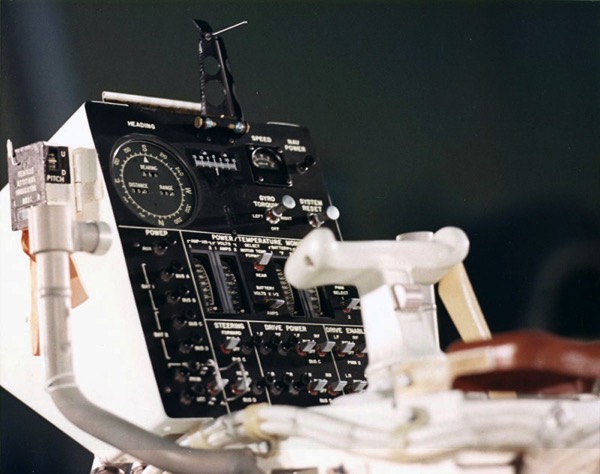
Hace poco me sorprendió ver lo que al principio tomé por una brújula en una foto del panel de control de los Lunar Roving Vehicle que usaron los astronautas de la NASA a partir de la misión Apolo 15 porque la...

Los astronautas Samantha Cristoforetti y Matthias Maurer de la Agencia Espacial Europea acaban de participar en nueve días de entrenamiento de supervivencia en el mar junto con 16 astronautas chinos. Es la primera vez que astronautas de otra nacionalidad se entrenan...
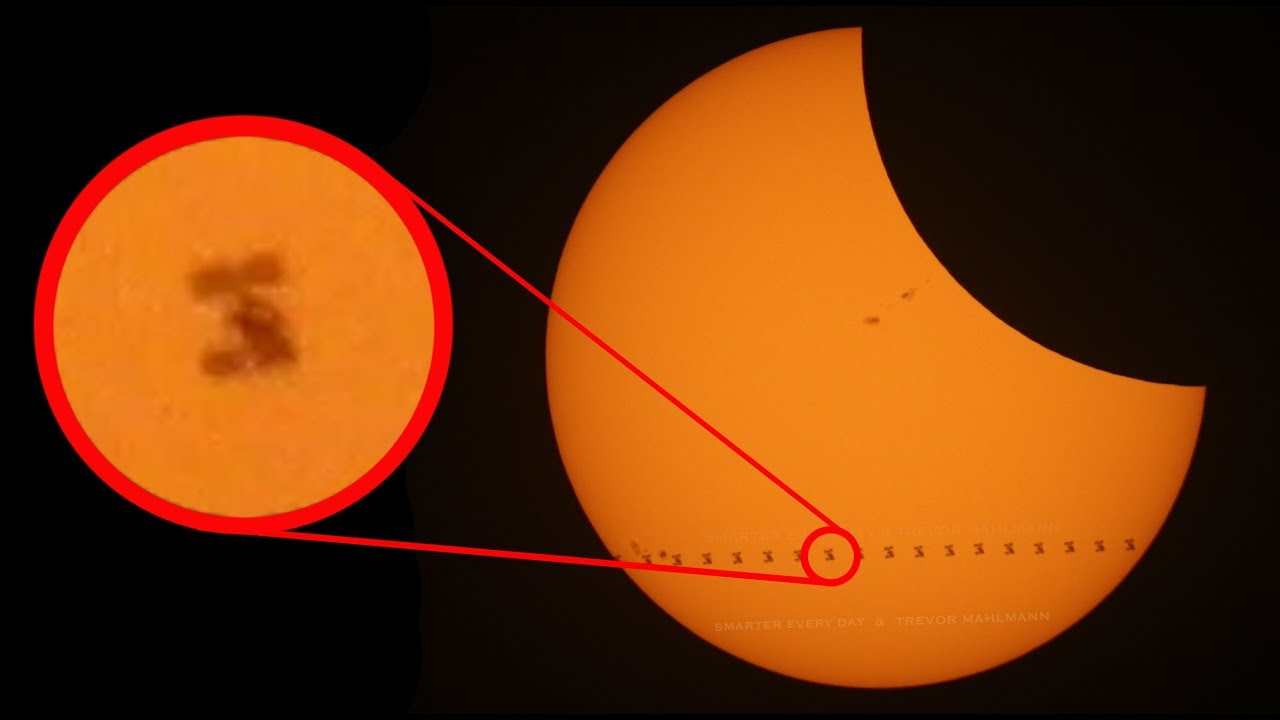
Destin de Smarter Every Day se fue a Wyoming a ver el gran eclipse americano con unos amigos y un buen equipo fotográfico. Intentaban captar desde el mejor lugar el momento en que la Estación Espacial Internacional cruzaba casualmente por delante...

Elon Musk, que de crear expectativas sabe un rato, ha revelado la apariencia que tiene el traje espacial que llevarán los tripulantes de la Dragon v2 cuando vuelen en ella. No se trata de un diseño conceptual sino de un traje...
Hemos publicado muchos vídeos en los que se ve la Tierra desde el espacio pero creo que Clouds de Seán Doran es el primero en el que las protagonistas son las nubes. Está hecho con imágenes del archivo del satélite meteorológico...

A Loren Grush le dejaron probarse un par de prototipos de trajes espaciales para Marte y la Luna y descubrió no sólo que ponérselos es un trabajo que requiere ayuda sino que es muy cansado usarlos, entre otras cosas porque tienes...
El próximo 8 de septiembre se cumplen 50 años de la inauguración del Centro Europeo de Operaciones Espaciales, que es desde donde se controlan las misiones espaciales de la Agencia Espacial Europea. En este tiempo 77 naves han sido controladas total...

Por mucho que le pese a Elon Musk la inmensa mayoría de la humanidad jamás podrá ver Marte en primera persona, pero Visions of Mars, un vídeo creado por Kevin Gill se aproxima mucho a lo que podríamos ver de estar...
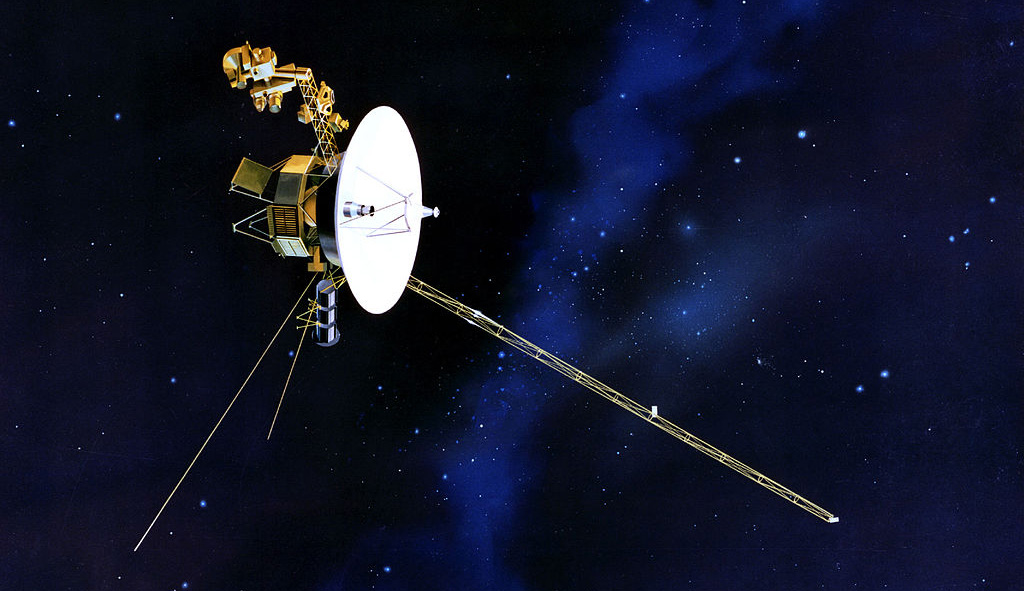
Impresión artística de la Voyager 1 El 20 de agosto de 1977 la NASA lanzaba la sonda Voyager 2 con destino Júpiter y Saturno, aunque en una trayectoria que luego le permitiría continuar su misión visitando Urano y Neptuno o Plutón. Dieciséis...
Fyodor Yurchikhin y Sergey Ryazansky llevaron a cabo el paseo espacial número 202 desde la Estación Espacial Internacional el 17 de agosto de 2017. Durante él se dedicaron fundamentalmente a recoger muestras de experimentos, colocar otras nuevas, hacer fotos y tomar...

Los operadores del brazo robot de la Estación Espacial Internacional acoplaron la cápsula de carga Dragon SpX-12 al módulo Harmony de ésta a las 15:07 del 16 de agosto de 2017, hora peninsular de España, marcando el final de una primera...
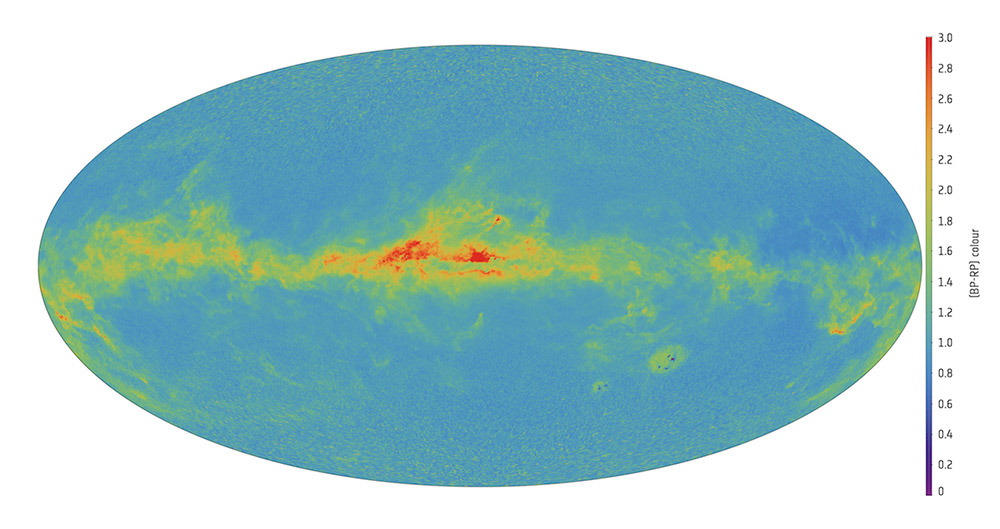
Mapa preliminar del cieloImagen: ESA/Gaia/DPAC/CU5/CU8/DPCIF. De Angeli, D.W. Evans, M. Riello, M. Fouesneau, R. Andrae, C.A.L. Bailer-Jones Estos días se ha dado a conocer un adelanto con la publicación de la versión preliminar del mapa del cielo con millones de estrellas que...
Hay más bien pocas probabilidades de que nadie vaya a volar nunca más en un transbordador espacial de la NASA –al menos de los del siglo XX– pero me ha encantado How to Land the Space Shuttle… from Space. En él...

La Mission Operation Control Room 2 del Centro de Control de Misiones Christopher C. Kraft Jr. es donde se recibió el mensaje de Neil Armstrong en el que decía que el Águila había aterrizado o el «OK, Houston, hemos tenido un...

Otro lanzamiento de libro de una cápsula de carga Dragon, en este caso la Dragon SpX-12, que va rumbo a la Estación Espacial Internacional con 2.910 kilos de sumininistros y material para experimentos, que de hecho forma el 75 por ciento...
El 14 de julio de 2017 un Soyuz 2-1A establecía un nuevo récord para este modelo de cohete al poner en órbita 73 satélites con un solo lanzamiento. Uno de los satélites que iba a bordo era Mayak, un CubeSat de...

El 25 de mayo de 2017 la empresa Rocket Lab lanzaba su primer cohete Electron, bautizado como It's a Test. Ese lanzamiento, además de ser el primero de este tipo de cohete, incluía varios primeros: era el primer lanzamiento de un...

SpaceX tiene todo listo en la plataforma de lanzamiento 39A del Centro Espacial Kennedy para el lanzamiento de la cápsula de carga Dragon SpX-12 rumbo a la Estación Espacial Internacional. Un Falcon 9 1.2 será el encargado de ponerla en órbita, con...

Mars 2030 es un juego en primera persona en el que te pones en las botas –o mejor en el traje espacial completo– de un astronauta que tiene varias misiones que cumplir en el área de 40 kilómetros cuadrados de Marte...

Recientemente Curiosity ha cumplido cinco años en Marte y este time-lapse condensa en poco más de cinco minutos los 18 kilómetros que ha recorrido en este tiempo. El time-lapse está formado por las imágenes captadas por la Hazcam (a la izquierda...
Por Nacho Palou -
10 AGO 2017

Los técnicos de Northrop Grumman han dado otro paso más de cara al lanzamiento del JWST con el ensamblado final de su parasol, tal y como se puede leer en Sunshield Layers Fully Integrated on NASA’s James Webb Space Telescope. Las...

El cráter de impacto Occator es donde hay una mayor concentración de las zonas brillantes observados por la sonda Dawn en el planeta enano Ceres, en 2015. Con un diámetro de 92 kilómetros y 4 kilómetros de profundidad este cráter muestra...
Por Nacho Palou -
6 AGO 2017

Riding dirty... getting wiser. See the top discoveries in the time it took to get so dusty. Five years on Mars: https://t.co/Ift2BPekDg pic.twitter.com/XXKbOsCFpH— Curiosity Rover (@MarsCuriosity) 4 de agosto de 2017 En sus cinco años en Marte desde que aterrizara allí el...

Pulsing thrusters, cryogenic snow, docking port contact! Beautiful backdrop as we docked w/ @Space_Station last week. #TBT #SpaceVideosRock pic.twitter.com/60QMSSc7YD— Randy Bresnik (@AstroKomrade) 4 de agosto de 2017 Este vídeo de los últimos momentos de la llegada de la Soyuz MS-05 a la...
Los interiores de las naves espaciales son también arquitectura, [ya que] la arquitectura es la organización de espacio y proyectar interiores es el objetivo de la arquitectura. Así que nunca he sentido que dejara mi carrera– Galina Balashova Nacida en 1931,...
Aprovechando que la posición relativa de la Tierra, algunas estrellas y el objeto del cinturón de Kuiper conocido como 2014 MU69 lo permitía entre junio y julio de 2017 se llevó a cabo una campaña de observaciones para obtener información acerca...
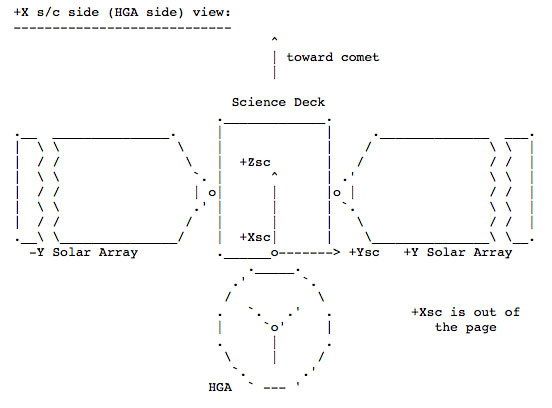
La División de Ciencia Planetaria de la NASA tiene un sistema conocido como Spice* que sirve para planear e interpretar observaciones hechas con los instrumentos a bordo de las sondas que andan por ahí repartidas. Ofrece interfaces para distintos lenguajes de...
La Osa Mayor, sobre la que el Museo Americano de Historia Natural tiene este didáctico vídeo, es una de las constelaciones celestes más reconocibles en el hemisferio norte. Por un lado es una de las más brillantes; por otra sus dos...
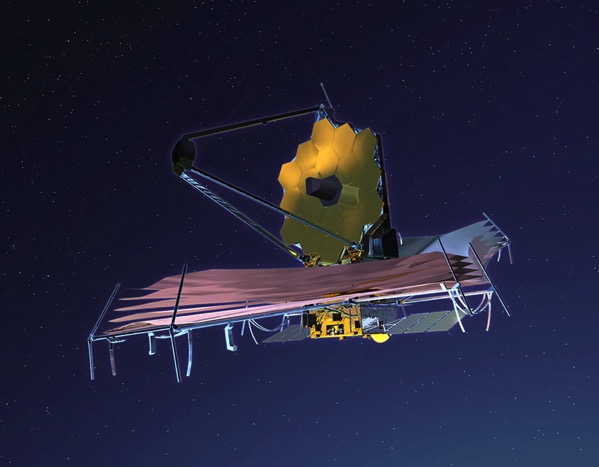
Mientras el sistema óptico del Telescopio Espacial James Webb está siendo sometido a las pertinentes pruebas de frío la electrónica del telescopio ha superado por su parte una importante prueba. Según se puede leer en NASA Tests the Webb Telescope’s Communication...
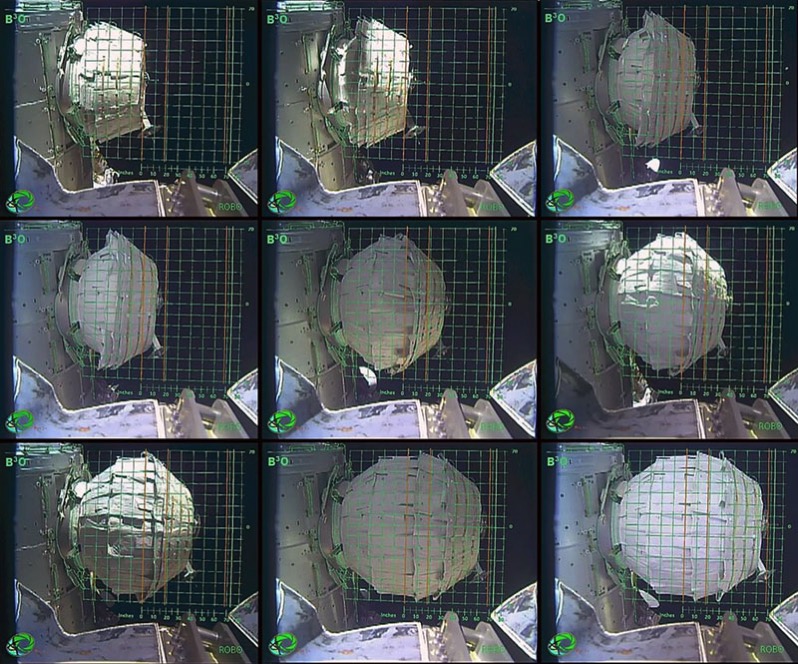
Expansión de BEAM Después de algo más de un año desde que lo hincharan el Bigelow Expandable Activity Module o Módulo de Actividad Expandible Bigelow, BEAM para los amigos, no ha sufrido ni una sola pérdida de aire. Y eso que creen...

Tal y como hacía temer el fallo del segundo Larga Marcha 5, China se ha visto obligada a posponer el lanzamiento de la misión Chang'e 5, que tiene como objetivo traer hasta 2 kilos de muestras del suelo de la Luna,...

XCOR, la empresa que desarrollaba el avión suborbital biplaza Lynx –del que veo con sorpresa que no habíamos hablado nunca– se ha quedado sin dinero, con lo que ha tenido que despedir a todos sus empleados. Sólo quedan «a bordo» los...

Tras el atraque con éxito de la cápsula tripulada Soyuz MS-05 en la que viajaba el astronauta de la Agencia Espacial Europea Paolo Nespoli se encuentra desde primeras horas del 28 de julio de 2017 a bordo de la Estación Espacial Internacional,...

Con años de retraso sobre lo previsto –tenía que haber sido en 2013– Irán llevaba a cabo el primer lanzamiento orbital de su cohete Simorgh el 27 de julio de 2017, lanzamiento que marcó también el estreno del Centro Espacial Imán...

Falcon Heavy maiden launch this November Una publicación compartida de Elon Musk (@elonmusk) el 27 de Jul de 2017 a la(s) 6:10 PDT Así como quien no quiere la cosa Elon Musk ha contado en Instagram que el primer Falcon Heavy...

Tal y como estaba previsto un cohete Soyuz FG despegaba a las 17:41:12 del viernes 28 de julio de 2017, hora peninsular española, de la plataforma 1 del cosmódromo de Baikonur con la Soyuz MS-05 y sus tripulantes como carga. Es...

Impresión artística de una cápsula Orión en órbita A instancias de la administración Trump la NASA estaba dándole vueltas a la posibilidad de que la primera misión de una cápsula Orión, prevista para 2019, pudiera ser tripulada. Pero según un informe que...

La cápsula tripulada Soyuz MS-05 ya está lista en el cosmódromo de Baikonur para su lanzamiento rumbo a la Estación Espacial Internacional, previsto para las 17:41, hora peninsular española, del 28 de julio de 2017. Si todo va según lo previsto...
![imagen]()
Impresión artística de la CST-100 Starliner en órbita - Boeing Según la última revisión de la NASA del estado de las naves espaciales tripuladas que están diseñando Boeing y SpaceX podríamos estar a pocos meses de ver los primeros lanzamientos de prueba...
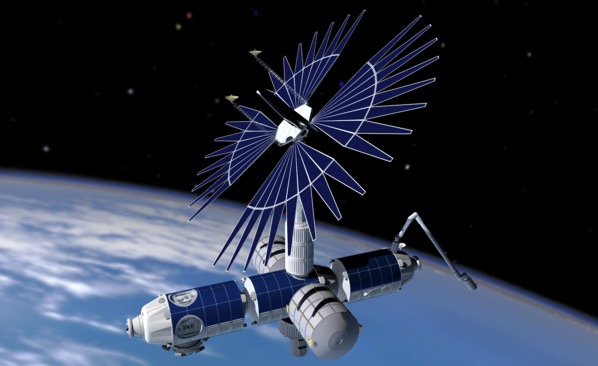
Con varios veteranos de la NASA en su equipo directivo, la empresa Axiom Space quiere construir la primera estación espacial privada. El primer paso será acoplar un módulo a la Estación Espacial Internacional en 2020 para ir probándolo. Se trata del...

Nada como el sonido de un motor de cohete para comenzar el día. El martes la NASA encendió el tercer motor RS-25 de los cuatro que impulsarán el cohete SLS. El encendido de prueba mantuvo el motor funcionando durante más de...
Por Nacho Palou -
27 JUL 2017
Un bonito póster de Julia Kuo para celebrar que estos días, hace 48 años, los primeros humanos andaban dando saltos por la superficie de la Luna. Una bonita combinación entre su aspecto retro y la idea futurista del turismo espacial que...
Por Nacho Palou -
25 JUL 2017
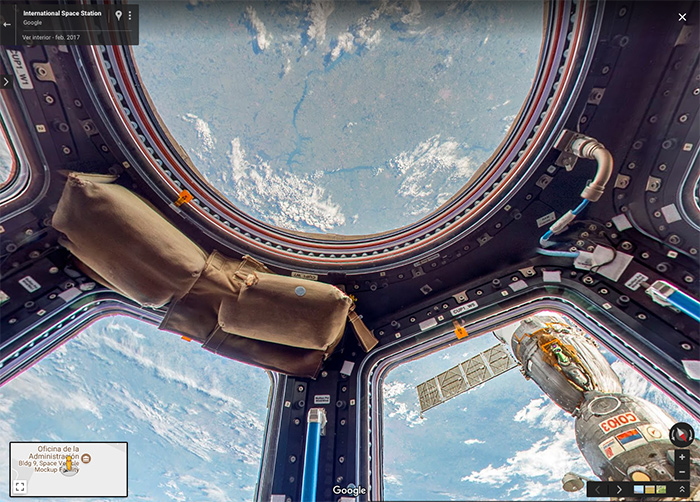
Vista de la Tierra desde la Cúpula de la ISS, observatorio y puesto de control de la Estación Espacial Internacional, cortesí de Google Street View. Desde ahora es posible recorrer la Estación Espacial Internacional en Google Street View y cotillear algunos de...
Por Nacho Palou -
21 JUL 2017

#LAST COMMAND sent #LISAPathfinder now fully passivated & shut down on a heliocentric disposal orbit #Eom— ESA Operations (@esaoperations) 18 de julio de 2017 Tras ejecutar los comandos para vaciar sus depósitos de combustible y desactivar su sistema eléctrico la sonda LISA...
El Int-Ball de la JAXA (la agencia espacial japonesa) es una especie de droide primigenio, un dron provisto de una cámara que flota libremente por la estación espacial grabando las actividades de los astronautas. El dron, del tamaño de un pomelo...
Por Nacho Palou -
20 JUL 2017

El Armstrong Flight Research Center (AFRC) de la NASA ha publicado en su canal de YouTube unos 300 vídeos históricos, clips y fragmentos de vídeo grabados en las últimas décadas. De entrada el AFRC tiene previsto incorporar unos 500 vídeos, en...
Por Nacho Palou -
19 JUL 2017

Hace unas semanas semanas en Warped Perception encendieron un cohete de carcasa transparente —construido en un tubo de vidrio— que dejaba ver su funcionamiento, cómo el combustible sólido se quemaba en su interior produciendo el chorro de gases de alta presión...
Por Nacho Palou -
19 JUL 2017
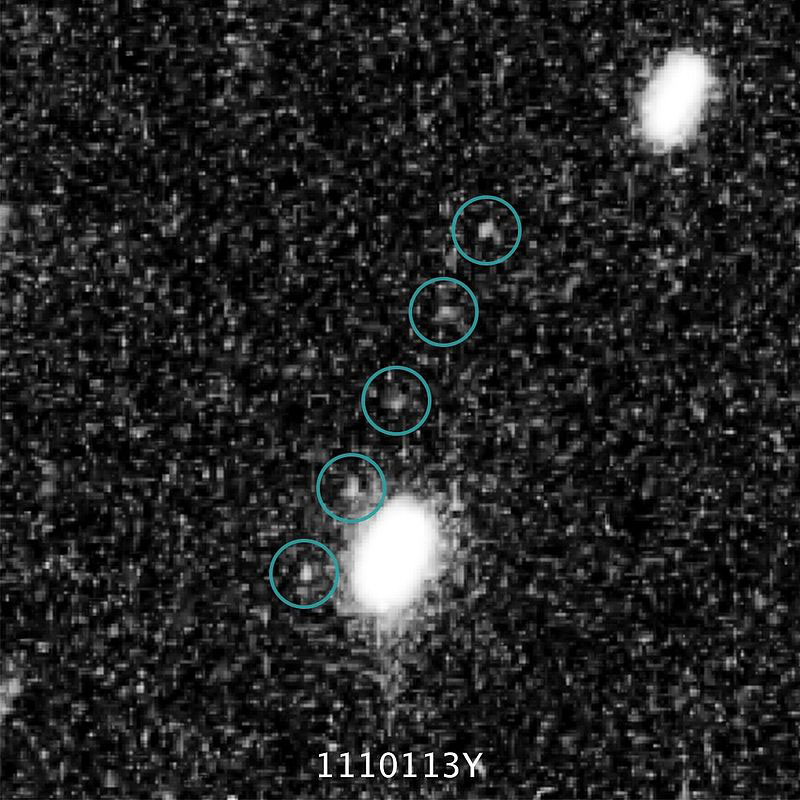
Impresión artística del encuentro de la New Horizons con un objeto del cinturón de Kuiper - NASA/JHUAPL/SwRI/Alex Parker Tras completar con éxito su misión de explorar Plutón, al que sobrevoló el 14 de julio de 2015, la sonda New Horizons de la...
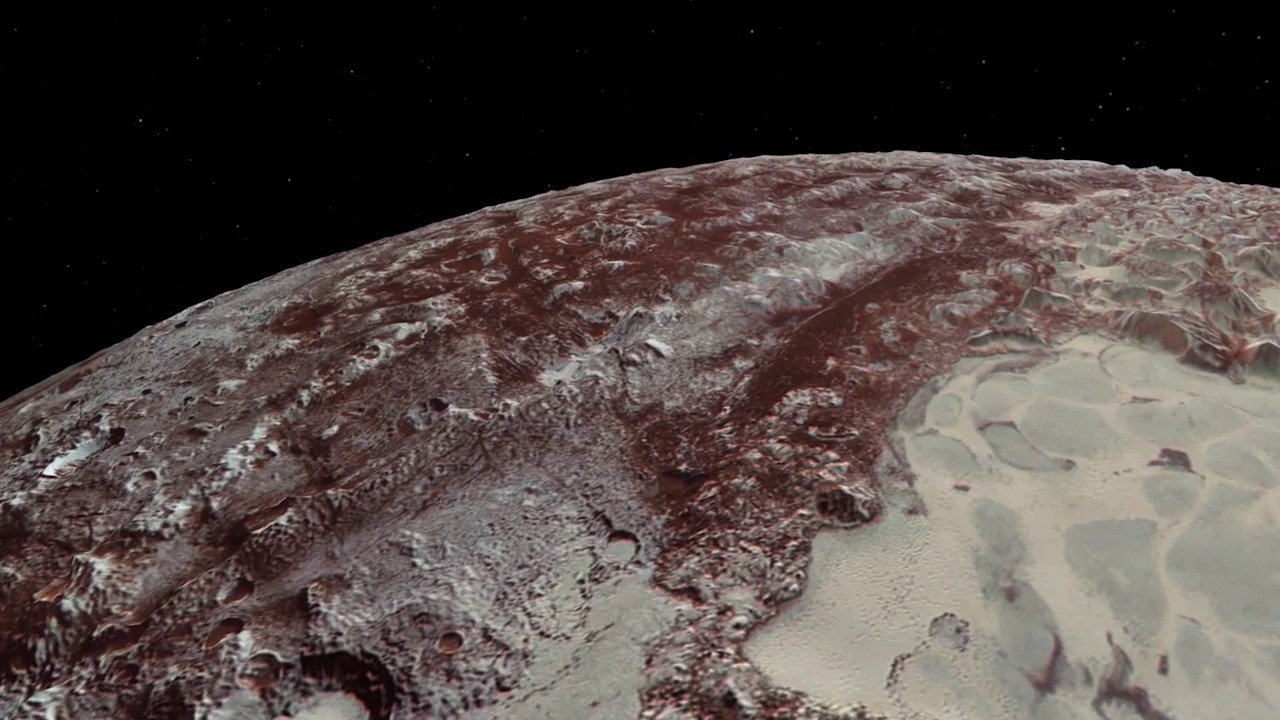
Este vídeo recrea cómo sería sobrevolar Plutón a partir de de datos y medidas de elevación obtenidos por la sonda New Horizons. Se trata de un mapeo digital de la superficie, modelado por Paul Schenk y John Blackwell del Instituto Lunar...
Por Nacho Palou -
18 JUL 2017
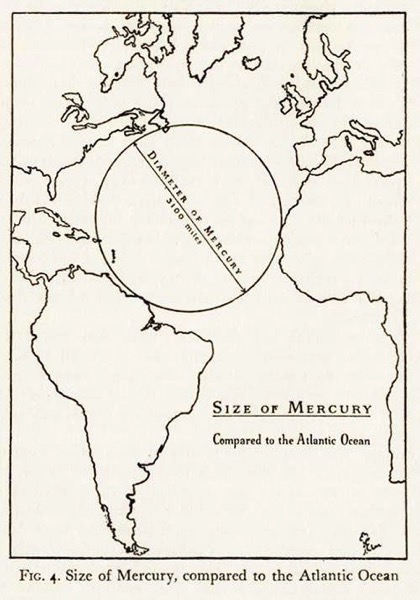
Desde la polémica expulsión de Plutón de la familia de planetas del sistema solar Mercurio pasó a ser no sólo el planeta más cercano al Sol sino también el más pequeño de la familia, con un diámetro de 4879,4 kilómetros. Es...
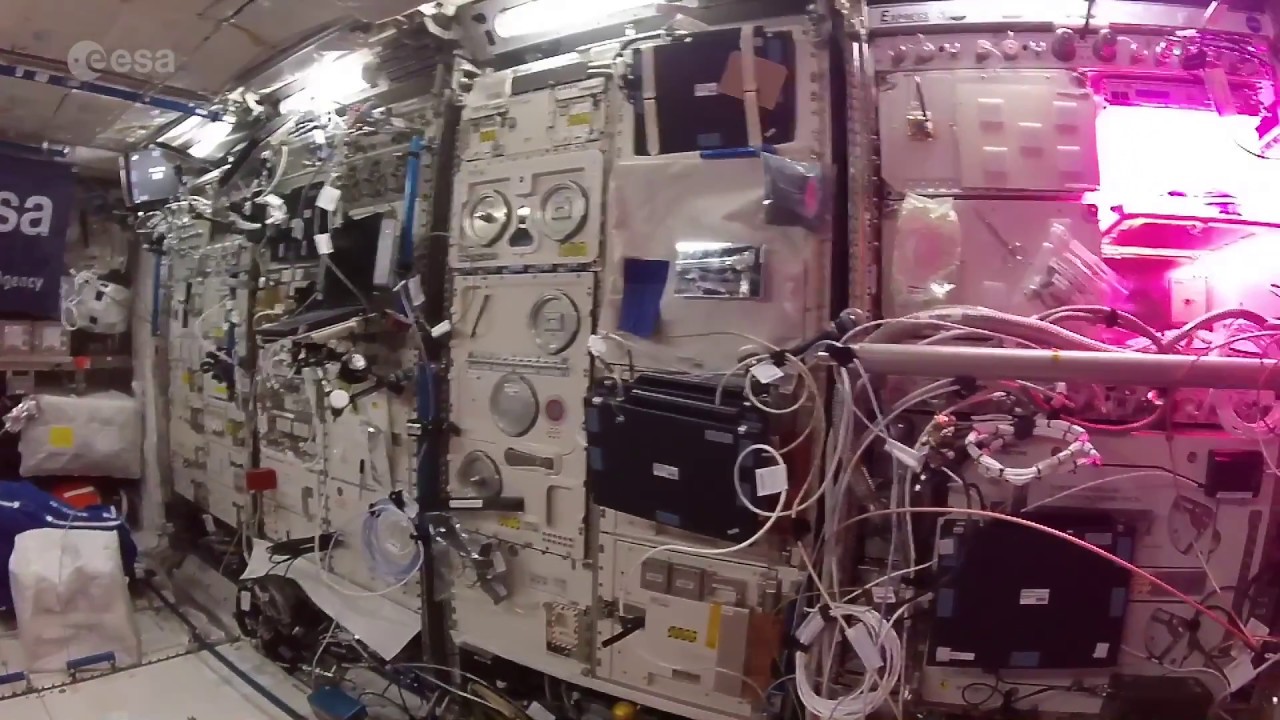
Aunque hace un año que terminó la misión Principia de Tim Peake en la Estación Espacial Internacional la Agencia Espacial Europea acaba de publicar este vídeo en el que hace una breve visita guiada al laboratorio Columbus. Entre otras cosas Columbus...
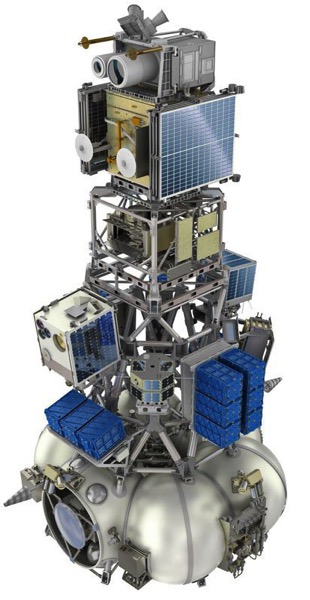
Un cohete Soyuz 2-1A lanzado desde el cosmódromo de Baikonur ha establecido un nuevo récord al poner en órbita un total de 73 satélites de todos los tamaños pertenecientes a operadores de los Alemania, Canadá, Estados Unidos, Noruega, Japón y Rusia. El...
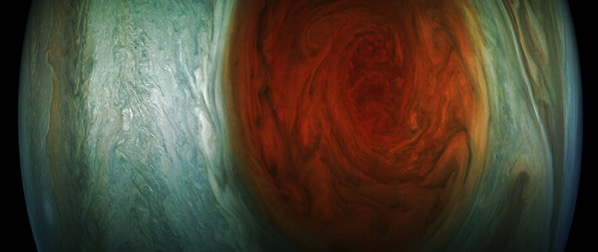
El 10 de julio de 2017 la sonda Juno de la NASA sobrevoló la Gran Mancha Roja de Júpiter a unos 9.000 kilómetros de altura sobre las nubes del planeta. Es lo más cerca que nos hemos acercado a ella nunca....
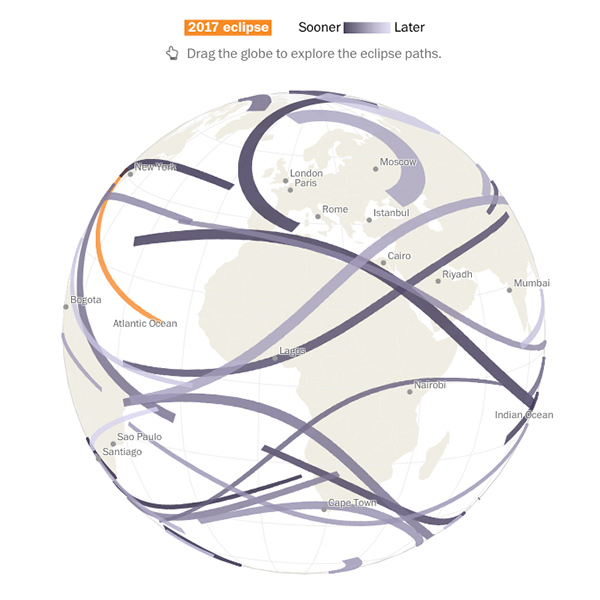
Este gráfico de The Washington Post muestra todos los eclipses solares que se producirán a lo largo de tu vida. Para configurarlo hay que introducir la fecha de nacimiento y arrastrar el globo terráqueo para dar con tu ubicación geográfica. Un...
Por Nacho Palou -
12 JUL 2017
El 11 de julio de 1979 el Skylab, la primera estación espacial estadounidense, terminaba sus días desintegrándose en la atmósfera terrestre, poniendo fin a una misión en la que la NASA había invertido millones de dólares. Pero para el australiano Stan...
Utilizando los datos obtenidos a través del radiotelescopio Alma (Atacama Large Millimetre/submillimetre Array, en Chile), un equipo de astrónomos han recreado una imagen tridimensional de las moléculas originadas en los restos de la supernova SN 1987A. En la animación el color...
Por Nacho Palou -
11 JUL 2017

Eliminar la toxicidad del suelo marciano y “enriquecerlo” puede ser más difícil de lo que se creía hasta ahora. Marte es un planeta todavía más hostil de lo que pensábamos hasta ahora. Un nuevo estudio ha llegado a la conclusión de que...
Por Nacho Palou -
10 JUL 2017

Este collar con el Sistema Solar tiene una pinta estupenda. Pero… ¡caveat emptor! Como suele suceder en estas cosas no está escala, aunque el generoso tamaño de los dos gigantes gaseosos (Júpiter, Saturno) le confieren un aspecto bastante equilibrado en cuanto...

Estos son algunos de los desafíos que supone para un humano viajar a Marte. Es probable que alguna suene dramática, pero el caso es que por h o por b para un humano viajar a Marte y vivir allí es bastante...
Por Nacho Palou -
5 JUL 2017

RELIVE the landing of NASA's Mars Pathfinder spacecraft on the red planet, which occurred 20 years ago today. pic.twitter.com/TlErOqLqte— Spaceflight Now (@SpaceflightNow) 5 de julio de 2017 El 4 de julio de 1997 aterrizaban sanos y salvos en Marte la sonda Mars...

Recientemente la NASA ha aprobado que del sistema de protección contra asteroides conocido como Dart (Double-Asteroid Redirection Test) pase a la siguiente fase de desarrollo, al diseño preliminar. El sistema está basado en la técnica del impactador cinético, que esencialmente consiste...
Por Nacho Palou -
4 JUL 2017

Después de un proceso de selección de un año al que se presentaron 3.772 candidatos la Agencia Espacial Canadiense ha escogido a Jenni Sidey y Joshua Kutryk como miembros de su cuarta promoción de astronautas. Jennifer Sidey trabajó como ingeniera mecánica,...

Un amerizaje a 420 kilómetros de la costa de California a las 14:14 del 3 de julio de 2017, hora peninsular española, ponía fin a la misión SpX-11, llevada a cabo por la primera cápsula de carga Dragon reutilizada. Tras los...
El programa espacial chino ha sufrido un revés con el fallo del segundo cohete Larga Marcha 5, que el 2 de julio de 2017 tenía que haber puesto en órbita el satélite de telecomunicaciones Shijian-18. La causa parece estar en un...

El velcro1, inventado en 1948 el ingeniero suizo Georges de Mestral, es un sistema de cierre y fijación que se basa en dos tejidos diferentes: uno de ellos con ganchos y otro con bucles que, al juntarse se enganchan y “enredan”...
Por Nacho Palou -
3 JUL 2017
En resumen, La historia del bolígrafo espacial que costó millones de dólares desarrollar, cuando era más fácil usar un simple lápiz. No, nadie quiere lápices soltando fragmentos y polvo de grafito en una nave espacial. El Big Bang no es el...
Por Nacho Palou -
30 JUN 2017

Aunque goza de muy buena salud general, las ruedas del rover marciano Curiosity de la NASA llevan tiempo siendo una preocupación porque están sufriendo un desgaste más fuerte del inicialmente previsto. El problema está en que cuando está subiendo una cuesta...

El satélite de comunicaciones híbrido Hellas Sat 3–Inmarsat S European Aviation Network y el GSAT-17 fueron los satélites número 600 y 601 en ser puestos en órbita por Arianespace, en este caso en concreto con un Ariane 5. Hellas Sat 3...

Una buena forma de celebrar los dos lanzamientos casi consecutivos (en 48 horas) de SpaceX, incluyedo en ambos casos la recuperación la primera fase del cohete con un aterrizaje vertical, es viendo aterrizar una versión virtual y en miniatura del Falcon...
Por Nacho Palou -
28 JUN 2017
Mientras PLATO entra en su fase de diseño y construcción hay otra misión de la Agencia Espacial Europea relacionada con planetas extrasolares que avanza hacia su lanzamiento. Se trata de Cheops, de CHaracterising ExOPlanets Satellite, o Satélite para la Caracterización de...
Tras hacer las pruebas pertinentes con el panel solar enrollable ROSA en el exterior de la Estación Espacial Internacional el plan era enrollarlo de nuevo y meterlo en el «maletero» de la cápsula de carga Dragon SpX-11 para deshacerse de él....

China tiene todos los boletos para ser el próximo país que vuelva a colocar una persona sobre al superficie de la Luna –ojalá una mujer–, aunque sólo sea porque hay una voluntad política clara detrás del programa espacial. Una de las...
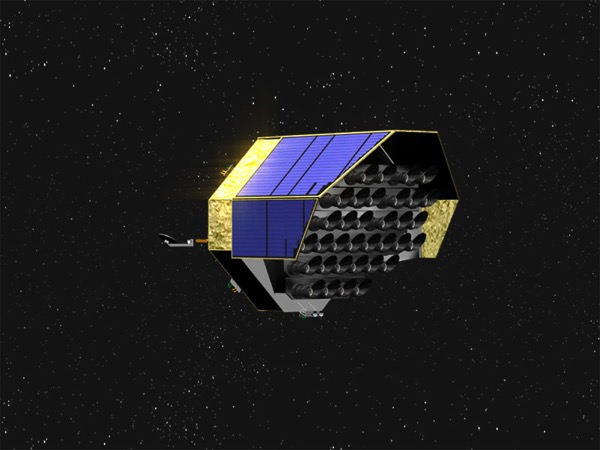
Además de dar el visto bueno a LISA la Agencia Espacial Europea ha decidido adoptar la misión PLATO. PLATO, de Planetary Transits and Oscillations of stars, o Tránsitos Planetarios y Oscilaciones estelares, tiene como objetivo principal buscar tránsitos planetarios observando hasta un...

Sped up version of today's rocket landing on the Droneship Just Read the Instructions (guess it did) Una publicación compartida de Elon Musk (@elonmusk) el 25 de Jun de 2017 a la(s) 2:41 PDT Un cohete Falcon 9 de SpaceX ha...

SpaceX tiene otra misión lanzada con éxito en su haber, la del Bulgariasat-1, el primer satélite de telecomunicaciones búlgaro. Pero una vez más el objetivo primario de la misión queda casi en segundo plano frente al cohete utilizado para ella pues...
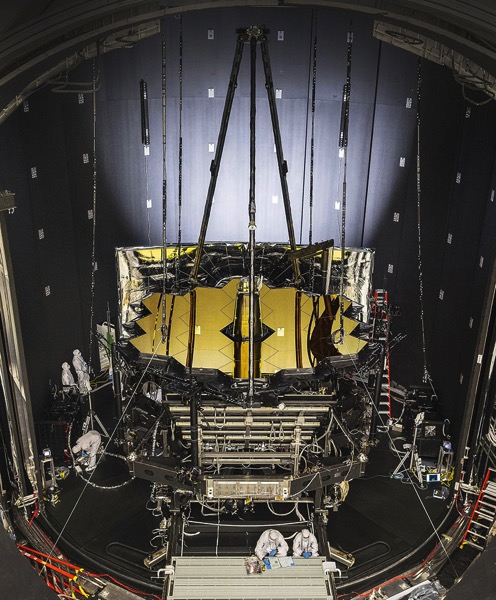
Después de haber sido sometido con éxito a las pruebas de vibración y sonido que buscaban asegurarse de que podría sobrevivir a su lanzamiento el sistema óptico del Telescopio Espacial James Webb está ya en el Centro Espacial Johnson de la...

Canon –sí, Canon, la empresa fundamentalmente conocida por sus productos fotográficos– acaba de poner su primer satélite artificial en órbita. Diseñado por el Laboratorio de tecnología Espacial de la empresa el CE-SAT 1 es un pequeño satélite de 50×50×70 centímetros que...
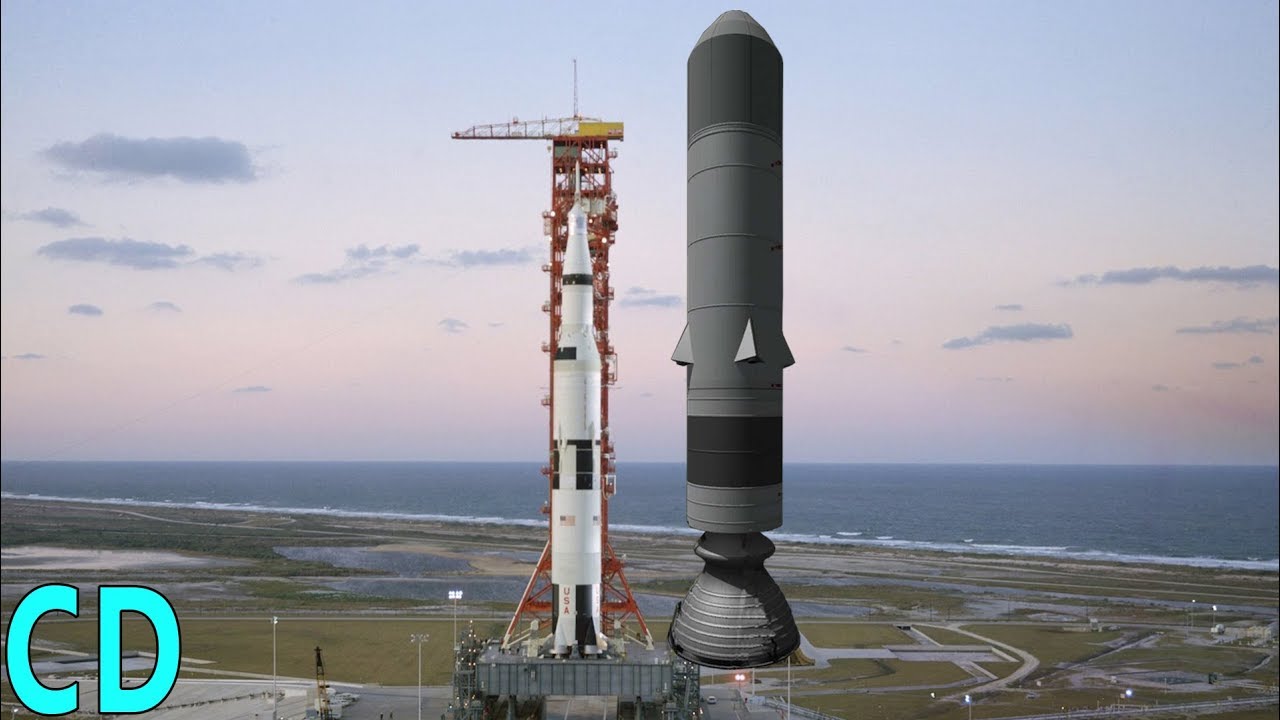
No había oído hablar nunca del Sea Dragon, probablemente el cohete más tocho jamás diseñado, aunque nunca construido, con una altura de 165 metros y un diámetro de 23 frente a los 111 y 10 respectivamente de un Saturno V. El...

Tal y como era de prever la Agencia Espacial Europea ha seleccionado la misión LISA como L3, la tercera misión de la clase L de su programa de investigación Visión Cósmica. Las misiones L son las más grandes y ambiciosas de...
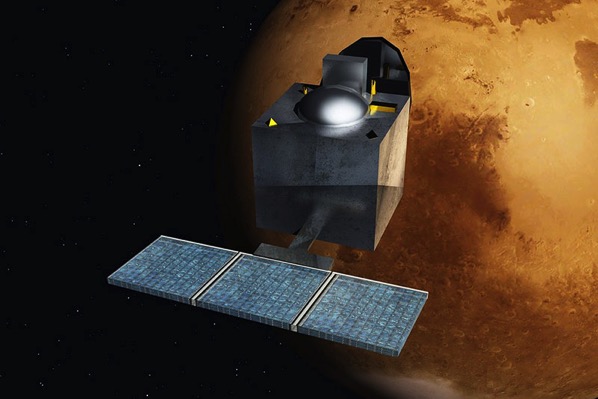
What is red, is a planet and is the focus of my orbit? pic.twitter.com/HDRWjOcPus— ISRO's Mars Orbiter (@MarsOrbiter) 24 de septiembre de 2014 Aunque estaba diseñada para durar 180 días en órbita la sonda india Mangalyaan, también conocida como Mars Orbiter Mission,...

Este vídeo tiene dos problemas: uno el SVV; otro que no está a escala, como cuando Doc Brown le ensaña a Marty la maqueta del Delorean que va a viajar en el tiempo… Peeero perdonamos ambas circunstancias, porque es sencillamente genial....

Desde El robot de Platón nos llega este genial y aclarativo vídeo acerca de los mitos que circulan acerca de las fotos «reales» de nuestro planeta Tierra tomadas desde el espacio, principalmente las de NASA, claro. La referencia a «reales» se...
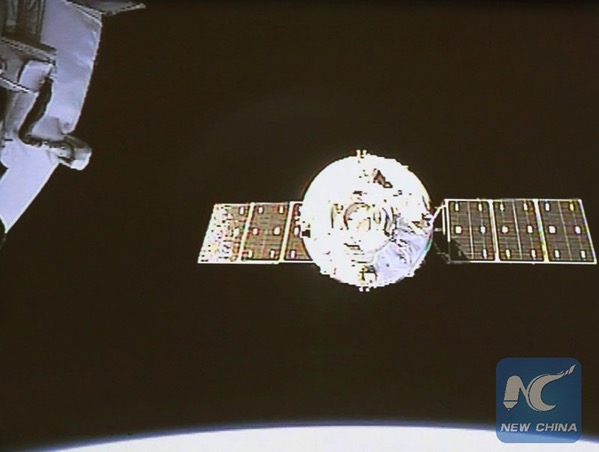
El carguero espacial chino Tianzhou-1 ha realizado con éxito su segundo acoplamiento en órbita con el laboratorio espacial Tiangong–2. El lunes 19 de junio de 2017 el carguero y el laboratorio espacial se desacoplaron y después de alejarse hasta una distancia de...

La inmensa mayoría de las naves espaciales usan paneles solares para obtener la electricidad que necesitan para funcionar. Durante el lanzamiento los paneles están plegados, un poco como si fueran piezas de origami, y se extienden una vez en órbita. Pero...

China tiene planeado enviar astronautas a la Luna hacia el año 2036. De ser así en Jalopnik explican por qué debería haber una mujer taikonauta entre la tripulación: para que China sea la primera en algo relevante relacionado con la carrera espacial....

Hace poco hablábamos de los sistemas de escape diseñados para poner a salvo a los tripulantes de una nave espacial cuando las cosas se ponen mal en la plataforma de despegue o en las primeras fases del vuelo… y justo hoy...

Con precisión absoluta el cohete Soyuz 2-1A portador de la cápsula de carga Progress MS-06 despegaba de la plataforma de Gagarin del cosmódromo de Baikonur a las 11:20:13 del 14 de junio de 2017, hora peninsular española, rumbo a la Estación...

Todo está listo en el cosmódromo de Baikonur para el lanzamiento de la cápsula de carga Progress MS-06 desde la plataforma de Gagarin rumbo a la Estación Espacial Internacional. Si todo va según lo previsto el Soyuz 2-1A que la lleva...

Este curioso instrumento llamado familiarmente Globus por los soviéticos era un instrumento de navegación espacial mecánico, que se utilizó en las misiones tripuladas a partir de 1961 para que los cosmonautas supieran por donde se encontraban en sus misiones orbitales y...

How super cool this is! Our robot arm releases Cygnus and the spaceship flies away! Moments like this happen all the time on @Space_Station. pic.twitter.com/JzfsTA2B0Z— Jack Fischer (@Astro2fish) 8 de junio de 2017 Una reentrada controlada en la atmósfera sobre el Pacífico...

Aunque la misión de la cápsula de carga Dragon SpX-11 es histórica porque es la primera vez que se reutiliza una de estas cápsulas hay otro motivo que la hace doblemente histórica: dentro de la carga que ha llevado a la Estación...

Su nombre completo es Distance Control of Rocket-propelled Miniature Exploration Robot (Robot explorador en miniatura que se impulsa con cohetes a distancias controladas) y ha sido diseñado y contrsuido por investigadores de la agencia espacial japonesa (JAXA). El uso de cohetes...
Por Nacho Palou -
9 JUN 2017

Después de leer la anotación de Nacho sobre los mecanismos de escape de las cápsulas tripuladas terminé dando con este vídeo del lanzamiento del Little Joe II A-003. Los Little Joe fueron unos cohetes diseñados precisamente para probar el sistema de...

Kayla Barron, Zena Cardman, Raja Chari, Matthew Dominick, Bob Hines, Warren Hoburg, Jonny Kim, Robb Kulin, Jasmin Moghbeli, Loral O'Hara, Frank Rubio y Jessica Watkins. Cinco mujeres y siete hombres son las 12 personas que la NASA ha seleccionado como la...

Ya habíamos tenido ocasión de ver cómo aterrizaba en vertical una primera etapa del cohete Falcon 9 visto desde un dron a cierta distancia. Este otro vídeo de un aterrizaje más reciente de la primera etapa del cohete Falcon 9 resulta...
Por Nacho Palou -
7 JUN 2017
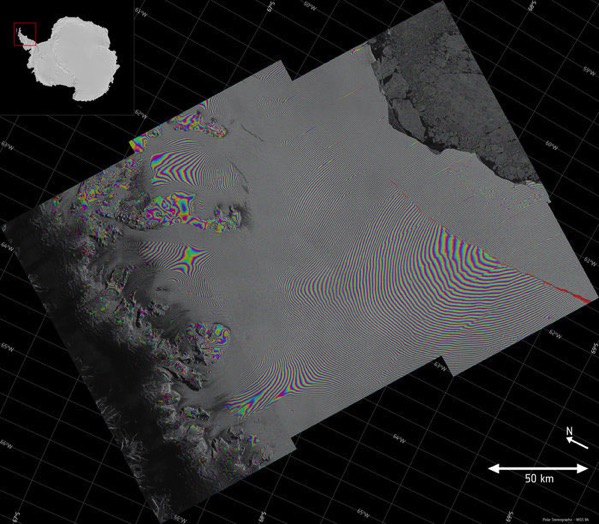
Interferograma de la barrera de Larsen C - Abril 2017 La gigantesca plataforma de hielo de la Antártida conocida como barrera de hielo Larsen C está a punto de desprenderse. La única duda es cuándo terminará por hacerlo, no si terminará por...
Tras ganarle la carrera por la Luna a la Unión Soviética el interés del gobierno de los Estados Unidos en el programa Apollo se desvaneció rápidamente, ayudado sin duda por el revuelto clima político y social de la época. Así que...
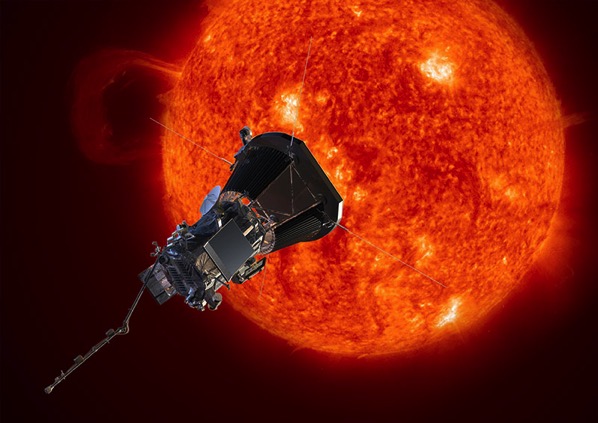
La NASA acaba de anunciar que la sonda antes conocida como Solar Probe Mission ahora se llama Parker Solar Probe. Su nuevo y definitivo nombre es en honor a Eugene N. Parker, el astrofísico que predijo la existencia del viento solar...

Ya casi no es novedad que una cápsula de carga Dragon llegue a la Estación Espacial Internacional, pero en el caso de la Dragon SpX-11 es una noticia importante porque se trata de la Dragon C106, la misma cápsula que llevó...

Tras más de diez años de desarrollo la India ya cuenta con un lanzador pesado propio: a las 13:58, hora peninsular española, del 5 de junio de 2017 el primer lanzamiento de un GSLV Mk. III colocaba en órbita de transferencia...

La cuenta atrás está en marcha en el Centro Espacial Satish Dhawan de la India para el primer lanzamiento orbital de un cohete GSLV Mk. III, previsto para las 13:58, hora peninsular española, del lunes 5 de junio de 2017. Con...
Aunque en principio iba a permanecer atracada en la Estación Espacial Internacional hasta finales de julio de 2017 la Cygnus OA-7 John Glenn ha empezado la última parte de su misión el 4 de junio. Estará una semana más en órbita...

La cápsula de carga Dragon C106, que ya había volado al espacio en la misión SpX-4, está de nuevo en el espacio en la misión SpX-11. Es la primera vez que se reutiliza una de estas cápsulas, así que de nuevo...
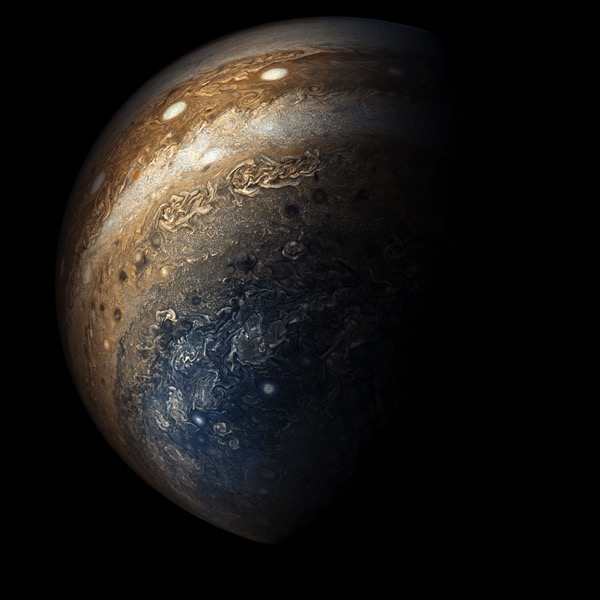
Además de vídeo de la última aproximación de la sonda Juno de la NASA a Júpiter, Seán Doran ha cogido una de las imágenes procesada por el equipo de la misión y Gerald Eichstad y la ha convertido en una impresionante...

Tras años de desarrollo Stratolaunch Systems, la empresa creada por Paul Allen, uno de los fundadores de Microsoft, ha presentado en público el Roc, su avión lanzacohetes, que es el avión de mayor envergadura del mundo. Lo hemos contado para El...

Thomas Pesquet, el astronauta de lacionalidad francesa de la Agencia Espacial Europea, está de vuelta en la Tierra desde el 2 de junio de 2017 a las 16:10, hora peninsular española, tras 196 días en el espacio que incluyen dos paseos...
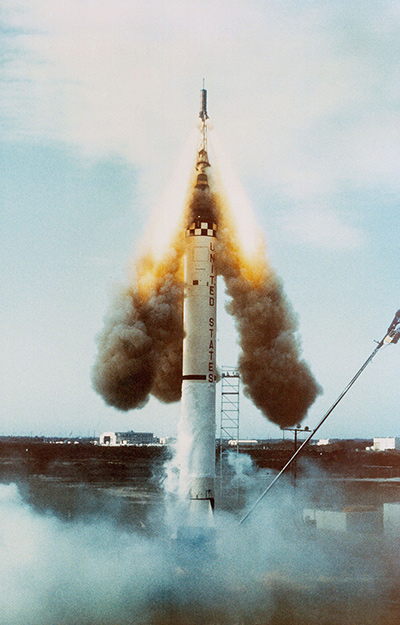
La misión Soyuz 7K-ST No.16L o Soyuz T-10-1 debía partir el 26 de septiembre de 1983 con destino a la estación espacial rusa Salyut 7. Sin embargo, durante la cuenta atrás para el lanzamiento el cohete comenzó a arder minuto y...
Por Nacho Palou -
2 JUN 2017

Este vídeo de Curious Droid es tan impactante como interesante: es una reflexión sobre las opciones que existen para defenderse en caso de que se produjera un ataque con misiles balísticos intercontinentales nucleares. Algo tan espantoso como dentro del reino de...

El 12 de febrero de 1985 una serie de errores por parte de los controladores de la misión hicieron que la estación espacial Salyut 7 quedara inutilizada en órbita, aunque afortunadamente en aquel momento no estaba ocupada. La misión de Vladimir...

No tenía en mi radar el XS-1, Experimental Spaceplane 1, Avión Espacial Experimental 1, que quiere construir el departamento de defensa de los Estados Unidos. El objetivo es poder colocar satélites de hasta casi 1.400 kilos en órbita terrestre con muy...
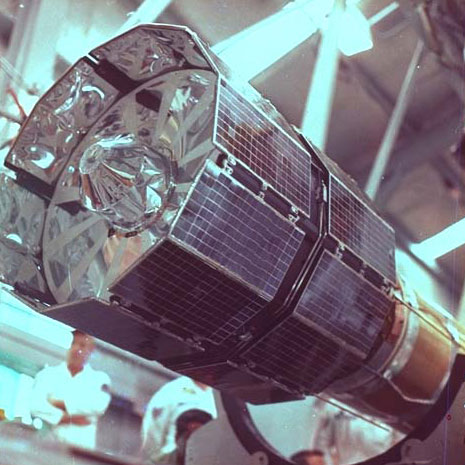
Este es el satélite artificial ESRO 2A, ya acoplado a la etapa final de su lanzador, un cohete Scout. Lanzado el 29 de mayo de 1967, el ESRO 2A fue el primer satélite artificial de la ESRO, la European Space Research...

El pasado 25 de mayo compañía privada Rocket Lab lanzó su primer cohete Electron, en una misión bautizada It's a Test, desde la plataforma de lanzamiento localizada en Nueva Zelanda. Ese lanzamiento agrupa varios logros: Primer lanzamiento de Rocket Lab Primer...
Por Nacho Palou -
29 MAY 2017
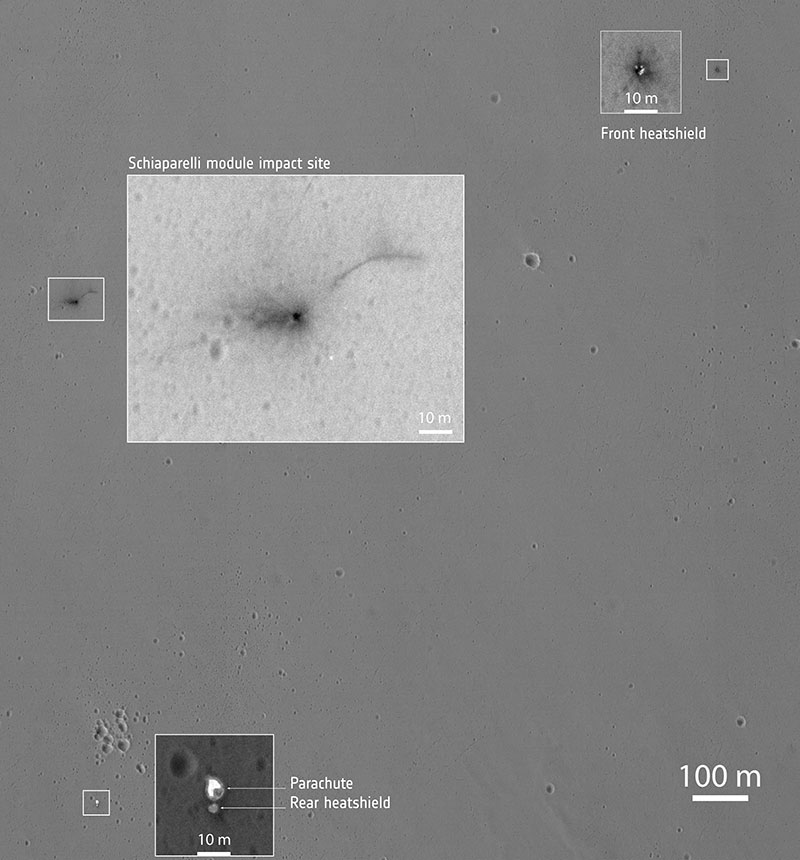
Restos de Schiaparelli en detalle – NASA/JPL-Caltech/University of Arizona La Agencia Espacial Europea ha publicado el informe sobre los hechos que hicieron que el 19 de octubre de 2016 el aterrizador Schiaparelli se estampara contra la superficie de Marte a unos 150...
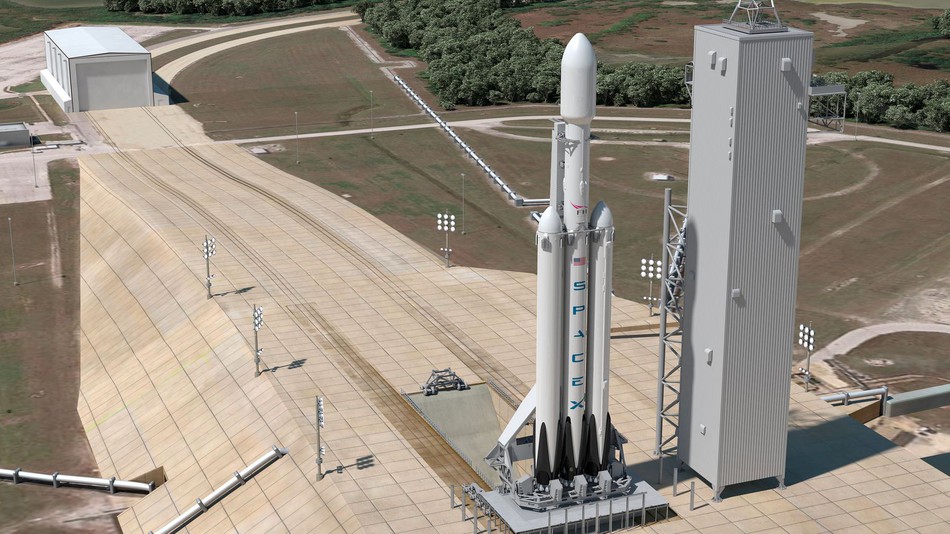
First static fire test of a Falcon Heavy center core completed at our McGregor, TX rocket development facility last week. pic.twitter.com/tHUHc1QiKG— SpaceX (@SpaceX) 9 de mayo de 2017 En lo que a potencia y capacidad de carga se refiere el Falcon Heavy...
Por Nacho Palou -
26 MAY 2017

Este brillante proyecto en Kickstarter titulado Pioneer Plaque: A Message from Earth reproduce la famosa placa de las sondas espaciales Pioneer que se lanzaron en 1972 y 1973 (Pioneer 10 y 11, respectivamente). Al igual que en otras iniciativas de para...

La NASA ha confirmado la misión Psyche que explorará “uno de los objetos más intrigantes del cinturón de asteroides”. Se trata del asteroide llamado 16 Psyche que óbita el Sol a tres veces la distancia que separa el Sol de la...
Por Nacho Palou -
25 MAY 2017

El Electron Rocket de la compañía Rocket Lab despegó ayer por la tarde (hora local) y alcanzó el espacio pocos minutos después. En este primer lanzamiento de prueba el cohete no alcanzó la órbita terrestre como estaba previsto. Sin embargo el...
Por Nacho Palou -
25 MAY 2017

Cuando un astronauta parte en una misión tiene prácticamente programado al minuto lo que hará durante sus turnos de trabajo. Pero a veces ocurren imprevistos, como el que hizo que Peggy Whitson y Jack Fischer tuvieran que llevar a cabo un...

Watch every SpaceX rocket landing attempt in 100 seconds pic.twitter.com/AqvnWeWRj9— The Verge (@verge) 21 de mayo de 2017 Con la recuperación de la primera etapa del Falcon 9 FT que lanzó la carga secreta conocida como NROL-76 van diez veces que SpaceX...
En Warped Perception construyen un cohete usando un tubo de vidrio transparente, el cual permite ver cómo funciona y cómo el combustibles sólido (la pólvora) se quema en su interior. El vídeo está grabado en 4K y alta velocidad, lo que...
Por Nacho Palou -
22 MAY 2017

La empresa funeraria Elysium Space ha anunciado que está casi preparada para lanzar su segundo nanosatélite cargado con cenizas humanas. La misión, llamada Elysium Star II (el I se lanzó en 2015) contendrá las urnas fúnebres de un centenar de personas...
Por Nacho Palou -
19 MAY 2017

Según explican investigadores de la NASA en NASA's Van Allen Probes Spot Man-Made Barrier Shrouding Earth, la actividad humana ha producido una barrera artificial alrededor de la Tierra que tiene su origen en la emisión terrestre de frecuencias de radio de...
Por Nacho Palou -
19 MAY 2017

Este corto de los hermanos Christian y Wolfgang Stangl, «dedicado a aquellos que creen en la conquista pacífica del espacio», hace uso de miles de fotografías originales de la NASA, tomadas por los astronautas del programa Apolo animadas mediante diferentes técnicas...
Por Nacho Palou -
18 MAY 2017
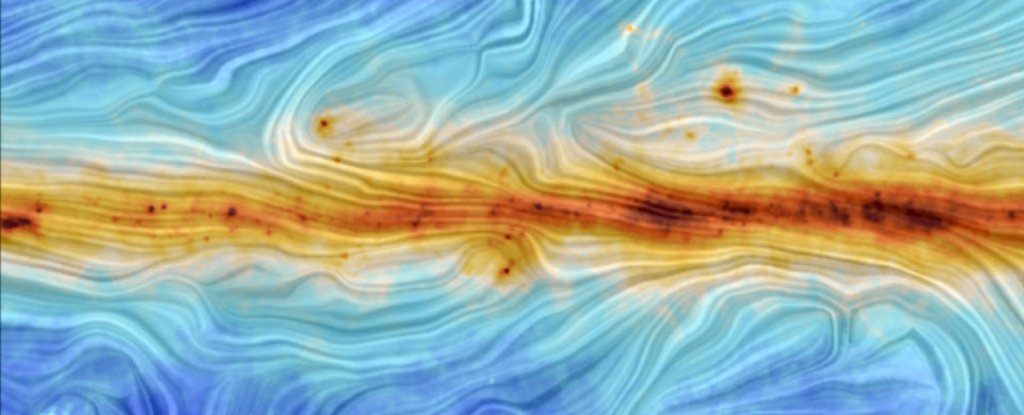
El Puente Magallánico une dos de las nubes de Magallanes / Foto: ESA/Plank Tal y como cuentan en Science Alert ya hay pruebas de la existencia de un gigantesco campo magnético en un puente que conecta dos galaxias, más exactamente entre la...

El KalamSat es hasta la fecha el satélite artificial más ligero: pesa 64 gramos tiene el tamaño de un cubo de Rubik pequeño. Está fabricado por impresión 3D usando un compuesto plástico reforzado con fibra de carbono y si todo va...
Por Nacho Palou -
16 MAY 2017
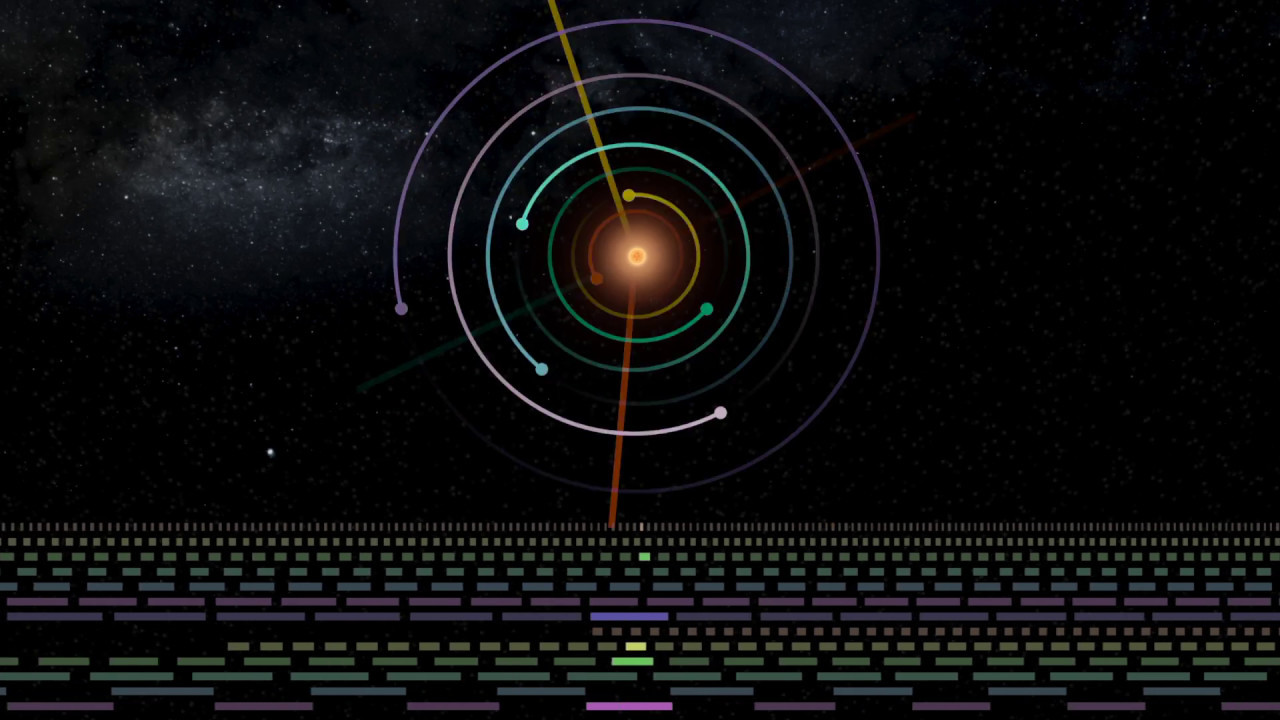
Aprovechando aquello de la armonía de las esferas, un concepto de Pitágoras que maravilló a los griegos y obsesionó al mismísimo Kepler, unos astrofísicos de la Universidad de Toronto han recreado en forma de música el sistema solar Trappist-1 recientemente descubierto...
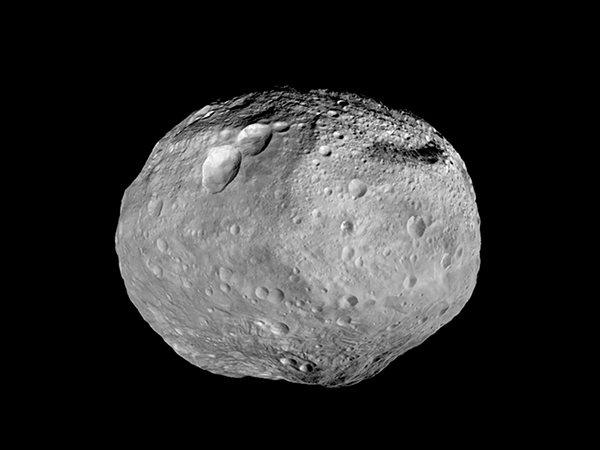
Según recoge la publicación IBT China tiene un programa espacial muy ambicioso, que incluye explorar la Luna y asumir los “enromes costes y riesgos de la exploración espacial” y desarrollar la minería espacial que le daría acceso a los minerales y...
Por Nacho Palou -
12 MAY 2017
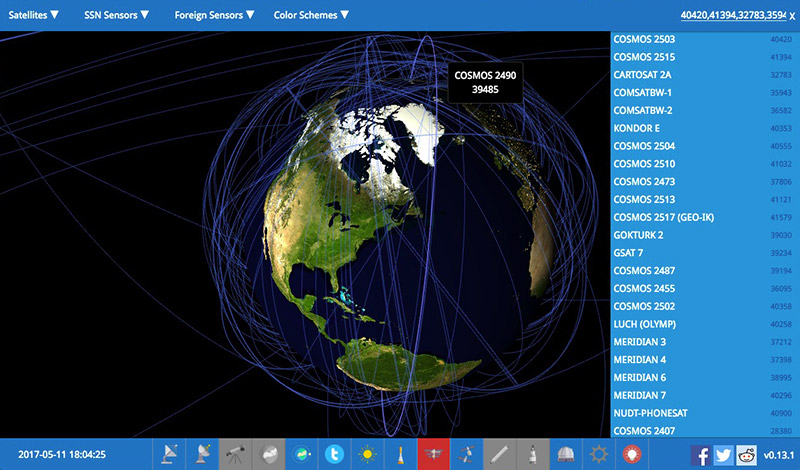
Keeptrack Space es una especie de «planetario al revés» para hacer las delicias de los espaciotrastornados: permite ver la Tierra desde el espacio y junto a ella todos los satélites que la orbitan. Hay literalmente miles de ellos pero la aplicación...
Amy Shira Teitel cuenta la historia del Suitsat, el traje espacial Orlan MK que en 2006 pasó de servir como traje protector para actividades extravehiculares en el espacio a satélite artificial. Normalmente los desechos producidos por la Estación Espacial Internacional se...
Por Nacho Palou -
8 MAY 2017

El orbitador no tripulado (a lo dron espacial) X-37B aterrizó ayer domingo después de 718 días en órbita. Despegó en Mayo de 2015 y tomó tierra en el Kennedy Space Center de Florida por primera vez (en anteriores episodios había tomado...
Por Nacho Palou -
8 MAY 2017
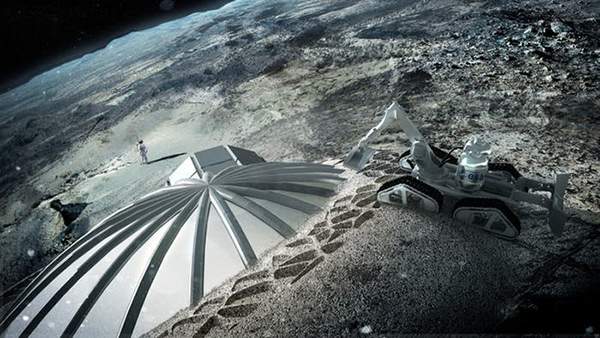
Según Inverse, aunque el objetivo de la NASA para los próximos 20 años es enviar humanos a Marte la agencia espacial no ignora por ello volver al “octavo continente”, Esta semana la NASA ha dirigido una petición de información a la...
Por Nacho Palou -
4 MAY 2017

La Agencia Espacial Europea (ESA) ha desarrollado un método para fabricar ladrillos empleando sólo polvo lunar y la luz del Sol. Para desarrollar la idea los científicos usaron polvo lunar simulado, formado en realidad por materiales volcánicos cocidos en un horno...
Por Nacho Palou -
4 MAY 2017

Si los planespotters de la tierra muestran sus interés por la aviación fotografiando aviones, el astronauta francés Thomas Pesquet hace lo propio fotografiando aeropuertos desde la Estación Espacial Internacional, a 400 km sobre la superficie del planeta. El aeropuerto de Barcelona...
Por Nacho Palou -
3 MAY 2017
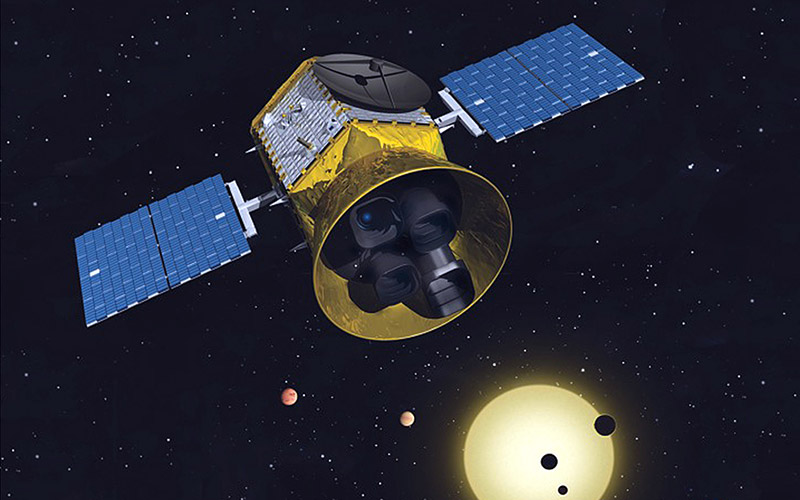
Los técnicos de Orbital ATK –la misma empresa que fabrica las cápsulas de carga Cygnus– está dando los últimos toques a TESS, el nuevo observatorio espacial para buscar planetas extrasolares de la NASA. TESS, de Transiting Exoplanet Survey Satellite, o Satélite...

SpaceX ha vuelto a conseguir recuperar la primera etapa de otro Falcon 9 FT tras un lanzamiento, en este caso de la carga secreta conocida como NROL-76. 21 minutos después del lanzamiento la primera etapa del cohete tomaba tierra en la...

Según cuenta NasaSpaceflight todo avanza para el primer lanzamiento de un cohete Falcon Heavy, que podría tener lugar en el verano de 2017. Un Falcon Heavy consiste de, grosso modo, tres Falcon 9 Heavy colocados lado a a lado que despegan...

El 30 de abril de 1967 la sonda Surveyor 3 de la NASA enviaba la primera imagen en la que veíamos la superficie de la Tierra desde la de la Luna; era la primera vez que veíamos nuestro planeta desde la...
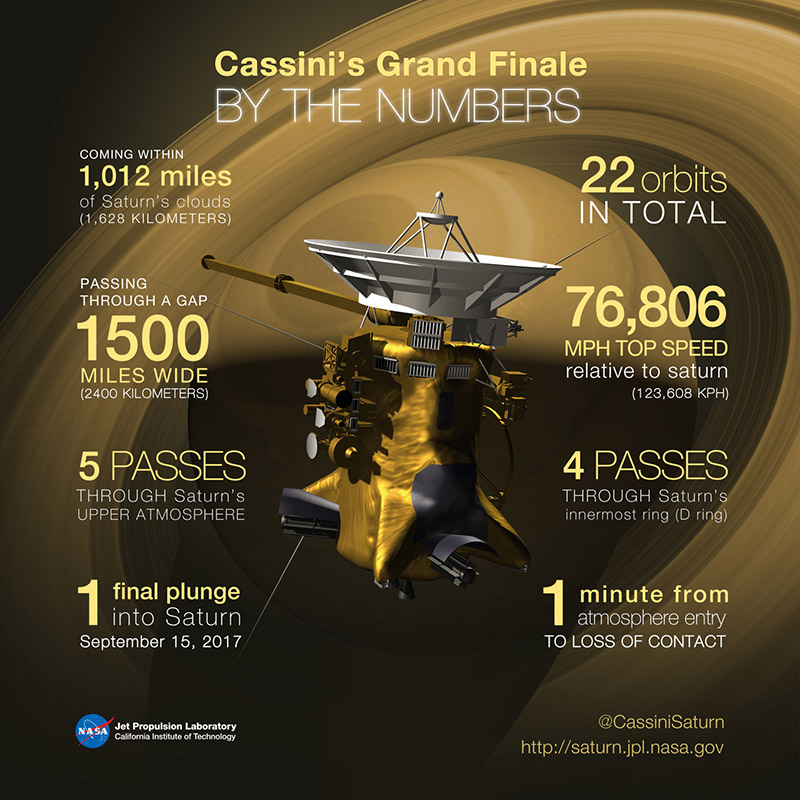
Dado que se está quedando sin combustible y para evitar un eventual choque contra cualquiera de sus lunas o contra los anillos la misión de la sonda Cassini terminará con su destrucción en la atmósfera de Saturno. Pero dado que los...

Tenía que pasar: los vídeos en 360º llegan a la Estación Espacial Internacional, en este caso grabado por Thomas Pesquet con una cámara enviada por el CNES, el Centro Nacional de Estudios Espaciales francés. #Proxima Visite à 360° de l'ISS avec...

Lego ha dado a conocer las primeras fotos del kit de Lego Saturno V [LEGO Ideas 21309], kit que sin duda hará las delicias de los espaciotrastornados – que ya pueden empezar a meter dinero en la hucha para cuando se...
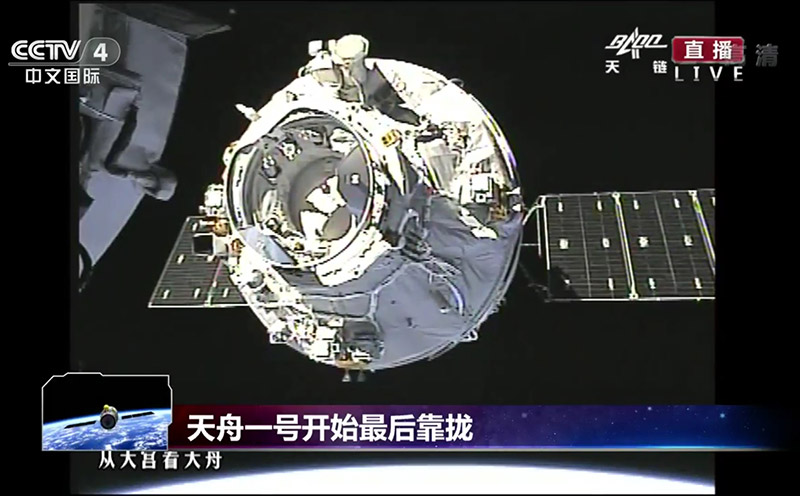
El programa de la agencia espacial China para construir una estación espacial permanentemente tripulada ha dado otro paso adelante con el acoplamiento del carguero espacial Tianzhou-1 con el laboratorio espacial Tiangong–2. Ocurrió a las 6:16 del 22 de abril de 2017,...

Un reciente informe del interventor general de la NASA advierte del peligro que corre la agencia de quedarse sin trajes para paseos espaciales. Los trajes que utilizan los astronautas de la agencia en la actualidad son los denominados Unidad de Movilidad...
La última fase de la misión de la sonda Cassini de la ESA y la NASA incluye 22 pasadas entre los anillos de Saturno y el planeta, algo que ninguna nave espacial había hecho antes. La primera de estas pasadas tuvo...

El primer grupo de astronautas de la NASA, los siete del Mercury, estaba formado exclusivamente por hombres, entre otras cosas porque uno de los requisitos de la agencia era que fueran pilotos de prueba con experiencia en reactores militares. Y en aquella...

Añade un poco del espacio exterior a tu espacio de trabajo con estas chinchetas que representan los ocho planetas del Sistema Solar diseñadas por Duncan Shotton. Los modelos están fabricados en el Reino Unido y pintados a mano en Japón, donde...
Por Nacho Palou -
25 ABR 2017

Siempre cuento que lo que más me impresionó de ver el lanzamiento de un transbordador espacial en directo fue el sonido, la forma en la que restallaba el aire, incapaz de transmitir el poderío. En éste vídeo se puede ver –y...
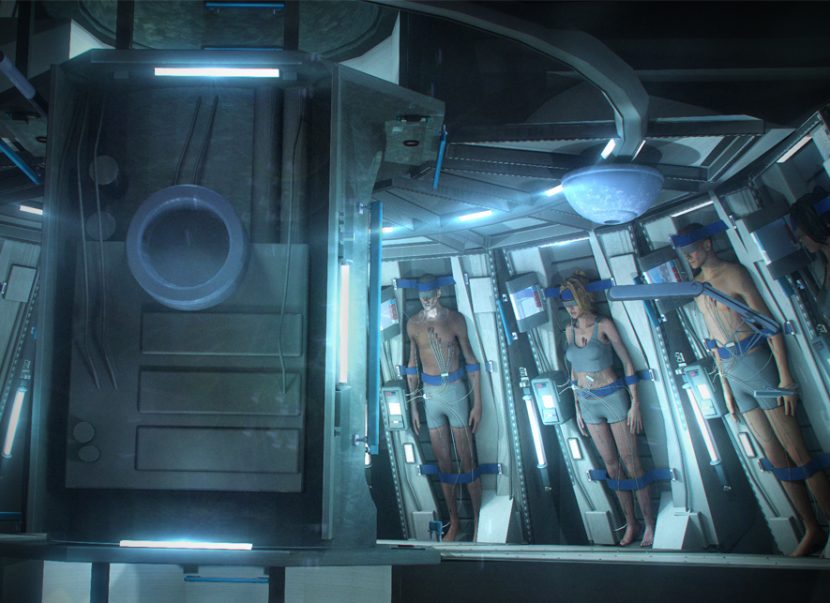
SpaceWorks es una empresa que se dedica a la ingeniería de productos superavanzados para la industria espacial: sistemas hipersónicos, cámaras de hibernación, pequeñas naves espaciales… Un poco de todo. Pero no vayamos a engañarnos: todo lo que se ve en su...
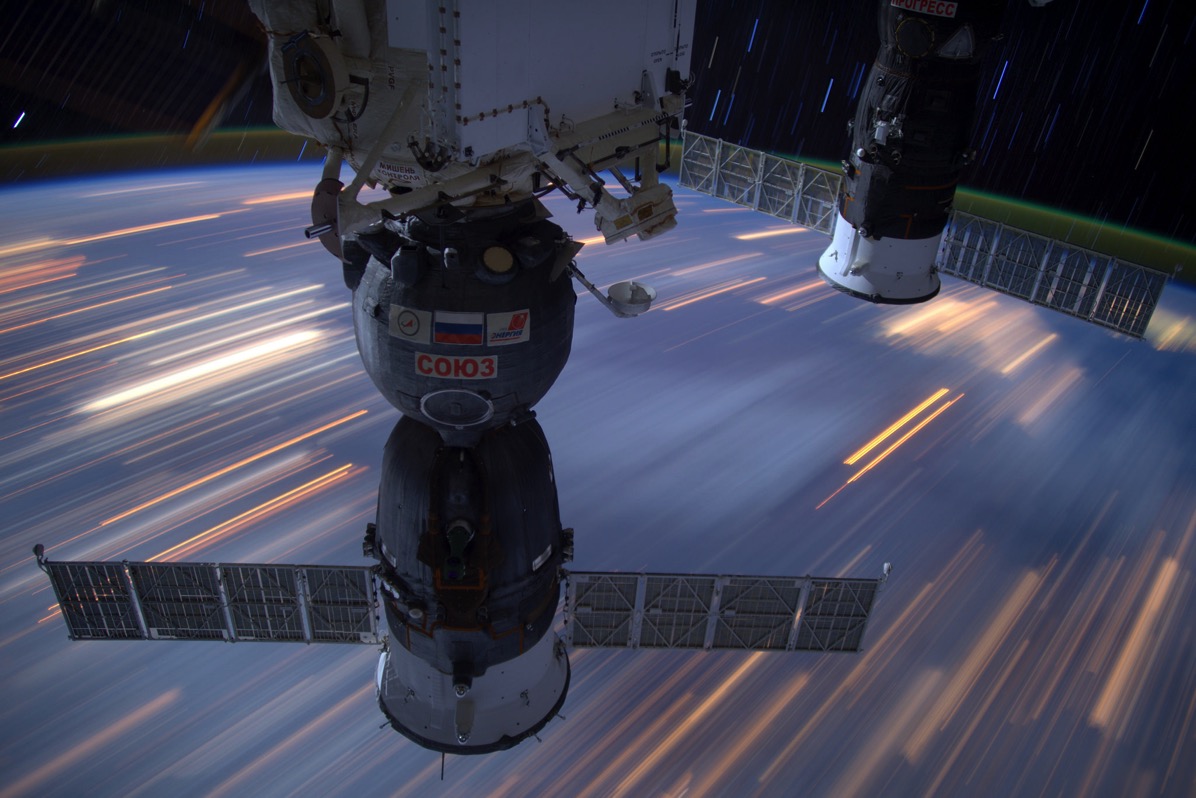
El 23 de abril de 1967 a las 00:35:00 UTC despegaba la Soyuz 1 con Vladimir Komarov como único tripulante. La misión tenía múltiples objetivos, entre ellos el de acoplarse con la Soyuz 2 e intercambiar tripulantes. Pero el lanzamiento de...

Tras una aproximación automática sin problemas después de su lanzamiento el 18 de abril los tripulantes de la Estación Espacial Internacional capturaron con el brazo robot de ésta la cápsula de carga Cygnus OA-7, bautizada como S.S. John Glenn, a las...

Un lanzamiento de libro y el uso de la trayectoria de aproximación directa a la Estación Espacial Internacional ha permitido a Fiódor Yurchijin y Jack Fischer incorporarse a la tripulación de la EEI a las 17:25 del 20 de abril de...
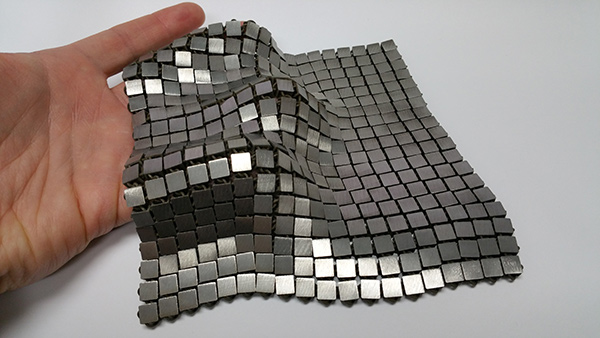
En NASA News, 'Space Fabric' Links Fashion and Engineering El tejido espacial tiene cuatro características: es reflectivo, absorbe el calor, es flexibles y es resistente. Un lado del tejido puede reflejar la luz y el calor, mientras que el lado contrario...
Por Nacho Palou -
20 ABR 2017
China ha dado otro paso adelante en su programa espacial con el lanzamiento del Tianzhou-1, el primero de sus cargueros espaciales. Ha sido el segundo lanzamiento de un cohete Larga Marcha 7. Y el tercer lanzamiento desde el nuevo espaciopuerto de...
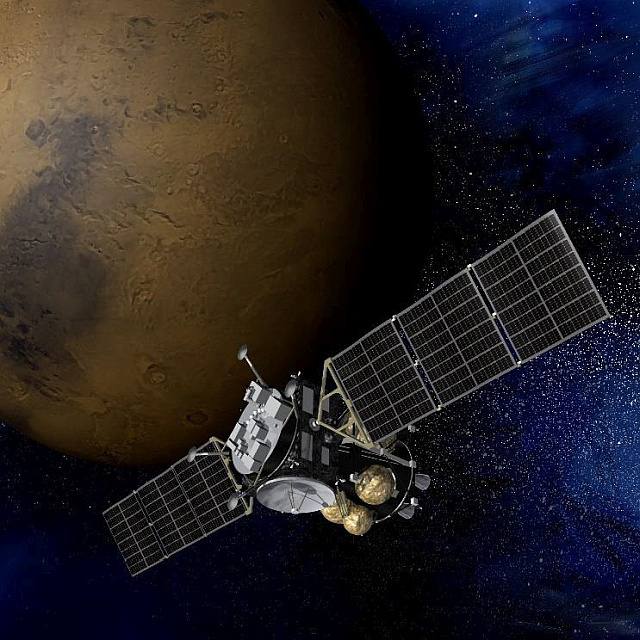
Desde hace unos días está viva la web de Martian Moons Exploration, la misión de la JAXA, la Agencia Japonesa de Exploración Aeroespacial que pretende traer a la Tierra muestras de Fobos, una de las dos lunas de Marte. Para ello...

Todo está listo en el cosmódromo de Baikonur para el lanzamiento de la cápsula tripulada Soyuz MS-04 rumbo a la Estación Espacial Internacional, previsto para las 9:13:44 del 20 de abril de 2017, hora peninsular española. El lanzamiento se podrá seguir...

Tal y como estaba previsto un cohete Atlas V despegó a las 17:11 del 18 de abril de 2017 de la plataforma de lanzamiento 41 del Centro Espacial Kennedy con la cápsula de carga Cygnus OA-7 como carga útil. 21 minutos...
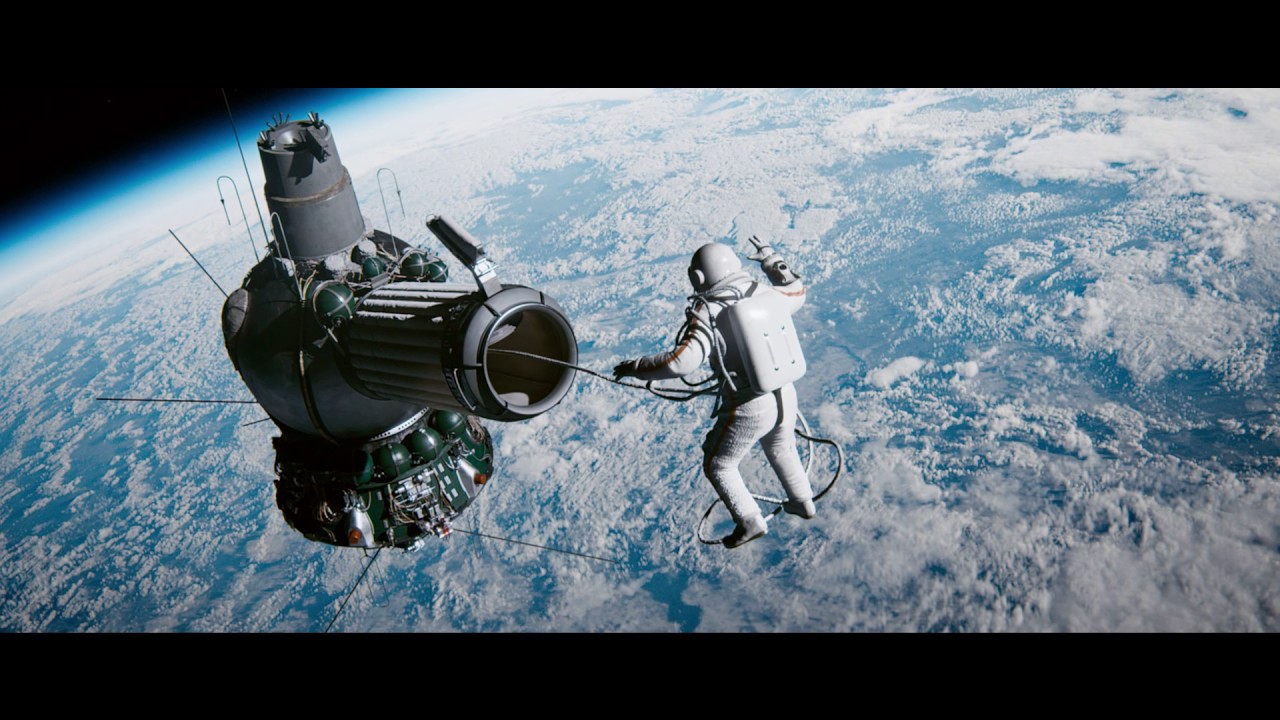
El 18 de marzo de 1965 Alekséi Leónov se convertía en el primer ser humano en dar un paseo espacial al salir de la esclusa inflable de la cápsula Vosjod 2 a las 8:34:51 UTC, aunque casi no lo cuenta. First...

Todo está listo en la plataforma de lanzamiento 41 del Centro Espacial Kennedy para el despegue de la cápsula de carga Cygnus OA-7, bautizada como S.S. John Glenn en homenaje al primer estadounidense en entrar en órbita. Un Atlas V será...

Este timelapse del traslado de un cohete chino a su plataforma de lanzamiento es bastante más impresionante que las imágenes de cohetes a las que estamos acostumbrados. Se trata de primera nave de carga china, la misión Tianzhou-1 que arrancará en...
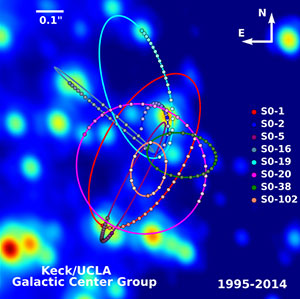
Esta animación del UCLA Galactic Center Group es toda una labor de paciencia y detalle: muestra cómo ciertas estrellas a las que se sigue la pista de forma muy precisa con varios telescopios desde hace veinte años orbitan alrededor del Centro...
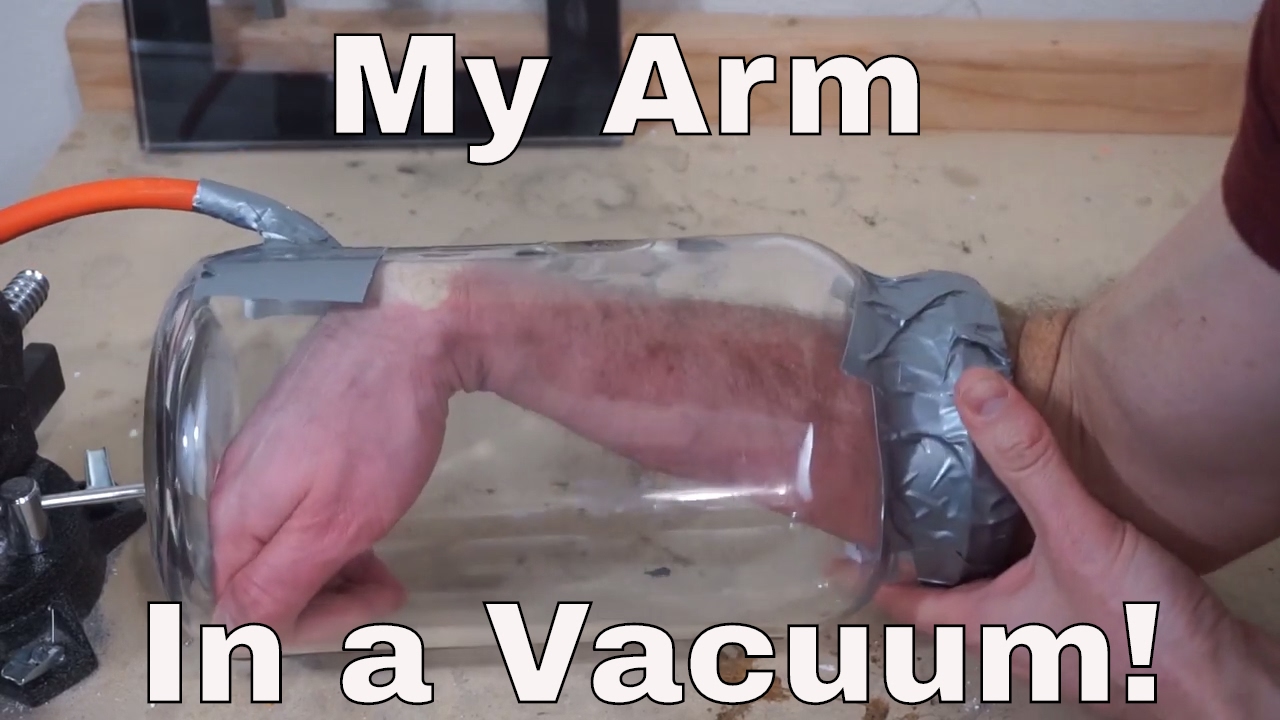
No dicen el precio –por ahora es una de esas cosas que si tienes que preguntar el precio es que no puedes permitírtelo– pero por todo lo demás este vídeo en 360º de lo que sería el lanzamiento de una cápsula...

Este Sistema Solar en un frasco contiene los ocho miniplanetas a escala 1:5.000.000.000: minimercurio, minivenus, minitierra, minimarte, minijúpiter, minisaturno, miniurano y minineptuno. A esa escala los gigantes gaseosos están reducidos al tamaño de una pelota de pin-pon y los pequeños planetas...
Por Nacho Palou -
11 ABR 2017

Ryzhikov, Borisenko y Kimbrough se despiden de sus compañeros aantes de cerrar compuertas – Thomas Pesquet Tras partir de la Estación Espacial Internacional a las 9:57 del 10 de abril de 2017, hora peninsular española, la cápsula tripulada Soyuz MS-02 aterrizaba sin...
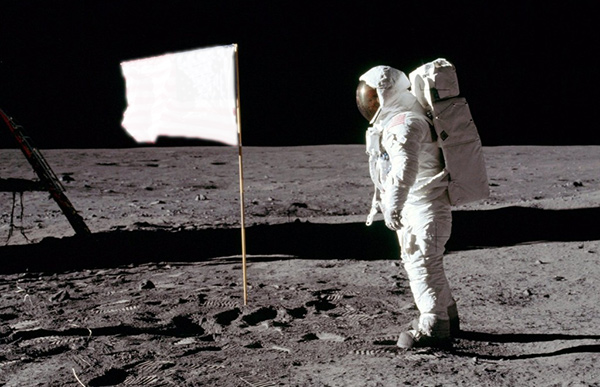
En Air & Space, (2011) Faded Flags on the Moon, A lo largo del programa Apolo, entre 1969 y 1972, los astronautas dejaron en la Luna seis banderas. Durante más de 40 años las banderas han estado expuestas al hostil entorno...
Por Nacho Palou -
10 ABR 2017

Tras sus dos estancias en la Estación Espacial Internacional en 2002 y en 2008, en las que acumuló un total de 377 días en el espacio, Peggy Whitson ya era la astronauta de la NASA que más tiempo había estado en...

Impresión artística del encuentro de la New Horizons con un objeto del cinturón de Kuiper - NASA/JHUAPL/SwRI/Alex Parker Cuando el 14 de julio de 2015 la sonda New Horizons pasó por el sistema formado por Plutón y sus lunas lo hizo zumbando...

Boeing ha dado un importante paso adelante de cara a la entrada en servicio de la nave tripulada CST-100, también conocida como Starliner, al haber encendido la aviónica de la primera de ellas. La aviónica es el conjunto de hardware y...

Uno de los sueños de infancia de Jeff Bezos, el fundador de Amazon, es volar al espacio. Eso parece una buena idea, y como tiene el dinero como para no tener que esperar a que se le pase, montó una empresa...
Los dos aterrizajes del Falcon 9 #1021 por @AtronautiCAST SpaceX ha demostrado que es técnicamente viable utilizar cohetes «usados» para hacer lanzamientos espaciales con el enorme éxito que ha supuesto el segundo lanzamiento del Falcon 9 con número de serie 1021. Este...
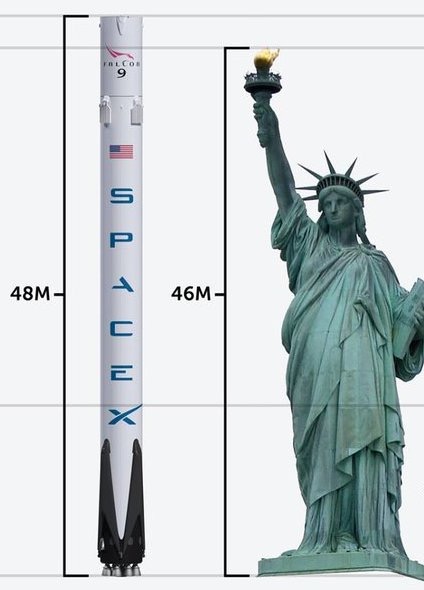
Una publicación compartida de SpaceX (@spacex) el 4 de Abr de 2017 a la(s) 7:16 PDT Nos ha llevado 15 años lograr esto. Estoy sin palabras. — Elon Musk Ahora imagina que en lugar de un cohete lo que aterriza en...
Por Nacho Palou -
5 ABR 2017

El 30 de noviembre de 2016 la sonda Cassini comenzaba la última fase de su misión, acercándose más que nunca a los anillos de Saturno. Está consiguiendo resultados espectaculares, pero a partir del 22 de abril de 2017 se acercará más...
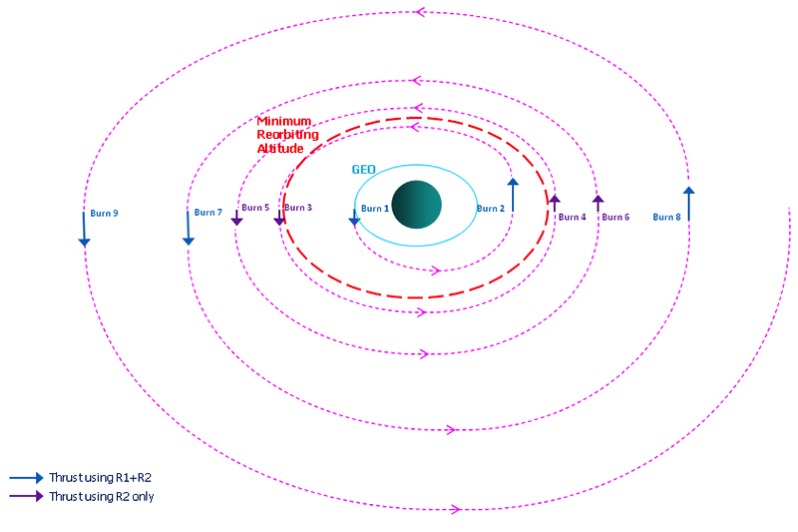
Hay algo más de 13.000 satélites en órbita alrededor de la Tierra, aunque de ellos sólo unos 3.500 siguen en activo. Y aunque el espacio es muy grande resulta que se pueden producir colisiones entre satélites porque hay órbitas concretas que son...

Como parte de los preparativos para el primer lanzamiento tripulado de una cápsula Starliner de Boeing la empresa está haciendo pruebas del Starliner Emergency Egress System, el Sistema de Salida de Emergencia del Starliner, instalado en el Complejo de Lanzamiento 41...
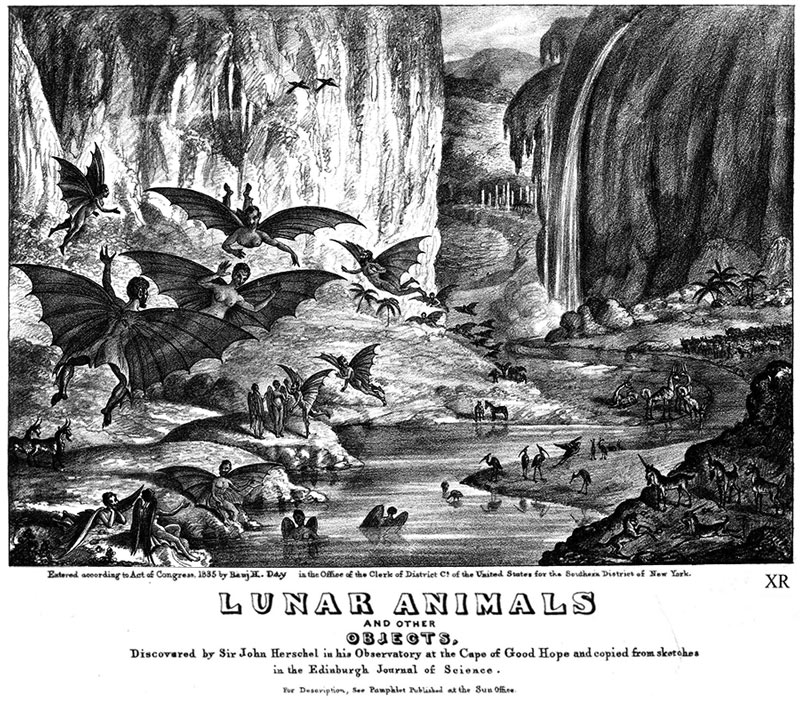
Cuán intrincados y sorprendentes podían resultar los «animales lunares y otros objetos» descritos por el diario The Sun en agosto de 1835, atribuidos al gran astrónomo británico John Herschel… quien era totalmente ajeno a este supuesto «descubrimiento». El diario británico lo...

El 24 de marzo de 2017 el astronauta de la Agencia Espacial Europea Thomas Pesquet llevó a acabo un paseo espacial de seis horas y media junto con Shane Kimbrough. Durante el paseo llevaron a cabo un montón de tareas, como...

SpaceX ha vuelto a hacer historia en la exploración espacial con el lanzamiento del satélite de telecomunicaciones SES-10. No por el lanzamiento del satélite, obviamente, algo que hoy en día es rutinario, sino por el lanzador utilizado. Era un Falcon 9...

Hace poco, por una curiosa carambola empresarial, la NASA se encontró con cuatro plazas extra en otras tantas cápsulas Soyuz con las que en principio no contaba. Esto da a la NASA la posibilidad de seguir enviando astronautas a la Estación...

Richard Garriott (a la derecha) con Greg Chamitoff y Michael Fincke en la EEI En 2008 Richard Gariott estuvo 12 días a bordo de la Estación Espacial Internacional tras pagar 30 millones de dólares por ello; en Travel Tips From a Real...
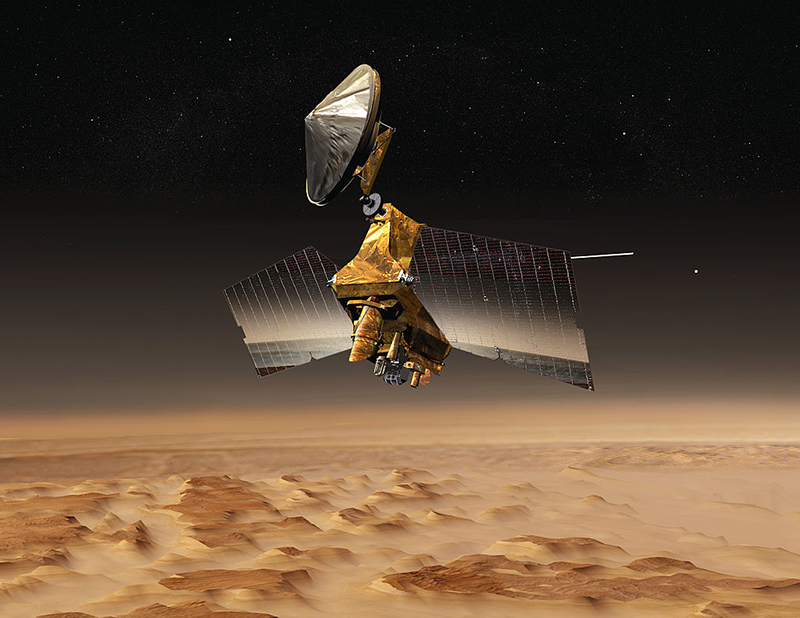
El 10 de marzo de 2006, a las 22:24:00, hora peninsular española, la sonda Mars Reconnaissance Orbiter de la NASA entraba en órbita alrededor de Marte, aunque mientras se terminaba de ajustar su órbita no comenzó a realizar observaciones hasta noviembre...
En sus casi 60 años de historia la NASA se ha hecho con una impresionante colección de imágenes, vídeos y sonidos que forman parte de nuestra historia como especie que busca salir de su planeta natal. Gracias a Internet estas imágenes...

Prueba estática del Falcon 9 que lanzará el SES-10 SpaceX sigue dando pasos para escribir un nuevo capítulo en la historia de los lanzamientos espaciales con la prueba estática del cohete Falcon 9 que lanzará el satélite de comunicaciones SES-10. No por...

Todo el mundo se hace una idea de más o menos qué es un agujero negro, pero los detalles no son tan fáciles de comprender. Por aquí hemos hablado alguna vez de que hay un montón de cosas que la gente...
Lluvias de meteoros vistas desde el espacio es una herramienta desarrollada por Ian Webster que representa visualmente cómo “se verían” desde el espacio las lluvias de meteoros más conocidas: las perseidas, leónidas, oriónidas,... o todas a la vez. Las lluvias de...
Por Nacho Palou -
27 MAR 2017

Unreal Engine es un conocido y potente motor para videojuegos que tiene su origen en el videojuego de tiros Unreal que se publicó originalmente en 1998. Pero Unreal Engine también ofrece herramientas para visualizar y recrear entornos virtuales, existente o no....
Por Nacho Palou -
27 MAR 2017
Pocos proyectos de financiación colectiva tan ambiciosos como este he visto: Die astronautin tiene como objetivo enviar a una astronauta alemana a la Estación Espacial Internacional en 2020. Es una iniciativa impulsada por Claudia Kessler que en marzo de 2016 consiguió...
Aunque las ruedas de Curiosity ya presentaban múltiples agujeros la NASA acaba de anunciar que en algún momento entre el 27 de enero y el 19 de marzo de 2017 dos de las bandas de rodadura de su rueda central izquierda...

… Y ya hemos perdido otra GoPro. Según mis cálculos ya van cuatro. Otra baja. Y esta vez ni siquiera era nuestra. Gav y Dan, los Slow Mo Guys, dedicaron una sesión en el campus de la Universidad de Purdue (Indiana)...

Stanley Von Medvey es un animador e ilustrador al que le apasionan las naves espaciales y a través de su serie Stan draws spaceships intenta explicar sin demasiadas complicaciones cómo funcionan. Por ahora lleva publicados tres vídeos, uno sobre lanzadores no...

El vídeo es bastante completo, pero para los ansiavivas que quieran abreviar el lanzamiento está en 02:20. Se trata de un cohete denominado Fathom II y se lanzó desde el Spaceport America. Es el fruto del trabajo de un grupo de...

Marte tuvo una vez anillos y es probable que vuelva a tenerlos en el futuro. Eso dice una teoría presentada por investigadores de la Purdue University descrita en un estudio publicado en la revista Nature Geoscience. El artículo sugiere que las...
Por Nacho Palou -
22 MAR 2017

Han transcurrido unos 13.700 millones de años, pero parece que fue ayer cuando el Bing Bang dio comienzo a todo – literalmente. Ha sido todo un viaje que resume Desde el Big Bang a la humanidad: La formación del universo comienza...
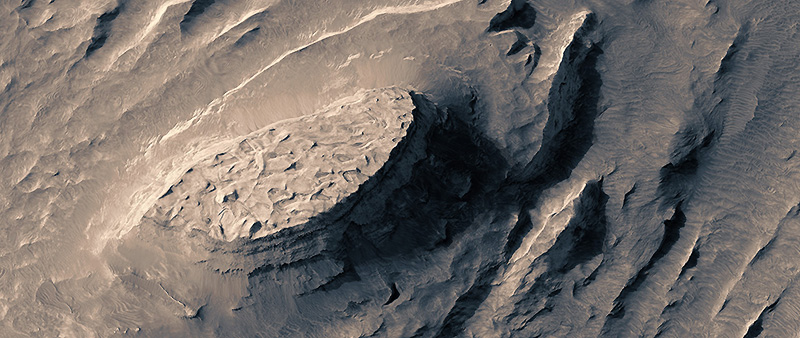
Jan Fröjdman ha generado este vídeo de la superficie de Marte utilizando cientos de fotografías tomadas por la cámara HiRISE instalada a bordo de la sonda Mars Reconnaissance Orbiter de la NASA. No se trata de una mera secuencia de fotografías,...
Por Nacho Palou -
21 MAR 2017
El Falcon 9 que lanzó la Dragon 8 antes de despegar – SpaceX Si no hay más retrasos SpaceX hará una prueba estática del cohete Falcon 9 que va a lanzar el satélite de telecomunicaciones SES-10 el próximo 26 de marzo. Si...
SpaceX, la compañía espacial de Elon Musk, ha solicitado oficialmente a la FCC permiso para lanzar 11.943 satélites de órbita baja con idea de crear una gigantesca red que rodee nuestro planeta y proporcione comunicaciones de banda ancha en cualquier lugar...

En la charla Ted titulada Adventures of an asteroid hunter, Carrie Nugent (en inglés, subtitulado) dedica unos entretenidos minutos a hablar sobre su trabajo como cazadora de asteroides. De la importancia que juegan los asteroides en el desarrollo de la Tierra...
Por Nacho Palou -
20 MAR 2017
La Dragon 10 instantes antes del amerizaje – SpaceX Un suave amerizaje frente a unos 400 kilómetros al oeste de la costa de California a las 15:46 del 19 de marzo de 2017, hora peninsular de España, ponía fin a la misión...
Buzz Aldrin quiere ser recordado por algo más que por ser “el segundo hombre que pisó la luna”. Así que lleva un tiempo desarrollado un plan para colonizar Marte y establecer allí un asentamiento humano permanente. Sí, eso que no se...
Por Nacho Palou -
18 MAR 2017
Imagen NDVI de la isla de Noirmoultier Ojo, espaciotrastornados, gente a quienes os gusten los mapas, o a los que os encante curiosear por Google Maps o Google Earth… El programa Copérnico de la Agencia Espacial Europea (ESA) y la Unión Europea...

Brindisi en el visible Apenas había pasado una semana de su lanzamiento cuando el satélite medioambiental Sentinel-2B de la Agencia Espacial Europea estaba ya capturando sus primeras imágenes y enviándolas a tierra, aunque le quedan aún unos tres meses de pruebas antes...

Si tienes la ciudadanía rusa, menos de 35 años, y, a poder ser, experiencia en el mundo de la aviación, en cohetes, o en la industria espacial, puedes presentarte como candidato al proceso de selección de cosmonautas que acaba de lanzar...
Concepto de estación lunar por Lockheed Martin Con el fin de la Estación Espacial Internacional previsto para 2024 –aunque habrá que ver si le vuelven a dar una prórroga– los países que participan en ella están dando los últimos toques del diseño...
El pasado 1 de marzo de 2017 Zero 2 Infinity llevaba a cabo el primer lanzamiento de uno de sus cohetes Bloostar desde 25 kilómetros de altitud sobre el golfo de Cádiz, aunque el control de la misión estaba en las...

En Everything About Mars Is The Worst, A simple vista Marte parece bonito. El sol calienta su superficie oxidada a unos agradables 20 grados durante el día y la brisa mueve suavemente las partículas de polvo. Las naves espaciales aterrizan y...
Por Nacho Palou -
13 MAR 2017

Aunque todavía no han sido procesadas están ya haciendo las rondas una serie de imágenes de Pan, una de las lunas de Saturno, tomadas por la sonda Cassini el 7 de marzo de 2017. Unas imágenes tan alucinantes que hasta Carolyn...
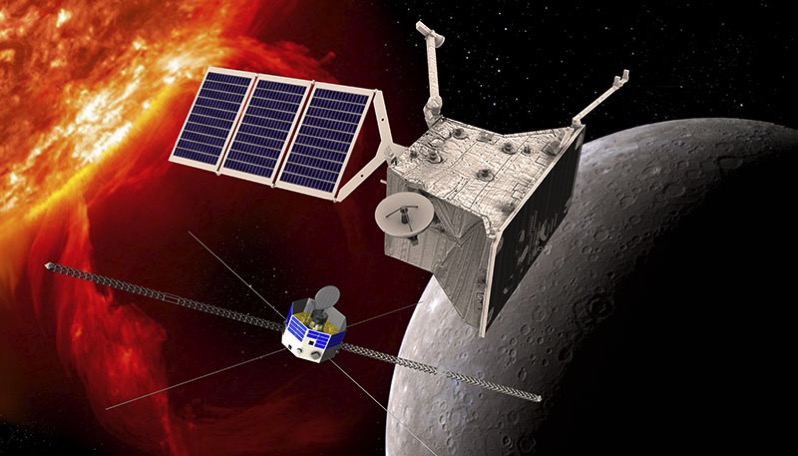
Esta foto recoge la primera vez que se despliega el panel solar de 7,5 metros del Mercury Planetary Orbiter de la ESA una vez fijado al orbitador. En abril se volverá a repetir la prueba una vez que el MPO haya...
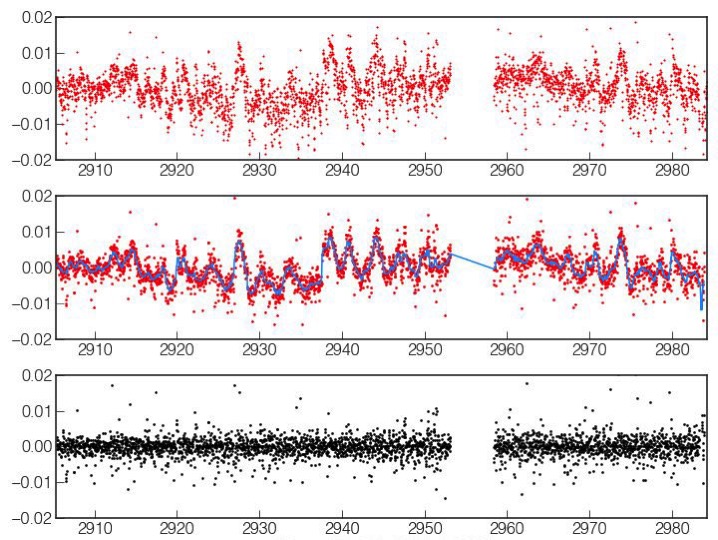
La NASA acaba de hacer públicos los datos que ha obtenido su telescopio espacial Kepler de la estrella Trappist-1 entre el 15 de diciembre de 2016 y el 4 de marzo de 2017, aunque con un hueco de cinco días causado...

Además de estrenar este vídeo Jeff Bezos ha proporcionados datos acerca de las prestaciones del New Glenn, el cohete con capacidad de realizar lanzamientos orbitales que está desarrollando Blue Origin, su empresa espacial. Habrá dos versiones del New Glenn, una de...
Impresión artística* de la Europa Clipper en su configuración de principios de 2017 – NASA/JPL-Caltech El que durante muchos años fue el nombre extraoficial de la misión que la NASA está diseñando para explorar Europa –la luna de Júpiter, no el continente–...

Un lanzamiento perfecto por parte de un cohete Vega de la Agencia Espacial Europea ponía esta pasada noche en órbita el satélite medioambiental Sentinel-2B, que está en comunicación con el control de la misión y con su panel solar desplegado. Esto...
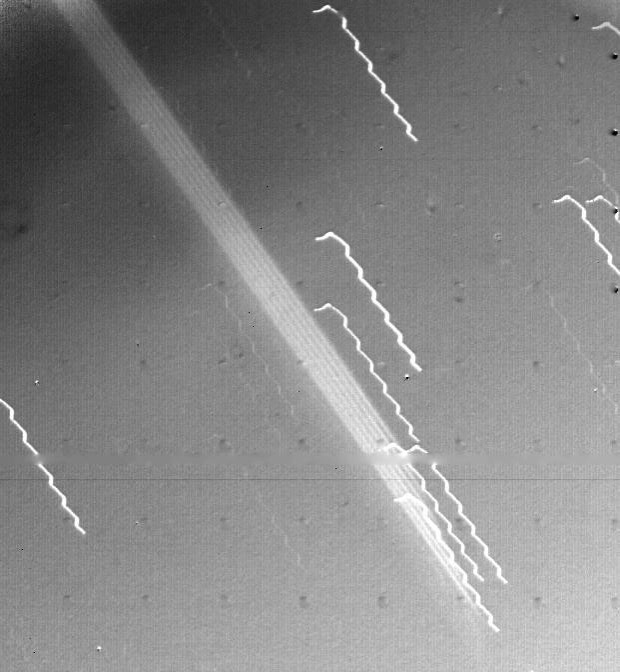
Sabemos que Saturno tiene anillos desde que en en 1659 Christiaan Huygens los identificara como tales –Galileo los había observado en 1610 pero la baja potencia de su telescopio no le había permitido dilucidar lo que eran–. William Herschel observó los anillos...
Todo está listo en el espaciopuerto de Kourou en la Guayana Francesa para el lanzamiento del satélite medioambiental Sentinel-2B, previsto para las 2:49:24 del 7 de marzo de 2017, hora peninsular de España, a bordo de un cohete Vega. El lanzamiento...
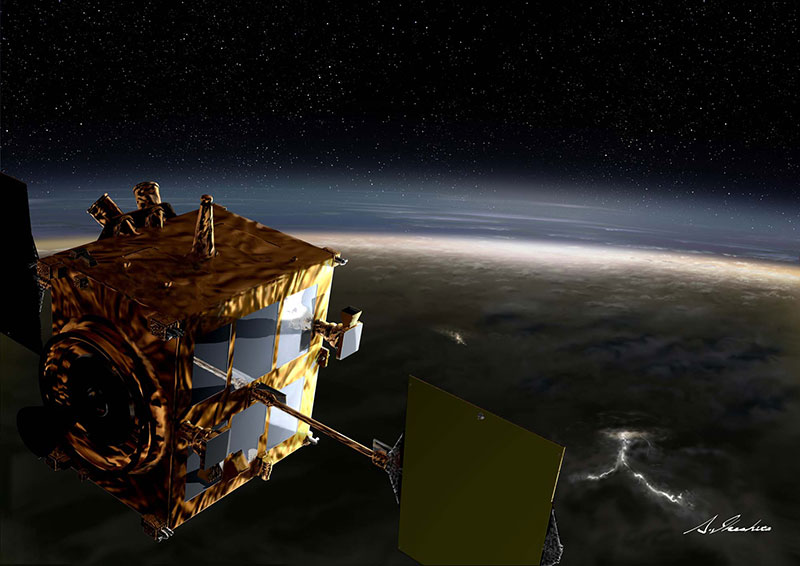
Impresión artística de Akatsuki en órbit alrededor de Venus Según cuenta la Agencia Japonesa de Exploración Aeroespacial en Two cameras on Akatsuki pause observations las cámaras de infrarrojos de 1 y 2 micrómetros de la sonda Akatsuki, que está en órbita alrededor...

Los lanzamientos a la Luna usarían una nave bautizada como Blue Moon basada en el New Separd Apenas unos días después de que SpaceX anunciara que está dispuesta a enviar una misión tripulada alrededor de la Luna en 2018 se ha «filtrado»...

Mientras la cápsula tripulada Orion que está fabricando no tiene visos de volar tripulada antes de 2022 o 2023 –a pesar de que se rumorea un posible adelanto de su primer lanzamiento tripulado a 2019– y dado que tanto la Crew...
En What I Discovered After My Year In Space el astronauta de la NASA Scott Kelly, quien pasó un año consecutivo en el espacio, comparte algunas lecciones estelares a modo de prefacio de su libro Endurance: A Year in Space, A Lifetime...
Por Nacho Palou -
3 MAR 2017

Lanzamiento de la Progress MS-05 – Roscosmos Tras un lanzamiento perfecto a las 6:58 del 22 de febrero de 2017, hora peninsular de España, la cápsula de carga Progress MS-05 atracaba de forma automática sin problemas en el módulo Pirs de la...

Según se puede leer (y ver) en LEGO Ideas Second 2016 Review Results la propuesta de 20tauri bautizada como Women of NASA ha sido escogida por nuestro fabricante de ladrillos preferido para convertirlo en un producto «de verdad». Incluye a Margaret...
Todos perdemos cosas sin salir de casa. Yo mismo hace años que no veo mi Lubitel 166B. Y cuanto más tiempo llevas viviendo en un sitio, más probable es que pierdas algo. En la Estación Espacial Internacional, permanentemente habitada desde el...
Impresión artística de una Crew Dragon en el espacio Según se puede leer en SpaceX to Send Privately Crewed Dragon Spacecraft Beyond the Moon Next Year dos personas cuya identidad aún no se conoce le han pagado un montón de dinero como...

El vídeo corresponde a la primera prueba del este año del motor RS-25 del SLS (Space Launch System) de la NASA en las instalaciones cerca de la bahía de St. Louis, Mississippi. El motor se mantuvo encendido durante algo más de...
Por Nacho Palou -
23 FEB 2017
Impresión artística de una cápsula Orión en órbita Una de las cosas que pasa con cada cambio de presidente en los Estados Unidos es que la NASA recibe un nuevo conjunto de directivas no necesariamente compatibles con las anteriores –y menos si...

Juno con su motor en primer plano El 5 de julio de 2016 la sonda Juno de la NASA entraba en órbita alrededor de Júpiter. La idea era que describiera dos órbitas de captura, con una altitud mínima de 4150 kilómetros sobre...
Este fin de semana Lego ha mostrado la nueva lanzadera espacial que estará disponible este verano por unos 30 euros. Se trata de una construcción de 285 piezas que además de la lanzadera permite construir, con las mismas piezas, una base...
Por Nacho Palou -
20 FEB 2017

Lanzamiento de la Dragon CRS-10 desde la plataforma 39A del Centro Espacial Kennedy Un cohete Falcon 9 FT de SpaceX despegaba a las 15:38 del 19 de febrero de 2017 con la cápsula de carga Dragon CRS-10 rumbo a la Estación Espacial...

Este vídeo es probablemente uno de los más bonitos de la era espacial reciente: se trata de un la primera etapa del cohete Falcon 9 de Space X aterrizando en vertical sobre la plataforma fija (esta vez no es una plataforma...
Por Nacho Palou -
20 FEB 2017

He aquí una recreación «realista» (ejem) de cuánto combustible consume un cohete Saturno V durante su despegue, expresado en una unidad fácil de asimilar como es el volumen de un elefante. Pero ojo cuidao: los cálculos están mal, porque según el...

El vídeo capta diversos impactos de meteoritos contra la superficie de la Luna “y otros eventos” detectados desde el Automated Lunar and Meteor Observatory (Alamo). El Alamo emplea telescopios terrestres para observar zonas parciales del satélite con el fin de “determinar...
Por Nacho Palou -
15 FEB 2017

“Man on the Moon” (1967)Norman Rockwell / NASA En How We Get To Next, The Improbable, Bold History of Space Concept Art. En 1966 [el dibujante e ilustrador] Norman Rockwell necesitaba un traje espacial, pero la NASA no quería dejarle uno. La...
Por Nacho Palou -
15 FEB 2017

La ISRO, la organización India para la investigación espacial, colocó ayer 104 satélites en órbita en un único lanzamiento, rompiendo el récord anterior que ostentaba Rusia desde 2014 cuando puso en órbita 37 satélite de golpe. El lanzamiento, llevado a cabo...
Por Nacho Palou -
15 FEB 2017
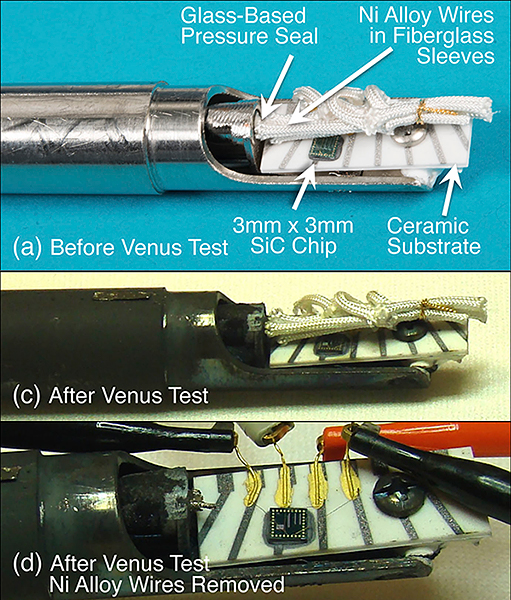
En Cnet, NASA's new electronics can survive the heat of Venus, Decir que Venus es un planeta inhóspito es quedarse corto. El planeta resulta difícil de estudiar principalmente debido a la temperatura de su superficie, de 462° de promedio, y a...
Por Nacho Palou -
9 FEB 2017
Aparte de muchos meses de datos acerca del cometa 67P-Churyumov/Gerasimenko que los científicos aún pasarán años analizando la misión Rosetta de la Agencia Espacial Europea es una de las que más interés ha despertado entre el público en los últimos años. Su...

SocialSpace de 2013 en el DLR: espaciotrastornados, personal de la ESA, astronautas… Una de las mejores cosas que han hecho en los últimos años agencias espaciales como la ESA, la NASA o Roscosmos es permitir el acceso a sus instalaciones a usuarios...

Este vídeo es una introducción a los programas de observación de la Tierra de la Agencia Espacial Europea pero se aplica a todos aquellos satélites artificiales que monitorizan nuestro planeta, sean de la agencia que sean. Nos permiten obtener datos acerca...
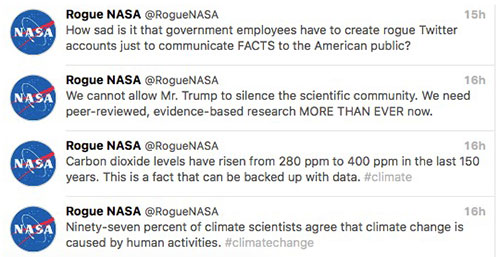
Son tiempos difíciles para la rebelión…– Star Wars, episodio V Un grupo de empleados descontentos de la NASA han creado RogueNASA, una cuenta no-oficial de carácter rebelde en el que irán publicando datos y hechos científicos sin tener que pasar por...

El vídeo de A Colorful ‘Landing’ on Pluto, de NASA, está formado por más de 100 imágenes tomadas por la sonda New Horizons a lo largas de la seis semanas que estuvo sobrevolando el planeta enano allá por el verano de...
Por Nacho Palou -
21 ENE 2017

¿Hay alguien ahí fuera? Este vídeo de Wendover repasa algunas de las cuestiones relativas a lo que se suele conocer como primer contacto con una civilización extraterrestre. Cubre muchas áreas y lo interesante es que plantea más preguntas de las que...

Frank Kovac decidió construirse un planetario a base de perseverancia e ingenuidad:, de modo que pasó 10 años fabricando una cúpula y pintando 5.000 estrellas en ella con pintura fosforescente («¡brilla en la oscuridad!»)– además de un ingenioso mecanismo para que...

El Vehicle Assembly Building (Edificio de Ensamblaje de Vehículos, VAB) de la NASA, localizado en el Centro Espacial Kennedy, en Florida, fue construido en los años de 1960 para el ensamblado de los cohetes Saturno V, del Programa Apolo. Mide 160...
Por Nacho Palou -
17 ENE 2017

El 16 de enero de 2017 moría Eugene Andrew Cernan, que como comandante de la misión Apolo 17 fue el último hombre en pisar la Luna el 14 de diciembre de 1972; junto con Jim Lovell y John Young, fue una de...

En Phys.org, A universe of 2 trillion galaxies, Un equipo internacional de astrónomos dirigidos por Christopher Conselice, profesor de astrofísica en la universidad de Nottingham, calcula que el universo contiene al menos 2 billones (2.000.000.000.000) de galaxias, diez veces más de...
Por Nacho Palou -
16 ENE 2017

Un Falcon 9 FT de SpaceX despegaba a las 18:54 del 14 de enero de 2017, hora peninsular española, para poner en órbita diez satélites de comunicaciones Iridium-NEXT. El cohete funcionó a la perfección, dejando los diez satélites en la órbita...
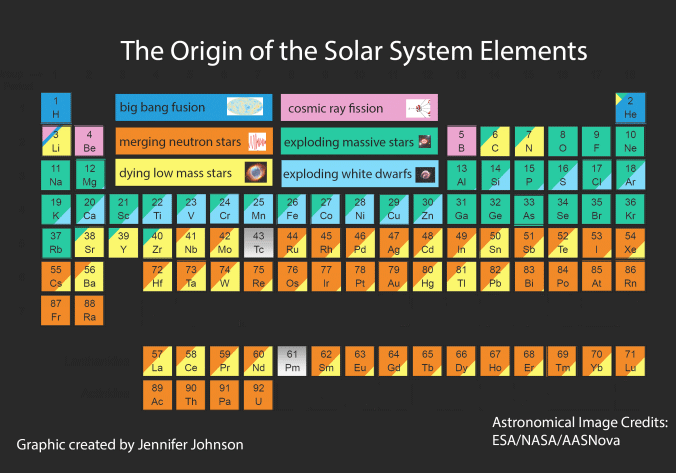
En el blog del SDSS, un proyecto de investigación de la NASA, han publicado esta tabla de los elementos según su origen que actualiza otras similares de 2008 y 2013. Esta versión permite conocer de un vistazo la procedencia de cada...

Se trata del lanzamiento de septiembre del Osiris-Rex rumbo al asteroide Bennu. Ahora la NASA ha publicado el vídeo esférico HD a 1440p, que permite «revivir» el lanzamiento a pocos metros de la plataforma de lanzamiento. (Si tu ordenador es lo...

La carga más inusual que llevó el carguero espacial japonés Kounotori 6 a la Estación Espacial Internacional fueron seis baterías de iones de litio. Están destinadas a sustituir a las de níquel–hidrógeno actualmente en uso que ya llevan en funcionamiento más...

Para despedir este 2016 que tantos disgustos nos ha traído, un relajante vídeo en el que el astronauta Jeff Williams, que en la actualidad tiene el récord de permanencia en el espacio de la NASA, reflexiona sobre la fragilidad de nuestro...
Juno con su motor en primer plano El pasado 11 de diciembre la sonda Juno de la NASA pasaba por su tercer perijove, la parte más cercana a Júpiter de su órbita, en el que llegó a acercarse a un mínimo de...

La Astrograph de Caran d’Ache y MB&F es una pluma diseñada para recordar a un cohete espacial. Se trata de una edición limitada a 99 unidades en relación a las 99 piezas unidas a mano que forman cada una de las...
Por Nacho Palou -
26 DIC 2016
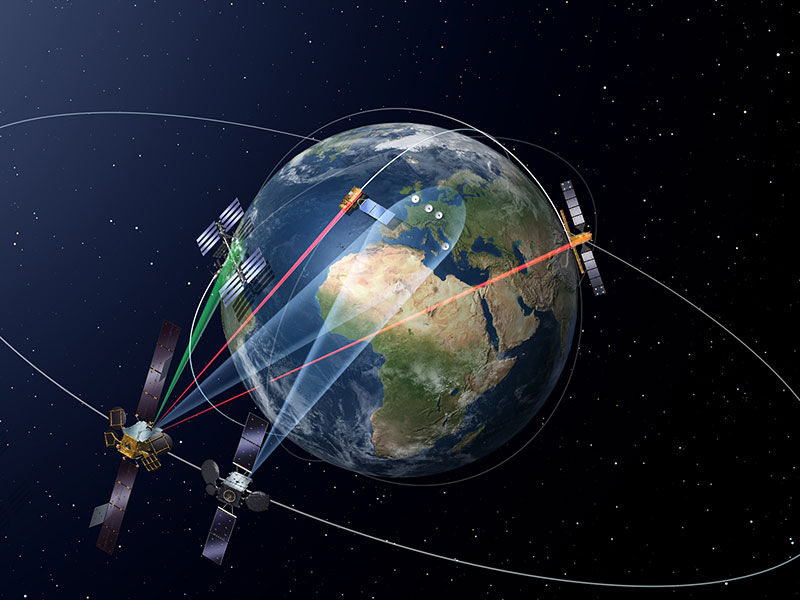
Tanto la Agencia Espacial Europea como la NASA tienen montones de satélites en órbita terrestre, además de la Estación Espacial Internacional, que cada día generan cantidades ingentes de datos que hay que transmitir a tierra para su almacenamiento y posterior procesamiento....
Terminada el pasado 30 de septiembre de 2016 con el descenso de la sonda Rosetta sobre la superficie del cometa 67P/Churyumov-Gerasimenko, en la que reposaba el aterrizador Philae desde el 12 de noviembre de 2014, la misión Rosetta de la Agencia...

Ya sabemos de dos planetas que están habitados: la Tierra por humanos, y Marte que está habitada por robots. El proyecto FT-Utah financiado por la agencia espacial alemana está probando estos robots desarrollados por el Centro de innovación robótica y de...
Por Nacho Palou -
19 DIC 2016

Leland Melvin, astronauta de la NASA, ya nos contó hace tiempo las cosas curiosas que el espacio le hace a tu cuerpo. Ahora vuelve en una vídeo-entrevista con la gente de Great Big Story para explicar ocho historias «increíbles» de la...
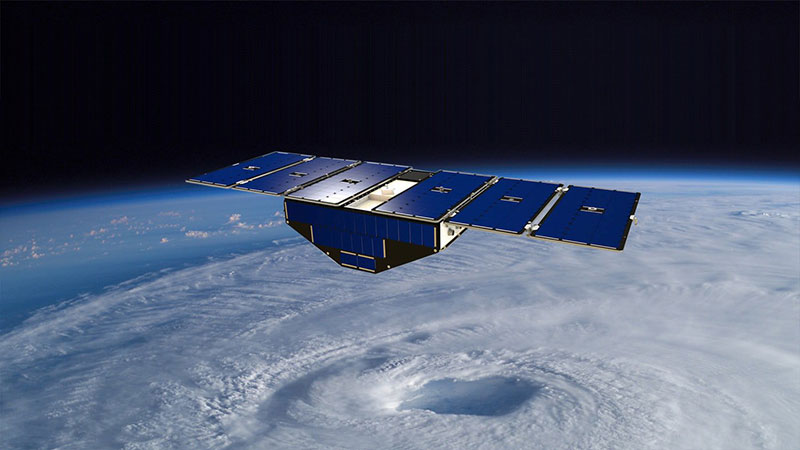
Un cohete Pegasus XL, lanzado desde el Stargazer de Orbital ATK, puso en órbita los ocho satélites de la misión Cygnss de la NASA el 16 de diciembre de 2016. El Cyclone Global Navigation Satellite System, o Sistema Satélite de Navegación...

Los cohetes Pegasus empezaron a usarse en los años de 1990, y se caracterizan porque "despegan" desde unos 12.000 metros de altitud llevados por un avión. Una vez que el avión de transporte llega hasta el lugar desde donde se desea...
Por Nacho Palou -
16 DIC 2016
Con 18 satélites ya en órbita –aunque los cuatro más recientes aún están en su fase de puesta en marcha– la Comisión Europea ha procedido a la puesta en marcha inicial del sistema de posicionamiento Galileo. El sistema completo constará de...

Kounotori 6 a la espera de ser capturado - Thomas Pesquet/ESA La cápsula de carga Kounotori 6, con sus 3,9 de carga en el módulo presurizado formada por comida y bebida –fundamentalmente agua– y ropa, productos para la higiene, material para instrumentos,...
El pasado mes de agosto la NASA realizó diversas pruebas de encendido de un motor de cohete fabricado “casi” en su totalidad por impresión 3D, una técnica que la NASA lleva años desarrollando con el fin de reducir el coste de...
Por Nacho Palou -
12 DIC 2016

Antes del lanzamiento – Jaxa Un cohete H-IIB lanzaba a las 14:26 del 9 de diciembre de 2016, hora peninsular española, la nave de carga HTV-6 rumbo a la Estación Espacial Internacional, que de acuerdo con la costumbre de la JAXA, la...

Si puedo inspirar a los jóvenes para que se comprometan con el bien de la humanidad, ya habré conseguido algo.– John Glenn Tras unas semanas hospitalizado el 8 de diciembre de 2016 moría a los 95 años John Glenn, el último de...
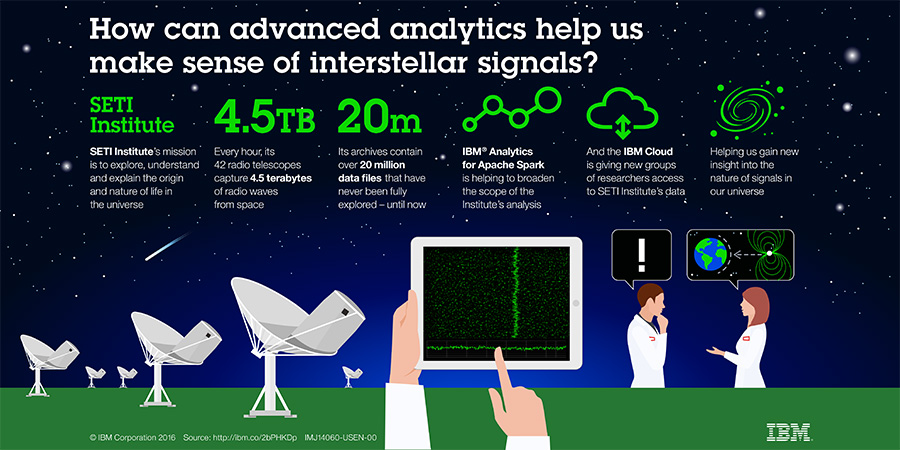
IBM ha publicado un pequeño estudio de caso titulado SETI Institute: expanding the parameters of the search for extra-terrestrial intelligence with advanced analytics en el que explica la tecnología de la marca que se está utilizando para actualizar el trabajo del...

Mattingly (y sus anillos), Young y Duke. Fotografía: NASA. Nunca había oido esta historia del astronauta Ken Mattingly que se recoge en Ring Around the Lunar Orbit y que también cuenta Charlie Duke en esta charla grabada hace unos años. Ken Mattingly...
Por Nacho Palou -
6 DIC 2016

El sábado 3 de diciembre de 2016, algo más de dos años después del accidente en el que resultó destruída su predecesora, la VSS Unity realizó su primer vuelo libre. Tal y como se puede leer en Successful First Glide Flight...

Se confirma la pérdida de la cápsula de carga Progress MS-04, con la que se perdía el contacto minutos después de su lanzamiento hacia la Estación Espacial Internacional con 2.442 de suministros a bordo. Aunque en principio había informaciones que aseguraban...

La Progress MS-04 y su cohete – Roscosmos Tal y como estaba previsto un cohete Soyuz U despegaba a las 14:51:52, hora peninsular española, del 1 de diciembre de 2016 con la cápsula de carga Progress MS-04 como carga útil. Con 2.442...

La CNN dedica el artículo War in space: Kamikazes, kidnapper satellites and lasers a diversas sospechas existentes relativos a la utilidad o finalidad de algunos satélites y objetos en órbita terrestre que, según sus autores, podrían tener relación con la guerra...
Por Nacho Palou -
30 NOV 2016
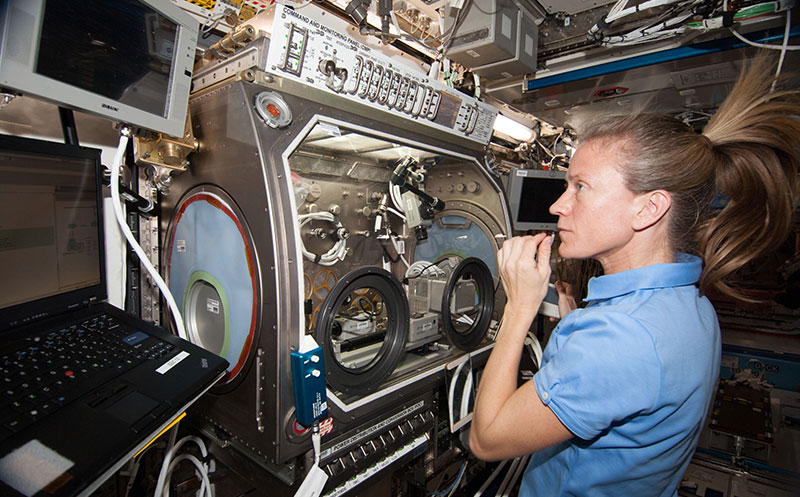
La astronauta Karen Nyberg experimentando con la Microgravity Science Glovebox. Foto: NASA Robert Frost, ingeniero y controlador de vuelo de la NASA, respondió a esta pregunta al alimón entre Quora y Forbes. Y es que si se piensa un poco, ciertamente no...

La cápsula Alina junto con el rover lunar (derecha) del equipo PTScientists / Audi. La competición Google Lunar X Prize anima a los equipos participantes, 16 en la actualidad, a desarrollar y llevar a cabo una misión con destino la luna («un...
Por Nacho Palou -
30 NOV 2016

En órbita alrededor de Saturno desde el 1 de julio de 2004 la sonda Cassini comienza hoy, 30 de noviembre de 2016, la última fase de su misión. Cumplidos con creces los objetivos de la misión la programación de estas órbitas...
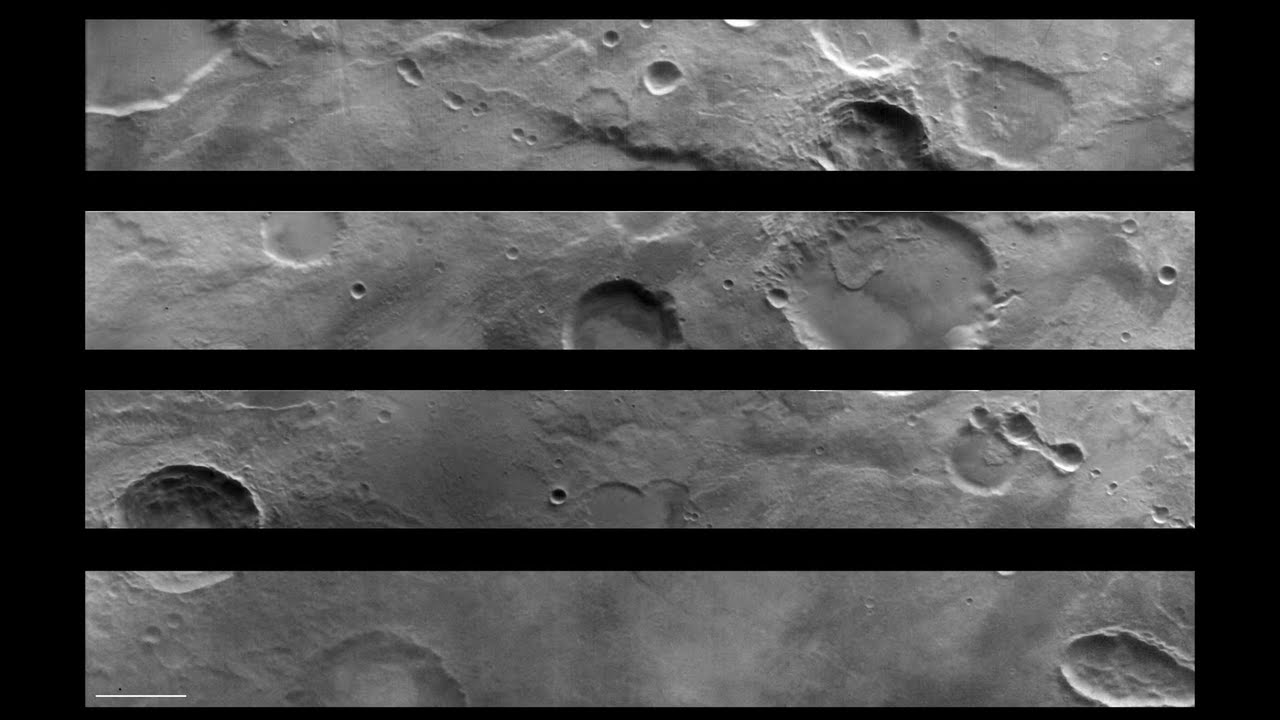
Aunque el aterrizador Schiaparelli no lo consiguió el orbitador de la misión ExoMars 2016 de la Agencia Espacial Europea no tuvo mayor problema en colocarse en órbita alrededor de Marte el pasado 19 de octubre de 2016. Desde entonces los responsables...

Básicamente. En Bloomberg, 106-Year-Old Fishing Net Maker May Have Space Junk Solution, Un fabricante japonés que lleva 106 años haciendo redes de pescar podría tener la solución al problema de la basura espacial. Nitto Seimo Co. ya está trabajando con la...
Por Nacho Palou -
29 NOV 2016

Kate Rubins en el interior de BEAM – NASA BEAM, el Bigelow Expandable Activity Module o Módulo de Actividad Expandible Bigelow, es un módulo hinchable que lleva instalado e hinchado en la Estación Espacial Internacional desde finales de mayo de 2016. Expansión...

La Rick Husband a su partida de la EEI – NASA Después de 29 días atracada en la Estación Espacial Internacional, a la que llevó 2209 kilos de carga útil, la cápsula de carga Cygnus OA-5 «Rick Husband» partía de ésta a...
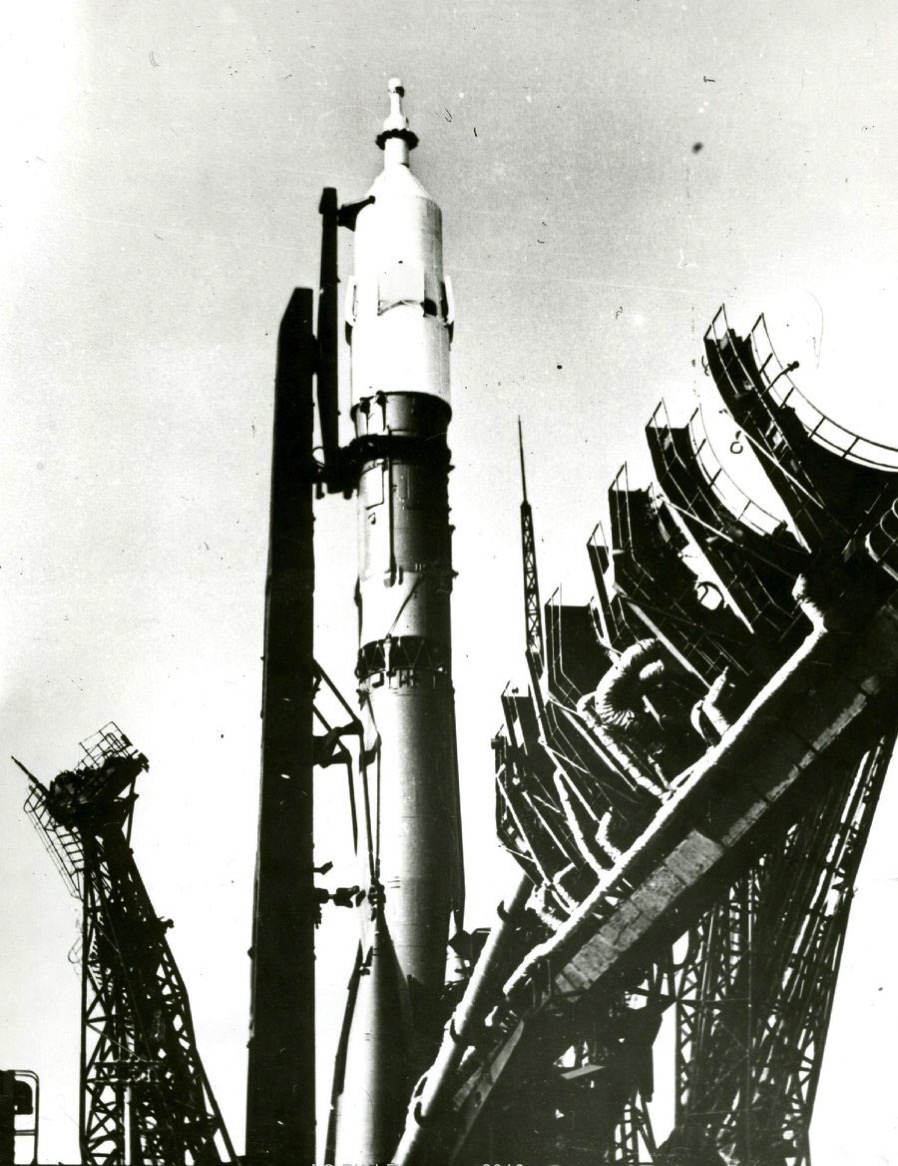
El primer Soyuz en la plataforma de lanzamiento – Roscosmos El 28 de noviembre de 1966 a las 11:02:00 UTC despegaba de la zona 31 del cosmódromo de Baikonur el primer cohete Soyuz de la historia. Llevaba a bordo la primera cápsula...
Restos de Schiaparelli en detalle – NASA/JPL-Caltech/University of Arizona Hace semanas que se rumoreaba, pero por fin la Agencia Espacial Europea ha confirmado que todo apunta a un problema con los sensores de las unidades de medición inercial de a bordo como...

La llegada del astronauta de Thomas Pesquet a la Estación Espacial Internacional el día 19 de noviembre de 2016 a bordo de la Soyuz MS–03 marcaba el principio de la misión Proxima de la Agencia Espacial Europea. Con una duración prevista de...

La Shenzhou-11 en tierra – Xinhua Con el aterrizaje de la cápsula tripulada Shenzhou-11 a las 6:59 del 18 de noviembre de 2016, hora peninsular española, China ponía fin con éxito a su misión espacial tripulada más larga, aunque el aterrizaje se...

Foto de larga exposición del despegue de la Soyuz MS-03 - NASA/Bill Ingalls Un lanzamiento perfecto a las 21:20:13 del 17 de noviembre de 2016, hora peninsular española, marcó el principio del viaje de la cápsula tripulada Soyuz MS-03, que apenas 8...

Lanzamiento de los satélites Galileo 15 al 18 – ESA / Stephane Corvaja Los satélites 15 al 18 del sistema de navegación europeo Galileo, bautizados como Antonianna, Lisa, Kimberley y Tijmen, despegaban a las 14:06:48 del 17 de noviembre de 2016, hora...

En Kickstarter la campaña de Project Blue busca reunir un millón de dólares (en una primera fase) para construir y lanzar al espacio un telescopio que capaz de fotografiar otros planetas similares a la tierra, Se calcula que en el universo...
Por Nacho Palou -
17 NOV 2016

Todo está preparado en el cosmódromo de Baikonur para el lanzamiento de la cápsula tripulada Soyuz MS-03 rumbo a la Estación Espacial Internacional. Está programado para las 21:17 del 17 de noviembre de 2016, hora peninsular española, y se podrá seguir...

Todo está listo en el espaciopuerto de Kourou en la Guayana Francesa para el lanzamiento de Antonianna, Lisa, Kimberley y Tijmen, los satélites 15, 16, 17 y 18 del sistema de navegación europeo Galileo a bordo de un cohete Ariane 5....

En 2013 Tim Dood fue el único pujador en la subasta de un traje de astronauta ruso — un traje de vuelo a gran altitud, para ser más exactos, Cuando llegó el traje dentro de su enorme caja lo primero que...
Por Nacho Palou -
16 NOV 2016

El 12 de noviembre de 1966 James Lovell y Buzz Aldrin despegaban en la misión Gemini 12. La misión, de tres días, incluyó el acople con un Agena y tres paseos espaciales a cargo de Buzz Aldrin. Él dice que una...

Colgante diseñado por Cristina Romero para The Rosetta Legacy Poco antes del fin de la misión Rosetta la Agencia Espacial Europea lanzó una iniciativa llamada The Rosetta Legacy, El legado de Rosetta, en el que quería recoger testimonios acerca de pensamientos, sentimientos...

En un movimiento que seguro que atraerá a inversores de todo el mundo la empresa Mars One, esa empresa que dice que va a enviar a gente a vivir a Marte sin billete de vuelta, ha sido adquirida por InFin Innovative...

Verano en Saturno – NASA/JPL/SSI/Ian Regan Aunque la sonda Cassini sigue funcionando perfectamente a pesar de llevar algo más de doce años en órbita alrededor de Saturno sabemos que su final se producirá en 2017, cuando agotado su combustible se sumerja en...

David Wolf, primer estadounidense en votar desde el espacio Con medio mundo pendiente del resultado de las elecciones presidenciales de los Estados Unidos resulta curioso saber que desde 1997 los astronautas de la NASA que así lo deseen pueden votar aún estando...

En 2033 una misión internacional lanza a seis astronautas con destino a Marte. Pero durante el aterrizaje un fallo en el módulo de descenso hace que aterricen a más de 100 kilómetros de su punto de destino en el que los...

Tras un par de amagos a las 10:00 y a las 11:01 el primer cohete Larga Marcha 5 de la Corporación de Ciencia y Tecnología Aeroespacial de China despegaba por fin a las 12:43 del 3 de noviembre de 2016. Con...
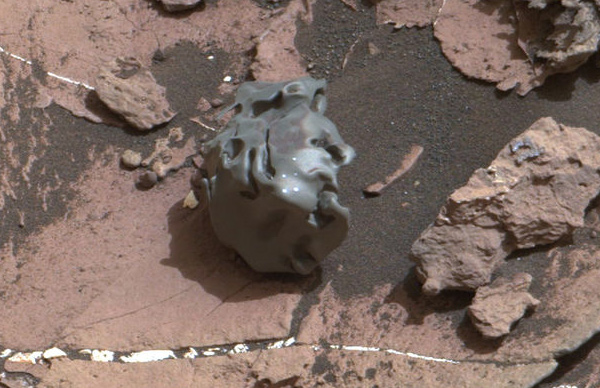
Ahí está, el bonito meteorito que encontró el rover Curiosity en Marte el pasado 30 de octubre en una imagen captado por la Mastcam (Mast Camera) a bordo del rover marciano. La roca tiene el tamaño de una pelota de golf...
Por Nacho Palou -
3 NOV 2016

La empresa española PLD Space, al frente de un proyecto en el que también colaboran Comet Ingeniería y Tecnalia CTA, ha recibido el encargo por parte de la Agencia Espacial Europea de llevar a cabo un programa con el que se...
Asterank es una base de datos «científica y económica» que recopila información sobre más de 600.000 asteroides con datos como su composición principal —níquel, hierro, cobalto, agua, nitrógeno,...—, distancia y masa. Con esos datos Asterank calcula cuál es su valor económico...
Por Nacho Palou -
2 NOV 2016

El primer Larga Marcha 5 o CZ-5, por su nombre chino, Changzheng 5, está listo para su lanzamiento en una de las plataformas del Centro de Lanzamiento de Satélites de Wenchang de la isla de Hainan. En su variante más potente...

Terraformar es un precioso término que describe cómo se podrían recrear en un planeta o satélite las condiciones naturales para la vida terrestre, en particular para que los seres humanos podamos colonizarlo. Esta idea es todavía muy de ciencia-ficción –de hecho...

Se venía rumoreando desde hace algún tiempo pero ahora ya es oficial: Rusia va a reducir a dos el número de tripulantes de su segmento de la Estación Espacial Internacional. Tal y como se puede leer en Roscosmos confirms ISS mission line-ups...

Un problema con el llenado de los depósitos de LOX y helio parece ser la causa.
Nadie se hace astronauta por casualidad– Chris Hadfield Guia de un astronauta para vivir en la Tierra: Lo que viajar al espacio me enseñó sobre el ingenio, la determinación y cómo estar preparado para todo por Chris Hadfield. Ediciones B 2014....

Con un suave aterrizaje a las 5:58 del 30 de octubre de 2016, hora peninsular española, terminaba la primera misión de una cápsula espacial tripulada Soyuz de la serie MS, misión en la que todos los sistemas de a bordo funcionaron a la perfección.
Tal y como estaba previsto la cámara HiRISE de la Mars Reconnaissance Orbiter de la NASA ha tomado nuevas imágenes en alta resolución de los restos de la sonda Schiaparelli de la Agencia Espacial Europea y Roscosmos.

Como la mayoría no podremos poner nunca un pie en la Estación Espacial Internacional la NASA se dedica a publicar de vez en cuando recorridos por el interior de ésta para ponernos los dientes largos. El último –por ahora– de ellos...

Después de entrar en modo seguro el pasado 19 de octubre de 2016 cuando su software de control detectó un error la sonda Juno de la NASA vuelve a estar completamente operativa. El modo seguro de una sonda espacial se activa...
«… He guardado mi última bengala para una ocasión especial como esta…» Quién sabe si el final inesperado de la Schiaparelli de la misión ExoMars pudo ser algo como esto… CommitStrip tiene muchos cómics con las «aventuras» de los rover marcianos: Meanwhile,...

Esa historia tiene algo de rocambolesco, especialmente por el final. El caso es que a alguien se le ocurrió hace dos décadas preservar para el futuro los lenguajes de la humanidad, en una especie de «piedra de Rosetta» grabada en un...

Las antenas de radar de Schiaparelli iban montadas en su parte inferior – ESA Según declaraciones en la radio de Rolf Densing, el director de operaciones del Centro Europeo de Operaciones Espaciales de la Agencia Espacial Europea, un fallo de software parece...

El proyecto Sky Canvas Project aspira a convertir el cielo nocturno en un lienzo en blanco negro para pintarlo con estrellas fugaces artificiales. La idea la está desarrollando la startup japonesa ALE, y consiste en un satélite situado en órbita cargado...
Por Nacho Palou -
25 OCT 2016

Una de las cosas que la Administración Espacial Nacional China (CNSA) colocó a bordo del laboratorio espacial Tiangong–2 antes de su lanzamiento fue el satélite Banxing–2, cuyo nombre quiere decir, literalmente, satélite compañero. Con un peso de 47 kilos y el...

El 24 de octubre de 2001 la sonda Mars Odyssey de la NASA entraba en órbita alrededor de Marte para una misión con una duración prevista de 32 meses, aunque en el momento de publicar esta anotación acaba de cumplir los...
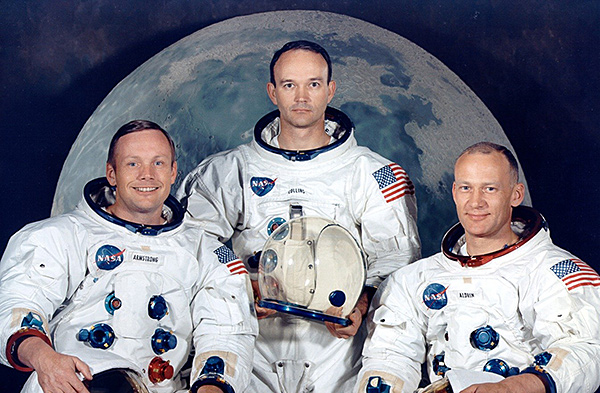
La tripulación del Apolo XI. De izquierda a derecha: Neil Armstrong, Michael Collins, y Buzz Aldrin. NASA En NPR, Neil Whosis? What You Don't Know About The 1969 Moon Landing, En el libro No Requiem for the Space Age [2014], Matthew Tribbe...
Por Nacho Palou -
24 OCT 2016
El 14 de julio de 2015 a las 13:57:49, hora peninsular de España, la sonda New Horizons de la NASA llevó a cabo su sobrevuelo de Plutón, recogiendo durante los días previos y posteriores tantos datos como pudo acerca del ex–planeta...
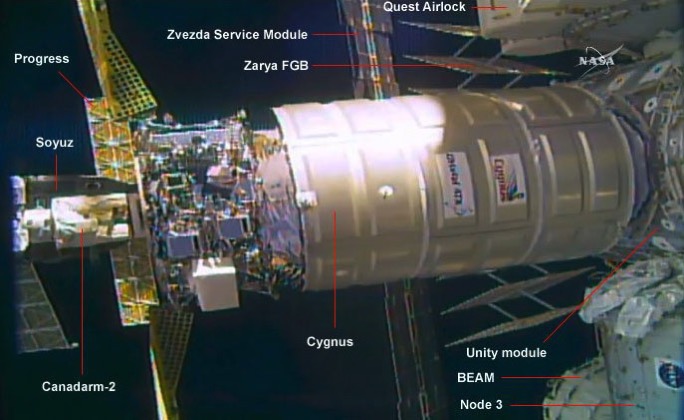
Impresión artística de una Cygnus aproximándose a la EEI El mecanismo de anclaje se hizo un poco el remolón cuando la Cygnus OA–5 estaba ya colocada en su lugar de la Estación Espacial Internacional pero al final a las 16:53 del 23...
Todos los sistemas de a bordo de la Soyuz MS–02 funcionaron a la perfección durante los días que empleó para llegar a la Estación Espacial Internacional, a donde de hecho llegó unos minutos antes de lo previsto. La cápsula tripulada atracó de...
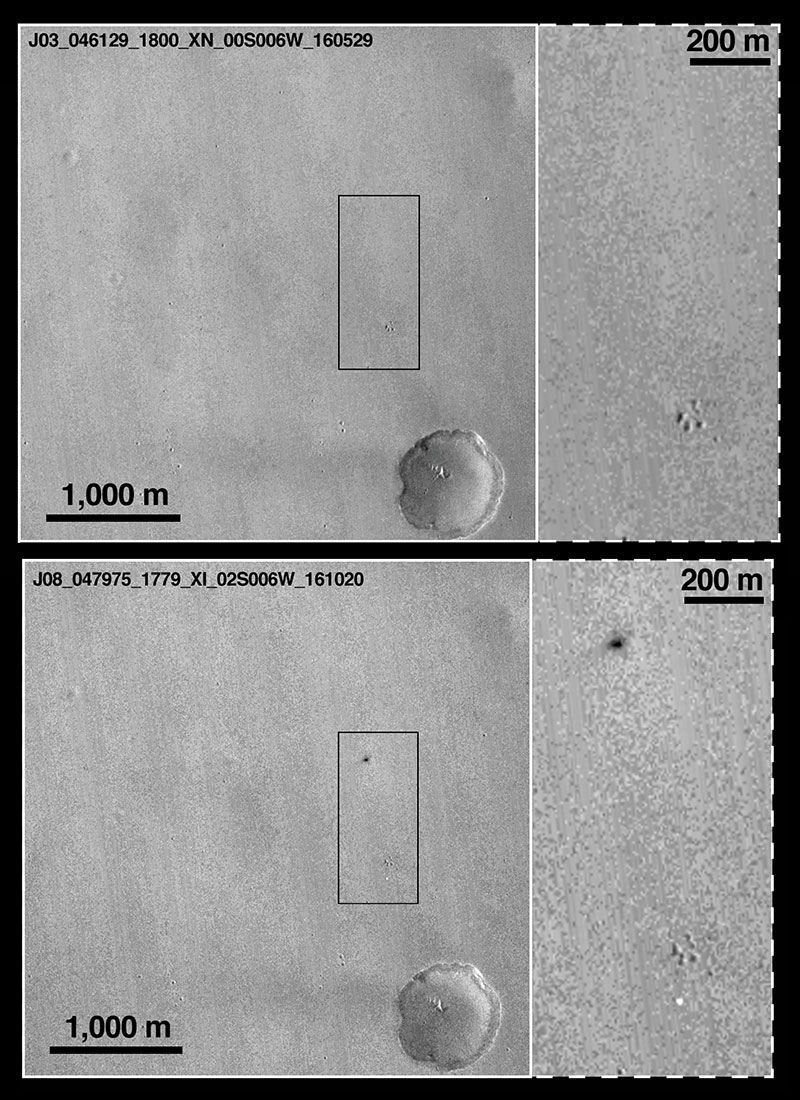
Arriba la imagen de mayo de 2016; abajo la posterior a la llegada de Schiaparelli – NASA/JPL-Caltech/MSSS La Mars Reconnaissance Orbiter de la NASA ha fotografiado con su cámara de baja resolución la zona prevista de aterrizaje del módulo Schiaparelli de la...
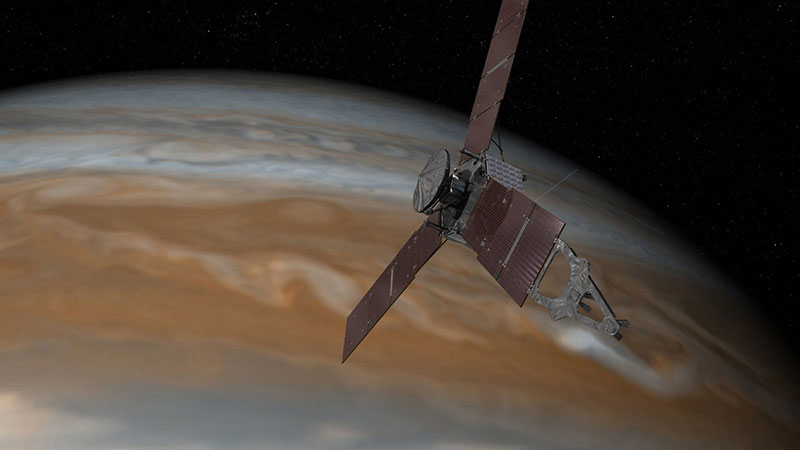
El 19 de octubre de 2016, cuando estaba a unas 13 horas de su máxima aproximación al planeta en su segunda órbita alrededor de Júpiter, la sonda Juno de la NASA entró en modo seguro. El modo seguro de una sonda...

Despegue de la Soyuz MS–02– NASA/Joel Kowsky La cápsula espacial tripulada Soyuz MS–02 despegaba a las 10:05 del 19 de octubre de 2016, hora peninsular española, sobre cohete Soyuz-FG rumbo a la Estación Espacial Internacional. Sí, los cohetes y las cápsulas tripuladas...
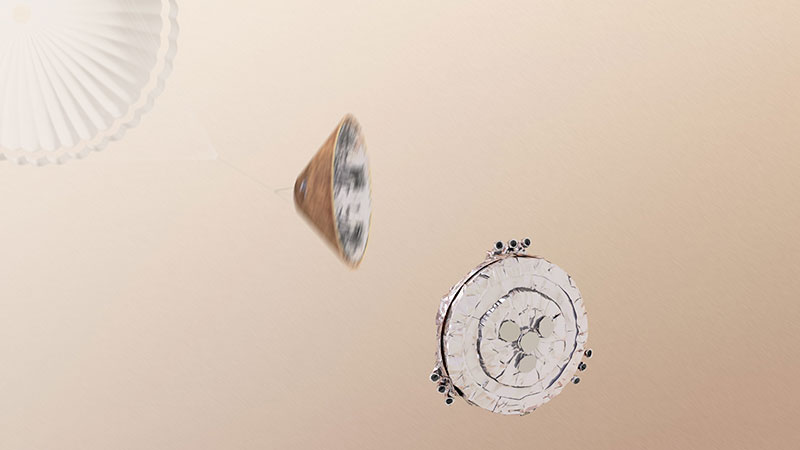
Los periodistas presentes en la rueda de prensa al respecto han tenido que sacárselo con sacacorchos en la sesión de preguntas, pero al final la los representantes de la Agencia Espacial Europea presentes han tenido que reconocer que no saben aún...
Jing Haipeng, el comandante de la nave tripulada Shenzhou 11, se convertía a las 00:25 del 19 de octubre de 2016, hora peninsular española, en la primera persona en entrar en la estación espacial Tiangong–2, aunque oficialmente China la denomina laboratorio...
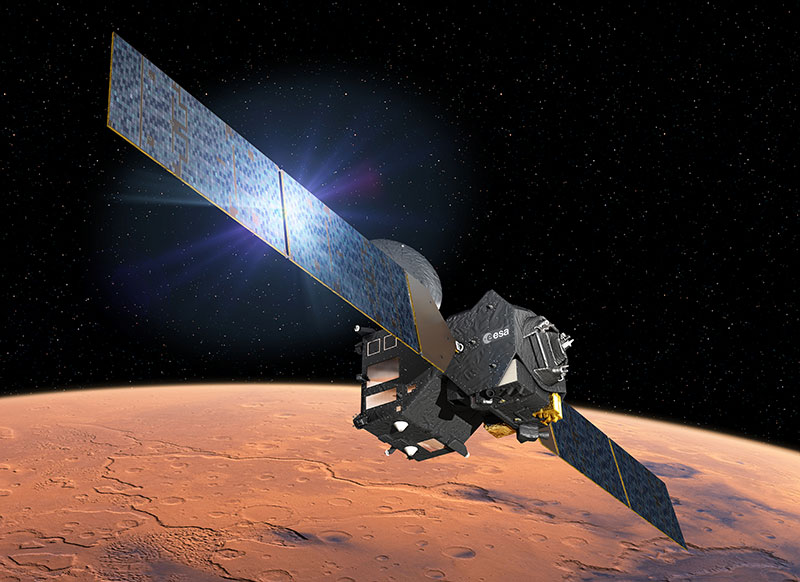
La maniobra de inserción orbital de la sonda Trace Gas Orbiter de la Agencia Espacial Europea ha ido como la seda y a las 18:35 del 19 de octubre de 2016 se ponía en contacto con el control de la misión...
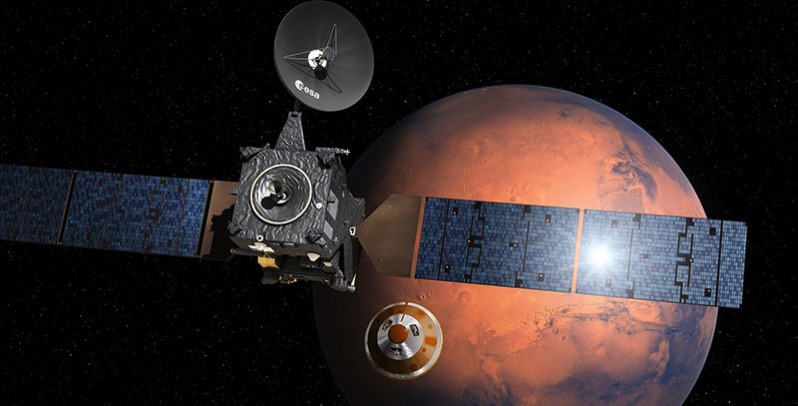
Tras años de preparativos y siete meses de viaje y unos 500 millones de kilómetros recorridos la misión ExoMars 2016 de la Agencia Espacial Europea y de Roscosmos está a unas horas de alcanzar su destino. A lo largo de la...

A la 1:45 del 18 de octubre de 2016, hora peninsular de España, un cohete Antares 230 despegaba del espaciopuerto de la isla Wallops para poner en órbita la cápsula de carga Cygnus CRS OA-5 con destino a la Estación Espacial...

A las 16:42 del 19 de octubre de 2016, hora peninsular española, el aterrizador Schiaparelli de la misión ExoMars 2016 de la Agencia Espacial Europea se encontrará con la atmósfera de Marte a 121 kilómetros de altitud y a una velocidad...

Mark McCaughrean, asesor científico del Centro Europeo de Investigación y Tecnología Espacial (ESTEC), nos cuenta en este vídeo qué tipo de cosas podemos aprender de misiones como Rosetta o ExoMars, que más allá de buscar vida en otros lugares del sistema...
Lanzamiento de la Shenzou 11 Los astronautas –aunque China se refiere a ellos como taikonautas– Jing Haipeng y Chen Dong despegaron a las 23:30 del 16 de octubre de 2016 a bordo de la nave Shenzhou 11 rumbo a la Tiangong-2, Palacio...
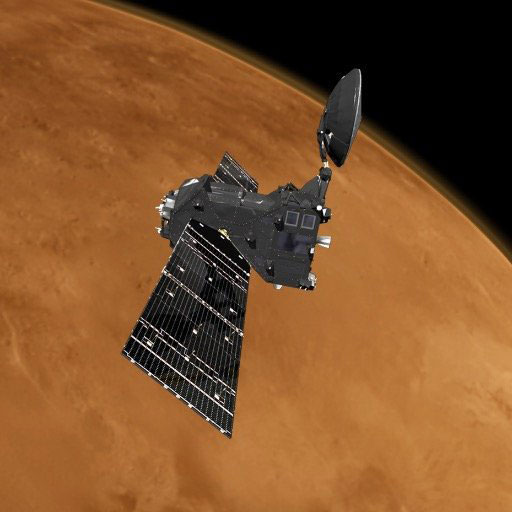
Con el objetivo de dejar al aterrizador Schiaparelli rumbo a Marte, a donde llegará el miércoles 19 de octubre de 2016, la sonda Trace Gas Orbiter de la Agencia Espacial Europea iba en rumbo de colisión con el planeta. El motivo de...
Impresión artística de la separación de la TGO y de Schiaparelli - ESA La misión ExoMars 2016 de la Agencia Espacial Europea y Roscosmos ha pasado con éxito un importante punto de su desarrollo con la separación de la Trace Gas Orbiter...
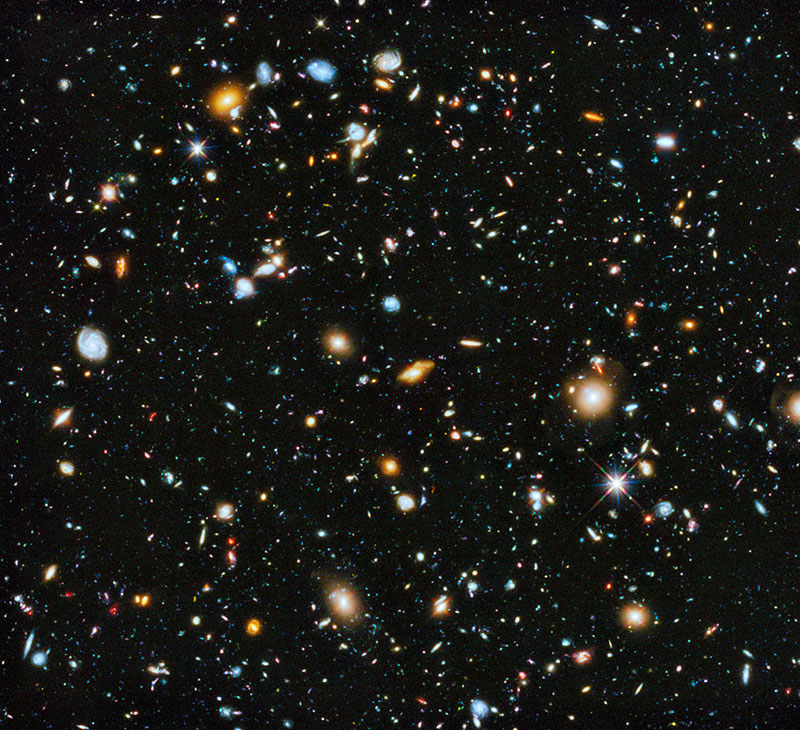
El universo podría contener diez veces más galaxias de lo que se creía hasta ahora, según dicen en Science. En vez de unos 200.000 millones podría haber 2 billones de estas gigantescas estructuras en las cuales a su vez hay millones...

Hay que hacer 2,8 kilómetros de soldadura perfecta para fabricar el tanque de aluminio de 40 metros de alto para el nuevo cohete SLS (Space Launch System) de la NASA. En total, la capacidad para propergol suma —entre hidrógeno líquido y...
Por Nacho Palou -
10 OCT 2016
Ayesha publicó este vídeo explicativo a modo de Guía rápida de las ondas gravitacionales, esas curiosas oscilaciones en el espacio–tiempo que inundan los confines del universo. Las ondas gravitacionales acarrean los registros de los más apocalípticos eventos que hayan sucedido al...

El legado principal de la misión Rosetta es sin duda la enorme cantidad de datos que ha recogido acerca del cometa 67P/Churyumov-Gerasimenko y los que recogió sobre los asteroides Lutetia y Steins mientras iba para allá. Pero sin duda es también...

El cohete New Shepard de Blue Origin ha superado una importantísima prueba de cara a su certificación para volar con pasajeros con una prueba con éxito del sistema de escape de la cápsula tripulada. Unos 45 segundos después de un lanzamiento...

La semana pasada SpaceX desveló su sistema de transporte interplanetario, con el cual ambiciona viajar a Marte, que incluye la construcción de un cohete jodidamente grande (nombre inicial del proyecto: Big Fucking Rocket) que contará con 42 motores “Raptor” o 42...
Por Nacho Palou -
5 OCT 2016

Eso me hacía preguntarme cada tarde por el sentido de la existencia, asombrarme de la fugacidad y fragilidad del ser humano, darle vueltas, con Leibniz, a por qué existe algo (el universo) en vez de no existir nada. Es donde comencé con...

Amy Shira Teitel de Vintage Space ha comenzado una miniserie sobre los antiguos programas espaciales soviéticos y sus paralelismos con algunos de los más actuales, especialmente el SpaceX de Elon Musk. Aquí narra la curiosa historia del cohete N-1, sobre el...

Actualizado 5/10: Elon Musk considera «improbable» que se trate de un caso de sabotaje, pero comparte las «grandes teorías» recopiladas en Ranking Potential Saboteurs of Elon Musk’s SpaceX Venture. El pasado 1 de septiembre un Falcon 9 de SpaceX se incendió...
Por Nacho Palou -
3 OCT 2016

Por aquí hemos hablado alguna vez de las máquinas de Von Neumann, una idea sumamente interesante planeada hacia 1948-49 por uno de los matemáticos pioneros de la historia de la informática: John von Neumann. Este vídeo de TED-ed es un estupendo...
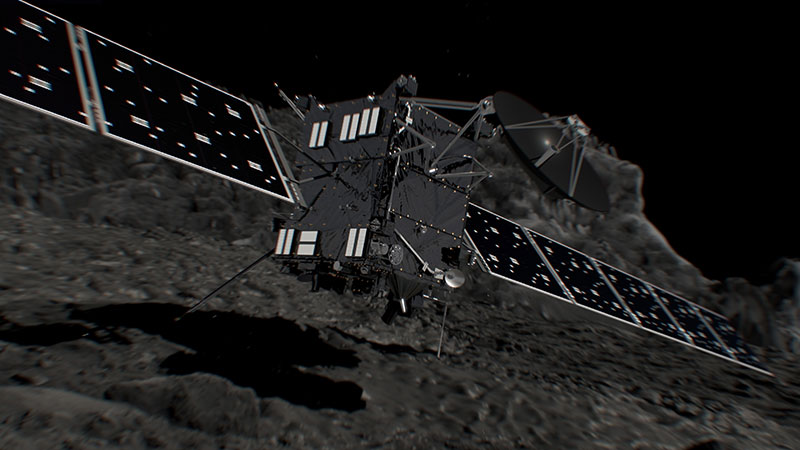
Hoy, 30 de septiembre de 2016, es el día en el que la Agencia Espacial Europea pone fin a la misión Rosetta, una de las más ambiciosas y de mejores resultados de los últimos años. El gran final de la misión...

En Space, Dream Chaser Space Plane to Fly United Nations Mission in 2021, Sierra Nevada Corporation (SNC) y la Oficina para los Asuntos del Espacio Exterior de las Naciones Unidas (United Nations Office for Outer Space Affairs, UNOOSA) lanzarán conjuntamente una...
Por Nacho Palou -
29 SEP 2016

Elon Musk ha presentado por fin su plan para hacer de la humanidad una especie multiplanetaria, con primera parada en Marte. Y es un plan ambicioso, muy ambicioso. Probablemente demasiado ambicioso. La idea es construir un enorme cohete –más grande que...
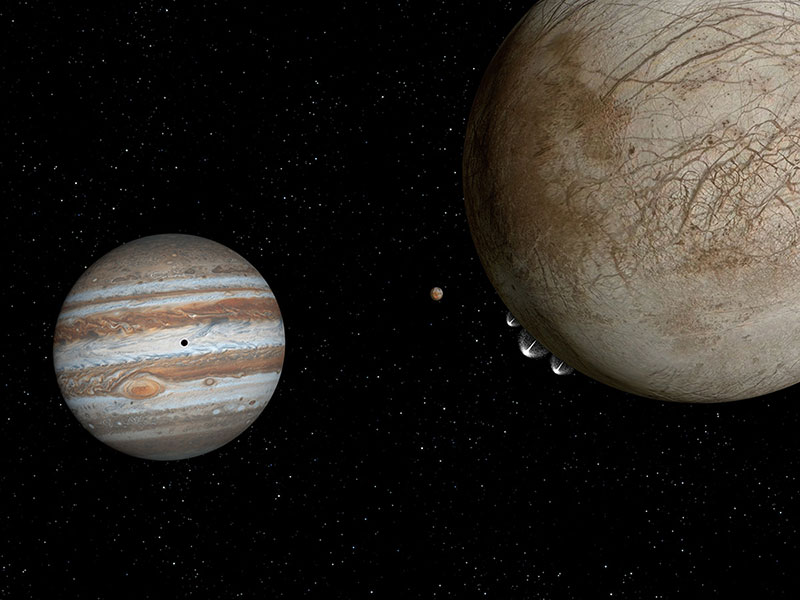
Impresión artística de los chorros de vapor de agua de Europa – NASA, ESA, y G. Bacon (STScI) Ya en 2012 el telescopio espacial Hubble parecía haber detectado unos chorros de vapor de agua saliendo del hemisferio sur de Europa, una de...

Lanzada el 2 de marzo de 2004 con el objetivo de colocarse en órbita alrededor del núcleo del cometa 67P-Churyumov/Gerasimenko para acompañarlo en su periplo hacia el Sol y de depositar un aterrizador sobre él la misión Rosetta de la Agencia...
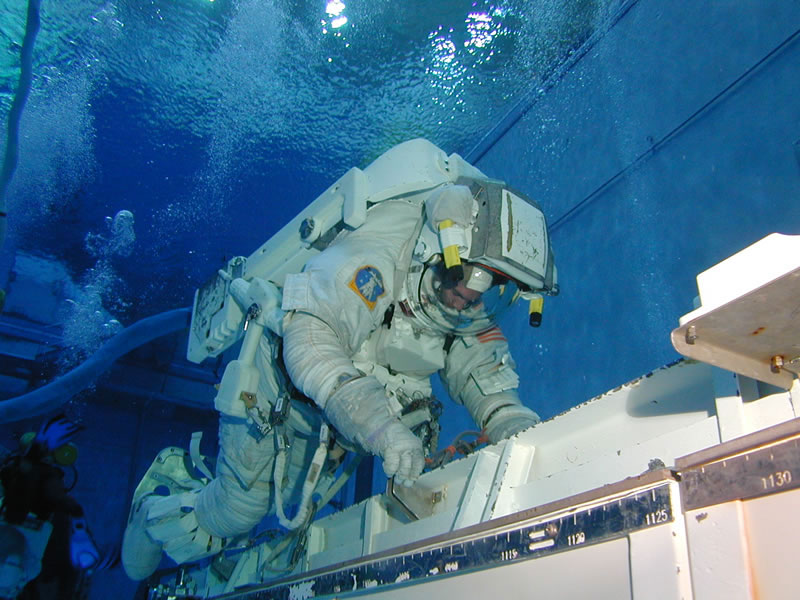
Mientras no inventemos la anti–gravedad la principal forma que tienen las distintas agencias espaciales de entrenar a sus astronautas para un paseo espacial es sumergirlos en una piscina metidos en un traje espacial convenientemente lastrado para simular la ingravidez. Entre el...
El pasado 8 de septiembre de 2016 la NASA lanzaba la misión Osiris-Rex rumbo al asteroide Bennu. Llegará allí en agosto de 2018 tras un encuentro con la Tierra en septiembre de 2017 que le permitirá ganar velocidad y modificar la...

El vídeo corresponde a la prueba de encendido de un propulsor complementario del cohete SLS de la NASA. Tuvo lugar a finales del mes de junio pasado. El motor de prueba se encendió con éxito, expulsando gases a más de 3300°...
Por Nacho Palou -
16 SEP 2016
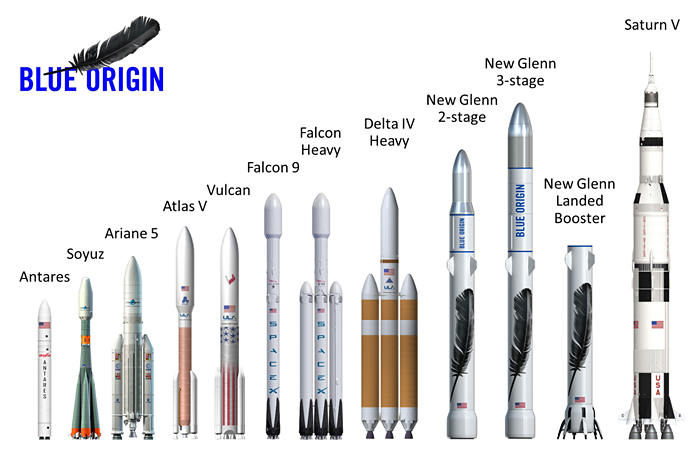
Dependiendo de la configuración de 2 o de 3 fases el cohete New Glenn alcanzará los 82 o los 95 metros de altura. El «landed booster» es la parte reutilizable que vuelve a tierra. El Saturno V medía 110 metros de altura...
Por Nacho Palou -
13 SEP 2016
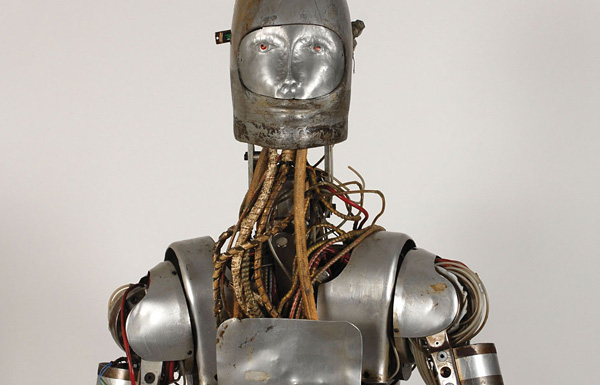
Este dummy a tamaño real y articulado con potencia hidráulica fue construido entre 1963 y 1965 por el ITT Research Institute con el fin de probar los trajes espaciales de la época. De modo que mientras un astronauta podía decirle a...
Por Nacho Palou -
6 SEP 2016
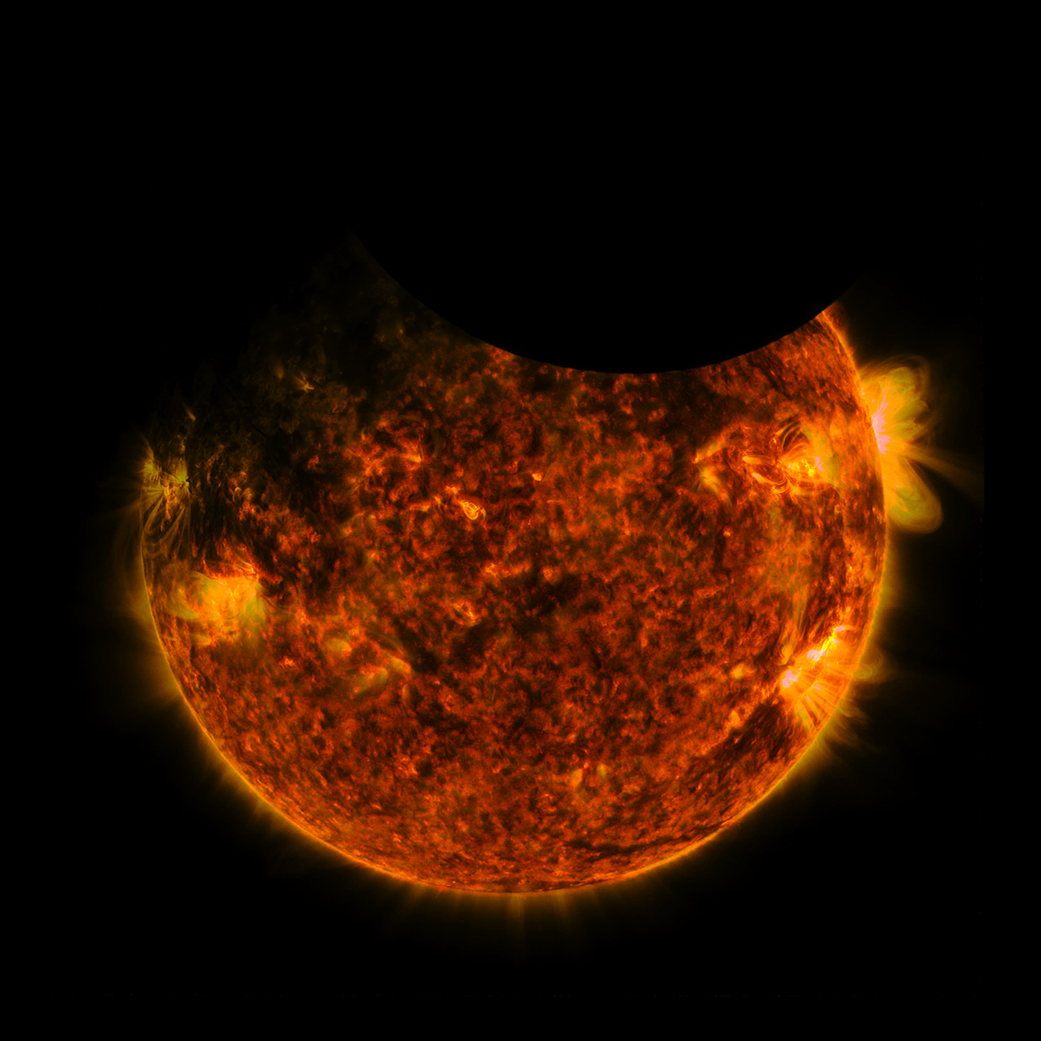
El SDO (Solar Dynamics Observatory) es un telescopio espacial en órbita terrestre destinado principalmente al estudio del sol. Al mantener una órbita geosíncrona de vez en cuando la tierra se interpone entre el sol y el telescopio; esto es, el SDO...
Por Nacho Palou -
6 SEP 2016
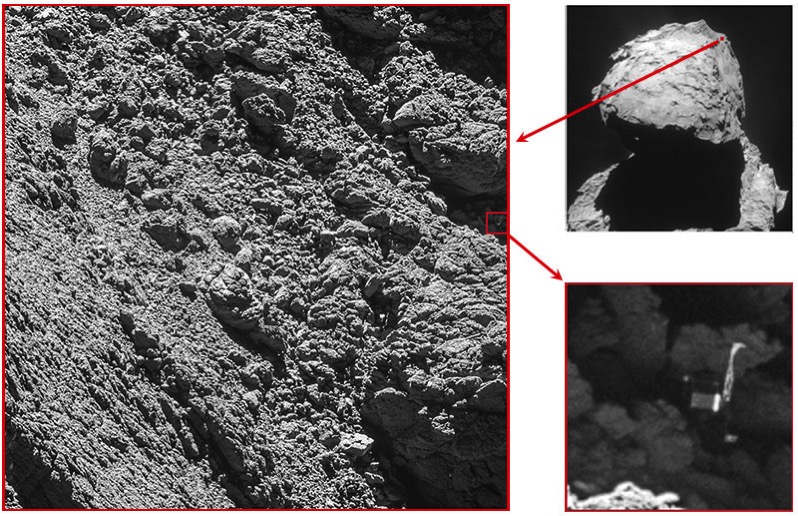
Philae sobre 67P – Imagen principal y de Philae: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA; imagen de 67P: ESA/Rosetta/NavCam – CC BY-SA IGO 3.0 Con poco más de tres semanas restantes en su misión y con todos los objetivos científicos de ésta cubiertos...

Brian May, músico, componente de Queen y astrofísico, ha anunciado en su web y en YouTube, que la Unión Astronómica Internacional (UAI) ha incorporado al asteroide 17473 el nombre de Freddie Mercury, cantente, compositor, líder de la banda mítica británica Queen...
Por Nacho Palou -
5 SEP 2016

A las 13:07 UTC del 1 de septiembre de 2016 el cohete Falcon 9 de SpaceX que tenía previsto lanzar el satélite de comunicaciones Amos–6 el día 3 resultó destruido en la plataforma de lanzamiento 40 de Cabo Cañaveral durante una...

La Dragon 9 a su partida de la EEI Un amerizaje a 525 kilómetros al oeste de Baja California a las 15:47 UTC del 26 de agosto de 2016 ponía fin a la misión de la cápsula de carga Dragon SpX–9...
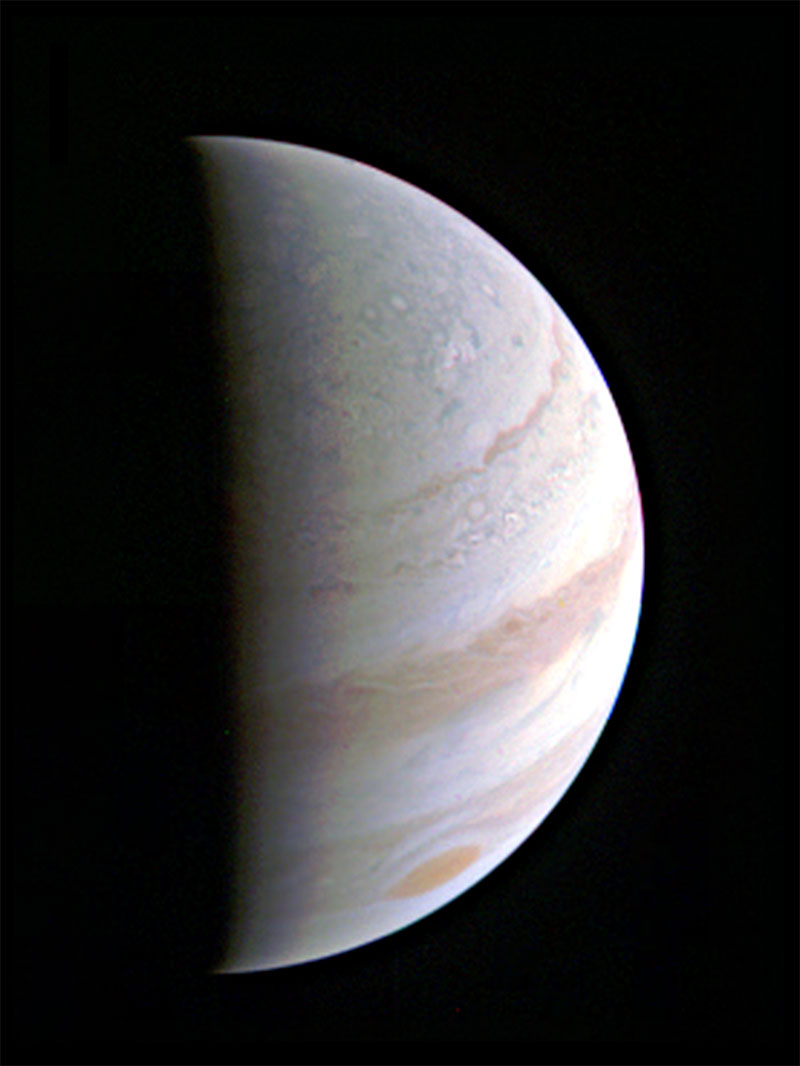
Júpiter desde 703000 kilómetros de distancia – NASA/JPL-Caltech/SwRI/MSSS La sonda Juno de la NASA está en órbita alrededor de Júpiter desde el 5 de julio de 2016. Pero antes de comenzar la fase principal de su misión tiene que trazar dos órbitas...
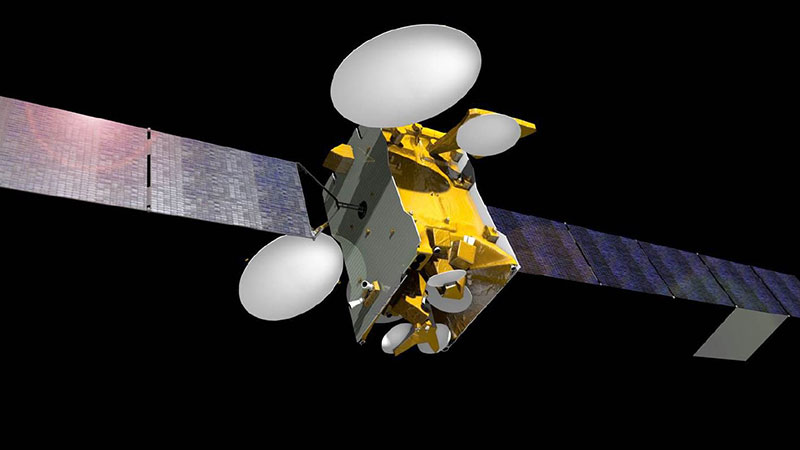
Impresión artística del SES-10 SES, la empresa que en 2013 se convertía en el primer operador de satélites de comunicaciones en lanzar con SpaceX, será también el primero en aprovechar uno de sus cohetes recuperados tras el lanzamiento. Tal y como se...

Space recovery USB – ESA Este de aquí es el pincho USB en el que está el software de recuperación del ordenador que controla un experimento instalado en el laboratorio Columbus de la Estación Espacial Internacional que tiene como objetivo el estudio...
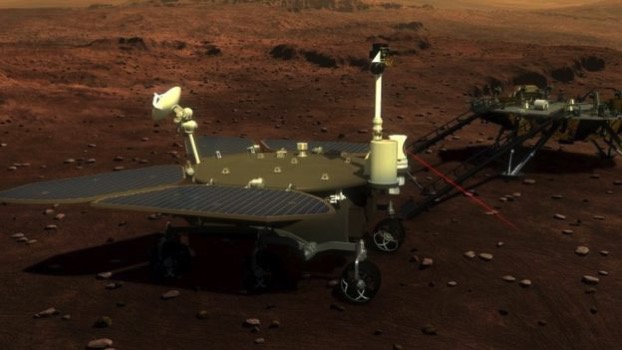
El aterrizador y el rover – Xinhua Administración Nacional Espacial China –la NASA china– acaba de anunciar que tienen la intención de aprovechar la ventana de lanzamiento de 2020 para enviar una misión a Marte. Esta consistirá de un orbitador, un aterrizador,...

Las fotografías tomadas por los astronautas del programa Apolo son algunas de las imágenes más importantes del siglo XX y probablemente de toda nuestra historia como especie, ya que documentan nuestro primer viaje a otro astro. Como dijo Richard W. Underwood,...

Un vídeo en 360º de los buttes de Murray, así llamados en honor a Bruce C. Murray, director del Laboratorio de Propulsión a Chorro y co-fundador de la Sociedad Planetaria, formado a partir de imágenes tomadas por Curiosity el 5 de...
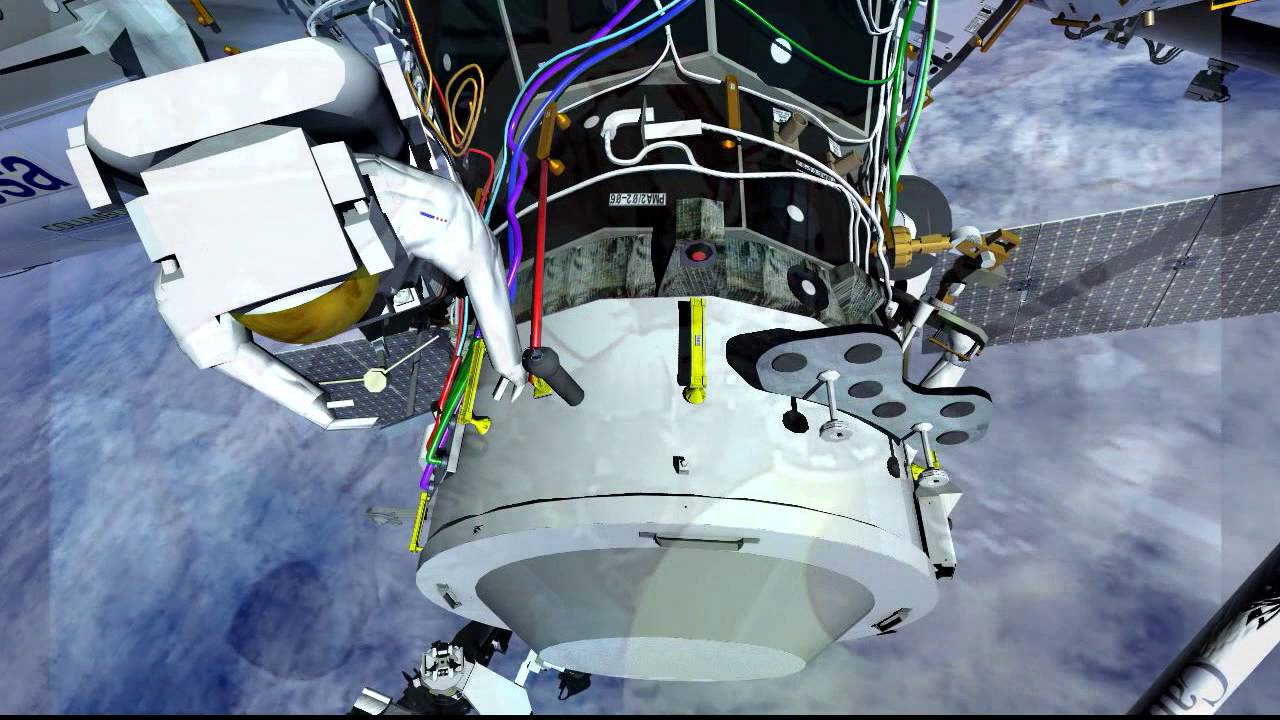
Jeff Williams, en su cuarto paseo espacial, y Kate Rubins en el primero, han dejado listo para su uso el primer puerto IDA, de International Docking Adapter, de la Estación Espacial Internacional el 19 de agosto de 2016. Diseñado para ser...

El astronauta de la NASA Story Musgrave fue la única persona del mundo en volar en los cinco transbordadores espaciales de la agencia. Su primera y segunda misión fueron a bordo del Challenger; las otras cuatro fueron a bordo del Discovery,...
Si ahora hasta los libros tienen tráilers el nuevo disco de Vangelis titulado Rosetta, inspirado por la misión homónima al cometa 67P/Churyumov-Gerasimenko de la Agencia Espacial Europea, no va a ser menos Sale a la venta el 23 de septiembre de...

El vídeo en time-lapse de 60 segundos resume la construcción de un depósito de combustible para cohete. Al ir añadiendo y soldando las distintas secciones el tanque va ganando altura hasta que una vez terminando mide casi 40 metros. El depósito...
Por Nacho Palou -
18 AGO 2016

Desconocía la existencia de Argos, de Active Response Gravity Offload System, o Sistema de Respuesta Activa de Descarga de Gravedad, un cacharro que permite a la NASA simular gravedades más reducidas que las de la Tierra. Jessica Meir en Argos –...

Entre otras cosas Mary Jackson, Katherine Johnson y Dorothy Vaughan ayudaron a la NASA a no quedarse definitivamente atrás en la carrera espacial al ayudar a calcular la trayectoria de la cápsula Friendship 7 en la que John Glenn se convirtió...

La NASA, en un giro inesperado de los acontecimientos, descubrió que las naves Apolo necesitaban software. Margaret Hamilton (1936-) salvó el día.

¡Hala que nos vamos! – SpaceX Un cohete Falcon 9 v1.2 de SpaceX despegaba a las 5:26 UTC desde Cabo Cañaveral con la misión de colocar en una órbita de transferencia geoestacionaria el satélite de comunicaciones JCSat-16. El Falcon 9 cumplió su...

Uno de los problemas con los que se encuentra la NASA –y en realidad cualquier agencia o empresa que desarrolle cohetes– es que al filmar o grabar estos para luego estudiar su funcionamiento es imposible obtener detalles en la parte más...

kami ha tenido la paciencia de coger las fotos hechas por los astronautas del Programa Apolo disponibles en Project Apollo Archive y montarlas en este vídeo. Recoge todas las misiones tripuladas del programa y todas las fotos tomadas por los astronautas...
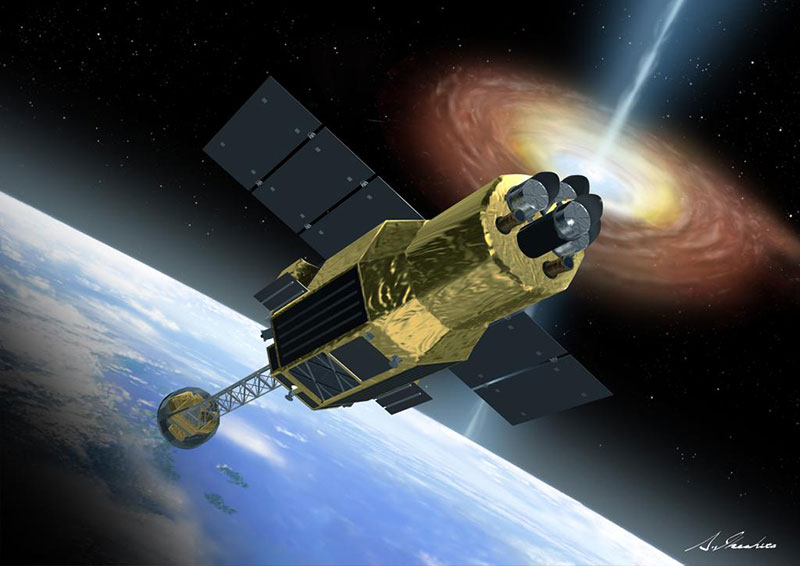
Lanzado el 17 de febrero de 2016, el observatorio espacial de rayos X Hitomi de la Agencia Japonesa de Exploración Aeroespacial resultaba destruido en órbita apenas un mes después mientras aún estaba en su periodo inicial de pruebas. Su pérdida fue...

La superficie de Venus es uno de los sitios más infernales del sistema solar, como pueden atestiguar las sondas Venera y Vega de la Unión Soviética. Y es que aguantar una presión de unas 90 atmósferas y una temperatura promedio en...

Vídeo con subtítulos en español. El número de planetas «potencialmente habitables» conocidos (conocidos en teoría) aumenta rápidamente y la NASA cree formalmente que encontrar vida extraterrestre ya sólo es cuestión de tiempo. Lo que lleva inevitablemente a preguntarse sobre la conveniencia...
Por Nacho Palou -
1 AGO 2016

Rosetta, el nuevo disco de Vangelis en honor a la misión homónima al cometa 67P/Churyumov-Gerasimenko de la Agencia Espacial Europea, sale a la venta el 23 de septiembre de 2016. Los títulos de los temas que contiene son Origins (Arrival) Starstuff...

Elon Musk sigue adelante con su plan para dominar el mundo poner en servicio cohetes reutilizables que abaraten el coste de los lanzamientos, en este caso a través de su empresa SpaceX. Musk ha dicho en varias ocasiones que esperan poder...
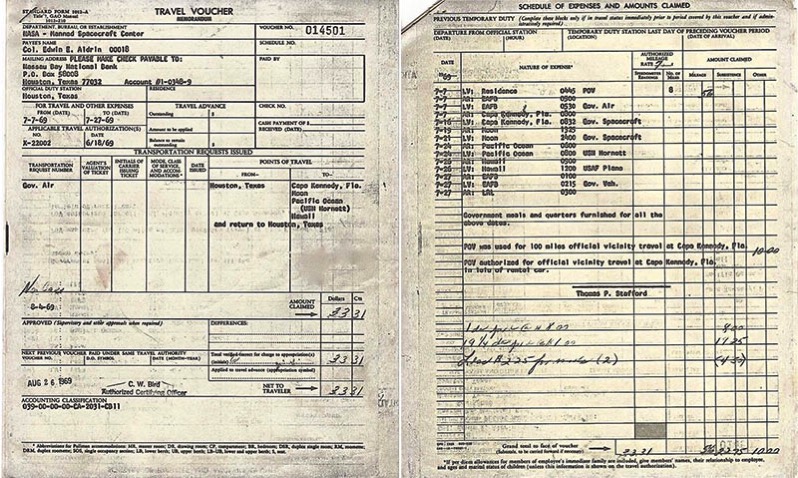
Esta es, según el mismo Buzz Aldrin, la nota de gastos que presentó a la NASA tras su viaje a la Luna en la misión Apolo 11, que terminó el 27 de julio de 1969. No le costó un duro ir...
Philae durante su descenso hacia 67P Dentro de la campaña para optimizar el uso de la energía que producen sus paneles solares según se va alejando del Sol los responsables de la misión dieron la orden a Rosetta de apagar la radio...
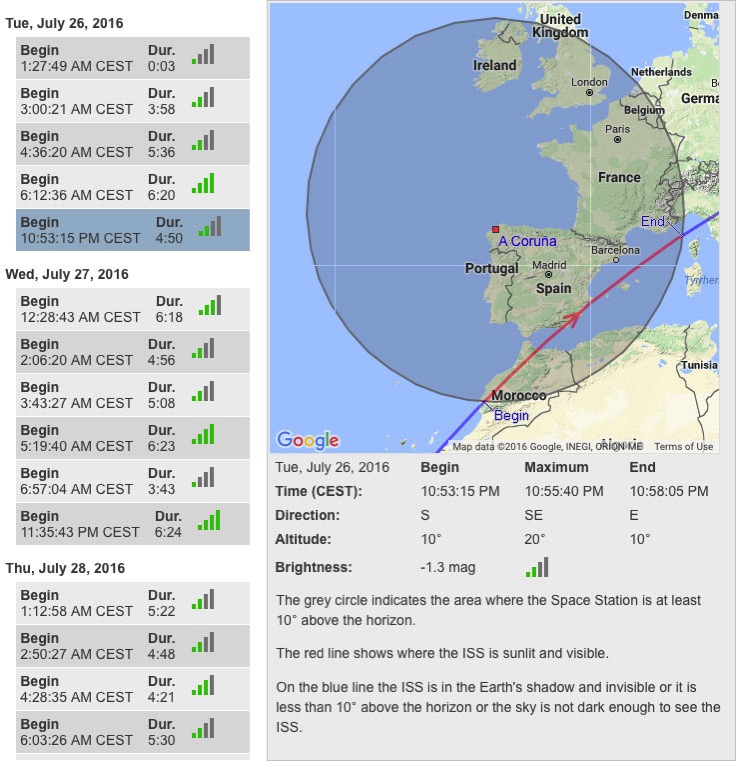
Una de las cosas que mucha gente no sabe –aunque no será porque yo no haya dado la lata con ello– es que la Estación Espacial Internacional es muy fácil de ver a simple vista. Esto es debido a que sus grandes...

Si pudiéramos oír el sonido que emite nuestro Sol porque el vacío del espacio transmitiera el sonido (por suerte no lo hace), viviríamos con un estruendo continuo que llegaría hasta la Tierra con una intensidad de 100 dB tras haber recorrido...
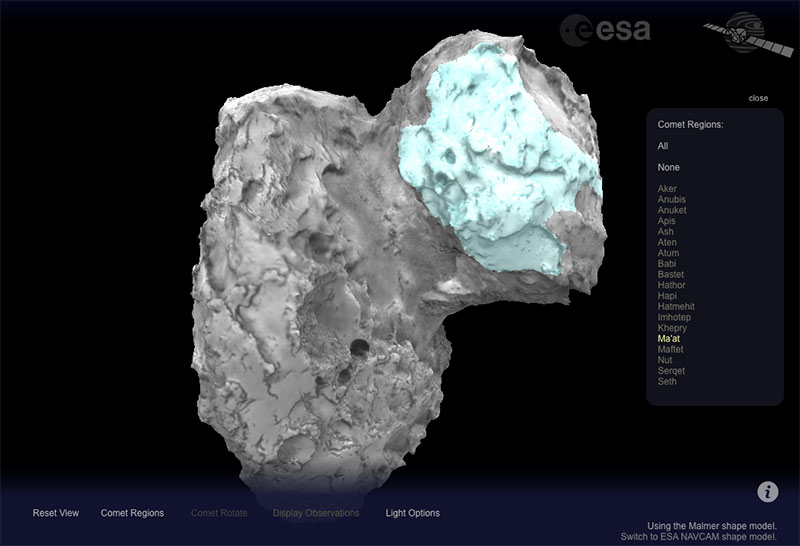
Ma'at en el modelo 3D en línea de 67P La Agencia Espacial Europea ha decidido que el 30 de septiembre de 2016 la sonda Rosetta, ahora mismo en órbita alrededor del núcleo del cometa 67P/Churyumov–Gerasimenko, aterrizarará en Ma'at, una zona del lóbulo...

Falcon 9: Launch and Landing La Tierra es la cuna de la humanidad, pero no se puede estar para siempre en la cuna.– Konstantín Tsiolkovski,pionero de la astronáutica Esta foto del lanzamiento de la cápsula de carga Dragon SpX–9 tomada por Michael Seeley,...
Apollo 11 Flight Plan Re-Issue es uno de esos proyectos en Kickstarter que consiguen financiación apenas empiezan a recoger fondos. Y en este caso no me extraña. Se trata de hacer una reedición lo más fiel posible al original –supongo que...
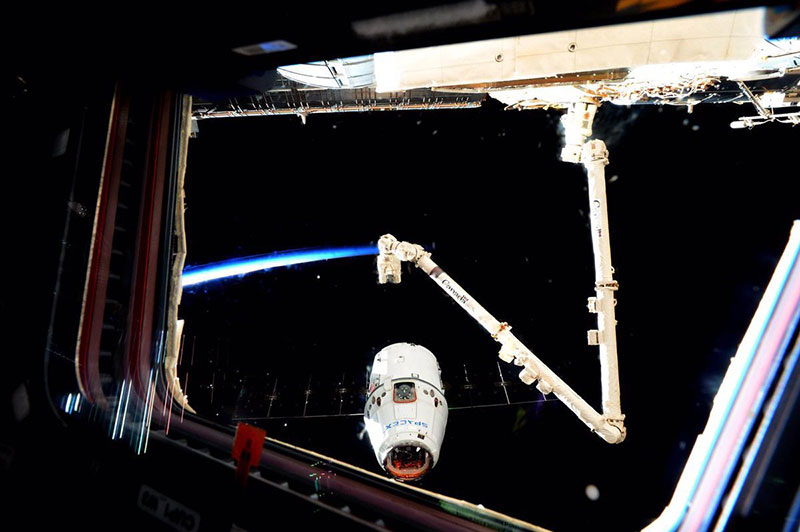
La Dragon SpX–9 lista para ser capturada – NASA A las 14:03 UTC del 20 de julio de 2016 la cápsula de carga Dragon SpX–9 quedaba unida al puerto de atraque de la parte inferior del módulo Harmony tras su captura por...

A las 11:53 UTC del 20 de julio de 1976 el aterrizador de la misión Viking 1 de la NASA tomaba tierra en Chryse Planitia, convirtiéndose en la primera sonda en sobrevivir al aterrizaje en el planeta rojo. La habían precedido...
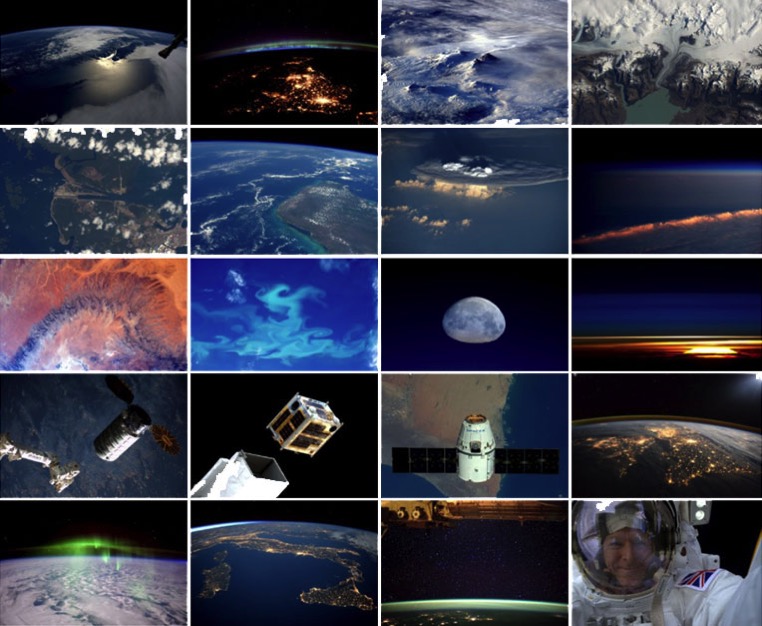
Se me había quedado traspapelado el enlace a Tim's top 20, una galería de las 20 mejores fotos tomadas por Tim Peake durante su estancia en la Estación Espacial Internacional. Han sido seleccionadas por el fotógrafo Max Alexander entre las algo...

Si estás interesado –y probablemente si no lo estás también sea una buena idea que participes– puedes apuntarte al Debate Ciudadano Europeo sobre el espacio que ha organizado la Agencia Espacial Europea: Más de 2000 ciudadanos, elegidos para que reflexionen sobre...

La Progress MS–03 llegando a la EEI – NASA/Jeff Williams Un nuevo envío de suministros llegaba a la Estación Espacial Internacional cuando la cápsula de carga Progress MS–03 atracaba de forma automática en el módulo Pirs de esta a las 0:20:30 UTC...

Rehidratando la comida… ¿Pero de dónde viene el agua? ¿Hay wifi en la Estación Espacial Internacional? ¿Qué comen los astronautas? ¿cada cuanto tiempo se cambian de ropa? ¿Es necesario reciclar todo, todo a bordo de ésta? ¿Está terminada de construir? ¿Caducará cual...
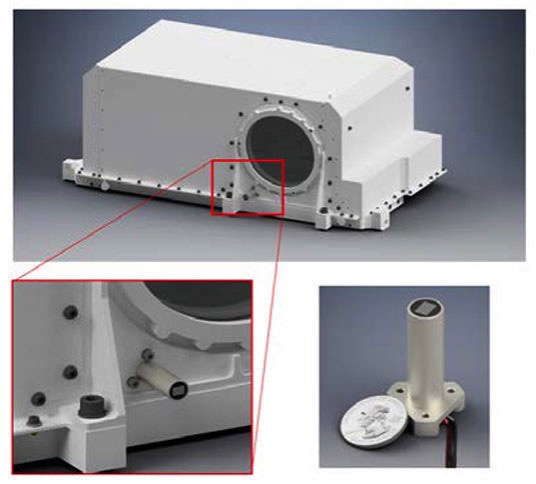
Tras dos intentos fallidos parece que por fin tendremos dos micrófonos en Marte en 2020. El primero de estos intentos fallidos lo llevamos a cabo con el Mars Polar Lander, que se estrelló en 1998; el otro fue con el Phoenix Mars...

Esta foto de larga exposición recoge el despegue de la cápsula de carga Dragon SpX–9 y el aterrizaje de la primera etapa del cohete que la lanzó – SpaceX La Estación Espacial Internacional necesita unas 14 toneladas de suministros cada seis meses...

Ya hay varios cientos de personas enterradas en el espacio (¿sería más apropiado decir «espaciadas»?) Es el lugar en que ellas o sus seres queridos decidieron que descansaran sus restos tras fallecer. El primer envío de restos humanos al espacio tuvo...

Júpiter y tres de sus lunas– NASA/JPL-Caltech/SwRI/MSSS Esta es la primera imagen enviada a la Tierra por la JunoCam de la sonda Juno de la NASA tras haber entrado en órbita alrededor de Júpiter y haberse acercado en el proceso hasta sólo...
Impresión artística del encuentro de la New Horizons con un objeto del cinturón de Kuiper - NASA/JHUAPL/SwRI/Alex Parker Cada vez hacemos mejor las sondas espaciales, tanto por los avances en materiales y electrónica como porque de fallos anteriores vamos aprendiendo como mejorar...

La Soyuz MS–01 aproximándnse a la EEI Tras un lanzamiento perfecto y una aproximación de dos días en la que se probaron los sistemas de a bordo la Soyuz MS–01 sin que dieran ningún problema, la primera de esta generación, llegaba a...

Expedition 48 Launch: Fotógrafos fotografiando el lanzamiento de la Soyuz MS-01 – NASA / Bill Ingals. Más fotos en Soyuz Rockets into Summer Morning Skies over Baikonur Un cohete Soyuz FG lanzaba a las 1:36 UTC del 7 de julio de 2016...

Último lanzamiento del Atlantis El 8 de julio de 2011 a las 15:29 UTC el transbordador espacial Atlantis despegaba en la última misión de los transbordadores espaciales de la NASA, misión que terminó el 21 de julio a las 9:57. La STS-135...
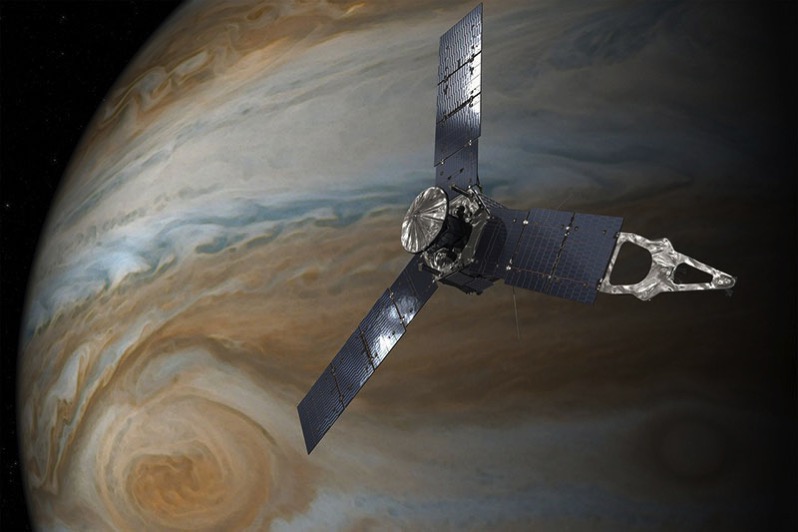
El equipo de la sonda Juno de la NASA está de celebración, ya que en la madrugada del 5 de julio de 2016 esta conseguía ejecutar a la perfección la maniobra de inserción orbital que tenía que dejarla en órbita alrededor...
Todo está listo para que a las 2:30 UTC del 5 de julio de 2016 la sonda Juno de la NASA empiece la maniobra de inserción orbital que tiene como objetivo colocarla en órbita alrededor de Júpiter tras un viaje de...

La subasta Space History de Bonhams tendrá lugar el día 20 de este mes de julio, coincidiendo con el 47 aniversario de la llegada del hombre a la luna. La subasta incluye objetos procedentes de la misión Apolo XI y de...
Por Nacho Palou -
2 JUL 2016

El vídeo corresponde al encendido de prueba del motor de cohete 1A del proyecto Teprel (Tecnología Española de Propulsión Reutilizable Espacial) de la compañía alicantina PLD Space. Con sede en Elche, PLD Space, es una de las pocas empresas que diseñan...
Por Nacho Palou -
30 JUN 2016

Oleg Kotov y Sergey Ryazanskiy con la antorcha de los juegos olímpicos de invierno de Sochi de 2014; Kotov va de rojo y Ryazanskiy de azul Los trajes que usan los astronautas en los paseos espaciales son blancos –o blanco roto, o...

El SLS de la NASA es un megacohete que se piensa utilizar para llegar hasta Marte, algún asteroide u otros destinos lejanos. Durante la prueba ha estado funcionando dos minutos completos, en un remoto lugar de Utah (Estados Unidos)

Hemos publicado ya unas cuantas visitas guiadas a la Estación Espacial Internacional, pero este vídeo, que se pone a los visitantes del ESTEC, me parece especialmente interesante por los primeros minutos, en los que se ve el exterior de la Estación,...
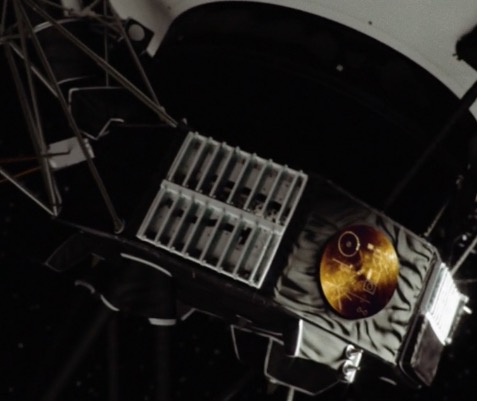
Voyagers es un trabajo de Santiago Menghini que combina vídeos, fotografías e imágenes de las misiones Voyager al espacio exterior. Es todo un homenaje décadas después a los objetos construidos por el Hombre que más se han alejado de nuestro planeta...
Cuarto viaje al espacio para el New Shepard de Blue Origin, la empresa de Jeff Bezos, que en este caso alcanzó una altitud de 101,042 kilómetros, por encima de los 100 kilómetros de la línea de Kármán que por convenio marca...

La Soyuz TMA–19M durante su descenso – NASA/Bill Ingalls ¡Aterrizaje! – NASA/Bill Ingalls El aterrizaje de la Soyuz TMA–19M en Kazajistán a las 9:15 UTC del 18 de junio de 2016 ponía fin a la misión Principia del astronauta Tim Peake de...

Tras conseguir los 10000 votos necesarios de aficionados de todo el mundo y después de pasar la revisión por parte de Lego el Apollo 11 Saturn-V de whatsuptoday y saabfan será finalmente puesto en producción, tal y como se puede leer...

RUD en progreso A las 14:29 UTC un cohete Falcon 9 despegaba desde Cabo Cañaveral con la misión de poner en órbita dos satélites geoestacionarios de telecomunicaciones, el Intelsat 117 West B y el Eutelsat 115 W. El lanzamiento fue un éxito...

El astronauta Jeff Williams ha entrado por primera vez en el módulo hinchable BEAM de la Estación Espacial Internacional tras haber sido expandido este el pasado 28 de mayo de 2016 con el objeto de comprobar su estado, tomar unas primeras...
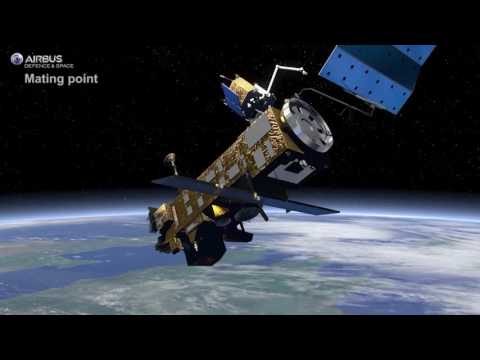
Se calcula que en la actualidad hay unos 29000 objetos de más de 10 centímetros en órbita, muchos de ellos fuera de servicio. Pero basta el impacto de uno de un centímetro como para poder destrozar otro satélite, lo que a...
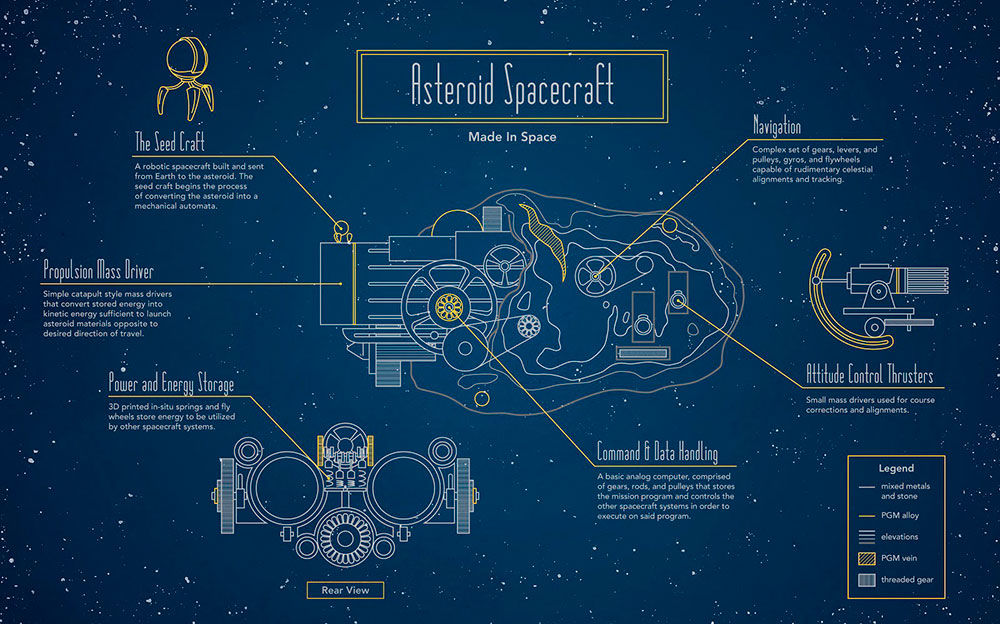
Los «futuristas» de Made in Space trabajan en ingeniería espacial que pueda ponerse en práctica en unos cinco años, quizá diez, y ahora han tenido la oportunidad de colaborar con la NASA en el programa NIAC (Innovative Advanced Concepts) que trata...
Explosión del primer Ariane 5 – ESA El 4 de junio de 1996 el primer Ariane 5 tenía que haber puesto en órbita las cuatro sondas de la misión Cluster, pero en lugar de eso explotó a los 37 segundos de despegar....
Hace unos años tuve la oportunidad de realizar un vuelo en «gravedad cero» en uno de esos aviones que usan las agencias espaciales para entrenar a sus astronautas lo que es la caída libre, una experiencia absolutamente increíble. Xavi Fonseca me...
Roscosmos ha publicado este vídeo del primer lanzamiento de un cohete Soyuz 2–1A desde el cosmódromo Vostochni en el que todas las imágenes a partir del segundo 17 han sido tomadas por las cámaras de a bordo. Claro que no se...
Plutón – ¡Explorado! Hoy, 31 de mayo de 2016, salen a la venta los nuevos sellos de este año del Servicio Postal de los Estados Unidos (USPS), entre los que se incluyen dos que homenajean a la misión New Horizons y en...
Además de la cápsula tripulada Orión que la NASA está desarrollando por sus propios medios la agencia espacial estadounidense está financiando parcialmente el desarrollo de otras dos naves espaciales tripuladas, la Dragon V2 de SpaceX y la Starliner de Boeing. La agencia...
Aprovechando que el núcleo del cometa 67P/Churyumov-Gerasimenko está cada vez mas lejos del Sol, con lo que su actividad es cada vez más reducida, los responsables de la misión Rosetta están aprovechando para acercarla lo más posible al núcleo para obtener...
Scott Kelly en la Cúpula de la EEI El principal objetivo de la misión de un año a la Estación Espacial Internacional en la que participaron Scott Kelly y Mikhail Korniyenko era comprobar cómo responde el cuerpo de una persona a estancias...
Impresión artística de Juno sobre Júpiter Desde el fin de semana del 28 y 29 de junio de 2016 la gravedad de Júpiter es ya la única que han de tener en cuenta los responsables de la sonda Juno de la NASA,...
Expansión de BEAM Los planes originales de Bigelow Aerospace y de la NASA contaban con que BEAM, el Bigelow Expandable Activity Module o Módulo de Actividad Expandible Bigelow, necesitaría 45 minutos para ser hinchado, pero al final fueron necesarias casi ocho horas,...
Este es el vídeo (acelerado) del retorno al espaciopuerto autónomo flotante Of Course I Still Love You de la primera etapa del Falcon 9 FT de SpaceX que puso en órbita el satélite de telecomunicaciones Thaicom 8. El Thaicom 8 tiene...
Tras dejarle algo más de un mes para que se aclimatara a las condiciones ambientales la NASA intentó hinchar el módulo BEAM de la Estación Espacial Internacional el 26 de mayo de 2016. BEAM, de Bigelow Expandable Activity Module o Módulo...
El 13 de julio de 2013 una fuga de agua en el interior de su traje durante un paseo espacial dio un buen susto a Luca Parmitano, a quien no le faltó demasiado para ahogarse dentro de él. Este mismo traje...
Estos días se celebra la Space Tech Expo en Pasadena, California, en la que Lars Hoffman, quien lleva la parte de negocio de SpaceX con el gobierno de los Estados Unidos, explicó el estado de los tres lanzadores Falcon 9 que...
La India está desarrollando un transbordador espacial que espera tener listo alrededor de 2030. Se trata de un vehículo reutilizable de unos 40 metros de largo que tiene como objetivo abaratar los costes de los lanzamientos en un orden de magnitud, rebajando...
La razón, tal y como explicó Amy Shira Teitel en este vídeo para Popular Science es doble: Por un lado, los patrones blancos y negros se utilizan como marcadores de referencia para poder observar mejor la rotación y movimientos del cohete...
«Encontrar meteoritos es más fácil que sobrellevar el clima de la Antártida». Y es que el trabajo de Constantine Tsang no es nada fácil, tal y como nos enseña Great Bit Story. Se pasaron dos meses recorriendo la Antártida en busca...
La EEI vista desde el Endeavour el 29 de mayo de 2011 – NASA Lo cuenta la NASA en Around the World 100,000 Times: la Estación Espacial Internacional ha completado su órbita número 100000 el 16 de mayo de 2016. En ese...
Este pequeño vídeo de 40 segundos contiene unas 20 escenas de 2 segundos cada una que describen formas extrañas, horribles y espectaculares de morir en el espacio. Un plato demuestra lo difícil que será el día a día cuando abandonemos el...
Álvaro Gracia de MetaBallStudios ha reunido en este espectacular vídeo todas las naves del universo Star Trek, de modo que puedan compararse visualmente con facilidad. Esto incluye desde las pequeñas lanzaderas (unos 9 m de largo) hasta la gigantesca nave V’yer...
Territorio inexplorado, aquí hay robots – se podría parafrasear. A New Map of the Planet Mars es un mapa de Eleanor Lutz al estilo de la Era de los exploradores – tal y como lo definió Yeray que es quien nos...
Amerizaje de la Dragon 8 – SpaceX Con un suave amerizaje a unos 400 kilómetros de la costa de California a las 18:54 UTC del 11 de mayo de 2016 la cápsula de carga Dragon SpX–8 terminaba su misión, lo que marca...
Blue Origin acaba de publicar este vídeo del lanzamiento de su cohete suborbital New Shepard que el pasado 2 de abril de 2016 era lanzado por tercera vez, alcanzando una altitud máxima de 103,8 kilómetros. El vídeo empieza justo antes de...
A eso de las 5:30 UTC del 6 de mayo de 2016 la primera etapa un cohete Falcon 9 FT de SpaceX aterrizaba en el espaciopuerto autónomo flotante Of Course I Still Love You tras haber lanzado el satélite de comunicaciones...
Esto no es una bola de discoteca, aunque ciertamente lo parece, sino el satélite artificial Lageos de la NASA, una esfera de aluminio y latón de 60 centímetros de diámetro cubierta de 426 retrorreflectores de esquina, lanzado el 4 de mayo...
Técnicos inspeccionando el espejo del James Webb – Chris Gunn El impresionante espejo principal del Telescopio Espacial James Webb, formado por 18 espejos hexagonales, tiene un diámetro de 6,5 metros, lo que le confiere una superficie útil de 25 metros cuadrados.Estos espejos...
Al más puro estilo del mensaje enviado desde el radiotelescopio de Arecibo el astrofísico René Heller ha lanzado un reto a los aficionados de descifrar mensajes y a la astronomía. El enunciado simplificado es este: Imaginemos que un telescopio terrestre recibe...
Aterrizaje del lanzador del JCSat-14 A las 5:21 UTC del 6 de mayo de 2016 un cohete Falcon 9 FT de SpaceX despegaba de Cabo Cañaveral con la misión de poner en órbita el satélite de telecomunicaciones JCSat–14 y con el objetivo...
Totalmente de película; si no fuera porque es un vídeo desde un cohete relativamente «pequeño» / «casero» se diría que es algo salido de una película o que está editado con lo último en modelado 3D. Pero no: se trata de...
Glaciar Austfonna – Contains modified Copernicus Sentinel data [2016], processed by ESA Isla Edgeøya – Contains modified Copernicus Sentinel data [2016], processed by ESA A las 5:37 UTC del 28 de abril de 2016, apenas dos días después de su lanzamiento, el...
Una de las peores emergencias que puede ocurrir a bordo de una nave espacial es que se declare un incendio. En este vídeo el astronauta Andreas Mogensen de la Agencia Espacial Europea cuenta qué hacer si se produce un incendio a...
La misión ExoMars de la Agencia Espacial Europea y Roscosmos está formada por dos lanzamientos, uno ya realizado en 2016, y otro que estaba previsto para 2018. El primero fue el que el 14 de marzo de 2016 puso al orbitador Trace...
Apenas dura 40 segundos, pero en el vídeo de arriba se puede ver el aterrizaje de la primera etapa del cohete Falcon 9 que el pasado 8 de abril de 2016 conseguía posarse de una pieza en el espaciopuerto flotante autónomo...
Aunque el primer lanzamiento de un cohete Soyuz desde el Cosmódromo Vostochni puso en órbita los tres satélites que tenía previsto sin ningún problema las cosas en tierra no parecen haber ido tan bien ya que el lanzamiento ha causado desperfectos...
Por ahora se sabe poco más de lo que dice un teaser-tuit, pero SpaceX dice tener intención de hacer aterrizar una versión modificada de la cápsula Dragon V2 en Marte –sí, se puede aterrizar en Marte– en 2018. La Dragon V2...
SAM, de Sample Analysis at Mars, Análisis de Muestras en Marte, es uno de los instrumentos del rover Curiosity, que lleva desde el 6 de agosto de 2012 explorando Marte; de hecho SAM representa más de la mitad de la carga útil...
El satélite Irnss–7G antes de su encapsulado para el lanzamiento Con el lanzamiento del satélite Irnss–1G la India ya tiene en en espacio los siete satélites que forman el Indian Regional Navigation Satellite System, o Sistema de Navegación Regional Indio, su equivalente...
Según se puede leer en su último comunicado al respecto la Agencia Japonesa de Exploración Aeroespacial da oficialmente por perdido el telescopio espacial de rayos X Hitomi; dicen también que lo que harán será intentar entender qué pasó para, al menos aprender...
A las 4:06:59 UTC del 28 de abril de 2016 la etapa superior Volga del primer cohete Soyuz 2–1A lanzado desde el cosmódromo Vostochni se separaba de los satélites Mikhailo Lomonosov y Aist-2D, dejándolos en su órbita inicial sin problemas; apenas...
Los técnicos del Centro Espacial Goddard de la NASA han tenido una semana ocupada retirando las tapas de los 18 espejos hexagonales que forman el espejo primario del telescopio espacial James Webb. Estos espejos están fabricados en berilio y recubiertos de...
El lanzamiento de estreno del cosmódromo Vostochni ha tenido que ser aplazado 24 horas porque el sistema automático de control del lanzamiento detectó un problema con la presurización de los tanques del Soyuz 2–1A que tiene que poner en órbita los...
Impresión artística del encuentro de la New Horizons con un objeto del cinturón de Kuiper - NASA/JHUAPL/SwRI/Alex Parker Cuando el 14 de julio de 2015 la sonda New Horizons pasó por el sistema formado por Plutón y sus lunas lo hizo zumbando...
El Mikhailo Lomonosov a punto de ser acoplado a la tercera etapa de su lanzador La carga útil del lanzamiento antes de envolverla en la cofia protectora Integración de la carga útil con la tercera etapa Volga El Soyuz–2 ya ensamblado y...
Despegue del Sentinel1–B – ESA–Manuel Pedoussaut, 2016 Tras dos aplazamientos debido a las condiciones meteorológicas y un tercero por motivos técnicos debido al fallo de un componente de la etapa Fregat rápidamente solucionado por Roscosmos al sustituir el módulo problemático por otro...
El Soyuz en el hangar móvil de servicio durante el intento de lanzamiento del 24 de abril de 2016 El fallo de una de las tres unidades inerciales SYZ de la etapa Fregat del cohete Soyuz que tiene que lanzarlo hizo que,...
Hace unos días he descubierto el documental web Lunar Exploration – así lo llama la Agencia Espacial Europea– y me ha parecido impresionante. Cuenta la historia de la Luna y lo que hemos ido aprendiendo de ella tanto mediante observaciones como...
Kourou el 24 de abril de 2016 [Actualización 22:00 Un fallo en la unidad inercial del Soyuz, que sirve para detectar su orientación, ha obligado a cancelar el lanzamiento. Este se volverá a intentar el 25 de abril, una vez sustituida la...
Según se puede leer en Kepler Recovered and Returned to the K2 Mission el telescopio espacial Kepler vuelve a estar en servicio desde las 15:30 UTC del 22 de abril de 2016. Esto quiere decir que está listo para ponerse a...
Objetivo cumplido: 42,195 kilómetros en la cinta de ejercicio de la EEI Tal y como estaba previsto el astronauta de la Agencia Espacial Europea Tim Peake tomaba la salida en la mañana del 24 de abril de 2016 junto con los otros...
Su nombre no es precisamente conocido, pero el italiano Umberto Guidoni fue el primer astronauta de la Agencia Espacial Europea en entrar en la Estación Espacial Internacional. Ocurrió el 23 de abril de 2001, como miembro de la tripulación de la...
El edificio de servicio a punto de «engullir» al Soyuz [Actualización 19:45: este intento de lanzamiento también ha tenido que ser aplazado 24 horas por vientos demasiado fuertes en altura, que pueden desestabilizar el cohete y hacer fracasar el lanzamiento] Vientos demasiado...
Tim Peake con la camiseta del maratón de Londres 2016 en el Centro Europeo de Astronautas en Colonia El domingo 24 de abril de 2016 se celebra la maratón de Londres, que este año tendrá un participante extra un tanto especial. Se...
En el momento del lanzamiento aproximadamente el 94% de la masa de un Saturno V era propelente; lo típico de un avión al despegue ronda el 30%. Sólo un 0,2% de su masa volvía a Tierra. En los cohetes actuales en...
Ya sé que al paso que vamos los vídeos en 360º se van a convertir en los nuevos PPT de gatitos, pero este, grabado desde el microBloon 2.0, mola mucho porque ofrece una idea de lo que se verá desde la...
Para quien quiera sentirse un poco más insignificante los cosmólogos del Center for Complex Network Research han recreado en esta visualización cómo es lo que han dado en denominar «la gran telaraña cósmica» (cosmic web). El concepto de visualización del universo...
[Actualización: vientos en altura demasiado fuertes obligaron finalmente a aplazar el lanzamiento 24 horas] Con la llegada por tren del cohete Soyuz que lo va a lanzar y la posterior llegada por carretera del satélite propiamente dicho, ya encapsulado en su...
Procedentes de los restos del cometa C/1861 G1 Thatcher, la lluvia de estrellas de las Líridas tiene lugar cada año aproximadamente entre el 16 y el 25 de abril, cuando la Tierra recorre la parte de su órbita en la que...
Puede parecer una idea insólita, pero desde hace décadas muchos consideran que el ascensor espacial es la más práctica y probable forma de construir grandes estructuras en el espacio, subir carga útil al espacio e incluso personas. Para empezar, ahorrarían una...
Permanentemente habitada desde el año 2000, la Estación Espacial Internacional es una de las cosas más complejas que jamás hayamos construido y ha supuesto una enorme inversión en tiempo y dinero, con lo que hay un cierto interés en conservar esa...
La Salyut 1 con una Soyuz acoplada – Pics about space El 19 de abril de 1971 la Unión Soviética ponía en órbita la Salyut 1, una estación espacial con capacidad para tres tripulantes capaz de albergarlos durante periodos de tiempo prolongados...
Sabía de la existencia de instalaciones como la Neutral Buoyancy Facility del Centro Europeo de Astronautas o el Neutral Buoyancy Laboratory en el Centro Espacial Lyndon B. Johnson y sus equivalentes rusos y de otras nacionalidades que son como grandes piscinas...
Impresión artística del Sentinel-2A en órbita - ESA/ATG medialab Diseñado para obtener imágenes de alta resolución de la Tierra en el espectro visible y en el infrarrojo cercano, en un total de 13 bandas, gracias al Multi Spectral Imager o MSI, su...
Los astronautas de la Estación Espacial llevan desde principios de año grabando con una cámara RED algo más que los experimentos de laboratorio: espectaculares vistas de ese colorido gran globo alrededor del cual orbitan y que llamamos Tierra. La resolución de...
La JAXA, la Agencia Japonesa de Exploración Aeroespacial, tiene más ya claro qué es lo que pasó para que el telescopio espacial de rayos X Hitomi terminara roto en varios fragmentos y dando tumbos sin control el pasado 26 de marzo de...
Cinco minutos de impresionantes imágenes en 4K grabadas en la Estación Espacial Internacional y que forman parte del tipo de contenido que ofrece NASA UHD, por ahora sólo vía satélite, aunque pronto esperan tenerlo en línea. Claro que el canal en...
No es un vídeo oficial, aunque podría pasar por uno: SpaceX Falcon 9 Development Supercut resume en algo menos de cinco minutos los menos de cuatro años que han pasado entre las primeras pruebas del Grasshopper de SpaceX hasta el aterrizaje...
El 12 de febrero de 1985 una serie de errores por parte de los controladores de la misión hicieron, casi literalmente, saltar el sistema eléctrico de la estación espacial soviética Salyut–7 por los aires, aunque afortunadamente en aquel momento no había...
BEAM durante su instalación – Tim Kopra / NASA Después de dejar unos días para que se aclimatara tras su llegada a la Estación Espacial Internacional a bordo de la cápsula de carga Dragon SpX–8 el módulo BEAM fue acoplado al módulo...
El multimillonario Yuri Milner acaba de presentar Breakthrough Starshot, un proyecto a veinte años vista dotado con 100 millones de dólares que tiene como objetivo desarrollar las tecnologías necesarias para enviar una misión espacial a Alfa Centauri, el sistema estelar más...
Desde el 12 de abril de 2001, coincidiendo con el 40 aniversario del primer vuelo espacial tripulado a cargo de Yuri Gagarin, se celebra de forma informal en todo el mundo La noche de Yuri con el objetivo de aumentar el...
Buenas noticias desde la NASA: tal y como se puede leer Kepler Recovered from Emergency and Stable el telescopio espacial Kepler vuelve a estar bajo control desde el domingo 10 de abril de 2016, tras haberlo conseguido sacar del modo de emergencia...
El 8 de abril de 2016 SpaceX marcó un hito en la historia de la exploración espacial al conseguir recuperar la primera etapa de uno de sus cohetes tras un lanzamiento orbital haciéndola aterrizar en una plataforma flotante a varios cientos...
El 11 de abril de 2006 la sonda Venus Express de la Agencia Espacial Europea llevaba a cabo con éxito la maniobra de inserción orbital que permitió que la gravedad de Venus la capturara. Esta maniobra ponía el punto final a...
El 8 de abril de 2016 a las 14:16 UTC la cápsula de carga Progress M-29M reentraba en la atmósfera el este de Nueva Zelanda para su destrucción controlada; llevaba a bordo materiales de desecho de la Estación Espacial Internacional, tanto...
Aunque llegó con un poco de retraso sobre el horario previsto debido a un rozamiento con la atmósfera mayor de lo esperado –la atmósfera es un sistema dinámico que no siempre se comporta igual– la cápsula de carga Dragon SPX–8 quedaba...
Por ahora no hay muchos detalles, pero según se puede leer en Mission Manager Update: Kepler spacecraft in emergency mode el telescopio espacial Kepler está en modo de emergencia. El modo de emergencia es el más básico en el que puede...
A la quinta ha sido la vencida: después de lanzar la cápsula de carga Dragon SpX-8 rumbo a la Estación Espacial Internacional la primera etapa del cohete Falcon 9 FT encargada del lanzamiento aterrizaba en el espaciopuerto flotante autónomo Of Course...
Hitomi dando tumbos el 2 de abril de 2016 La Agencia Japonesa de Exploración Aeroespacial ha dado una rueda de prensa con información actualizada acerca del estado del observatorio espacial de rayos X Hitomi, con el que no tienen contacto desde el...
Todo está listo en el Complejo de Lanzamiento Espacial 40 de Cabo Cañaveral para el lanzamiento de la cápsula de carga Dragon SpX-8 rumbo a la Estación Espacial Internacional, previsto para las 20:43 UTC del viernes 8 de abril de 2016,...
Envalentonadas por el éxito del alunizaje suave de la sonda Luna 9 el 3 de febrero de 1966 las autoridades soviéticas decidieron que el siguiente hito del programa espacial soviético bien podía ser colocar una sonda en órbita alrededor de la Luna...
Con la fragmentación de la Unión Soviética el cosmódromo de Baikonur, desde el que despegó Yuri Gagarin, dejó de pertenecer a Rusia, que desde entonces viene alquilando su uso a Kazajistán por unos 115 millones de dólares al año. Así que...
El cohete New Shepard de Blue Origin que ya había salido al espacio el 23 de noviembre de 2015 y el 22 de enero de 2016 volvió a ser lanzado con éxito por tercera vez el 2 de abril de 2016,...

Fotos vía Jeff Williams Otro éxito para las Progress MS, la versión más reciente de la veterana cápsula de carga primero soviética y ahora rusa, con la llegada de la Progress MS-2 a la Estación Espacial Internacional a las 17:57:46 UTC...
El pasado 26 de marzo de 2016 la Agencia Japonesa de Exploración Aeroespacial, JAXA, perdía el contacto con Hitomi, su telescopio de rayos x lazado el 17 de febrero de 2016 y que aún estaba en fase de calibración. Las primeras observaciones...
Tal y como estaba previsto un cohete Soyuz 2–1A despegó del emplazamiento 31/6 del cosmódromo de Baikonur a las 16:23:57 UTC del 31 de marzo de 2016 con la cápsula de carga Progress MS–2 como única carga. Tras un ascenso sin...
La NASA está dándole vueltas a enviar una sonda a Europa a finales de los 2020 para intentar averiguar si hay vida debajo de la capa de hielo que cubre esta luna de Júpiter, y una de las cosas que vendría...
En 2015 la Agencia Espacial Europea organizó una campaña para recoger dibujos de niños y adolescentes de entre 8 y 14 de los países miembros de la ESA o de sus estados asociados para decorar dos placas del telescopio espacial Cheops,...
Fotos: Roscosmos Todo está listo en el emplazamiento 31/6 del cosmódromo de Baikonur para el lanzamiento de la cápsula de carga Progress MS-2, conocida como Progress 63 por la NASA, rumbo a la Estación Espacial Internacional; es el primero de los...
Aunque han sido demasiado cortas como para que sirvan de mucho, la Agencia Japonesa de Exploración Aeroespacial ha conseguido captar señales del telescopio espacial de rayos X Hitomi en dos ocasiones después de perder el contacto con él el pasado 26...
En 4K, para uso y disfrute de todos los espaciotrastornados del mundo, un time lapse del proceso de integración de la Trace Gas Orbiter y el aterrizador Schiaparelli, el traslado del Protón M que los lanzó a la plataforma de lanzamiento,...
Hasta ahora todos los módulos de cualquier nave o estación espacial que hayamos lanzado han sido rígidos, aunque hay una vieja idea, que es la de utilizar módulos hinchables, que pueden ofrecer mucho más volumen útil que los módulos rígidos, una...
La misión Hope –Esperanza– de los Emiratos Árabes Unidos con destino a Marte utilizará un lanzador H-IIA de la Agencia Japonesa de Exploración aeroespacial, tal y como se puede leer en United Arab Emirates ‘Hope’ Mars Mission picks Japan’s H-IIA Launch...
Las pocas noticias nuevas que hay tras la pérdida de comunicaciones con el telescopio espacial de rayos X Hitomi de la Agencia Japonesa de exploración Aeroespacial no son precisamente halagüeñas. Por un lado el Joint Space Operations Center de los Estados...
Desde el Sol hasta Plutón, con los añadidos de la Luna y Miranda, el conjunto de rocas del sistema solar de pebbleplush puede hacer las delicias de cualquier espaciotrastornado, tenga la edad que tenga. Son doce cojines/almohadas por un poco menos de...
El 13 de marzo de 1986 la sonda Giotto de la Agencia Espacial Europea se aproximó a 596 km del núcleo del cometa Halley, fotografiando un cometa de cerca por primera vez en la historia. Para celebrar el encuentro la ESA...
Tal y como se puede leer –más o menos– en Communication failure of X-ray Astronomy Satellite “Hitomi” la Agencia Japonesa de Exploración Aeroespacial, JAXA, ha perdido el contacto con su observatorio espacial de rayos X. Hitomi, que en japonés quiere decir...
Tal y como estaba previsto en la mañana del 26 de marzo de 2016 la cápsula de carga Cygnus CRS OA-6 «Rick Husband» alcanzaba de forma autónoma la posición de espera a unos 14 metros por debajo de la Estación Espacial...
Tranquility, la Cúpula, y Sam Cristoforetti Zarya y André Kuipers ISS Virtual Tour es lo más parecido que el común de los mortales podremos disfrutar a estar dentro de la Estación Espacial Internacional. Incluye vistas en 360º de cada uno de los...
Aunque hubo una discrepancia de algo más de un minuto entre el tiempo de funcionamiento real del motor de la segunda etapa de su lanzador y el publicado, así como un retraso en la separación de la Cygnus CRS OA-6 de...
Tras diez días en el espacio la combinación Trace Gas Orbiter/Schiaparelli de la misión ExoMars 2016 de la Agencia Espacial Europea está funcionando perfectamente, tal y como se puede leer en ExoMars performing flawlessly. Las pruebas iniciales de los sistemas de energía,...
Todo está listo en el complejo de lanzamiento 41 de la Estación de la Fuerza Aérea de Cabo Cañaveral para el despegue rumbo a la Estación Espacial Internacional a lomos de un cohete Atlas V de la cápsula de carga Cygnus...
Aunque los cohetes son una cosa espectacular lo cierto es que son muy poco eficientes: un Ariane 5 ECA como el que se utilizará para lanzar el telescopio espacial James Webb tiene una masa al lanzamiento de 770 toneladas para una...
La Soyuz TMA-20M en aproximación a la EEI sobre Nueva Zelanda – vía @astro_timpeake Tras despegar de la plataforma de Gagarin del cosmódromo de Baikonur a las 21:26 UTC del 18 de marzo de 2016 con Aleksey Ovchinin, Oleg Skripochka y Jeffrey...
El centro de actividad de los primeros tiempos del programa espacial estadounidense, en el que se llevaba a cabo la preparación de las cápsulas Mercury –no te pierdas su tamaño– y el alojamiento y entrenamiento de sus tripulantes –tanto chimpancés como...
Canyval-X – NASA/Brittany Klein Cuando pensamos en un telescopio normalmente nos viene a la cabeza la imagen de un tubo más o menos largo que contiene unas lentes, pero en realidad el tubo no es necesario. Ya en el siglo XVII se...
Este planetario simplificado con el Sol, la Tierra y la Luna (obviamente tamaños y distancias no están ni remotamente a escala) es una genial creación del maestro Jason de JK Brickworks. Lo bueno es que es completamente mecánico y se mueve;...
Todas las fotos vía NASA – Más en Expedition 47 Todo está listo en la plataforma de Gagarin del cosmódromo de Baikonur para el lanzamiento de la cápsula tripulada Soyuz TMA-20M rumbo a la Estación Espacial Internacional el 18 de marzo...
Bloque central de la Mir Después del lanzamiento de su su primer módulo el 20 de enero de 1986 la estación espacial Mir se convirtió en aquel entonces en el buque insignia del programa espacial soviético, dejando obsoletas a las estaciones Saliut...
He dicho a menudo que para mí el momento más brillante de la historia de la NASA la misión Apolo 13, cuando a pesar de encontrarse con una nave seriamente dañada a miles de kilómetros de la Tierra el trabajo en...
Despegue del Protón–M – ESA–Stephane Corvaja, 2016 A las 9:31:42 UTC del 14 de marzo de 2016 un cohete Protón–M despegaba del cosmódromo de Baikonur para lanzar la misión ExoMars 2016 rumbo a Marte. Pero a pesar de ser el cohete más...
Después de haber visto la Tierra desde el espacio tenemos que empezar a vernos más como miembros de su tripulación que como pasajeros. – Samanta Cristoforetti, astronauta Si vives cerca de un cine IMAX o cerca de un centro de ciencia que...

Superando en epicidad a ese gran clásico, Chimenea en tu hogar, este viejo vídeo con imágenes continuas de la Estación Espacial Internacional durante 20 minutos en gloriosa alta definición 1080p puede venir bien como salvapantallas. Con música relajante y la posibilidad...
Todo está listo en el cosmódromo de Baikonur para el lanzamiento de la primera parte de la misión ExoMars de la Agencia Espacial Europea, en este caso el del orbitador Trace Gas Orbiter y del aterrizador Schiaparelli. El lanzamiento se podrá...
Scott Kelly en la Cúpula de la EEI Tras veinte años de servicio en la NASA y a los pocos días de volver de su misión de un año en la Estación Espacial Internacional Scott Kelly acaba de anunciar que se retira...
Lanzada el 12 de agosto de 2005, a las 21:24 UTC del 10 de marzo de 2006 la sonda Mars Reconnaissance Orbiter de la NASA iniciaba la maniobra para colocarse en órbita alrededor de Marte. Terminada a las 21:51, la MRO...
La esfera problemática del SEIS es la del centro de la imagen – CNES Un fallo en el instrumento SEIS, de Seismic Experiment for Interior Structure, o Experimento Sísmico para Estructura Interior, obligó a finales de 2015 a que la NASA pospusiera...
The chart of cosmic exploration es un póster de aproximadamente 1 metro por 69 centímetros que hará las delicias de cualquier espaciotrastornado que conozcas y al que aún le quede sitio en la pared para colgarlo. Incluye todas las sondas lanzadas...
Preciosas las ilustraciones y curiosísimas las historias del artículo 5 Retro Space Missions That Failed to Launch en Discover. Se trata de proyectos «retro» de la época de la Guerra Fría, con mucho elemento «atómico» por ahí rondando, como era natural....
A la cuarta tampoco ha sido la vencida: la primera etapa del cohete Falcon 9 que puso en órbita con éxito el satélite SES-9 en la noche del 4 al 5 de marzo se estampó contra el espaciopuerto flotante Of Course...
Lo asteroides son la forma que tiene la naturaleza de preguntarnos eso de…¿Qué, cómo va ese programa espacial? – Neil deGrasse Tyson, astrónomo Si ahora mismo descubriéramos un asteroide en rumbo de colisión con la Tierra estaríamos prácticamente indefensos, ya que no...
El aterrizaje en Kazajistán de la Soyuz TMA-18M a las 4:26 UTC del 2 de marzo de 2016 con Scott Kelly, Mikhail Kornienko y Sergei Volkov marcaba el fin de la primera misión de un año de los dos primeros en...
¡Oh Dios mío, está lleno de estrellas! – David Bowman en2001: Una odisea del espacio Cuando Stanley Kubrik puso esa mítica frase en los labios de Dave Bowman tras ver el interior del monolito no podía saber, aunque sí intuir, que había...
Establecer una base permanente en la Luna es una idea que resurge periódicamente, y ahora quien está apostando fuertemente por ella es Jan Woerner, el director general de la Agencia Espacial Europea. En la primera parte de esta pieza de Space...
Sí, los vídeos en 360º llevan el camino de convertirse en los nuevos Powerpoint encadenados o en los gif de gatitos, pero este, que muestra la sonda Mars Pathfinder de la NASA en su punto de aterrizaje en Marte, Sojourner incluido,...
Se suele hablar de Konstantín Tsiolkovski como uno de los padres de la cosmonáutica ya que es, entre otras cosas, el autor de la ecuación del cohete que rige el funcionamiento de estos. Pero más que la ecuación del cohete son...
Los giroscopios me siguen pareciendo unos artilugios fascinantes, así que me ha encantado ver al astronauta Tim Peake mostrando cómo se comporta un giroscopio en caída libre a bordo de la Estación Espacial Internacional , comparando qué sucede cuando está en...
Ninguna de las naves espaciales tripuladas en uso en la actualidad, la Soyuz rusa y la Shenzhou china, vuelan como un avión, y tampoco lo hacen ninguna de las que están en desarrollo, como son la CST-100 Starliner de Boeing y...
Todo está listo en Cabo Cañaveral para el lanzamiento del satélite de comunicaciones SES–9 a bordo de un cohete Falcon 9 FT de SpaceX entre las 23:46 UTC del 24 de febrero de 2016 y la 1:23 del día 25. Y,...
El aterrizador Schiaparelli y la sonda Trace Gas Orbiter ya han sido unidos en el cosmódromo de Kazajistán, en la configuración en la que serán lanzados hacia Marte en la ventana que va del 14 al 25 de marzo de 2016....
Pasadas visibles desde Miami entre el 21 de febrero y el 2 de marzo de 2016 Con sus ocho paneles solares de 35 metros de largo por 12 de ancho permanentemente apuntados hacia en Sol la Estación Espacial Internacional es, tras la...
La Deke Slayton II lista para ser desacoplada de la EEI – NASA/Tim Kopra Llevándola a la posición para liberarla – NASA/Tim Kopra Lista para su liberación – NASA/Tim Kopra Hasta la vista, baby – ESA/Tim Peake Recogiendo el brazo – ESA/Tim...
Un time–lapse fotografiado por Tim Peake desde la Estación Espacial Internacional en el que una aurora parece querer huir del Sol naciente, aunque en realidad es el movimiento de la Estación, que se desplaza a unos 28000 kilómetros por hora, dando...
Un cohete H-IIA lanzaba a las 8:45 GTM del 17 de febrero de 2016 el observatorio espacial Astro–H, que, como es costumbre de la JAXA, la Agencia Japonesa de Exploración Aeroespacial, fue bautizado una vez en órbita. Su nombre es Hitomi,...
Un cohete Rockot lanzado a las 17:57:40 UTC del 16 de febrero de 2016 desde el cosmódromo de Plesetsk en el norte de Rusia ponía en órbita el satélite medioambiental Sentinel-3A. Últimas pruebas antes del lanzamiento – ESA Impresión artística del...
Visions of the Future es la colección de pósteres de turismo espacial del famoso Jet Populsion Laboratory de la NASA, colección que ya incluye 14 destinos que van desde nuestro sistema solar hasta varios planetas extrasolares. Ceres, última oportunidad de coger...
Según se puede leer en Philae se enfrenta a la eterna hibernación la Agencia Espacial Europea considera que las posibilidades de recuperar el contacto con el aterrizador de la misión Rosetta son ya prácticamente nulas, por lo que dejarán de enviarle...
Tras un viaje de unos 4900 millones de kilómetros de siete años y medio de duración la sonda Dawn de la NASA llegaba al planeta enano Ceres el viernes 6 de marzo de 2015 aproximadamente a las 13:36 UTC. Tras ajustar...
Màrius se ha entretenido en descargarse las fotos de la cámara panorámica del rover chino Yutu publicadas por la Administración Espacial Nacional China y montar con ellas este vídeo, que permite recorrer la superficie de la Luna junto con él. La...
El brazo robot en acción – NASA/Chris Gunn Usando un brazo robot capaz de moverlos con la precisión necesaria de fracciones de milímetro los técnicos del Centro Espacial Goddard de la NASA acaban de terminar la instalación de los 18 espejos que...
Auroras boreales, tormentas con rayos, ciudades iluminadas por la noche, el brillo de la atmósfera que nos protege, una cápsula de carga Cygnus que se va… ISS Symphony es otro precioso vídeo en formato time–lapse de imágenes de nuestro planeta, en...
Ingeniero aeroespacial, Charlie Blackwell-Thompson comenzó su carrera profesional en Boeing como ingeniero de software de la carga útil, puesto que la llevo a dirigir las pruebas de varios sistemas que volaron en los transbordadores espaciales de la NASA. En 2004 se unió...
Maqueta del módulo de ciencia de la Luna 9. Su diámetro real era de 58 centímetros y pesaba 99 kg – 2008 IPMS Nats Models Tras ser lanzada el 31 de enero de 1966 a bordo de un cohete Molniya-M desde el...
Chang'e 3 en la superficie de la Luna – Chinese Academy of Sciences / China National Space Administration / The Science and Application Center for Moon and Deepspace Exploration / Emily Lakdawalla La sonda china Chang'e 3 aterrizó (y sí, se puede...
Un cohete Protón–M ponía en órbita geoestacionaria en la noche del 29 al 30 de enero de 2016 el satélite de telecomunicaciones Eutelsat-9B, que tiene como objetivo principal proporcionar señales de televisión digital a Europa. Pero a bordo de ese satélite...
Uno de los problemas que tienen los satélites que están en órbita baja terrestre es que durante la mayor parte del tiempo no están en contacto con estaciones terrestres a las que poder transmitir los datos que han recogido o desde...
Hay algunas cosas que para los espaciotrastornados parecen obvias pero que para muchas personas no lo son – como nos recordó Román. Una de ellas es esa peculiar y suave curva en forma de S repetida con las que se dibujan...

Las flautas en gravedad cero –técnicamente, en «caída libre»– suenan exactamente igual que en Tierra, tal y como comprobó empíricamente la astronauta Cady Coleman el otro día en la Estación Espacial Internacional. En Brucknerite cuentan más sobre otros instrumentos que la...
